

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2137-2148.doi: 10.16182/j.issn1004731x.joss.23-0543
Previous Articles Next Articles
Wang Yuelong, Wang Songyan, Chao Tao
Received:2023-05-09
Revised:2023-07-12
Online:2024-09-15
Published:2024-09-30
Contact:
Chao Tao
CLC Number:
Wang Yuelong, Wang Songyan, Chao Tao. Multi-step Information Aided Q-learning Path Planning Algorithm[J]. Journal of System Simulation, 2024, 36(9): 2137-2148.

Fig. 1
4×4 grid map
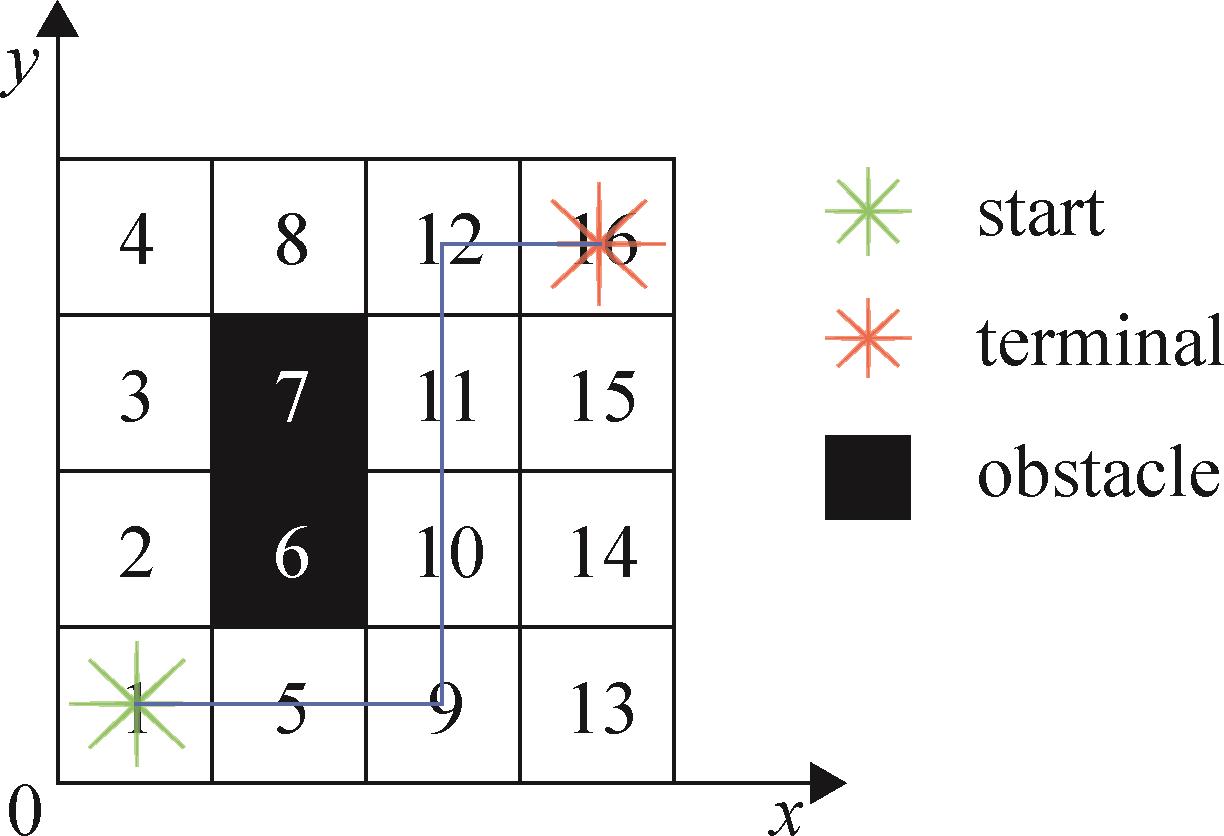
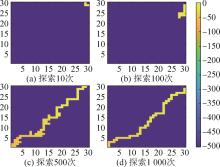
Fig. 2
Comparison of eligibility traces distribution by traditional Q(λ)
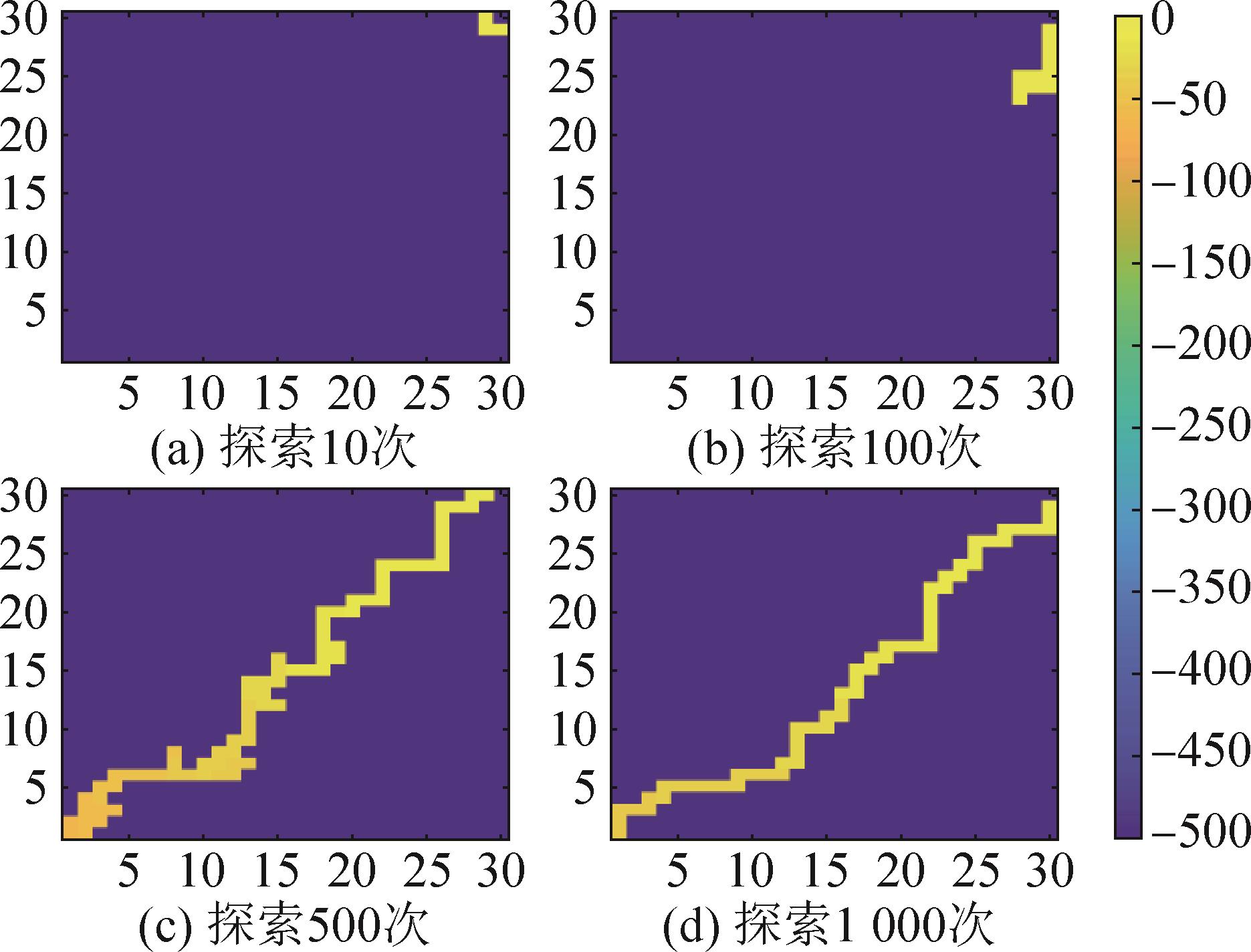
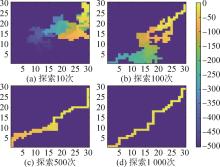
Fig. 3
Comparison of eligibility traces distribution by improved Q(λ)

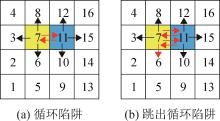
Fig. 4
Trap handling process
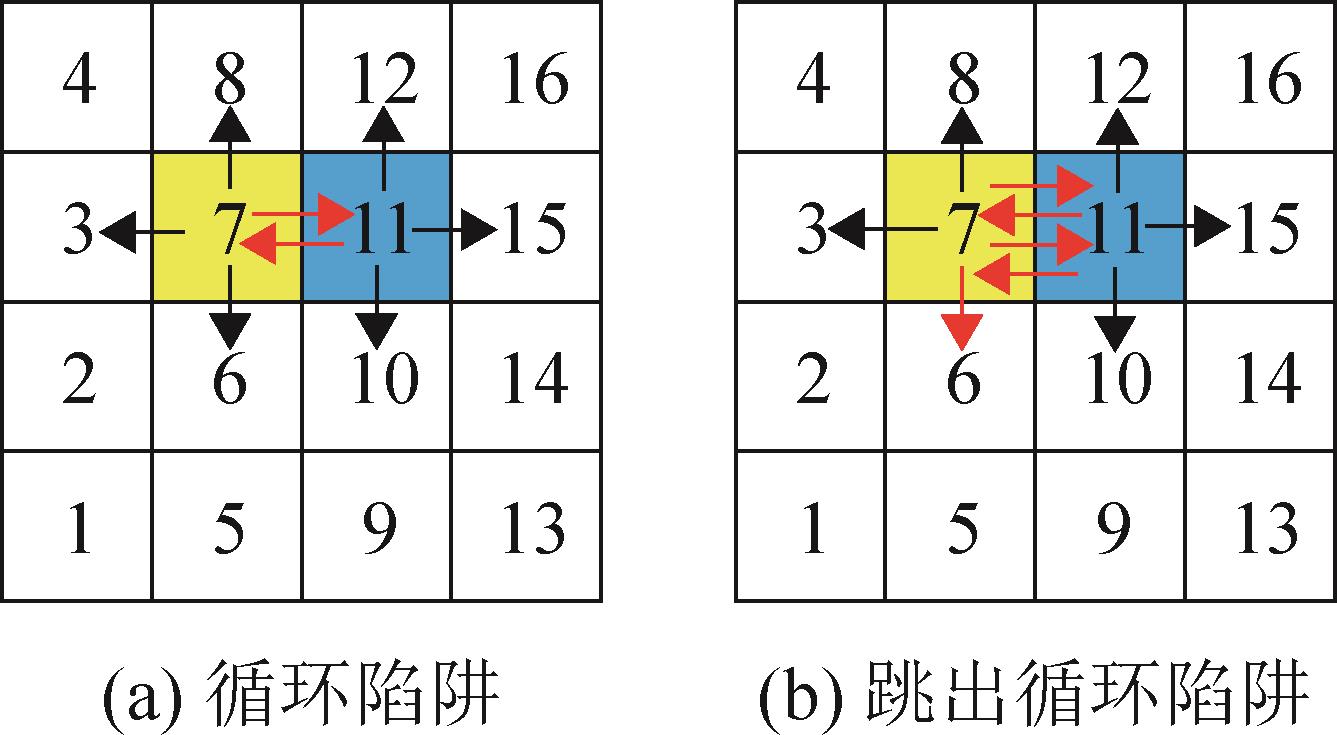
Table 1
Parameter setting
| 参数 | 数值 |
|---|---|
| 学习率α | 0.4 |
| 折扣因子γ | 0.95 |
| 探索因子初始值ε0 | 0.1 |
| 目标点回报rp | 2 |
| 障碍物回报ro | -0.2 |
| 自由行走回报rw | -0.1 |
| 最大迭代次数nmax | 10 000 |
| 最大路径长度Lmax | 1 000 |
| 收敛最大标准差smax | 1 |
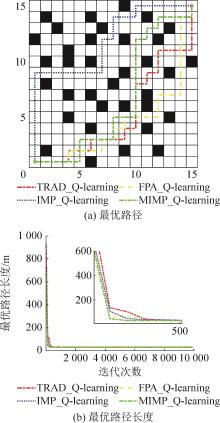
Fig. 5
Optimal path results of 4 algorithms in map I
Table 2
Performance comparison of 4 algorithms in map I
| 参数 | TRAD_Q-learning | FPA_Q-learning | IMP_Q-learning | MIMP_Q-learning |
|---|---|---|---|---|
| 最优路径长度/m | 28 | 28 | 28 | 28 |
| 改善效果/% | 0 | 0 | 0 | |
| 平均迭代次数 | 1 075.5 | 800.7 | 549.2 | 111.8 |
| 改善效果/% | 25.550 9 | 48.935 4 | 89.604 8 | |
| 平均收敛时间/s | 0.364 1 | 0.290 9 | 0.276 2 | 0.127 7 |
| 改善效果/% | 14.470 8 | 18.796 9 | 62.433 7 |

Fig. 6
Optimal path results of 4 algorithms in map II
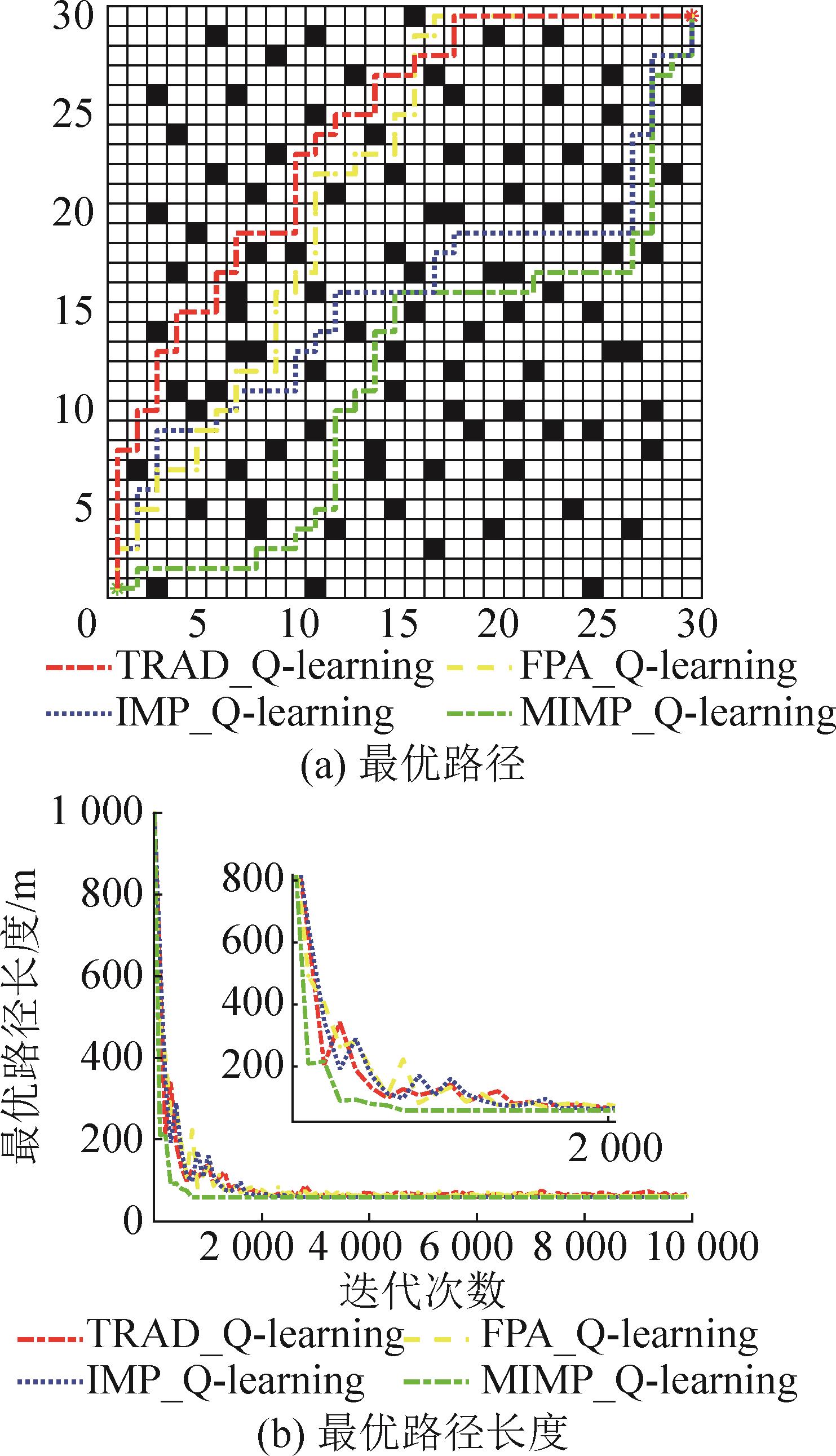
Table 3
Performance comparison of 4 algorithms in map II
| 参数 | TRAD_Q-learning | FPA_Q-learning | IMP_Q-learning | MIMP_Q-learning |
|---|---|---|---|---|
| 最优路径长度/m | 58 | 58 | 58 | 58 |
| 改善效果/% | 0 | 0 | 0 | |
| 平均迭代次数 | 7 443.0 | 6 484.9 | 2 704.2 | 562.8 |
| 改善效果/% | 12.872 5 | 63.667 9 | 92.438 5 | |
| 平均收敛时间/s | 3.189 1 | 2.851 5 | 1.882 8 | 0.972 1 |
| 改善效果/% | 10.586 3 | 40.960 7 | 69.518 5 |

Fig. 7
Optimal path results of 4 algorithms in map III
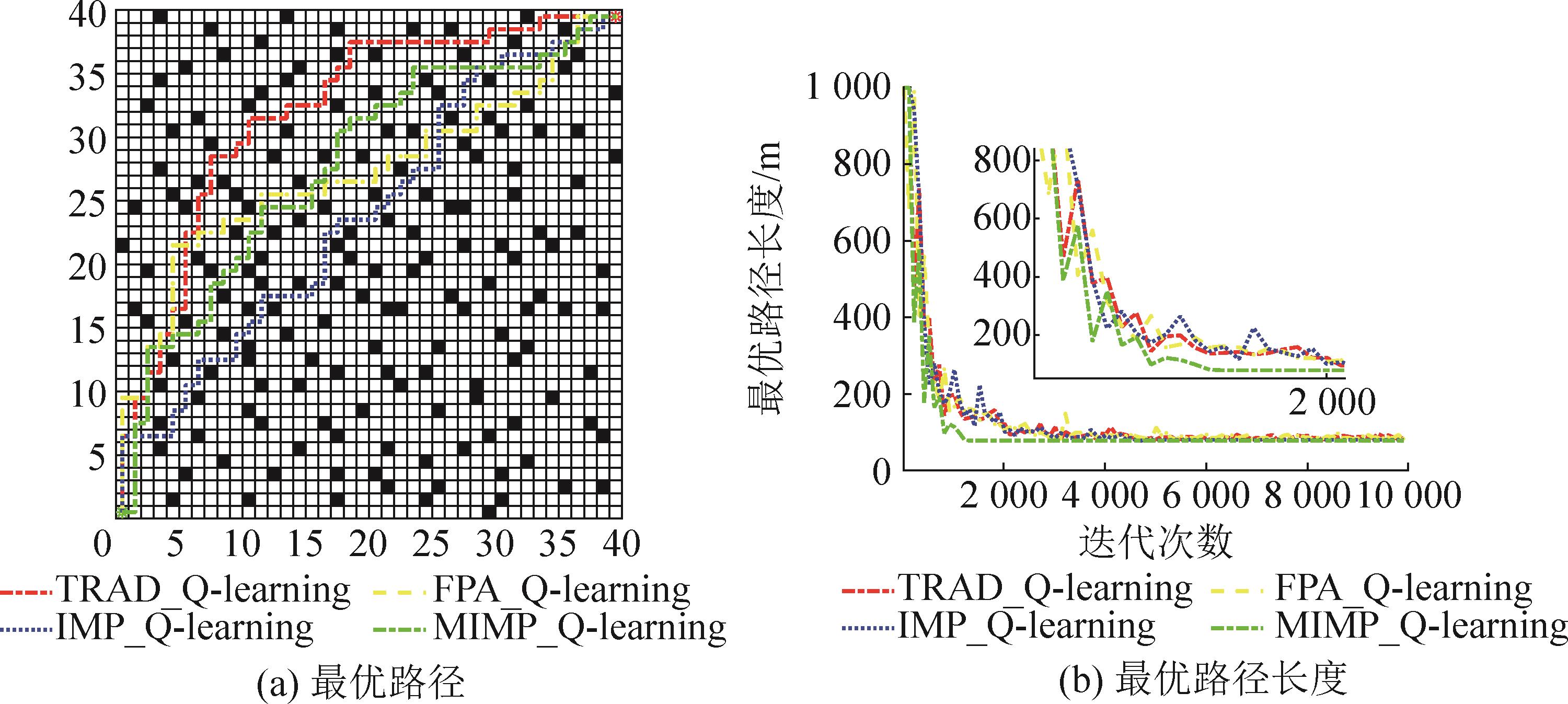
Table 4
Performance comparison of 4 algorithms in map III
| 参数 | TRAD_Q-learning | FPA_Q-learning | IMP_Q-learning | MIMP_Q-learning |
|---|---|---|---|---|
| 最优路径长度/m | 78 | 78 | 78 | 78 |
| 改善效果/% | 0 | 0 | 0 | |
| 平均迭代次数 | 10 000.0 | 9 252.2 | 4 832.3 | 1 028.7 |
| 改善效果/% | 7.478 | 51.677 | 89.713 | |
| 平均收敛时间/s | 6.266 8 | 5.612 8 | 4.361 5 | 2.570 0 |
| 改善效果/% | 10.435 9 | 30.402 7 | 58.989 8 |

Fig. 8
Optimal path results of 4 algorithms in map IV
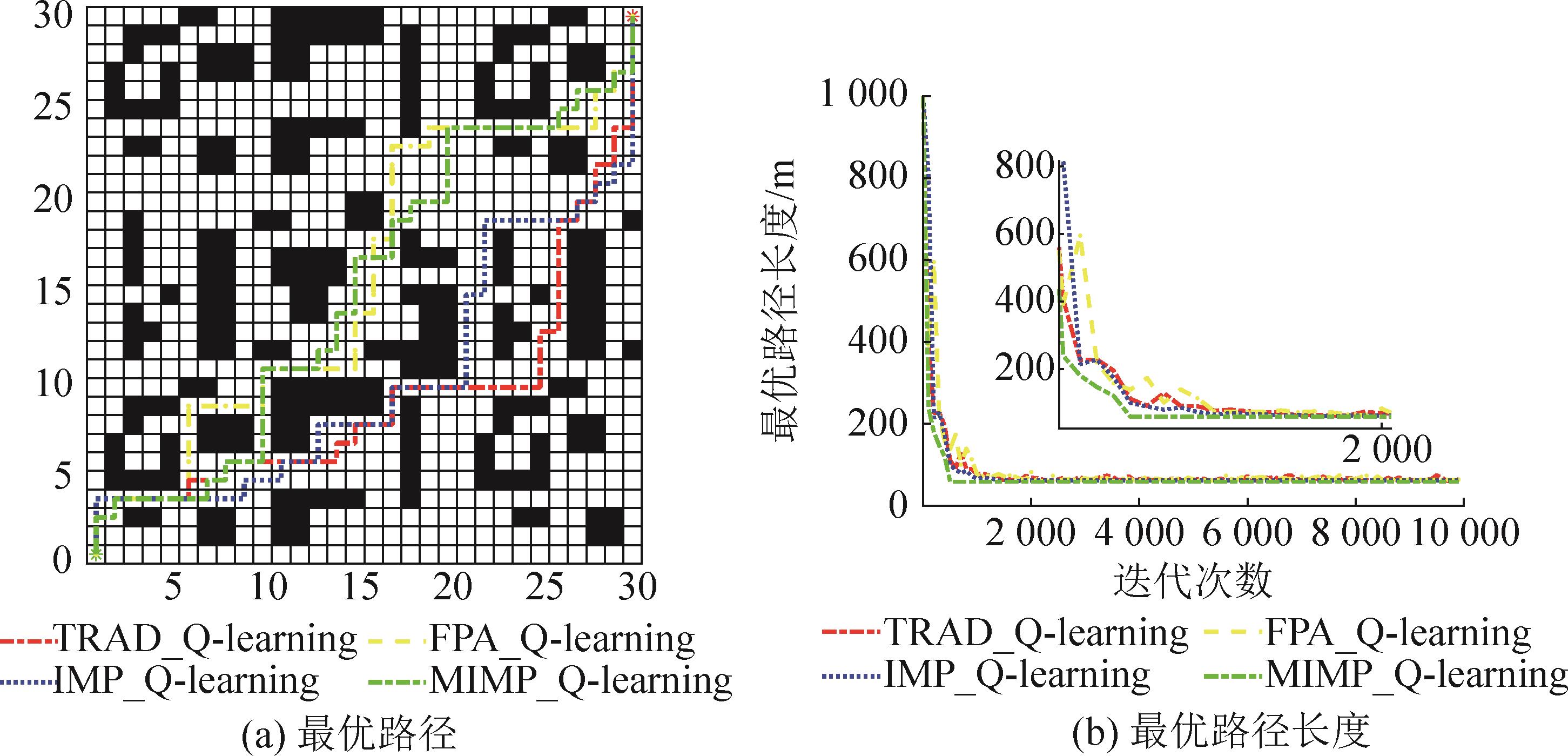
Table 5
Performance comparison of 4 algorithms in map IV
| 参数 | TRAD_Q-learning | FPA_Q-learning | IMP_Q-learning | MIMP_Q-learning |
|---|---|---|---|---|
| 最优路径长度/m | 58 | 58 | 58 | 58 |
| 改善效果/% | 0 | 0 | 0 | |
| 平均迭代次数 | 7 642.4 | 7 663.3 | 1 732.0 | 367.0 |
| 改善效果/% | -0.273 5 | 77.337 0 | 95.197 8 | |
| 平均收敛时间/s | 3.260 3 | 3.175 3 | 1.115 9 | 0.717 6 |
| 改善效果/% | 2.607 5 | 55.652 0 | 77.988 4 |

Fig. 9
Optimal path results of 4 algorithms in map V
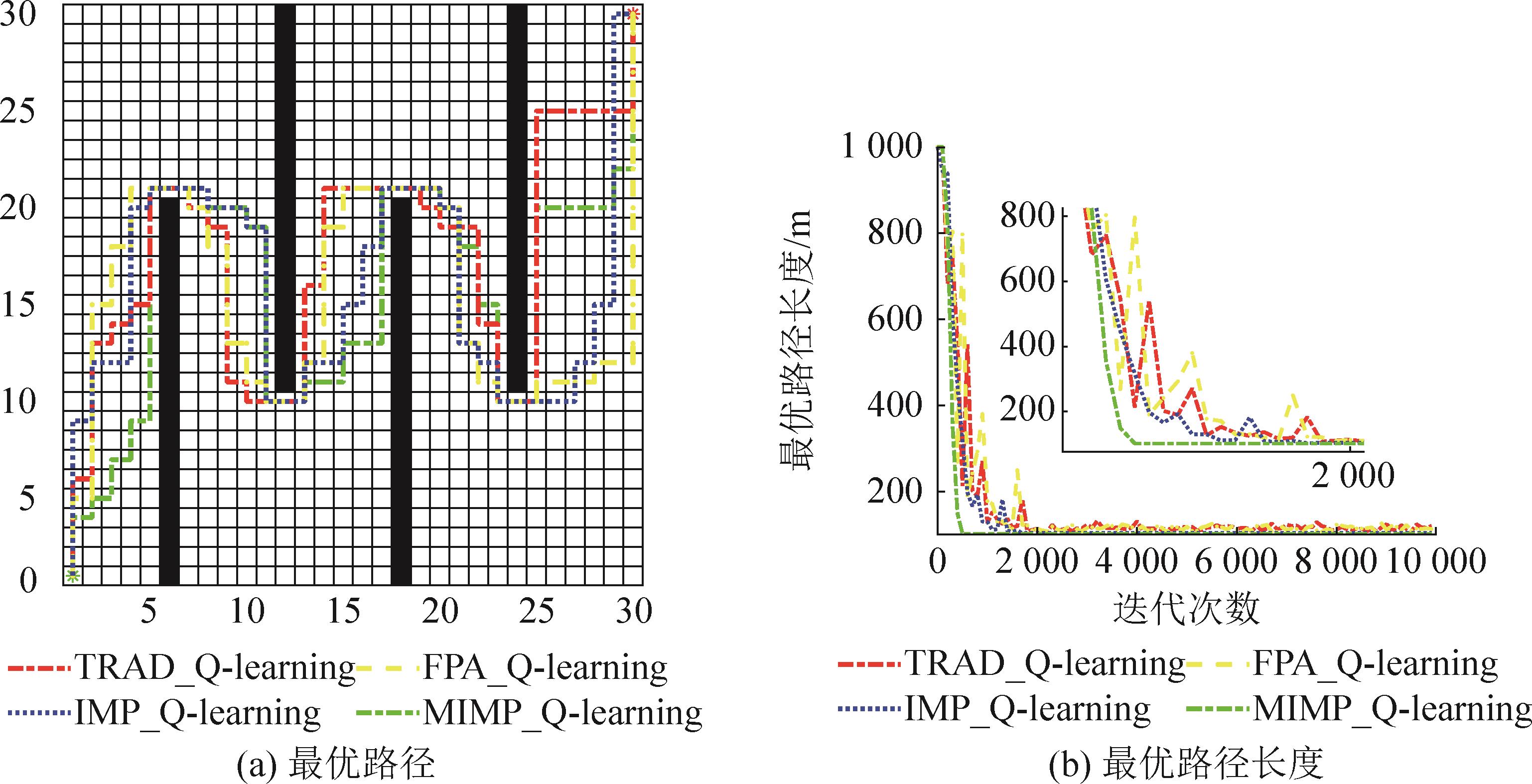
Table 6
Performance comparison of 4 algorithms in map V
| 参数 | TRAD_Q-learning | FPA_Q-learning | IMP_Q-learning | MIMP_Q-learning |
|---|---|---|---|---|
| 最优路径长度/m | 102 | 102 | 102 | 102 |
| 改善效果/% | 0 | 0 | 0 | |
| 平均迭代次数 | 10 000.0 | 10 000.0 | 1 803.4 | 408.1 |
| 改善效果/% | 0 | 81.966 | 95.919 | |
| 平均收敛时间/s | 6.561 5 | 6.789 7 | 2.684 7 | 1.628 0 |
| 改善效果/% | -3.477 7 | 59.084 7 | 75.188 3 |
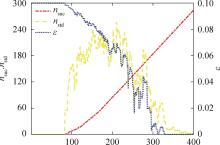
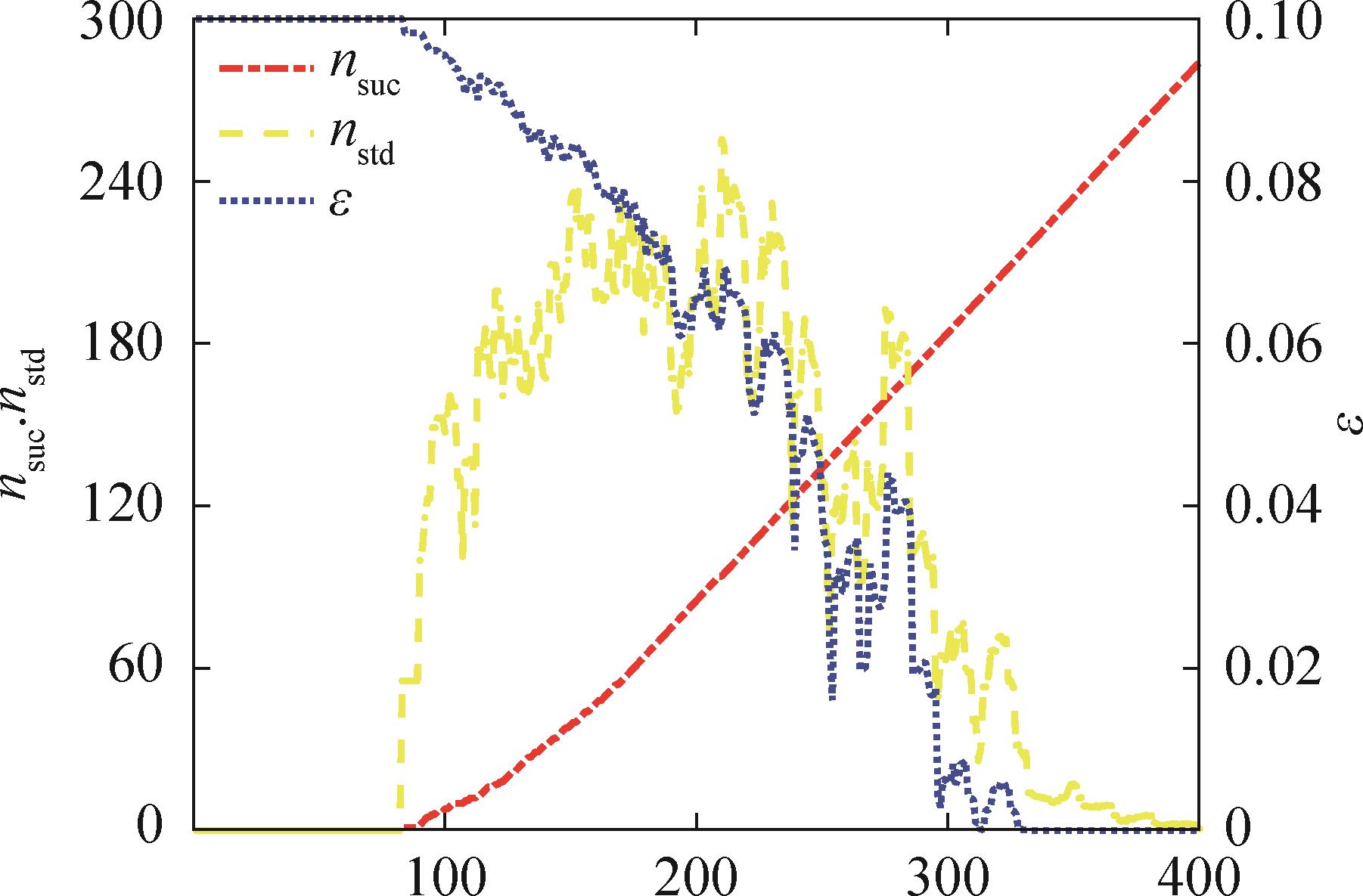
Fig. 10
Process of factors change in improved action selection strategy
| 1 | 林韩熙, 向丹, 欧阳剑, 等. 移动机器人路径规划算法的研究综述[J]. 计算机工程与应用, 2021, 57(18): 38-48. |
| Lin Hanxi, Xiang Dan, Ouyang Jian, et al. Review of Path Planning Algorithms for Mobile Robots[J]. Computer Engineering and Applications, 2021, 57(18): 38-48. | |
| 2 | Tan Bin, Peng Yinyin, Lin Jiugen. A Local Path Planning Method Based on Q-learning[C]//2021 International Conference on Signal Processing and Machine Learning (CONF-SPML). Piscataway, NJ, USA: IEEE, 2021: 80-84. |
| 3 | 徐晓苏, 袁杰. 基于改进强化学习的移动机器人路径规划方法[J]. 中国惯性技术学报, 2019, 27(3): 314-320. |
| Xu Xiaosu, Yuan Jie. Path Planning for Mobile Robot Based on Improved Reinforcement Learning Algorithm[J]. Journal of Chinese Inertial Technology, 2019, 27(3): 314-320. | |
| 4 | Ee Soong Low, Ong Pauline, Kah Chun Cheah. Solving the Optimal Path Planning of a Mobile Robot Using Improved Q-learning[J]. Robotics and Autonomous Systems, 2019, 115: 143-161. |
| 5 | 毛国君, 顾世民. 改进的Q-Learning算法及其在路径规划中的应用[J]. 太原理工大学学报, 2021, 52(1): 91-97. |
| Mao Guojun, Gu Shimin. An Improved Q-learning Algorithm and Its Application in Path Planning[J]. Journal of Taiyuan University of Technology, 2021, 52(1): 91-97. | |
| 6 | 田晓航, 霍鑫, 周典乐, 等. 基于蚁群信息素辅助的Q学习路径规划算法[J]. 控制与决策, 2023, 38(12): 3345-3353. |
| Tian Xiaohang, Huo Xin, Zhou Dianle, et al. Ant Colony Pheromone Aided Q-learning Path Planning Algorithm[J]. Control and Decision, 2023, 38(12): 3345-3353. | |
| 7 | Peng Jing, Williams R J. Incremental Multi-step Q-learning[J]. Machine Learning, 1996, 22(1): 283-290. |
| 8 | 唐恒亮, 唐滋芳, 董晨刚, 等. 基于启发式强化学习的AGV路径规划[J]. 北京工业大学学报, 2021, 47(8): 895-903. |
| Tang Hengliang, Tang Zifang, Dong Chengang, et al. AGV Path Planning Based on Heuristic Reinforcement Learning[J]. Journal of Beijing University of Technology, 2021, 47(8): 895-903. | |
| 9 | 付虹, 王国志, 柯坚, 等. 基于启发式Q(λ)学习的铁路绝缘子定位研究[J]. 铁道标准设计, 2018, 62(4): 151-155. |
| Fu Hong, Wang Guozhi, Ke Jian, et al. Research on Location of Railway Insulators Based on Heuristic Q(λ) Learning[J]. Railway Standard Design, 2018, 62(4): 151-155. | |
| 10 | 闫丰亭, 贾金原. DP-Q(λ):大规模Web3D场景中Multi-agent实时路径规划算法[J]. 系统仿真学报, 2019, 31(1): 16-26. |
| Yan Fengting, Jia Jinyuan. DP-Q(λ): Real-time Path Planning for Multi-agent in Large-scale Web3D Scene[J]. Journal of System Simulation, 2019, 31(1): 16-26. | |
| 11 | 余涛, 王宇名, 甄卫国, 等. 基于多步回溯Q学习的自动发电控制指令动态优化分配算法[J]. 控制理论与应用, 2011, 28(1): 58-64. |
| Yu Tao, Wang Yuming, Zhen Weiguo, et al. Multi-step Backtrack Q-learning Based Dynamic Optimal Algorithm for Auto Generation Control Order Dispatch[J]. Control Theory & Applications, 2011, 28(1): 58-64. | |
| 12 | 傅启明, 刘全, 王辉, 等. 一种基于线性函数逼近的离策略Q(λ)算法[J]. 计算机学报, 2014, 37(3): 677-686. |
| Fu Qiming, Liu Quan, Wang Hui, et al. A Novel off Policy Q(λ) Algorithm Based on Linear Function Approximation[J]. Chinese Journal of Computers, 2014, 37(3): 677-686. | |
| 13 | 陈圣磊, 吴慧中, 肖亮, 等. 基于Metropolis准则的多步Q学习算法与性能仿真[J]. 系统仿真学报, 2007, 19(6): 1284-1287. |
| Chen Shenglei, Wu Huizhong, Xiao Liang, et al. Metropolis Policy-based Multi-step Q learning Algorithm and Performance Simulation[J]. Journal of System Simulation, 2007, 19(6): 1284-1287. | |
| 14 | 刘仕超. 基于强化学习的移动机器人路径规划研究[D]. 青岛: 山东科技大学, 2017. |
| Liu Shichao. The Research of Mobile Robot Patn Planning Based on Reinforcement Learning[D]. Qingdao: Shandong University of Science and Technology, 2017. | |
| 15 | 李涛, 赵宏生. 基于进化蚁群算法的移动机器人路径优化[J]. 控制与决策, 2023, 38(3): 612-620. |
| Li Tao, Zhao Hongsheng. Path Optimization for Mobile Robot Based on Evolutionary Ant Colony Algorithm[J]. Control and Decision, 2023, 38(3): 612-620. | |
| 16 | 汪荣贵, 杨娟, 薛丽霞. 机器学习及其应用[M]. 北京: 机械工业出版社, 2019. |
| 17 | 余涛, 胡细兵, 刘靖. 基于多步回溯Q(λ)学习算法的多目标最优潮流计算[J]. 华南理工大学学报(自然科学版), 2010, 38(10): 139-145. |
| Yu Tao, Hu Xibing, Liu Jing. Multi-objective Optimal Power Flow Calculation Based on Multi-step Q(λ) Learning Algorithm[J]. Journal of South China University of Technology(Natural Science Edition), 2010, 38(10): 139-145. | |
| 18 | 马朋委. Q_learning强化学习算法的改进及应用研究[D]. 淮南: 安徽理工大学, 2016. |
| Ma Pengwei. The Improvement and Application of Reinforcement Learning Algorithm Research[D]. Huainan: Anhui University of Science& Technology, 2016. | |
| 19 | Yang Xinshe. Flower Pollination Algorithm for Global Optimization[C]//The 11th International Conference on Unconventional Computation and Natural Computation. Berlin, Heidelberg: Springer Berlin Heidelberg, 2012: 240-249. |
| 20 | Sutton R S, Barto A G. Reinforcement Learning: An Introduction[M]. 2nd ed. Cambridge: The MIT Press, 2018. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
