

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (5): 957-970.doi: 10.16182/j.issn1004731x.joss.22-0002
• Papers • Previous Articles Next Articles
Dalei Song1,2( ), Wenhao Gan1, Yingzhi Xu3, Xiuqing Qu1, Jiangli Cao4()
), Wenhao Gan1, Yingzhi Xu3, Xiuqing Qu1, Jiangli Cao4()
Received:2022-01-03
Revised:2022-02-10
Online:2023-05-30
Published:2023-05-22
Contact:
Jiangli Cao
E-mail:songdalei@ouc.edu.cn;jlcao_wh@163.com
CLC Number:
Dalei Song, Wenhao Gan, Yingzhi Xu, Xiuqing Qu, Jiangli Cao. Simulation of Real-Time Path Planning and Formation Control for Unmanned Surface Vessel[J]. Journal of System Simulation, 2023, 35(5): 957-970.
Fig. 1
USV model used in this paper
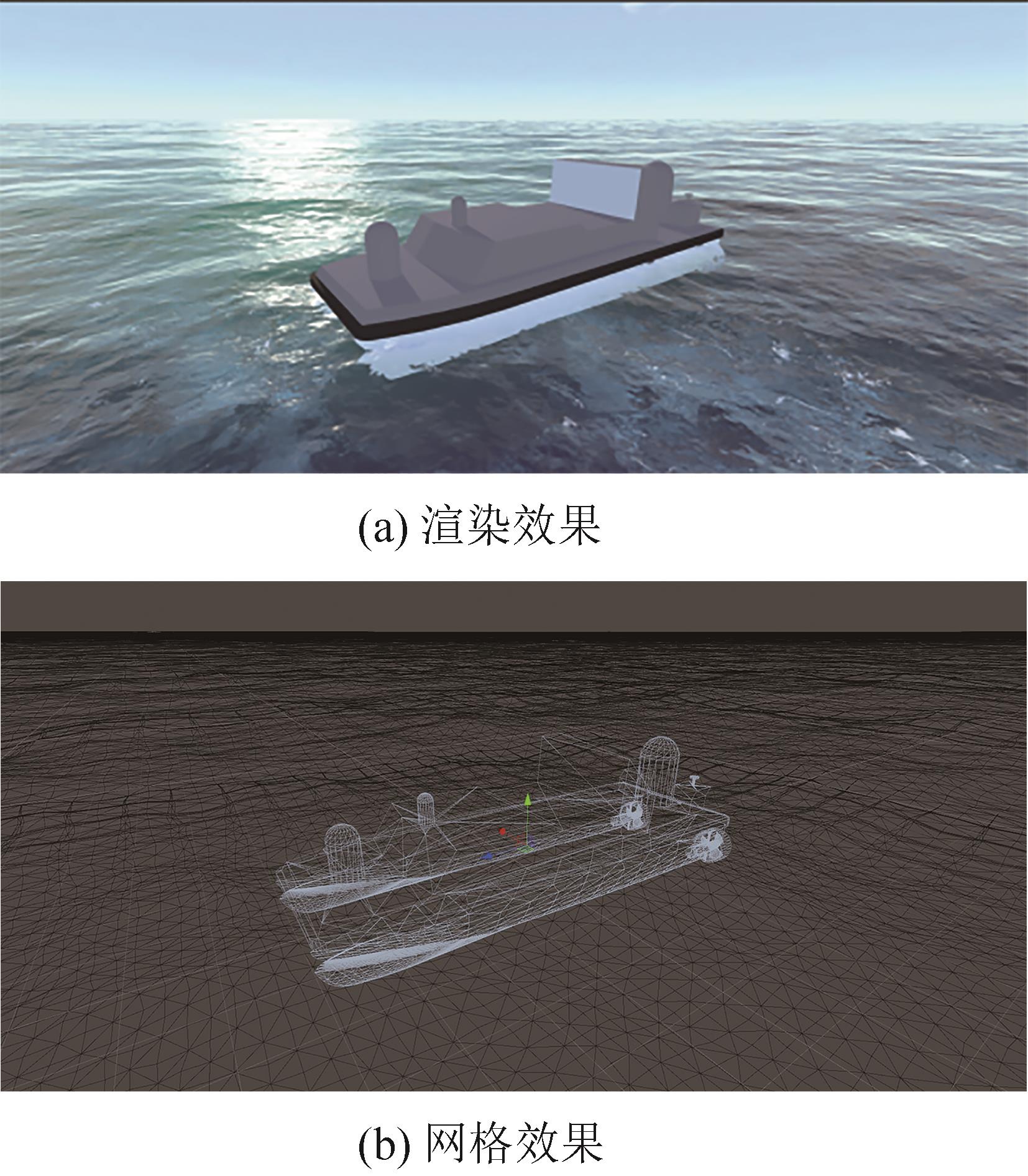
Table 1
USV model parameters
| 参数 | 取值 |
|---|---|
| 总长/m | 7.970 |
| 设计水线长/m | 7.443 |
| 总宽/m | 2.980 |
| 型宽/m | 2.880 |
| 总高/m | 2.400 |
| 正常排水量/t | 4.665 |
| 正常排水吃水/m | 0.512 |
Fig. 2
Diagram of USV coordinate system
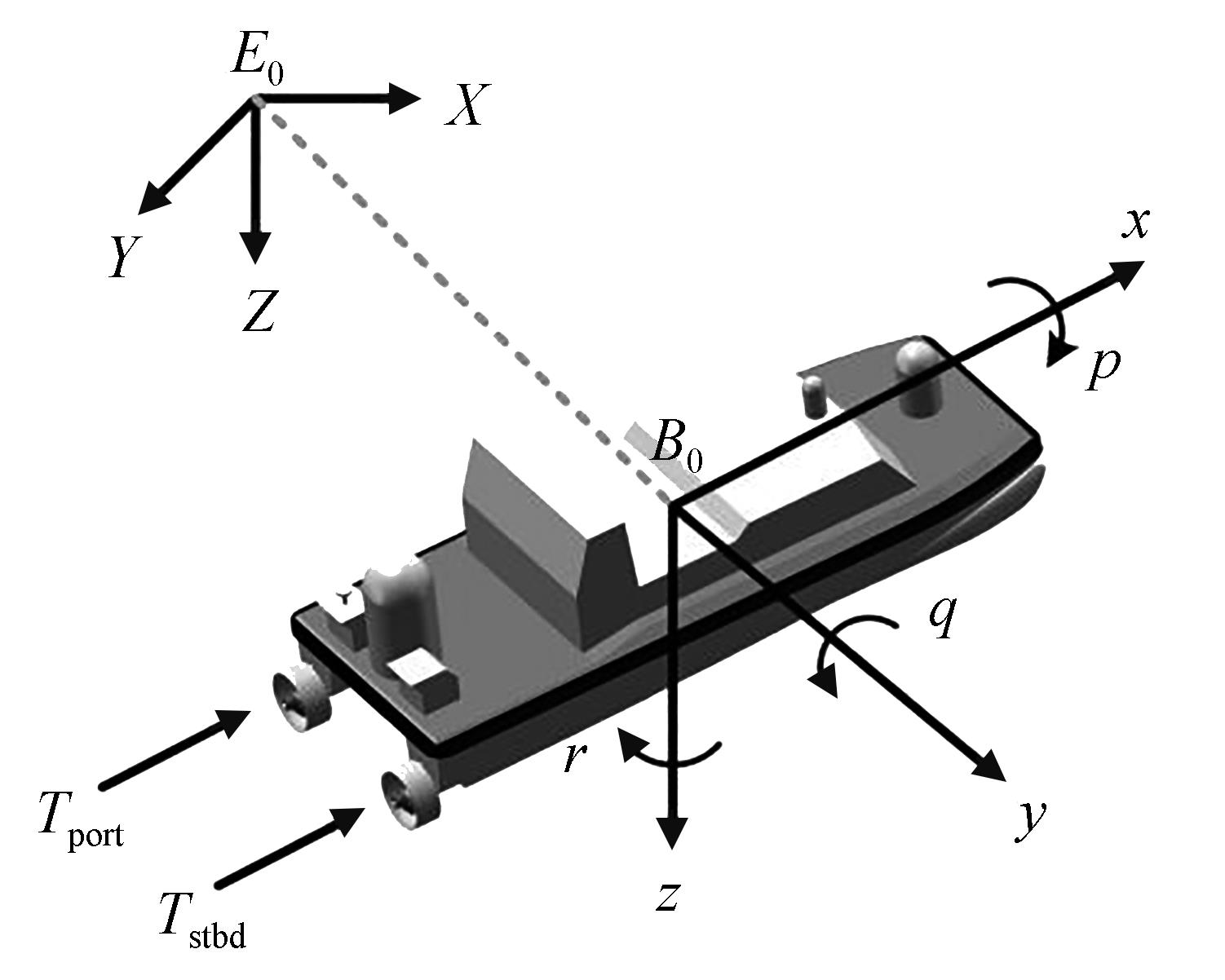
Table 2
Coordinate variables of USV
| 名称 | 描述 | B0中的速度 | E0中的位姿 | 名称 | 描述 | B0中的速度 | E0中的位姿 |
|---|---|---|---|---|---|---|---|
| 进退(surge) | 沿x轴的直线运动 | u | x | 横滚(roll) | 沿x轴的转动 | p | φ |
| 侧移(sway) | 沿y轴的直线运动 | v | y | 纵倾(pitch) | 沿y轴的转动 | q | θ |
| 起浮(heave) | 沿z轴的直线运动 | w | z | 回转(yaw) | 沿z轴的转动 | r | ψ |
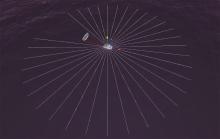
Fig. 3
Laser sensors on USV
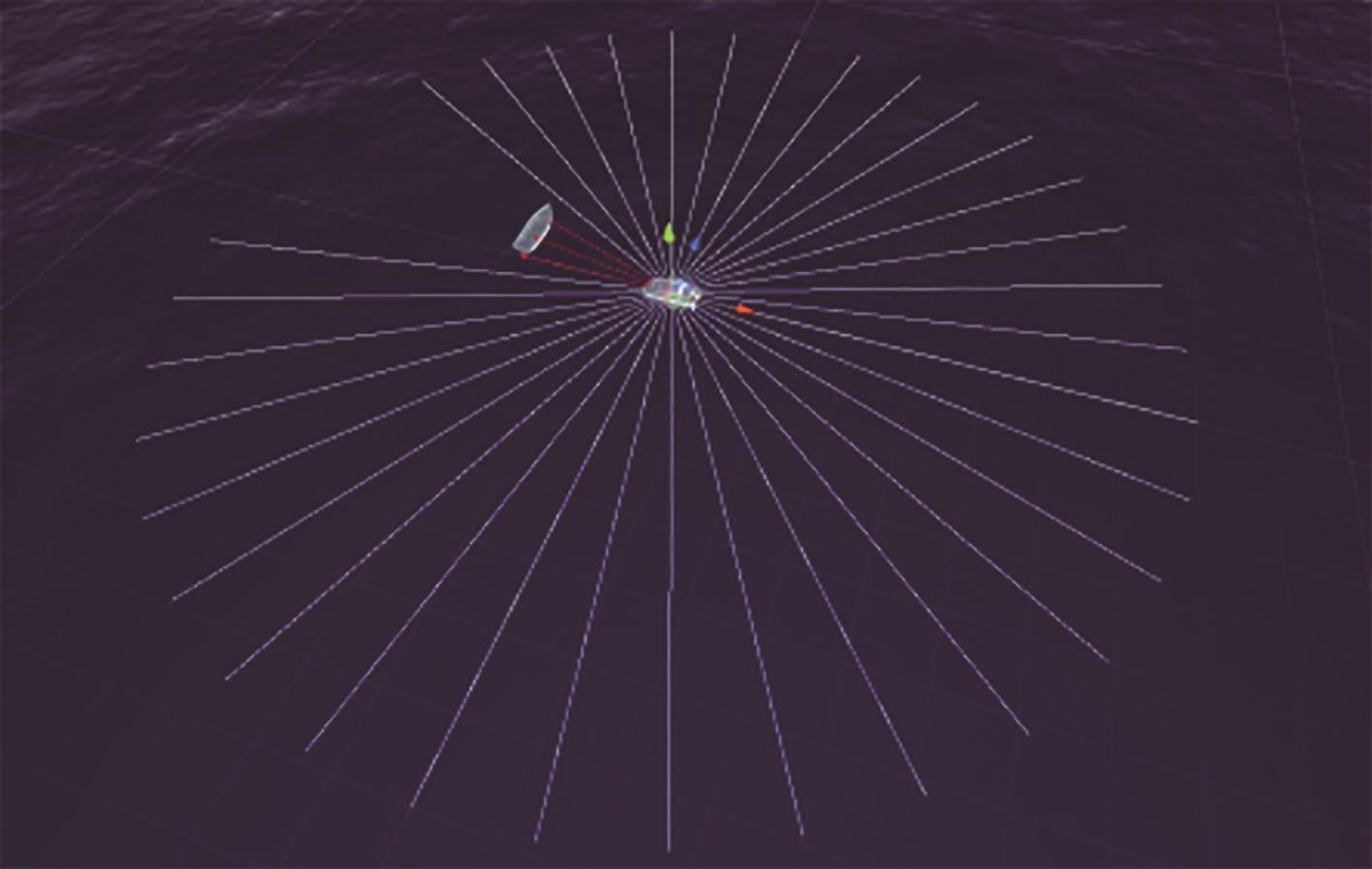
Table 3
Simplified shipboard laser sensor information
| 描述 | 取值 |
|---|---|
| 视野宽度(°) | 360 |
| 有效量程/m | 100 |
| 距离分辨率/cm | 1 |
| 角度分辨率(°) | 20 |
| 扫描频率/Hz | 25 |

Fig. 4
Path planning and tracking diagram
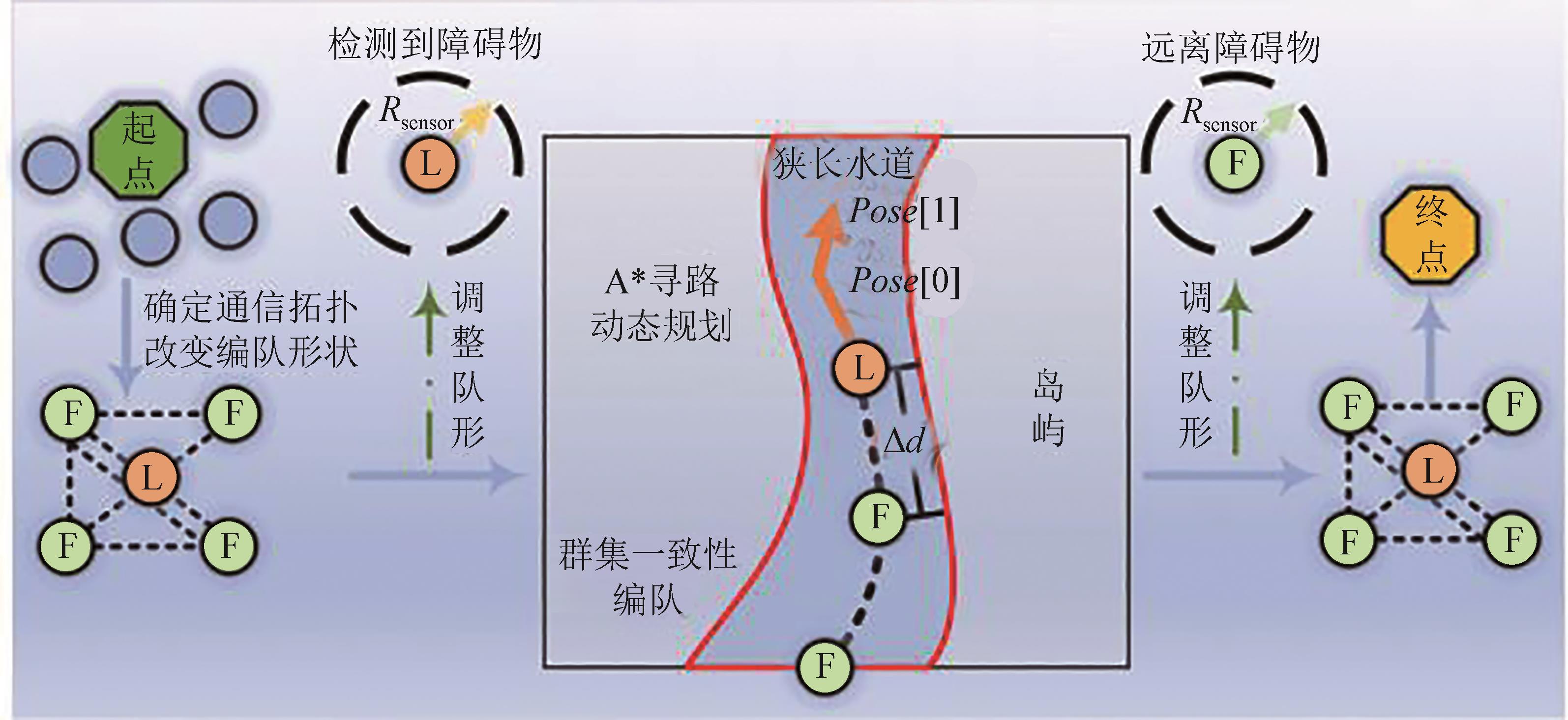

Fig. 5
Obstacle avoidance strategy diagram of USV
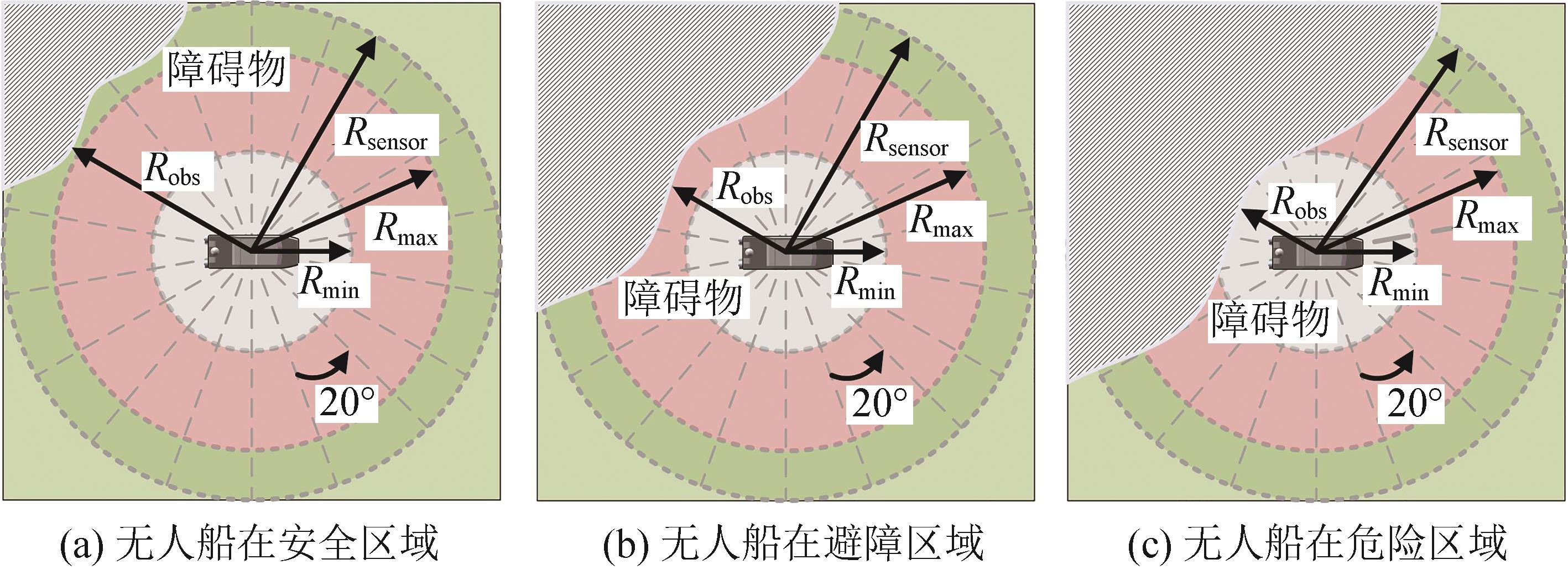
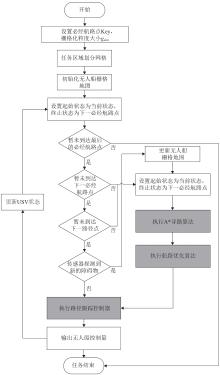
Fig. 6
Flow chart of path replanning and tracking
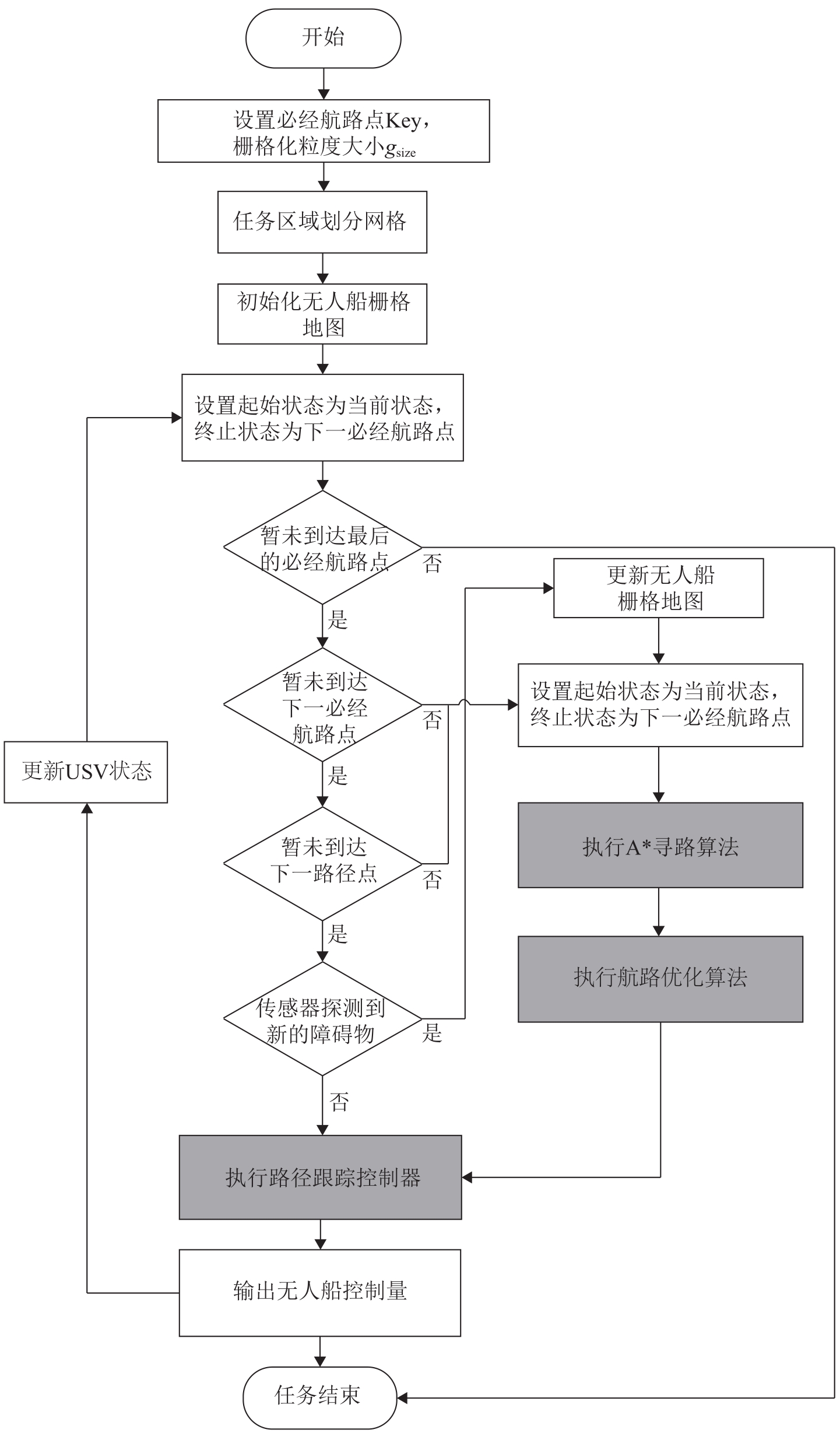

Fig. 7
Double closed-loop control strategy
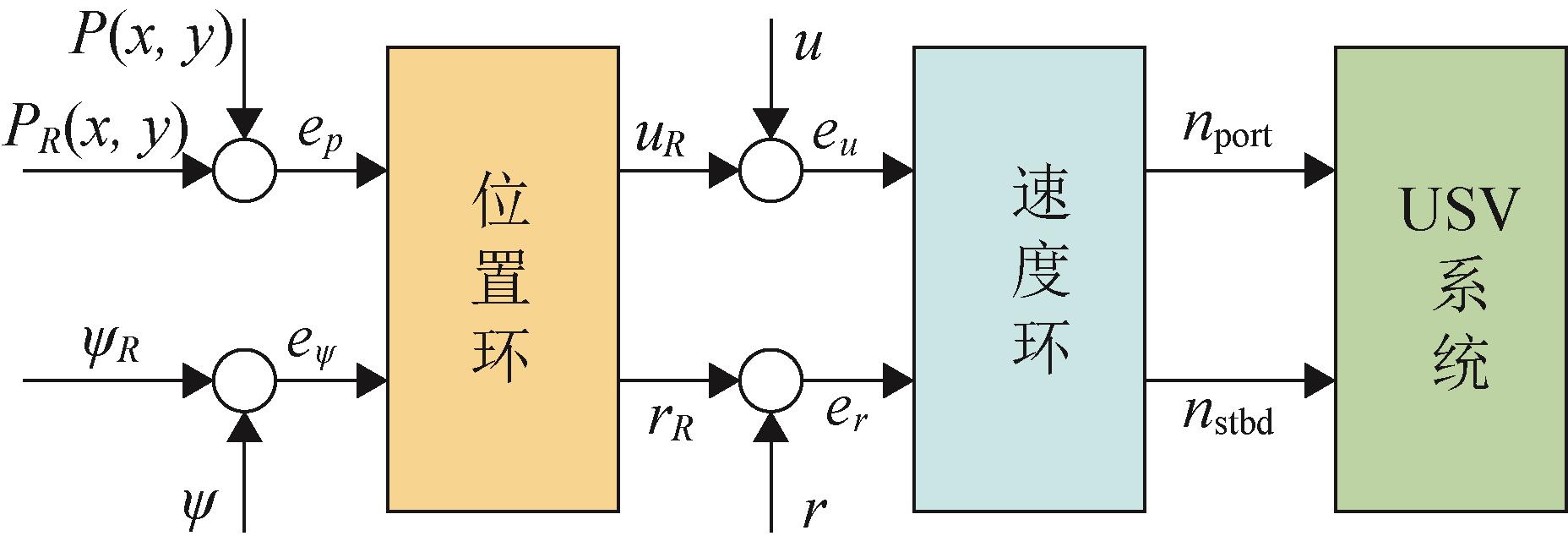
Fig. 8
Simulation results under different wind speeds
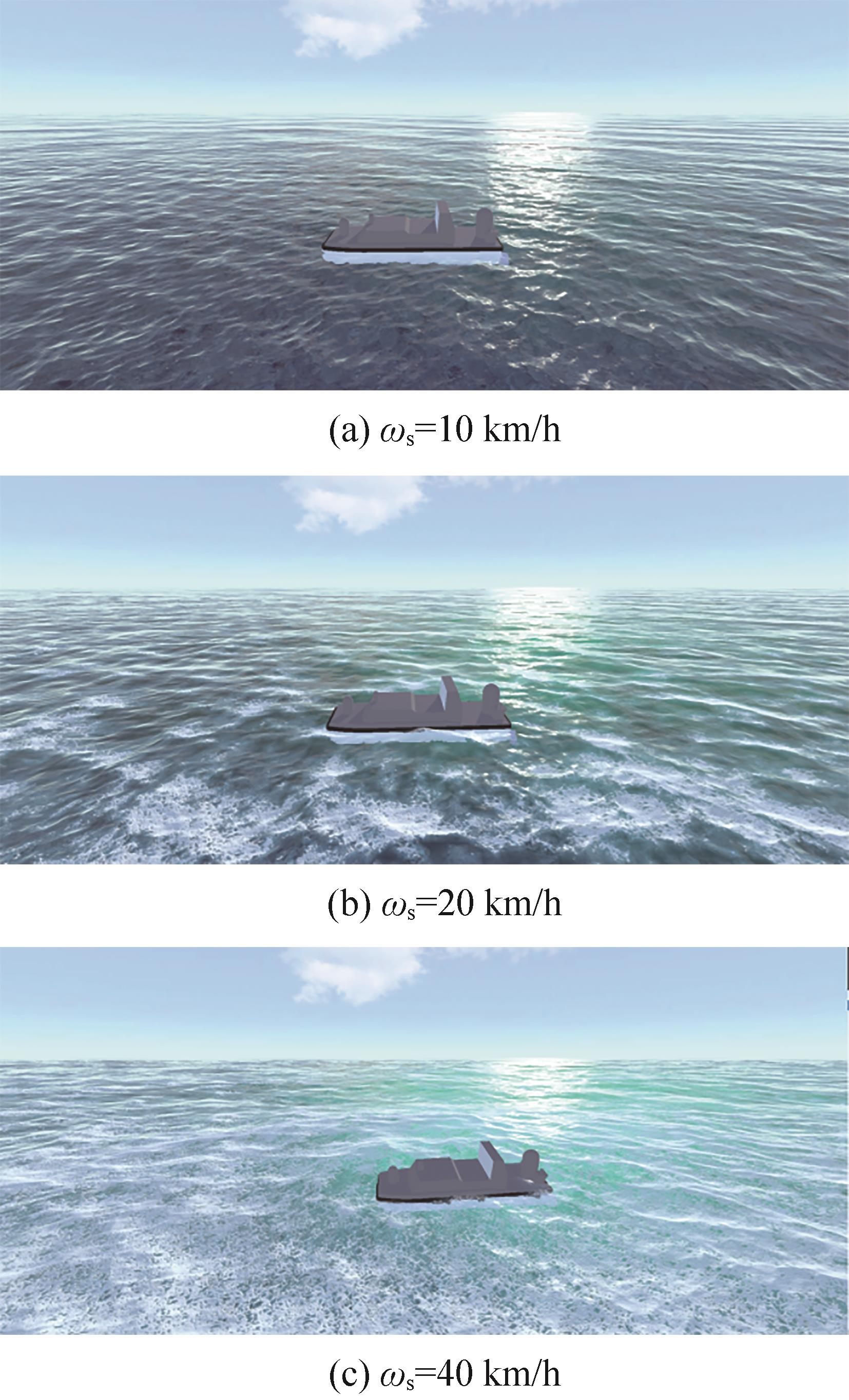

Fig. 9
USV motion state changes under different wind speeds
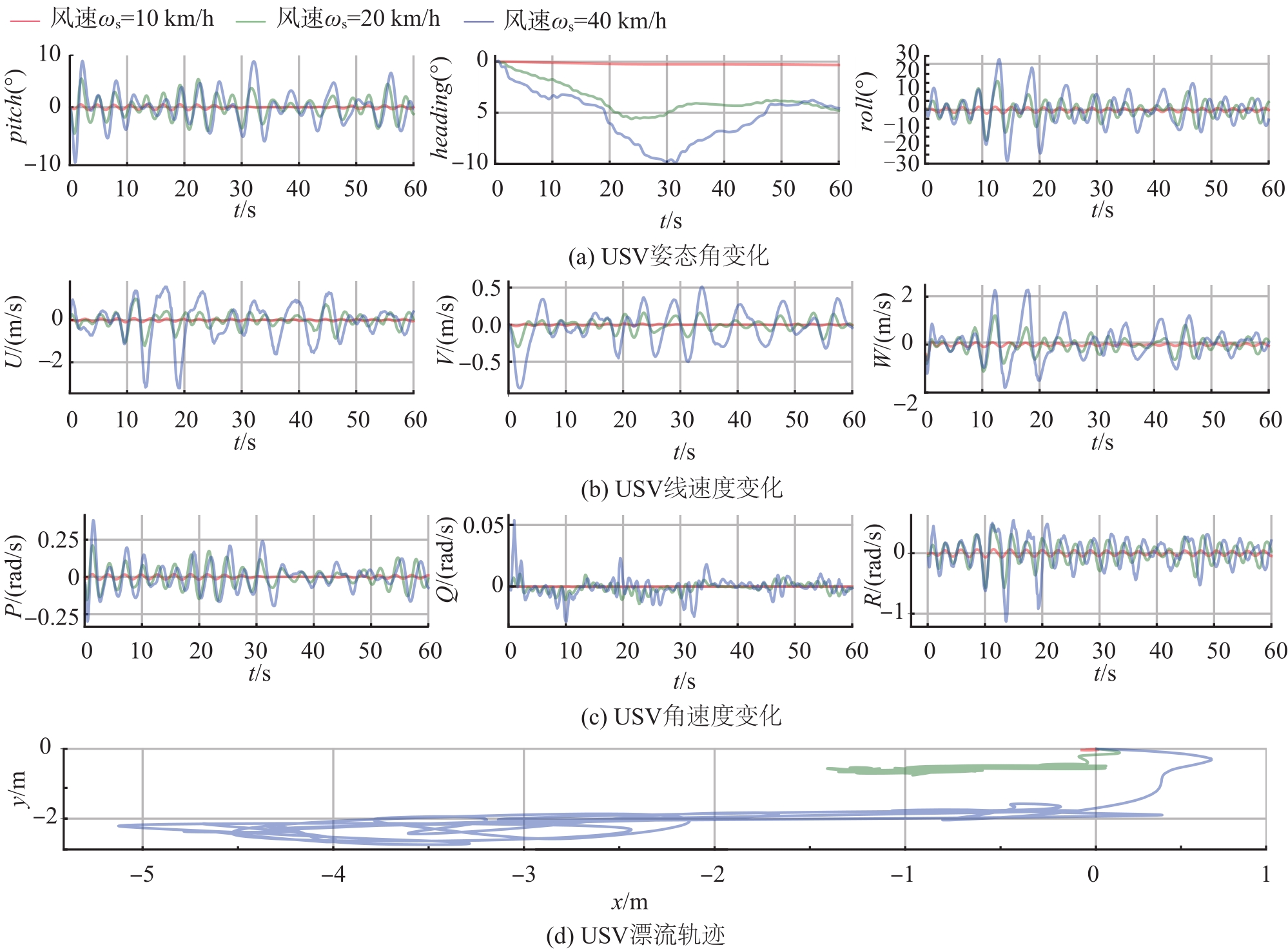

Fig. 10
Wave changes at the center of USV under different wind speeds
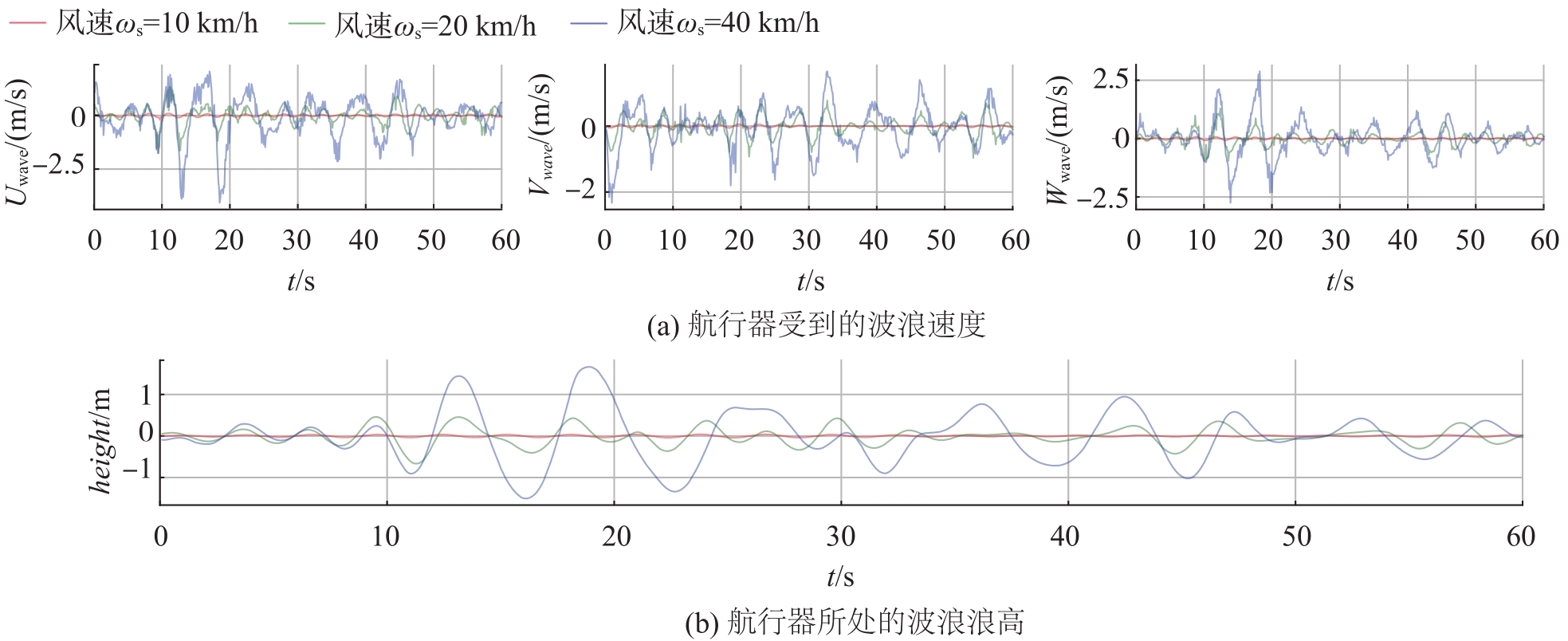
Table 4
Initial status of USV fleet
| 无人船 | 起始位置/m | 起始相位/(°) |
|---|---|---|
| 领航者 | (110, 60) | -90 |
| 1号跟随者 | (30, 100) | -180 |
| 2号跟随者 | (160, 70) | -135 |
| 3号跟随者 | (40, 40) | -180 |
| 4号跟随者 | (70, 40) | -90 |
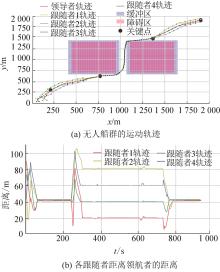
Fig. 11
Path planning and formation simulation of USV passing narrow waterway
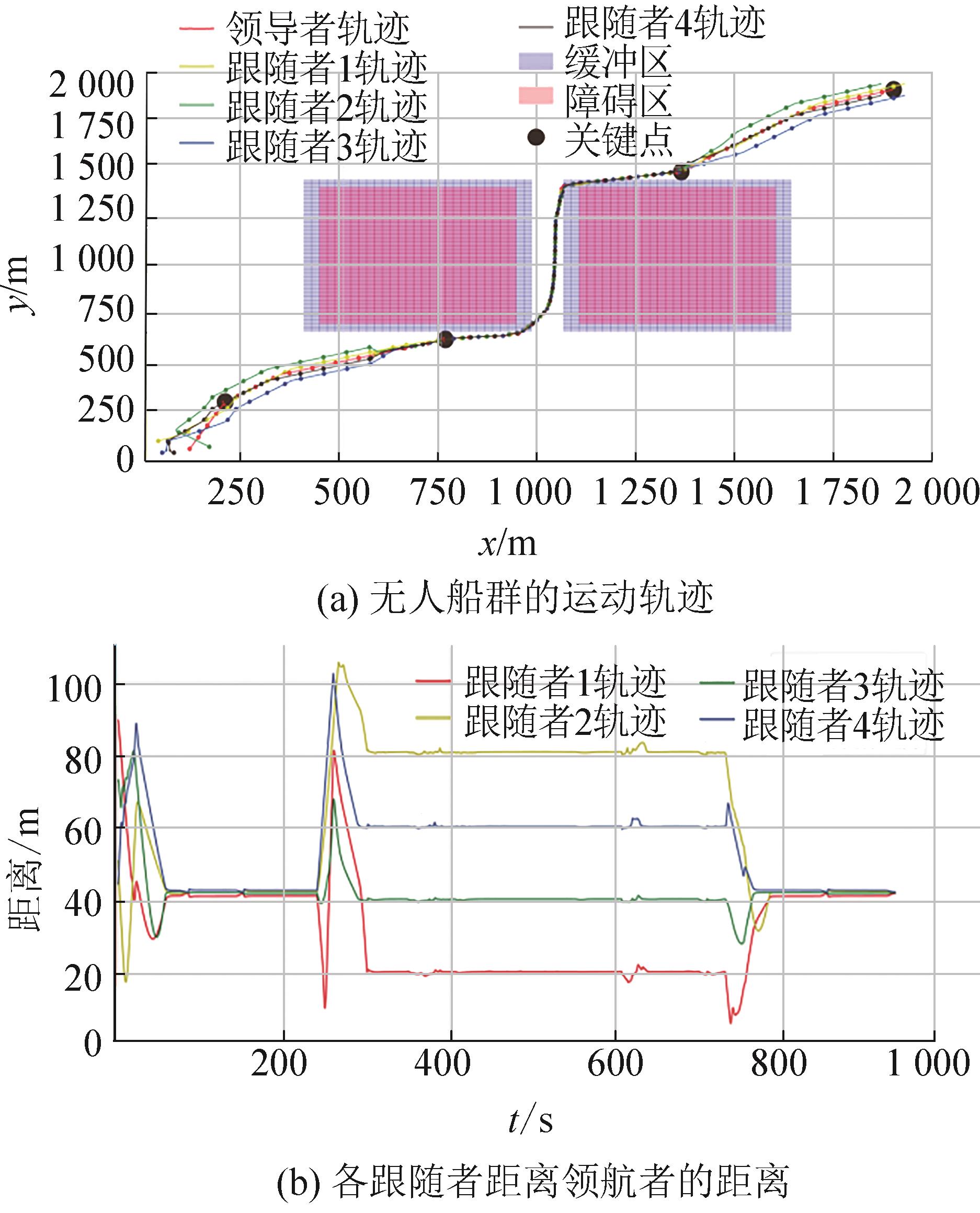
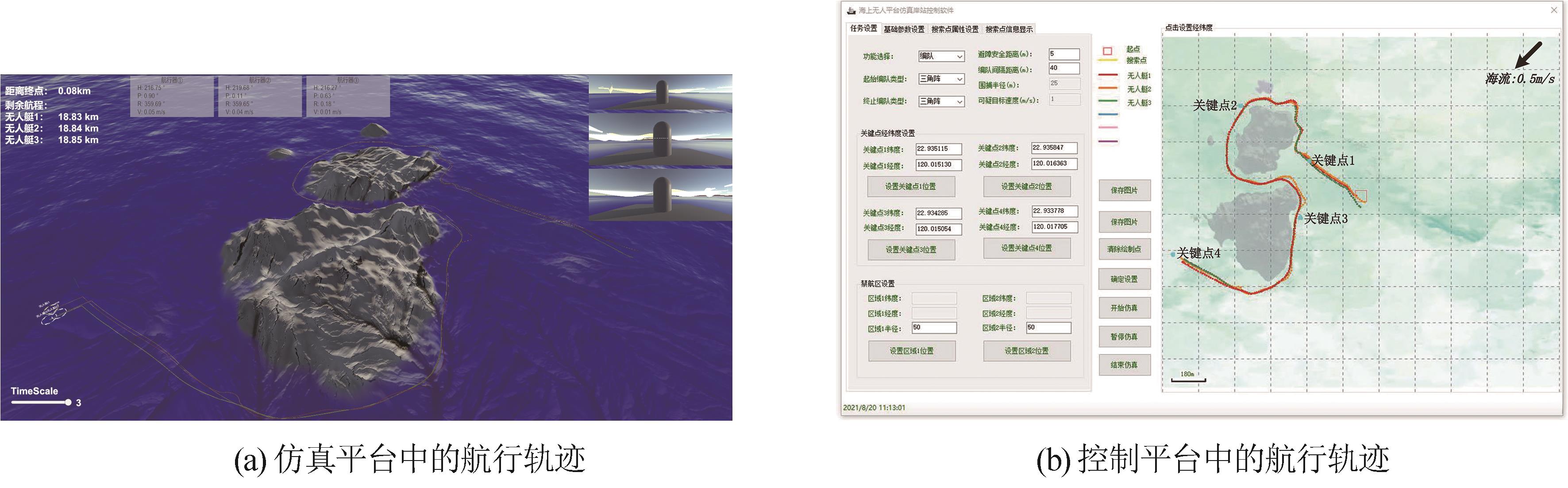
Fig. 12
Path planning and formation simulation of USV in archipelago area
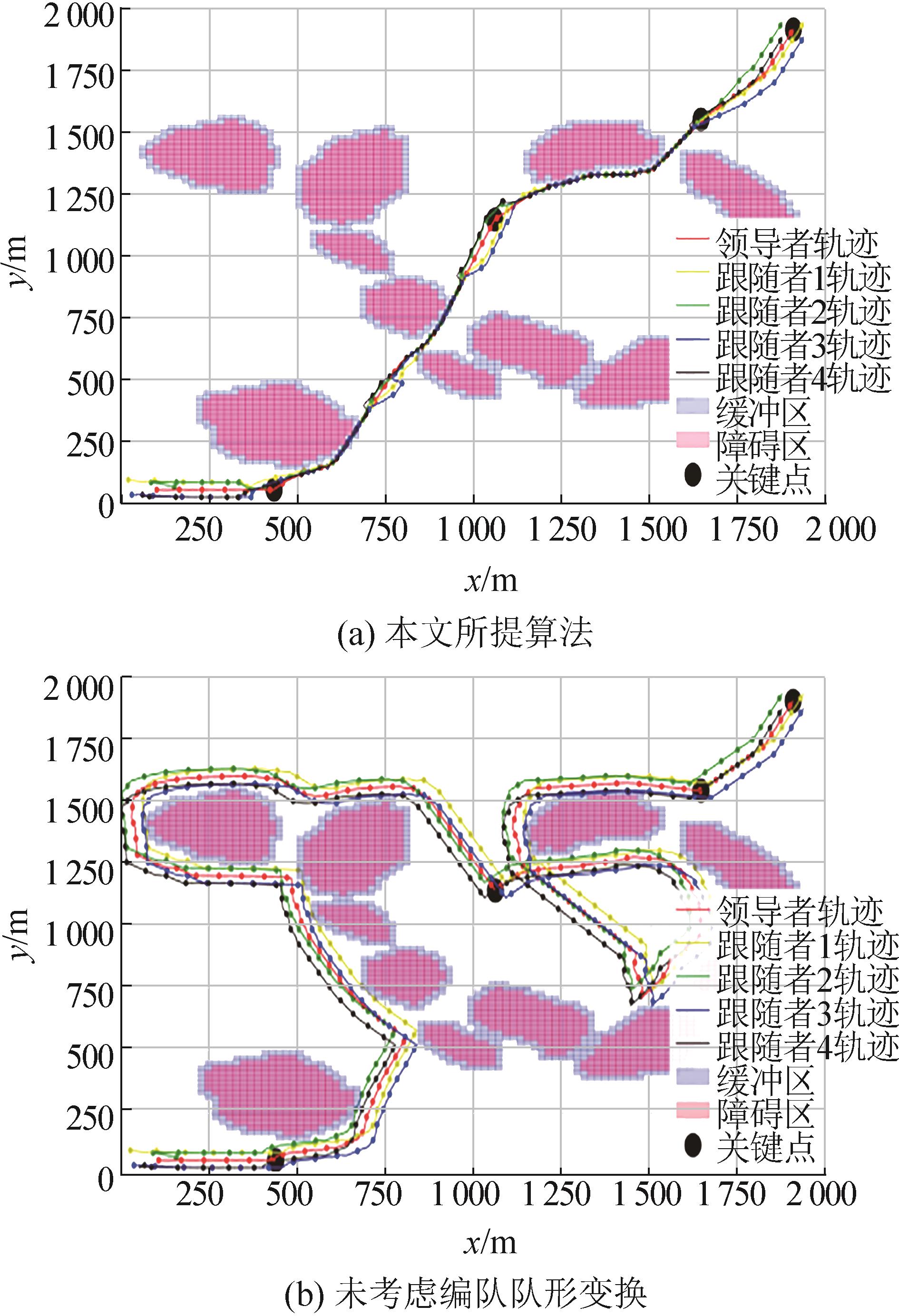
Table 5
Performance of USV in archipelago area
| 航迹 | 路径长度/m | 航行时间/s |
|---|---|---|
| 本文所提算法 | 1 446.68 | 662.34 |
| 未考虑编队队形变换 | 3 429.52 | 1 535.34 |
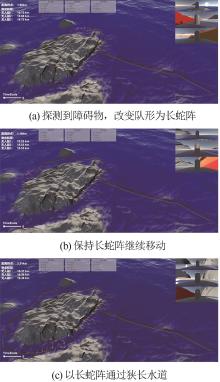
Fig. 13
Navigation process of USV fleet
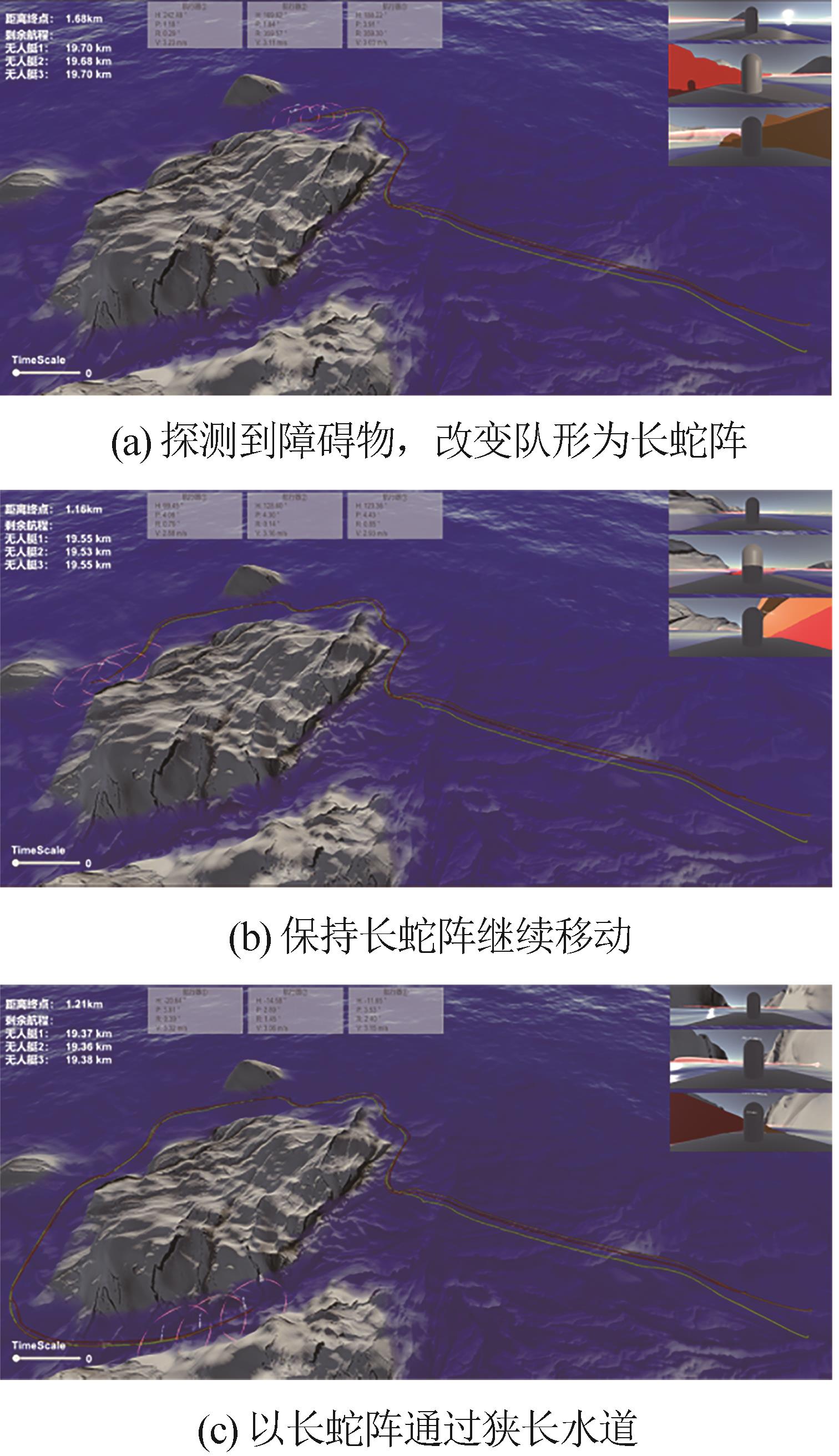
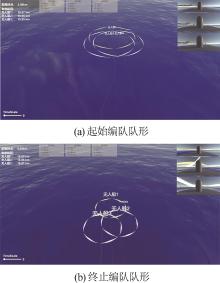
Fig. 14
Formation at the beginning and end of USV navigation
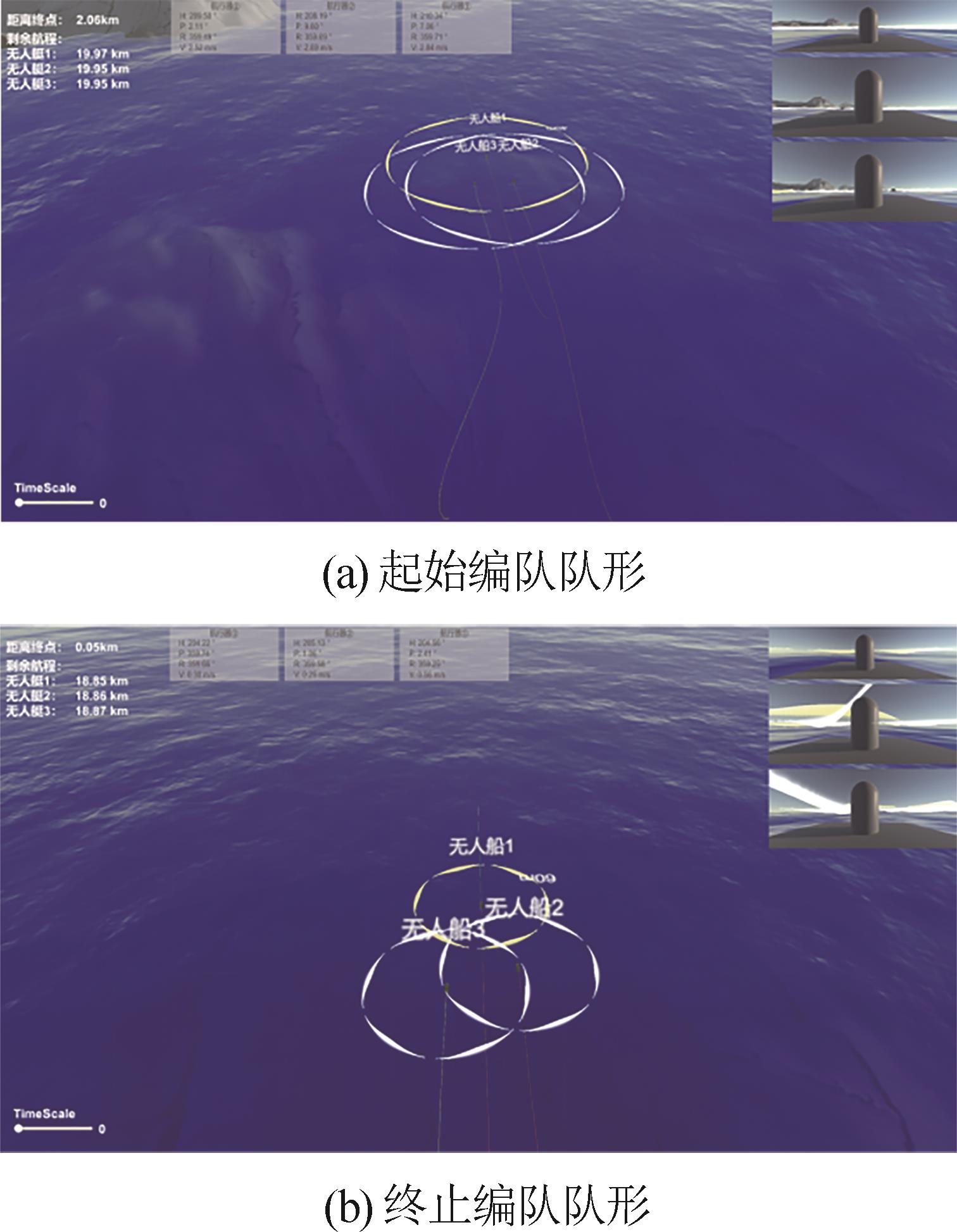

Fig. 15
Overall trajectory of USV fleet under calm sea conditions
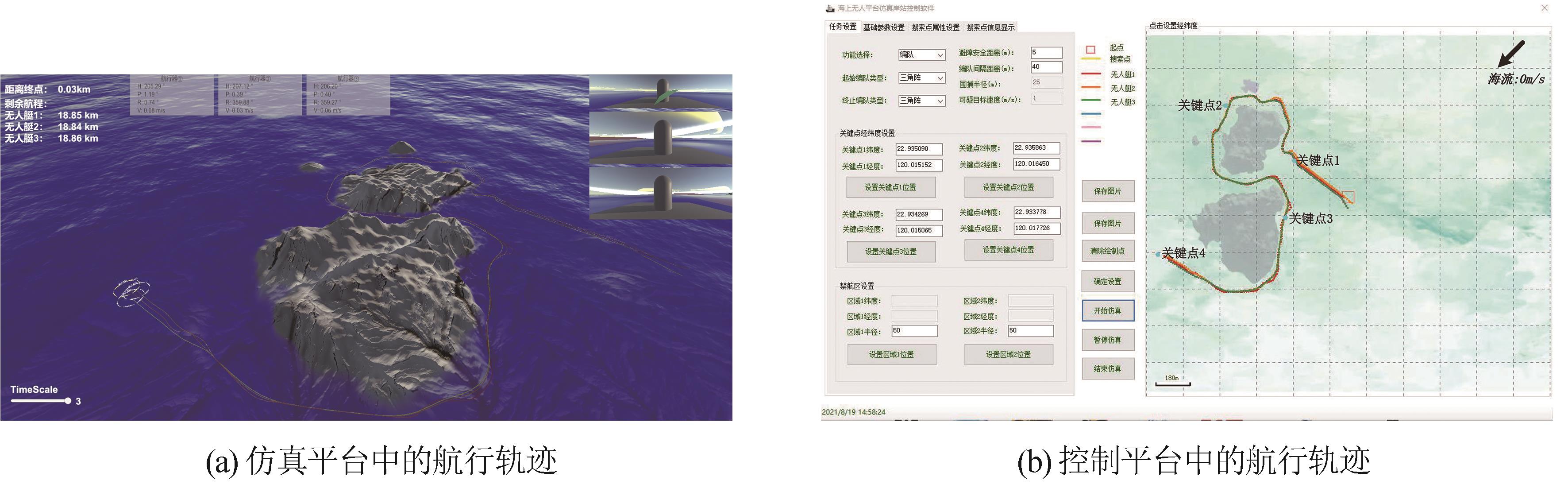

Fig. 16
Overall trajectory of USV fleet under ocean disturbance
| 1 | 郑荣, 辛传龙, 汤钟, 等. 无人水面艇自主部署自主水下机器人平台技术综述[J]. 兵工学报, 2020, 41(8): 1675-1687. |
| Zheng Rong, Xin Chuanlong, Tang Zhong, et al. Review on the Platform Technology of Autonomous Deployment of AUV by USV[J]. Acta Armamentarii, 2020, 41(8): 1675-1687. | |
| 2 | 范云生, 孙晓界, 王国峰, 等. 一种无人水面艇自主动态避碰跟踪控制方法[J]. 系统仿真学报, 2018, 30(10): 3781-3788. |
| Fan Yunsheng, Sun Xiaojie, Wang Guofeng, et al. Tracking Control Method of Autonomous Dynamic Collision Avoidance for Unmanned Surface Vehicle [J]. Journal of System Simulation, 2018, 30(10): 3781-3788. | |
| 3 | 侯瑞超, 唐智诚, 王博, 等. 水面无人艇智能化技术的发展现状和趋势[J].中国造船, 2020, 61(增1): 211-220. |
| Hou Ruichao, Tang Zhicheng, Wang Bo, et al. Development Status and Trend of Intelligent Technology for Unmanned Surface Vehicles[J]. Shipbuilding of China, 2020, 61(S1): 211-220. | |
| 4 | 刘继鹏. 欠驱动水面无人艇的协同控制研究[D]. 武汉: 华中科技大学, 2017. |
| Liu Jipeng. Coordinated Control of Underactuated Surface Unmanned Vehicles[D]. Wuhan:Huazhong University of Science and Technology, 2017. | |
| 5 | 李江昊, 闫亚楠, 彭丹. 微小型移动机器人的路径规划及编队研究[J].计量学报, 2021, 42(4): 445-450. |
| Li Jianghao, Yan Yanan, Peng Dan. Path Planning and Formation Research of Micro Mobile Robots[J]. Acta Metrologica Sinica, 201, 42(4): 445-450. | |
| 6 | 王乐乐, 眭泽智, 蒲志强, 等. 一种改进RRT的多机器人编队路径规划算法[J]. 电子学报, 2020, 48(11): 2138-2145. |
| Wang Lele, Sui Zezhi, Pu Zhiqiang, et al. An Improved RRT Algorithm for Multi-robot Formation Path Planning[J]. Acta Electronica Sinica, 2020, 48(11): 2138-2145. | |
| 7 | 桑雷, 吕强. 基于人工势场法的多机器人编队与避障[J]. 信息系统工程, 2020, 4(3): 139-142, 145. |
| Lei San, Qiang Lü. Multi-robot Formation and Avoidance Barrier Based on Artificial Potential Field[J]. China CIO News, 2020, 4(3): 139-142, 145. | |
| 8 | 潘无为, 姜大鹏, 庞永杰, 等. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2): 326-334. |
| Pan Wuwei, Jiang Dapeng, Pang Yongjie, et al. A Multi-AUV Formation Algorithm Combining Artificial Potential Field and Virtual Structure[J]. Acta Armamentarii, 2017, 38(2): 326-334. | |
| 9 | Liao Gang, Xu Haixiang, Yu Wenzhao, et al. Path Following Control for Formation of Underactuated Surface Vessels[C]// 28th International Ocean and Polar Engineering Conference (ISOPE 2018). Sapporo, Japan: ISOPE, 2018: 684-689. |
| 10 | Sonnenburg C R, Woolsey C A. Modeling, Identification, and Control of an Unmanned Surface Vehicle[J]. Journal of Field Robotics (S1556-4959), 2013, 30(3): 371-398. |
| 11 | Mccue L. Handbook of Marine Craft Hydrodynamics and Motion Control[J]. IEEE Control Systems Magazine (S1066-033X), 2016, 36(1): 78-79. |
| 12 | Chen L, Jin Y, Yin Y. Ocean Wave Rendering with Whitecap in the Visual System of a Maritime Simulator[J]. Journal of Computing and Information Technology (S1330-1136), 2017, 25(1): 63-76. |
| 13 | Fréchot J. Realistic Simulation of Ocean Surface Using Wave Spectra[C]// First International Conference on Computer Graphics Theory and Applications (GRAPP 2006). Setúbal, Portugal: INSTICC, 2006: 76-83. |
| 14 | 王金强, 王聪, 魏英杰, 等. 未知海流干扰下自主水下航行器位置跟踪控制策略研究[J]. 兵工学报, 2019, 40(3): 583-591. |
| Wang Jinqiang, Wang Cong, Wei Yingjie, et al. Position Tracking Control of Autonomous Underwater Vehicles in the Disturbance of Unknown Ocean Currents[J]. Acta Armamentarii, 2019, 40(3): 583-591. | |
| 15 | 吴海鹏. 基于Unity3D船舶摇荡运动实时仿真[D]. 大连: 大连海事大学, 2019. |
| Wu Haipeng. Real-time Simulation of Ship Motion Based on Unity3D[D]. Dalian: Dalian Maritime University, 2019. | |
| 16 | 金建海, 周则兴, 张波, 等. 无人艇航行仿真关键技术研究[J]. 系统仿真学报, 2021, 33(12): 2846-2853. |
| Jin Jianhai, Zhou Zexing, Zhang Bo, et al. Research on USV Navigation Simulation Key Technologies[J]. Journal of System Simulation, 2021, 33(12): 2846-2853. | |
| 17 | 张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12): 2530-2539. |
| Zhang Zhe, Wu Jian, Dai Jiyang, et al. Cooperative Tactical Planning for Multi-UAVs Based on Improved A* Algorithm[J]. Acta Armamentarii, 2020, 41(12): 2530-2539. | |
| 18 | 王宁, 代冀阳, 应进. 基于改进势场的无人机编队恢复与一致性仿真[J]. 系统仿真学报, 2022, 34(5): 978-993. |
| Wang Ning, Dai Jiyang, Ying Jin. UAV Formation Recovery and Consistency Simulation Based on Improved Potential Field[J]. Journal of System Simulation, 2022, 34(5): 978-993. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
