

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (4): 1063-1075.doi: 10.16182/j.issn1004731x.joss.23-1494
• Papers • Previous Articles Next Articles
Huang Jie1,2, Huang Jie1,2
Received:2023-12-07
Revised:2024-02-14
Online:2025-04-17
Published:2025-04-16
CLC Number:
Huang Jie, Huang Jie. An Intelligent Tracking Control Method for Unmanned Vehicles with Time-varying Disturbances[J]. Journal of System Simulation, 2025, 37(4): 1063-1075.
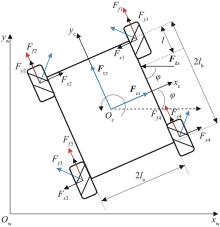
Fig. 1
Unmanned vehicle model

Fig. 2
Framework of policy iteration tracking controller

Table 1
Model parameter setting of unmanned vehicles
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 6 | 0.094 5 | ||
| 0.05 | 0.087 | ||
| 0.11 | 11.4 | ||
| 0.18 | 0.15 |
Fig. 3
Estimation errors of identifier states
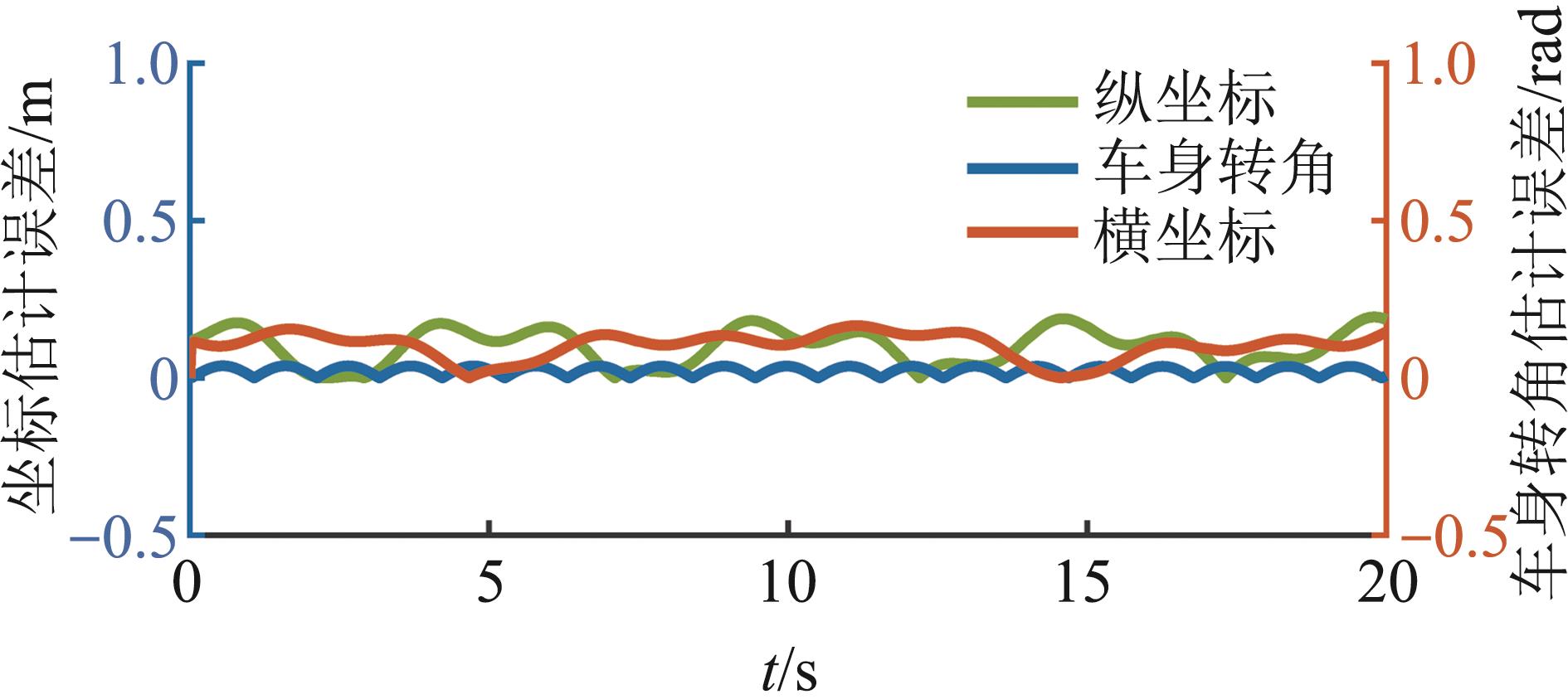
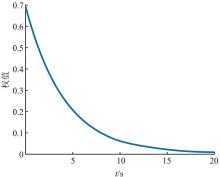
Fig. 4
Weight of identifier network
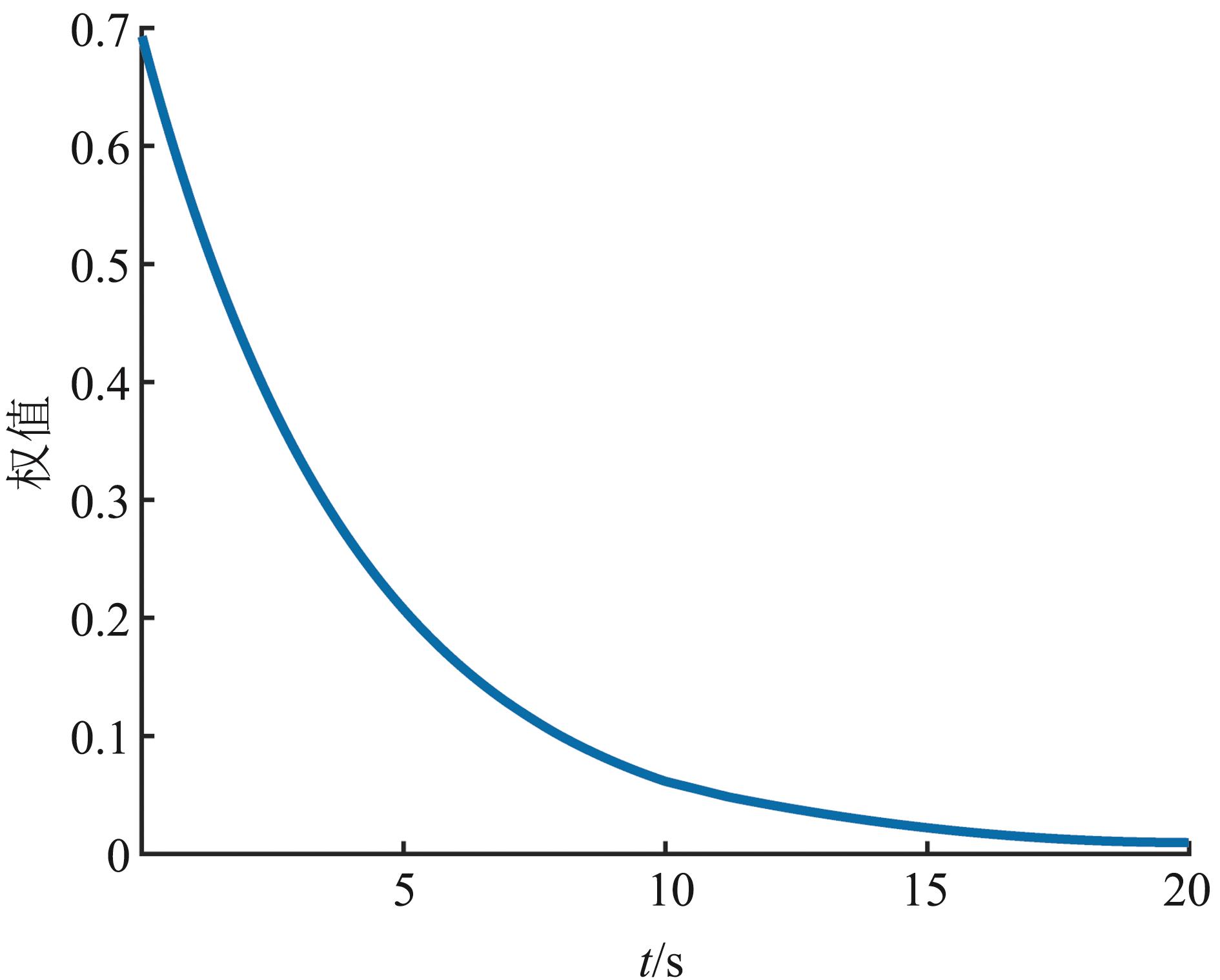
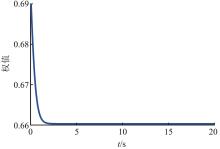
Fig. 5
Weight of actor network
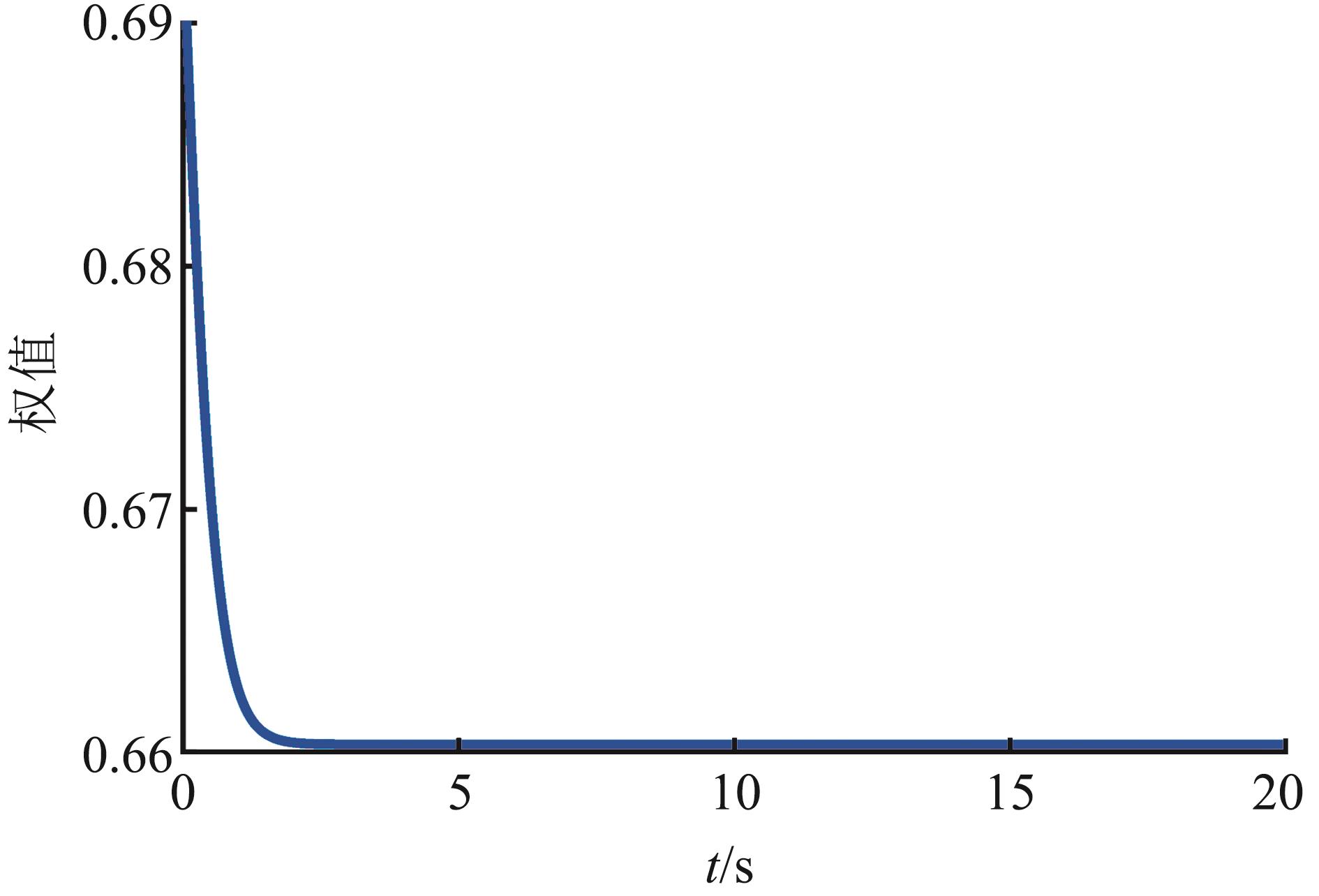
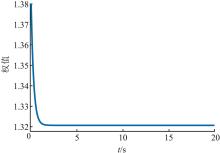
Fig. 6
Weight of critic network

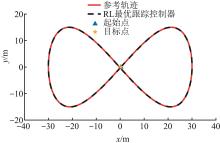
Fig. 7
Tracking result of RL tracking controller
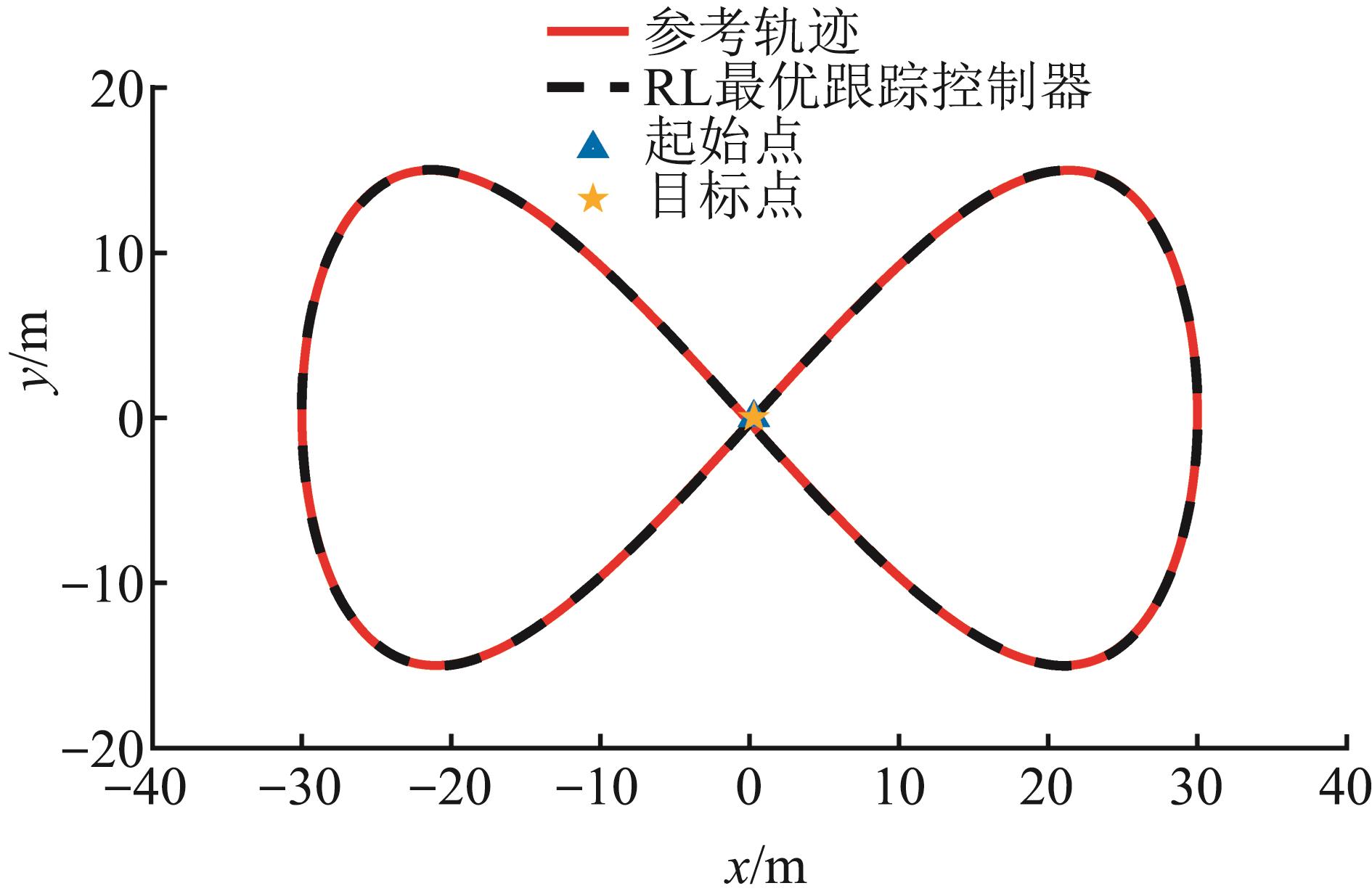
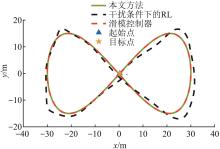
Fig. 8
Comparison of tracking results
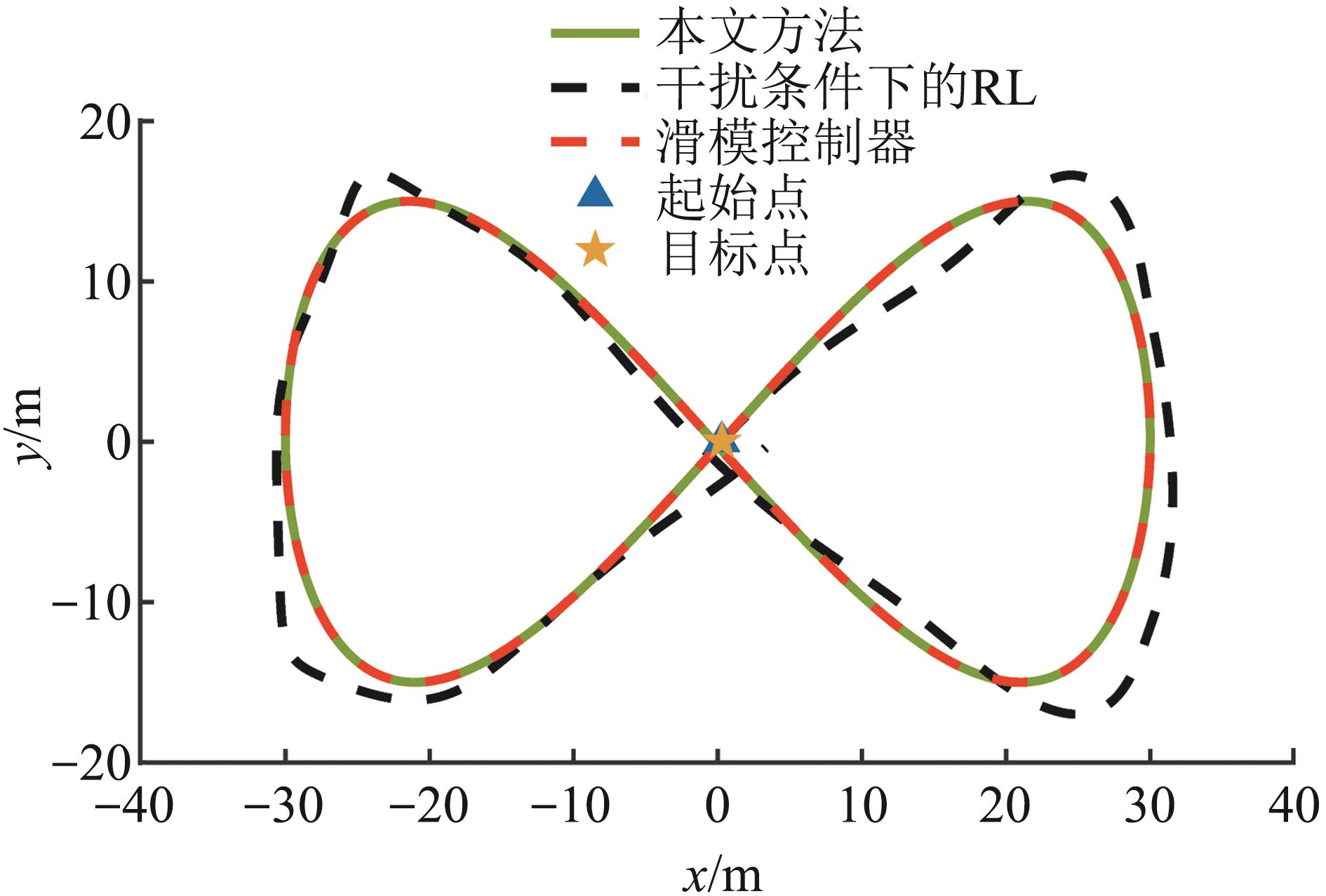
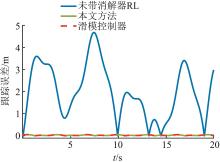
Fig. 9
Comparison of lateral tracking error
Fig. 10
Comparison of longitudinal tracking error

Table 2
Numerical comparison of tracking effect of three methods
| 指标 | 本文方法 | 滑模控制 | RL |
|---|---|---|---|
| 代价函数平均值 | 717.396 1 | 924.490 7 | 1 802.500 0 |
| 跟踪误差平均值/m | 0.033 0 | 0.054 7 | 3.467 1 |
| 代价函数最大值 | 1 432.7 | 16 781.0 | 3 918.1 |
| 跟踪误差最大值/m | 0.054 8 | 0.075 8 | 6.867 8 |
| 1 | 张国辉, 王璇, 张雅楠, 等. 实际环境中多无人车协同路径规划模型研究[J]. 系统仿真学报, 2023, 35(2): 408-422. |
| Zhang Guohui, Wang Xuan, Zhang Yanan, et al. Research on Cooperative Path Planning Model of Multiple Unmanned Vehicles in Real Environment[J]. Journal of System Simulation, 2023, 35(2): 408-422. | |
| 2 | Kakkar S, Minor M A. Fast and Reliable Motion Model for Articulated Wheeled Mobile Robots on Extremely Rough and Rocky Terrains[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2252-2259. |
| 3 | Ren Chao, Li Xiaohan, Yang Xuebo, et al. Extended State Observer-based Sliding Mode Control of an Omnidirectional Mobile Robot with Friction Compensation[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9480-9489. |
| 4 | Li Jing, Wu Qingbin, Wang Junzheng, et al. Autonomous Tracking Control for Four-wheel Independent Steering Robot Based on Improved Pure Pursuit[J]. Journal of Beijing Institute of Technology, 2020, 29(4): 466-473. |
| 5 | 张华强, 王国栋, 吕云飞, 等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报, 2020, 51(9): 18-25. |
| Zhang Huaqiqng, Wang Guodong, Yunfei Lü, et al. Agricultural Machinery Automatic Navigation Control System Based on Improved Pure Tracking Model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 18-25. | |
| 6 | 邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| Deng Haipeng, Ma Bin, Zhao Haiguang, et al. Path Planning and Tracking Control of Autonomous Vehicle for Obstacle Avoidance[J]. Acta Armamentarii, 2020, 41(3): 585-594. | |
| 7 | Kanchwala H, Ícaro Bezerra Viana, Ceccoti M, et al. Model Predictive Tracking Controller for a High Fidelity Vehicle Dynamics Model[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Piscataway: IEEE, 2019: 1496-1503. |
| 8 | 梁忠超, 张欢, 赵晶, 等. 基于自适应MPC的无人驾驶车辆轨迹跟踪控制[J]. 东北大学学报(自然科学版), 2020, 41(6): 835-840. |
| Liang Zhongchao, Zhang Huan, Zhao Jing, et al. Trajectory Tracking Control of Unmanned Vehicles Based on Adaptive MPC[J]. Journal of Northeastern University(Natural Science), 2020, 41(6): 835-840. | |
| 9 | 陈亮, 秦兆博, 孔伟伟, 等. 基于最优前轮侧偏力的智能汽车LQR横向控制[J]. 清华大学学报(自然科学版), 2021, 61(9): 906-912. |
| Chen Liang, Qin Zhaobo, Kong Weiwei, et al. Lateral Control Using LQR for Intelligent Vehicles Based on the Optimal Front-tire Lateral Force[J]. Journal of Tsinghua University(Science and Technology), 2021, 61(9): 906-912. | |
| 10 | Wen Guoxing, Chen C L, Ge Shuzhi, et al. Optimized Adaptive Nonlinear Tracking Control Using Actor-critic Reinforcement Learning Strategy[J]. IEEE Transactions on Industrial Informatics, 2019, 15(9): 4969-4977. |
| 11 | Peng Zhinan, Luo Rui, Hu Jiangping, et al. Optimal Tracking Control of Nonlinear Multiagent Systems Using Internal Reinforce Q-learning[J]. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(8): 4043-4055. |
| 12 | 谭伟, 刘景升, 祖晖, 等. 参数不确定和扰动下智能汽车路径跟踪控制[J]. 浙江大学学报(工学版), 2023, 57(4): 702-711. |
| Tan Wei, Liu Jingsheng, Zu Hui, et al. Intelligent Vehicle Path Tracking Control Under Parametric Uncertainties and External Disturbances[J]. Journal of Zhejiang University(Engineering Science), 2023, 57(4): 702-711. | |
| 13 | Modares H, Lewis F L. Linear Quadratic Tracking Control of Partially-unknown Continuous-time Systems Using Reinforcement Learning[J]. IEEE Transactions on Automatic Control, 2014, 59(11): 3051-3056. |
| 14 | Gao Weinan, Jiang Zhongping. Learning-based Adaptive Optimal Tracking Control of Strict-feedback Nonlinear Systems[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(6): 2614-2624. |
| 15 | Chen Ci, Modares H, Xie Kan, et al. Reinforcement Learning-based Adaptive Optimal Exponential Tracking Control of Linear Systems with Unknown Dynamics[J]. IEEE Transactions on Automatic Control, 2019, 64(11): 4423-4438. |
| 16 | Liu Derong, Xue Shan, Zhao Bo, et al. Adaptive Dynamic Programming for Control: A Survey and Recent Advances[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(1): 142-160. |
| 17 | Luo Rui, Peng Zhinan, Hu Jiangping, et al. Adaptive Optimal Control of Affine Nonlinear Systems via Identifier-critic Neural Network Approximation with Relaxed PE Conditions[J]. Neural Networks, 2023, 167: 588-600. |
| 18 | Jiang Yi, Gao Weinan, Wu Jin, et al. Reinforcement Learning and Cooperative H∞ Output Regulation of Linear Continuous-time Multi-agent Systems[J]. Automatica, 2023, 148: 110768. |
| 19 | Zhao Jianguo, Yang Chunyu, Gao Weinan, et al. Linear Quadratic Tracking Control of Unknown Systems: A Two-phase Reinforcement Learning Method[J]. Automatica, 2023, 148: 110761. |
| 20 | Yang Yunjie, Wan Yan, Zhu Jihong, et al. H∞ Tracking Control for Linear Discrete-time Systems: Model-free Q-learning Designs[J]. IEEE Control Systems Letters, 2021, 5(1): 175-180. |
| 21 | 于欣波, 贺威, 薛程谦, 等. 基于扰动观测器的机器人自适应神经网络跟踪控制研究[J]. 自动化学报, 2019, 45(7): 1307-1324. |
| Yu Xinbo, He Wei, Xue Chengqian, et al. Disturbance Observer-based Adaptive Neural Network Tracking Control for Robots[J]. Acta Automatica Sinica, 2019, 45(7): 1307-1324. | |
| 22 | Wang Hongbo, Hu Chenglei, Zhou Juntao, et al. Path Tracking Control of an Autonomous Vehicle with Model-free Adaptive Dynamic Programming and RBF Neural Network Disturbance Compensation[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(5): 825-841. |
| 23 | Ma Qingwen, Zhang Xinglong, Xu Xin, et al. Self-learning Sliding Mode Control Based on Adaptive Dynamic Programming for Nonholonomic Mobile Robots[J]. ISA Transactions, 2023, 142: 136-147. |
| 24 | Alakshendra Veer, Chiddarwar Shital S. A Robust Adaptive Control of Mecanum Wheel Mobile Robot: Simulation and Experimental Validation[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2016: 5606-5611. |
| 25 | Wen Guoxing, Chen C L, Li Bin. Optimized Formation Control Using Simplified Reinforcement Learning for a Class of Multiagent Systems with Unknown Dynamics[J]. IEEE Transactions on Industrial Electronics, 2020, 67(9): 7879-7888. |
| 26 | 吴克坚, 刘烁, 徐清华, 等. 应用Cauchy-schwarz不等式证明积分不等式举例[J]. 高等数学研究, 2021, 24(2): 13-15, 54. |
| Wu Kejian, Liu Shuo, Xu Qinghua, et al. Using Cauchy-schwarz Inequality to Prove Integral Inequalities[J]. Studies in College Mathematics, 2021, 24(2): 13-15, 54. | |
| 27 | 王永军, 郑丽. 关于Young不等式和Schwarz不等式的证明[J]. 数学学习与研究, 2020(26): 145-147. |
| [1] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [2] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [3] | Cheng Lei, Wang Haoyou, Chen Xinjie. Adaptive Tracking Control for Omnidirectional Vehicle Based on Characteristic Modeling [J]. Journal of System Simulation, 2024, 36(10): 2277-2287. |
| [4] | Guohui Zhang, Xuan Wang, Yanan Zhang, Ang Gao. Research on Cooperative Path Planning Model of Multiple Unmanned Vehicles in Real Environment [J]. Journal of System Simulation, 2023, 35(2): 408-422. |
| [5] | Lu Hongguang, Zhao Shuen. Research on Intelligent Vehicle Trajectory Tracking Control Based on Robust Model Prediction [J]. Journal of System Simulation, 2022, 34(1): 153-162. |
| [6] | Leng Yao, Zhao Shuen. Explicit Model Predictive Control for Intelligent Vehicle Lateral Trajectory Tracking [J]. Journal of System Simulation, 2021, 33(5): 1177-1187. |
| [7] | Ma Lixin, Lü Mengyuan. Adaptive Real-Time Tracking Control System for Ammonia Desulphurization [J]. Journal of System Simulation, 2018, 30(5): 1838-1843. |
| [8] | Fan Yunsheng, Sun Xiaojie, Wang Guofeng, Guo Chen. Tracking Control Method of Autonomous Dynamic Collision Avoidance for Unmanned Surface Vehicle [J]. Journal of System Simulation, 2018, 30(10): 3781-3788. |
| [9] | Ma Fei, Wu Yunjie, Cheng Mingzhi. Non-singular Terminal Sliding Mode Control for Bank-to-Turn Missile Based on Active Disturbance Rejection Decoupling Controller [J]. Journal of System Simulation, 2017, 29(9): 2175-2181. |
| [10] | Wang Yunjian, Liu Xiaoyun, Zhang Rongzhi, Xue Nana. State Feedback Control of Hybrid Active Power Filter [J]. Journal of System Simulation, 2017, 29(6): 1284-1289. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
