

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2171-2180.doi: 10.16182/j.issn1004731x.joss.23-0619
Previous Articles Next Articles
Ji Peng1, Zhang Xinyuan1, Gao Shuaixuan2, Wei Shuorang3
Received:2023-05-24
Revised:2023-07-21
Online:2024-09-15
Published:2024-09-30
Contact:
Zhang Xinyuan
CLC Number:
Ji Peng, Zhang Xinyuan, Gao Shuaixuan, Wei Shuorang. Path Planning Based on Improved A* and Dynamic Window Approach[J]. Journal of System Simulation, 2024, 36(9): 2171-2180.
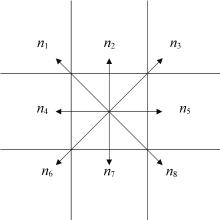
Fig. 1
Node moving direction
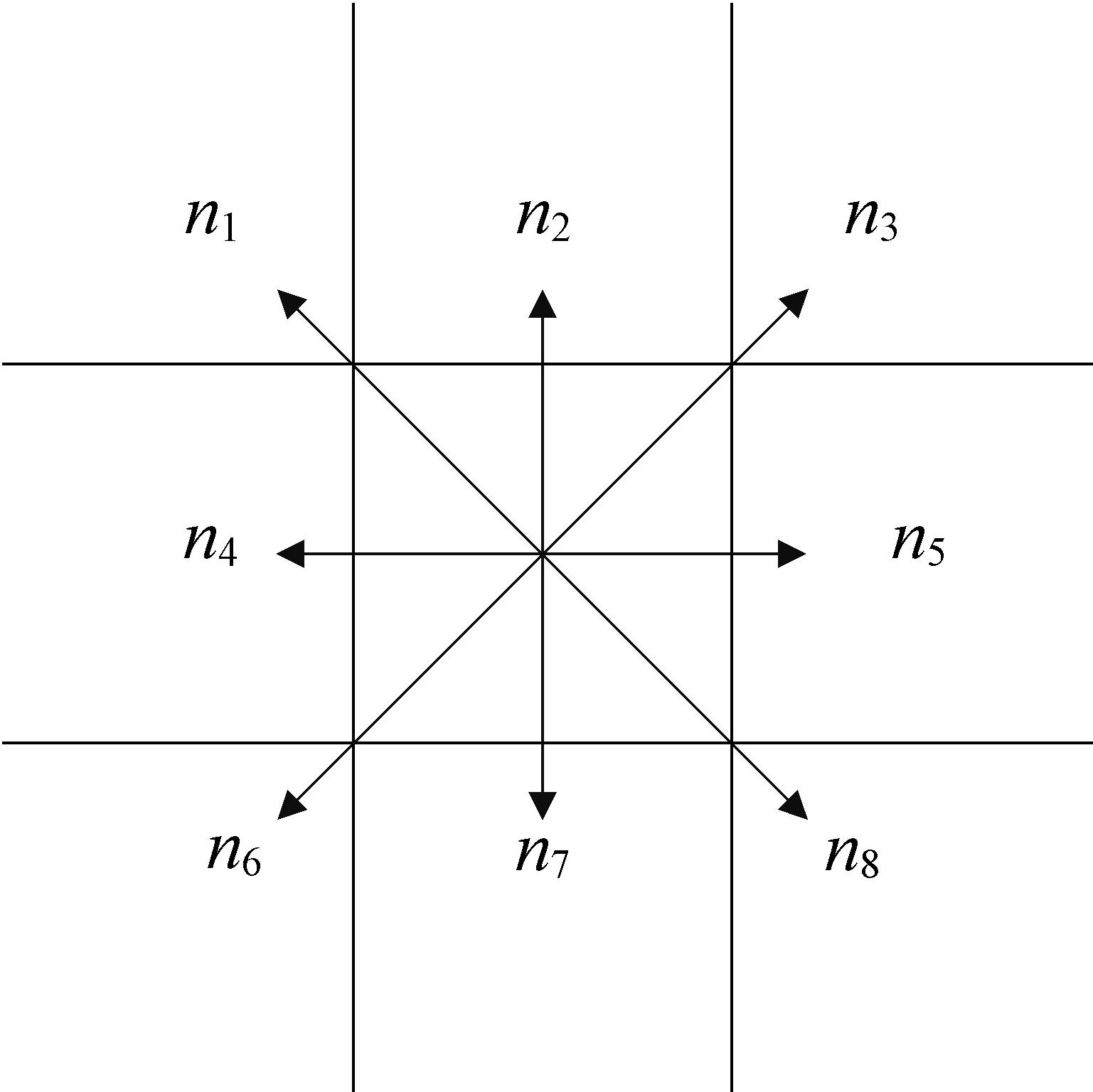
Table 1
Corresponding table of node direction discards
| θ | 保留的5个方向 | 去除的3个方向 |
|---|---|---|
| [330°, 360°)∪ [0°, 30°) | n1、n2、n3、n4、n5 | n6、n7、n8 |
| [30°, 90°) | n1、n2、n3、n5、n8 | n4、n6、n7 |
| [90°, 150°) | n3、n5、n6、n7、n8 | n1、n2、n4 |
| [150°, 210°) | n4、n5、n6、n7、n8 | n1、n2、n3 |
| [210°, 270°) | n1、n4、n6、n7、n8 | n2、n3、n5 |
| [270°, 330°) | n1、n2、n3、n4、n6 | n5、n7、n8 |
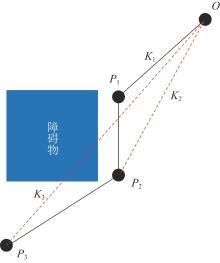
Fig. 2
Removing redundant nodes
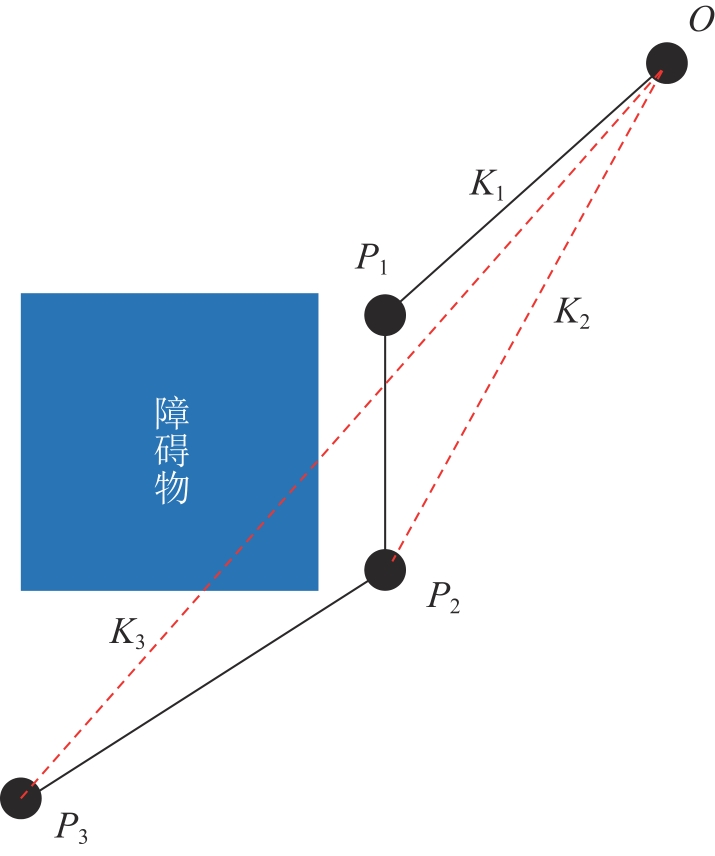
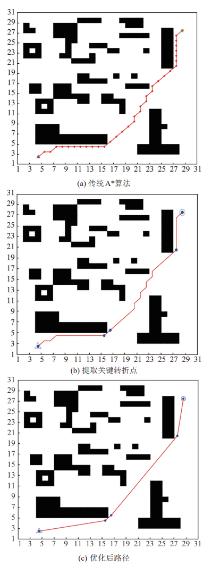
Fig. 3
Comparison of path planning algorithms
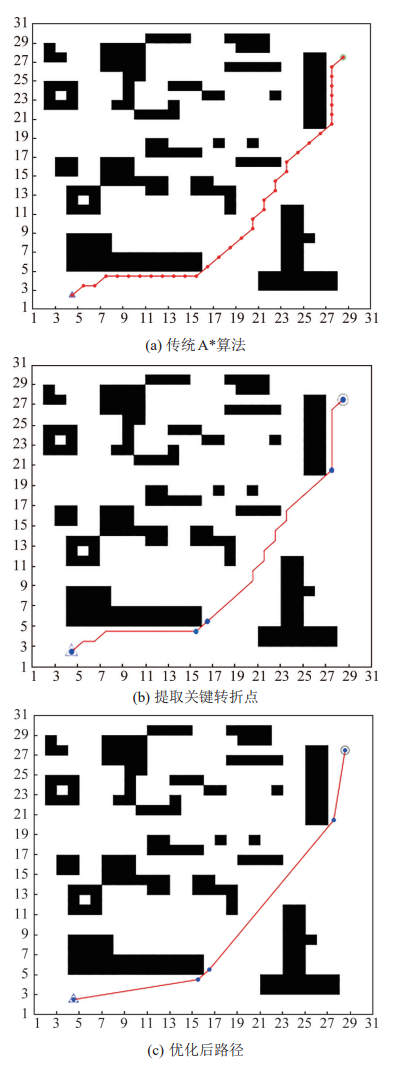
Table 2
Algorithm comparison
| 路径规划算法 | 路径长度/m | 规划时间/s | 拐点数量 |
|---|---|---|---|
| 传统A*算法 | 46.560 3 | 0.685 3 | 33 |
| 改进A*算法 | 44.860 9 | 0.376 8 | 3 |

Fig. 4
DWA comparison
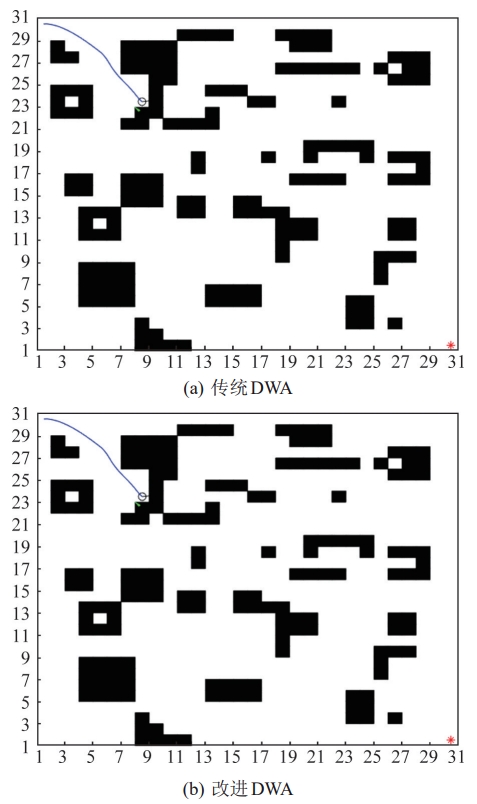
Table 3
Algorithm performance comparison
| 路径规划算法 | 路径长度/m | 规划时间/ms |
|---|---|---|
| 传统DWA | 19.212 | 133.478 |
| 改进DWA | 19.106 | 117.461 |
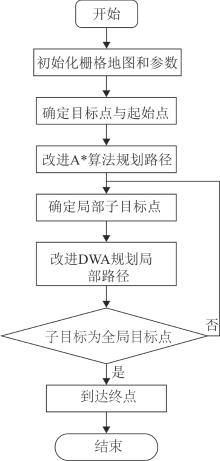
Fig. 5
Flowchart of fusion algorithm
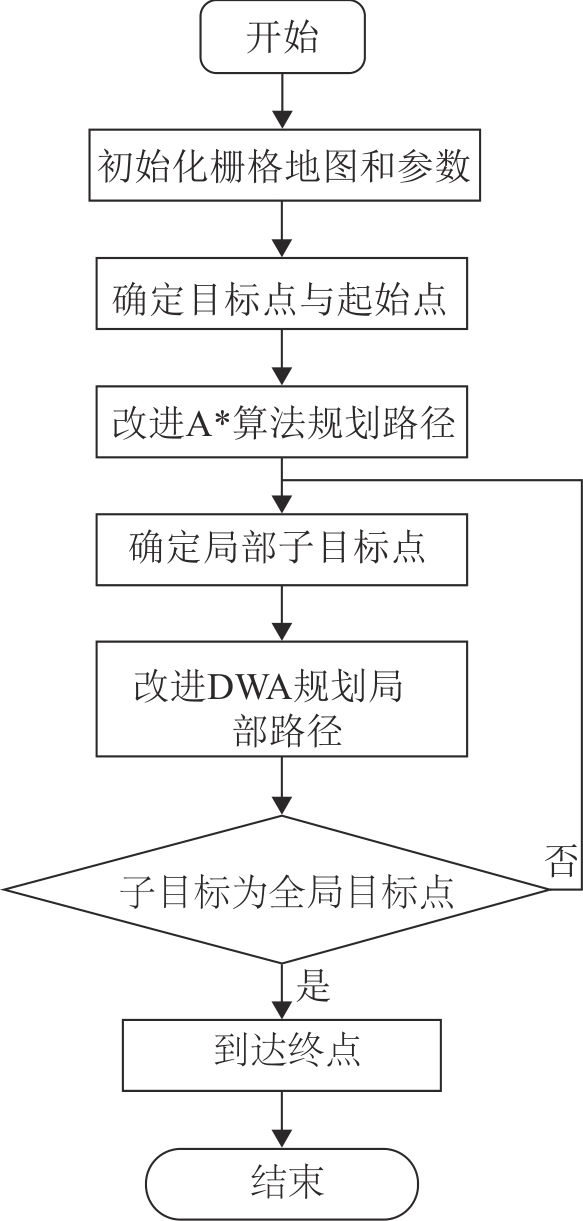
Fig. 6
Algorithm optimization process
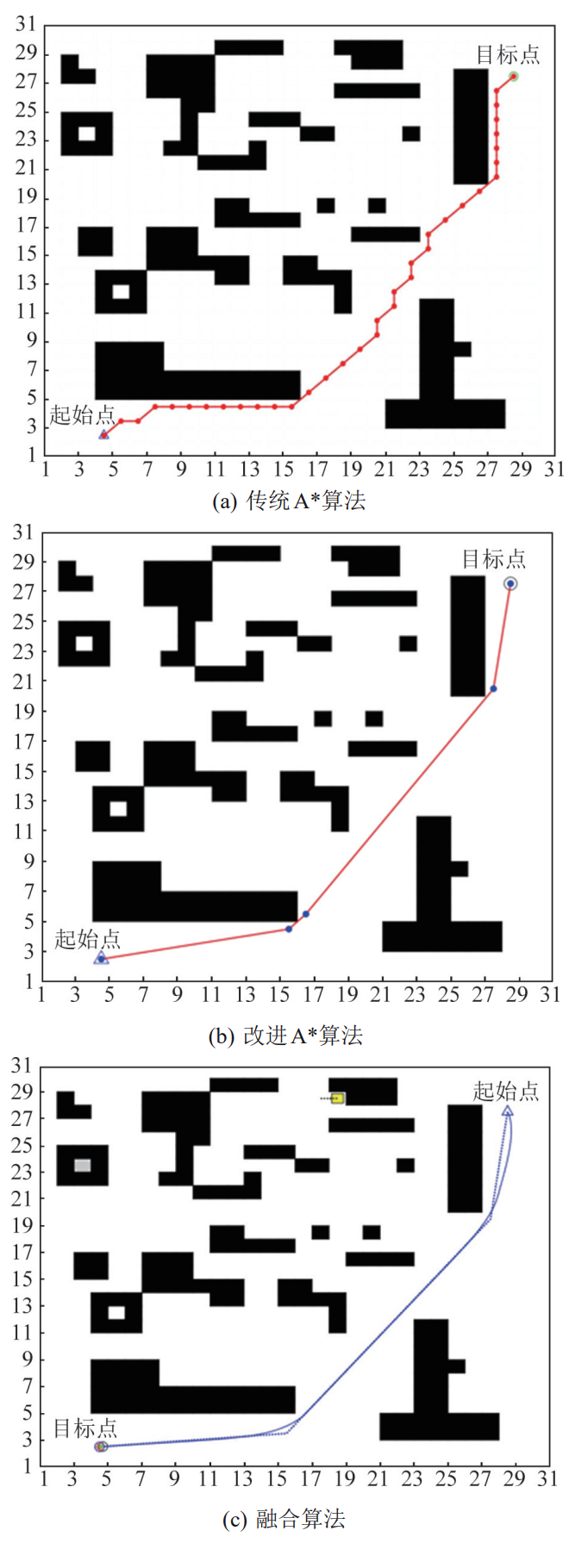

Fig. 7
Path planning diagram for fusion algorithm without random obstacles
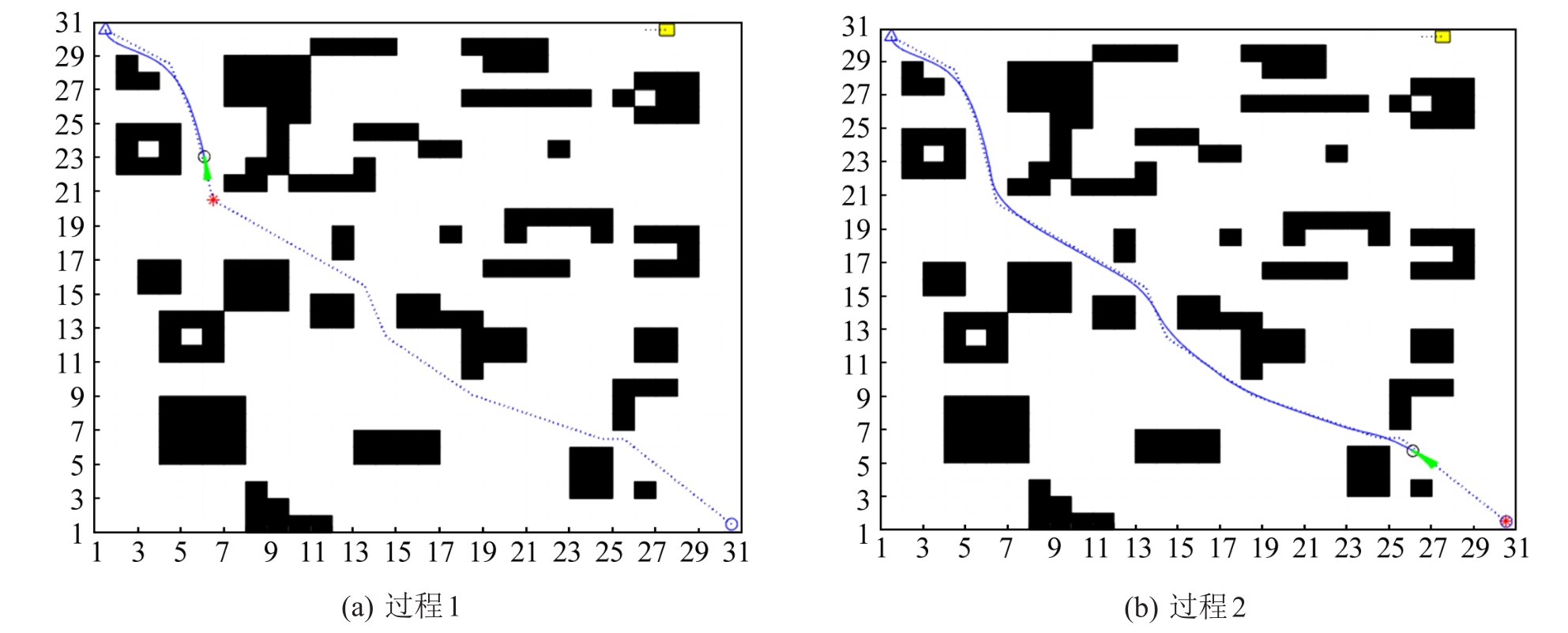

Fig. 8
Path planning diagram for a fusion algorithm under a random obstacle
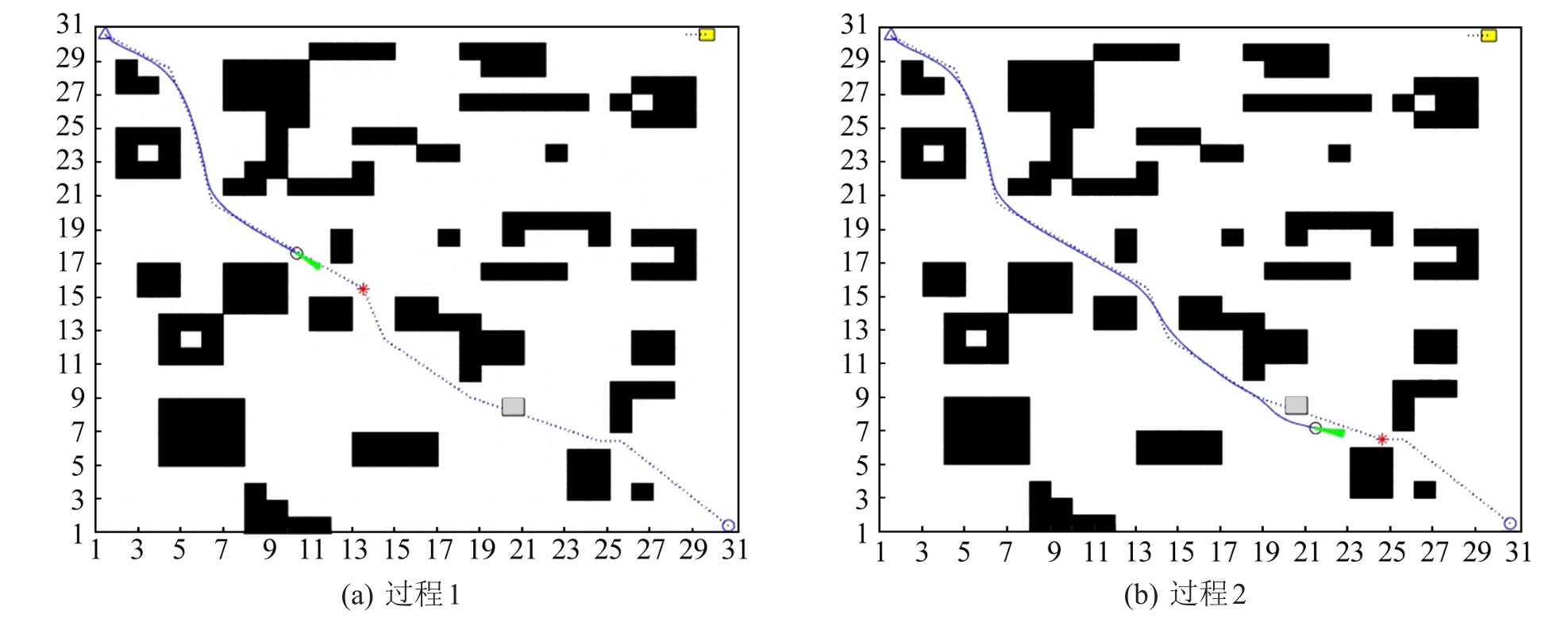

Fig. 9
Path planning diagram for fusion algorithm under two random obstacles
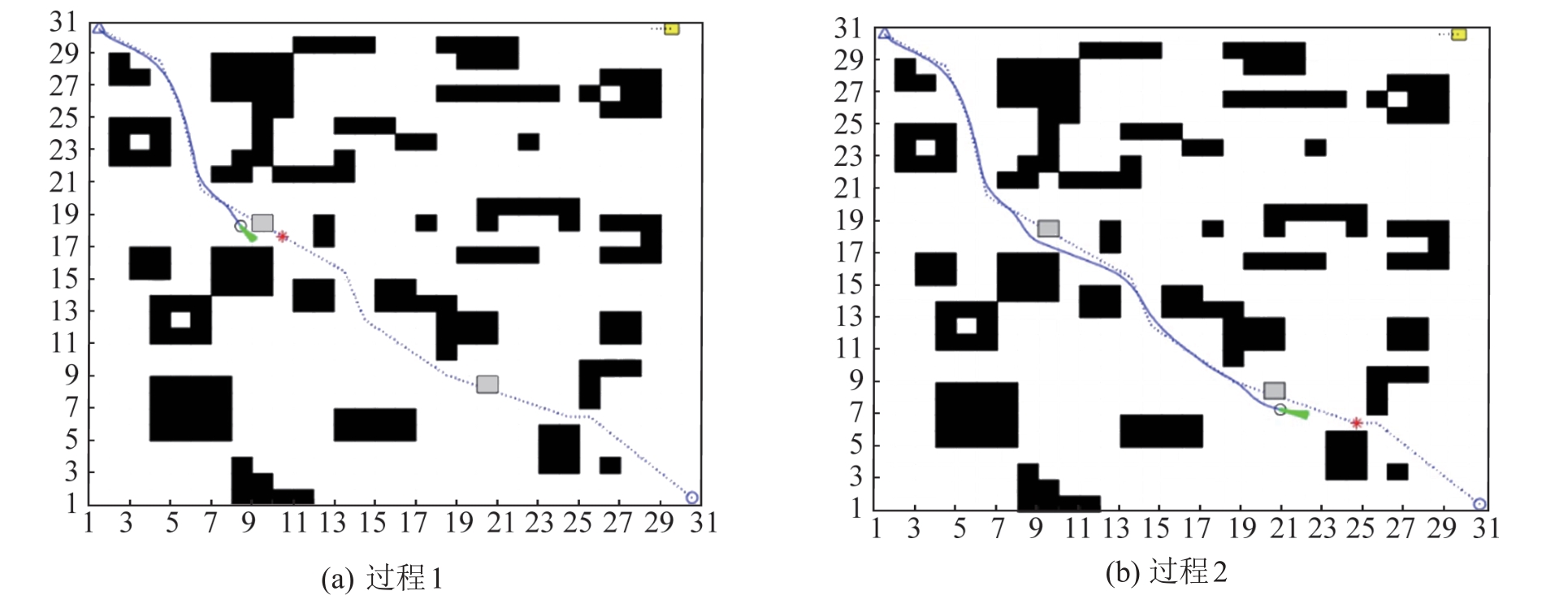

Fig. 10
Fusion algorithm path planning under dynamic-static obstacles
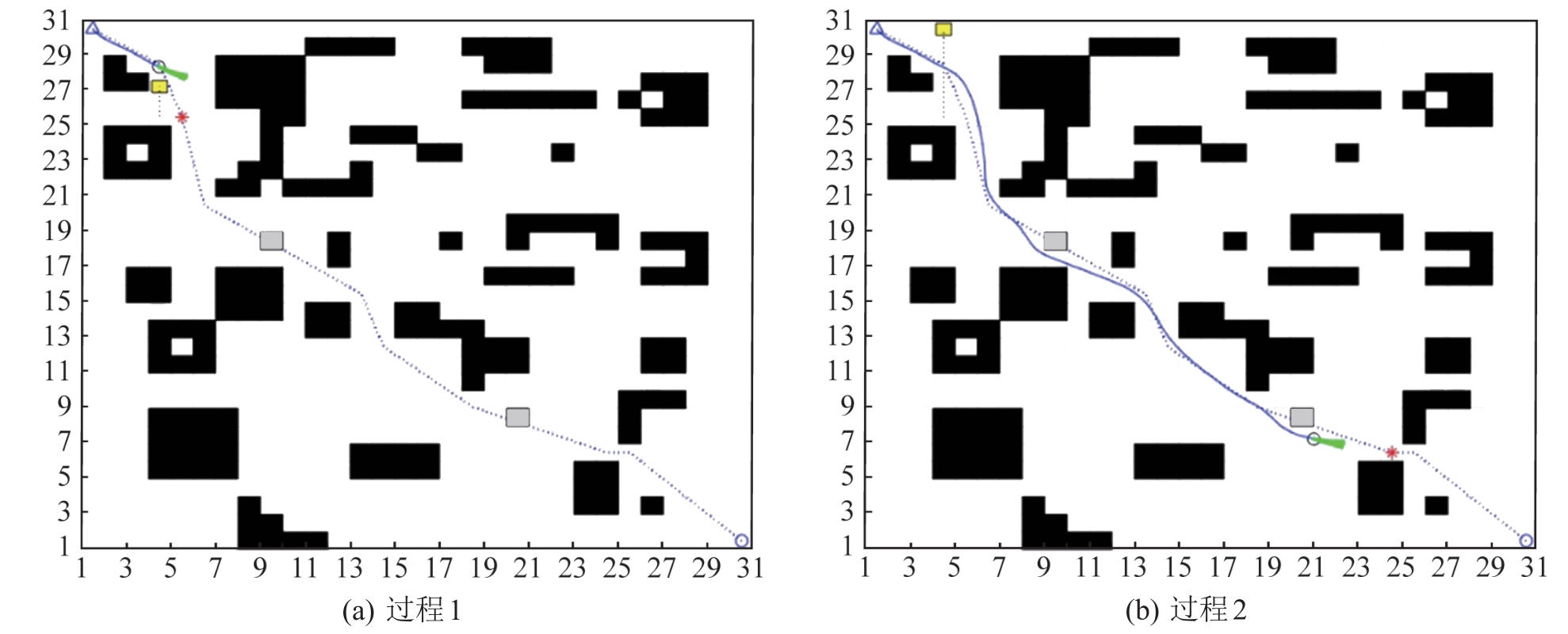
Table 4
Smart cart hardware
| 硬件名称 | 具体型号 |
|---|---|
| 激光雷达 | 思岚雷达RPLIDAR A1 |
| 深度相机 | 奥比中光Astra pro |
| ROS主机 | 英伟达Jetson Nano |
| 底盘控制 | STM32F103RCT6 |
| 惯导测量单元 | MPU6050 |
| 电机 | 直流有刷电机 |

Fig. 11
Lidar scanning map
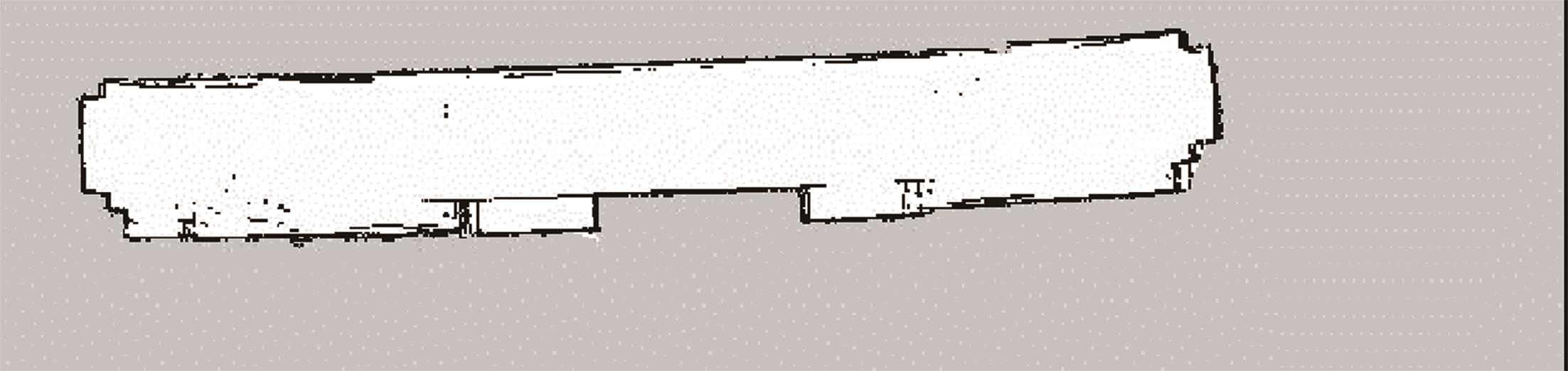

Fig. 12
Experimental procedures
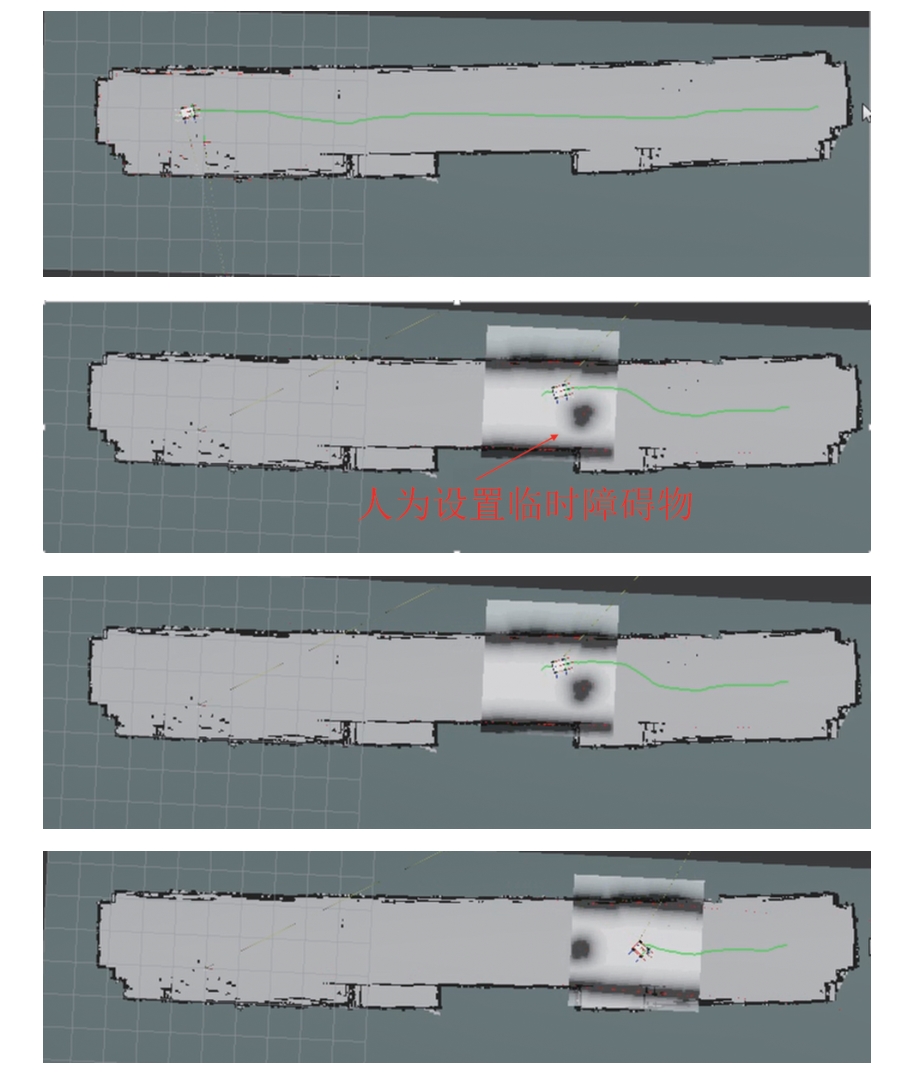
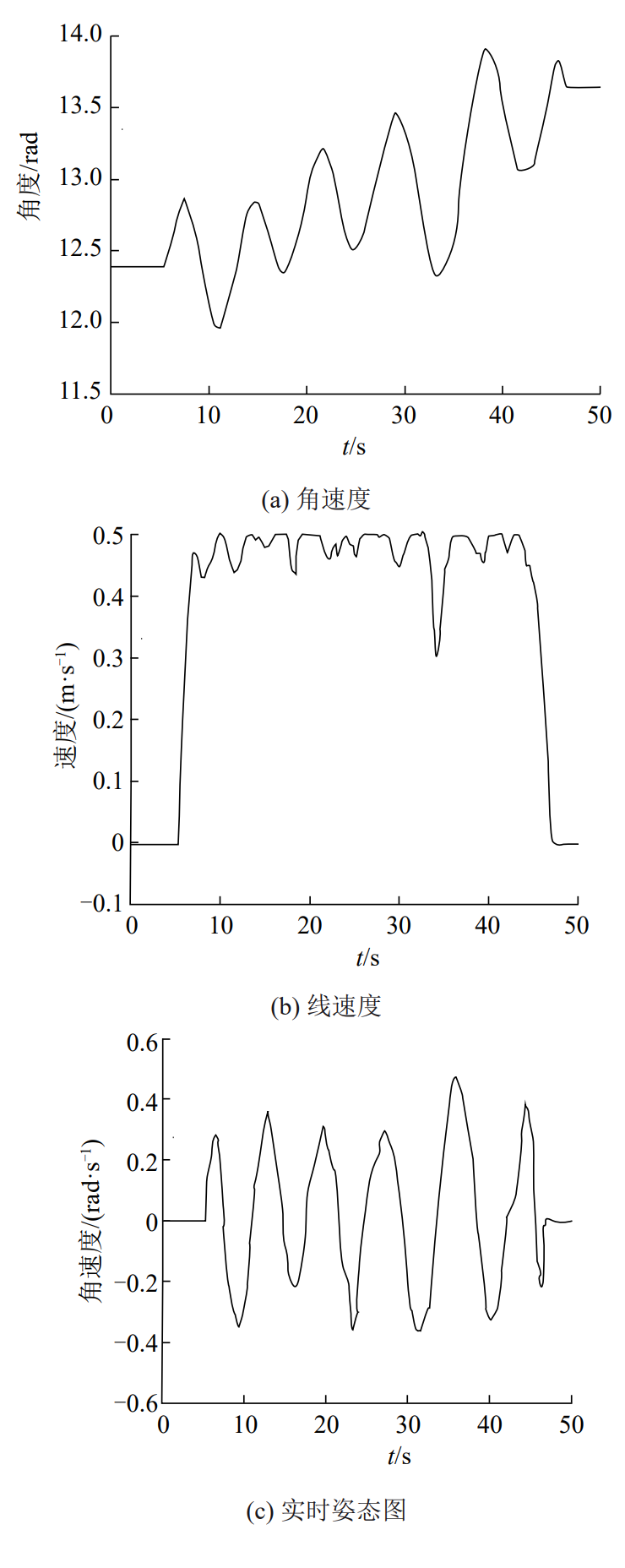
Fig. 13
Intelligent vehicle operating data
| 1 | Patle B K, Ganesh Babu L, Pandey Anish, et al. A Review: On Path Planning Strategies for Navigation of Mobile Robot[J]. Defence Technology, 2019, 15(4): 582-606. |
| 2 | Adamu Patience I, Okagbue Hilary I, Pelumi E Oguntunde. Fast and Optimal Path Planning Algorithm (FAOPPA) for a Mobile Robot[J]. Wireless Personal Communications, 2019, 106(2): 577-592. |
| 3 | 劳彩莲, 李鹏, 冯宇. 基于改进A*与DWA算法融合的温室机器人路径规划[J]. 农业机械学报, 2021, 52(1): 14-22. |
| Lao Cailian, Li Peng, Feng Yu. Path Planning of Greenhouse Robot Based on Fusion of Improved A* Algorithm and Dynamic Window Approach[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 14-22. | |
| 4 | Min Haitao, Xiong Xiaoyong, Wang Pengyu, et al. Autonomous Driving Path Planning Algorithm Based on Improved A* Algorithm in Unstructured Environment[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2/3): 513-526. |
| 5 | 段书用, 王启帆, 韩旭, 等. 具有确保安全距离的A*路径优化方法[J]. 机械工程学报, 2020, 56(18): 205-215. |
| Duan Shuyong, Wang Qifan, Han Xu, et al. Improved A-star Algorithm for Safety Insured Optimal Path with Smoothed Corner Turns[J]. Journal of Mechanical Engineering, 2020, 56(18): 205-215. | |
| 6 | Xiong Xiaoyong, Min Haitao, Yu Yuanbin, et al. Application Improvement of A* Algorithm in Intelligent Vehicle Trajectory Planning[J]. Mathematical Biosciences and Engineering, 2021, 18(1): 1-21. |
| 7 | 张瑜, 宋荆洲, 张琪祁. 基于改进动态窗口法的户外清扫机器人局部路径规划[J]. 机器人, 2020, 42(5): 617-625. |
| Zhang Yu, Song Jingzhou, Zhang Qiqi. Local Path Planning of Outdoor Cleaning Robot Based on an Improved DWA[J]. Robot, 2020, 42(5): 617-625. | |
| 8 | 王彬, 聂建军, 李海洋, 等. 优化A*与动态窗口法的移动机器人路径规划[J/OL]. 计算机集成制造系统. (2022-03-08) [2023-03-09]. . |
| Wang Bin, Nie Jianjun, Li Haiyang, et al. Based on Optimized A* and Dynamic Window Approach for Mobile Robot Path Planning[J/OL]. Computer Integrated Manufacturing Systems. (2022-03-08) [2023-03-09]. . | |
| 9 | 王志中. 复杂动态环境下自主机器人路径规划研究[J]. 组合机床与自动化加工技术, 2018(1): 64-68. |
| Wang Zhizhong. Automatic Robot Path Planning Under Complicit Dynamic Environment[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2018(1): 64-68. | |
| 10 | 王凡, 李铁军, 刘今越, 等. 基于BIM的建筑机器人自主路径规划及避障研究[J]. 计算机工程与应用, 2020, 56(17): 224-230. |
| Wang Fan, Li Tiejun, Liu Jinyue, et al. Research on Autonomous Path Planning and Obstacle Avoidance of Building Robot Based on BIM[J]. Computer Engineering and Applications, 2020, 56(17): 224-230. | |
| 11 | 徐玉琼, 娄柯, 李婷婷, 等. 改进自适应蚁群算法的移动机器人路径规划[J]. 电子测量与仪器学报, 2019, 33(10): 89-95. |
| Xu Yuqiong, Lou Ke, Li Tingting, et al. Path Planning of Mobile Robot Based on Improved Adaptive Ant Colony Algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2019, 33(10): 89-95. | |
| 12 | 张松灿, 普杰信, 司彦娜, 等. 蚁群算法在移动机器人路径规划中的应用综述[J]. 计算机工程与应用, 2020, 56(8): 10-19. |
| Zhang Songcan, Pu Jiexin, Si Yanna, et al. Survey on Application of Ant Colony Algorithm in Path Planning of Mobile Robot[J]. Computer Engineering and Applications, 2020, 56(8): 10-19. | |
| 13 | Dai Xiaolin, Long Shuai, Zhang Zhiwen, et al. Mobile Robot Path Planning Based on Ant Colony Algorithm With A* Heuristic Method[J]. Frontiers in Neurorobotics, 2019, 13: 15. |
| 14 | 曹毅, 周轶, 张亚宾. 基于优化A*和DWA算法的移动机器人避障路径规划[J]. 机床与液压, 2020, 48(24): 246-252. |
| Cao Yi, Zhou Yi, Zhang Yabin. Path Planning for Obstacle Avoidance of Mobile Robot Based on Optimized A* and DWA Algorithm[J]. Machine Tool & Hydraulics, 2020, 48(24): 246-252. | |
| 15 | 石英托, 陈华, 张连新, 等. 基于改进A*算法的AGV转运机器人路径规划研究[J]. 制造技术与机床, 2022(5): 19-22. |
| Shi Yingtuo, Chen Hua, Zhang Lianxin, et al. Research on Path Planning of AGV Transport Robot Based on Improved A* Algorithm[J]. Manufacturing Technology & Machine Tool, 2022(5): 19-22. | |
| 16 | 高鹏, 姜军生, 白阳, 等. 基于改进A*算法的果园移动机器人建图定位与路径规划方法与试验[J]. 中国农机化学报, 2022, 43(1): 142-149. |
| Gao Peng, Jiang Junsheng, Bai Yang, et al. Method and Experiment of Map Building and Path Planning for Mobile Robot in Orchard Based on Improved A* Algorithm[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(1): 142-149. | |
| 17 | 陈娇, 徐菱, 陈佳, 等. 改进A*和动态窗口法的移动机器人路径规划[J]. 计算机集成制造系统, 2022, 28(6): 1650-1658. |
| Chen Jiao, Xu Ling, Chen Jia, et al. Path Planning Based on Improved A* and Dynamic Window Approach for Mobile Robot[J]. Computer Integrated Manufacturing Systems, 2022, 28(6): 1650-1658. | |
| 18 | Xiquan Mai, Li Di, Ouyang Jian, et al. An Improved Dynamic Window Approach for Local Trajectory Planning in the Environment with Dense Objects[J]. Journal of Physics: Conference Series, 2021, 1884(1): 012003. |
| 19 | 槐创锋, 郭龙, 贾雪艳, 等. 改进A*算法与动态窗口法的机器人动态路径规划[J]. 计算机工程与应用, 2021, 57(8): 244-248. |
| Huai Chuangfeng, Guo Long, Jia Xueyan, et al. Improved A* Algorithm and Dynamic Window Method for Robot Dynamic Path Planning[J]. Computer Engineering and Applications, 2021, 57(8): 244-248. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
