

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (5): 1466-1483.doi: 10.16182/j.issn1004731x.joss.25-0541
Qin Lang1,2, Xie Jiacheng1,2, Qiao Xiaojun1,3, Wang Xuewen1,2, Xiao Zhijie1,2
Received:2025-06-10
Revised:2025-08-19
Online:2026-05-21
Published:2026-05-29
Contact:
Wang Xuewen
CLC Number:
Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator[J]. Journal of System Simulation, 2026, 38(5): 1466-1483.
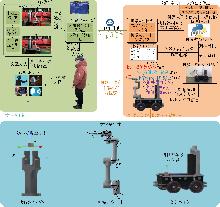
Fig. 1
Technical roadmap
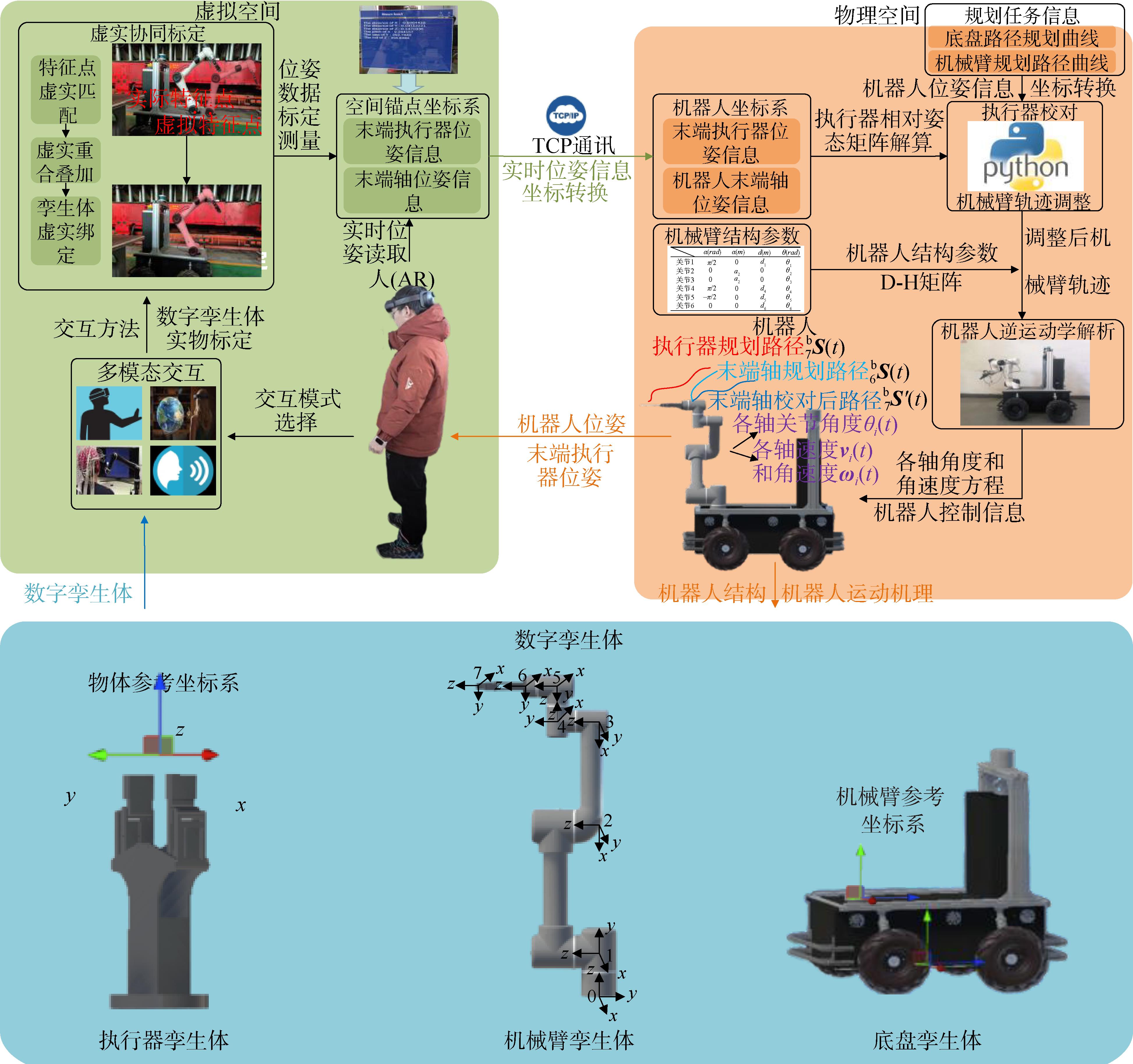
Fig. 2
Adaptive adjustment of robot trajectories
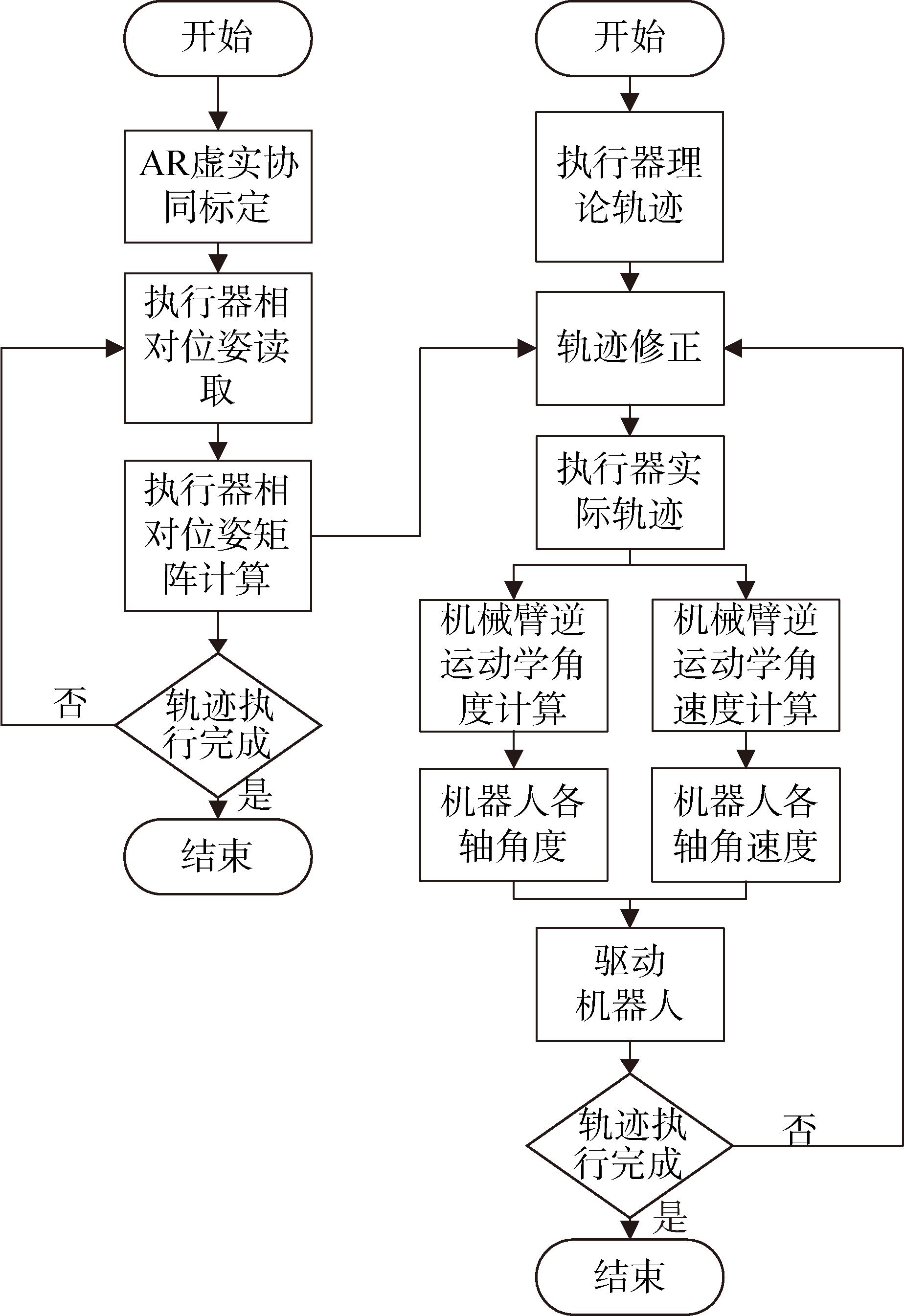
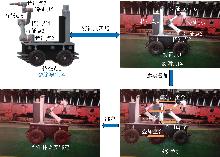
Fig. 3
Virtual-real collaborative calibration
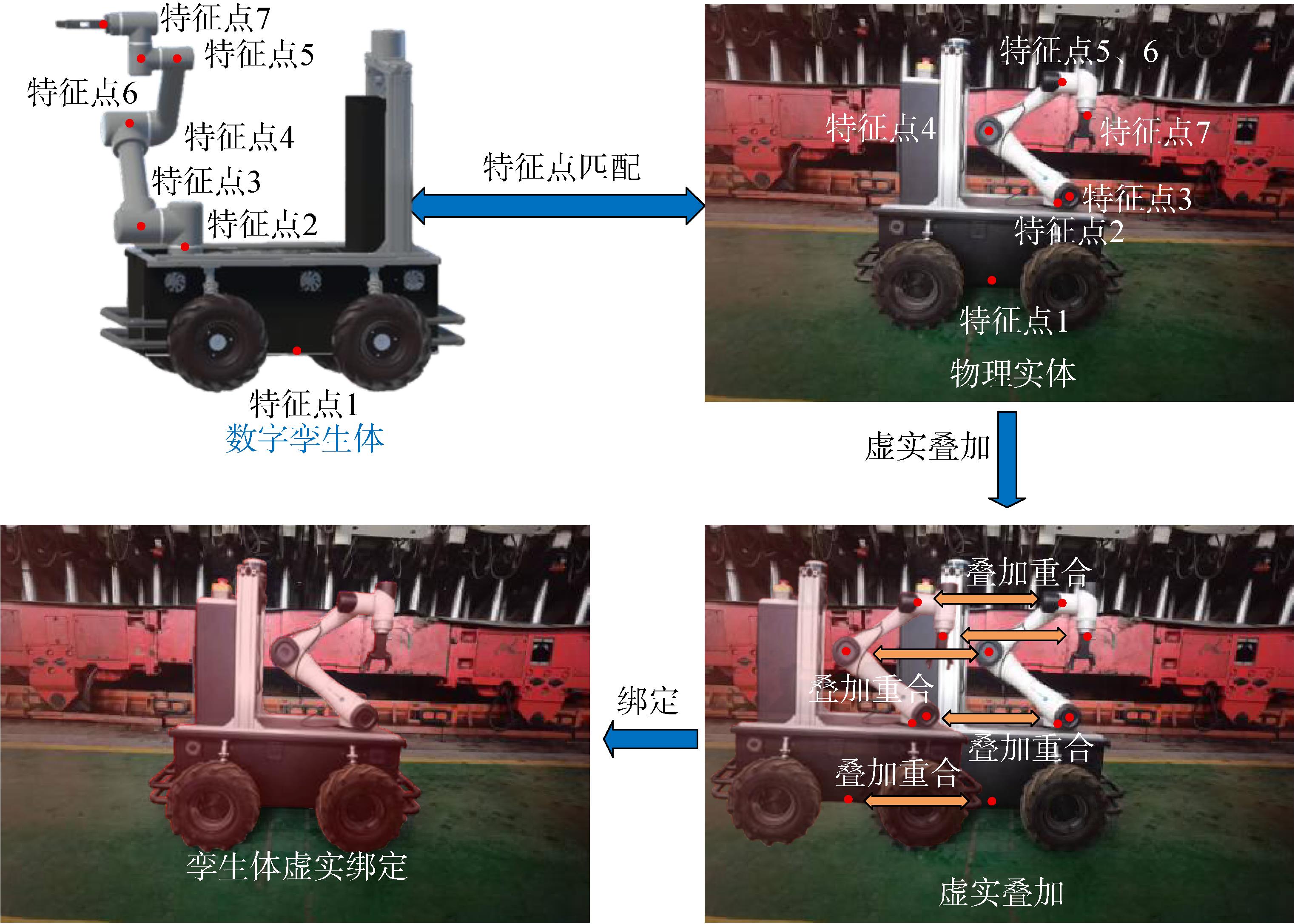
Fig. 4
Actuator calibration planning
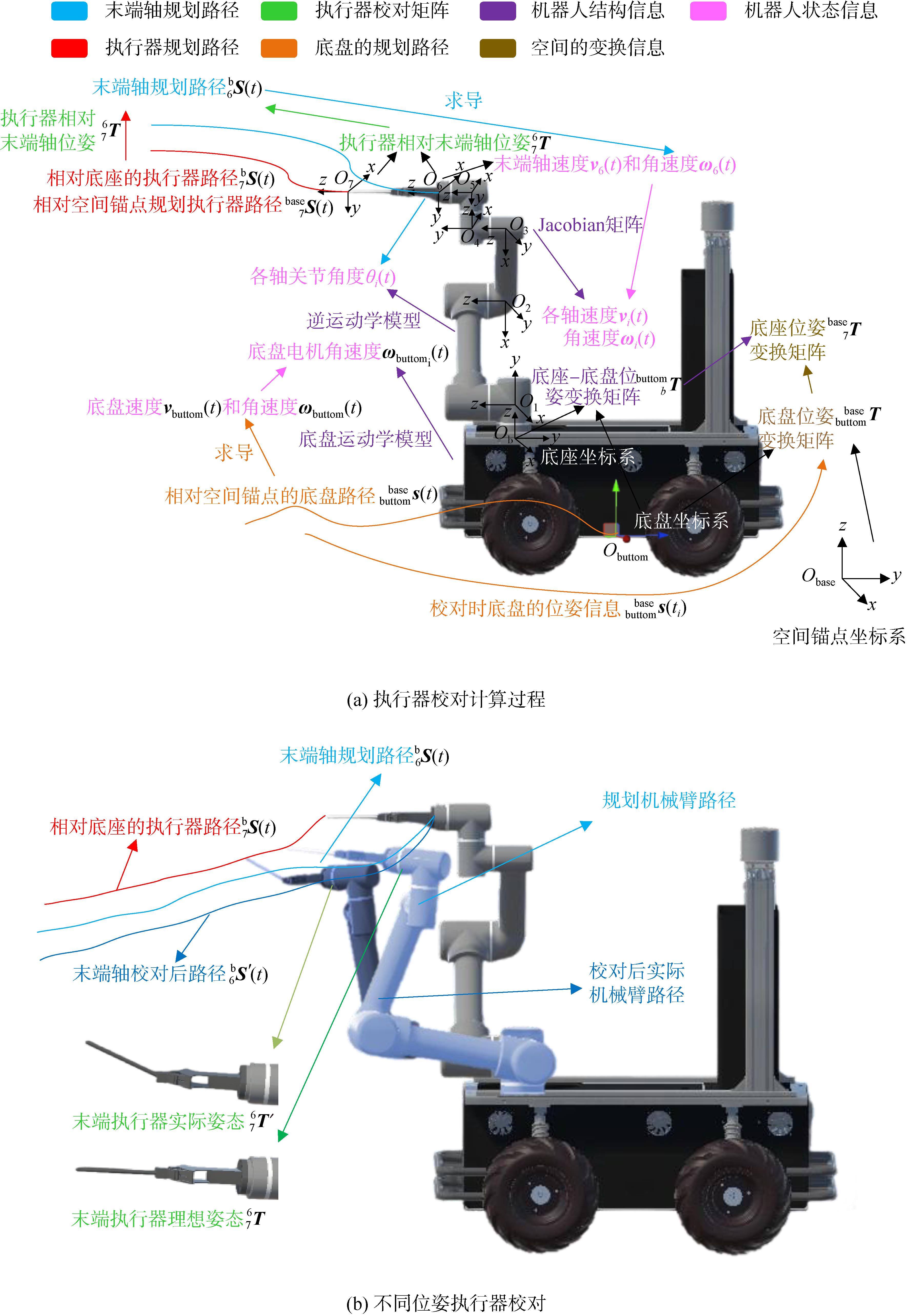
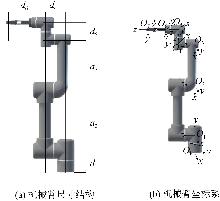
Fig. 5
Robotic arm structure
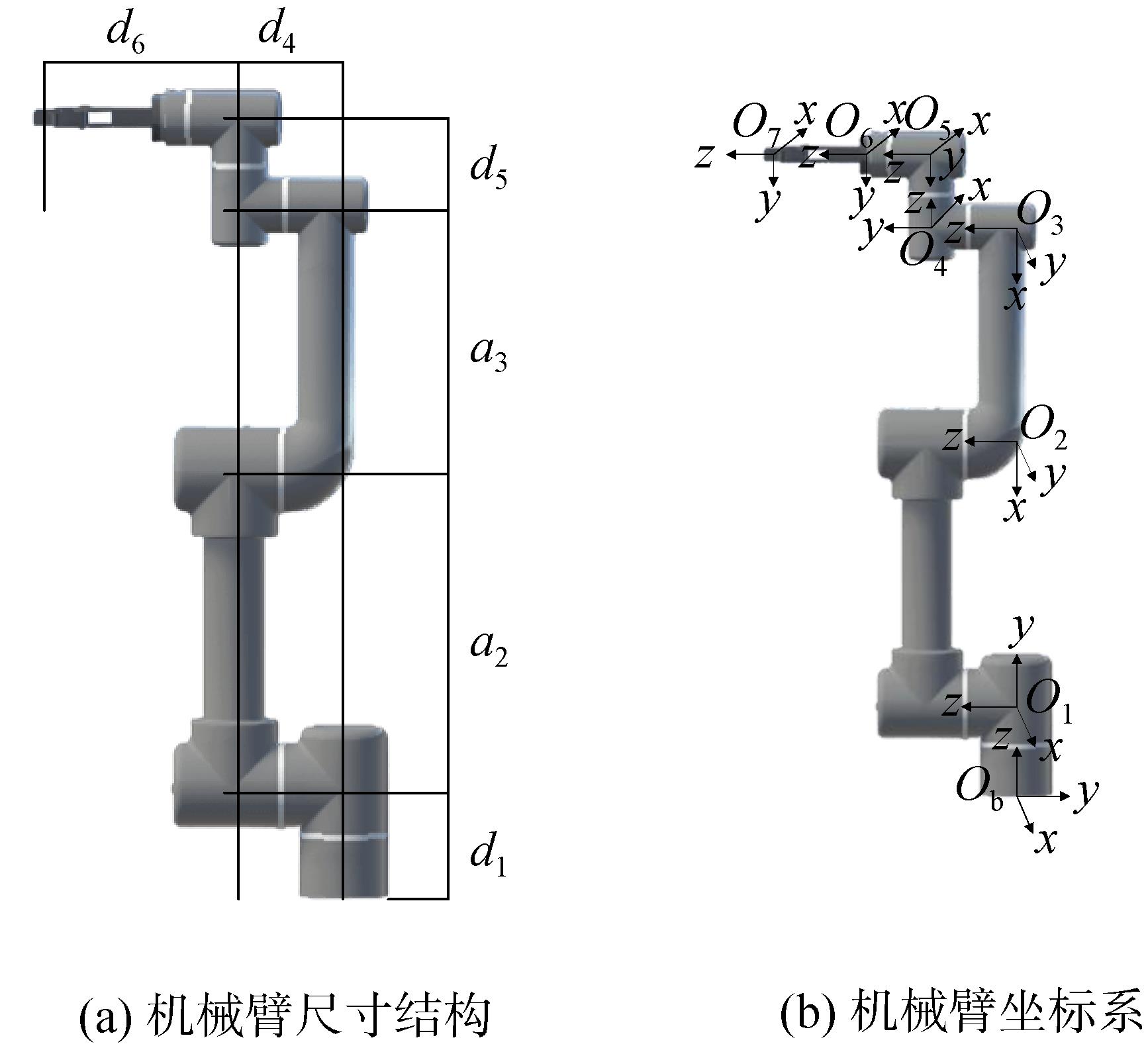
Table 1
D-H parameters
| 关节轴 | 连杆扭转角α/rad | 连杆长度a/m | 连杆偏距d/m | 关节转角θ/m |
|---|---|---|---|---|
| 关节1 | π/2 | 0 | d1 | θ1 |
| 关节2 | 0 | a2 | 0 | θ2 |
| 关节3 | 0 | a3 | 0 | θ3 |
| 关节4 | π/2 | 0 | d4 | θ4 |
| 关节5 | -π/2 | 0 | d5 | θ5 |
| 关节6 | 0 | 0 | d6 | θ6 |
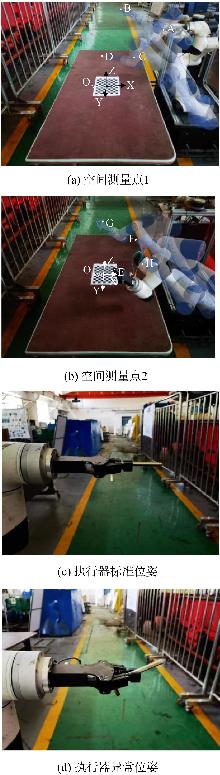
Fig. 6
Actuator pose
Table 2
Measurement results of control group I
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.859 | 127.066 | -88.892 | -127.165 |
| B | 1.038 | -35.107 | -74.522 | 10.927 |
| C | 0.984 | -176.575 | -39.089 | 175.736 |
| D | 0.882 | -108.787 | 85.577 | 36.385 |
| E | 1.005 | -32.998 | 28.935 | 156.788 |
| F | 0.998 | 103.439 | -50.584 | -143.583 |
| G | 0.998 | -49.219 | 29.768 | 120.126 |
| H | 0.888 | 175.980 | 0.360 | -176.807 |
Table 3
Measurement results of control group II
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.917 | 126.086 | -89.888 | -129.166 |
| B | 1.086 | -34.785 | -76.210 | 12.549 |
| C | 0.943 | -175.060 | -41.629 | 179.203 |
| D | 0.842 | -105.190 | 83.143 | 37.563 |
| E | 0.991 | -29.865 | 28.606 | 165.010 |
| F | 1.020 | 107.291 | -51.019 | -146.762 |
| G | 0.945 | -50.293 | 27.944 | 127.280 |
| H | 0.898 | 181.964 | -0.833 | -175.400 |
Table 4
Measurement results of experimental group
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.864 | 127.085 | -88.887 | -127.180 |
| B | 1.050 | -35.101 | -74.516 | 10.926 |
| C | 0.992 | -176.584 | -39.097 | 175.726 |
| D | 0.885 | -108.762 | 85.576 | 36.404 |
| E | 1.007 | -33.008 | 28.953 | 156.797 |
| F | 0.996 | 103.430 | -50.600 | -143.591 |
| G | 1.005 | -49.224 | 29.788 | 120.117 |
| H | 0.902 | 175.988 | 0.360 | -176.788 |
Table 5
Measurement results of standard group
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.850 | 127.079 | -88.882 | -127.172 |
| B | 1.050 | -35.101 | -74.516 | 10.931 |
| C | 0.981 | -176.592 | -39.083 | 175.739 |
| D | 0.891 | -108.769 | 85.576 | 36.392 |
| E | 1.010 | -32.999 | 28.944 | 156.797 |
| F | 1.007 | 103.437 | -50.588 | -143.587 |
| G | 0.996 | -49.226 | 29.781 | 120.109 |
| H | 0.892 | 175.990 | 0.358 | -176.804 |
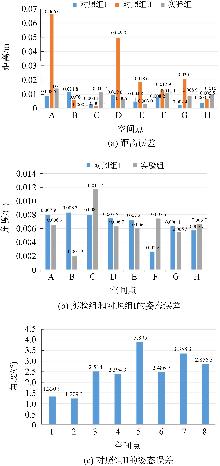
Fig. 7
Error analysis
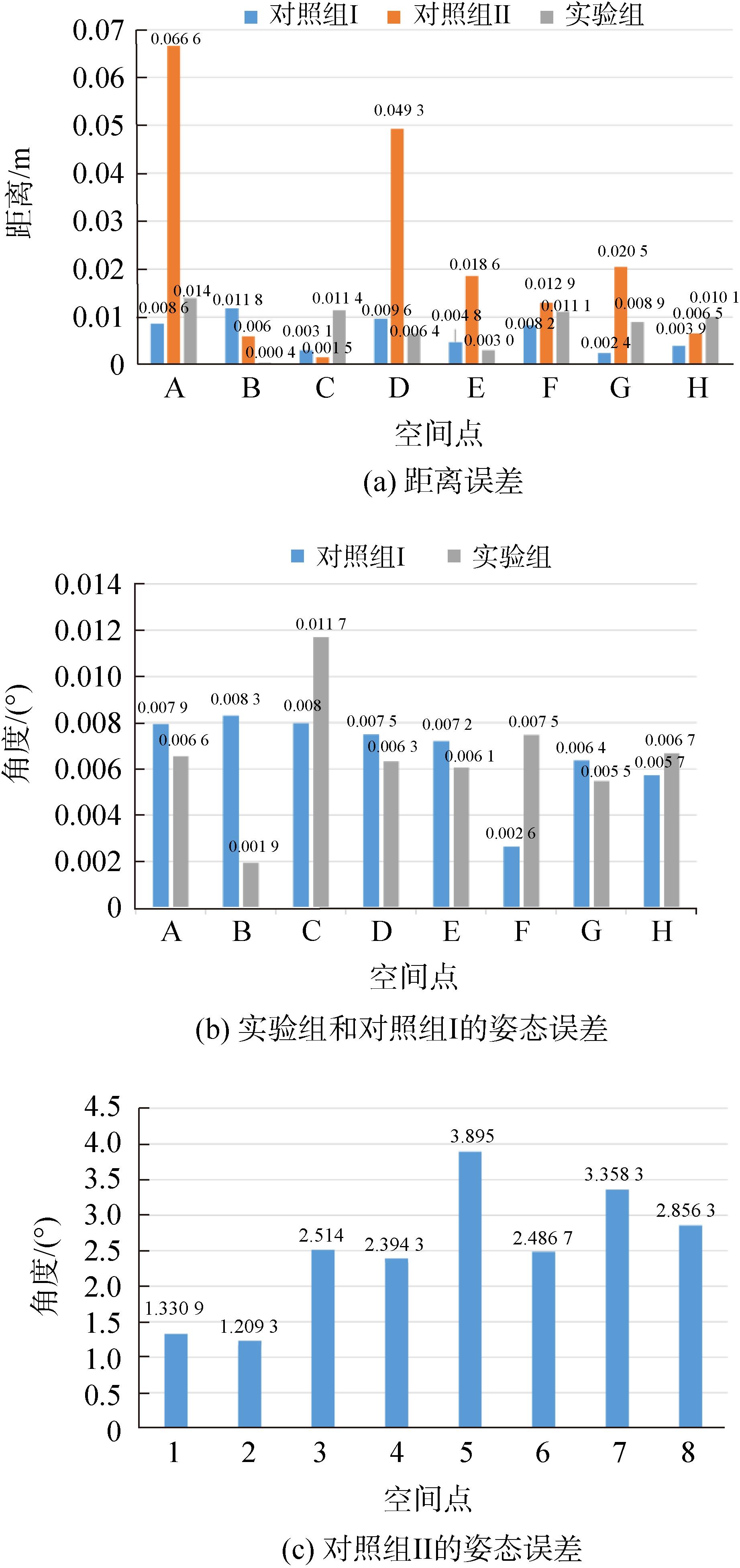
Table 6
Root mean square errors of each group
| 组别 | 距离均方根误差 | 姿态均方根误差 |
|---|---|---|
| 对照组I | 0.007 3 | 0.006 9 |
| 对照组II | 0.031 4 | 2.647 6 |
| 实验组 | 0.009 2 | 0.007 0 |
Table 7
p-values of Shapiro-Wilk test
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 对照组I | 0.644 4 | 0.865 6 |
| 对照组II | 0.806 5 | 0.634 9 |
| 实验组 | 0.580 5 | 0.213 7 |
Table 8
p-value of t-test
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 实验组与对照组I | 0.589 8 | 0.693 5 |
| 实验组与对照组II | 0.007 7 | 0.000 1 |
Table 9
Measurement results of control group
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.854 | 127.079 | -88.877 | -127.171 |
| B | 1.049 | -35.098 | -74.518 | 10.927 |
| C | 0.983 | -176.600 | -39.069 | 175.743 |
| D | 0.894 | -108.767 | 85.569 | 36.395 |
| E | 1.007 | -33.010 | 28.942 | 156.799 |
| F | 1.010 | 103.436 | -50.589 | -143.592 |
| G | 0.984 | -49.228 | 29.780 | 120.109 |
| H | 0.898 | 175.988 | 0.359 | -176.812 |
Table 10
Measurement results of experimental group
| 空间点 | 距离/m | 横滚角/(°) | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|---|---|
| A | 0.855 | 127.078 | -88.883 | -127.173 |
| B | 1.054 | -35.094 | -74.511 | 10.937 |
| C | 0.988 | -176.594 | -39.086 | 175.738 |
| D | 0.895 | -108.769 | 85.571 | 36.393 |
| E | 1.010 | -32.999 | 28.950 | 156.800 |
| F | 1.009 | 103.434 | -50.582 | -143.592 |
| G | 0.997 | -49.230 | 29.781 | 120.113 |
| H | 0.888 | 175.981 | 0.363 | -176.797 |
Table 11
Errors of control group
| 空间点 | 距离误差/m | 角度误差/(°) |
|---|---|---|
| A | 0.004 0 | 0.001 9 |
| B | -0.001 4 | 0.003 0 |
| C | 0.001 7 | 0.008 5 |
| D | 0.003 4 | 0.003 9 |
| E | -0.002 9 | 0.005 0 |
| F | 0.002 6 | 0.002 3 |
| G | -0.012 3 | 0.001 2 |
| H | 0.006 3 | 0.003 9 |
Table 12
Errors of experimental group
| 空间点 | 距离误差/m | 角度误差/(°) |
|---|---|---|
| A | 0.005 2 | 0.000 9 |
| B | 0.004 3 | 0.005 9 |
| C | 0.006 6 | 0.001 9 |
| D | 0.003 9 | 0.002 2 |
| E | -0.000 2 | 0.003 0 |
| F | 0.002 4 | 0.004 7 |
| G | 0.001 1 | 0.002 8 |
| H | -0.003 8 | 0.006 9 |
Table 13
Root mean square errors of each group
| 组别 | 距离均方根误差 | 姿态均方根误差 |
|---|---|---|
| 对照组 | 0.005 5 | 0.004 3 |
| 实验组 | 0.004 0 | 0.004 0 |
Table 14
p-value of Shapiro-Wilk test
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 对照组 | 0.121 3 | 0.257 1 |
| 实验组 | 0.763 3 | 0.542 6 |
Table 15
p-value of t-test
| 组别 | 距离误差 | 姿态误差 |
|---|---|---|
| 实验组与对照组 | 0.369 3 | 0.898 2 |
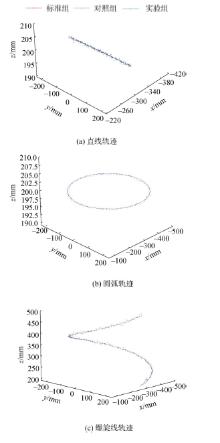
Fig. 8
Measurement results of path trajectories
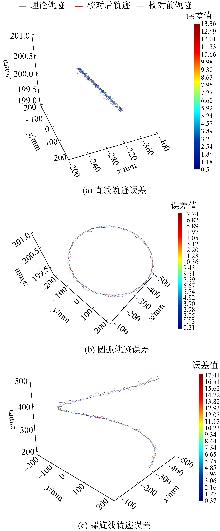
Fig. 9
Error heatmap
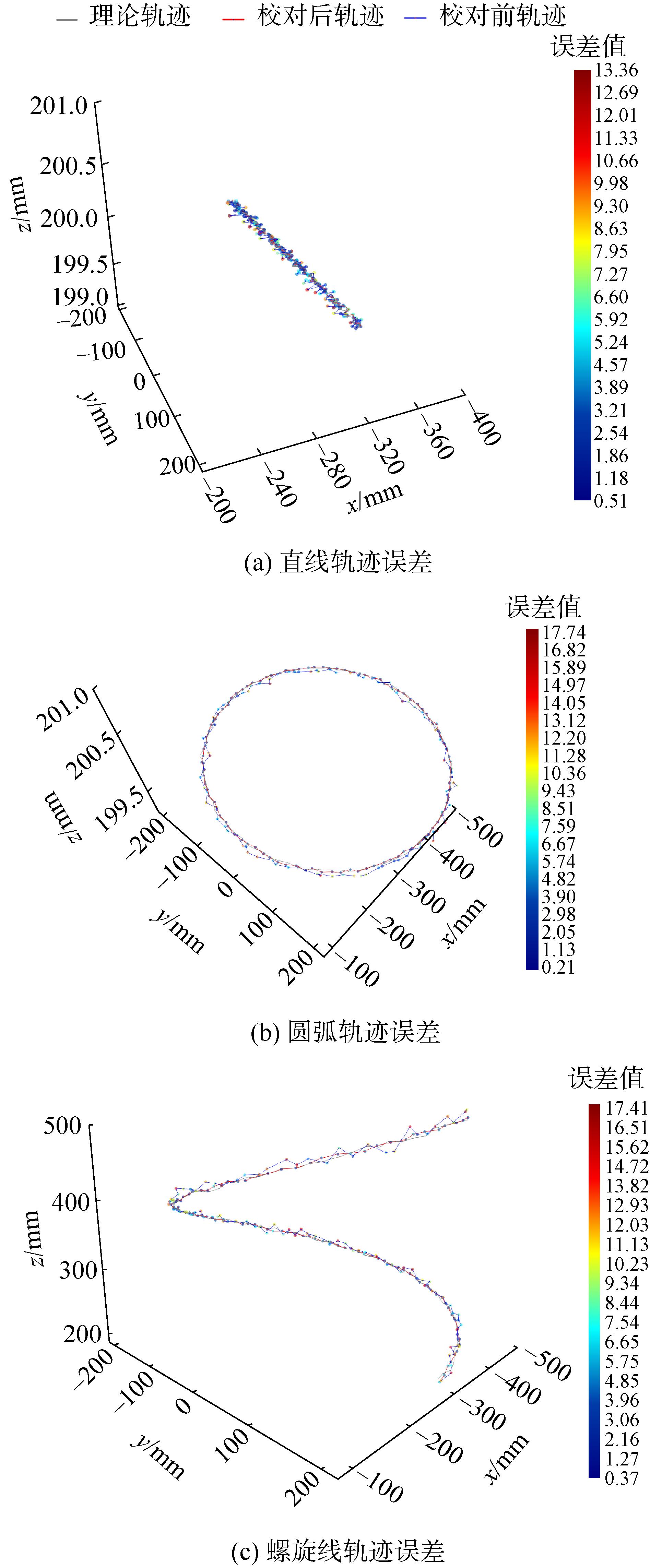
Table 16
Root mean square errors of each trajectory
| 指标 | 对照组 | 实验组 |
|---|---|---|
| 直线轨迹/mm | 6.072 6 | 2.204 1 |
| 圆弧轨迹/mm | 8.464 3 | 2.138 0 |
| 螺旋线轨迹/mm | 9.719 1 | 2.352 2 |
Table 17
Maximum position deviations of each trajectory
| 指标 | 对照组 | 实验组 |
|---|---|---|
| 直线轨迹/mm | 14.110 0 | 5.013 4 |
| 圆弧轨迹/mm | 16.336 4 | 4.614 4 |
| 螺旋线轨迹/mm | 16.434 5 | 4.473 9 |
Table 18
Time consumption for calibration by novice group
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 实验组 | 739 | 1 052 | 842 | 906 | 829 | 832 | 859 | 903 | 948 | 952 |
| 对照组Ⅰ | 2 013 | 2 071 | 2 956 | 2 307 | 2 553 | 2 224 | 2 281 | 2 374 | 2 283 | 2 731 |
| 对照组Ⅱ | 4 503 | 4 493 | 3 863 | 4 313 | 5 509 | 5 377 | 4 611 | 5 888 | 4 133 | 4 341 |
| 对照组Ⅲ | 3 514 | 3 363 | 3 342 | 2 759 | 3 438 | 3 598 | 2 970 | 3 358 | 3 597 | 3 720 |
Table 19
Time consumption for calibration by proficient group
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 实验组 | 398 | 586 | 561 | 541 | 483 | 503 | 567 | 494 | 463 | 467 |
| 对照组Ⅰ | 1 770 | 1 592 | 1 840 | 1 451 | 2 048 | 1 654 | 2 137 | 1 717 | 1 899 | 2 136 |
| 对照组Ⅱ | 4 619 | 3 350 | 3 350 | 3 381 | 2 854 | 3 156 | 3 201 | 3 576 | 3 841 | 3 146 |
| 对照组Ⅲ | 2 270 | 2 989 | 2 181 | 2 314 | 2 851 | 2 943 | 2 350 | 1 836 | 2 569 | 2 397 |
Table 20
Time consumption for calibration by expert group
| 组别 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 实验组 | 443 | 423 | 405 | 432 | 425 | 442 | 497 | 475 | 365 | 372 |
| 对照组Ⅰ | 2 009 | 1 295 | 1 492 | 1 246 | 1 699 | 1 474 | 1 459 | 1 372 | 1 694 | 1 825 |
| 对照组Ⅱ | 2 939 | 2 987 | 3 124 | 2 996 | 3 074 | 3 525 | 3 574 | 3 157 | 2 905 | 2 958 |
| 对照组Ⅲ | 2 046 | 2 032 | 2 498 | 2 344 | 1 796 | 2 521 | 2 105 | 2 105 | 2 457 | 2 042 |
Table 21
Average time consumption
| 组别 | 新手组 | 熟练组 | 专家组 |
|---|---|---|---|
| 实验组 | 886.2 | 506.3 | 427.9 |
| 对照组Ⅰ | 2 379.3 | 1 824.4 | 1 556.5 |
| 对照组Ⅱ | 4 703.1 | 3 447.4 | 3 123.9 |
| 对照组Ⅲ | 3 365.9 | 2 470.0 | 2 194.6 |
Table 22
Standard deviation
| 组别 | 新手组 | 熟练组 | 专家组 |
|---|---|---|---|
| 实验组 | 86.21 | 57.82 | 40.93 |
| 对照组Ⅰ | 291.35 | 232.76 | 243.90 |
| 对照组Ⅱ | 659.49 | 489.45 | 238.46 |
| 对照组Ⅲ | 295.43 | 367.82 | 244.16 |
| [1] | 工业和信息化部, 国家发展改革委, 财政部, 等. 关于印发推动工业领域设备更新实施方案的通知: 工信部联规〔2024〕53号[EB/OL]. (2024-03-27) [2025-05-30]. . |
| [2] | 王巍, 徐磊, 牛孝霞, 等. 摄影测量系统在自动制孔机器人末端执行器位姿调整中的应用[J]. 机械工程师, 2025(4): 1-5, 12. |
| Wang Wei, Xu Lei, Niu Xiaoxia, et al. Application of Industrial Photogrammetric System in Position and Pose Measurement of Automatic Hole Making Robotprocess End Effector[J]. Mechanical Engineer, 2025(4): 1-5, 12. | |
| [3] | Li Zhibin, Li Shuai, Francis A, et al. A Novel Calibration System for Robot Arm via an Open Dataset and a Learning Perspective[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(12): 5169-5173. |
| [4] | 高文斌, 褚亚杰, 余晓流. 一种基于工具坐标系的机器人运动学参数标定方法[J]. 中国机械工程, 2022, 33(18): 2183-2189. |
| Gao Wenbin, Chu Yajie, Yu Xiaoliu. A Kinematic-parameter Calibration Method of Robots Based on Tool Coordinate[J]. China Mechanical Engineering, 2022, 33(18): 2183-2189. | |
| [5] | 梁亮, 吴成东, 刘世昌. 基于关节几何误差的机器人绝对位置精度标定算法[J]. 东北大学学报(自然科学版), 2025, 46(4): 1-7. |
| Liang Liang, Wu Chengdong, Liu Shichang. Absolute Position Accuracy Calibration Algorithm for Robots Based on Joint Geometric Error[J]. Journal of Northeastern University(Natural Science), 2025, 46(4): 1-7. | |
| [6] | Li Xirui, Zhang Enzheng, Fang Xiujun, et al. Calibration Method for Industrial Robots Based on the Principle of Perigon Error Close[J]. IEEE Access, 2022, 10: 48569-48576. |
| [7] | 王东霞, 唐颖, 李国成, 等. 机器人几何参数标定误差模型对定位精度影响研究[J]. 计量学报, 2024, 45(8): 1108-1114. |
| Wang Dongxia, Tang Ying, Li Guocheng, et al. Research on the Influence of Robot Geometric Parameter Calibration Error Model on Positioning Accuracy[J]. Acta Metrologica Sinica, 2024, 45(8): 1108-1114. | |
| [8] | Li Zhibin, Li Shuai, Luo Xin. An Overview of Calibration Technology of Industrial Robots[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(1): 23-36. |
| [9] | Wu Wei, Liu Chang, Cao Wenhan, et al. Multi-sensor Calibration System for Mobile Robots[C]//2023 7th CAA International Conference on Vehicular Control and Intelligence (CVCI). Piscataway: IEEE, 2023: 1-7. |
| [10] | Mao Jincheng, Xu Ruidi, Ma Xiaojie, et al. Fast Calibration Method for Base Coordinates of the Dual-robot Based on Three-point Measurement Calibration Method[J]. Applied Sciences, 2023, 13(15): 8799. |
| [11] | Wang Ziyi, Liu Yang, Wang Xinyue, et al. Field Calibration Method for Industrial Robots Based on Single Position Sensitive Device[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-12. |
| [12] | Nguyen Hoai-Nhan, Le Phu-Nguyen, Kang Hee-Jun. A Performance Comparison of the Full Pose-based and Partial Pose-based Robot Calibration for Various Types of Robot Manipulators[J]. Advances in Mechanical Engineering, 2021, 2021(9): 168781402110477. |
| [13] | 于振, 万俊贺, 刘海林, 等. 基于IGCF算法和CSF-PPSO-ESN算法的工业机器人末端执行器位姿重复性检测[J]. 仪器仪表学报, 2023, 44(6): 43-53. |
| Yu Zhen, Wan Junhe, Liu Hailin, et al. Industrial Robot End Effector Pose Repeatability Test Based on IGCF and CSF-PPSO-ESN Algorithm[J]. Chinese Journal of Scientific Instrument, 2023, 44(6): 43-53. | |
| [14] | 王逸峰, 逯永康, 李俊卿, 等. 基于摄影测量的移动机器人末端标定方法研究[J]. 航空制造技术, 2022, 65(18): 92-97. |
| Wang Yifeng, Lu Yongkang, Li Junqing, et al. Research on End Calibration Method of Mobile Robot Based on Photogrammetry[J]. Aeronautical Manufacturing Technology, 2022, 65(18): 92-97. | |
| [15] | 高文斌, 杜涛, 罗瑞卿. 一种利用位置误差模型的机器人位姿标定方法[J]. 机械科学与技术, 2023, 42(11): 1852-1859. |
| Gao Wenbin, Du Tao, Luo Ruiqing. A Robot Pose Calibration Method Using Position Error Model[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(11): 1852-1859. | |
| [16] | 高国琴, 韩滢. 改进PROSAC算法的并联机器人末端位姿检测方法[J]. 计算机应用与软件, 2022, 39(4): 205-212, 262. |
| Gao Guoqin, Han Ying. Pose Detection for Parallel Robot Based on Improved PROSAC Algorithm[J]. Computer Applications and Software, 2022, 39(4): 205-212, 262. | |
| [17] | Zhang Qi, Tian Wei, Hu Junshan, et al. Robot Hand-eye Calibration Method Based on Intermediate Measurement System[C]//Intelligent Robotics and Applications. Cham: Springer International Publishing, 2021: 37-47. |
| [18] | Kuo Yong-Lin, Hsieh Chia-Hang. Static Calibration and Dynamic Compensation of the SCORBOT Robot Using Sensor Fusion and LSTM Networks[J]. Journal of the Chinese Institute of Engineers, 2023, 46(8): 881-894. |
| [19] | 李明, 徐群, 王艳, 等. 基于自适应动态规划机械臂运动策略仿真研究[J]. 系统仿真学报, 2023, 35(10): 2182-2192. |
| Li Ming, Xu Qun, Wang Yan, et al. Simulation and Research of Manipulator Motion Strategy Based on Adaptive Dynamic Programming[J]. Journal of System Simulation, 2023, 35(10): 2182-2192. | |
| [20] | 尤波, 王明睿, 李智, 等. 基于模型预测控制的轮式移动机器人轨迹规划[J]. 系统仿真学报, 2020, 32(4): 591-600. |
| You Bo, Wang Mingrui, Li Zhi, et al. Trajectory Planning of Wheeled Mobile Robot Based on Model Predictive Control[J]. Journal of System Simulation, 2020, 32(4): 591-600. | |
| [21] | 李敏, 张森, 曾祥光, 等. 基于深度强化学习的四足机器人单腿越障轨迹规划[J]. 系统仿真学报, 2025, 37(4): 895-909. |
| Li Min, Zhang Sen, Zeng Xiangguang, et al. Trajectory Planning of Quadruped Robot over Obstacle with Single Leg Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2025, 37(4): 895-909. | |
| [22] | 张茜, 王平. 激光传感自适应的装配式建筑机器人轨迹规划[J]. 光学技术, 2024, 50(5): 598-605. |
| Zhang Qian, Wang Ping. Trajectory Planning of Prefabricated Building Robot Based on Laser Sensing Adaptive Method[J]. Optical Technique, 2024, 50(5): 598-605. | |
| [23] | 彭海兵, 赵亚东. 考虑能耗的煤矿井下水仓清挖机器人轨迹规划方法[J]. 工矿自动化, 2022, 48(增2): 130-134. |
| Peng Haibing, Zhao Yadong. Trajectory Planning Method of Underground Mine Sump Cleaning Robot Considering Energy Consumption[J]. Journal of Mine Automation, 2022, 48(S2): 130-134. | |
| [24] | 姚江云, 王宽田. 基于膜计算的搬运机器人轨迹规划和模型预测控制[J]. 现代制造工程, 2024(10): 82-89. |
| Yao Jiangyun, Wang Kuantian. Trajectory Planning of Handling Robots Based on Membrane Computing and Model Prediction Control[J]. Modern Manufacturing Engineering, 2024(10): 82-89. | |
| [25] | 王学文, 刘曙光, 王雪松, 等. 面向多人-多机复杂协作任务的煤矿XR智能运维系统[J]. 煤炭学报, 2024, 49(4): 2124-2140. |
| Wang Xuewen, Liu Shuguang, Wang Xuesong, et al. Research on Coal Mine XR Intelligent Operation and Maintenance System for Complex Collaborative Tasks Involving Multiple Humans and Multiple Robots[J]. Journal of China Coal Society, 2024, 49(4): 2124-2140. | |
| [26] | 陈赛旋. 协作机器人零力控制与碰撞检测技术研究[D]. 合肥: 中国科学技术大学, 2018. |
| Chen Saixuan. Research on the Technology of Zero Moment Control and Collision Detection of Collaborative Robot[D]. Hefei: University of Science and Technology of China, 2018. | |
| [27] | 周扬. 基于UR5机械臂在线受力误差补偿系统的研究与实现[D]. 沈阳: 沈阳工业大学, 2024. |
| Zhou Yang. Research and Implementation of an Online Force Error Compensation System Based on UR5 Robotic Arm[D]. Shenyang: Shenyang University of Technology, 2024. |
| [1] | Zhang Dingkun, Liang Haizhao. Hierarchical Motion Planning of Mobile Robot Based on Dynamic Corridor Inflation and Convex Optimization [J]. Journal of System Simulation, 2026, 38(5): 1383-1407. |
| [2] | Nan Yandong, Zhu Jinda, Lu Xinbin, Qin Zhiying, Qi Dandan, Ding Zhiheng. State Monitoring of Nuclear Power Connection Sleeve Quality Inspection Equipment Driven by Digital Twin [J]. Journal of System Simulation, 2026, 38(4): 1004-1017. |
| [3] | Yan Dong, Yang Hanzhe, Jiang Fangfang, Liu Chengbao, Zhang Peng. Design and Application of Collaborative Simulation System for Satellite Constellation Flight Missions [J]. Journal of System Simulation, 2026, 38(4): 1067-1079. |
| [4] | Wang Xueqian, Men Jianbing, Zhou Xin, Wang Shuyou, Li Mei. A Precise Damage Assessment Method for Lethal Blast Warheads Against Quadruped Robots [J]. Journal of System Simulation, 2026, 38(3): 702-713. |
| [5] | Wang Ziying, Sun Congjun, Li Guihu, Zhang Tianhao. Virtual Train Operation Platform Based on Digital Twin [J]. Journal of System Simulation, 2026, 38(3): 736-745. |
| [6] | Zhang Ziyao, Ji Yunfeng. Simulation of Robotic Arm Ball-catching Strategy Based on Curriculum RL of Transformer [J]. Journal of System Simulation, 2026, 38(2): 321-331. |
| [7] | Zhou Jiarui, Cui Haihua, Li Pengcheng, Gu Shihao, Hao Huipu, Zhao Xifu, Zhao Anan, Jiang Tao. 3D Object Tracking Registration Based on Improved RBOT Method [J]. Journal of System Simulation, 2026, 38(1): 14-28. |
| [8] | Lu Houjun, Zhu Yifei, Rong Yanping, Zhang Wanghui. Digital Twin Modeling Method for Bulk Cargo Stacks Based on 2D LiDAR [J]. Journal of System Simulation, 2025, 37(9): 2269-2286. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [12] | Chen Tao, Liu Jianxuan, Wang Lizhong, Zou Xiangjun, Li Xiaojuan. Research on Non-singular Fast Integral Terminal Sliding Mode Trajectory Tracking Control of Six-axis Robotic Arm [J]. Journal of System Simulation, 2025, 37(8): 2115-2123. |
| [13] | Liu Yongkui, Yang Kang, Tuo Benben, Pan Yaduo, Wang Xinyu, Wang Yihan, Gong Yongqian, Zhang Lin, Wang Lihui, Lin Tingyu, Zi Bin, Li Yuan, You Wei, Xu Xun. Digital Twinned Industrial Robot: Conceptual Framework, Key Technologies, and Case Study [J]. Journal of System Simulation, 2025, 37(7): 1723-1752. |
| [14] | Liu Tao, Li Hanxi, Yin Yong, Liu Jialun. Research Review of Intelligent Navigation Simulation Technology and Its Applications [J]. Journal of System Simulation, 2025, 37(7): 1684-1709. |
| [15] | Chen Qinghua, Liang Zuoyou, Guan Weijuan, Ji Jiadong, Liu Ping. Construction Method of Digital Twin System for High-low Temperature Test Chamber [J]. Journal of System Simulation, 2025, 37(6): 1400-1411. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
