

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (2): 321-331.doi: 10.16182/j.issn1004731x.joss.25-0768
• Machine Learning Algorithms • Previous Articles Next Articles
Zhang Ziyao1, Ji Yunfeng2
Received:2025-08-12
Revised:2025-09-22
Online:2026-02-18
Published:2026-02-11
Contact:
Ji Yunfeng
CLC Number:
Zhang Ziyao, Ji Yunfeng. Simulation of Robotic Arm Ball-catching Strategy Based on Curriculum RL of Transformer[J]. Journal of System Simulation, 2026, 38(2): 321-331.
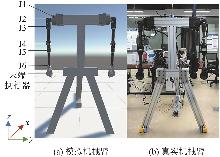
Fig. 1
Robotic arms
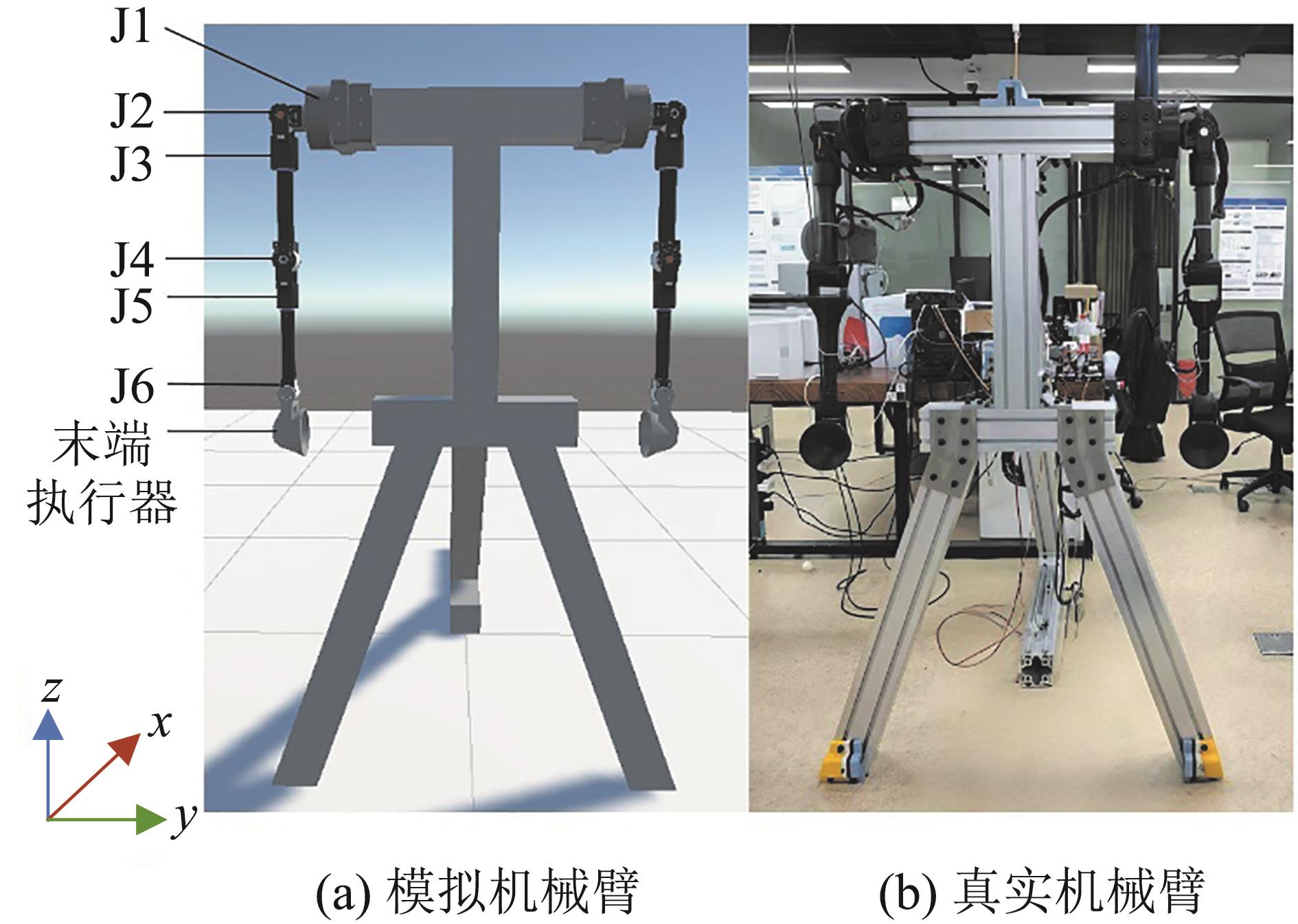
Table 1
Motion space for robotic arms
| 关节 | 旋转轴 | 旋转上下限/(°) | 速度上下限/((°)/s) |
|---|---|---|---|
| J1 | y | 90, -60 | 120, 0 |
| J2 | x | 50, -15 | 80, 0 |
| J3 | z | 180, 0 | 80, 0 |
| J4 | x | 105, -90 | 80, 0 |
| J5 | z | 179, -179 | 80, 0 |
| J6 | x | 100, -100 | 80, 0 |
Fig. 2
Network architecture of PPO-Transformer algorithm
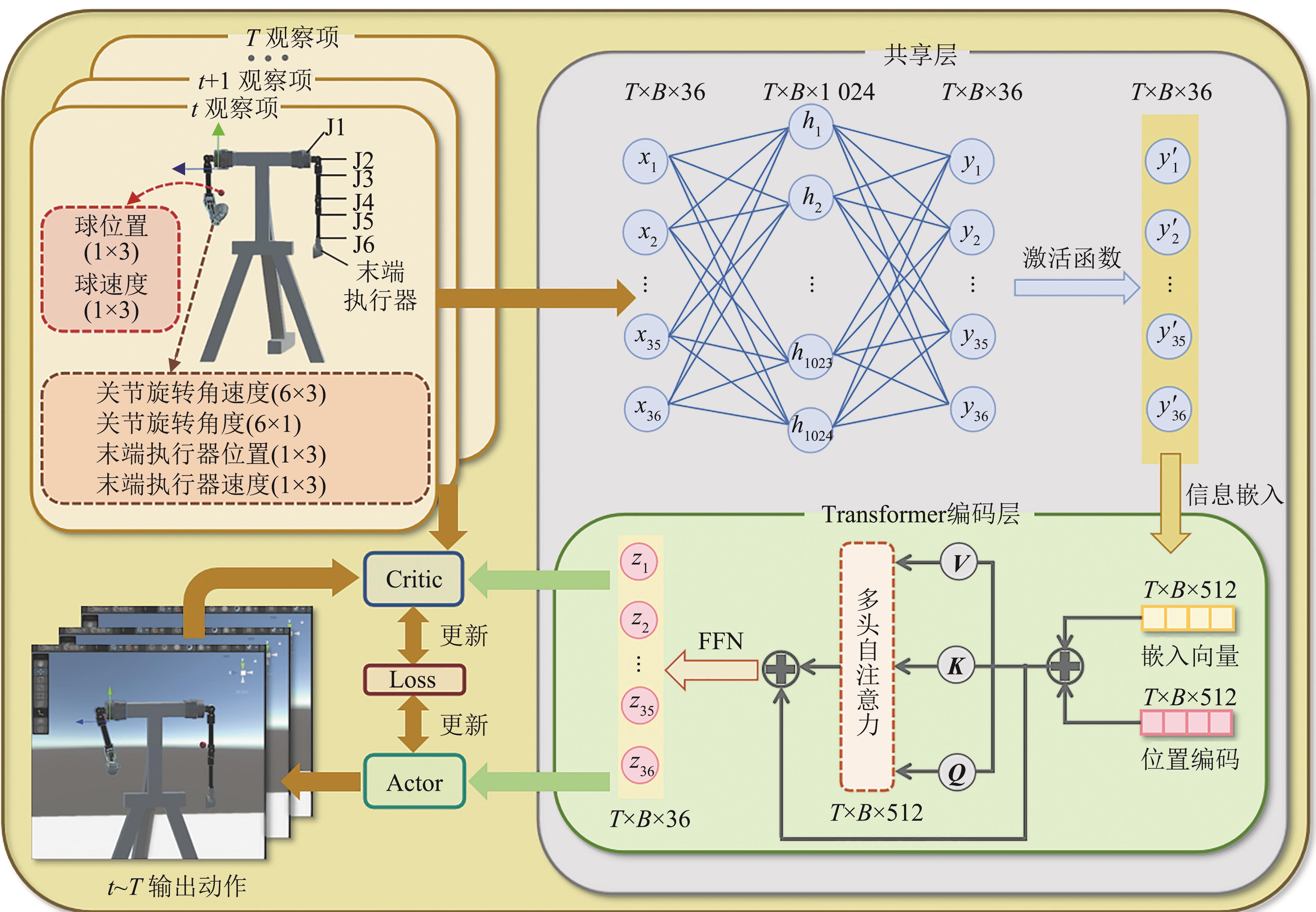

Fig. 3
Update process of PPO algorithm
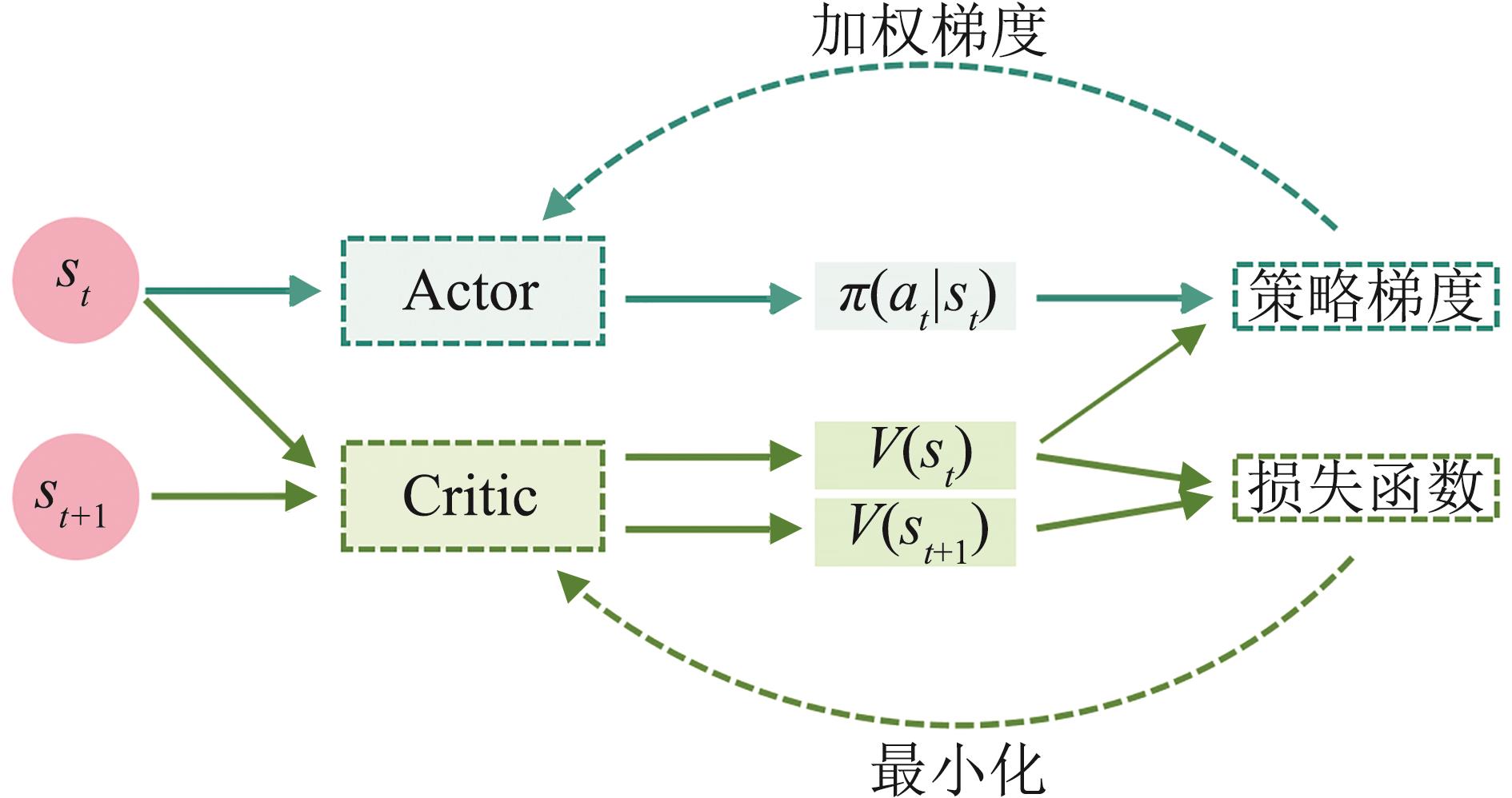

Fig. 4
Curriculum learning
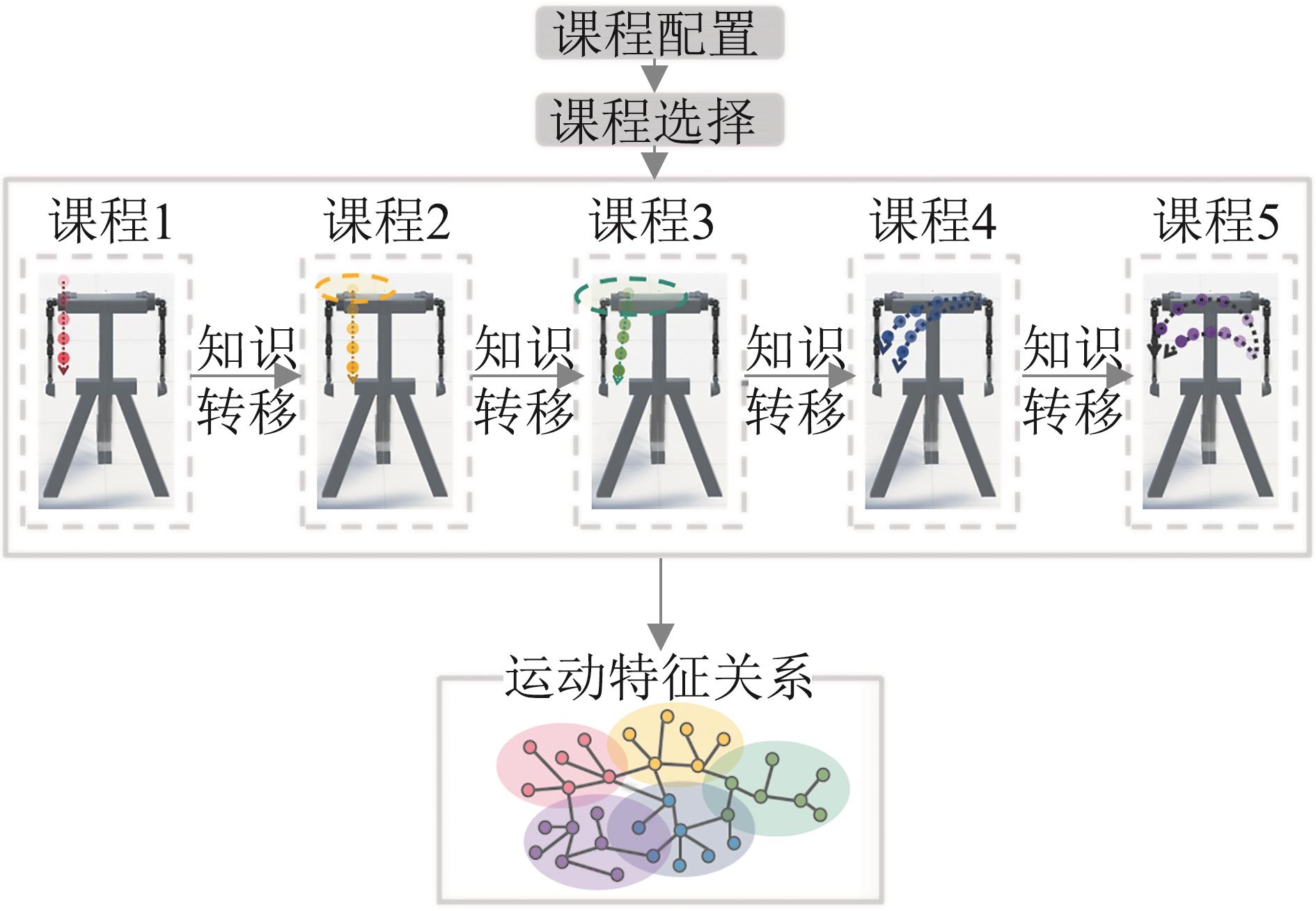
Fig. 5
Components involved in reward function calculation
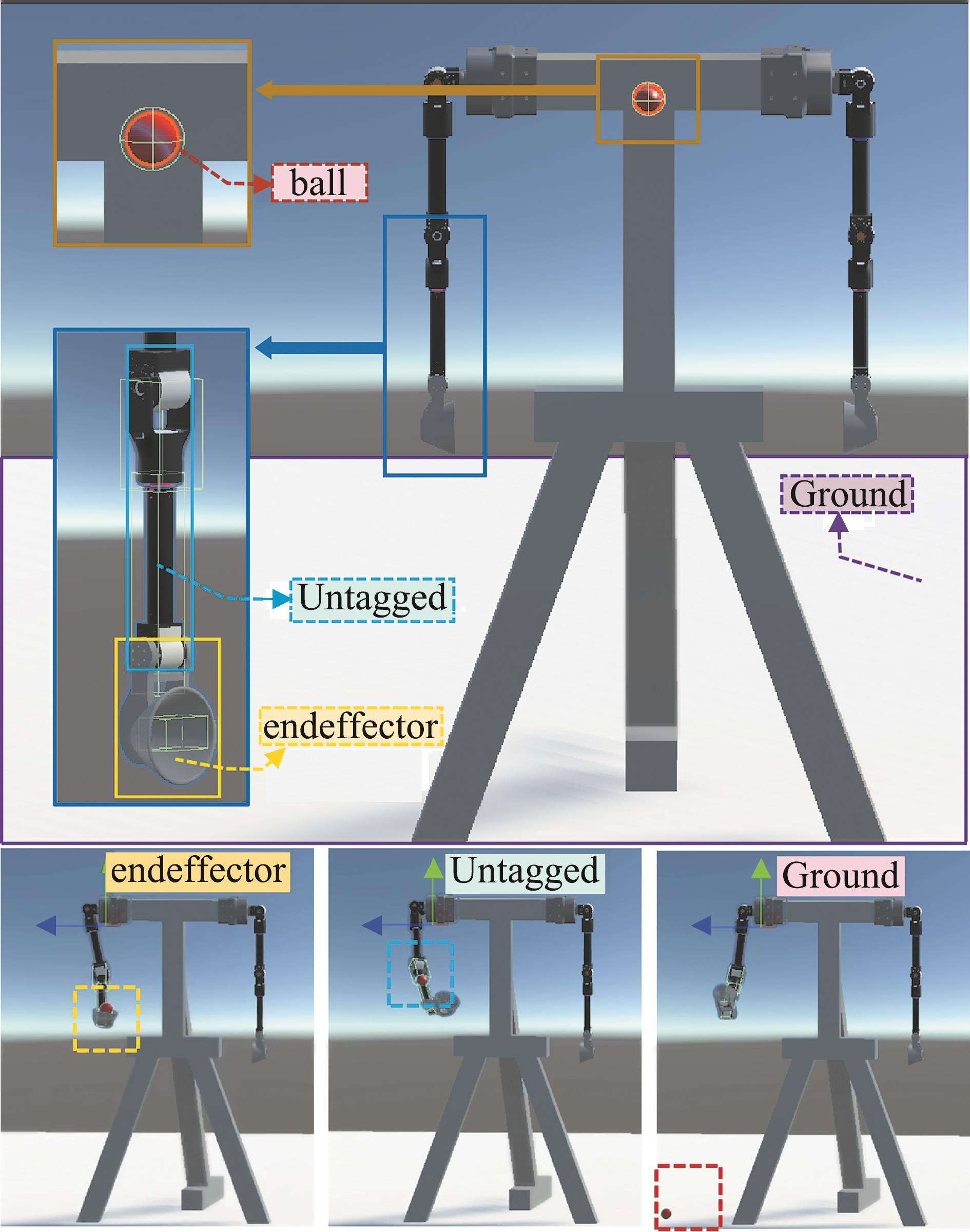
Table 2
Parameters and values in configuration files
| 参数名称 | 定义 | 取值 |
|---|---|---|
| batch_size | 缓存池采样用于更新模型的样本数量 | 256 |
| buffer_size | 缓存池里面的样本数量 | 4 096 |
| learning_rate | 学习率 | 0.000 1 |
| beta | 策略熵正则化稀疏 | 0.02 |
| epsilon | 剪切范围系数 | 0.2 |
| hidden_units | 隐藏单元 | 256 |
| max_steps | 训练次数 | 30×105 |
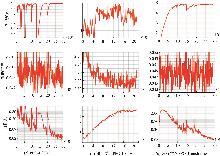
Fig. 6
Experimental data of three different RL strategy networks
Table 3
Descriptive statistics of ball-catching success rates
| 算法 | 均值±标准差 | 95%置信区间 |
|---|---|---|
| PPO-LSTM | 30.2±4.5 | [27.1, 33.3] |
| 课程学习PPO-LSTM | 60.5±5.2 | [57.2, 63.8] |
| 课程学习PPO-Transformer | 90.3±3.8 | [88.0, 92.6] |
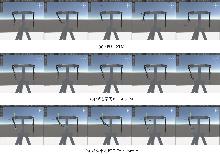
Fig. 7
Execution results of different RL strategy networks

Fig. 8
Trajectory comparison of real balls and balls imported into simulated environment
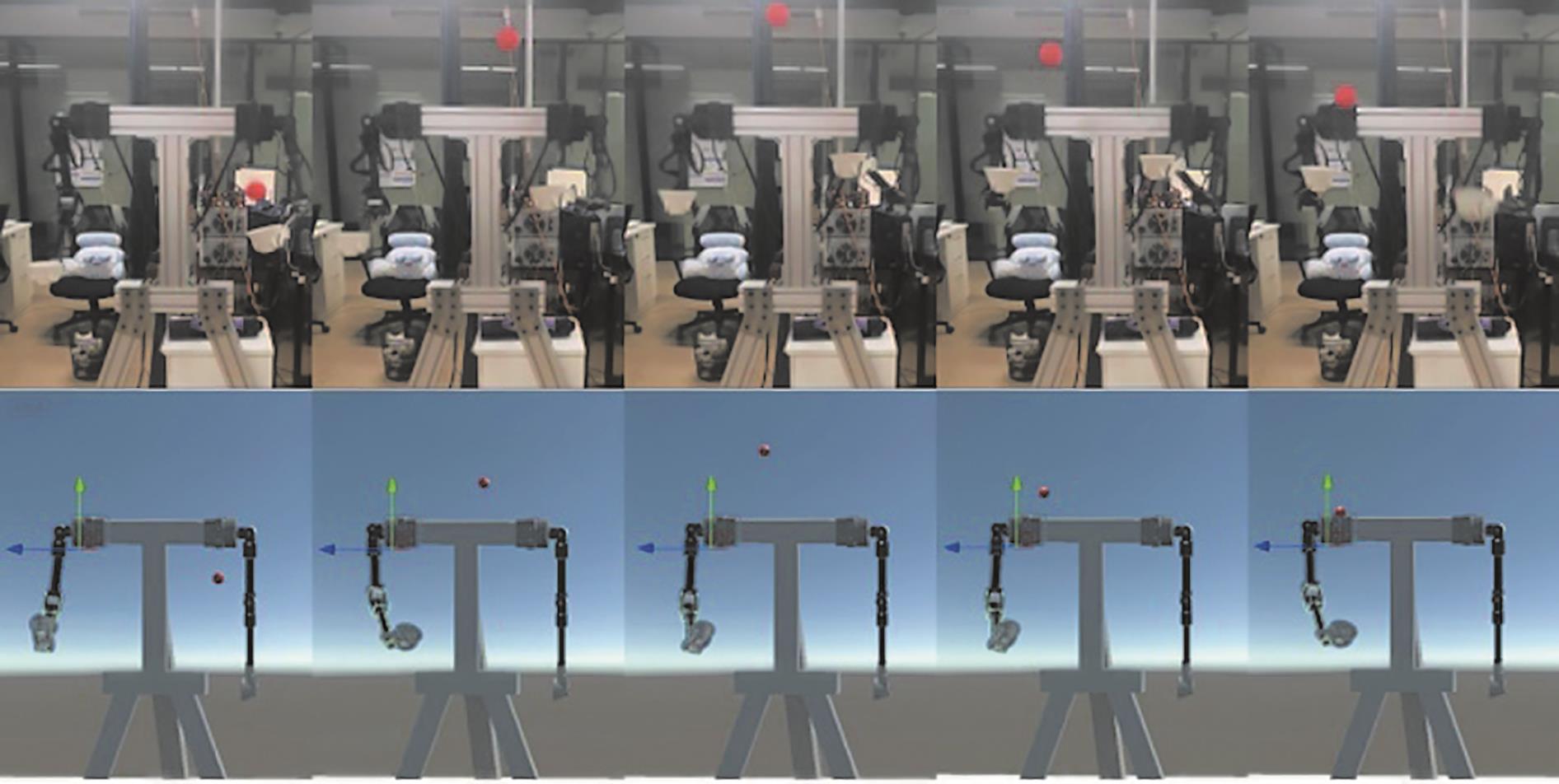
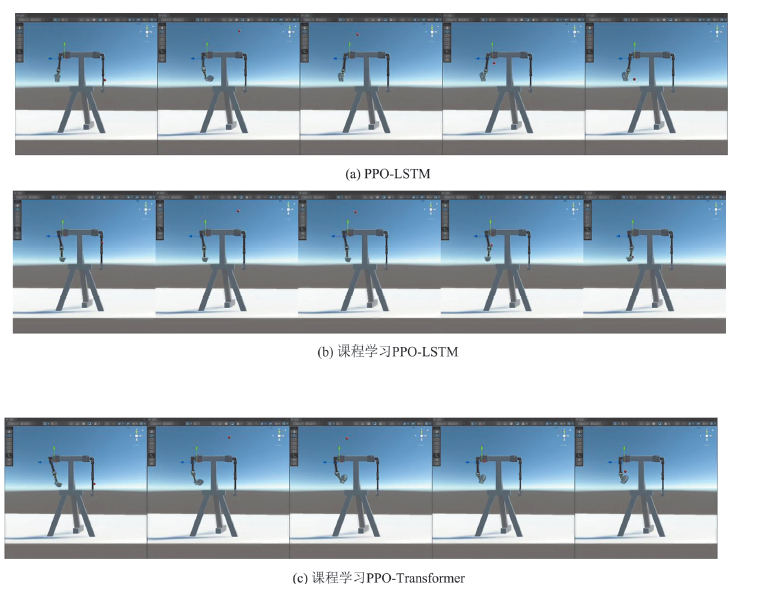
Fig. 9
Execution results of Real2Sim for different RL strategy networks
| [1] | Bombile Michael, Billard Aude. Bimanual Dynamic Grabbing and Tossing of Objects onto a Moving Target[J]. Robotics and Autonomous Systems, 2023, 167: 104481. |
| [2] | Mao Xiaofeng, Xu Yucheng, Wen Ruoshi, et al. Efficient Tactile Sensing-based Learning from Limited Real-world Demonstrations for Dual-arm Fine Pinch-grasp Skills[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2024: 5112-5119. |
| [3] | Delp S L, Anderson F C, Arnold A S, et al. OpenSim: Open-source Software to Create and Analyze Dynamic Simulations of Movement[J]. IEEE Transactions on Biomedical Engineering, 2007, 54(11): 1940-1950. |
| [4] | Li Chengxi, Zheng Pai, Yin Yue, et al. An AR-assisted Deep Reinforcement Learning-based Approach Towards Mutual-cognitive Safe Human-robot Interaction[J]. Robotics and Computer-Integrated Manufacturing, 2023, 80: 102471. |
| [5] | Gold Tobias, Völz Andreas, Graichen Knut. Model Predictive Interaction Control for Industrial Robots[J]. IFAC-PapersOnLine, 2020, 53(2): 9891-9898. |
| [6] | Wu Changjie, Tang Xiaolong, Xu Xiaoyan. Model Predictive Controller Design Based on Residual Model Trained by Gaussian Process for Robots[J]. Journal of Marine Science and Engineering, 2023, 11(5): 893. |
| [7] | Ploeger Kai, Peters Jan. Controlling the Cascade: Kinematic Planning for N-ball Toss Juggling[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2022: 1139-1144. |
| [8] | Callado Tomás, Farooqi H, Gupta T, et al. Using Closed Feedback Loops to Evaluate Autonomous Juggling Performance[C]//2020 IEEE MIT Undergraduate Research Technology Conference (URTC). Piscataway: IEEE, 2020: 1-4. |
| [9] | Aşık Okan, Görer Binnur, Levent Akın H. End-to-end Deep Imitation Learning: Robot Soccer Case Study[C]//RoboCup 2018: Robot World Cup XXII. Cham: Springer International Publishing, 2019: 137-149. |
| [10] | Serra Diana, Ruggiero Fabio, Lippiello Vincenzo, et al. A Nonlinear Least Squares Approach for Nonprehensile Dual-hand Robotic Ball Juggling[J]. IFAC-PapersOnLine, 2017, 50(1): 11485-11490. |
| [11] | Georg Rudolf Sebastian Bätz. Planning and Control Methods for Robotic Manipulation Tasks with Non-negligible Dynamics[D]. München: Technische Universität München, 2011. |
| [12] | Wang Jiwu, Xu Junxiang. Kinematic Modeling and Simulation of Dual-arm Robot[J]. Journal of Robotics, Networking and Artificial Life, 2021, 8(1): 56-59. |
| [13] | Tusset Angelo M, Amarildo E B Pereira, Balthazar Jose M, et al. Positioning Control of Robotic Manipulators Subject to Excitation from Non-ideal Sources[J]. Robotics, 2023, 12(2): 51. |
| [14] | 祁若龙, 张珂, 周维佳, 等. 机械臂高斯运动轨迹规划及操作成功概率预估计方法[J]. 机械工程学报, 2019, 55(1): 42-51. |
| Qi Ruolong, Zhang Ke, Zhou Weijia, et al. Trajectory Planning and Success Probability Estimation of Operation for Gaussian Motion Manipulators[J]. Journal of Mechanical Engineering, 2019, 55(1): 42-51. | |
| [15] | Dler Salih Hasanc, Nazhad Ahmad Husseinb, SerwerYouns Sara. Kinematic Workspace Modelling of Two Links Robotic Manipulator[J]. Anbar Journal of Engineering Science, 2020, 11(1): 19-24. |
| [16] | Yang Shibao, Liu Pengcheng, Pears N. Benchmarking of Robot Arm Motion Planning in Cluttered Environments[C]//2023 28th International Conference on Automation and Computing (ICAC). Piscataway: IEEE, 2023: 1-6. |
| [17] | Mario Gomez Andreu, Ploeger Kai, Peters Jan. Beyond the Cascade: Juggling Vanilla Siteswap Patterns[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2024: 2928-2934. |
| [18] | Schulman J, Wolski F, Dhariwal P, et al. Proximal Policy Optimization Algorithms[EB/OL]. (2017-08-28) [2025-06-08]. . |
| [19] | Lindner Tymoteusz, Milecki Andrzej. Reinforcement Learning-based Algorithm to Avoid Obstacles by the Anthropomorphic Robotic Arm[J]. Applied Sciences, 2022, 12(13): 6629. |
| [20] | Chamorro Simon, Klemm Victor, Miguel de La Iglesia Valls, et al. Reinforcement Learning for Blind Stair Climbing with Legged and Wheeled-legged Robots[C]//2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2024: 8081-8087. |
| [21] | Schulman J, Levine S, Abbeel P, et al. Trust Region Policy Optimization[C]//Proceedings of the 32nd International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2015: 1889-1897. |
| [22] | Miller A J, Fahmi S, Chignoli M, et al. Reinforcement Learning for Legged Robots: Motion Imitation from Model-based Optimal Control[EB/OL]. (2023-05-18) [2025-06-08]. . |
| [23] | Mnih V, Kavukcuoglu K, Silver D, et al. Playing Atari with Deep Reinforcement Learning[EB/OL]. (2013-12-19) [2025-06-08]. . |
| [24] | Haarnoja T, Zhou A, Abbeel P, et al. Soft Actor-critic: Off-policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor[C]//Proceedings of the 35th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2018: 1861-1870. |
| [25] | Wong C C, Chien S Y, Feng H M, et al. Motion Planning for Dual-arm Robot Based on Soft Actor-critic[J]. IEEE Access, 2021, 9: 26871-26885. |
| [26] | Chen Yuanpei, Wu Tianhao, Wang Shengjie, et al. Towards Human-level Bimanual Dexterous Manipulation with Reinforcement Learning[C]//Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2022: 5150-5163. |
| [27] | Hu Xiaoyi, Mao Yue, Wang Gang, et al. Catching Spinning Table Tennis Balls in Simulation with End-to-end Curriculum Reinforcement Learning[J]. Engineering Applications of Artificial Intelligence, 2025, 158, Part A: 111285. |
| [28] | Vaswani A, Shazeer N, Parmar N, et al. Attention Is All You Need[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| [29] | Bengio Yoshua, Louradour Jérôme, Collobert R, et al. Curriculum Learning[C]//Proceedings of the 26th annual international conference on machine learning. New York: Association for Computing Machinery, 2009: 41-48. |
| [30] | Graves Alex. Long Short-term Memory[C]//Alex Graves. Supervised Sequence Labelling with Recurrent Neural Networks. Berlin: Springer Berlin Heidelberg, 2012: 37-45. |
| [1] | Mei Huawei, Yang Penghui, Yu Yang. Ultra-short-term Photovoltaic Power Prediction Based on Improved PatchTST Considering Data Drift [J]. Journal of System Simulation, 2026, 38(5): 1239-1254. |
| [2] | Tao Ye, Tang Jinhui, Zhou Chen, Wang Chong. Research on Completion Method for Trajectory Based on Image Representation and Collaborative Feature Perception [J]. Journal of System Simulation, 2026, 38(5): 1333-1349. |
| [3] | Qin Long, Huang Hesong, Yin Lujia, Ai Chuan, Zhang Qi, Li Xinmeng. Intelligent Competition Platform and Mode Driven by Cloud-native Simulation [J]. Journal of System Simulation, 2026, 38(4): 988-1003. |
| [4] | Wu Shuxia, Zhang Junjie, Chen Delong, Chen Zheyi. Resource-efficient Continuous Learning Framework for Edge Real-time Video Analytics [J]. Journal of System Simulation, 2026, 38(2): 294-306. |
| [5] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [6] | Liu Quan, Wang Yu, Liu Linyue, Chen Hao, Huang Jian. Knowledge Closed-loop Driving-based Intelligent Game Confrontation Simulation [J]. Journal of System Simulation, 2026, 38(2): 416-432. |
| [7] | Xu Risheng, Yang Linyao, Qin Yuanqi, Wang Xiao, Sun Changyin. Knowledge-enhanced LLM-based Method for Regional Traffic Signal Control [J]. Journal of System Simulation, 2026, 38(2): 518-531. |
| [8] | Zou Jing, Tan Xu, Mao Junji, Gao Haidong, Tan Jianrong. Defect Detection Method Based on Hierarchical Microscopic Feature Modeling and Simulation [J]. Journal of System Simulation, 2026, 38(1): 1-13. |
| [9] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [10] | Zhang Shuozhe, Song Wenfeng, Hou Xia, Li Shuai. Full-body Co-speech Gesture Generation Based on Spatial-temporal Enhanced Generation Model [J]. Journal of System Simulation, 2026, 38(1): 211-224. |
| [11] | Zhu Yuning, Yang Meng, Chen Tianyue, Meng Weiliang. VRBT: VR Badminton Training with Multitask Injury Alerts based on Lightweight 3D Skeletal Reconstruction [J]. Journal of System Simulation, 2026, 38(1): 225-234. |
| [12] | Zhang Wei, Sheng Wei, Cao Yidan, Zhao Tingsheng. Research on 3D Visualization of Safety Monitoring and Early Warning for Steel Continuous Casting Scenarios [J]. Journal of System Simulation, 2025, 37(8): 1991-2003. |
| [13] | Xie Yong, Gao Hailong, Chen Yutao, Wang Huanjiang. Optimization of Product Oil Distribution with Multiple Trips and Multiple Due Dates under Dynamic Demand [J]. Journal of System Simulation, 2025, 37(8): 2016-2029. |
| [14] | Chen Tao, Liu Jianxuan, Wang Lizhong, Zou Xiangjun, Li Xiaojuan. Research on Non-singular Fast Integral Terminal Sliding Mode Trajectory Tracking Control of Six-axis Robotic Arm [J]. Journal of System Simulation, 2025, 37(8): 2115-2123. |
| [15] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
