

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (3): 667-678.doi: 10.16182/j.issn1004731x.joss.23-1375
• Papers • Previous Articles Next Articles
Lin Guijuan, Li Zihan, Wang Yu
Received:2023-11-14
Revised:2023-12-09
Online:2025-03-17
Published:2025-03-21
Contact:
Li Zihan
CLC Number:
Lin Guijuan, Li Zihan, Wang Yu. Research on Improved A* Algorithm Path Planning Based on Global Key Point Extraction[J]. Journal of System Simulation, 2025, 37(3): 667-678.
Fig. 1
Raster map
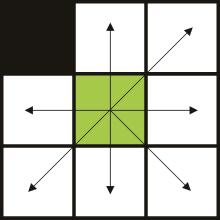
Fig. 2
Robot move direction
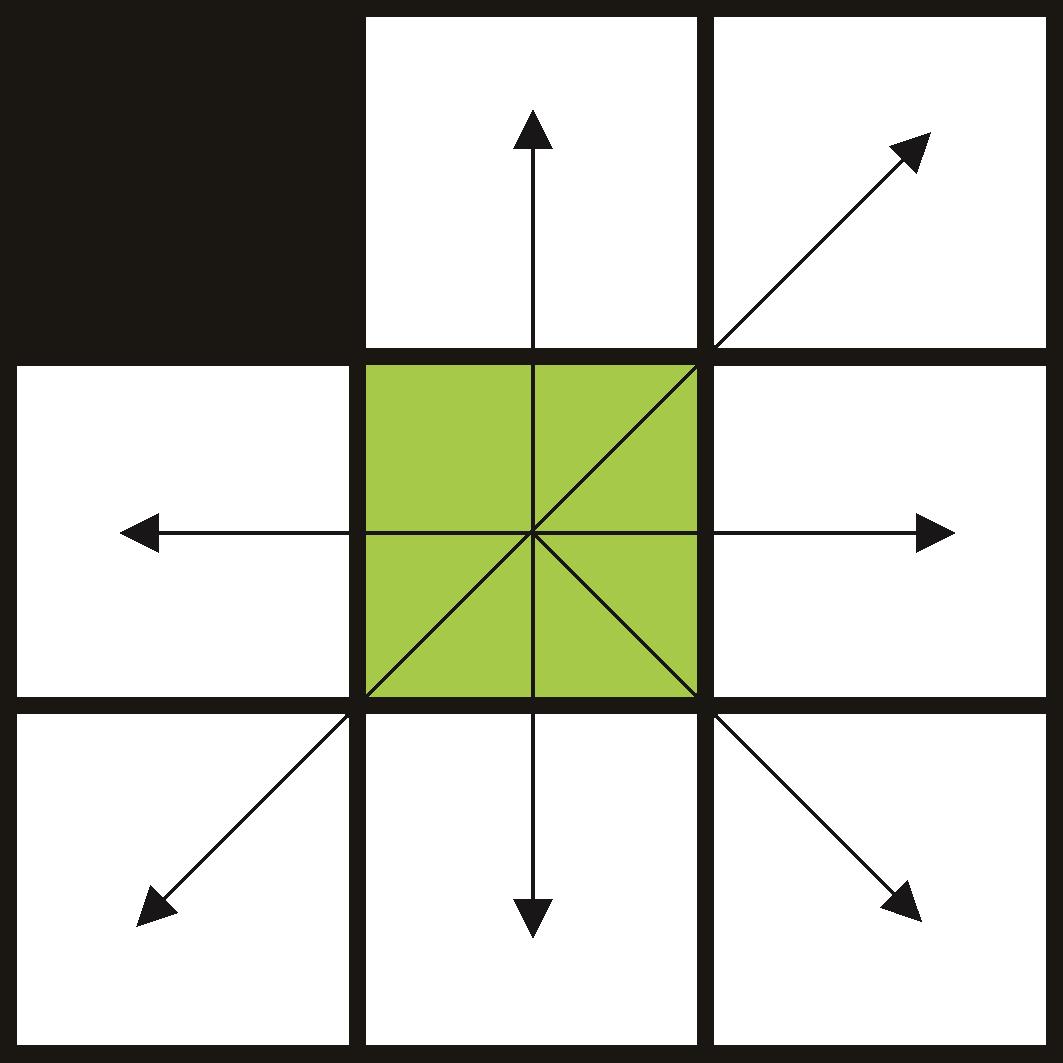
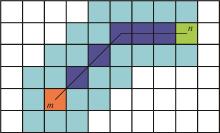
Fig. 3
A* algorithm running process
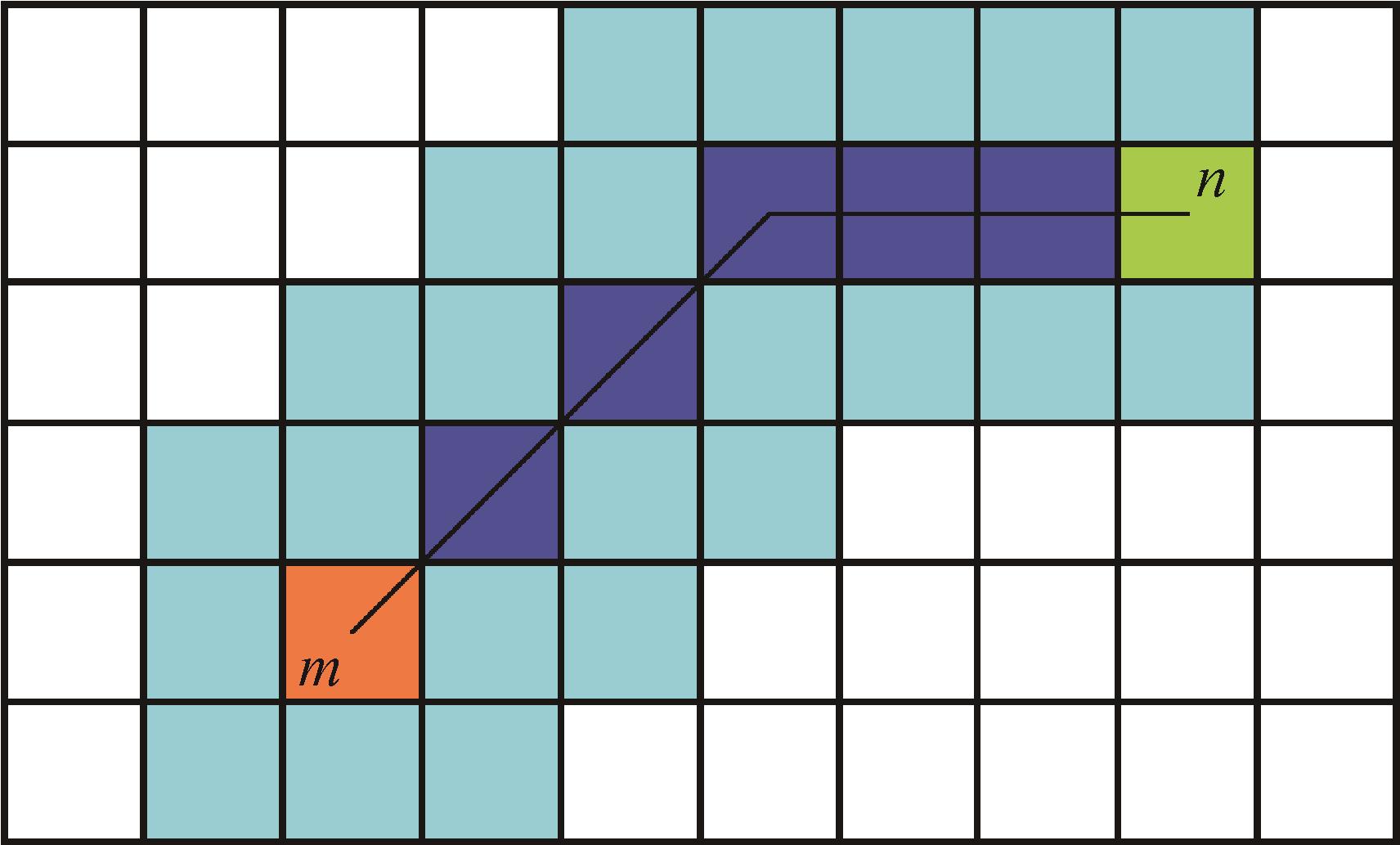
Fig. 4
Part of U-shaped trap in A* algorithm
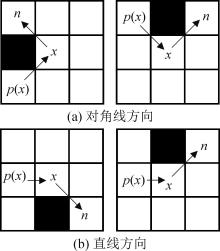
Fig. 5
Forced neighbor node
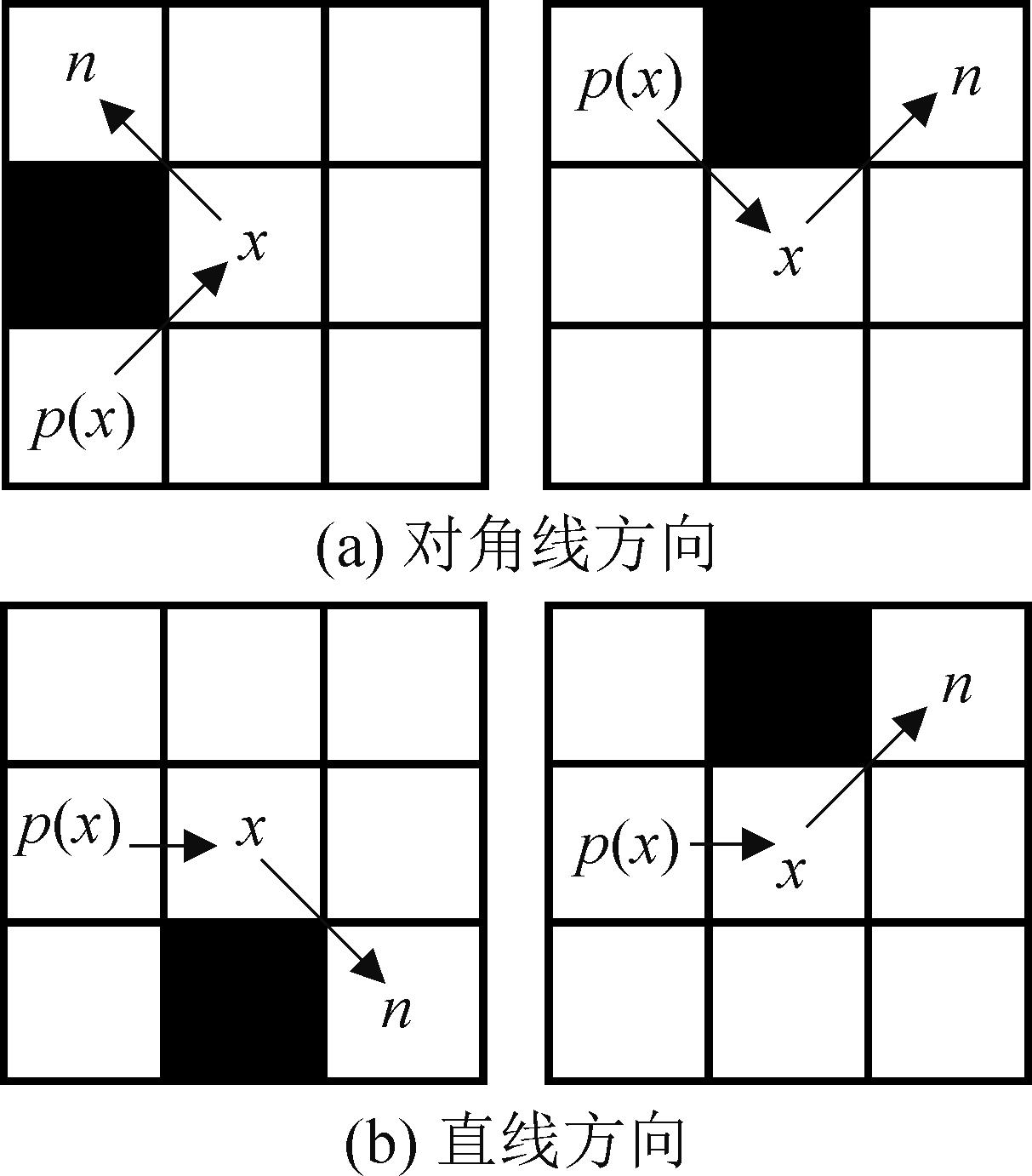
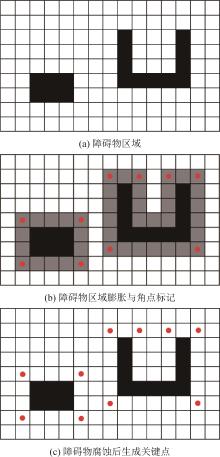
Fig. 6
Keypoint generation procedure
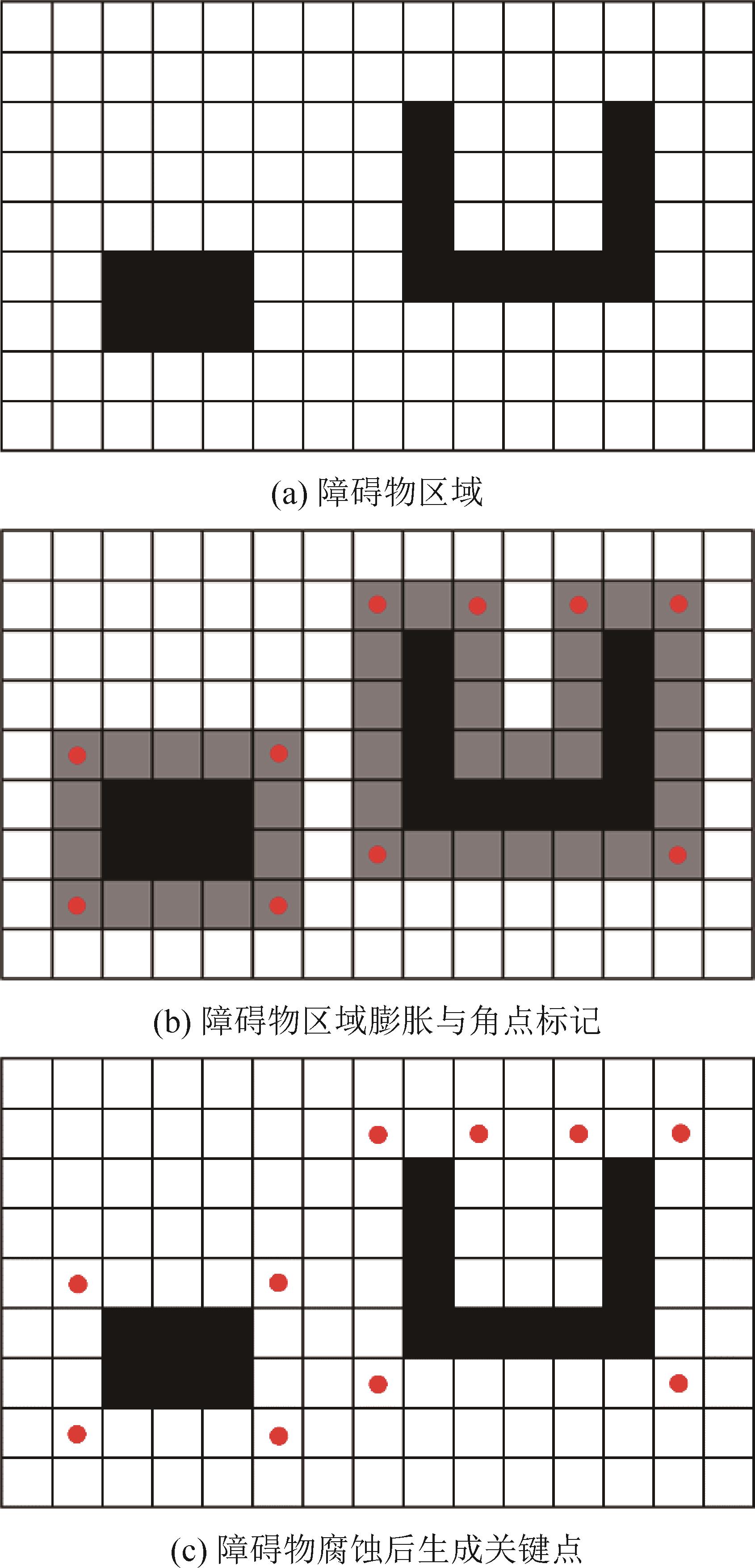
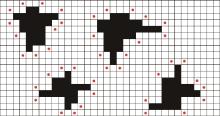
Fig. 7
Irregular region key point extraction results
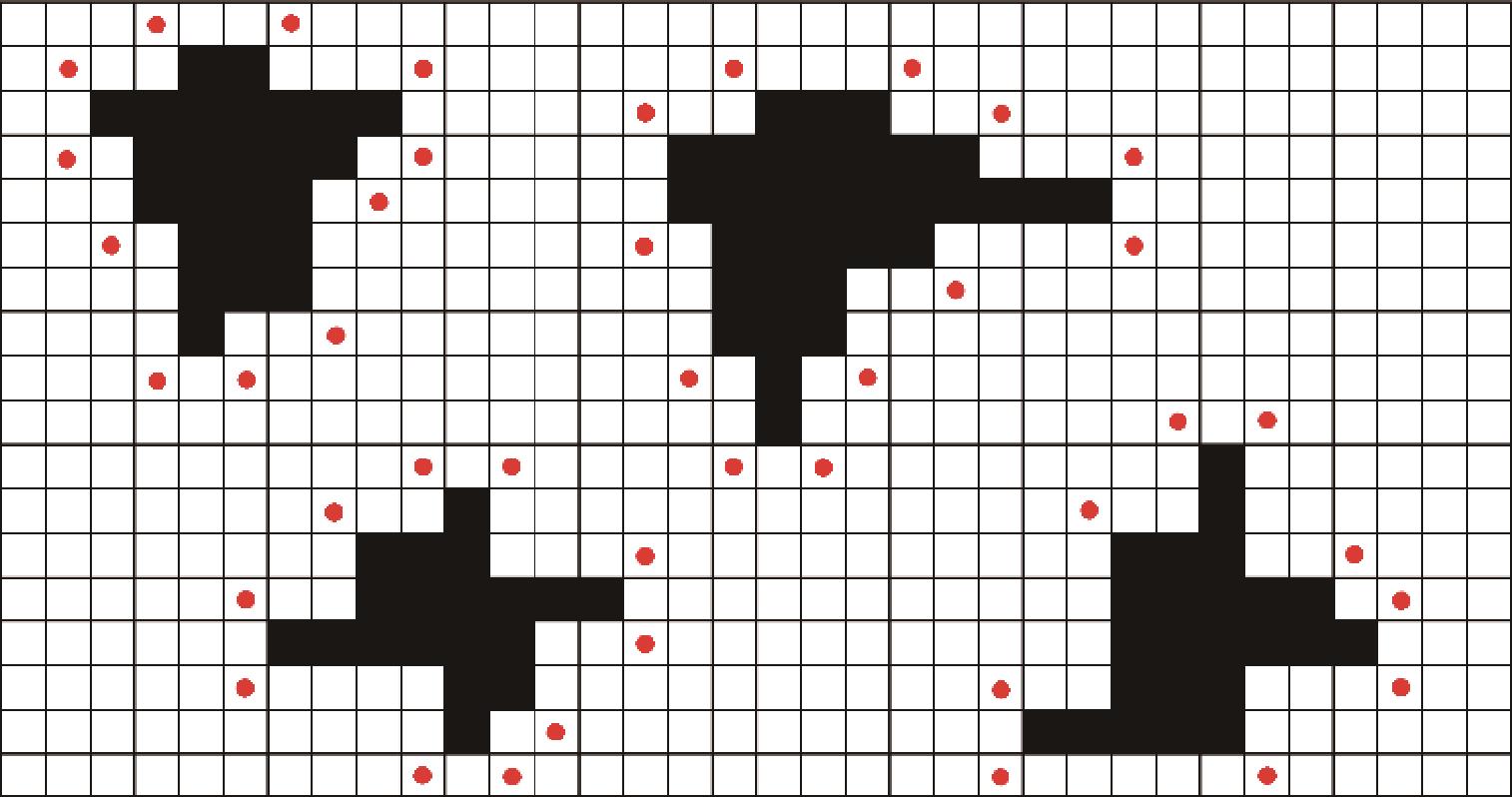
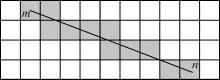
Fig. 8
Bresenham line algorithm
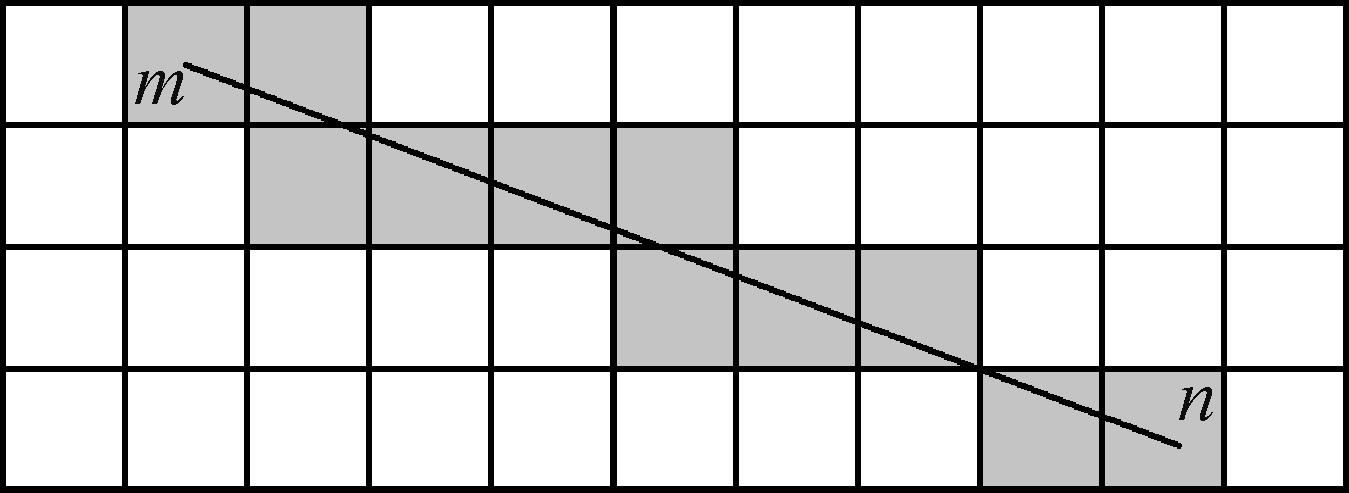
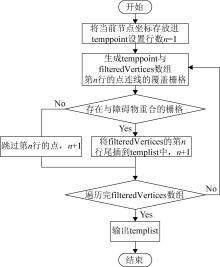
Fig. 9
Find neighbor node
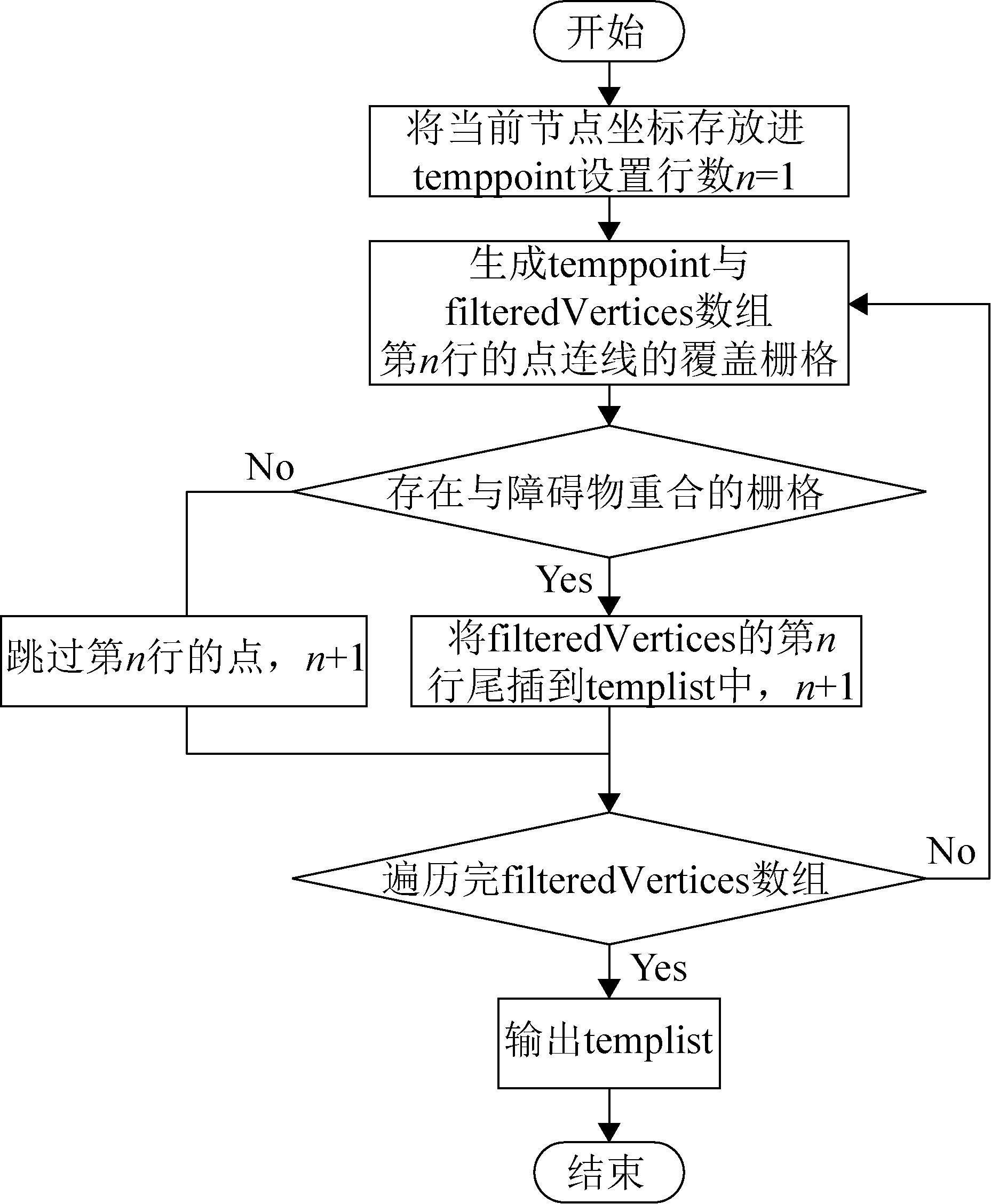
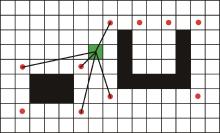
Fig. 10
Neighbor points
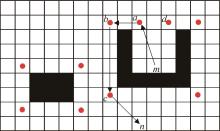
Fig. 11
Improved A* algorithm pathfinding process
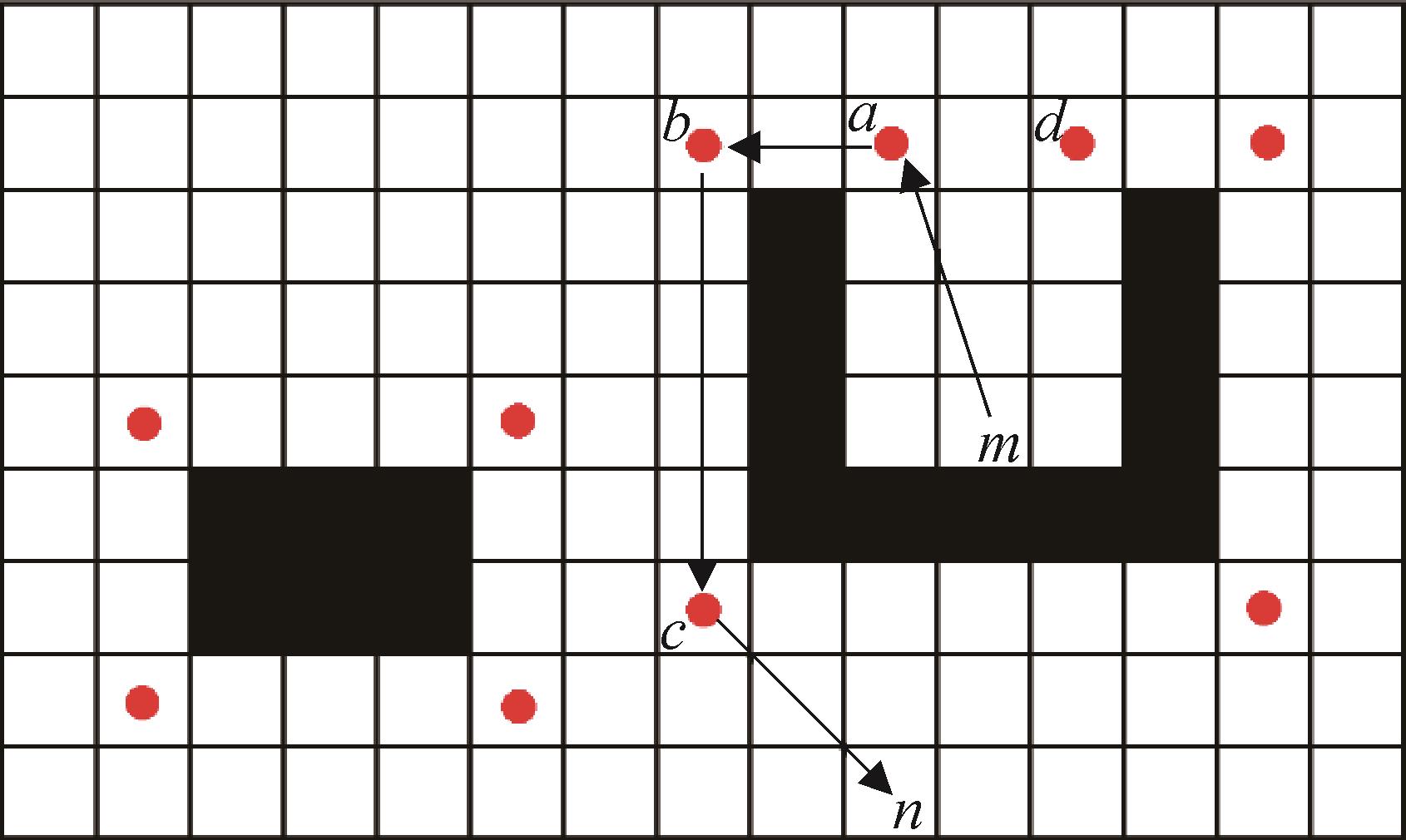
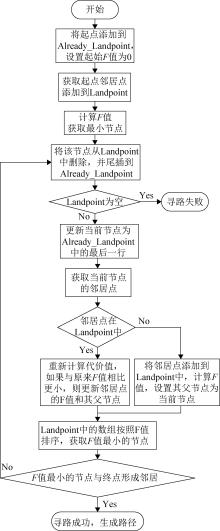
Fig. 12
Improved A* algorithm flow chart
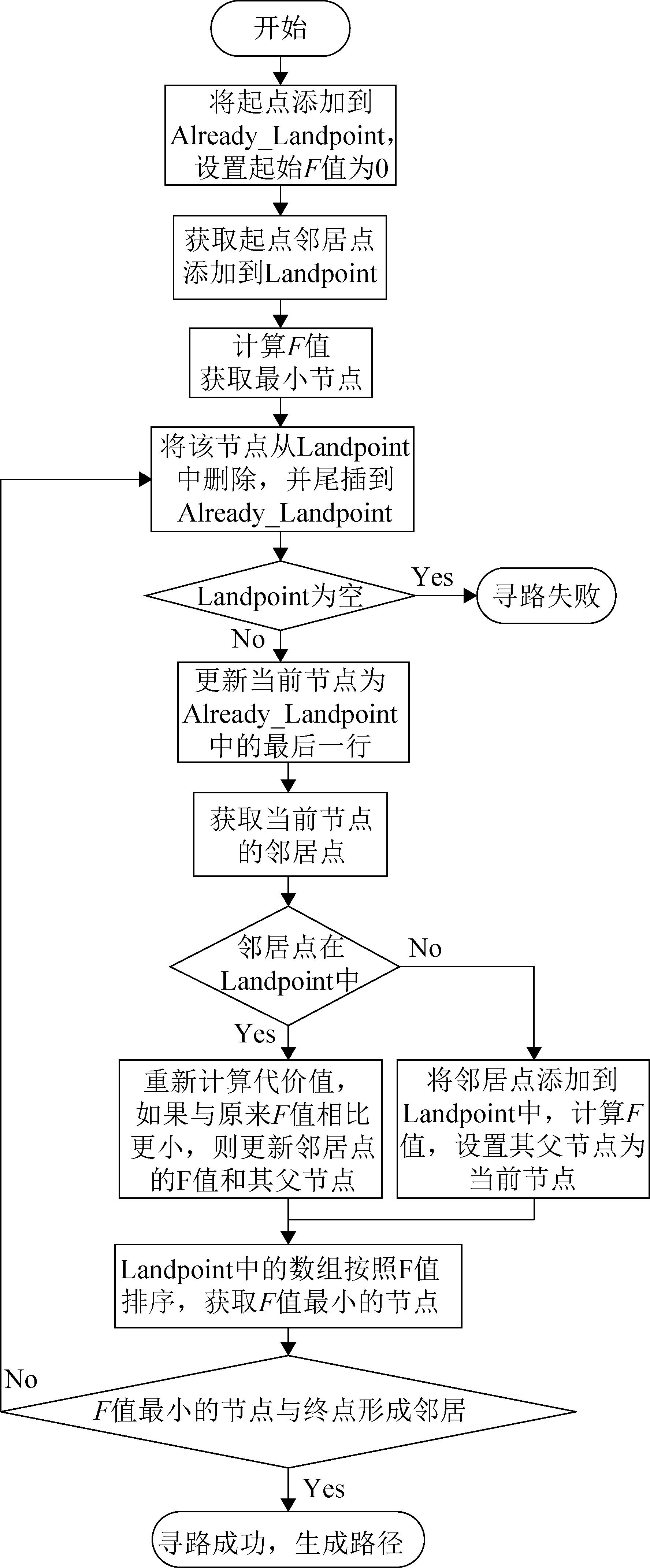
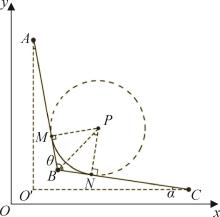
Fig. 13
Corner smoothing
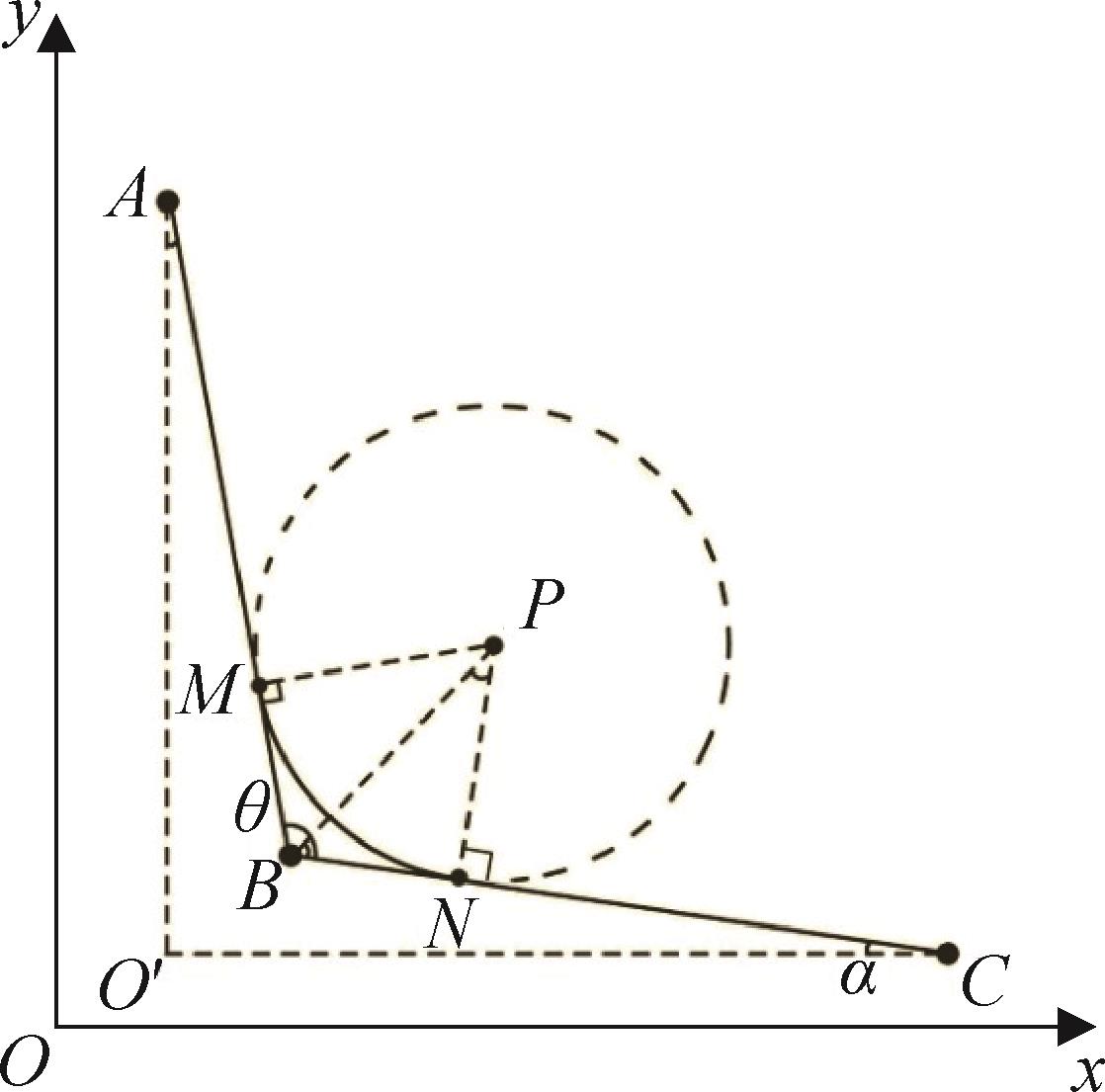
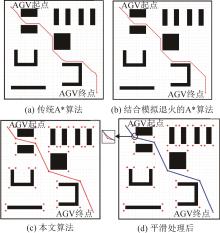
Fig. 14
Algorithm comparison simulation Ⅰ
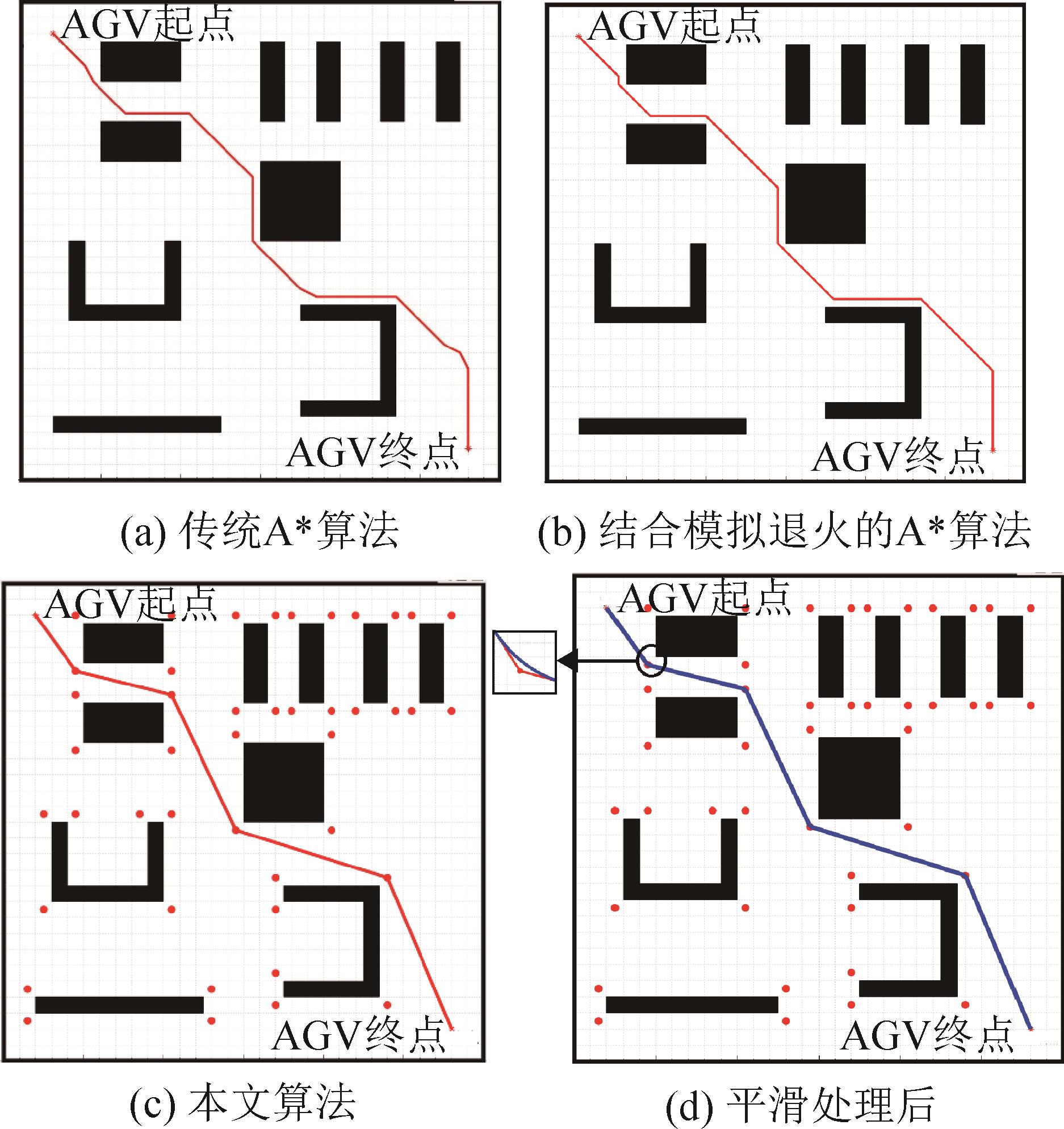
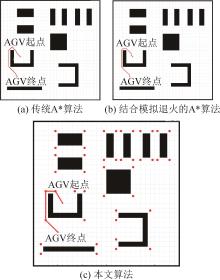
Fig. 15
Algorithm comparison simulation Ⅱ
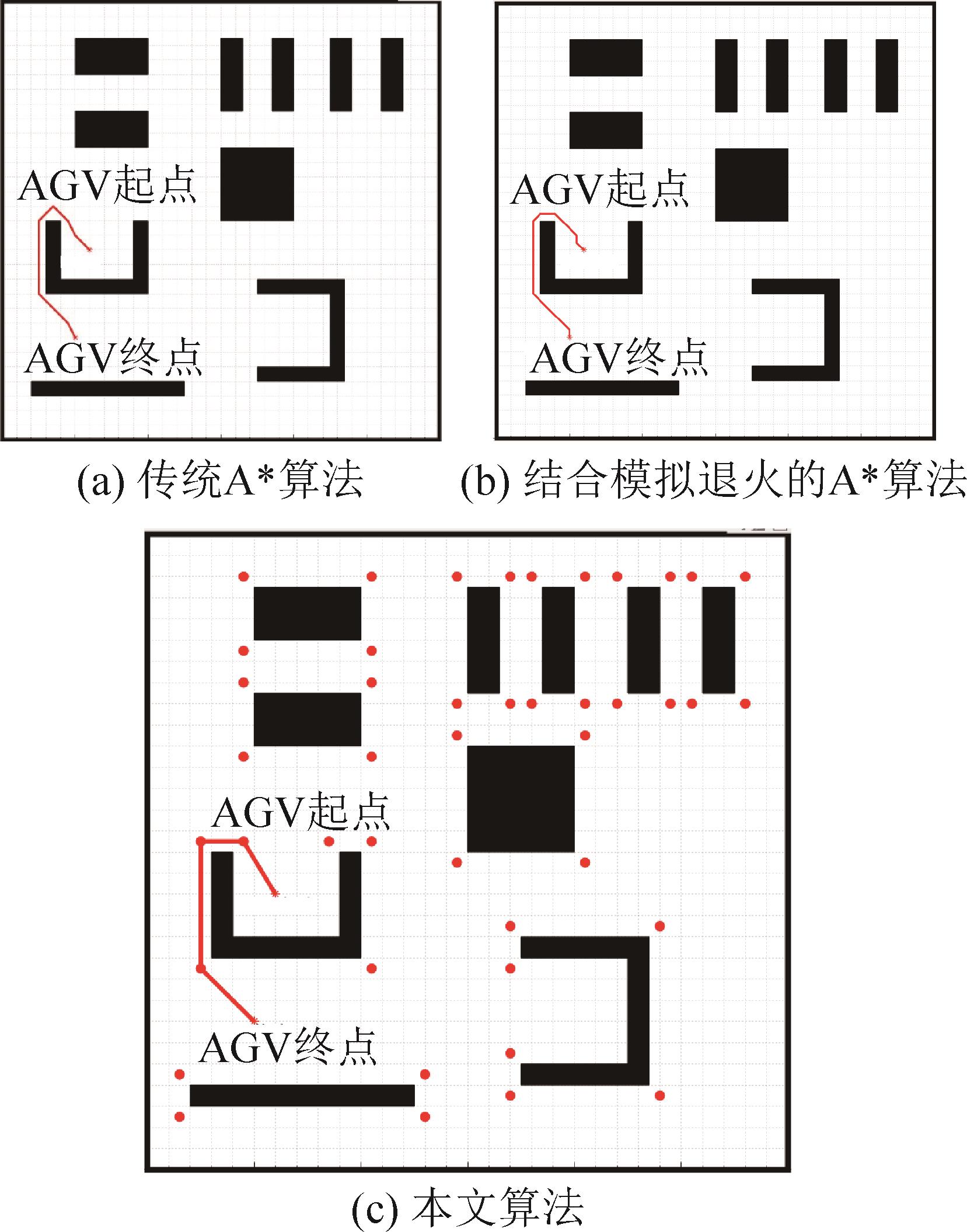
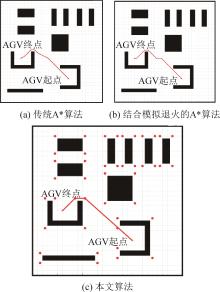
Fig. 16
Algorithm comparison simulation 3

Table 1
Comparison of experimental results of different algorithms under other conditions
| 序号 | 坐标点 | 传统A*算法 | 结合模拟退火的A*算法 | 本文算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 起点 | 终点 | 路径/m | 时间/s | 折点数量 | 路径/m | 时间/s | 折点数量 | 路径/m | 时间/s | 折点数量 | |
| 1 | (10, 10) | (50, 24) | 45.79 | 0.269 | 4 | 45.44 | 0.078 | 3 | 43.30 | 0.066 | 1 |
| 2 | (4, 56) | (56, 4) | 84.54 | 0.519 | 12 | 84.08 | 0.106 | 9 | 80.25 | 0.082 | 4 |
| 3 | (4, 4) | (58, 58) | 89.69 | 1.137 | 7 | 88.66 | 0.418 | 4 | 83.55 | 0.085 | 4 |
| 4 | (50, 52) | (4, 42) | 55.77 | 1.824 | 7 | 55.14 | 1.096 | 7 | 53.36 | 0.082 | 4 |
| 5 | (12, 26) | (10, 14) | 28.61 | 16.695 | 6 | 28.14 | 10.31 | 7 | 27.90 | 0.065 | 3 |
| 6 | (40, 14) | (12, 26) | 37.11 | 7.562 | 5 | 36.40 | 3.808 | 5 | 35.83 | 0.071 | 2 |
| 7 | (38, 14) | (10, 24) | 37.94 | 91.402 | 5 | 37.58 | 31.62 | 5 | 36.98 | 0.078 | 2 |
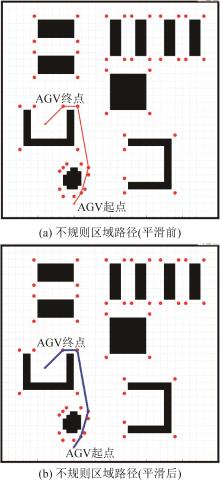
Fig. 17
Avoid irregular obstacles
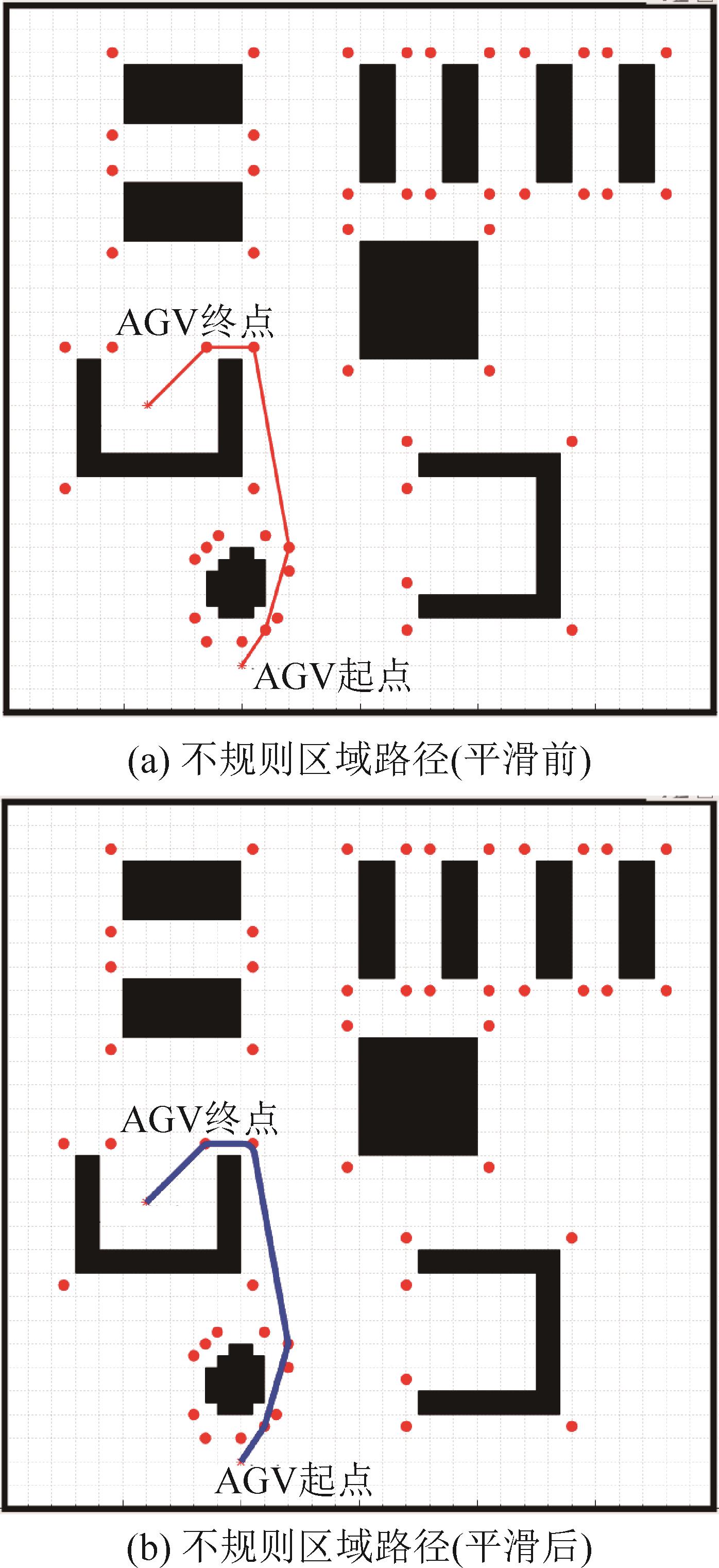

Fig. 18
Robot system


Fig. 19
Mobile robot is in a U-shaped area


Fig. 20
Environmental map
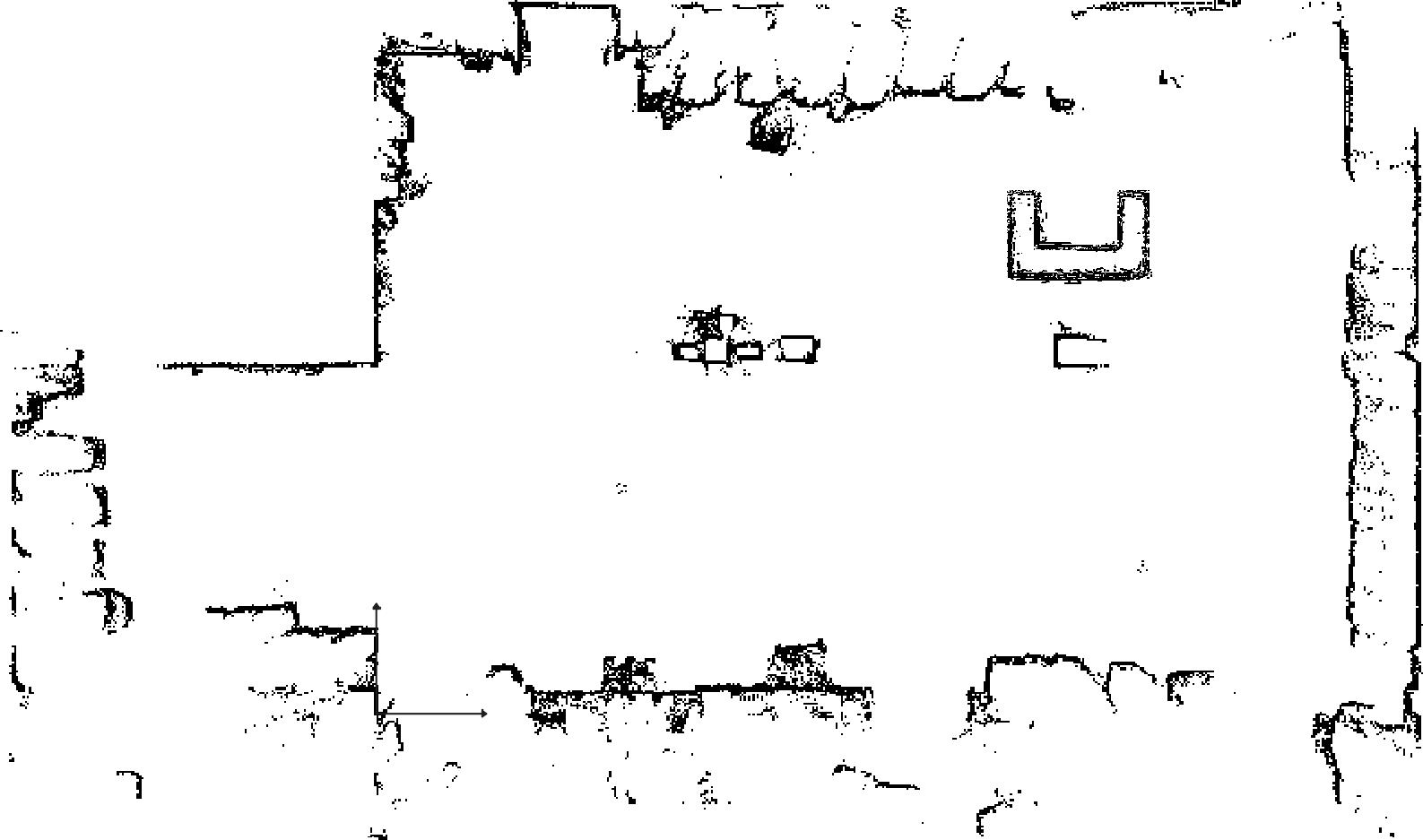
Fig. 21
General scene experiment
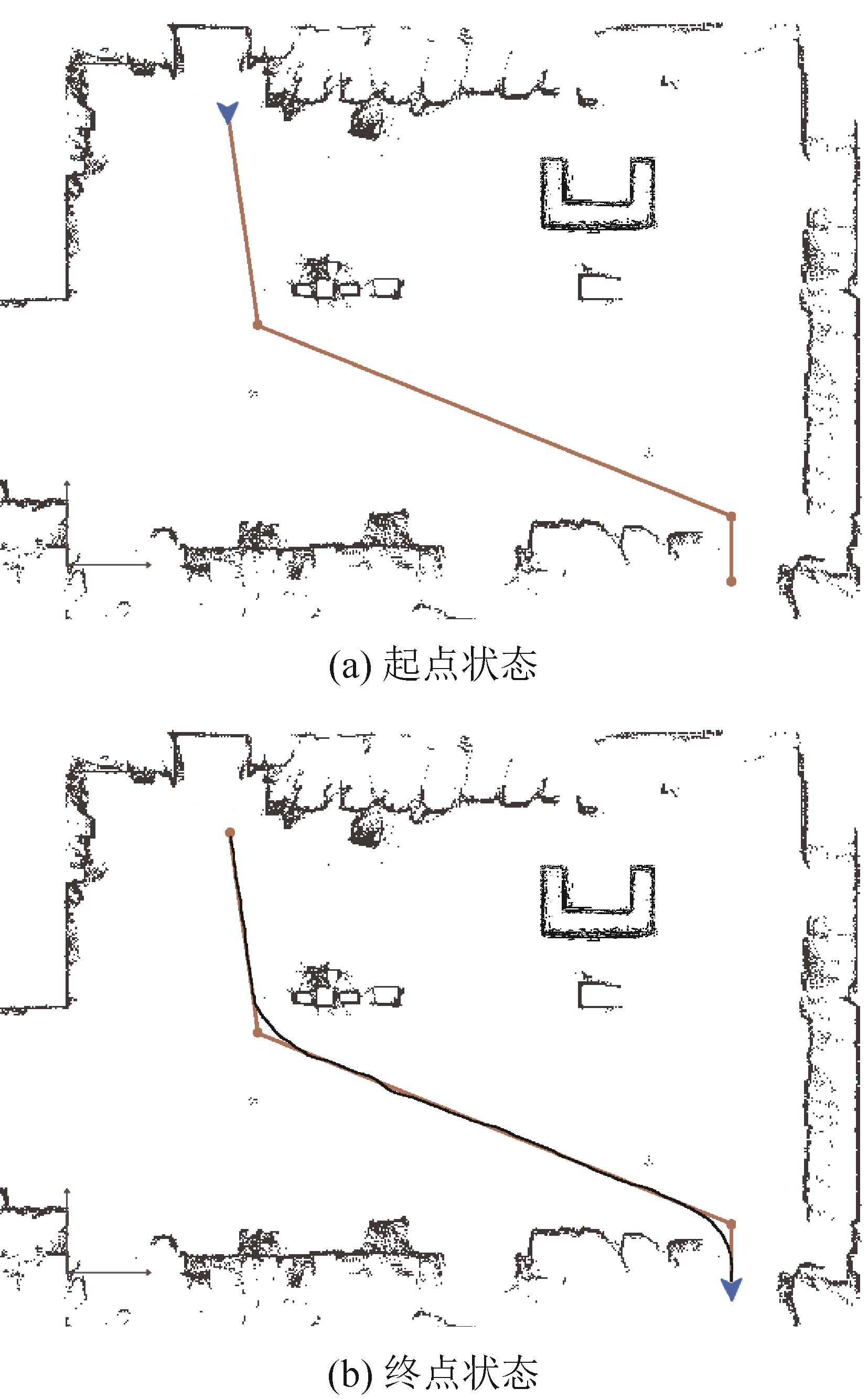
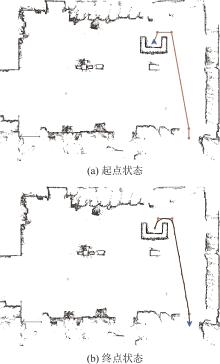
Fig. 22
U-shaped scene experiment
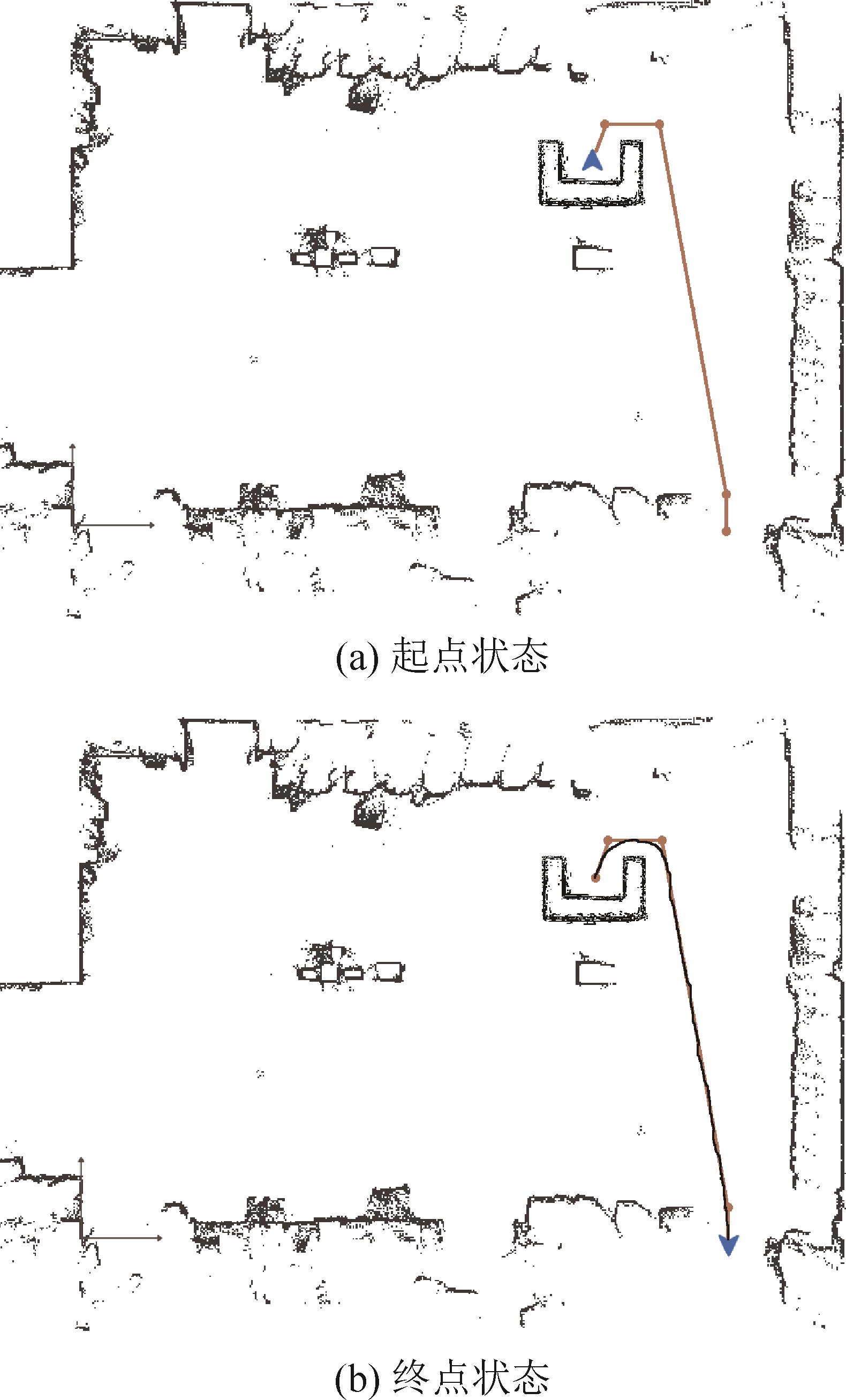

Fig. 23
Robot moves out of U-shaped environment

| 1 | 唐旭晖, 辛绍杰. 改进蚁群算法的移动机器人路径规划[J]. 计算机工程与应用, 2022, 58(5): 287-295. |
| Tang Xuhui, Xin Shaojie. Improved Ant Colony Algorithm for Mobile Robot Path Planning[J]. Computer Engineering and Applications, 2022, 58(5): 287-295. | |
| 2 | 赵迪, 何克勤, 赵祖高. 基于改进粒子群优化算法的移动机器人路径规划[J]. 传感器与微系统, 2023, 42(6): 150-153. |
| Zhao Di, He Keqin, Zhao Zugao. Path Planning for Mobile Robot Based on Improved PSO Algorithm[J]. Transducer and Microsystem Technologies, 2023, 42(6): 150-153. | |
| 3 | Li Jinyang, Zhou Xingchen, Gu Long, et al. The Cutting Path Planning of Main Components in China Initiative Accelerator Driven Subcritical System Based on the Quantum Evolutionary Algorithm[J]. Nuclear Engineering and Design, 2023, 408: 112332. |
| 4 | 李杰. 基于改进A_Star算法的移动机器人动态路径规划[J]. 黑龙江科学, 2023, 14(16): 47-52, 56. |
| Li Jie. Dynamic Path Planning for Mobile Robots Based on Improved A_Star Algorithm[J]. Heilongjiang Science, 2023, 14(16): 47-52, 56. | |
| 5 | 何心, 李志恒, 李冰, 等. 一种改进蚁群算法的移动机器人路径规划研究[J]. 现代制造工程, 2023(2): 36-43. |
| He Xin, Li Zhiheng, Li Bing, et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Modern Manufacturing Engineering, 2023(2): 36-43. | |
| 6 | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 7 | Dijkstra E W. A Note on Two Problems in Connexion with Graphs[M]//Krzysztof R Apt, Hoare T. Edsger Wybe Dijkstra: His Life, Work, and Legacy. New York: ACM, 2022: 287-290. |
| 8 | Stentz A. Optimal and Efficient Path Planning for Partially-known Environments[C]//Proceedings of the 1994 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 1994: 3310-3317. |
| 9 | 陈骏, 沈琦琦. 自动导引车路径规划算法的研究综述[J]. 自动化与仪器仪表, 2023(9): 8-15. |
| Chen Jun, Shen Qiqi. Review of Path Planning Algorithms for Automated Guided Vehicles[J]. Automation & Instrumentation, 2023(9): 8-15. | |
| 10 | 赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910. |
| Zhao Xiao, Wang Zheng, Huang Chengkan, et al. Mobile Robot Path Planning Based on an Improved A* Algorithm[J]. Robot, 2018, 40(6): 903-910. | |
| 11 | Bu Zhaoxing, Korf R E. A*+BFHS: A Hybrid Heuristic Search Algorithm[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2022: 10138-10145. |
| 12 | Wang Huanwei, Lou Shangjie, Jing Jing, et al. The EBS-a* Algorithm: AN Improved A* Algorithm for Path Planning[J]. PLoS One, 2022, 17(2): e0263841. |
| 13 | Yangqi Ou, Fan Yuexin, Zhang Xinglan, et al. Improved A* Path Planning Method Based on the Grid Map[J]. Sensors, 2022, 22(16): 6198. |
| 14 | Harabor Daniel, Grastien Alban. Improving Jump Point Search[C]//Proceedings of the International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2014: 128-135. |
| 15 | Hu Yue, Harabor Daniel, Qin Long, et al. Regarding Goal Bounding and Jump Point Search[J]. Journal of Artificial Intelligence Research, 2021, 70: 631-681. |
| 16 | 马小陆, 梅宏. 基于改进势场蚁群算法的移动机器人全局路径规划[J]. 机械工程学报, 2021, 57(1): 19-27. |
| Ma Xiaolu, Mei Hong. Mobile Robot Global Path Planning Based on Improved Ant Colony System Algorithm with Potential Field[J]. Journal of Mechanical Engineering, 2021, 57(1): 19-27. | |
| 17 | 万方, 周风余, 尹磊, 等. 基于电势场法的移动机器人全局路径规划算法[J]. 机器人, 2019, 41(6): 742-750. |
| Wan Fang, Zhou Fengyu, Yin Lei, et al. Global Path Planning Algorithm of Mobile Robot Based on Electric Potential Field[J]. Robot, 2019, 41(6): 742-750. | |
| 18 | 徐微, 汤俊伟, 张驰. 改进A*与动态窗口算法的移动机器人路径规划[J]. 计算机仿真, 2023, 40(3): 447-452. |
| Xu Wei, Tang Junwei, Zhang Chi. Path Planning of Mobile Robot Based on Improved A* and Dynamic Window Algorithm[J]. Computer Simulation, 2023, 40(3): 447-452. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
