

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (6): 1647-1668.doi: 10.16182/j.issn1004731x.joss.25-0644
• Papers • Previous Articles Next Articles
Liu Manqiang, Shang Ziqiang
Received:2025-07-07
Revised:2025-08-19
Online:2026-06-25
Published:2026-06-25
Contact:
Shang Ziqiang
CLC Number:
Liu Manqiang, Shang Ziqiang. Application of Improved Multi-objective Differential Algorithm in Robotic Arm Multi-objective Trajectory Planning[J]. Journal of System Simulation, 2026, 38(6): 1647-1668.
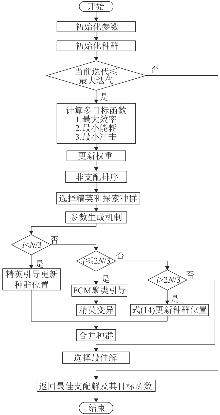
Fig. 1
Flowchart of multi-objective DE
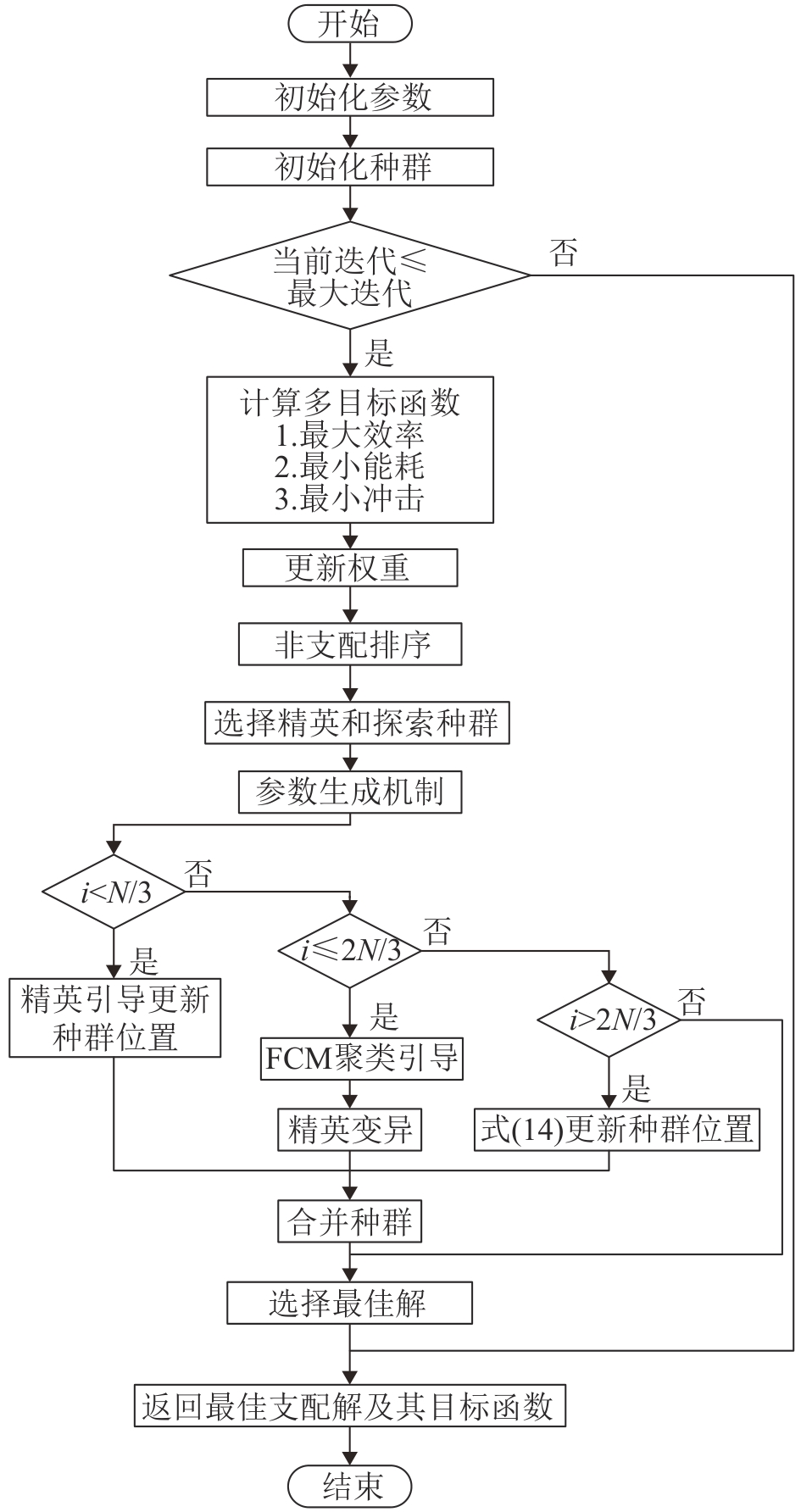

Fig. 2
Non-dominated solutions of each algorithm on three-objective DTLZ5 problem
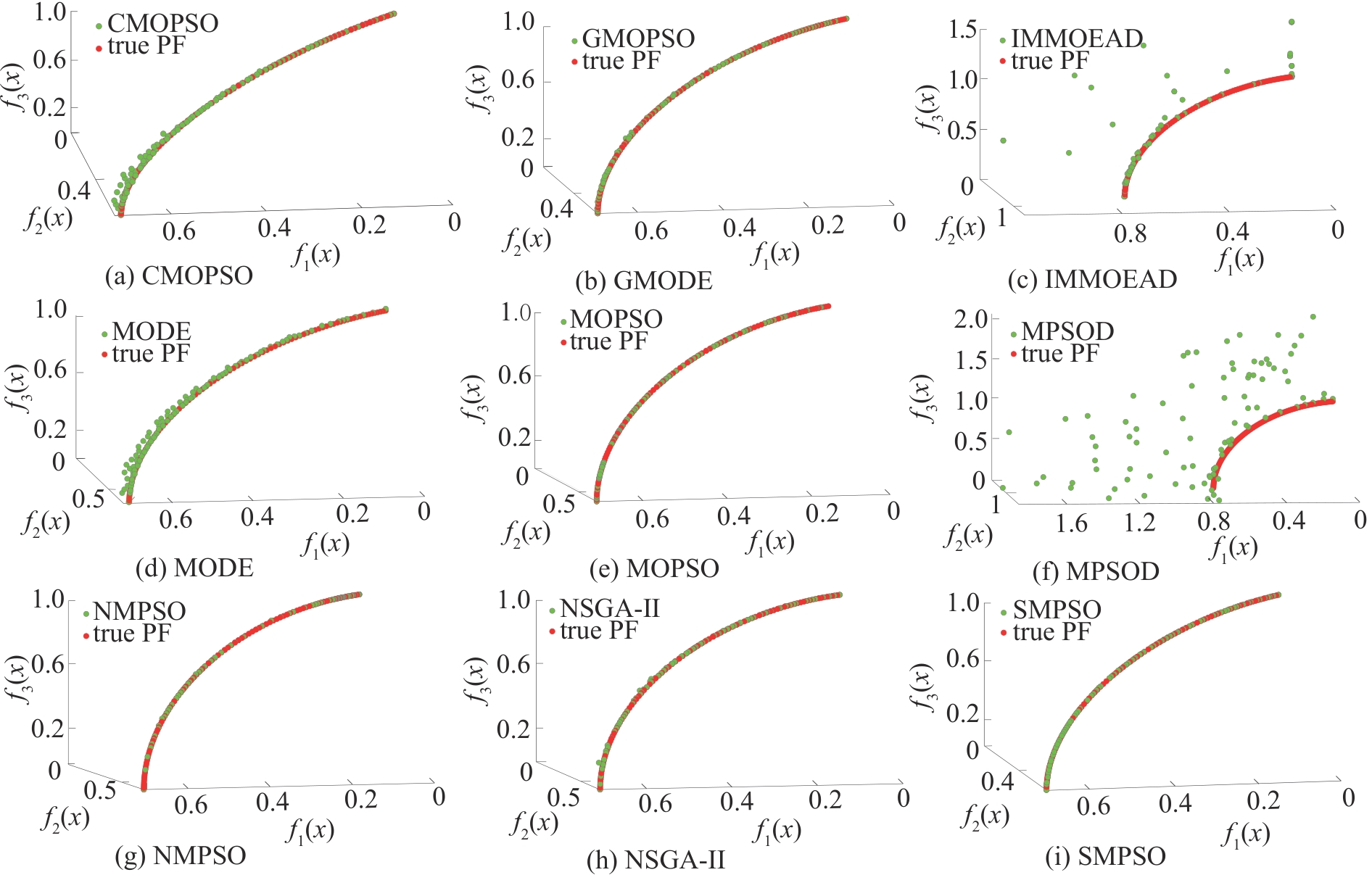

Fig. 3
Non-dominated solutions of each algorithm on three-objective DTLZ7 problem

Fig. 4
Non-dominated solutions of each algorithm on three-objective WFG4 problem
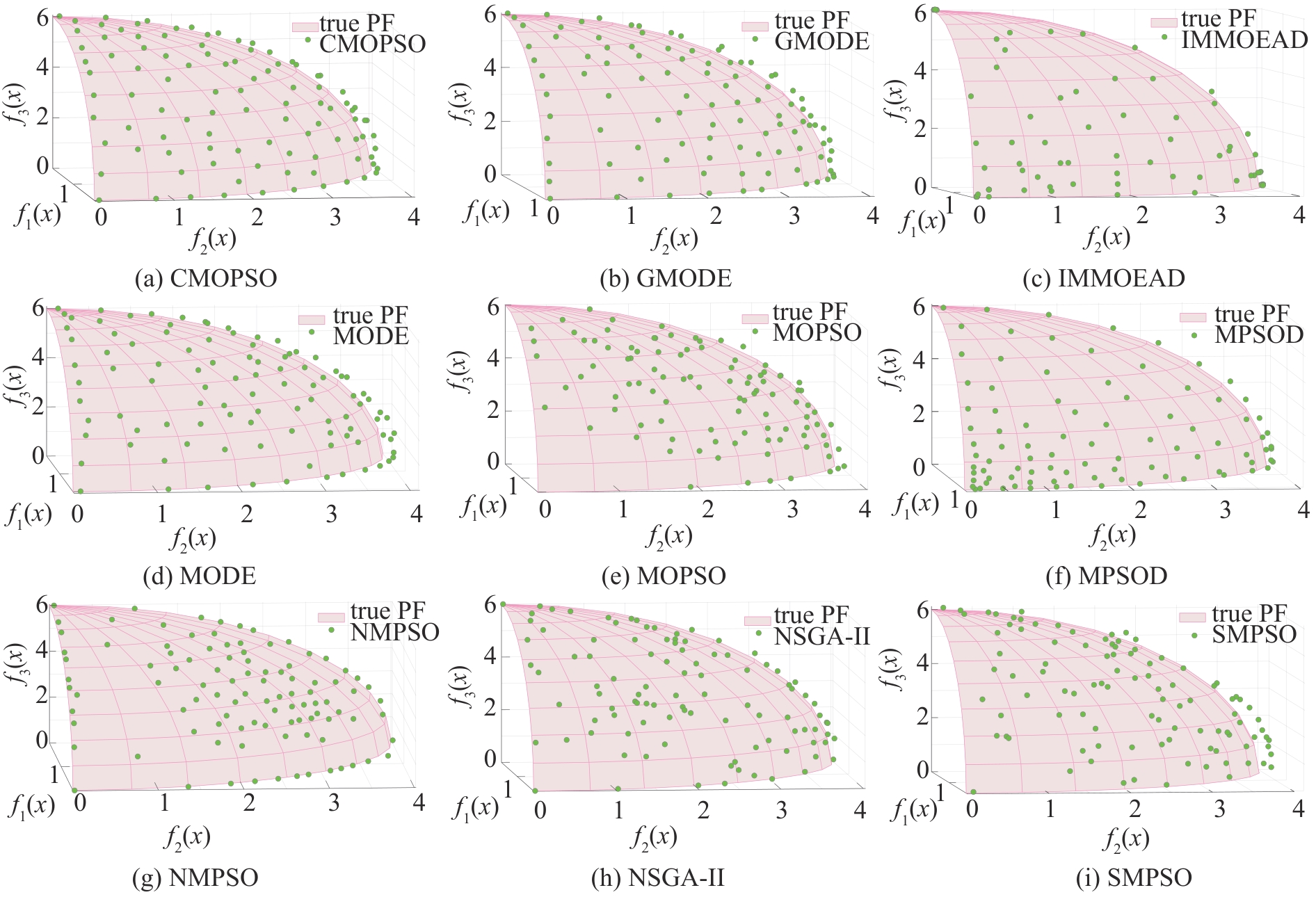

Fig. 5
Non-dominated solutions of each algorithm on three-objective WFG5 problem
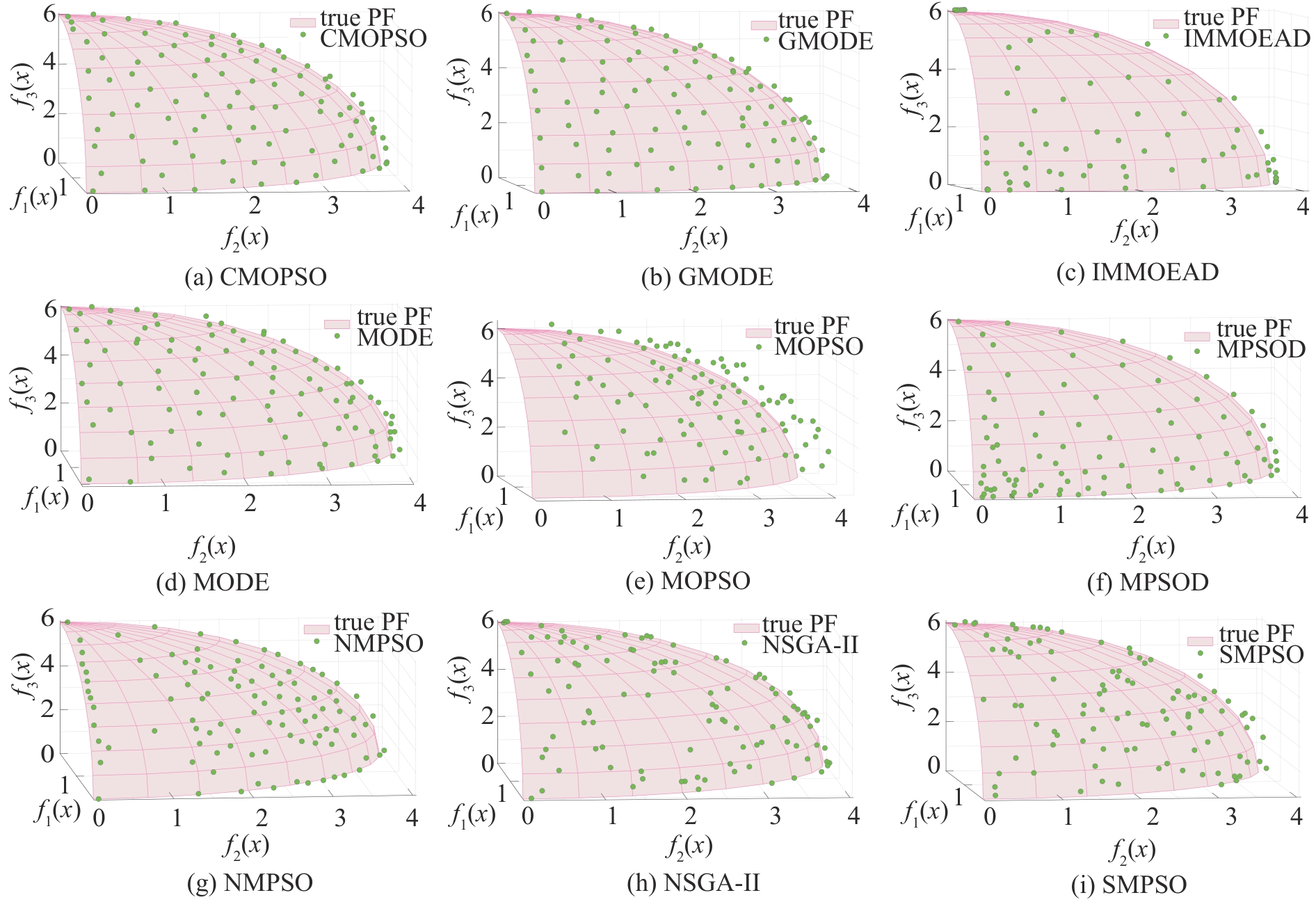
Table 1
IGD performance metric comparison of each algorithm
| 问题 | 指标 | MODE | CMOPSO | IMMOEAD | MOPSO | MPSOD | NMPSO | NSGA-II | SMPSO | GMODE |
|---|---|---|---|---|---|---|---|---|---|---|
| DTLZ1 | Mean | 5.02E-01(-) | 1.44E+01(-) | 1.69E+00(-) | 9.80E+00(-) | 1.91E+00(-) | 3.35E+00(-) | 2.22E-01(-) | 2.35E+00(-) | 1.07E-01 |
| Std. | 2.97E-01 | 4.44E+00 | 6.65E-01 | 3.56E+00 | 6.53E-01 | 1.64E+00 | 2.49E-01 | 3.33E+00 | 1.61E-01 | |
| DTLZ2 | Mean | 6.90E-02(-) | 5.79E-02(-) | 7.54E-02(-) | 7.61E-02(-) | 5.51E-02(-) | 7.65E-02(-) | 6.98E-02(-) | 9.00E-02(-) | 5.45E-02 |
| Std. | 1.56E-03 | 8.13E-04 | 7.06E-04 | 5.11E-03 | 1.49E-04 | 2.89E-03 | 2.59E-03 | 9.41E-03 | 1.20E-03 | |
| DTLZ3 | Mean | 6.20E+01(-) | 1.42E+02(-) | 3.04E+01(-) | 2.06E+02(-) | 7.02E+01(-) | 9.56E+01(-) | 7.41E+00(-) | 3.75E+01(-) | 1.24E+00 |
| Std. | 1.33E+01 | 3.43E+01 | 7.17E+00 | 5.65E+01 | 1.01E+01 | 2.24E+01 | 4.12E+00 | 4.24E+01 | 1.22E+00 | |
| DTLZ4 | Mean | 7.36E-02(-) | 9.04E-02(-) | 7.83E-02(-) | 1.36E-01(-) | 5.53E-02(-) | 7.77E-02(-) | 1.16E-01(-) | 4.46E-01(-) | 5.37E-02 |
| Std. | 2.88E-03 | 1.62E-01 | 4.04E-03 | 2.20E-01 | 3.42E-04 | 2.44E-03 | 1.44E-01 | 2.39E-01 | 6.63E-04 | |
| DTLZ5 | Mean | 1.31E-02(-) | 7.29E-03(-) | 2.73E-02(-) | 8.30E-03(-) | 3.83E-02(-) | 1.22E-02(-) | 6.01E-03(-) | 5.91E-03(-) | 4.17E-03 |
| Std. | 1.38E-03 | 5.99E-04 | 4.60E-04 | 1.14E-03 | 2.45E-03 | 1.62E-03 | 3.75E-04 | 5.02E-04 | 3.84E-05 | |
| DTLZ6 | Mean | 4.63E-03(-) | 1.70E-01(-) | 3.52E+00(-) | 4.87E+00(-) | 3.21E-02(-) | 1.40E-02(-) | 5.93E-03(-) | 1.17E+00(-) | 4.15E-03 |
| Std. | 5.66E-05 | 4.36E-01 | 1.55E-01 | 5.39E-01 | 1.27E-03 | 2.67E-03 | 2.67E-04 | 8.72E-01 | 3.74E-05 | |
| DTLZ7 | Mean | 7.42E-02(-) | 1.42E-01(-) | 2.00E-01(-) | 1.90E+00(-) | 3.04E-01(-) | 6.89E-02(-) | 1.04E-01(-) | 6.63E-01(-) | 5.83E-02 |
| Std. | 2.64E-03 | 1.65E-01 | 6.17E-03 | 5.34E-01 | 1.16E-01 | 3.87E-03 | 5.15E-02 | 3.94E-01 | 9.79E-04 | |
| WFG1 | Mean | 1.05E+00(-) | 1.62E+00(-) | 1.08E+00(-) | 1.77E+00(-) | 1.59E+00(-) | 1.05E+00(-) | 5.75E-01(+) | 1.55E+00(-) | 8.81E-01 |
| Std. | 8.57E-02 | 3.57E-02 | 6.29E-02 | 1.28E-01 | 8.25E-02 | 6.88E-02 | 6.99E-02 | 4.02E-02 | 6.20E-02 | |
| WFG2 | Mean | 1.92E-01(-) | 1.85E-01(=) | 3.26E-01(-) | 2.21E-01(-) | 2.13E-01(-) | 3.80E-01(-) | 2.25E-01(-) | 2.74E-01(-) | 1.83E-01 |
| Std. | 4.53E-03 | 6.00E-03 | 1.16E-02 | 1.40E-02 | 9.44E-03 | 2.56E-02 | 1.34E-02 | 2.09E-02 | 3.78E-03 | |
| WFG3 | Mean | 2.35E-01(-) | 1.69E-01(=) | 2.26E-01(-) | 3.10E-01(-) | 2.85E-01(-) | 8.46E-02(+) | 1.30E-01(+) | 2.05E-01(-) | 1.63E-01 |
| Std. | 1.90E-02 | 1.80E-02 | 1.34E-02 | 8.61E-02 | 2.60E-02 | 6.96E-03 | 2.56E-02 | 3.53E-02 | 1.07E-02 | |
| WFG4 | Mean | 2.95E-01(-) | 2.67E-01(-) | 3.57E-01(-) | 4.06E-01(-) | 2.73E-01(-) | 2.96E-01(-) | 2.81E-01(-) | 3.28E-01(-) | 2.32E-01 |
| Std. | 6.50E-03 | 5.61E-03 | 7.44E-03 | 4.37E-02 | 5.50E-03 | 1.71E-02 | 9.29E-03 | 1.43E-02 | 2.86E-03 | |
| WFG5 | Mean | 2.48E-01(-) | 2.48E-01(-) | 3.54E-01(-) | 6.95E-01(-) | 2.55E-01(-) | 2.93E-01(-) | 2.85E-01(-) | 3.22E-01(-) | 2.31E-01 |
| Std. | 6.51E-03 | 6.26E-03 | 7.91E-03 | 5.18E-02 | 1.20E-03 | 1.12E-02 | 1.00E-02 | 2.19E-02 | 2.36E-03 | |
| WFG6 | Mean | 2.82E-01(-) | 2.56E-01(-) | 3.67E-01(-) | 3.51E-01(-) | 2.82E-01(-) | 4.07E-01(-) | 3.27E-01(-) | 3.80E-01(-) | 2.39E-01 |
| Std. | 2.25E-02 | 1.19E-02 | 7.42E-03 | 3.57E-02 | 1.13E-02 | 1.12E-02 | 1.59E-02 | 2.44E-02 | 3.83E-03 | |
| WFG7 | Mean | 2.72E-01(-) | 2.37E-01(+) | 3.61E-01(-) | 3.85E-01(-) | 2.66E-01(-) | 3.10E-01(-) | 2.82E-01(-) | 3.62E-01(-) | 2.52E-01 |
| Std. | 6.52E-03 | 5.14E-03 | 5.46E-03 | 4.11E-02 | 4.47E-03 | 9.96E-03 | 9.71E-03 | 2.57E-02 | 5.28E-03 | |
| WFG8 | Mean | 3.76E-01(-) | 3.64E-01(-) | 3.95E-01(-) | 6.05E-01(-) | 4.04E-01(-) | 3.64E-01(-) | 3.78E-01(-) | 5.03E-01(-) | 3.04E-01 |
| Std. | 8.97E-03 | 1.29E-02 | 7.00E-03 | 3.11E-02 | 1.41E-02 | 1.25E-02 | 9.37E-03 | 3.56E-02 | 4.56E-03 | |
| WFG9 | Mean | 3.51E-01(-) | 2.26E-01(+) | 3.43E-01(-) | 3.26E-01(-) | 2.68E-01(-) | 3.28E-01(-) | 2.84E-01(-) | 2.97E-01(-) | 2.44E-01 |
| Std. | 3.61E-02 | 5.29E-03 | 7.09E-03 | 3.67E-02 | 1.23E-02 | 5.94E-02 | 1.30E-02 | 1.80E-02 | 5.12E-03 | |
| ZDT1 | Mean | 6.13E-03(-) | 5.11E-03(-) | 1.49E-02(-) | 5.40E-01(-) | 4.42E-03(-) | 3.11E-02(-) | 1.29E-02(-) | 8.66E-02(-) | 3.79E-03 |
| Std. | 5.78E-04 | 4.21E-04 | 6.84E-04 | 1.05E-01 | 6.79E-04 | 2.06E-02 | 1.99E-03 | 1.02E-01 | 3.37E-05 | |
| ZDT2 | Mean | 6.63E-03(-) | 4.62E-03(-) | 1.87E-02(-) | 1.44E+00(-) | 3.93E-03(-) | 1.87E-02(-) | 2.46E-02(-) | 2.27E-02(-) | 3.83E-03 |
| Std. | 6.32E-04 | 3.95E-04 | 9.67E-04 | 2.59E-01 | 1.94E-04 | 4.15E-03 | 3.40E-02 | 6.54E-02 | 2.85E-05 | |
| ZDT3 | Mean | 9.90E-03(-) | 5.47E-03(-) | 1.32E-02(-) | 4.53E-01(-) | 1.07E-02(-) | 1.01E-01(-) | 1.18E-02(-) | 1.53E-01(-) | 4.50E-03 |
| Std. | 1.33E-03 | 6.02E-04 | 4.20E-04 | 7.81E-02 | 4.66E-04 | 8.19E-04 | 6.04E-03 | 9.00E-02 | 4.67E-05 | |
| ZDT4 | Mean | 1.52E+01(-) | 5.99E+00(-) | 9.19E-03(=) | 1.03E+01(-) | 2.37E+01(-) | 1.30E+01(-) | 2.70E-01(-) | 8.76E+00(-) | 9.46E-02 |
| Std. | 3.81E+00 | 3.40E+00 | 1.02E-02 | 4.49E+00 | 4.37E+00 | 1.23E+01 | 2.20E-01 | 5.66E+00 | 9.54E-02 | |
| ZDT6 | Mean | 3.09E-03(-) | 3.24E-03(-) | 1.13E+00(-) | 2.14E-01(-) | 3.09E-03(-) | 4.45E-03(-) | 5.31E-02(-) | 3.86E-03(-) | 3.05E-03 |
| Std. | 1.74E-05 | 1.32E-04 | 5.30E-02 | 2.99E-01 | 9.11E-06 | 5.54E-04 | 2.80E-02 | 1.77E-04 | 1.47E-05 | |
| +/-/= | 0/21/0 | 2/17/2 | 0/20/1 | 0/21/0 | 0/21/0 | 1/20/0 | 2/19/0 | 0/21/0 | ||
| Best/All | 0/21 | 2/21 | 1/21 | 0/21 | 0/21 | 1/21 | 1/21 | 0/21 | 16/21 | |
Table2
HV performance metric comparison of each algorithm
| 问题 | 指标 | MODE | CMOPSO | IMMOEAD | MOPSO | MPSOD | NMPSO | NSGA-II | SMPSO | GMODE |
|---|---|---|---|---|---|---|---|---|---|---|
| DTLZ1 | Mean | 1.69E-01(-) | 0(-) | 0(-) | 0(-) | 0(-) | 1.76E-06(-) | 4.82E-01(-) | 1.57E-01(-) | 6.60E-01 |
| Std. | 3.25E-01 | 0 | 0 | 0 | 0 | 9.62E-06 | 3.69E-01 | 2.23E-01 | 3.08E-01 | |
| DTLZ2 | Mean | 5.18E-01(-) | 5.41E-01(-) | 5.25E-01(-) | 5.11E-01(-) | 5.56E-01(=) | 5.60E-01(+) | 5.29E-01(-) | 4.62E-01(-) | 5.56E-01 |
| Std. | 3.98E-03 | 2.47E-03 | 2.52E-03 | 1.10E-02 | 4.78E-04 | 1.03E-03 | 3.86E-03 | 2.17E-02 | 4.34E-03 | |
| DTLZ3 | Mean | 0(-) | 0(-) | 0(-) | 0(-) | 0(-) | 0(-) | 0(-) | 1.34E-02(-) | 1.80E-01 |
| Std. | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3.74E-02 | 2.47E-01 | |
| DTLZ4 | Mean | 5.12E-01(-) | 5.20E-01(-) | 5.25E-01(-) | 4.62E-01(-) | 5.55E-01(-) | 5.60E-01(=) | 5.14E-01(-) | 3.15E-01(-) | 5.59E-01 |
| Std. | 6.29E-03 | 8.11E-02 | 3.52E-03 | 1.04E-01 | 1.18E-03 | 1.03E-03 | 5.71E-02 | 1.20E-01 | 2.53E-03 | |
| DTLZ5 | Mean | 1.91E-01(-) | 1.97E-01(-) | 1.84E-01(-) | 1.96E-01(-) | 1.70E-01(-) | 1.96E-01(-) | 1.99E-01(-) | 1.98E-01(-) | 2.00E-01 |
| Std. | 1.26E-03 | 5.07E-04 | 4.21E-04 | 2.21E-03 | 3.15E-03 | 6.38E-04 | 1.92E-04 | 4.96E-04 | 4.36E-05 | |
| DTLZ6 | Mean | 2.00E-01(-) | 1.69E-01(-) | 0(-) | 0(-) | 1.83E-01(-) | 1.96E-01(-) | 1.99E-01(-) | 4.77E-02(-) | 2.00E-01 |
| Std. | 4.24E-05 | 7.25E-02 | 0 | 0 | 8.88E-04 | 1.04E-03 | 1.48E-04 | 8.54E-02 | 3.75E-05 | |
| DTLZ7 | Mean | 2.63E-01(-) | 2.57E-01(-) | 2.21E-01(-) | 6.97E-03(-) | 1.53E-01(-) | 2.75E-01(-) | 2.46E-01(-) | 1.28E-01(-) | 2.79E-01 |
| Std. | 2.55E-03 | 1.56E-02 | 4.09E-03 | 1.02E-02 | 4.79E-02 | 1.18E-03 | 7.59E-03 | 7.03E-02 | 5.13E-04 | |
| WFG1 | Mean | 4.72E-01(-) | 2.26E-01(-) | 3.74E-01(-) | 1.72E-01(-) | 2.20E-01(-) | 4.37E-01(-) | 6.93E-01(=) | 2.59E-01(-) | 7.08E-01 |
| Std. | 4.94E-02 | 1.62E-02 | 3.73E-02 | 4.07E-02 | 3.39E-02 | 3.34E-02 | 4.05E-02 | 1.34E-02 | 4.34E-02 | |
| WFG2 | Mean | 9.06E-01(-) | 9.18E-01(-) | 8.64E-01(-) | 8.84E-01(-) | 8.81E-01(-) | 8.65E-01(-) | 9.04E-01(-) | 8.41E-01(-) | 9.30E-01 |
| Std. | 2.49E-03 | 2.83E-03 | 7.23E-03 | 1.07E-02 | 8.17E-03 | 1.33E-02 | 5.01E-03 | 1.54E-02 | 1.08E-03 | |
| WFG3 | Mean | 3.10E-01(-) | 3.45E-01(=) | 3.13E-01(-) | 2.66E-01(-) | 2.62E-01(-) | 3.79E-01(+) | 3.75E-01+ | 3.34E-01(-) | 3.48E-01 |
| Std. | 8.74E-03 | 9.32E-03 | 6.12E-03 | 3.10E-02 | 1.55E-02 | 4.23E-03 | 1.00E-02 | 1.73E-02 | 5.99E-03 | |
| WFG4 | Mean | 4.68E-01(-) | 4.84E-01(-) | 4.87E-01(-) | 4.27E-01(-) | 4.92E-01(-) | 5.41E-01(+) | 5.03E-01(-) | 4.52E-01(-) | 5.37E-01 |
| Std. | 3.77E-03 | 3.64E-03 | 2.81E-03 | 1.41E-02 | 4.99E-03 | 2.37E-03 | 5.89E-03 | 9.84E-03 | 3.10E-03 | |
| WFG5 | Mean | 4.88E-01(-) | 4.81E-01(-) | 4.59E-01(-) | 2.58E-01(-) | 4.82E-01(-) | 5.12E-01(+) | 4.82E-01(-) | 4.40E-01(-) | 5.08E-01 |
| Std. | 5.72E-03 | 4.92E-03 | 5.35E-03 | 1.75E-02 | 2.09E-03 | 3.57E-03 | 5.30E-03 | 1.51E-02 | 2.47E-03 | |
| WFG6 | Mean | 4.79E-01(-) | 4.98E-01(-) | 4.64E-01(-) | 4.49E-01(-) | 4.85E-01(-) | 4.17E-01(-) | 4.52E-01(-) | 4.13E-01(-) | 5.22E-01 |
| Std. | 2.11E-02 | 1.33E-02 | 1.22E-02 | 1.63E-02 | 1.14E-02 | 9.86E-04 | 1.57E-02 | 2.00E-02 | 6.24E-03 | |
| WFG7 | Mean | 4.88E-01(-) | 5.17E-01(-) | 4.91E-01(-) | 4.23E-01(-) | 5.12E-01(-) | 5.52E-01(+) | 5.13E-01(-) | 4.22E-01(-) | 5.23E-01 |
| Std. | 4.91E-03 | 4.00E-03 | 4.43E-03 | 1.92E-02 | 4.87E-03 | 1.15E-03 | 5.20E-03 | 1.94E-02 | 4.51E-03 | |
| WFG8 | Mean | 4.06E-01(-) | 4.12E-01(-) | 4.21E-01(-) | 3.14E-01(-) | 3.79E-01(-) | 4.58E-01(=) | 4.26E-01(-) | 3.36E-01(-) | 4.58E-01 |
| Std. | 5.84E-03 | 7.17E-03 | 3.54E-03 | 9.70E-03 | 8.60E-03 | 3.42E-03 | 5.42E-03 | 1.61E-02 | 2.80E-03 | |
| WFG9 | Mean | 4.05E-01(-) | 5.05E-01(+) | 4.81E-01(-) | 4.59E-01(-) | 4.80E-01(-) | 4.66E-01(=) | 4.85E-01(-) | 4.60E-01(-) | 5.02E-01 |
| Std. | 2.96E-02 | 5.28E-03 | 5.29E-03 | 1.08E-02 | 1.03E-02 | 5.62E-02 | 1.09E-02 | 1.14E-02 | 3.74E-03 | |
| ZDT1 | Mean | 7.15E-01(-) | 7.17E-01(-) | 7.03E-01(-) | 1.71E-01(-) | 7.18E-01(-) | 6.88E-01(-) | 7.06E-01(-) | 6.14E-01(-) | 7.21E-01 |
| Std. | 9.23E-04 | 8.16E-04 | 8.65E-04 | 7.35E-02 | 1.38E-03 | 2.23E-02 | 2.63E-03 | 1.20E-01 | 3.06E-05 | |
| ZDT2 | Mean | 4.39E-01(-) | 4.43E-01(-) | 4.18E-01(-) | 0(-) | 4.45E-01(-) | 4.36E-01(-) | 4.16E-01(-) | 4.23E-01(-) | 4.45E-01 |
| Std. | 9.16E-04 | 9.34E-04 | 1.54E-03 | 0 | 2.47E-04 | 2.30E-03 | 3.32E-02 | 7.11E-02 | 3.46E-05 | |
| ZDT3 | Mean | 5.93E-01(-) | 5.99E-01(-) | 5.94E-01(-) | 2.91E-01(-) | 5.97E-01(-) | 5.67E-01(-) | 5.95E-01(-) | 5.55E-01(-) | 6.00E-01 |
| Std. | 1.35E-03 | 1.09E-03 | 1.05E-03 | 5.72E-02 | 1.44E-03 | 3.90E-04 | 1.60E-02 | 8.55E-02 | 2.79E-05 | |
| ZDT4 | Mean | 0(-) | 0(-) | 7.11E-01(=) | 0(-) | 0(-) | 0(-) | 4.80E-01(-) | 0(-) | 6.09E-01 |
| Std. | 0 | 0 | 1.09E-02 | 0 | 0 | 0 | 1.59E-01 | 0 | 1.14E-01 | |
| ZDT6 | Mean | 3.89E-01(-) | 3.89E-01(-) | 0(-) | 2.64E-01(-) | 3.88E-01(-) | 3.88E-01(-) | 3.22E-01(-) | 3.88E-01(-) | 3.89E-01 |
| Std. | 1.67E-05 | 1.44E-04 | 0 | 1.57E-01 | 1.02E-05 | 4.68E-04 | 3.40E-02 | 1.48E-04 | 1.34E-05 | |
| +/-/= | 0/21/0 | 1/19/1 | 0/201 | 0/21/0 | 0/20/1 | 5/15/3 | 1/19/1 | 0/21/0 | ~ | |
| Best/All | 0/21 | 1/21 | 1/21 | 0/21 | 0/21 | 7/21 | 0/21 | 0/21 | 12/21 | |
Table 3
D-H parameters of KUKA KR3 R540 robotic arm
| 连杆 | ||||
|---|---|---|---|---|
| 1 | 0.345 | 0.02 | -90 | |
| 2 | 0 | 0.26 | 0 | |
| 3 | 0 | 0.02 | -90 | |
| 4 | 0.260 | 0 | 90 | |
| 5 | 0 | 0 | -90 | |
| 6 | 0.075 | 0 | 0 |
Fig. 6
D-H link coordinate system of robotic arm
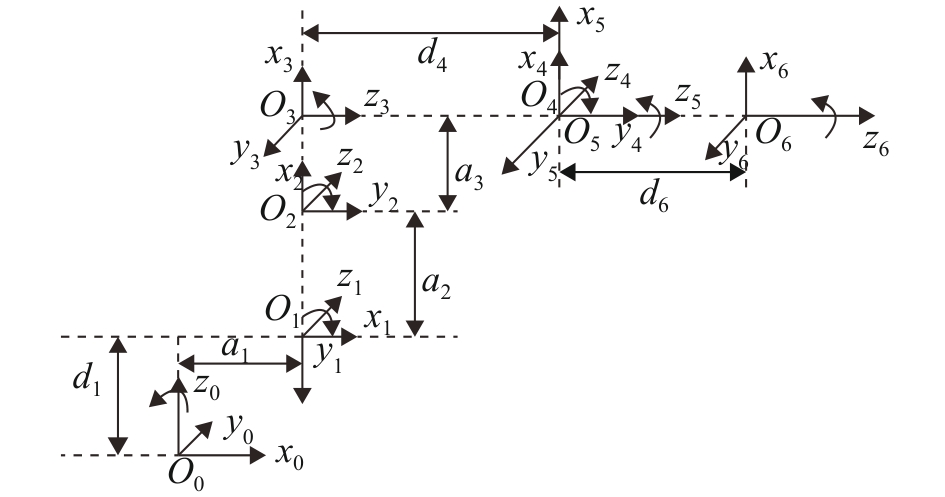
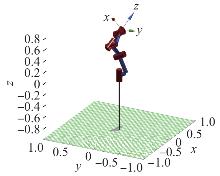
Fig. 7
Simulation o f robotic arm
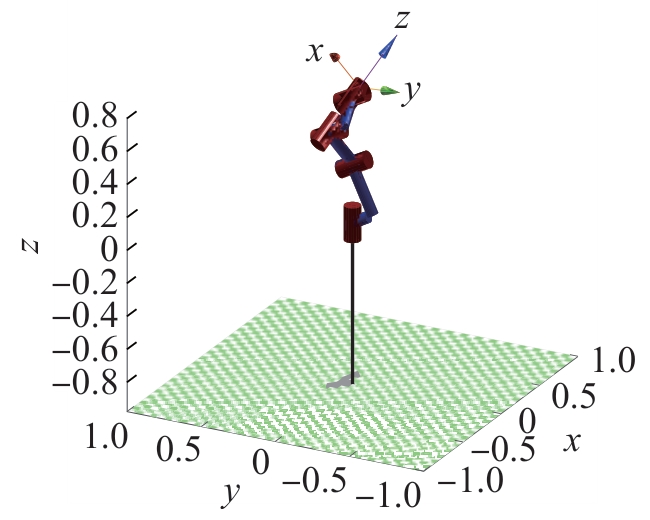
Table 4
Interpolated path points
| 关节编号 | 起始点 | 路径点1 | 路径点2 | 终止点 |
|---|---|---|---|---|
| 1 | -0.523 6 | 0.523 6 | 1.047 2 | 1.570 8 |
| 2 | 0 | 1.047 2 | -0.523 6 | 0 |
| 3 | 0.261 8 | 0.785 4 | 1.047 2 | 1.309 0 |
| 4 | -0.523 6 | 0.314 2 | -0.942 5 | -0.523 6 |
| 5 | 0.418 9 | 1.152 0 | 1.518 4 | 1.885 0 |
| 6 | -0.785 4 | 0.157 1 | -1.256 6 | -0.785 4 |

Fig. 8
Path curves obtained by fusing 3-5-3 degree polynomials with B-spline curve interpolation
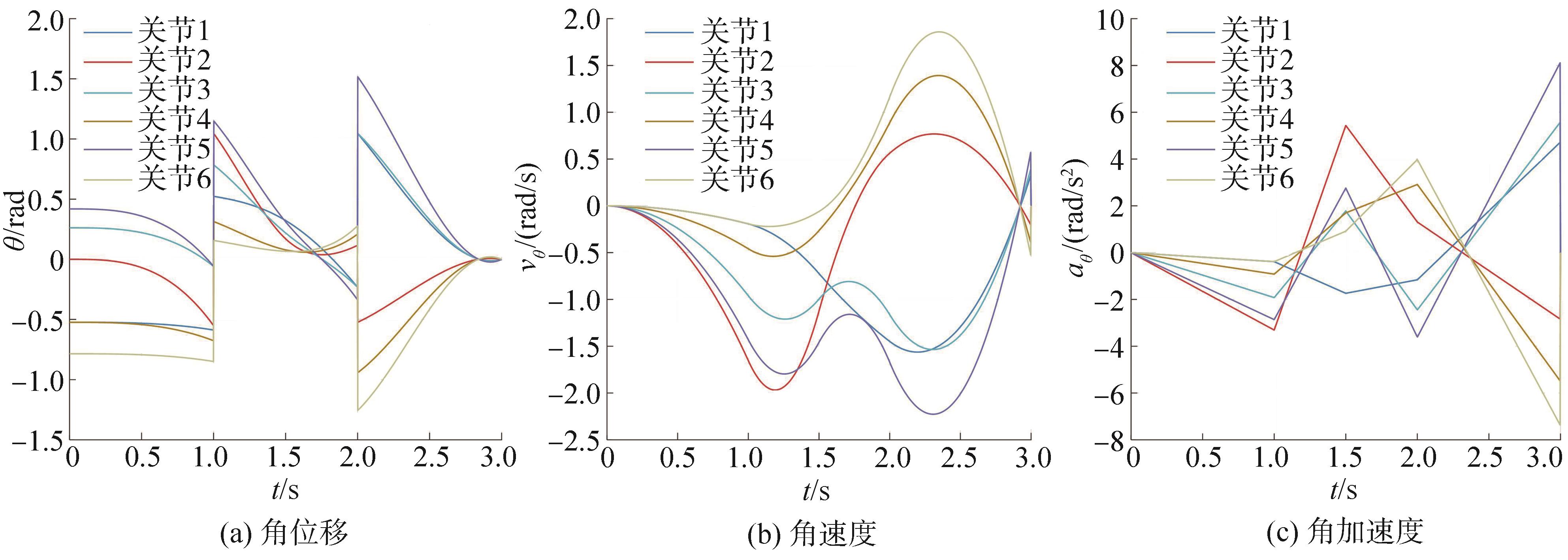

Fig. 9
Path curves optimized by MOPSO algorithm
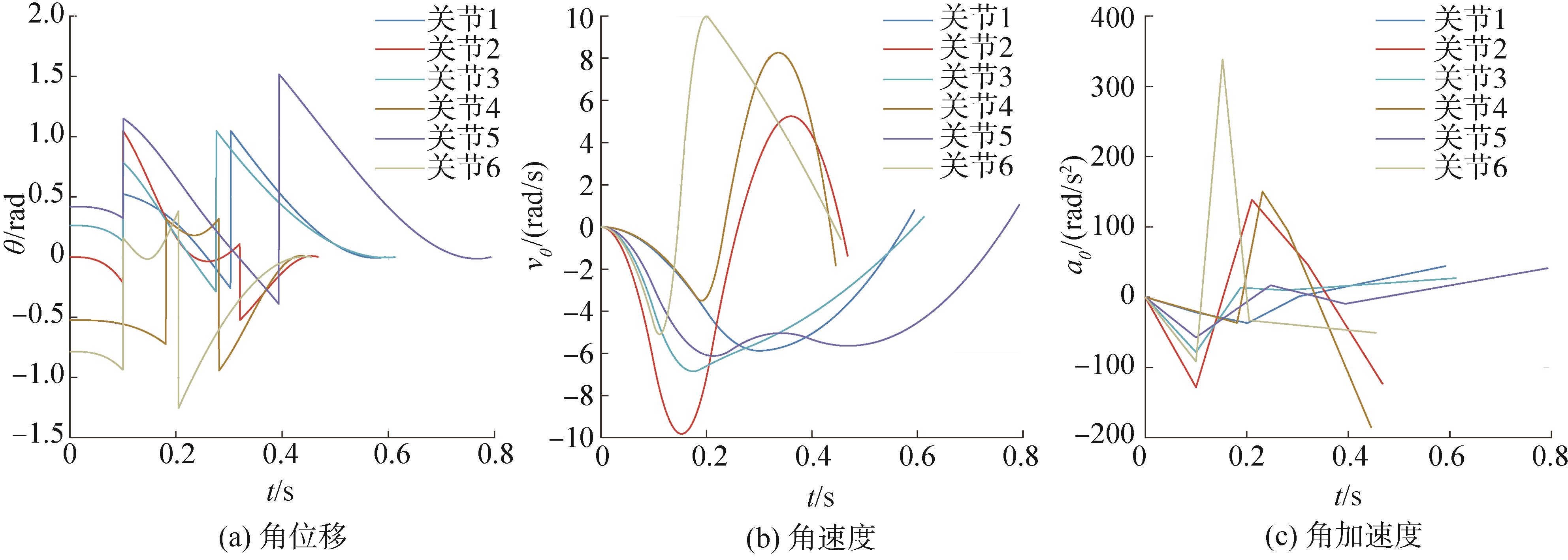

Fig. 10
Path curves optimized by MODE algorithm
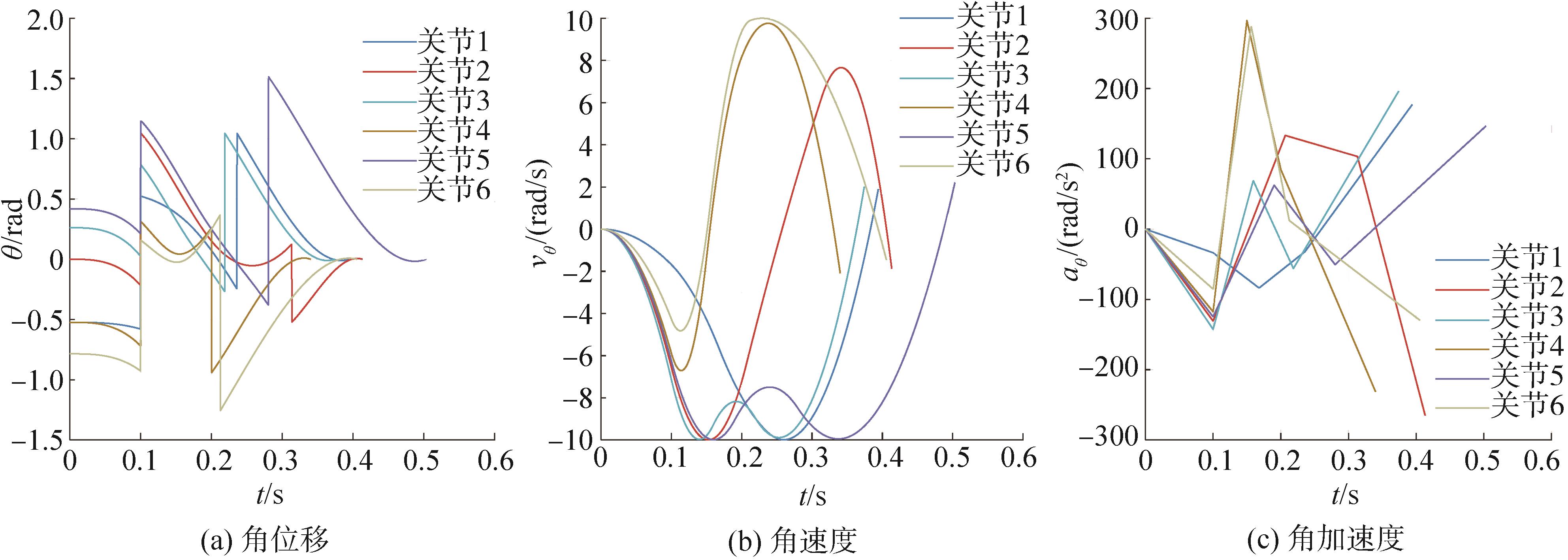

Fig. 11
Path curves optimized by GMODE algorithm
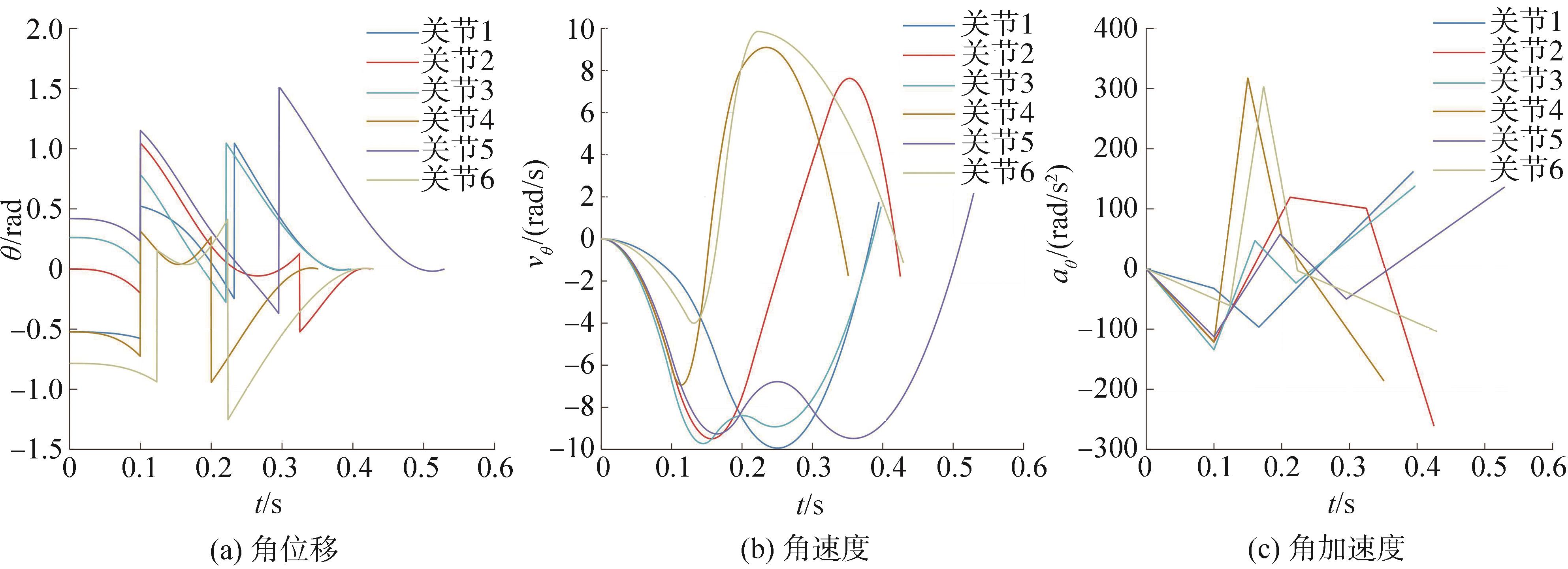

Fig. 12
Time, impact, and energy convergence for each joint of robotic arm under different algorithms
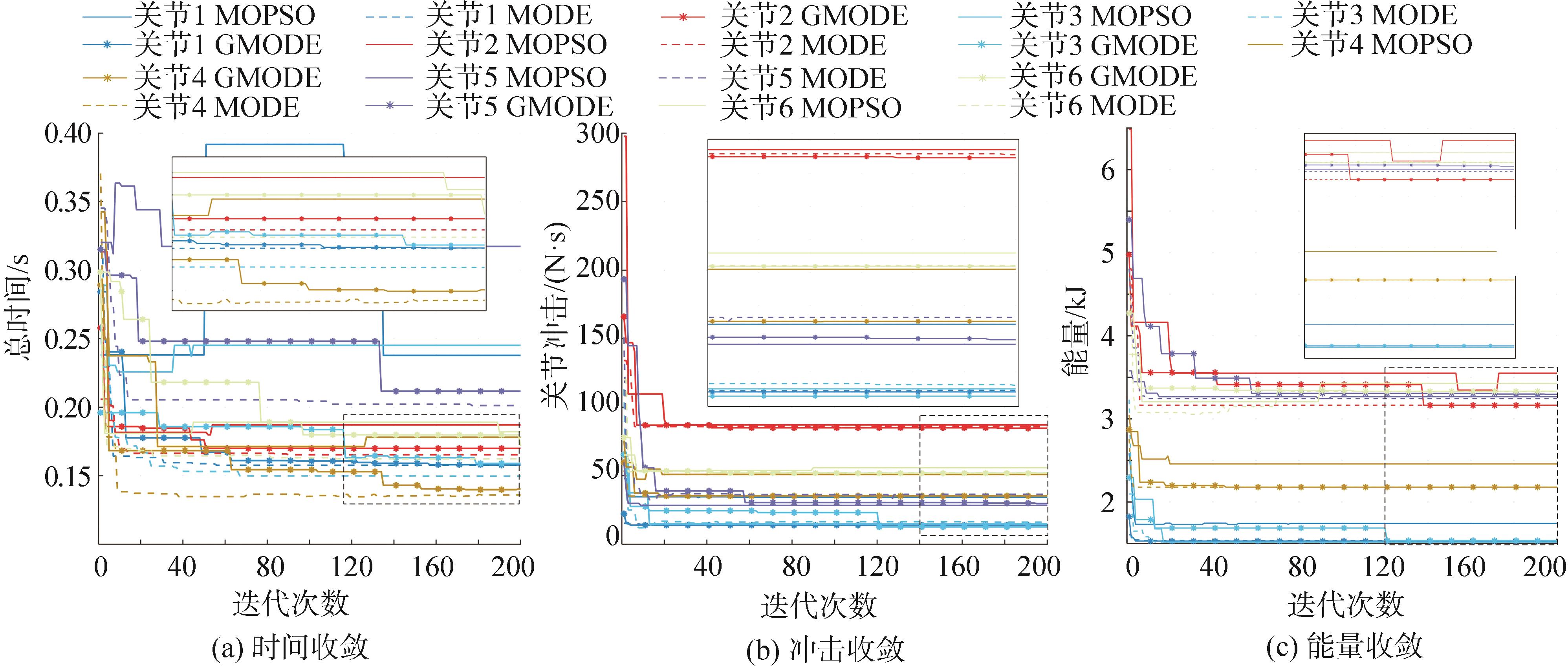

Fig. 13
Time, energy, and jerk curves for each joint under different algorithms with adaptive weighting
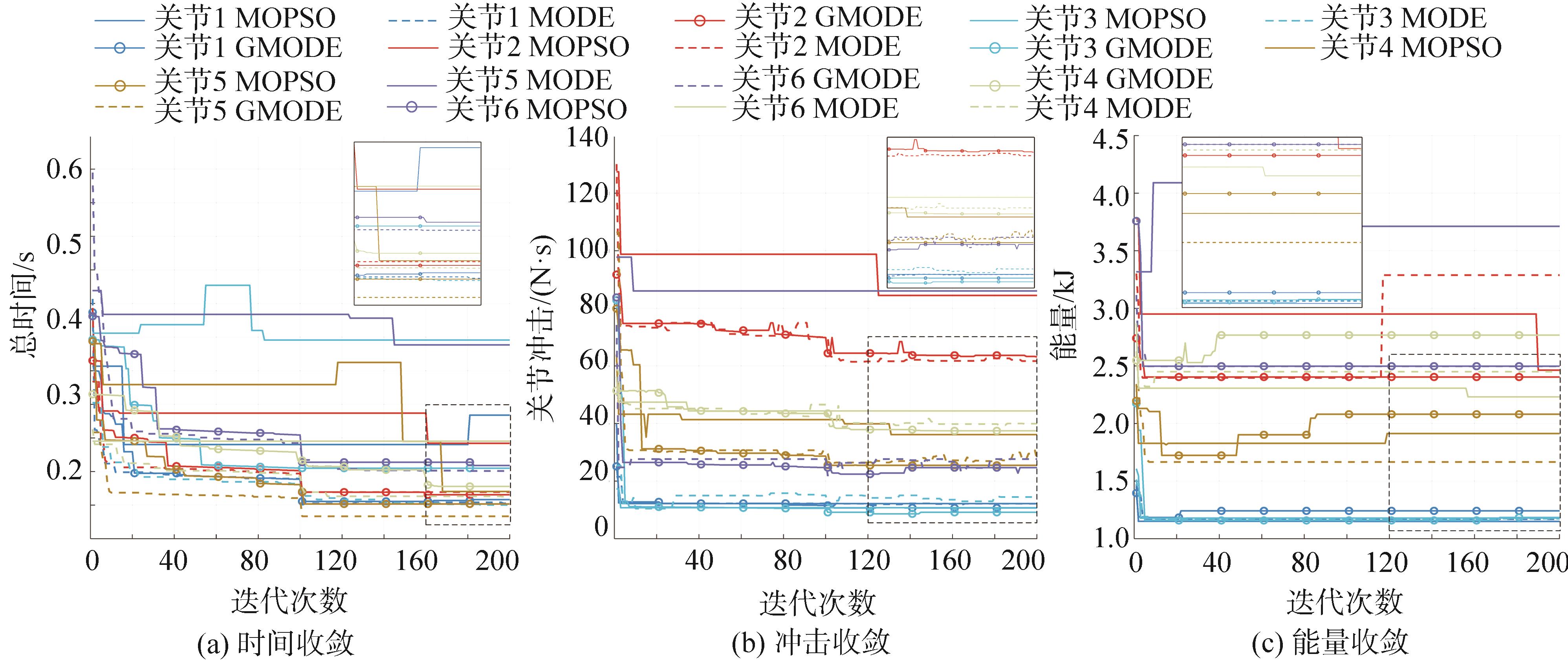
Table 5
Weight proportion verification
| 实验场景 | 时间权重 | 冲击权重 | 能量权重 | 评价指标 |
|---|---|---|---|---|
| 自设场景I | 0.50 | 0.35 | 0.15 | 59.079 1 |
| 自设场景II | 0.4 | 0.4 | 0.2 | 64.200 7 |
| 自设场景III | 0.8 | 0.1 | 0.1 | 25.633 1 |
| 平衡权重 | 1/3 | 1/3 | 1/3 | 60.373 8 |
| 时间优先 | 0.6 | 0.2 | 0.2 | 45.012 0 |
| 能量优先 | 0.2 | 0.2 | 0.6 | 52.256 4 |
| 冲击优先 | 0.2 | 0.6 | 0.2 | 95.544 5 |
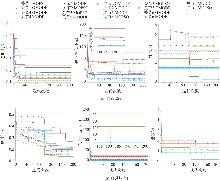
Fig. 14
Multi-objective optimization convergence curves under two weighting schemes
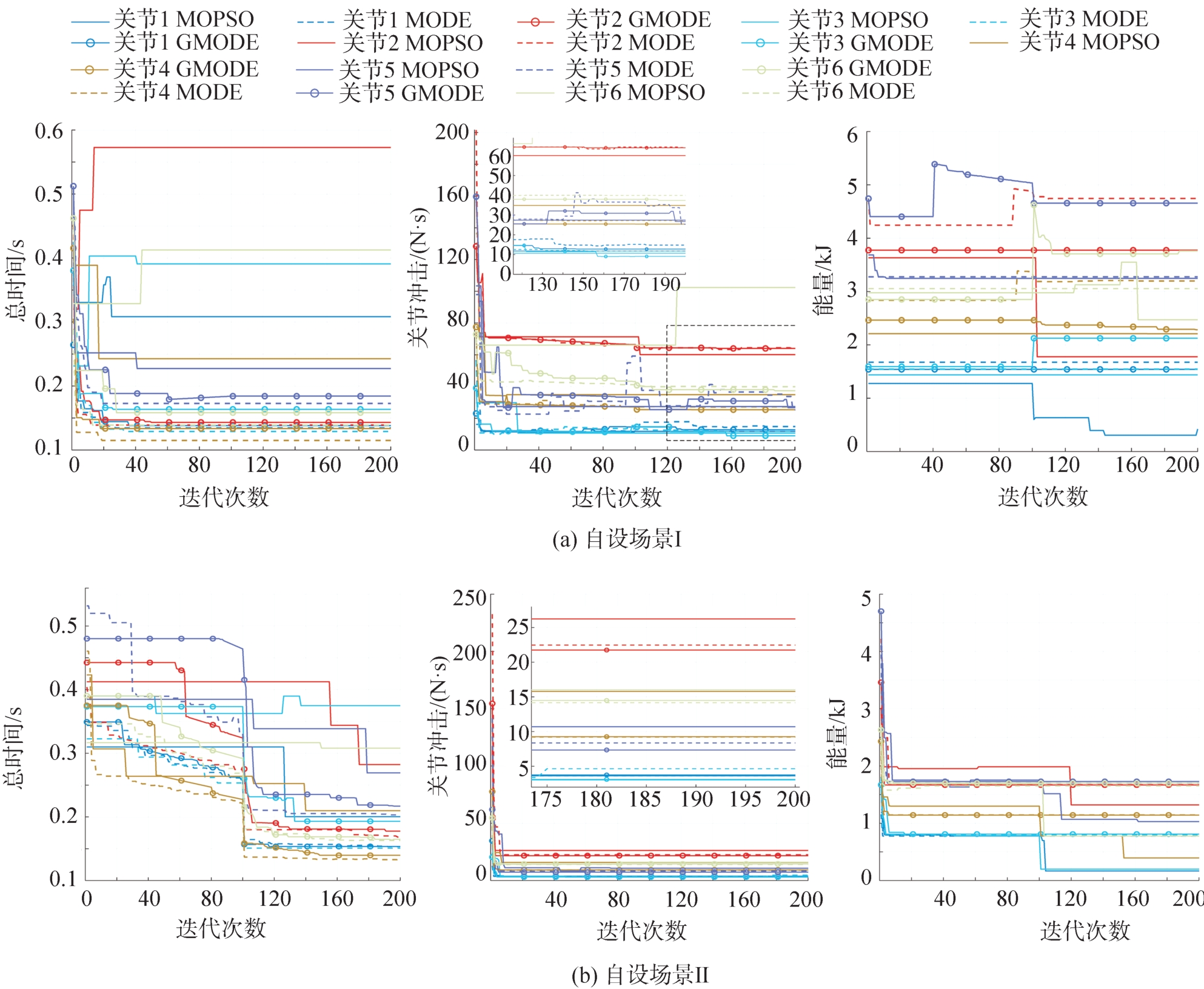
Table 6
D-H parameters of RS007L
| 连杆 | ||||
|---|---|---|---|---|
| 1 | 0.180 | 0.148 7 | -90 | |
| 2 | 0 | 0.180 0 | 0 | |
| 3 | 0 | 0.455 0 | -90 | |
| 4 | 0.475 | 0 | 90 | |
| 5 | 0 | 0 | -90 | |
| 6 | 0.078 | 0 | 0 |

Fig. 15
Motion process of robotic arm
Table 7
Joint angle scorre sponding to path point sof robotic arm
| 关节编号 | 起点 | 路径点1 | 路径点2 | 路径点3 | 终点 |
|---|---|---|---|---|---|
| 1 | -0.057 7 | -0.057 7 | -0.057 7 | -0.057 7 | -0.057 7 |
| 2 | -0.957 7 | -0.586 5 | -0.239 7 | -0.261 5 | -0.565 1 |
| 3 | 2.144 | 2.144 | 2.189 | 2.020 | 1.492 |
| 4 | -0.261 2 | -0.261 2 | -0.261 2 | -0.261 2 | -0.261 2 |
| 5 | 0.052 7 | 0.052 7 | 0.052 7 | 0.052 7 | 0.052 7 |
| 6 | 3.200 | 3.210 | 3.210 | 3.210 | 3.210 |
Fig. 16
Comparison of curves before and after changing objective weights
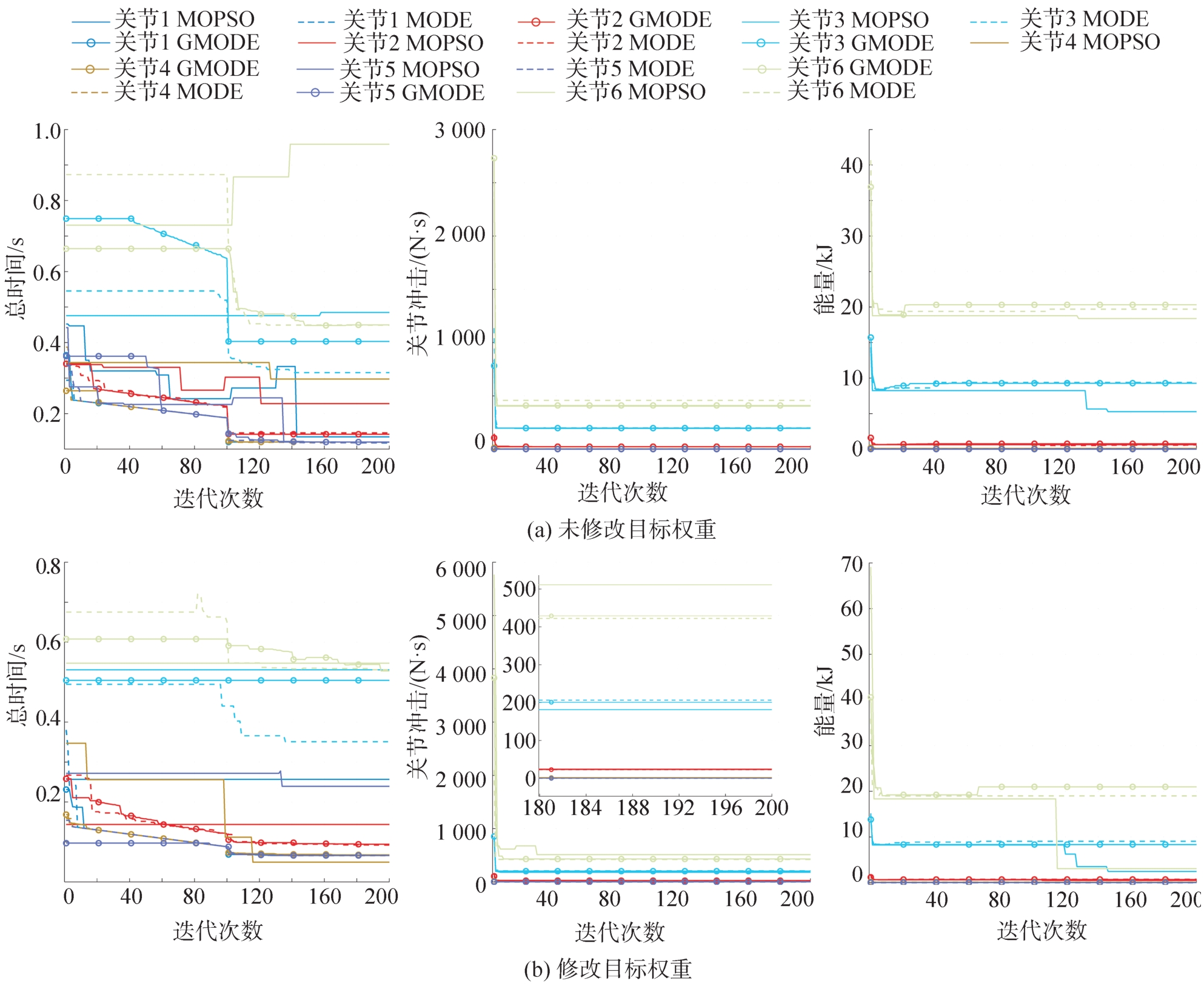
Table 8
Joint angle scorre sponding to path points
| 关节编号 | 起始点 | 路径点1 | 路径点2 | 终止点 |
|---|---|---|---|---|
| 1 | 0 | -0.184 6 | -0.368 6 | -0.392 7 |
| 2 | -1.570 8 | -1.827 9 | -1.554 5 | -1.047 2 |
| 3 | -0.785 4 | -0.066 4 | 0.558 2 | 0.523 6 |
| 4 | 1.047 2 | 1.168 4 | 0.773 1 | 0.392 7 |
| 5 | 0.523 6 | 0.734 1 | 0.740 5 | 0.523 6 |
| 6 | -0.523 6 | -0.767 1 | -0.974 7 | -0.785 4 |

Fig. 17
Numerical distribution of computational efficiency
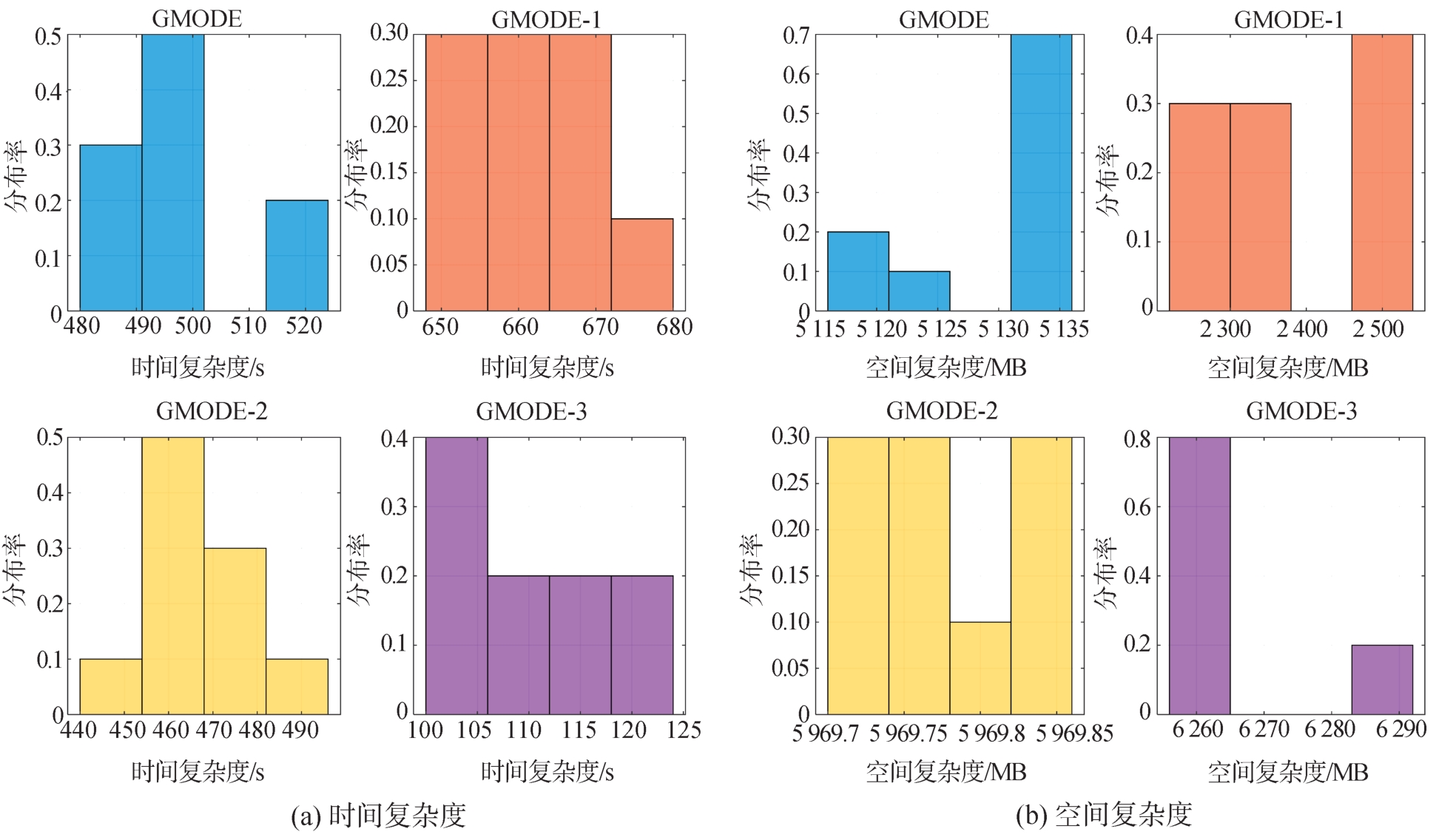
Table 9
Computational strategy verification
| 指标 | GMODE | GMODE-1 | GMODE-2 | GMODE-3 | |
|---|---|---|---|---|---|
时间 复杂度/s | Mean | 499.25 | 661.91 | 466.64 | 110.77 |
| Std | 11.34 | 7.92 | 13.14 | 7.12 | |
空间复 杂度/MB | Mean | 5 129.92 | 2 379.24 | 5 969.78 | 6 264.91 |
| Std | 6.51 | 100.46 | 0.05 | 12.72 | |
| 综合指标 | Mean | 0.489 8 | 0.428 3 | 0.512 8 | 0.353 3 |
| Std | 0.227 0 | 0.251 4 | 0.152 8 | 0.244 3 | |
| [1] | 李芳芳, 孙乾. 我国工业机器人发展现状的调查分析[J]. 机械传动, 2019, 43(6): 172-176. |
| Li Fangfang, Sun Qian. Investigation and Analysis of the Development Status of Industrial Robot of China[J]. Journal of Mechanical Transmission, 2019, 43(6): 172-176. | |
| [2] | Avram Oliver, Valente Anna. Trajectory Planning for Reconfigurable Industrial Robots Designed to Operate in a High Precision Manufacturing Industry[J]. Procedia CIRP, 2016, 57: 461-466. |
| [3] | 曹锦旗, 韩雪松. 工业机器人轨迹规划的研究方法综述[J]. 信息与控制, 2024, 53(4): 471-486, 498. |
| Cao Jinqi, Han Xuesong. A Review of Research Methods for Industrial Robot Trajectory Planning[J]. Information and Control, 2024, 53(4): 471-486, 498. | |
| [4] | Chen Haichu, Guo Chenglong, Wang Zhifeng, et al. The Trajectory Planning System for Spraying Robot Based on K-means Clustering and NURBS Curve Optimization[C]//IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE, 2020: 5356-5361. |
| [5] | Cong Yongzheng, Jiang Congrang, Liu Hui, et al. Research on Trajectory Planning Method of Dual-arm Robot Based on ROS[C]//2020 Chinese Automation Congress (CAC). Piscataway: IEEE, 2020: 2616-2621. |
| [6] | Li Xiangfei, Zhao Huan, He Xianming, et al. A Novel Cartesian Trajectory Planning Method by Using Triple NURBS Curves for Industrial Robots[J]. Robotics and Computer-Integrated Manufacturing, 2023, 83: 102576. |
| [7] | 王桂荣, 倪志强, 周坤, 等. 多策略改进粒子群算法的机械臂时间最优轨迹规划[J]. 中国机械工程, 2025, 36(5): 1044-1053. |
| Wang Guirong, Ni Zhiqiang, Zhou Kun, et al. Time-optimal Trajectory Planning of Robotic Arms Based on MIPSO Algorithm[J]. China Mechanical Engineering, 2025, 36(5): 1044-1053. | |
| [8] | 崔靖凯, 周宇飞, 贺顺锋, 等. 基于改进灰狼算法的冗余机械臂轨迹跟踪与避障[J]. 光学精密工程, 2023, 31(24): 3595-3605. |
| Cui Jingkai, Zhou Yufei, He Shunfeng, et al. Trajectory Tracking and Obstacle Avoidance of a Redundant Robotic Manipulator Based on the Improved Grey Wolf Optimizer[J]. Optics and Precision Engineering, 2023, 31(24): 3595-3605. | |
| [9] | Huang Junsen, Hu Pengfei, Wu Kaiyuan, et al. Optimal Time-jerk Trajectory Planning for Industrial Robots[J]. Mechanism and Machine Theory, 2018, 121: 530-544. |
| [10] | 荣誉, 陈刚, 豆天赐. 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(2): 305-316. |
| Rong Yu, Chen Gang, Dou Tianci. A Multi Index Comprehensive Optimal Anti Impact Trajectory Planning Method[J]. China Mechanical Engineering, 2024, 35(2): 305-316. | |
| [11] | Sharma Shubhkirti, Kumar Vijay. A Comprehensive Review on Multi-objective Optimization Techniques: Past, Present and Future[J]. Archives of Computational Methods in Engineering, 2022, 29(7): 5605-5633. |
| [12] | Rahimi Iman, Gandomi Amir H, Chen Fang, et al. A Review on Constraint Handling Techniques for Population-based Algorithms: From Single-objective to Multi-objective Optimization[J]. Archives of Computational Methods in Engineering, 2023, 30(3): 2181-2209. |
| [13] | 刘建林, 黄海松, 范青松, 等. 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究[J]. 中国机械工程, 2025, 36(9): 2047-2056. |
| Liu Jianlin, Huang Haisong, Fan Qingsong, et al. Multi-objective Trajectory Planning of Manipulators Based on Improved SSA[J]. China Mechanical Engineering, 2025, 36(9): 2047-2056. | |
| [14] | Storn R, Price K. DE-a Simple and Efficient Adaptive Scheme for Global Optimization Over Continuous Space[J]. Technical report, 1995, 25(6): 95-102. |
| [15] | 任旭阳, 卜旭辉, 尹艳玲, 等. 基于多策略多目标差分进化算法的风光储系统协调优化调度[J]. 系统仿真学报, 2025, 37(2): 450-461. |
| Ren Xuyang, Bu Xuhui, Yin Yanling, et al. Coordinated and Optimal Dispatching for Wind-photovoltaic-storage Systems Based on Multi-strategy Multi-objective Differential Evolution Algorithm[J]. Journal of System Simulation, 2025, 37(2): 450-461. | |
| [16] | 郑英, 吴泽华, 乔贵方, 等. 基于多目标差分算法的机器人几何参数辨识[J/OL]. 中国测试. (2025-05-15) [2025-06-24]. . |
| Zheng Ying, Wu Zehua, Qiao Guifang, et al. Robot Geometric Parameter Identification Method Based on Multi-objective Difference Algorithm[J/OL]. China Measurement & Test. (2025-05-15) [2025-06-24]. . | |
| [17] | Carl de Boor. A Practical Guide to Splines[M]. New York: Springer, 1978. |
| [18] | Das Swagatam, Sankha Subhra Mullick, Suganthan P N. Recent Advances in Differential Evolution-an Updated Survey[J]. Swarm and Evolutionary Computation, 2016, 27: 1-30. |
| [19] | Wang Liangying, Hong Lihuan, Fu Haoxuan, et al. Adaptive Distance-based Multi-objective Particle Swarm Optimization Algorithm with Simple Position Update[J]. Swarm and Evolutionary Computation, 2025, 94: 101890. |
| [20] | Nie Feiping, Zhang Runxin, Duan Yu, et al. Unconstrained Fuzzy C-means Based on Entropy Regularization: An Equivalent Model[J]. IEEE Transactions on Knowledge and Data Engineering, 2025, 37(2): 979-990. |
| [21] | Zhang Yadong, Wang Shaoping, Zio Enrico, et al. Multi-objective Maintenance Strategy for Complex Systems Considering the Maintenance Uncertain Impact by Adaptive Multi-strategy Particle Swarm Optimization[J]. Reliability Engineering & System Safety, 2025, 256: 110671. |
| [22] | Qian Shuqu, He Huihui, Wu Huihong, et al. A Hybrid Constrained Multi-objective Algorithm for Dynamic Economic Emission Dispatch[J]. International Journal of Electrical Power & Energy Systems, 2025, 169: 110711. |
| [23] | Wang Xin, Wang Xiang, Qin Bin. Improved Multi-objective Differential Evolution Algorithm and Its Application in the Capacity Configuration of Urban Rail Photovoltaic Hybrid Energy Storage Systems[J]. Journal of Energy Storage, 2024, 98, Part B: 113155. |
| [24] | Liu Yingfang, Sun Zhendong, Wang Yujie, et al. Capacity Configuration of Fuel Cell Hybrid Vehicles Using Enhanced Multi-objective Particle Swarm Optimization with Competitive Mechanism[J]. Energy Conversion and Management, 2024, 321: 119039. |
| [25] | R C Farias Lucas, F R Araújo Aluizio. IM-MOEA/D: An Inverse Modeling Multi-objective Evolutionary Algorithm Based on Decomposition[C]//2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Piscataway: IEEE, 2021: 462-467. |
| [26] | Li Jiale, Zhang Yuxuan, Wang Xuefei. Charging Station Localization and Sizing Determination Considering Smart Charging Strategies Based on NSGA-III and MOPSO[J]. Sustainable Cities and Society, 2025, 122: 106233. |
| [27] | Dai Cai, Wang Yuping, Ye Miao. A New Multi-objective Particle Swarm Optimization Algorithm Based on Decomposition[J]. Information Sciences, 2015, 325: 541-557. |
| [28] | Lin Qiuzhen, Liu Songbai, Zhu Qingling, et al. Particle Swarm Optimization with a Balanceable Fitness Estimation for Many-objective Optimization Problems[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(1): 32-46. |
| [29] | Abubakar Ali, Reindorf Nartey Borkor, Amoako-Yirenkyi Peter. Stochastic Optimal Harmonic Suppression with Permissible Photovoltaic Penetration Level for Grid-linked Systems Using Monte Carlo-based Hybrid NSGA-II-MOPSO[J]. Energy Systems, 2024: 1-35. |
| [30] | Maalouf Elie, Daaboul Joanna, Julien Le Duigou, et al. Production Management for Mass Customization and Smart Cellular Manufacturing System: NSGA-II and SMPSO for Factory-level Planning[J]. The International Journal of Advanced Manufacturing Technology, 2022, 120(9): 6833-6854. |
| [31] | Tian Ye, Cheng Ran, Zhang Xingyi, et al. PlatEMO: A MATLAB Platform for Evolutionary Multi-Objective Optimization [Educational Forum][J]. IEEE Computational Intelligence Magazine, 2017, 12(4): 73-87. |
| [32] | Tian Ye, Zhu Weijian, Zhang Xingyi, et al. A Practical Tutorial on Solving Optimization Problems Via PlatEMO[J]. Neurocomputing, 2023, 518: 190-205. |
| [33] | 隋涛, 姜昊, 孔刘君, 等. 基于改进粒子群算法的机械臂轨迹规划研究[J]. 沈阳理工大学学报, 2023, 42(1): 7-12. |
| Sui Tao, Jiang Hao, Kong Liujun, et al. Research on Manipulator Trajectory Planning Based on Improved Particle Swarm Optimization Algorithm[J]. Journal of Shenyang Ligong University, 2023, 42(1): 7-12. |
| [1] | Chen Zhirun, Yuan Jie, Jia Erkenbieke, Zhang Ningning, Liu Chao, Ye Yushan. Adaptive Path Planning for Robotic Arms Integrating RRT* and APF [J]. Journal of System Simulation, 2026, 38(6): 1669-1683. |
| [2] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [3] | Liang Binhao, Wei Jingxuan, Liang Fengqin. Large-scale Multi-objective Evolutionary Algorithm Based on Multi-region Dynamic Grouping [J]. Journal of System Simulation, 2026, 38(4): 974-987. |
| [4] | Zhang Ziyao, Ji Yunfeng. Simulation of Robotic Arm Ball-catching Strategy Based on Curriculum RL of Transformer [J]. Journal of System Simulation, 2026, 38(2): 321-331. |
| [5] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [6] | Chen Tao, Liu Jianxuan, Wang Lizhong, Zou Xiangjun, Li Xiaojuan. Research on Non-singular Fast Integral Terminal Sliding Mode Trajectory Tracking Control of Six-axis Robotic Arm [J]. Journal of System Simulation, 2025, 37(8): 2115-2123. |
| [7] | Chen Juan, Zheng Wang, Liu Qianqian, Lu Bin. Automatic Multi-objective Optimization Based on Dynamic Storage Location Allocation Strategy [J]. Journal of System Simulation, 2025, 37(6): 1435-1448. |
| [8] | Wu Zisong, Chang Daofang, Gai Yuchun. Optimization of Cargo Location Allocation in Four-way Shuttle Warehousing System Based on Two-stage Hybrid Algorithm [J]. Journal of System Simulation, 2025, 37(5): 1234-1245. |
| [9] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| [10] | Xu Qiang, Xu Jianlei, Hu Yanhai, Chen Haihui, Zhang Xing, Xing Zhaohui. Trajectory Optimization of Robotic Arm Based on Improved Simulated Annealing Genetic Algorithm [J]. Journal of System Simulation, 2025, 37(2): 404-412. |
| [11] | Liu Xiang, Jin Qiankun. Research on PAC-Bayes-Based A2C Algorithm for Multi-objective Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(12): 3212-3223. |
| [12] | Ding Xinhuan, Wang Huaqing, Dang Xu. Multi-objective Optimization of Signal Timing at Intersections Considering Tailpipe Emissions [J]. Journal of System Simulation, 2025, 37(10): 2687-2700. |
| [13] | Wang Zhu, Zhang Zhenpeng, Zhang Mengtong, Xu Guangtong. Sequential Convex Programming Using Safe Flight Corridor for Trajectory Planning of UAVs [J]. Journal of System Simulation, 2025, 37(1): 134-144. |
| [14] | Wang Ke, Guan Sijia, Xiyan Yin, Li Xixing, Tang Hongtao. Research on Mixed-model Assembly Line Balancing Optimization Based on Hybrid Genetic Tabu Search Algorithm [J]. Journal of System Simulation, 2025, 37(1): 167-182. |
| [15] | Li Feixing, Xing Lining, Zhou Yu. Adversarial Simulation Testing Algorithm for SVM Based on Multi-objective Evolutionary Optimization [J]. Journal of System Simulation, 2024, 36(9): 2016-2031. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
