

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (10): 2277-2287.doi: 10.16182/j.issn1004731x.joss.23-0679
• Papers • Previous Articles Next Articles
Cheng Lei, Wang Haoyou, Chen Xinjie
Received:2023-06-05
Revised:2023-08-14
Online:2024-10-15
Published:2024-10-18
Contact:
Wang Haoyou
CLC Number:
Cheng Lei, Wang Haoyou, Chen Xinjie. Adaptive Tracking Control for Omnidirectional Vehicle Based on Characteristic Modeling[J]. Journal of System Simulation, 2024, 36(10): 2277-2287.
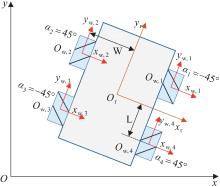
Fig. 1
Chassis geometry for omnidirectional vehicles
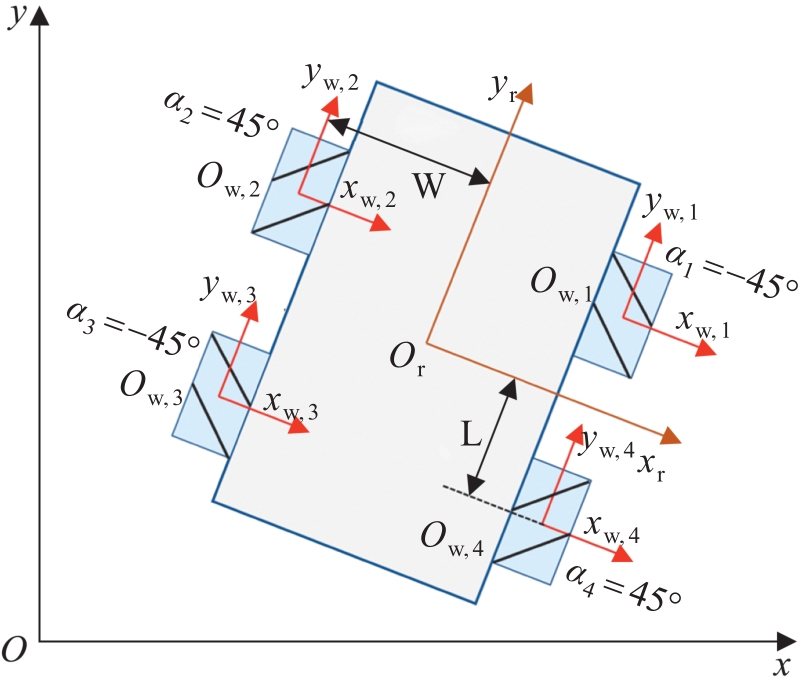
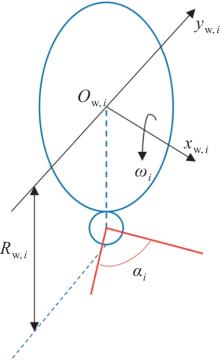
Fig. 2
Schematic diagram of Mecanum wheel structure
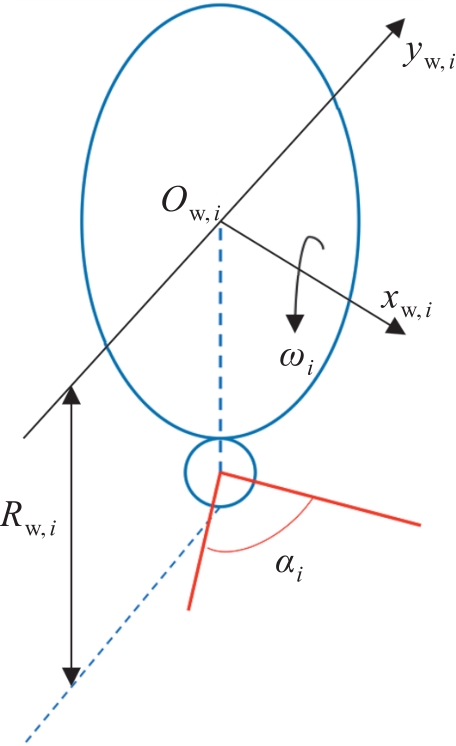
Table 1
Physical parameters of omnidirectional vehicle
| 参数 | 数值 |
|---|---|
| 车辆质量m/kg | 17.1 |
| 车轮半径R/m | 0.076 25 |
| 平台宽度W/m | 0.02 |
| 平台长度L/m | 0.185 |
| 车轮转动惯量Jw/(kg∙m2) | 2.5 |
| 车辆转动惯量Jz/(kg∙m2) | 0.1 |
| 车轮摩擦系数Dw | 0.1 |
| 电机空载转速n/(r/min) | 482 |
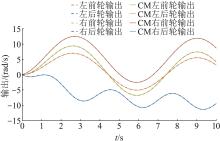
Fig. 3
Comparison of actual output and characteristic model output
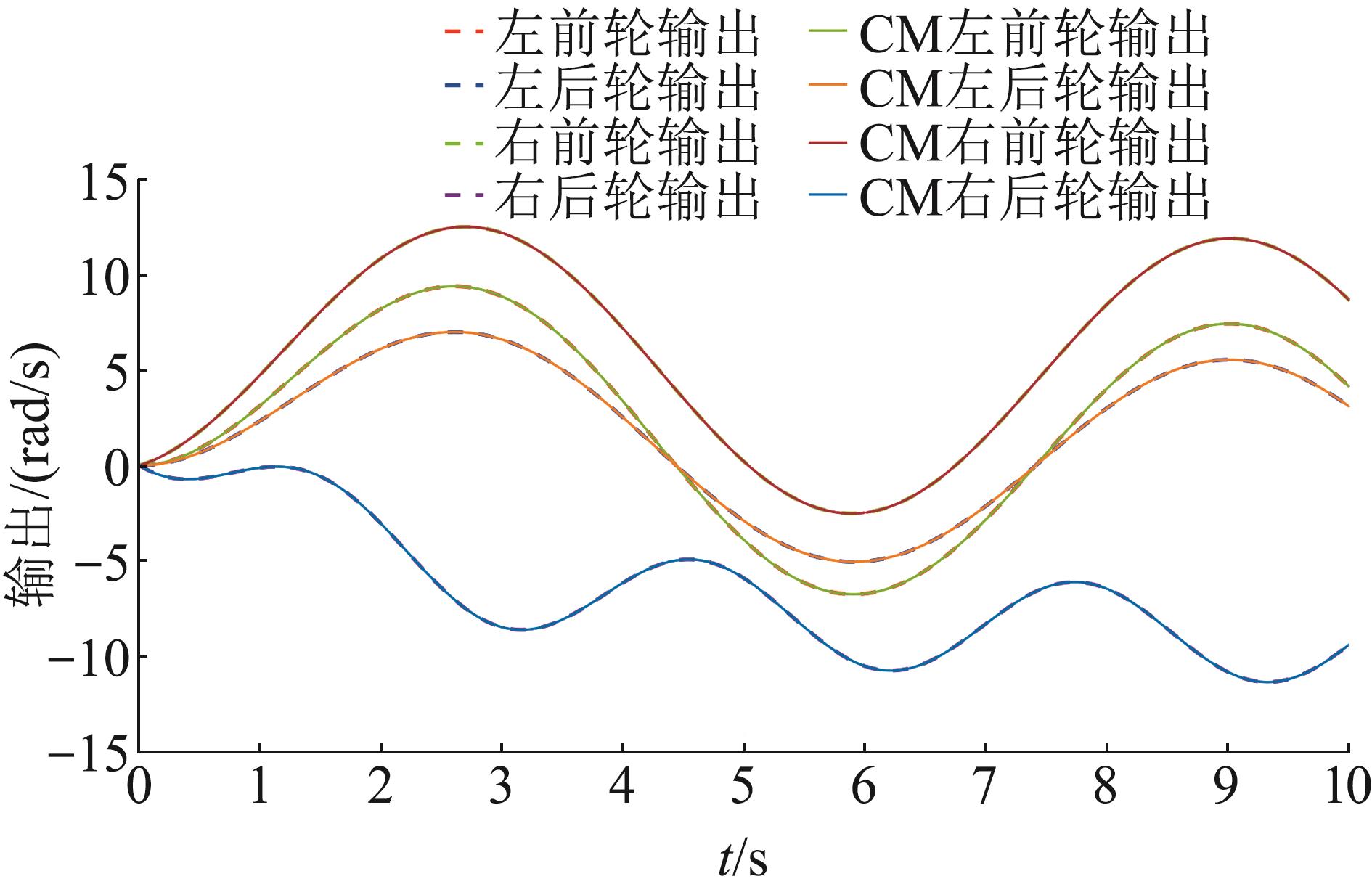
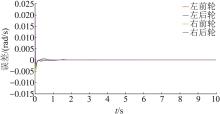
Fig. 4
Output error of the two models
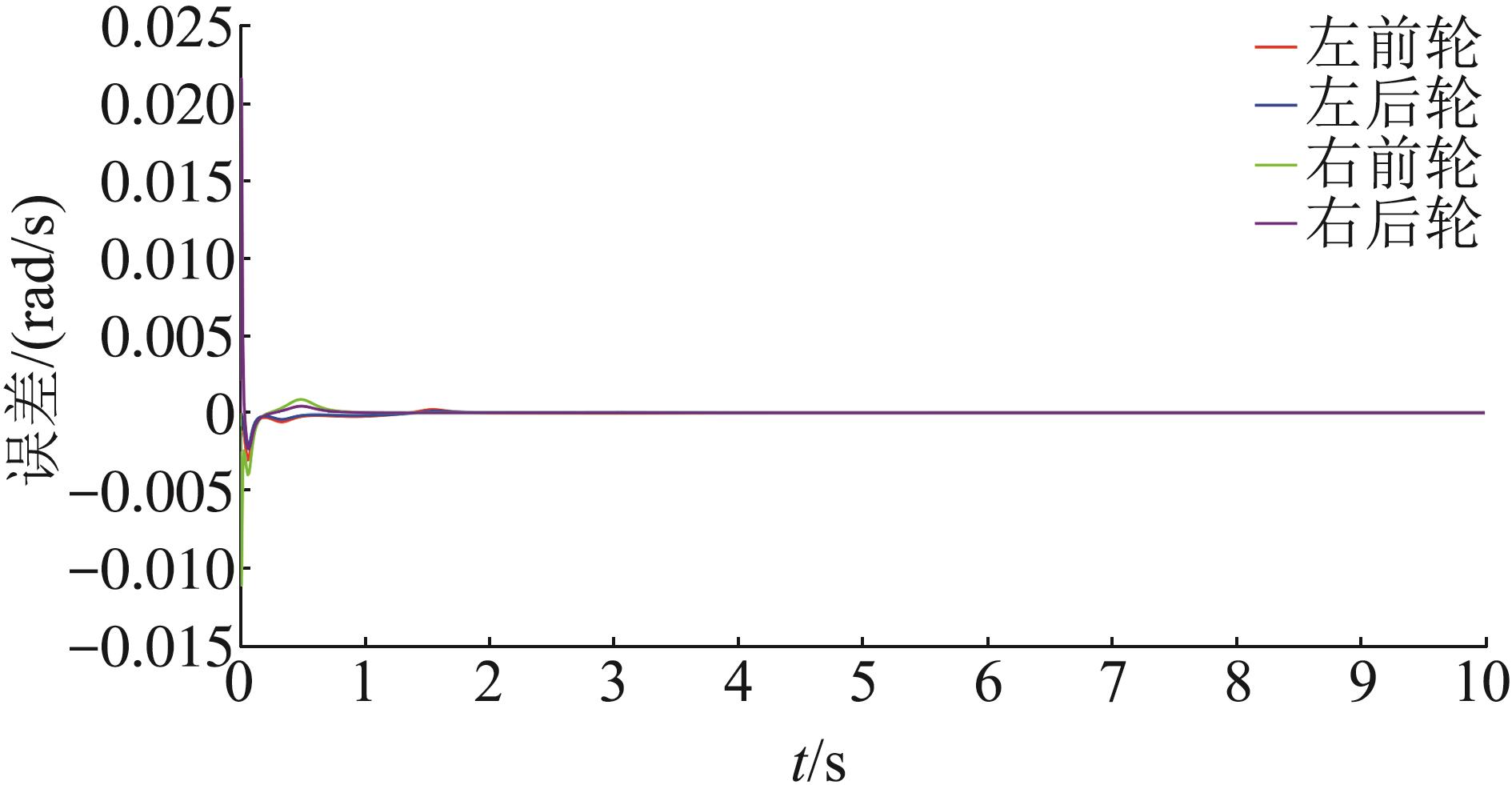

Fig. 5
Speed control system architecture
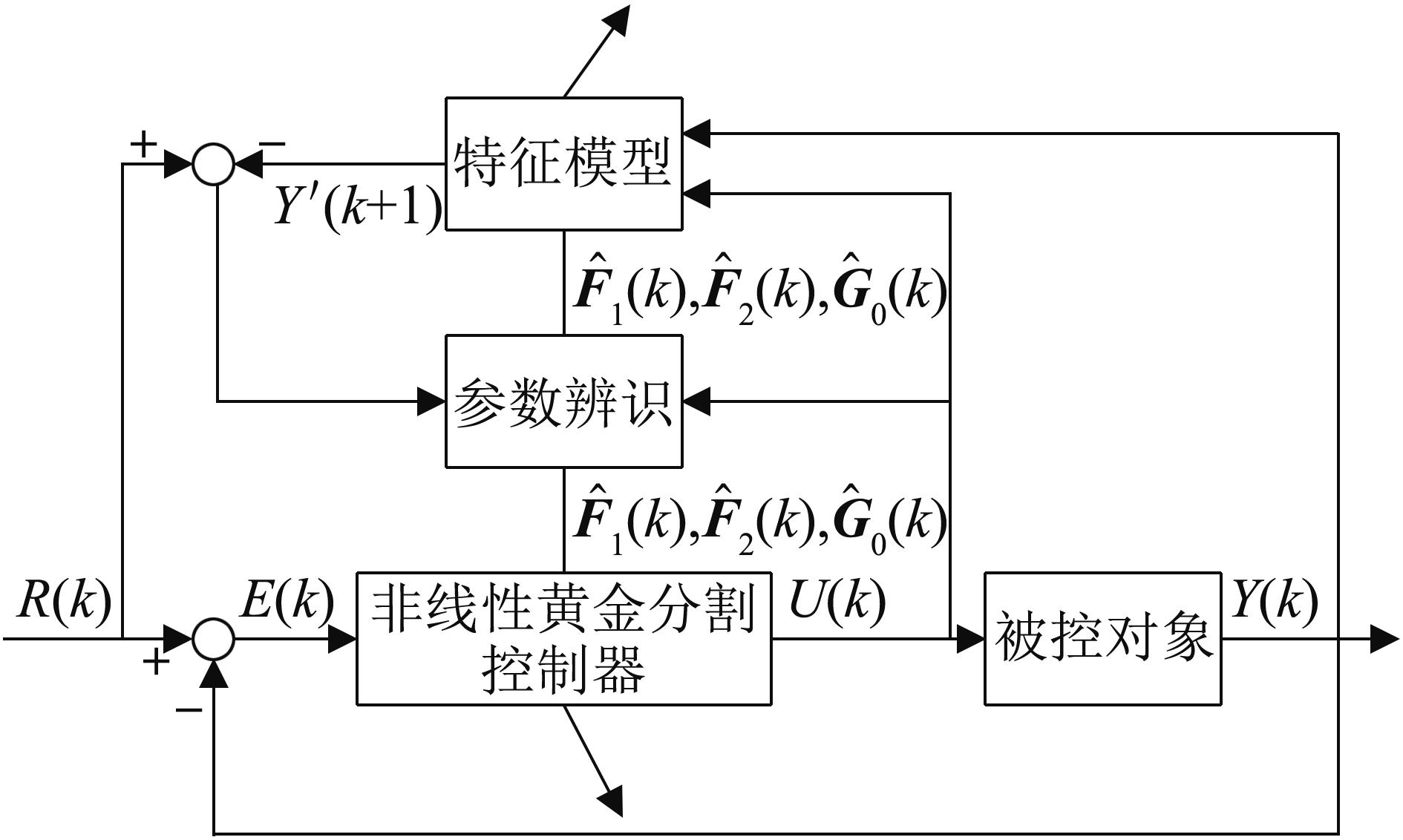
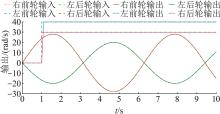
Fig. 6
Nonlinear GSAC output response
Fig. 7
Linear GSAC output response
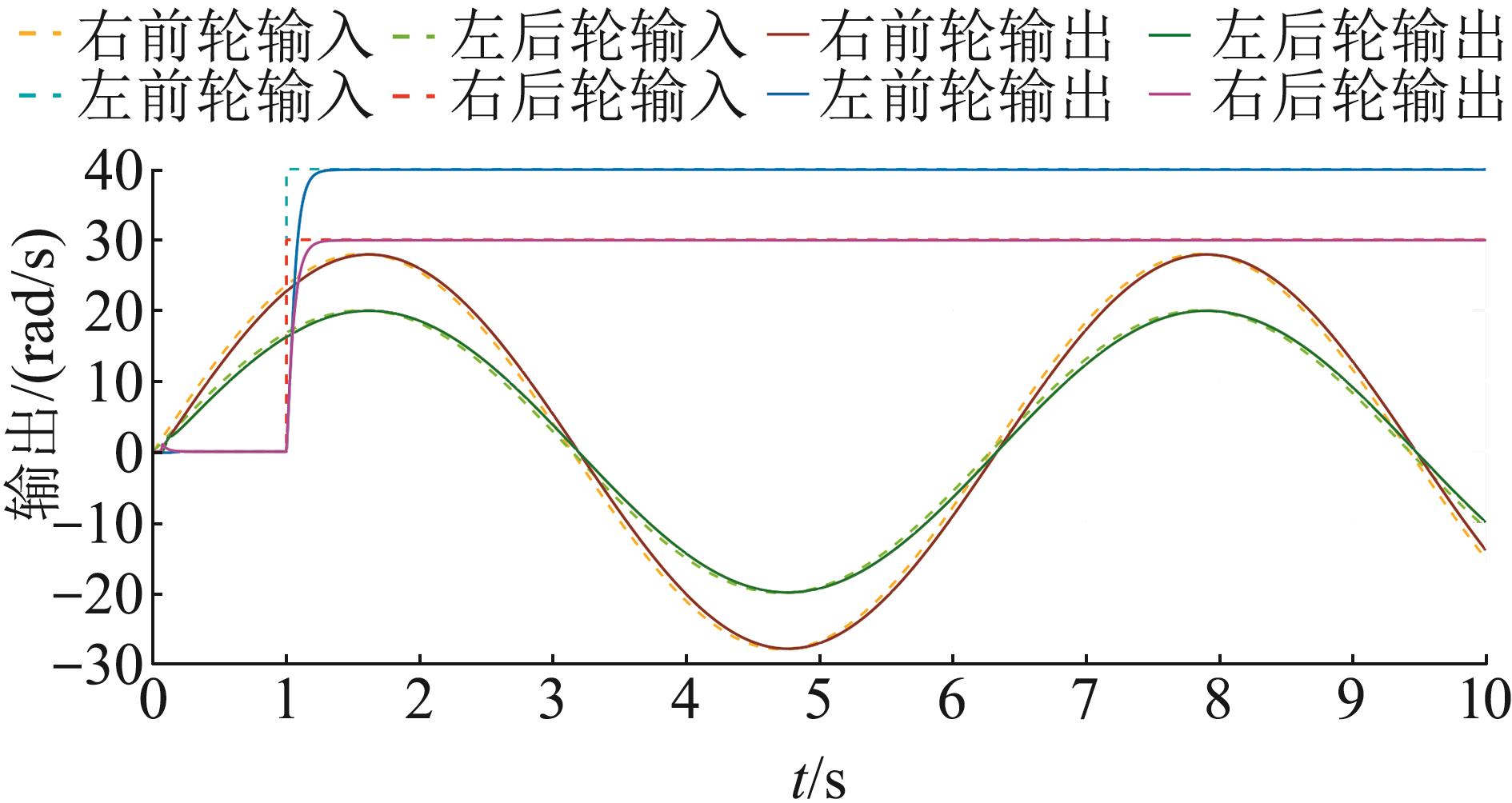
Fig. 8
PID output response

Table 2
Comparison of speed tracking control results
方法 控制 | 性能参数 | 右前轮 | 左前轮 | 左后轮 | 右后轮 |
|---|---|---|---|---|---|
| PID | 超调量/% | — | 6.68 | — | 6.67 |
| 调节时间/s | — | 2.72 | — | 2.74 | |
| 最大偏差/(rad/s) | 2.314 | — | 1.649 | — | |
| 线性GSAC | 超调量/% | — | 0 | — | 0 |
| 调节时间/s | — | 1.22 | — | 1.21 | |
| 最大偏差/(rad/s) | 1.640 | — | 0.910 | — | |
| 非线性GSAC | 超调量/% | — | 0 | — | 0 |
| 调节时间/s | — | 1.09 | — | 1.06 | |
| 最大偏差/(rad/s) | 0.983 | — | 0.100 | — |
Fig. 9
Nonlinear GSAC output response with disturbance
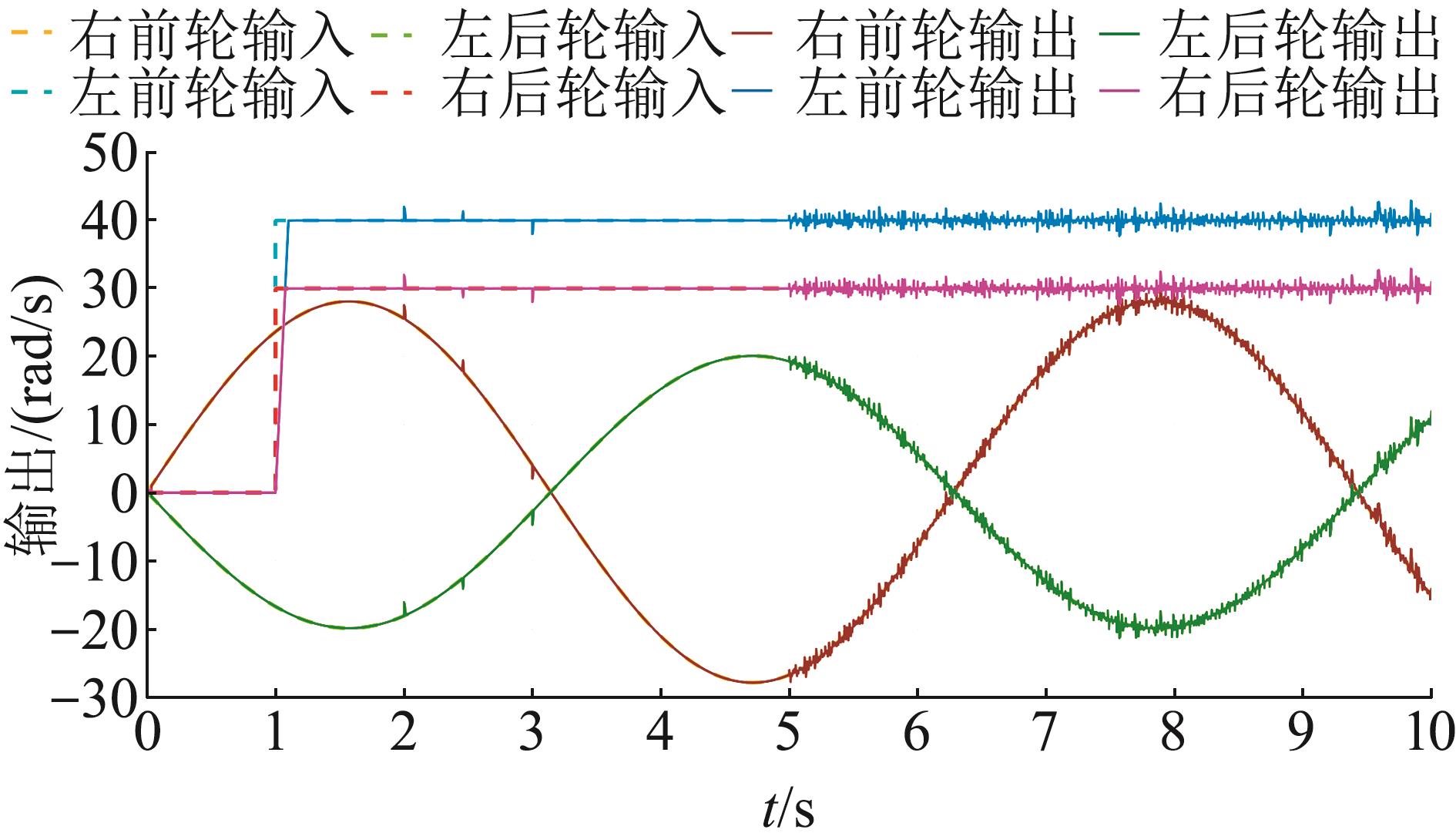

Fig. 10
Nonlinear GSAC output error under different input
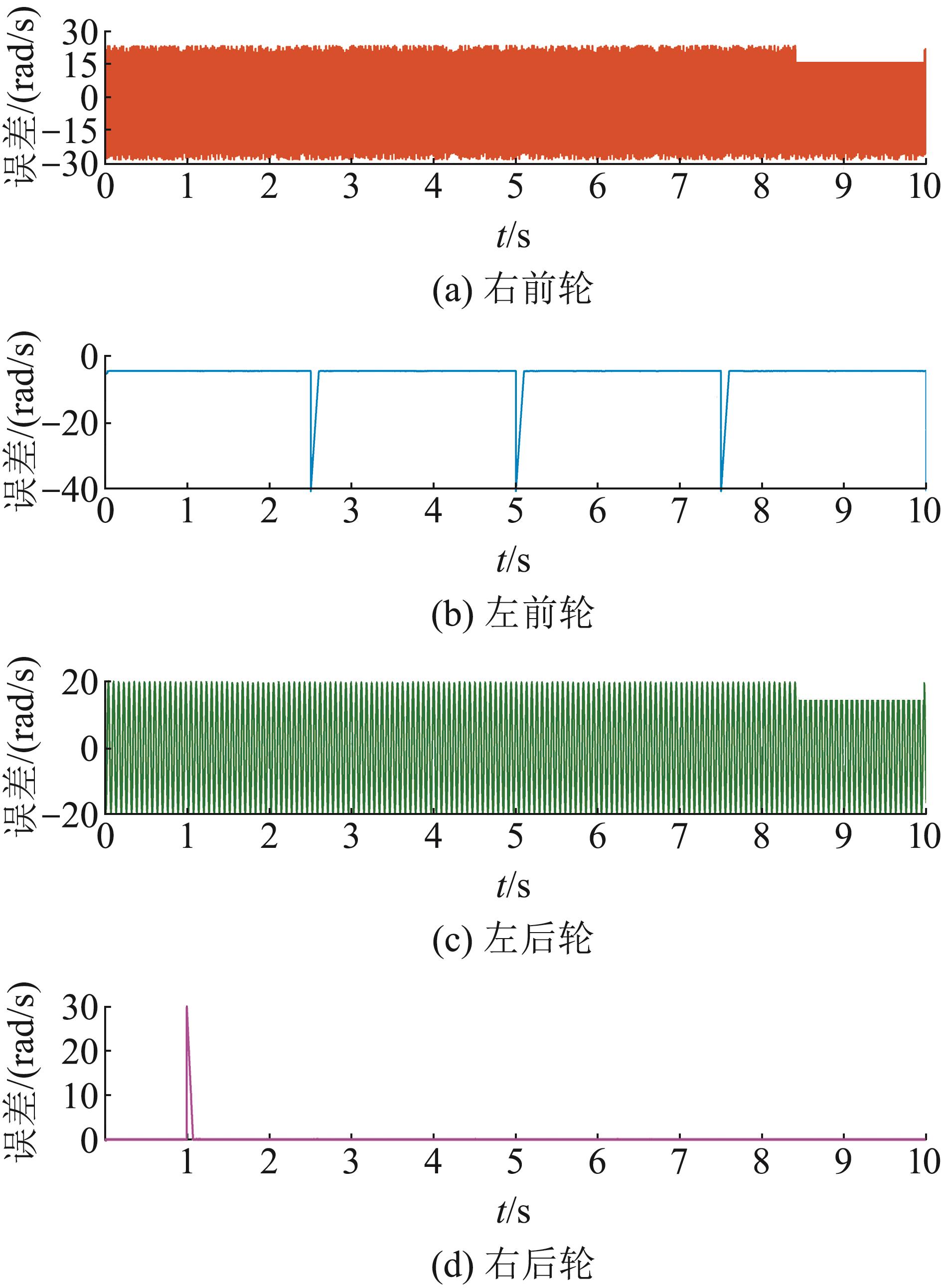
Fig. 11
Trajectory tracking control system architecture
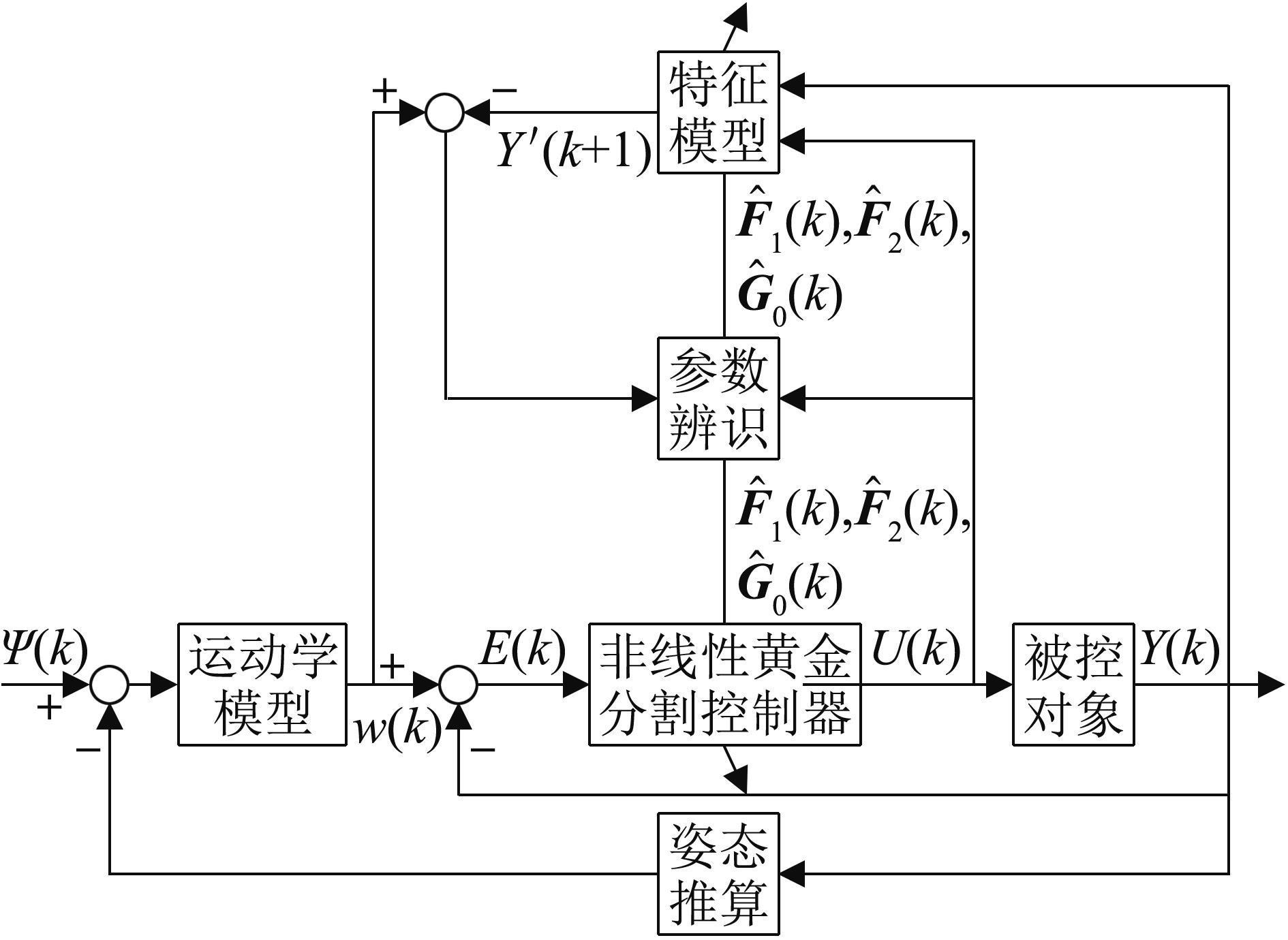
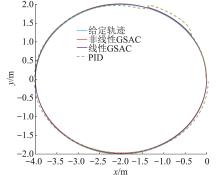
Fig. 12
Circular line tracing results of 3 controllers
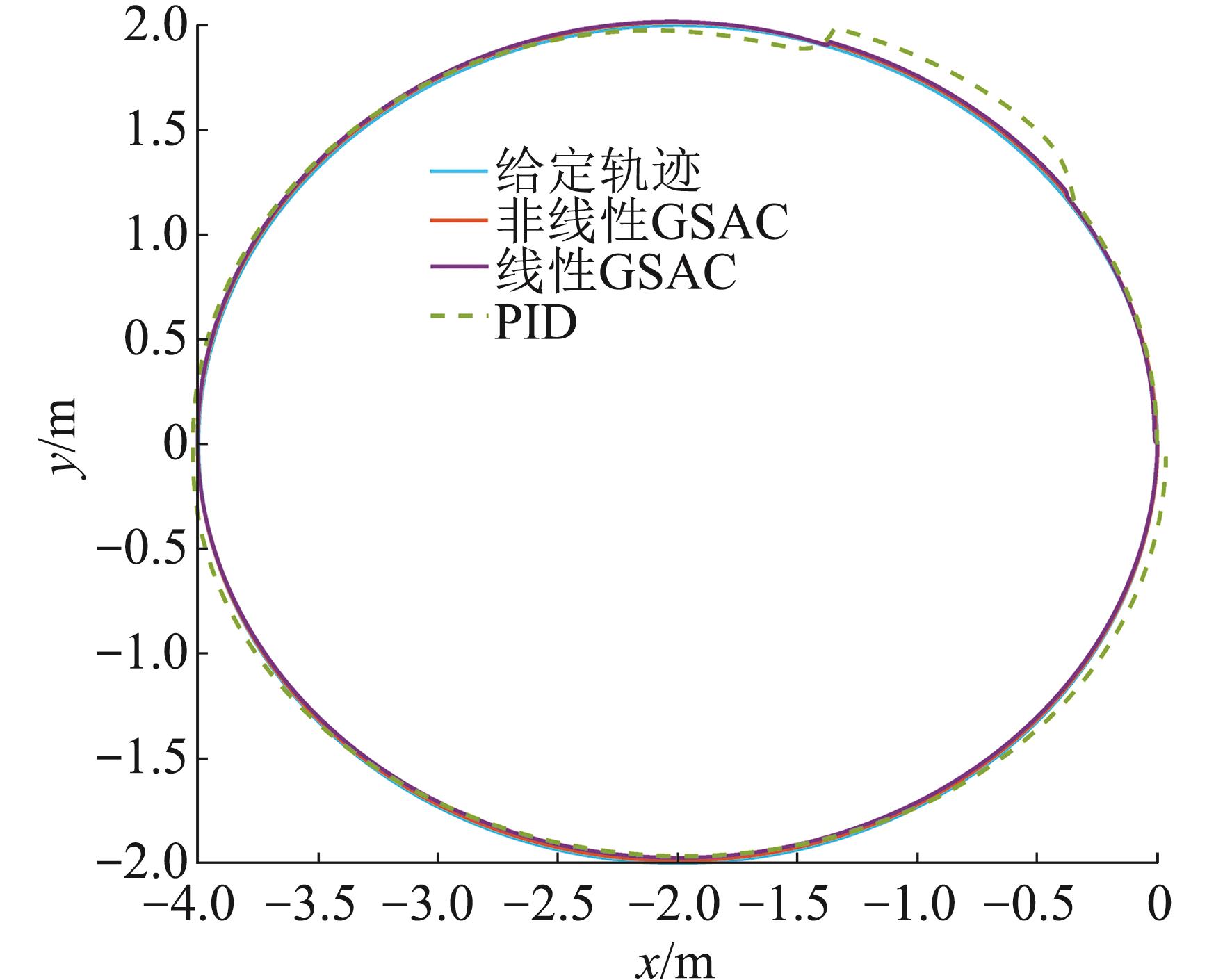
Fig. 13
Tracking error in the x direction
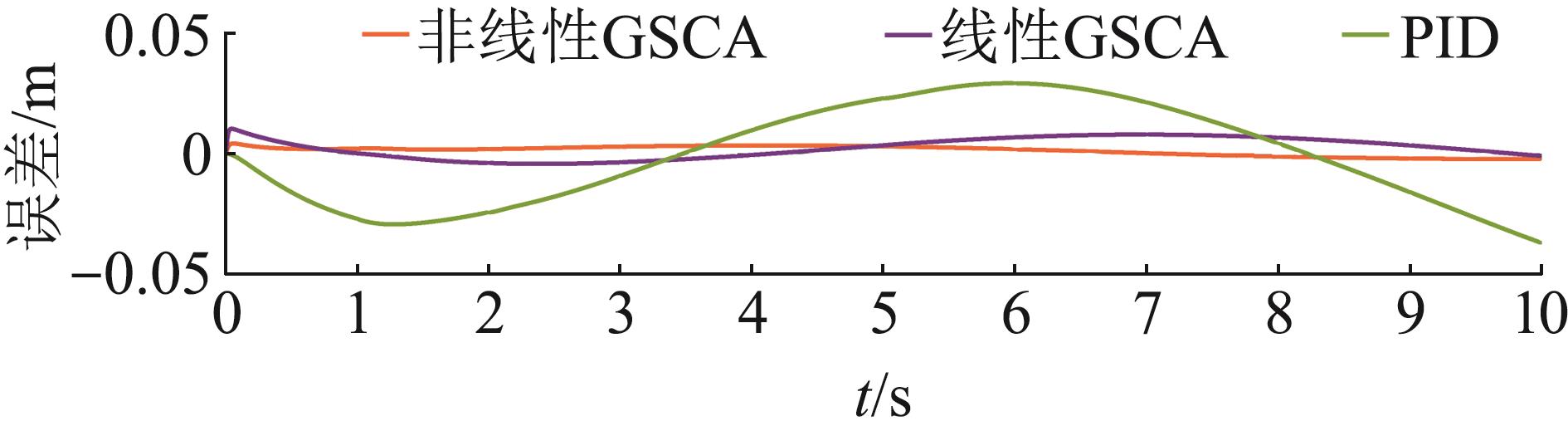
Fig. 14
Tracking error in y direction
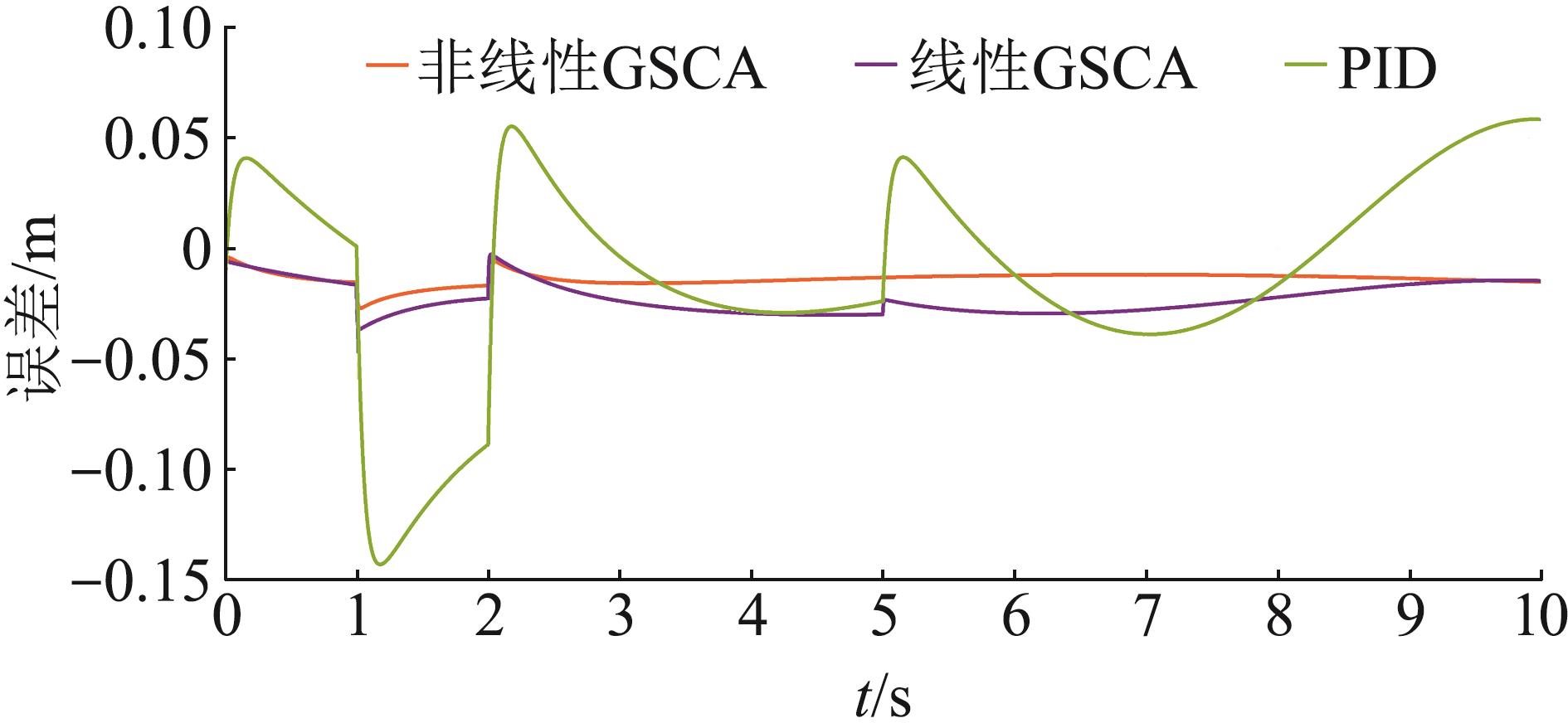
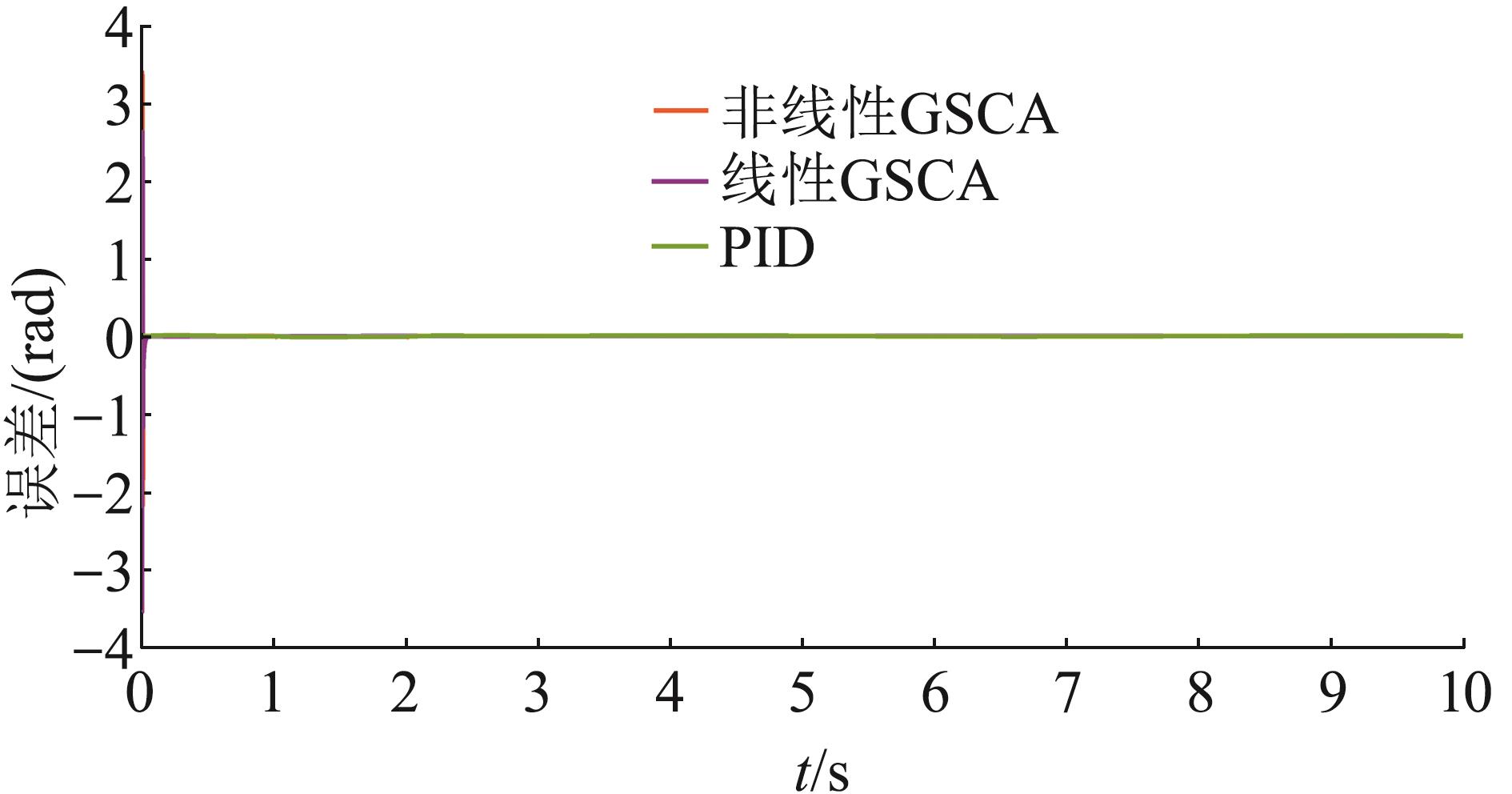
Fig. 15
Tracking error of rotation angle
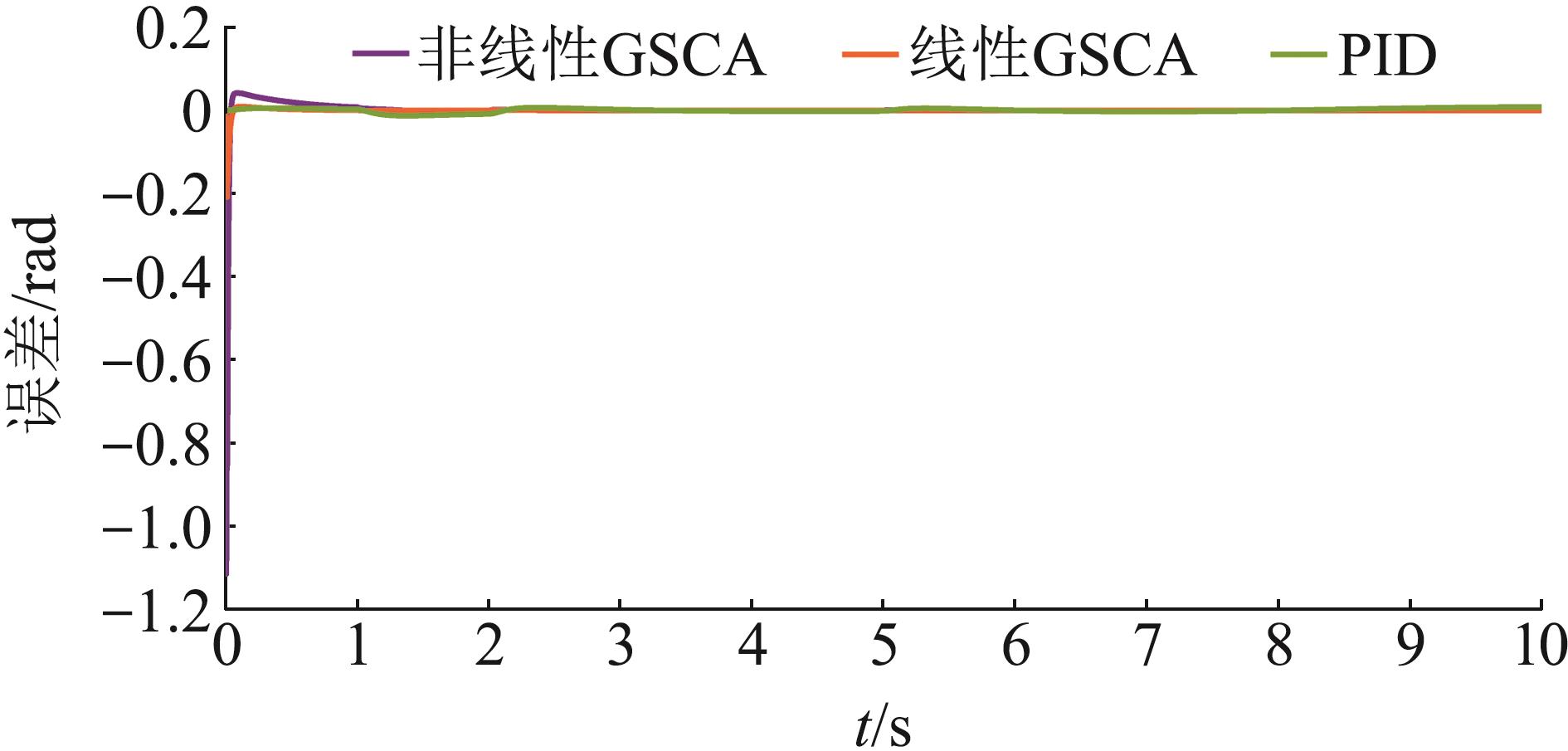
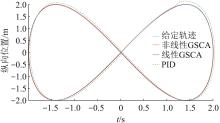
Fig. 16
Twisted pair tracing results of 3 controllers
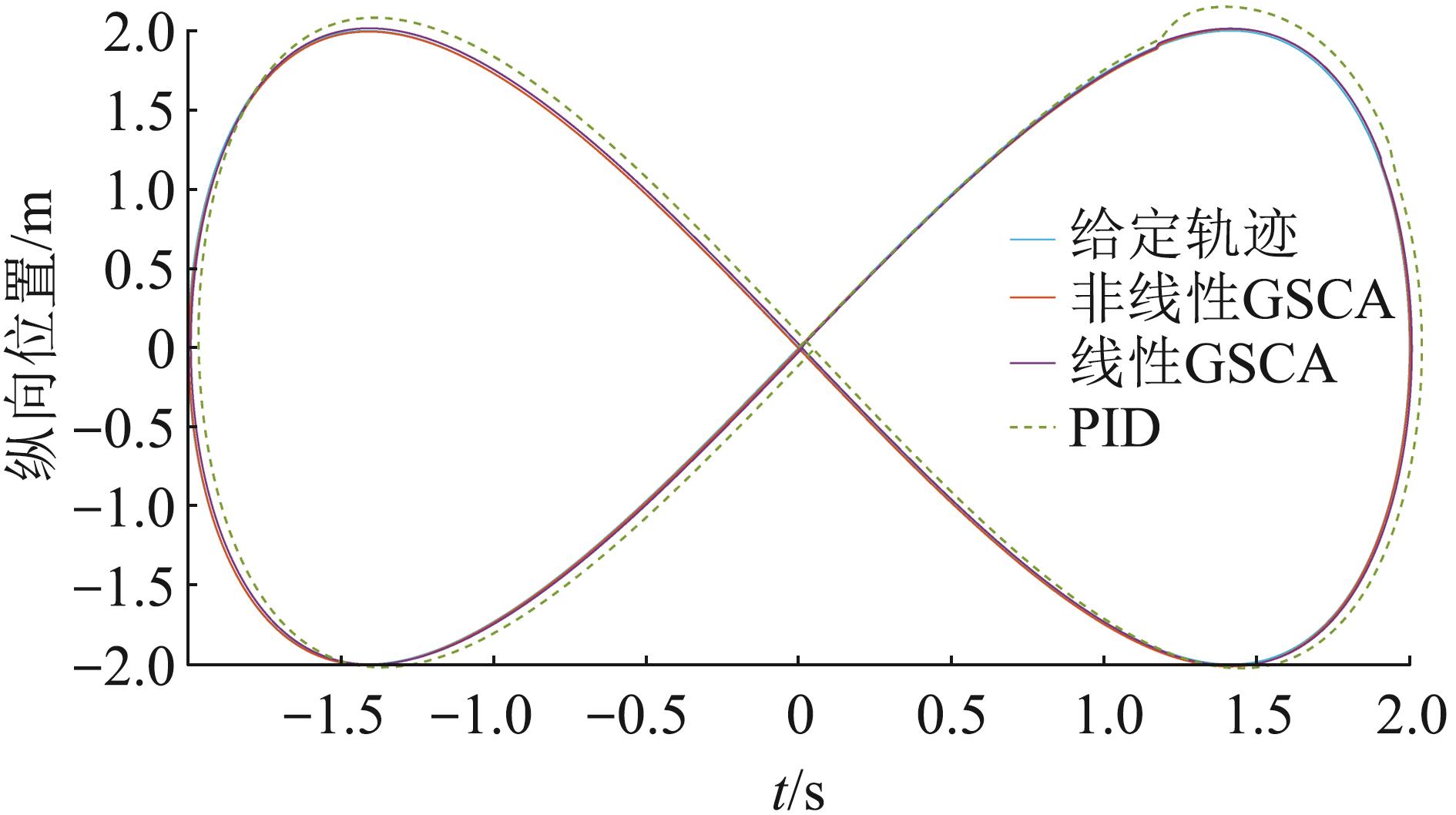
Fig. 17
Tracking error in x direction
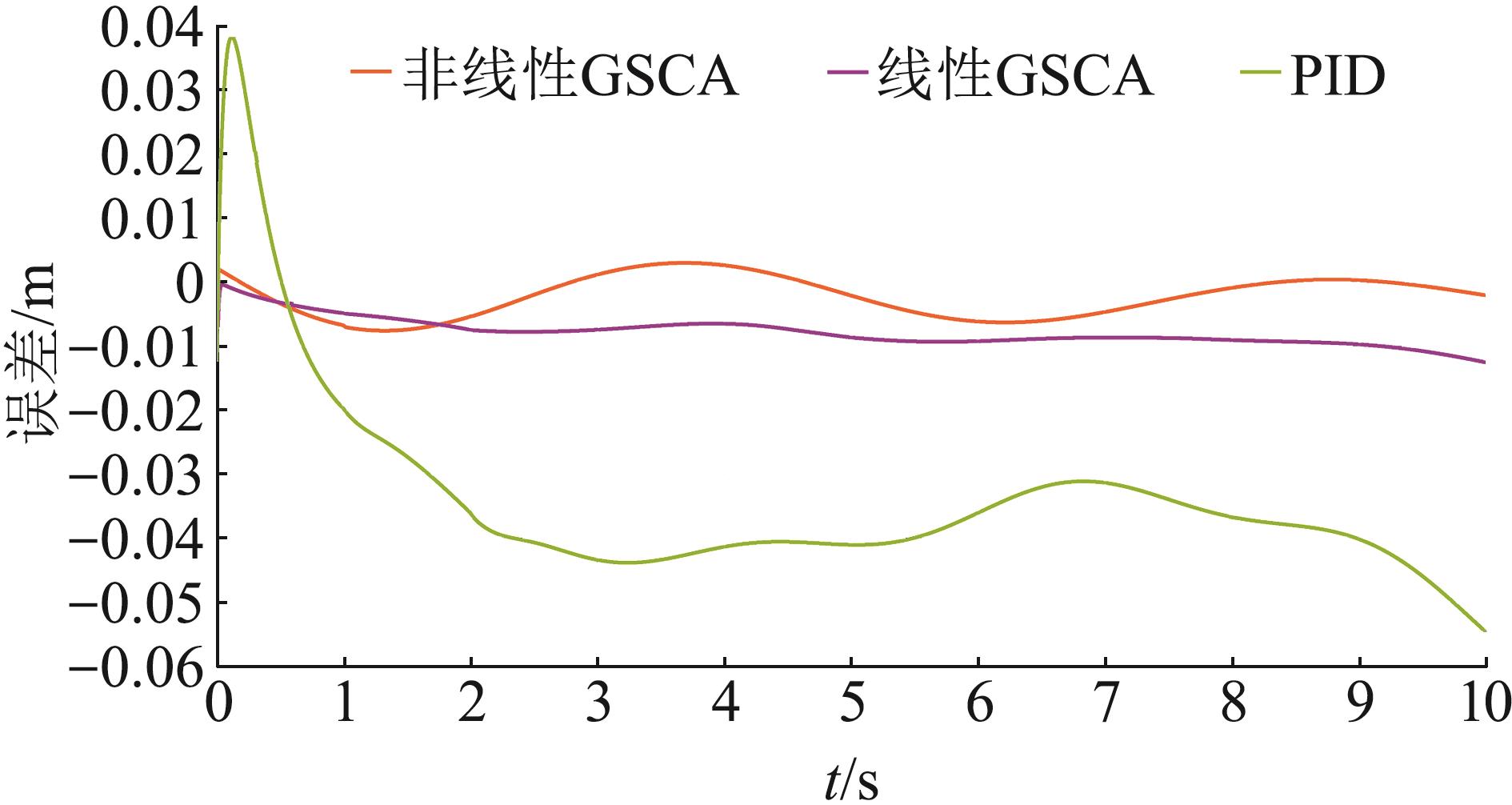
Fig. 18
Tracking error in y direction
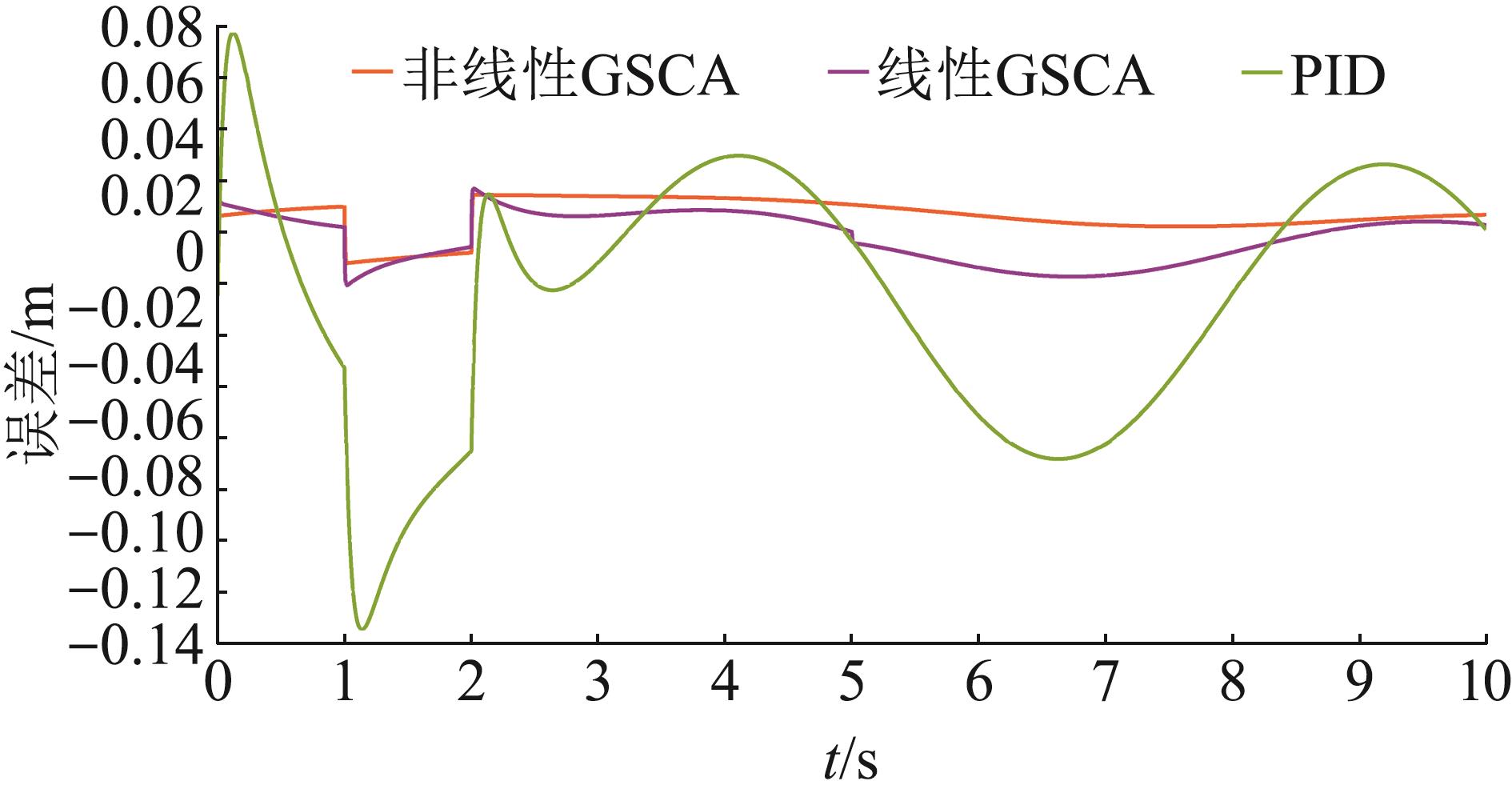
Fig. 19
Tracking error of rotation angle
| 1 | Sun Zhe, Hu Shujie, He Defeng, et al. Trajectory-tracking Control of Mecanum-wheeled Omnidirectional Mobile Robots Using Adaptive Integral Terminal Sliding Mode[J]. Computers & Electrical Engineering, 2021, 96, Part A: 107500. |
| 2 | Ren Chao, Ding Yutong, Ma Shugen, et al. Passivity-based Tracking Control of an Omnidirectional Mobile Robot Using Only One Geometrical Parameter[J]. Control Engineering Practice, 2019, 90: 160-168. |
| 3 | Sun Zhe, Hu Shujie, Xie Hao, et al. Fuzzy Adaptive Recursive Terminal Sliding Mode Control for an Agricultural Omnidirectional Mobile Robot[J]. Computers and Electrical Engineering, 2023, 105: 108529. |
| 4 | 刘东阳, 查文文, 陶亮, 等. 基于LSTM和SMC的农用履带机器人轨迹跟踪控制[J]. 系统仿真学报, 2023, 35(4): 747-759. |
| Liu Dongyang, Zha Wenwen, Tao Liang, et al. Trajectory Control of Crawler Robot Based on LSTM and SMC[J]. Journal of System Simulation, 2023, 35(4): 747-759. | |
| 5 | Lu X, Zhang X, Zhang G, et al. Neural Network Adaptive Sliding Mode Control for Omnidirectional Vehicle with Uncertainties[J]. ISA Transactions, 2019, 86: 201-214. |
| 6 | 路宏广, 赵树恩. 基于鲁棒模型预测的智能汽车轨迹跟踪控制研究[J]. 系统仿真学报, 2022, 34(1): 153-162. |
| Lu Hongguang, Zhao Shuen. Research on Intelligent Vehicle Trajectory Tracking Control Based on Robust Model Prediction[J]. Journal of System Simulation, 2022, 34(1): 153-162. | |
| 7 | Yin Hui, Chen Y H, Yu Dejie, et al. Adaptive Robust Control for a Soft Robotic Snake: A Smooth-zone Approach[J]. Applied Mathematical Modelling, 2020, 80: 454-471. |
| 8 | Kong Linghuan, Zhang Shuang, Yu Xinbo. Approximate Optimal Control for an Uncertain Robot Based on Adaptive Dynamic Programming[J]. Neurocomputing, 2021, 423: 308-317. |
| 9 | Liu Chengxiang, Zhao Zhijia, Wen Guilin. Adaptive Neural Network Control with Optimal Number of Hidden Nodes for Trajectory Tracking of Robot Manipulators[J]. Neurocomputing, 2019, 350: 136-145. |
| 10 | Reza J Harandi M, Khalilpour S A, Taghirad Hamid D, et al. Adaptive Control of Parallel Robots with Uncertain Kinematics and Dynamics[J]. Mechanical Systems and Signal Processing, 2021, 157: 107693. |
| 11 | 吴宏鑫, 胡军, 解永春. 基于特征模型的智能自适应控制[M]. 北京: 中国科学技术出版社, 2009: 12-78. |
| Wu Hongxin, Hu Jun, Xie Yongchun. Characteristic Model-based Intelligent Adaptive Control[M]. Beijing: China Science and Technology Press, 2009: 12-78. | |
| 12 | 徐李佳, 胡勇. 基于一阶特征模型的自适应跟踪控制方法[J]. 控制与决策, 2016, 31(9): 1692-1696. |
| Xu Lijia, Hu Yong. Adaptive Tracking Control Method Based on the First-order Characteristic Model[J]. Control and Decision, 2016, 31(9): 1692-1696. | |
| 13 | Chang Yafei, Jiang Tiantian, Pu Zhiqiang. Adaptive Control of Hypersonic Vehicles Based on Characteristic Models with Fuzzy Neural Network Estimators[J]. Aerospace Science and Technology, 2017, 68: 475-485. |
| 14 | 张世俊, 邢琰. 参数不确定机器人关节特征建模与自适应控制研究[J]. 载人航天, 2019, 25(5): 625-630. |
| Zhang Shijun, Xing Yan. Research on Joint Characteristics Modeling and Adaptive Control of Robot with Uncertain Parameters[J]. Manned Spaceflight, 2019, 25(5): 625-630. | |
| 15 | 吴宏鑫, 王颖, 解永春. 非线性黄金分割自适应控制[J]. 宇航学报, 2002, 23(6): 19-26. |
| Wu Hongxin, Wang Ying, Xie Yongchun. Nonlinear Golden-section Adaptive Control[J]. Journal of Astronautics, 2002, 23(6): 19-26. | |
| 16 | Yang Junchun, Hu Jun, Ni Maolin. Adaptive Guidance Law Design Based on Characteristic Model for Reentry Vehicles[J]. Science in China Series F: Information Sciences, 2008, 51(12): 2005-2021. |
| 17 | 胡军. 高超声速飞行器非线性自适应姿态控制[J]. 宇航学报, 2017, 38(12): 1281-1288. |
| Hu Jun. The Nonlinear Adaptive Attitude Control for Hypersonic Vehicle[J]. Journal of Astronautics, 2017, 38(12): 1281-1288. | |
| 18 | 吴宏鑫, 刘一武, 刘忠汉, 等. 特征建模与挠性结构的控制[J]. 中国科学E辑: 技术科学, 2001, 31(2): 137-149. |
| [1] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [2] | Huang Jie, Huang Jie. An Intelligent Tracking Control Method for Unmanned Vehicles with Time-varying Disturbances [J]. Journal of System Simulation, 2025, 37(4): 1063-1075. |
| [3] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [4] | Lu Hongguang, Zhao Shuen. Research on Intelligent Vehicle Trajectory Tracking Control Based on Robust Model Prediction [J]. Journal of System Simulation, 2022, 34(1): 153-162. |
| [5] | Leng Yao, Zhao Shuen. Explicit Model Predictive Control for Intelligent Vehicle Lateral Trajectory Tracking [J]. Journal of System Simulation, 2021, 33(5): 1177-1187. |
| [6] | Liu Keyan, Dong Weijie, Ye Xueshun, Bai Muke, Zhang Huaitian. Research on Distribution Line Identification and Simulation Based on Sequence Impedance Method [J]. Journal of System Simulation, 2020, 32(10): 1964-1971. |
| [7] | Shen Yanxia, Jin Baolong. Permanent Magnet Synchronous Motor Fuzzy Forgetting Factor Recursive Least Squares Parameter Identification [J]. Journal of System Simulation, 2018, 30(9): 3404-3410. |
| [8] | Zhong Jingliang, Gou Xiaolong, Deng Tongtian. Direct Parameter Identification Method for Steam Turbine and Its Governing System [J]. Journal of System Simulation, 2018, 30(9): 3312-3318. |
| [9] | Wu Dinghui, Huang Xu, Quan Yawei, Ji Zhicheng. Parameter Identification of Permanent Magnet Synchronous Motor Based on Mutation Coral Reef Algorithm [J]. Journal of System Simulation, 2018, 30(8): 3024-3032. |
| [10] | Ma Lixin, Lü Mengyuan. Adaptive Real-Time Tracking Control System for Ammonia Desulphurization [J]. Journal of System Simulation, 2018, 30(5): 1838-1843. |
| [11] | Chen Jinbao, Li Jie, Wang Yan, Ji Zhicheng. PMSM Parameter Identification Using Teaching-Learning-Based Optimization with Levy Flight [J]. Journal of System Simulation, 2018, 30(4): 1456-1463. |
| [12] | Wu Dinghui, Zhang Jianyu, Shen Yanxia, Ji Zhicheng. Parameter Identification for PMSM Based on Multi-innovation Approximate Least Absolute Deviation Identification Algorithm [J]. Journal of System Simulation, 2018, 30(3): 1001-1007. |
| [13] | Wang Mengqiu, Wang Yan, Ji Zhicheng. Permanent Magnet Synchronous Motor Multi-parameter Identification Based on Improved Salp Swarm Algorithm [J]. Journal of System Simulation, 2018, 30(11): 4284-4292. |
| [14] | Fan Yunsheng, Sun Xiaojie, Wang Guofeng, Guo Chen. Tracking Control Method of Autonomous Dynamic Collision Avoidance for Unmanned Surface Vehicle [J]. Journal of System Simulation, 2018, 30(10): 3781-3788. |
| [15] | Ma Fei, Wu Yunjie, Cheng Mingzhi. Non-singular Terminal Sliding Mode Control for Bank-to-Turn Missile Based on Active Disturbance Rejection Decoupling Controller [J]. Journal of System Simulation, 2017, 29(9): 2175-2181. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
