

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (4): 747-759.doi: 10.16182/j.issn1004731x.joss.21-1248
• Papers • Previous Articles Next Articles
Dongyang Liu( ), Wenwen Zha, Liang Tao, Cheng Zhu, Lichuan Gu, Jun Jiao()
), Wenwen Zha, Liang Tao, Cheng Zhu, Lichuan Gu, Jun Jiao()
Received:2021-12-06
Revised:2022-01-22
Online:2023-04-29
Published:2023-04-12
Contact:
Jun Jiao
E-mail:1250929438@qq.com;jiaojun2000@sina.com
CLC Number:
Dongyang Liu, Wenwen Zha, Liang Tao, Cheng Zhu, Lichuan Gu, Jun Jiao. Trajectory Control of Crawler Robot Based on LSTM and SMC[J]. Journal of System Simulation, 2023, 35(4): 747-759.
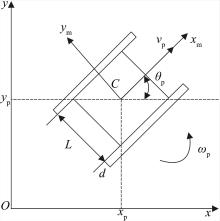
Fig. 1
Kinematics model of crawler mobile robot
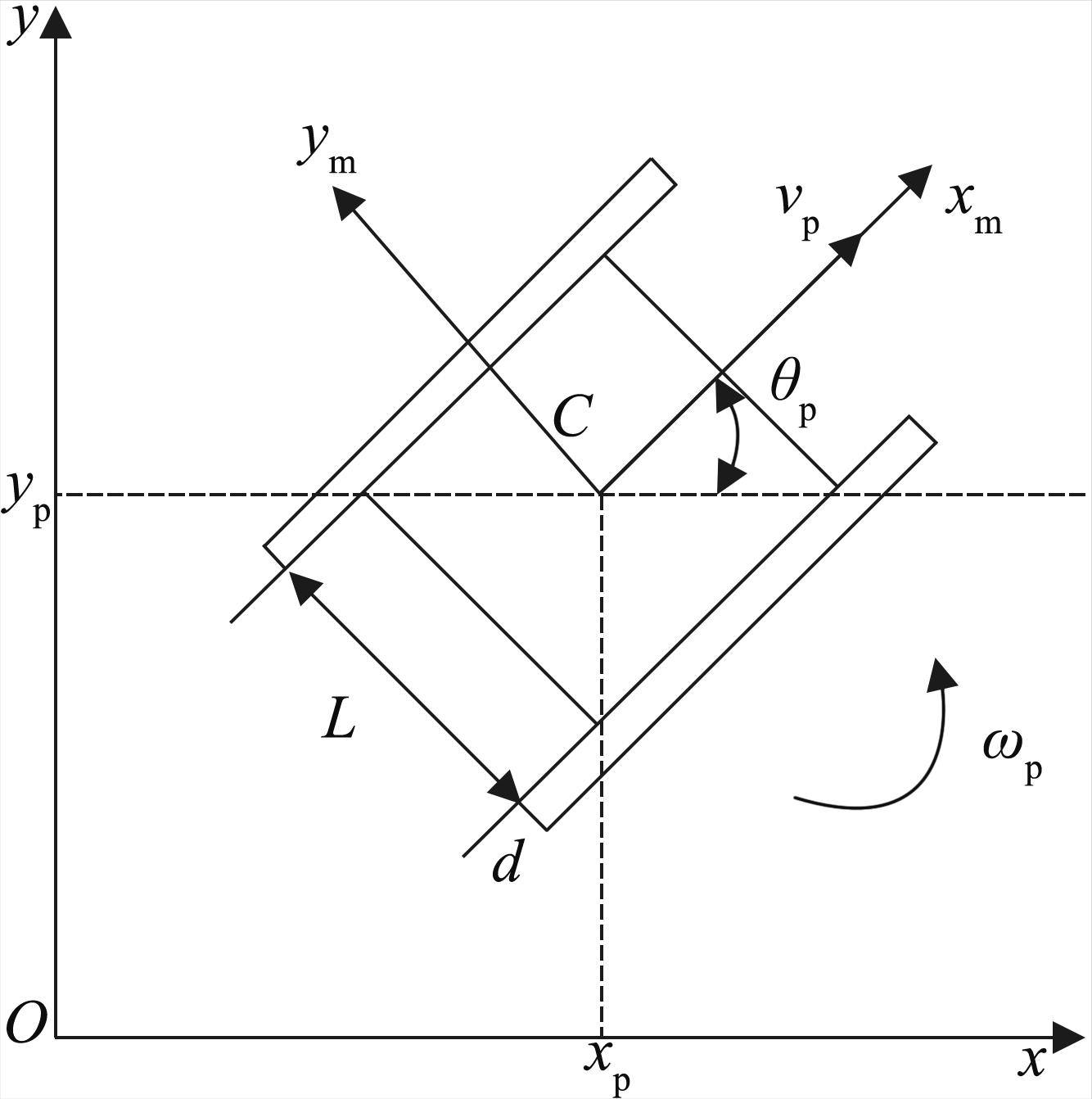
Fig. 2
Trajectory tracking error model
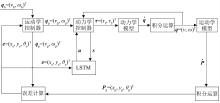
Fig. 3
Controller structure combining LSTM and SMC
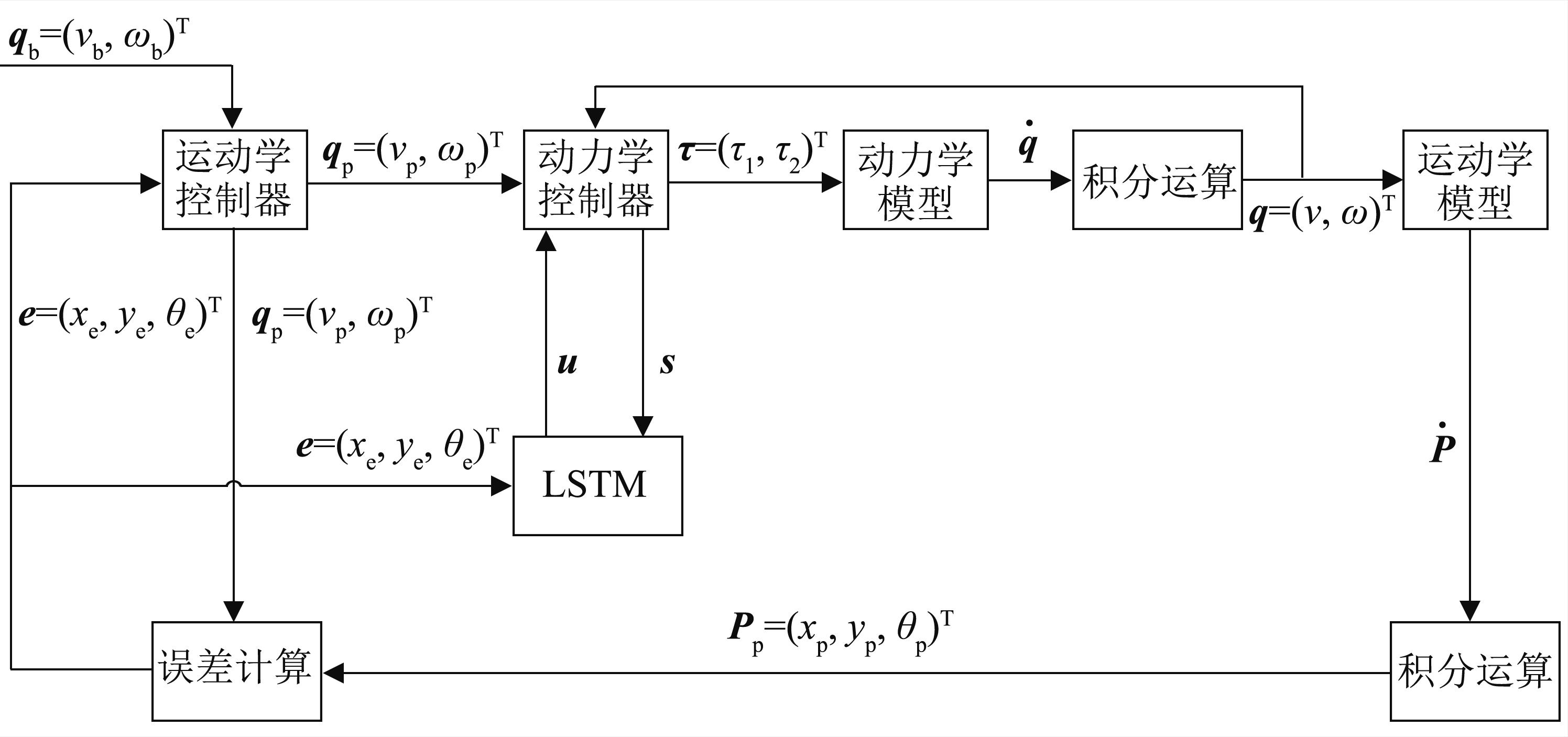
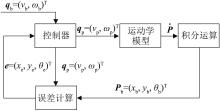
Fig. 4
Control structure diagram based on kinematics model
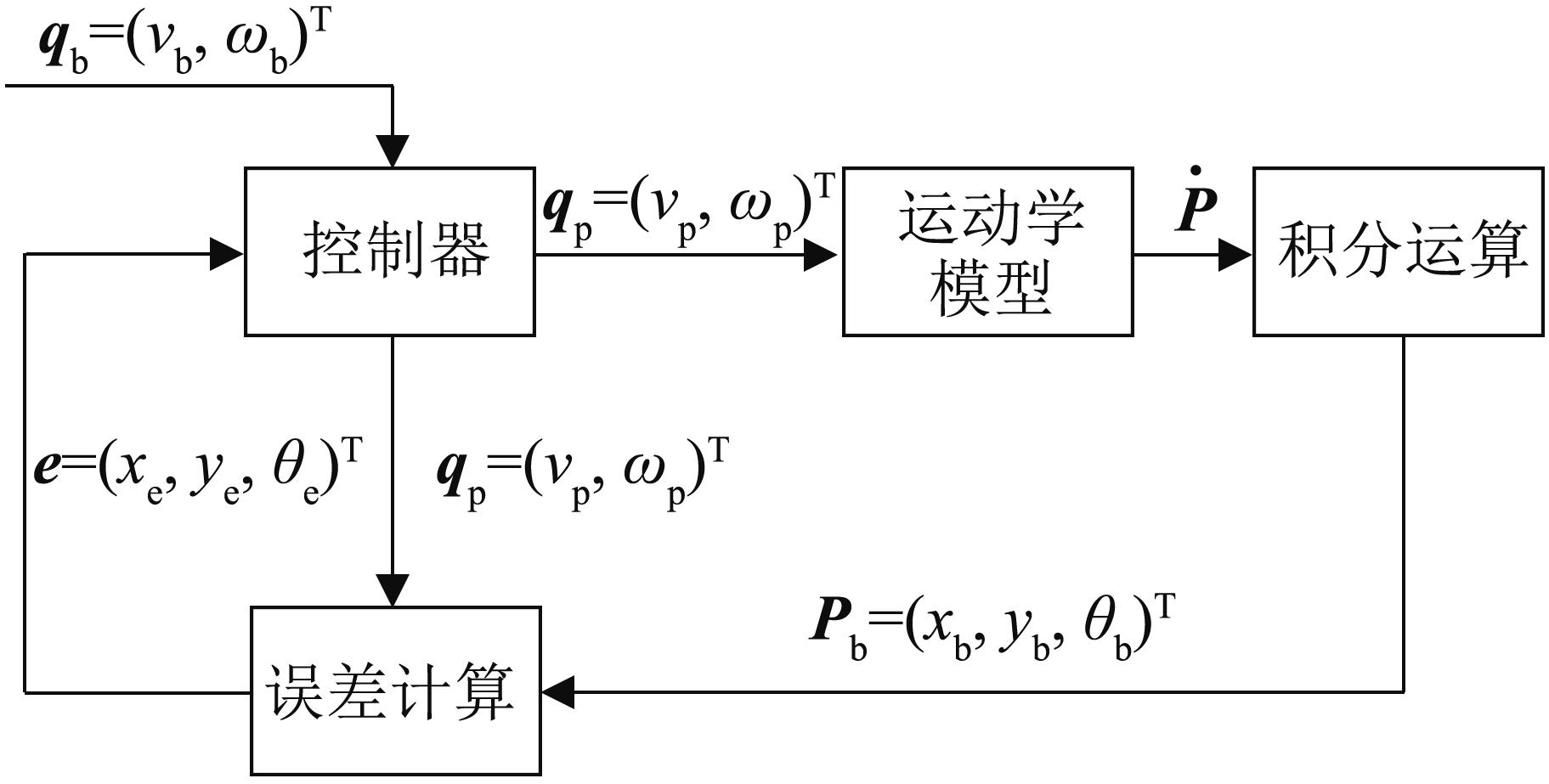
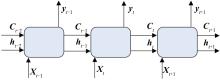
Fig. 5
LSTM network
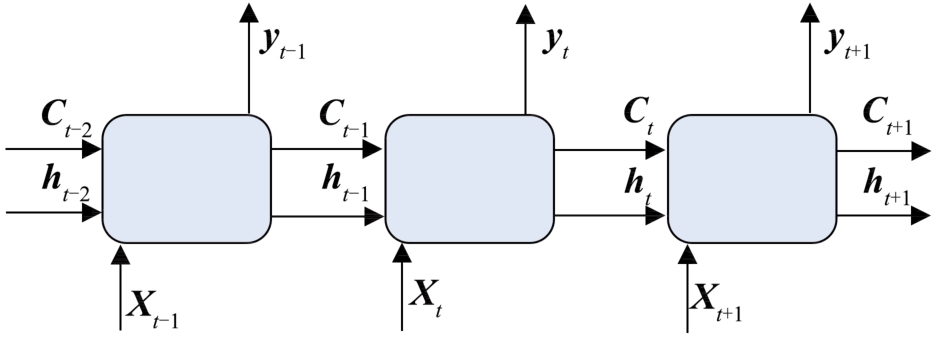
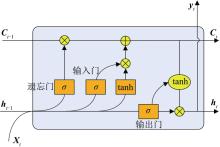
Fig. 6
Internal structure of LSTM unit
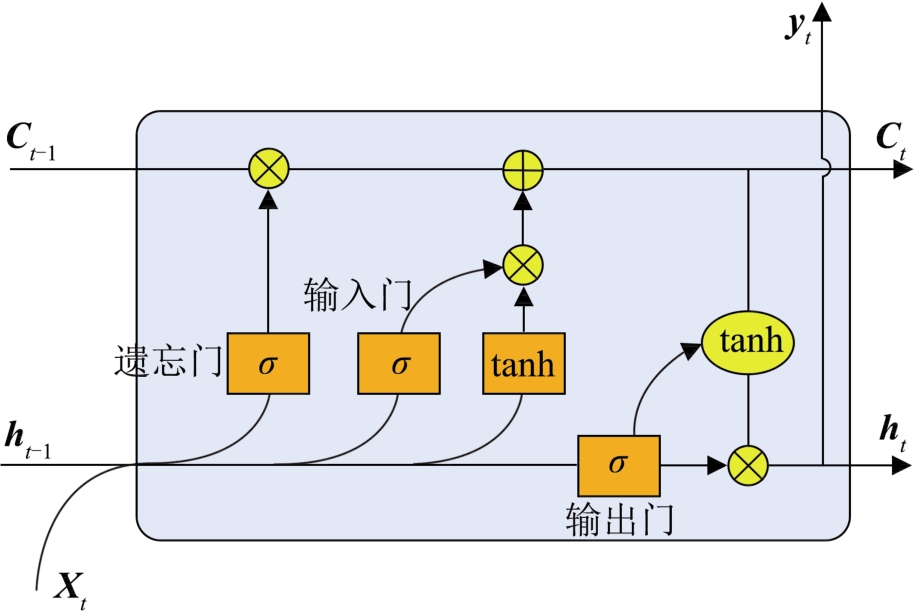
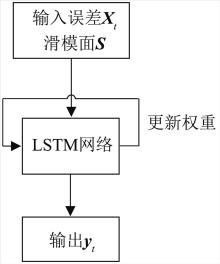
Fig. 7
LSTM training process
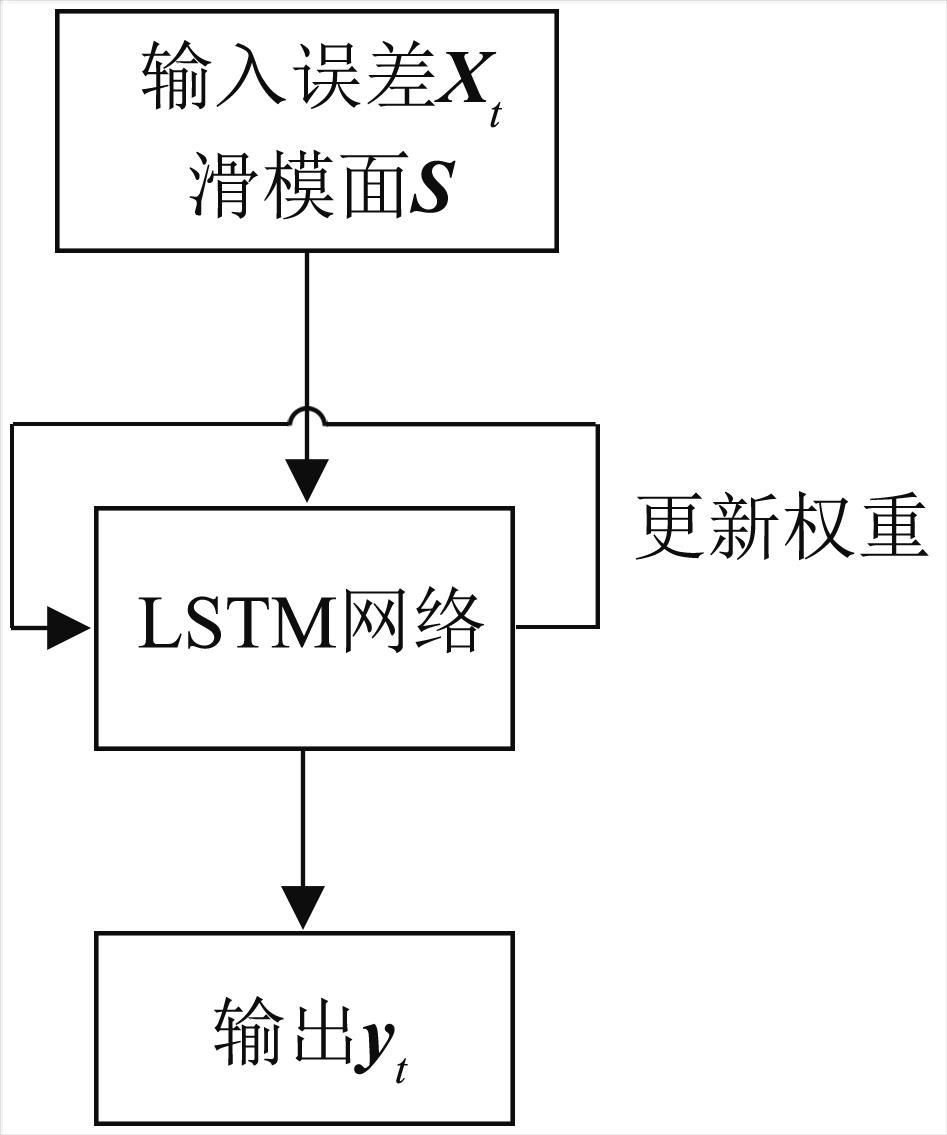
Table 1
Robot state parameters for straight trajectory
| 主要参数 | 量值 |
|---|---|
| 质量/kg | 200 |
| 转动惯量/( kg·m2) | 0.5 |
| 参考速度/(m/s) | 0.5 |
| 参考角速度/(rad/s) | 0 |
| 起始速度/(m/s) | 0 |
| 起始角速度/(rad/s) | 0 |
Table 2
Comparison of simulation results of straight trajectory
| 控制方法 | 最大跟踪偏差 | 平均绝对偏差 |
|---|---|---|
| SMC | 0.104 | 0.025 |
| SMC-LSTM | 0.069 | 0.018 |

Fig. 8
Simulation results of straight trajectory based on LSTM and SMC controller
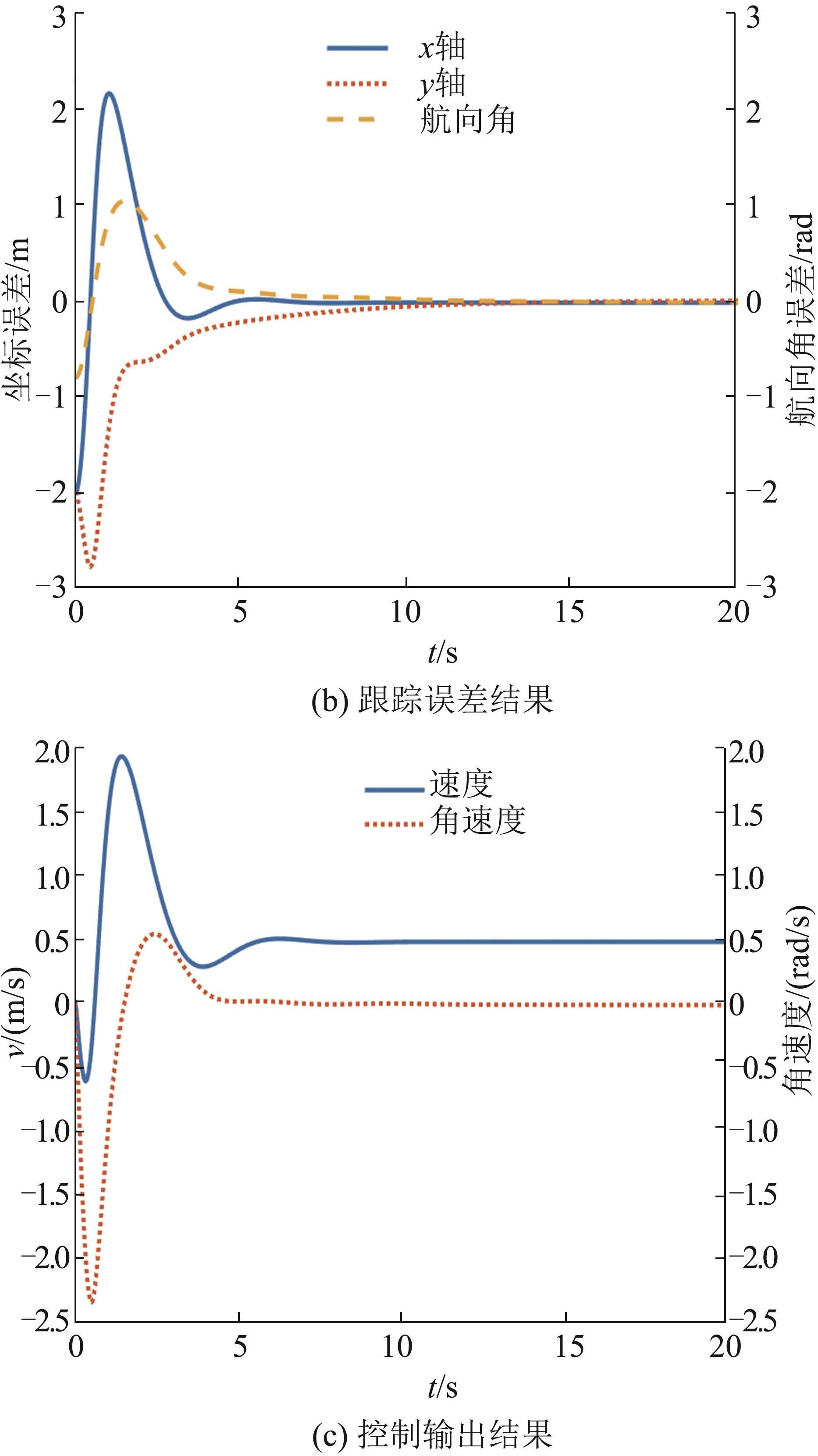
Fig. 9
Simulation results of straight trajectory based on SMC controller
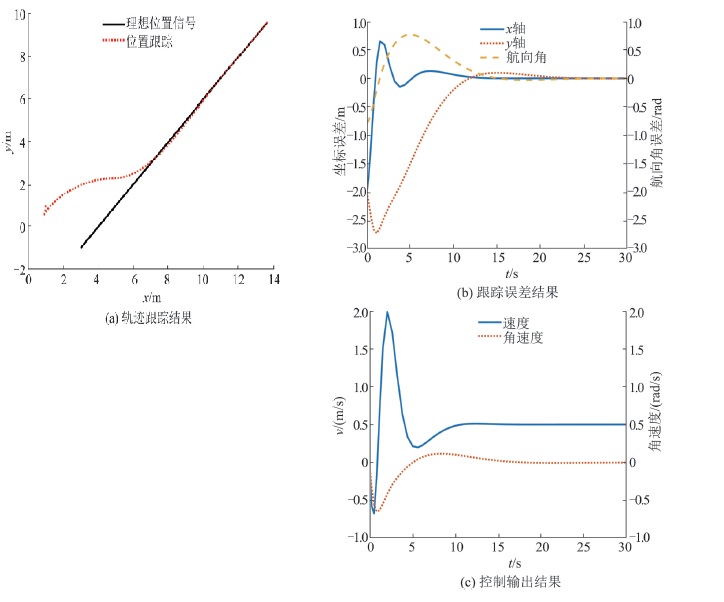
Table 3
Robot state parameters for circular trajectories
| 主要参数 | 量值 |
|---|---|
| 质量/kg | 200 |
| 转动惯量/(kg·m2) | 0.5 |
| 参考速度/(m/s) | 1 |
| 参考角速度/(rad/s) | 0.25 |
| 起始速度/(m/s) | 0 |
| 起始角速度/(rad/s) | 0 |
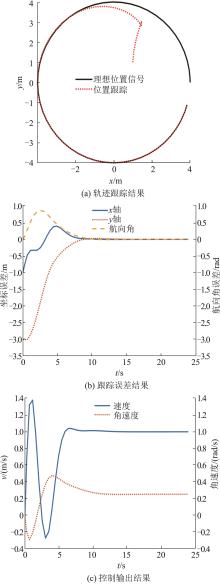
Fig. 10
Simulation results of circular trajectory based on LSTM and SMC controller
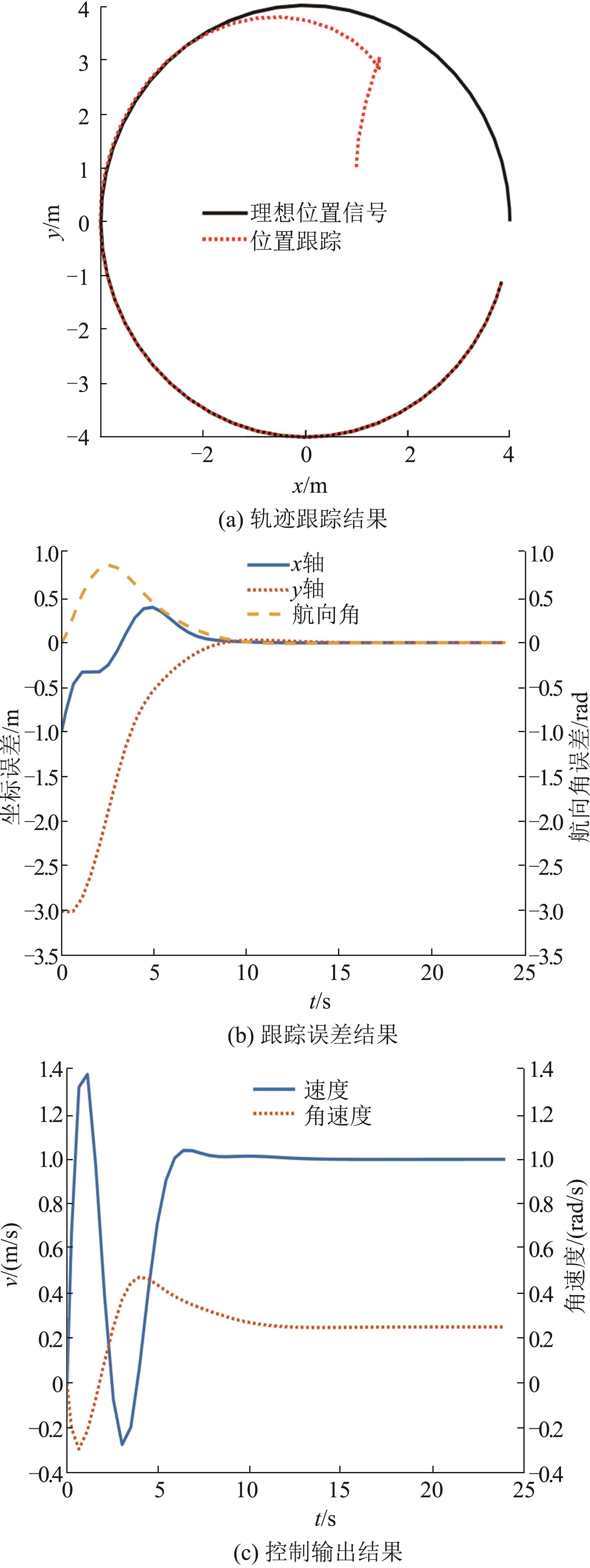
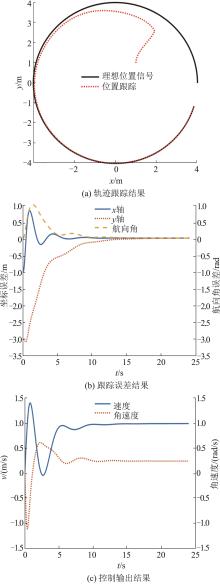
Fig. 11
Simulation results of circular trajectory based on SMC controller
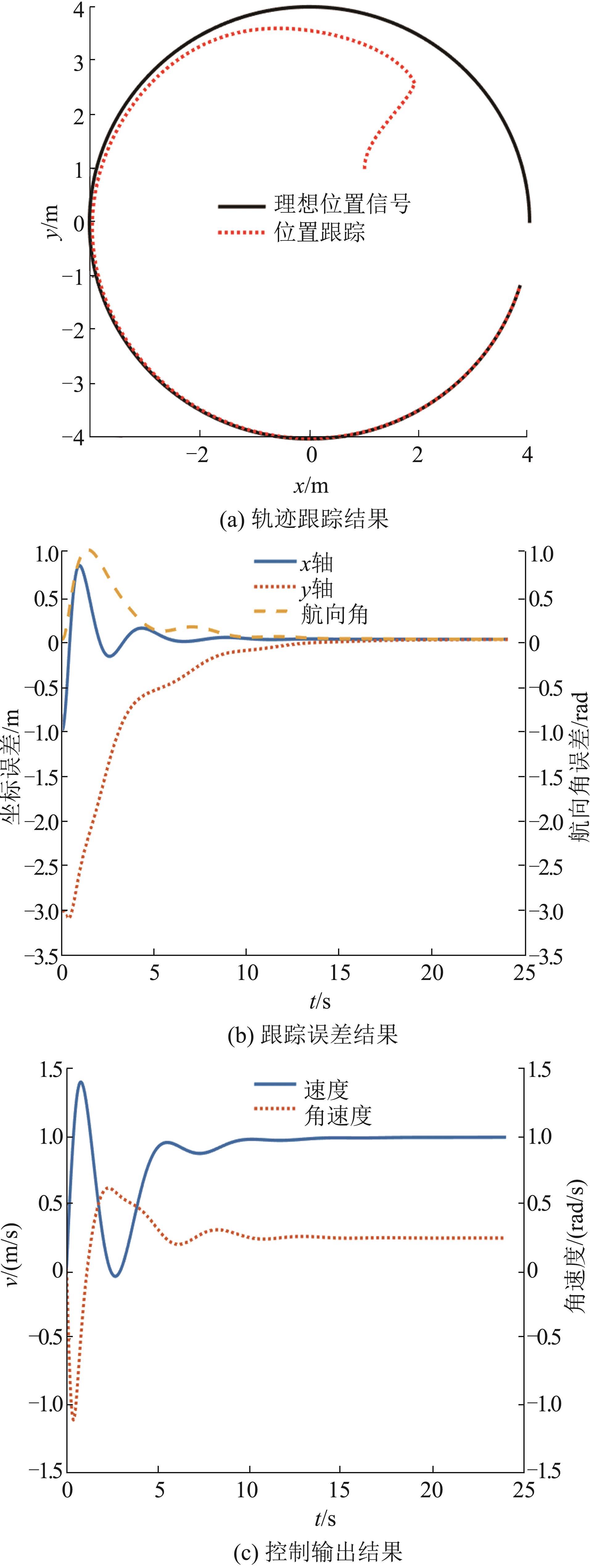
Table 4
Comparison of simulation results of circular trajectories
| 控制方法 | 最大跟踪偏差 | 平均绝对偏差 |
|---|---|---|
| SMC | 0.112 | 0.034 |
| SMC-LSTM | 0.074 | 0.026 |
Table 5
Robot state parameters for polyline trajectory
| 主要参数 | 量值 |
|---|---|
| 质量/kg | 200 |
| 转动惯量/( kg·m2) | 0.5 |
| 参考速度/(m/s) | 0.5 |
| 参考角速度(折点处)/(rad/s) | 0.33π |
| 起始速度/(m/s) | 0 |
| 起始角速度/(rad/s) | 0 |
Fig. 12
Simulation results of polyline trajectory based on LSTM and SMC controller
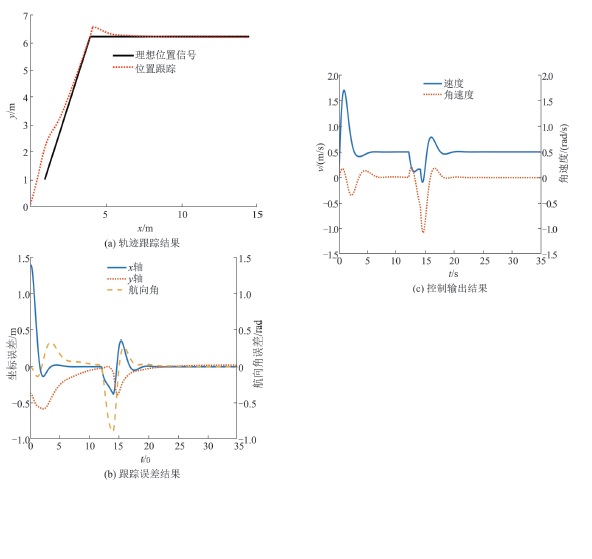
Fig. 13
Simulation results of polyline trajectory based on SMC controller
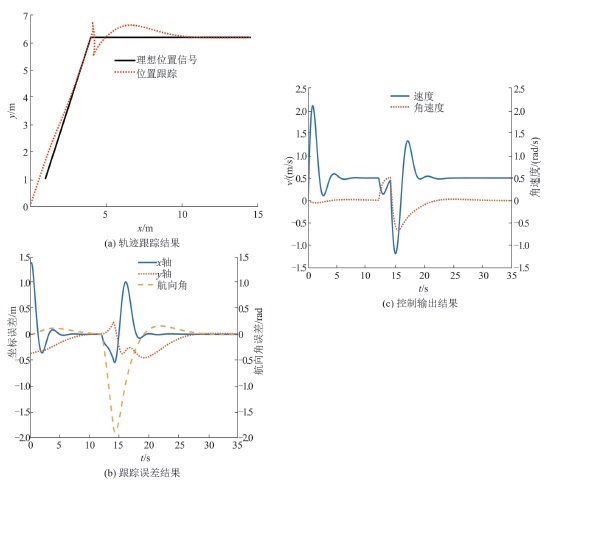
Table 6
Comparison of simulation results of polyline trajectory
| 控制方法 | 最大跟踪偏差 | 平均绝对偏差 |
|---|---|---|
| SMC | 1.056 | 0.187 |
| SMC-LSTM | 0.460 | 0.086 |
| 1 | 卞永明, 杨濛, 刘宇超, 等. 履带式移动机器人轨迹跟踪控制技术研究[J]. 中国工程机械学报, 2018, 16(3): 189-193, 206. |
| Bian Yongming, Yang Meng, Liu Yuchao, et al. Research on Tracking Control Technology of Crawler Mobile Robot[J]. Chinese Journal of Construction Machinery, 2018, 16(3): 189-193, 206. | |
| 2 | 张华强, 王国栋, 吕云飞, 等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报, 2020, 51(9): 18-25. |
| Zhang Huaqiang, Wang Guodong, Yunfei Lü, et al. Research on Agricultural Machinery Path Tracking Algorithm Based on Improved Pure Tracking Model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 18-25. | |
| 3 | 张朝宇, 董万静, 熊子庆, 等. 履带式油菜播种机模糊自适应纯追踪控制器设计与试验[J]. 农业机械学报, 2021, 52(12): 105-114. |
| Zhang Chaoyu, Dong Wanjing, Xiong Ziqing, et al. Design and Experiment of Fuzzy Adaptive Pure Pursuit Control of Crawler-type Rape Seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(12): 105-114. | |
| 4 | 杨福威, 孟红, 朱强. 基于模型预测控制的履带式无人平台轨迹跟踪控制算法研究[J]. 舰船电子工程, 2018, 38(3): 44-50. |
| Yang Fuwei, Meng Hong, Zhu Qiang. Research on Tracking Control Algorithm of Tracked Unmanned Platform Based on Model Predictive Control[J]. Ship Electronic Engineering, 2018, 38(3): 44-50. | |
| 5 | 张志达, 郑玲, 张紫薇, 等. 基于自适应模型预测的智能汽车横向轨迹跟踪控制[J]. 中国公路学报, 2022, 35(7): 305-316. |
| Zhang Zhida, Zheng Ling, Zhang Ziwei, et al. Lateral Trajectory Tracking Control of Intelligent Vehicles Based on Adaptive Model Prediction[J]. China Journal of Highway and Transport, 2022, 35(7): 305-316. | |
| 6 | 冯浩, 殷晨波, 曹东辉, 等. 挖掘机器人伺服系统神经网络滑模控制[J]. 液压与气动, 2021, 45(10): 104-110. |
| Feng Hao, Yin Chenbo, Cao Donghui, et al. Neural Network Sliding Mode Control of Excavating Robot Servo System[J]. Chinese Hydraulics & Pneumatics, 2021, 45(10): 104-110. | |
| 7 | 范其明, 吕书豪. 移动机器人的自适应神经网络滑模控制[J]. 控制工程, 2017, 24(7): 1409-1414. |
| Fan Qiming, Shuhao Lü. Adaptive Neural Network Sliding Mode Control of Mobile Robot[J]. Control Engineering of China, 2017, 24(7): 1409-1414. | |
| 8 | 许洋洋, 王莹, 薛东彬. 采用改进模糊神经网络PID控制的移动机器人运动误差研究[J]. 中国工程机械学报, 2019, 17(6): 510-514. |
| Xu Yangyang, Wang Ying, Xue Dongbin. Research on Motion Error of Mobile Robot Using Improved Fuzzy Neural Network PID Control[J]. Chinese Journal of Engineering Machinery, 2019, 17(6): 510-514. | |
| 9 | 匡文龙, 沈文龙, 姬长英, 等. 农用履带机器人轨迹跟踪控制系统设计与试验[J]. 东北农业大学学报, 2020, 51(4): 78-87. |
| Kuang Wenlong, Shen Wenlong, Ji Changying, et al. Design and Experiment of Track Tracking Control System for Agricultural Crawler Robot[J]. Journal of Northeast Agricultural University, 2020, 51(4): 78-87. | |
| 10 | 焦俊, 孔文, 王强, 等. 基于输入模糊化的农用履带机器人自适应滑模控制[J]. 农业机械学报, 2015, 46(6): 14-19, 13. |
| Jiao Jun, Kong Wen, Wang Qiang, et al. Self-adaptive Sliding Mode Control Based on Input Fuzzy for Agricultural Tracked Robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(6): 14-19, 13. | |
| 11 | 焦俊, 陈靖, 乔焰, 等. 直流电机驱动农用履带机器人轨迹跟踪自适应滑模控制[J]. 农业工程学报, 2018, 34(4): 64-70. |
| Jiao Jun, Chen Jing, Qiao Yan, et al. Adaptive Sliding Mode Control of Trajectory Tracking Based on DC Motor Drive for Agricultural Tracked Robot[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(4): 64-70. | |
| 12 | Zheng Kunming, Hu Youmin, Wu Bo. Intelligent Fuzzy Sliding Mode Control for Complex Robot System with Disturbances[J]. European Journal of Control(S0947-3580), 2020, 51: 95-109. |
| 13 | Yao Xuan, Chen Zhaobo. Sliding Mode Control with Deep Learning Method for Rotor Trajectory Control of Active Magnetic Bearing System[J]. Transactions of the Institute of Measurement and Control(S0142-3312), 2019, 41(5): 1383-1394. |
| 14 | Zhou Minghao, Feng Yong, Xue Chen, et al. Deep Convolutional Neural Network Based Fractional-Order Terminal Sliding-Mode Control for Robotic Manipulators[J]. Neurocomputing(S0925-2312), 2020, 416(27): 143-151. |
| 15 | Hassrizal H B, Rossiter J, Othman S M, et al. Particle Swarm Algorithm Sliding Mode Control on Spacecraft's Attitude with Switching Function Method Thorough Error Feedback[C]//IOP Conference Series: Materials Science and Engineering. IOP Publishing, 2019, 705(1): 012039. |
| 16 | Nguyen C T, Duong T L, Duong M Q, et al. Chattering-Free Single-Phase Robustness Sliding Mode Controller for Mismatched Uncertain Interconnected Systems with Unknown Time-Varying Delays[J]. Energies(S1996-1073), 2020, 13(1): 282. |
| 17 | 于广宇, 董学平, 王祥民, 等. 弹性网下基于LSTM的分解炉出口温度预测[J]. 系统仿真学报, 2021, 33(5): 1078-1085. DOI:10.16182/j.issn1004731x.joss.20-0012 . |
| Yu Guangyu, Dong Xueping, Wang Xiangmin, et al. Decomposition Furnace Outlet Temperature Prediction Based on ElasticNet and LSTM[J]. Journal of System Simulation, 2021, 33(5): 1078-1085. DOI:10.16182/j.issn1004731x.joss.20-0012 . | |
| 18 | 魏腾飞, 潘庭龙. 基于改进PSO优化LSTM网络的短期电力负荷预测[J]. 系统仿真学报, 2021, 33(8): 1866-1874. DOI:10.16182/j.issn1004731x.joss.20-0297 . |
| Wei Tengfei, Pan Tinglong. Short-term Power Load Forecasting Based on LSTM Neural Network Optimized by Improved PSO[J]. Journal of System Simulation, 2021, 33(8): 1866-1874. DOI:10.16182/j.issn1004731x.joss.20-0297 . | |
| 19 | 孟小凡, 宋华. 基于神经网络的卫星姿控系统故障预测 [J].系统仿真学报, 2019, 31(11): 2499-2508. DOI:10.16182/j.issn1004731x.joss.19-FZ0351E . |
| Meng Xiaofan, Song Hua. Satellite Attitude Control System Failure Prediction Based on Neural Network[J]. Journal of System Simulation, 2019, 31(11): 2499-2508. DOI:10.16182/j.issn1004731x.joss.19-FZ0351E . | |
| 20 | Iossaqui J G, Camino J F, Zampieri D E. A Nonlinear Control Design for Tracked Robots with Longitudinal Slip-ScienceDirect[J]. IFAC Proceedings Volumes(S2405-8963), 2011, 44(1): 5932-5937. |
| [1] | Li Qiuni, Wang Dong, Wang Chaozhe, Liu Zongcheng. A BiLSTM+Attention Method for Predicting the Intentions of Air Combat Targets Based on Multi-feature Continuous Time Series [J]. Journal of System Simulation, 2026, 38(4): 948-958. |
| [2] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [3] | Fan Zeng, He Mingjun, Xing Xiangyu. Research on Digital Simulation Method for Cognitive Load Evaluation of pilots [J]. Journal of System Simulation, 2025, 37(8): 1921-1932. |
| [4] | Chen Tao, Liu Jianxuan, Wang Lizhong, Zou Xiangjun, Li Xiaojuan. Research on Non-singular Fast Integral Terminal Sliding Mode Trajectory Tracking Control of Six-axis Robotic Arm [J]. Journal of System Simulation, 2025, 37(8): 2115-2123. |
| [5] | Chen Kun, Chen Liang, Xie Jiming, Liu Fengbo, Chen Taixiong, Wei Lukuan. Simulation Study on Adaptive Signal Control of Deformed Intersection Based on LSTM-GNN [J]. Journal of System Simulation, 2025, 37(6): 1343-1351. |
| [6] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [7] | Lu Xinbiao, Ye Chunlin, Chen Yisen, Wu Wen, Chen Yudan. A Transfer Learning-based Hybrid Model for PM2.5Concentration Prediction [J]. Journal of System Simulation, 2025, 37(4): 882-894. |
| [8] | Tang Jinlin, Wang Yan, Liu Xiang, Wang Tuanjie, Ji Zhicheng. Boolean Network Model Optimization Based on Neural Network and Genetic Programming [J]. Journal of System Simulation, 2025, 37(11): 2812-2825. |
| [9] | Ma Yun, Wang Yuan, Li Meng, Wang Peng, Tang Yanling. Robust Predictive Control of Nonplanar Fully-actuated UAVs [J]. Journal of System Simulation, 2024, 36(2): 415-422. |
| [10] | Chen Jing, Zhang Zhaochong, Wang Linkai, An Mai, Wang Wei. Short-term Bus Passenger Flow Prediction Based on Convolutional Long-short-term Memory Network [J]. Journal of System Simulation, 2024, 36(2): 476-486. |
| [11] | Jing Yang, Minghua Lu, Xingchen Hu, Jinping Wu. An Approach to Solving the Incoming Target Based on Uncertain Time Series [J]. Journal of System Simulation, 2023, 35(6): 1245-1259. |
| [12] | Songming Jiao, Hui Ding, Yufei Zhong, Xin Yao, Jiahao Zheng. A UAV Target Tracking and Control Algorithm Based on SiamRPN [J]. Journal of System Simulation, 2023, 35(6): 1372-1380. |
| [13] | Bisheng He, Hongxiang Zhang, Yongjun Zhu, Gongyuan Lu. Dynamic Performance Evaluation Method for Transfer in Rail Transit Station Based on Station Simulation and LSTM [J]. Journal of System Simulation, 2023, 35(3): 544-556. |
| [14] | Yang Li, Huijuan Zhang, Chenchen Ge, Kang Xie, Zhuang Li, Jinyuan Jia. Lightweight WebVR Real-Time Simulation of Large-Scale Fire Scenario in Metro [J]. Journal of System Simulation, 2023, 35(3): 646-657. |
| [15] | Tao Wang, Yingnian Wu, Rui Yang, Yueying Sun. Research on Real-time Gesture Classification Algorithm Based on IMU and sEMG Mixed Signals [J]. Journal of System Simulation, 2023, 35(2): 359-371. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
