

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (5): 1383-1407.doi: 10.16182/j.issn1004731x.joss.25-0395
Previous Articles Next Articles
Zhang Dingkun1,2, Liang Haizhao1,2
Received:2025-05-08
Revised:2025-07-25
Online:2026-05-21
Published:2026-05-29
Contact:
Liang Haizhao
CLC Number:
Zhang Dingkun, Liang Haizhao. Hierarchical Motion Planning of Mobile Robot Based on Dynamic Corridor Inflation and Convex Optimization[J]. Journal of System Simulation, 2026, 38(5): 1383-1407.

Fig. 1
Hierarchical motion planning framework
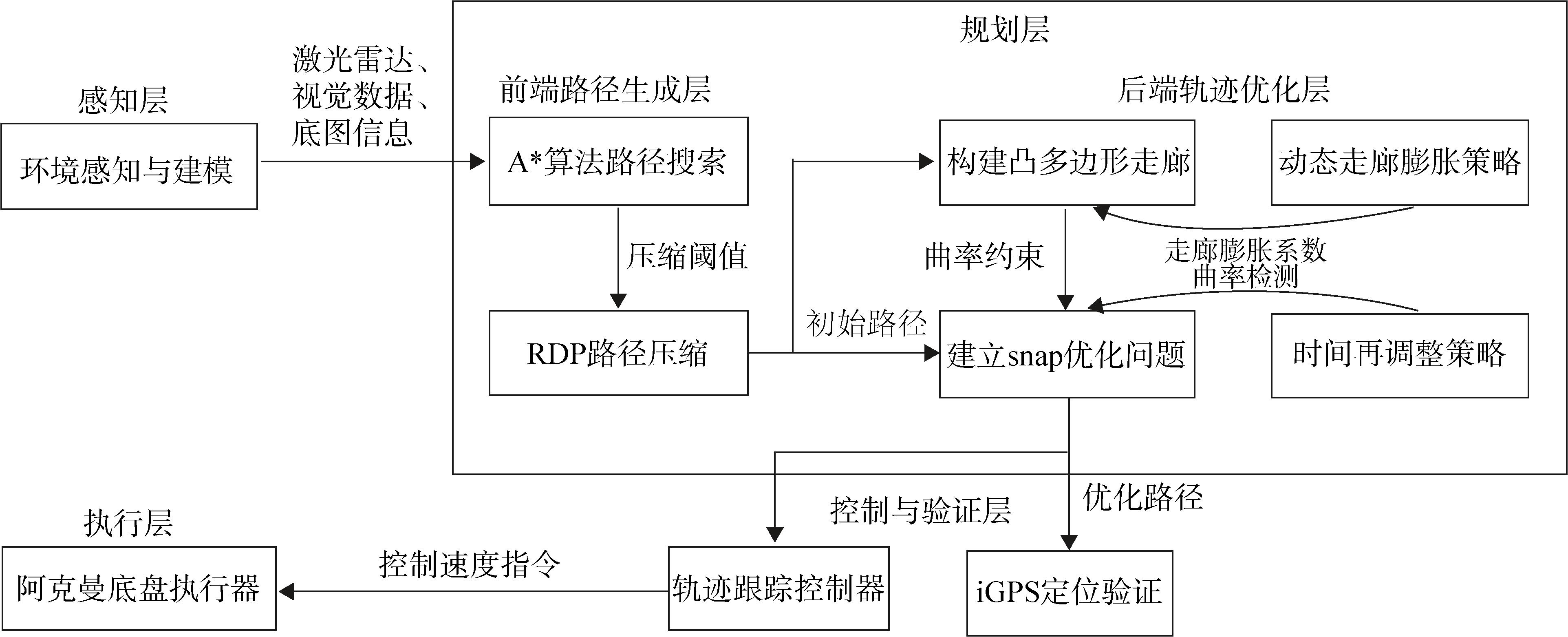
Fig. 2
Polygon initialization
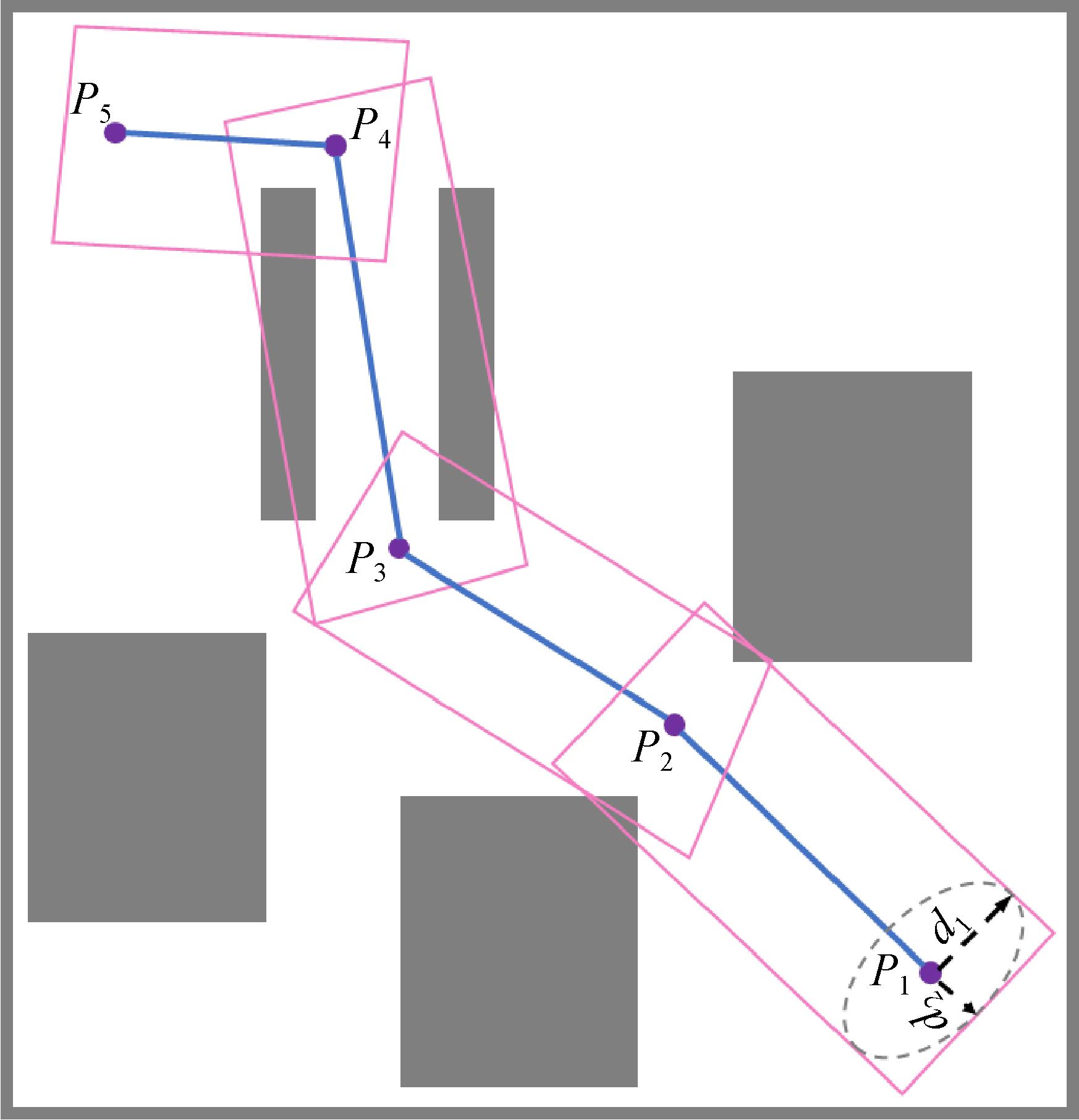
Fig. 3
KD tree-based obstacle query
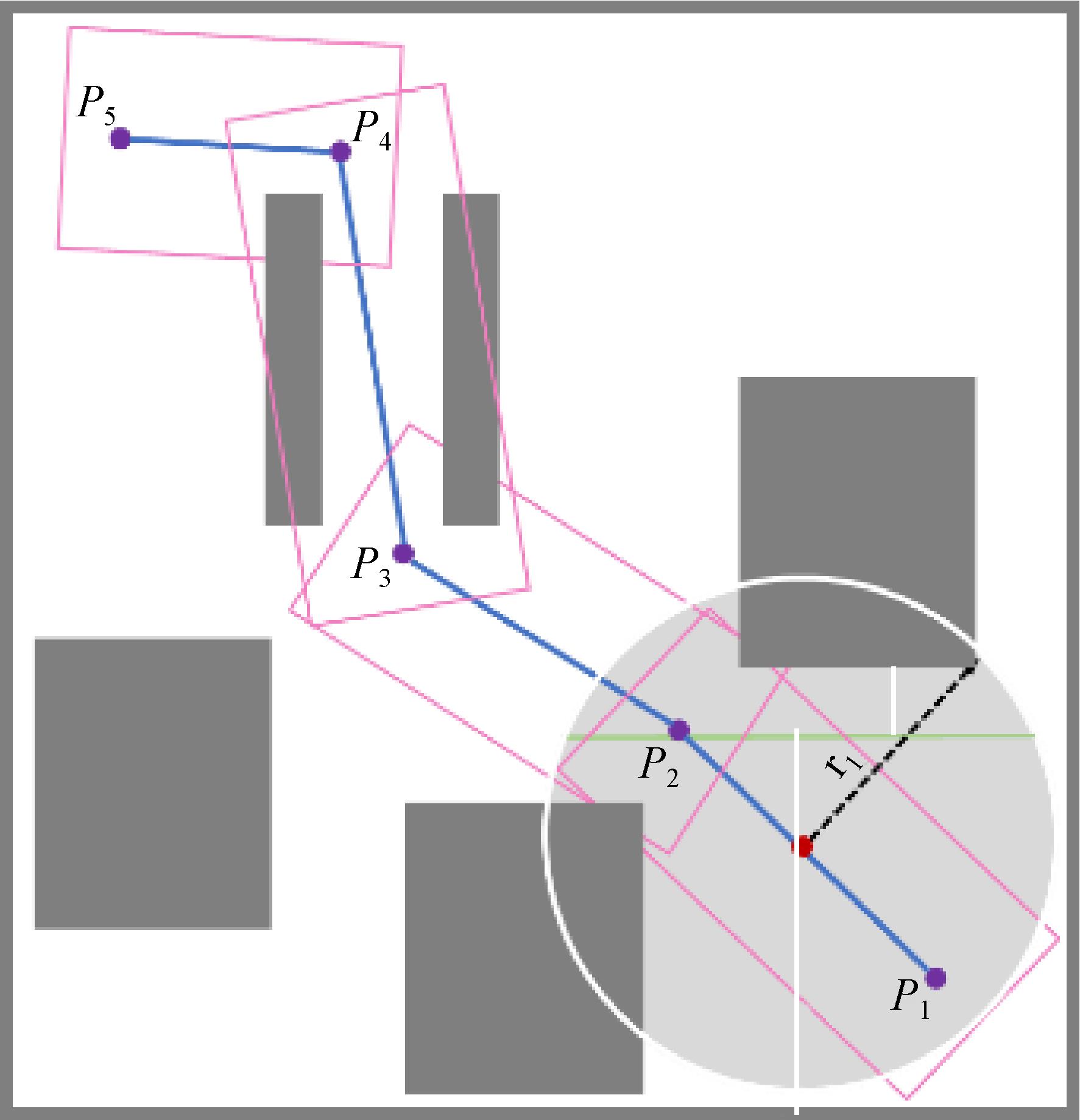
Fig. 4
Ellipse construction process
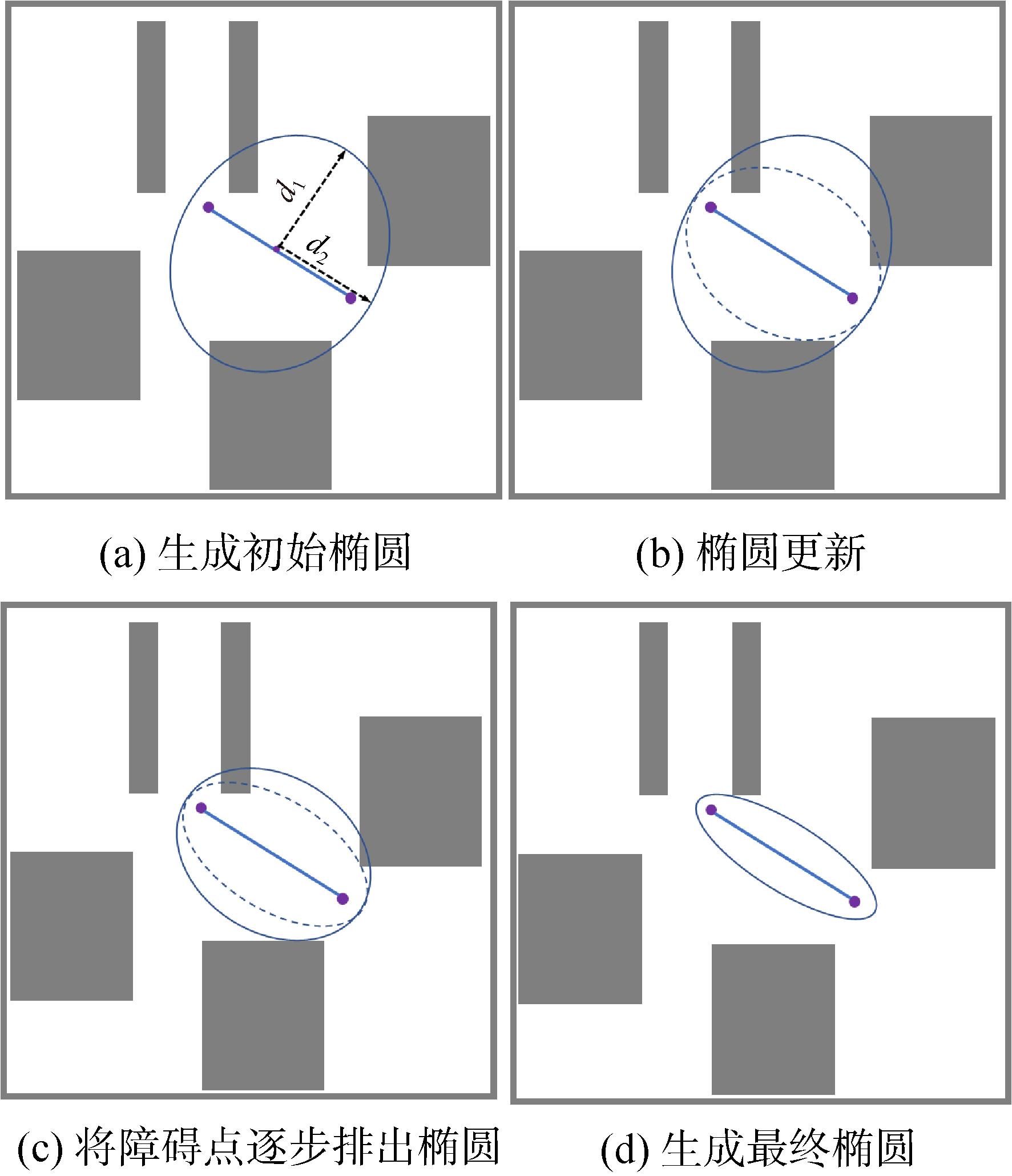
Fig. 5
Final polygon construction process
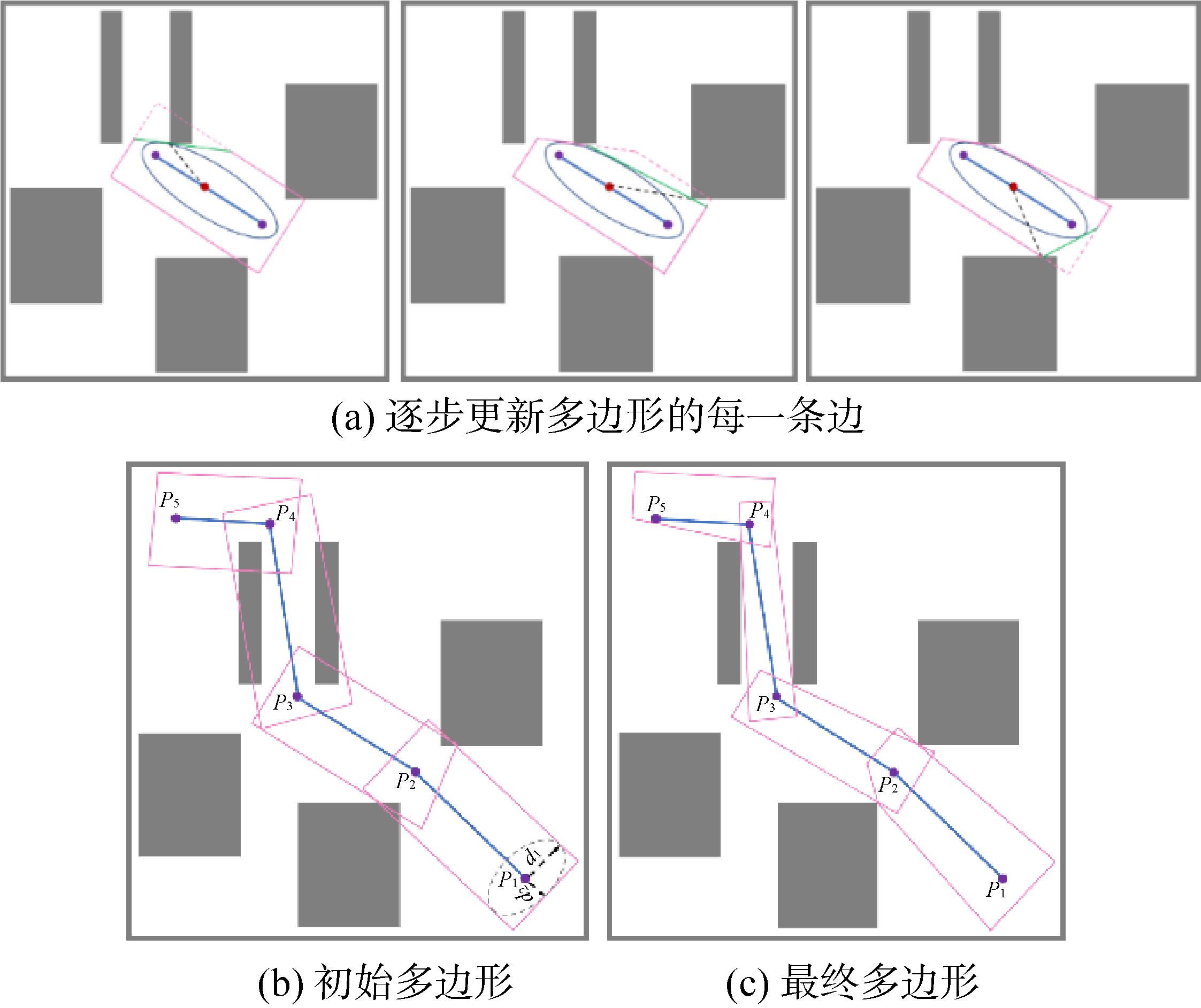
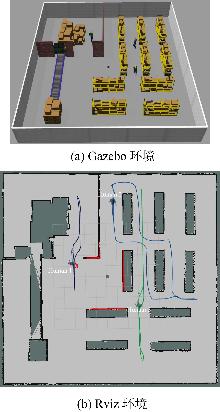
Fig. 6
Simulation Environment Demonstration
Fig. 7
Comparison of A* path before and after pruning

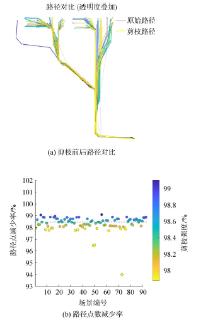
Fig. 8
Pruning effect demonstration
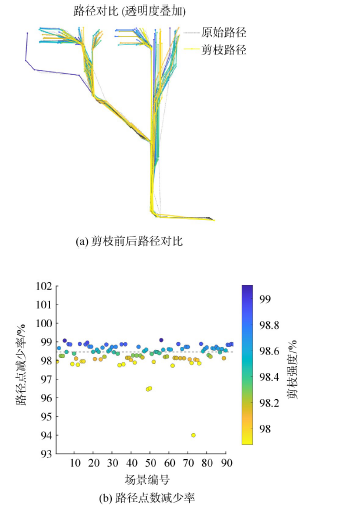
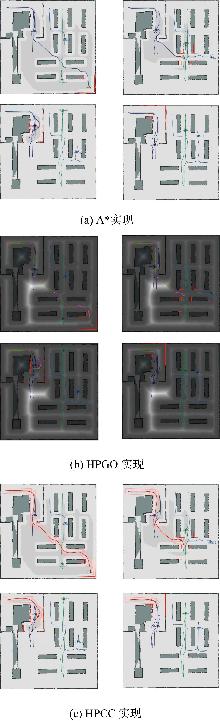
Fig. 9
Rviz visualization snapshot
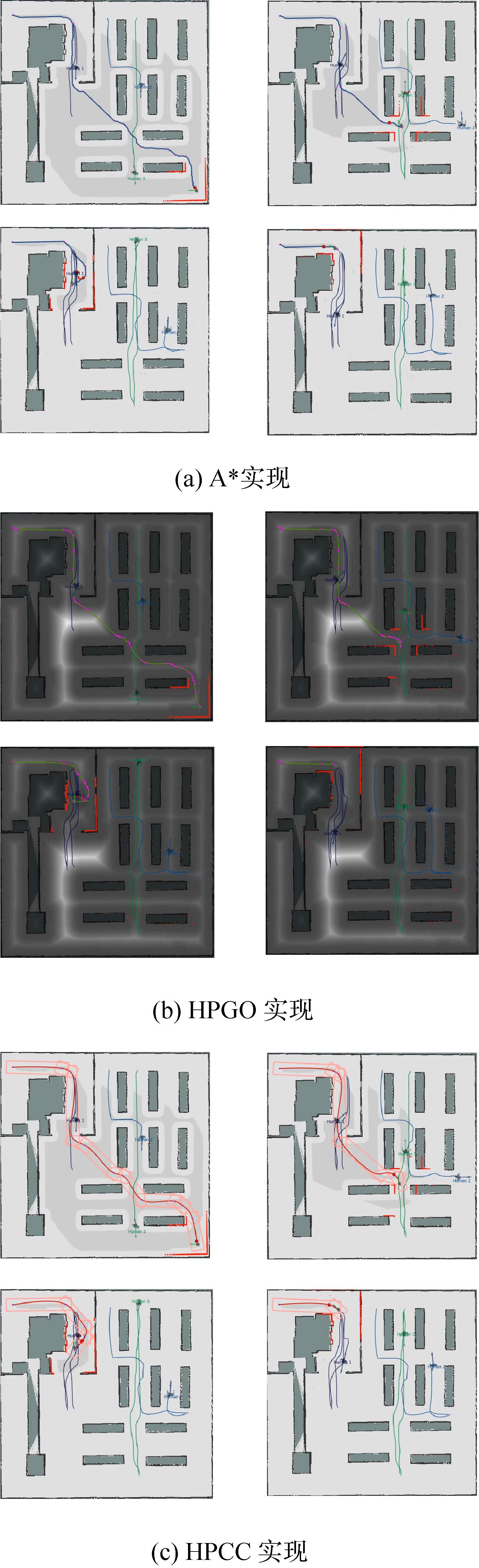
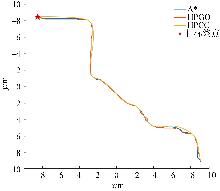
Fig. 10
Trajectory comparison plot
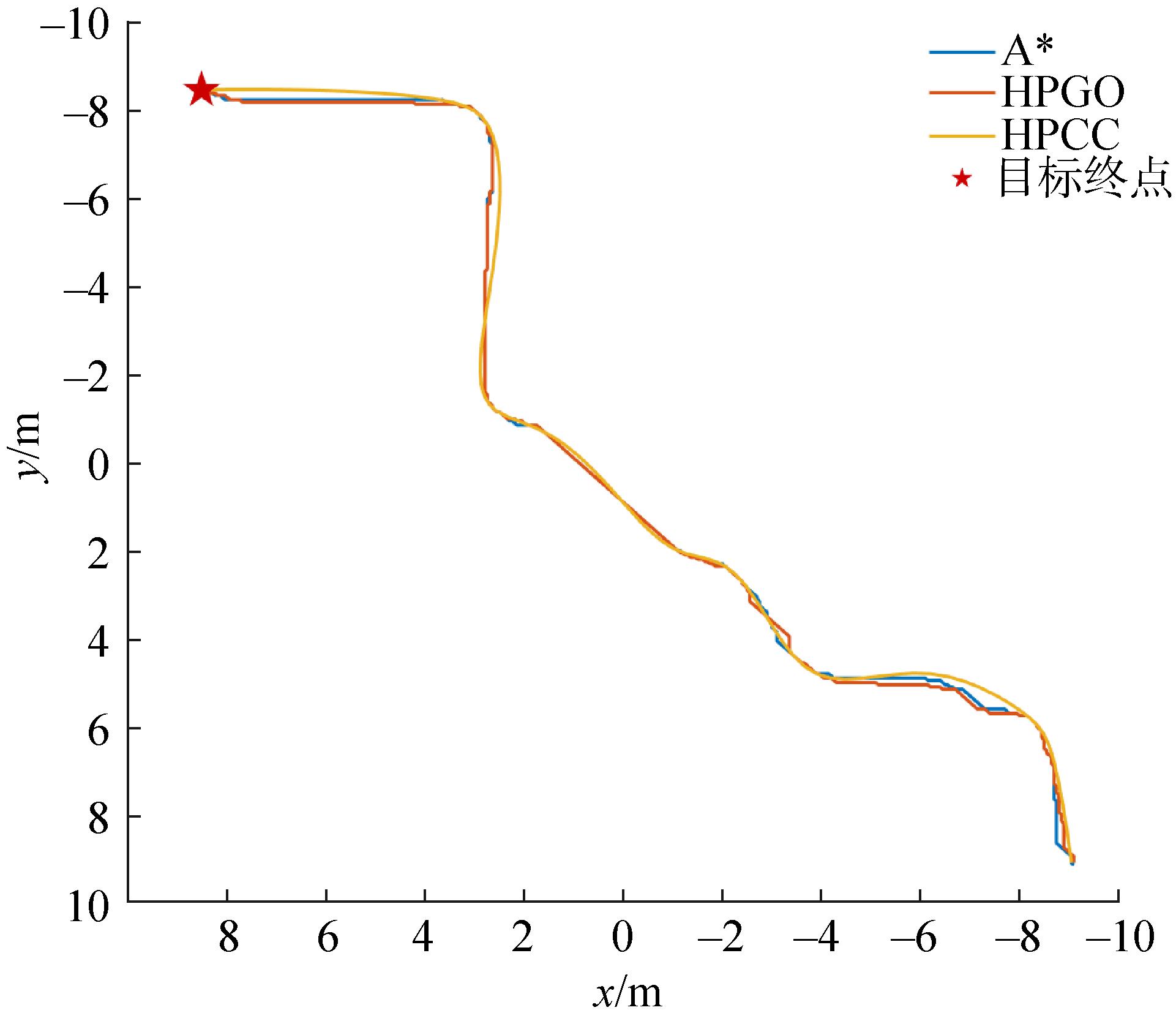
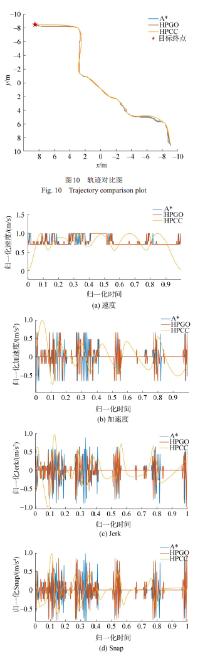
Fig. 11
Kinematic parameter variation curves
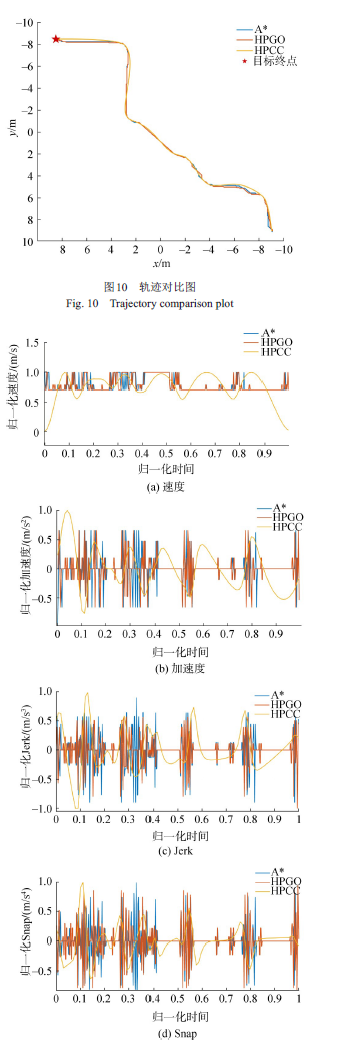
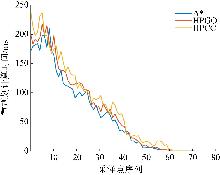
Fig. 12
Replanning computation time variation curves
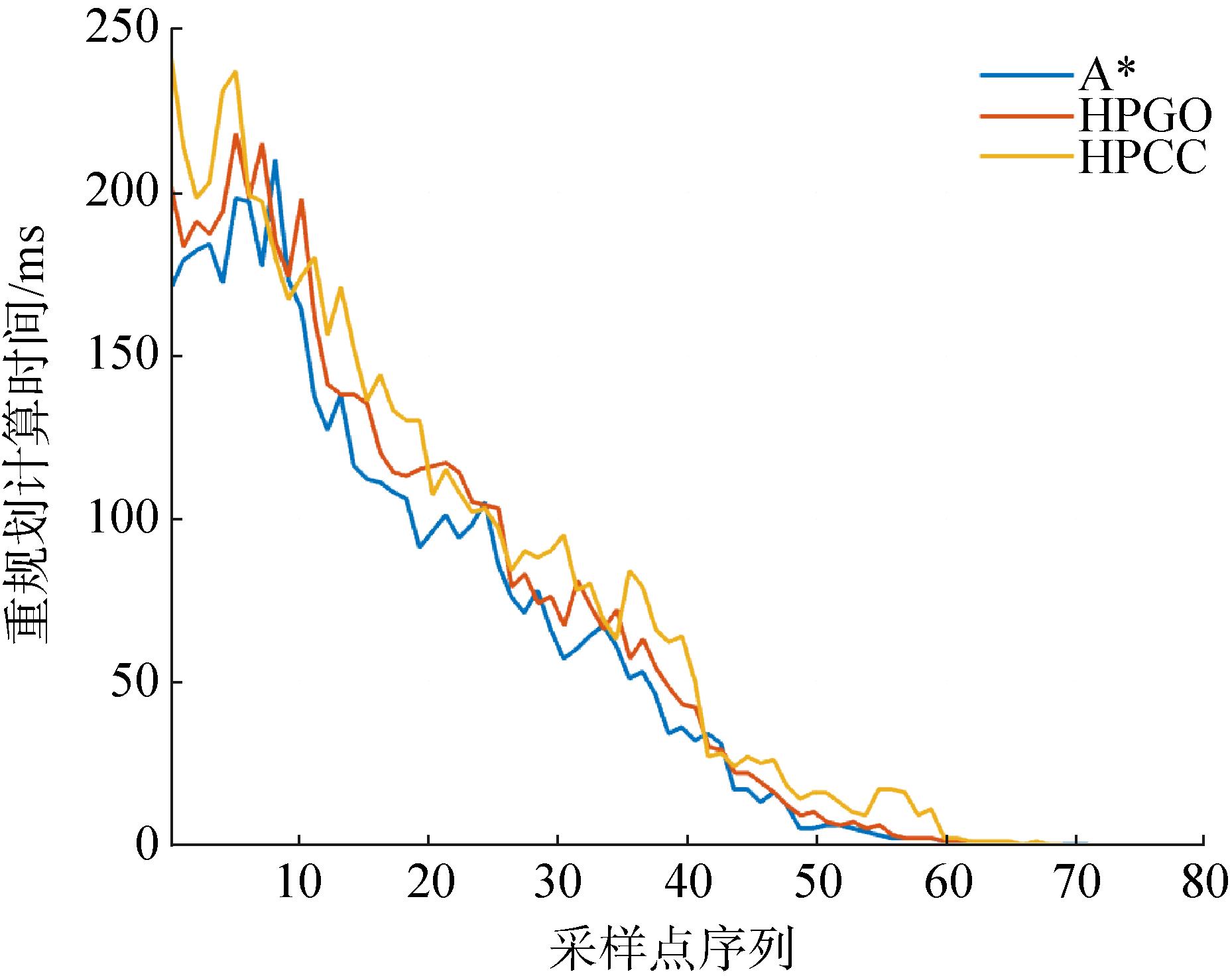
Table 1
Algorithm performance quantitative comparison
| 量化指标 | HPCC | HPGO | A* |
|---|---|---|---|
| 曲线连续性误差 | 70.32 | 837.65 | 1 082.84 |
| 轨迹长度/m | 29.74 | 30.59 | 30.64 |
| 重规划计算时间/ms | 93.11 | 80.79 | 65.77 |
| 路径点数量 | 100 | 543 | 544 |
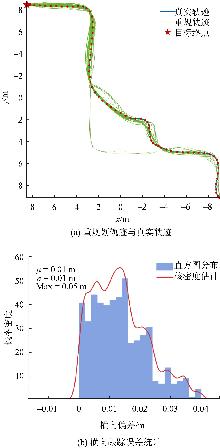
Fig. 13
Experimental data plot for planner-controller compatibility
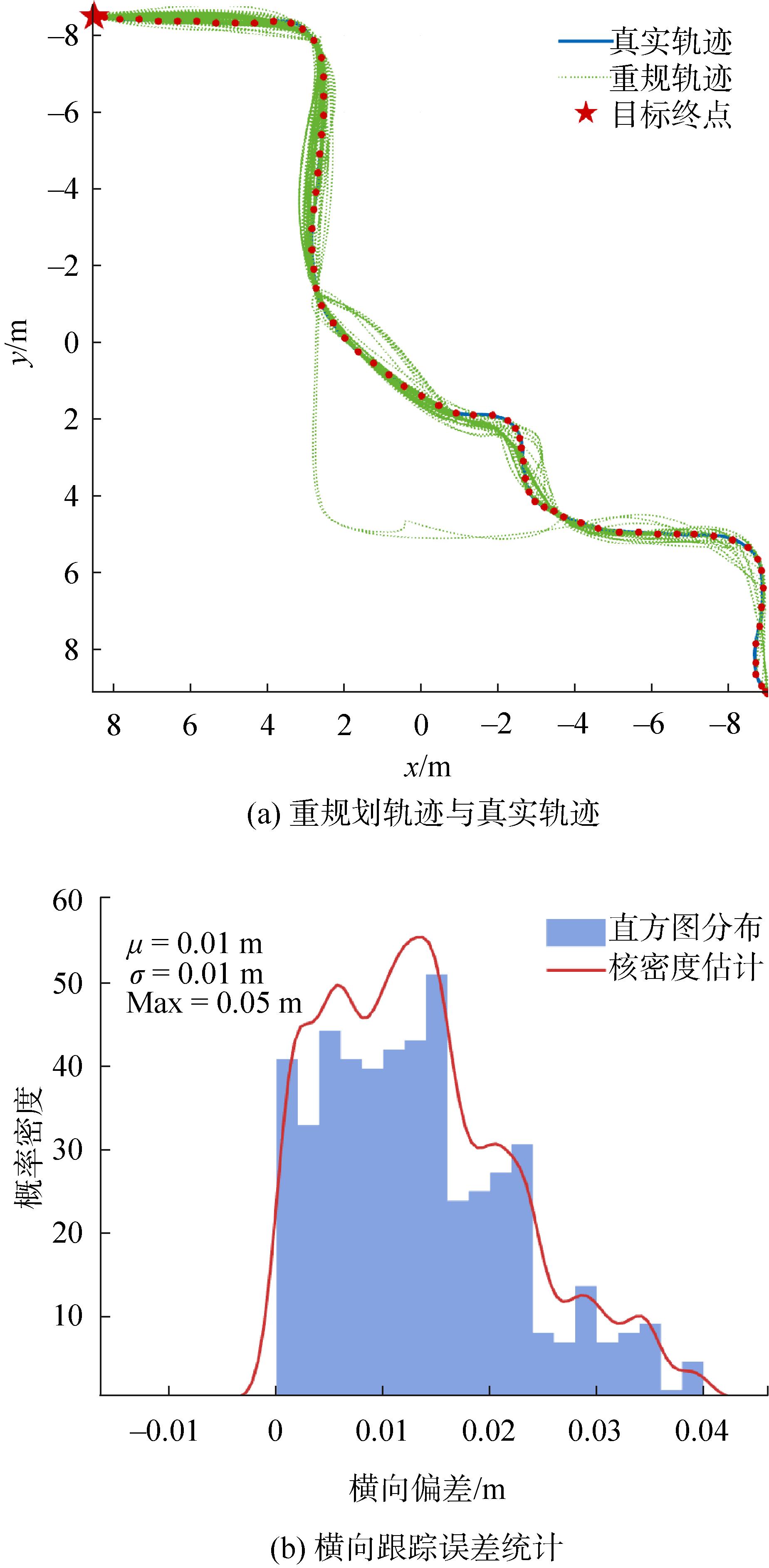
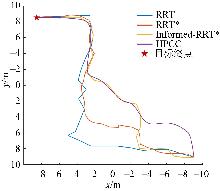
Fig. 14
Trajectory comparison plot

Fig. 15
Kinematic parameter variation curves

Fig. 16
HPCC trajectory diagram

Fig. 17
HPCC Kinematic parameter variation curves
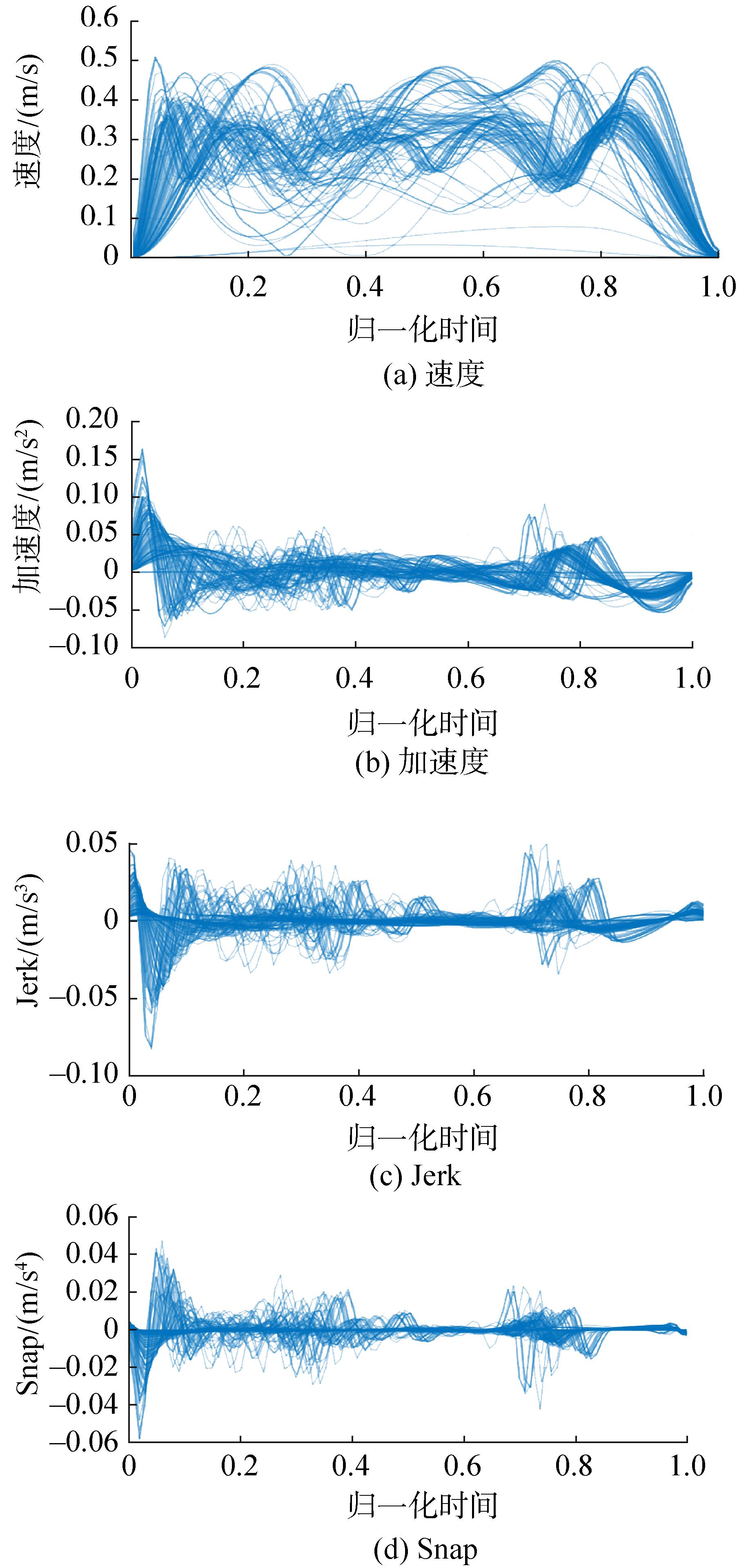
Fig. 18
A* trajectory diagram
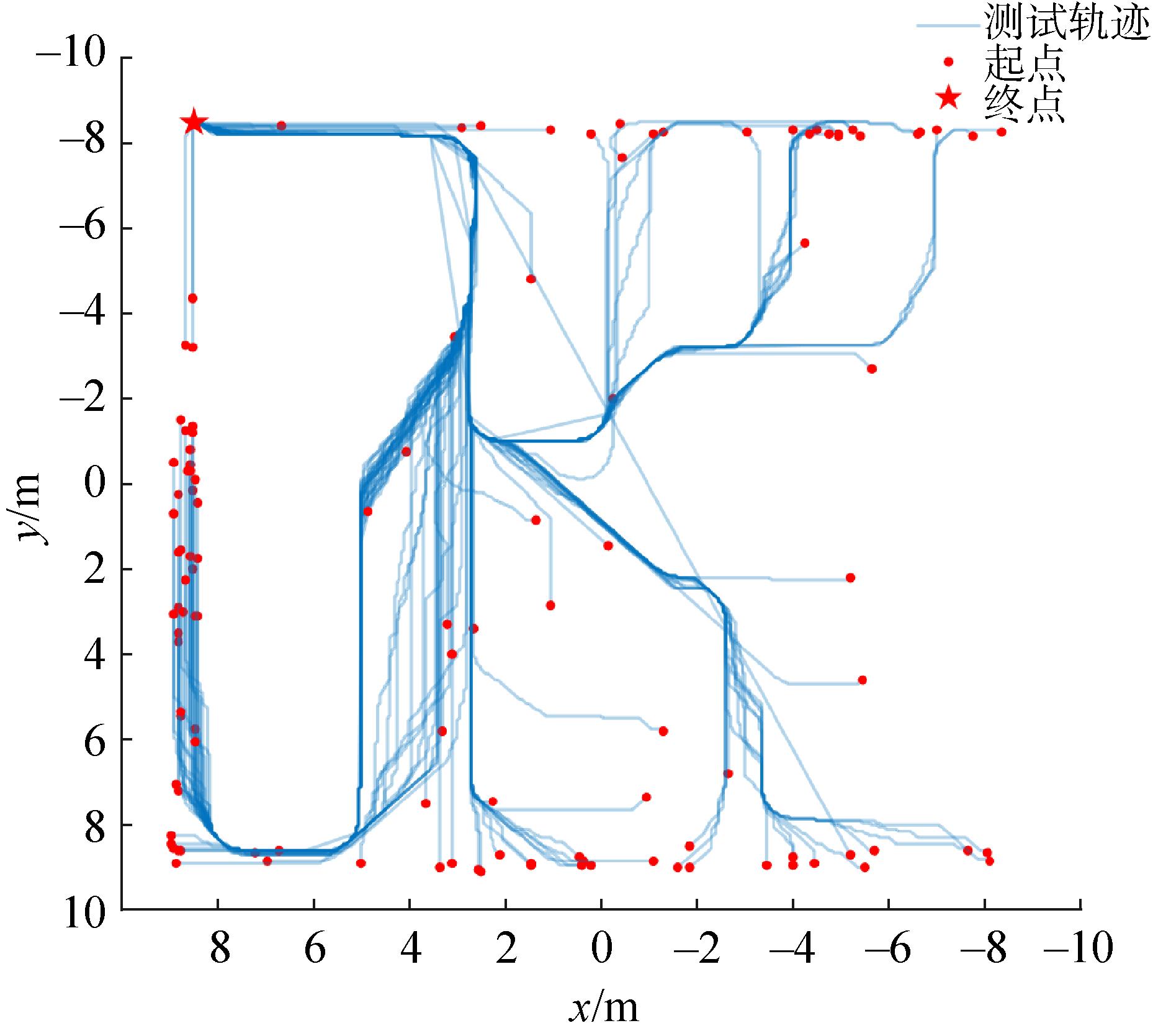
Fig. 19
A* Kinematic parameter variation curves
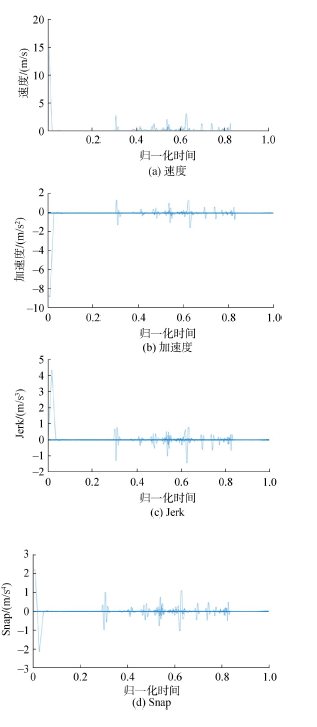
Fig. 20
HPGO trajectory diagram
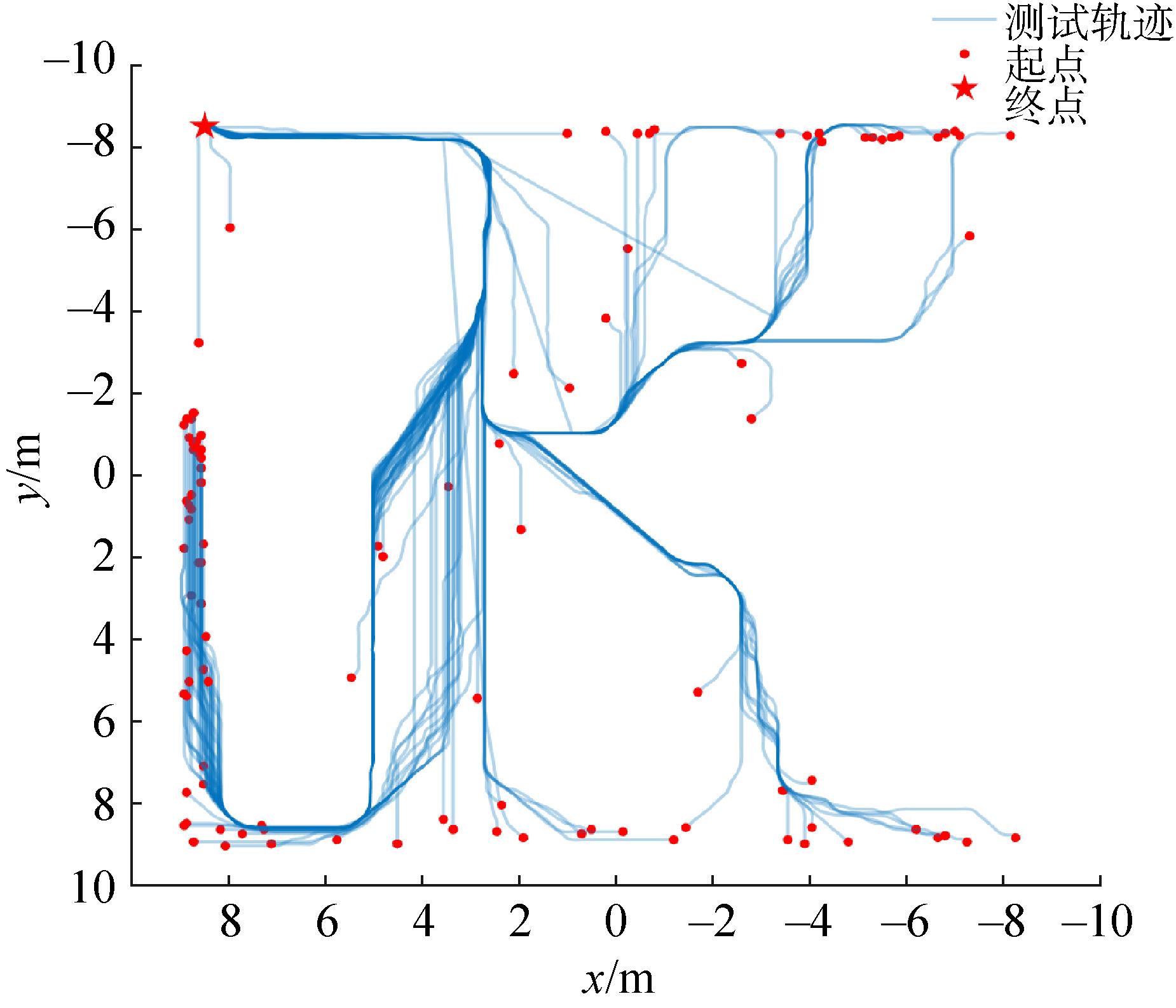

Fig. 21
HPGO Kinematic parameter variation curves
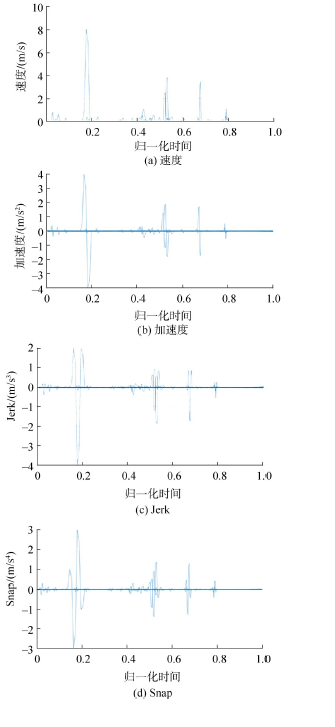
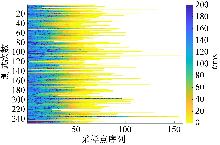
Fig. 22
Replanning computation time variation heatmap
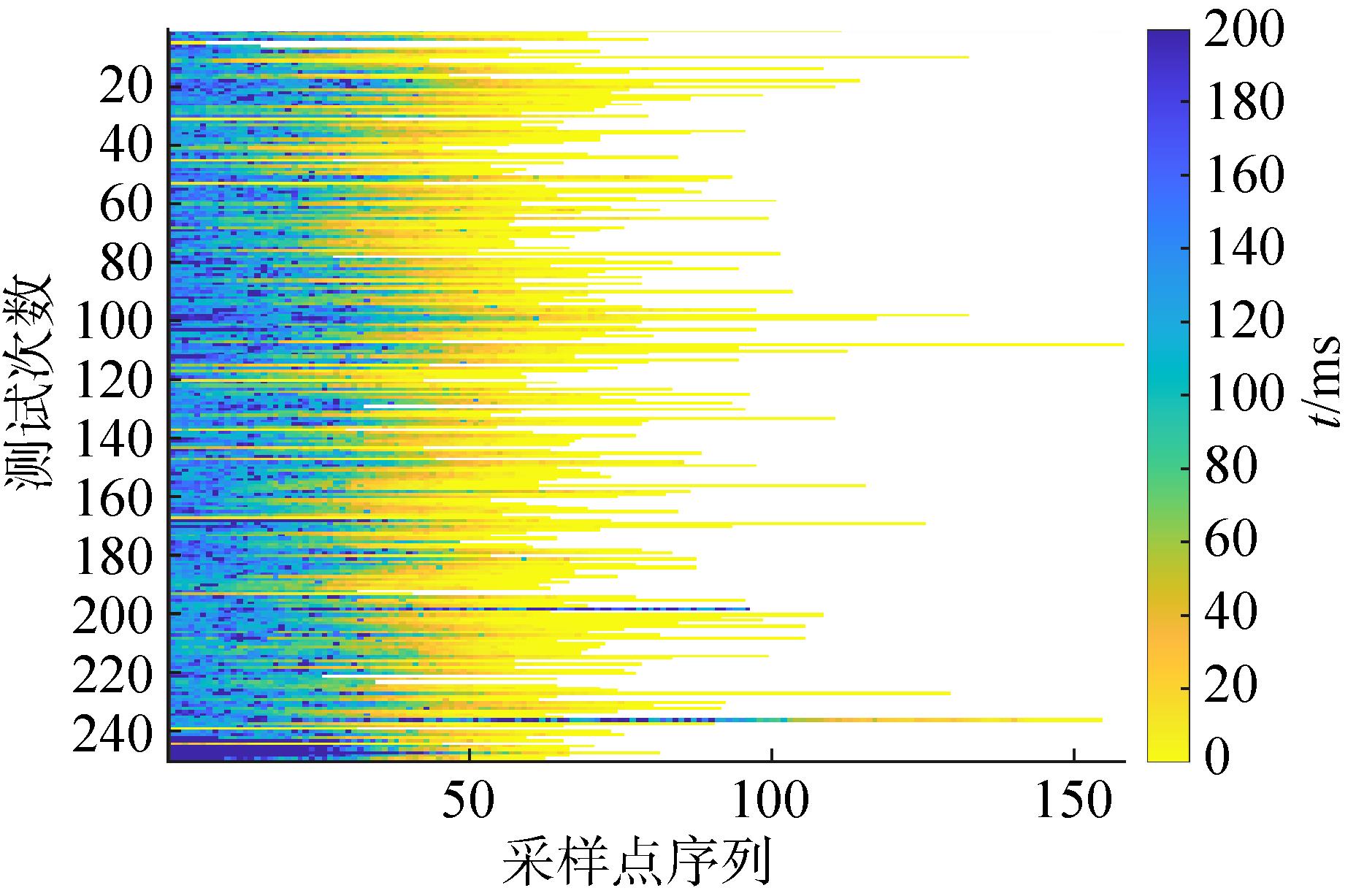
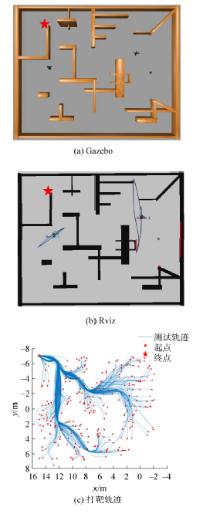
Fig. 23
Multi-Wall maze scenario and shooting trajectory
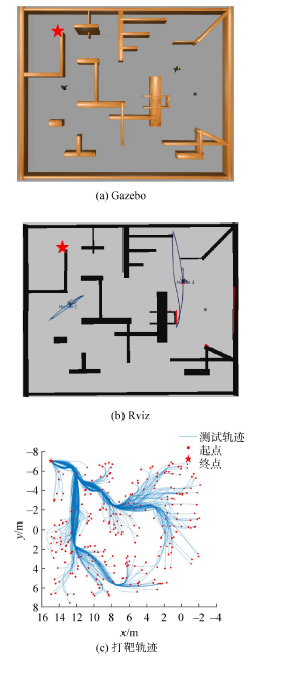
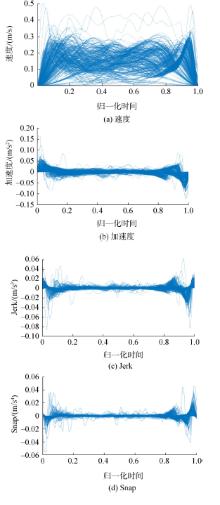
Fig. 24
Kinematic parameter variation curves under multi-wall maze scenario
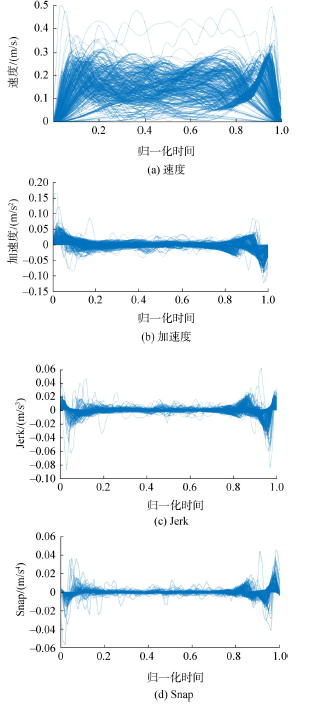
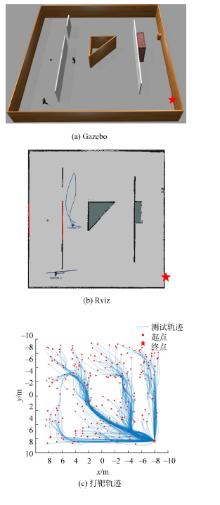
Fig. 25
Simplified indoor environment scenario and shooting trajectory
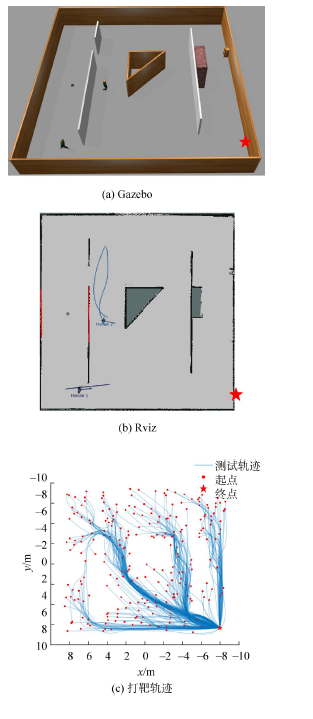
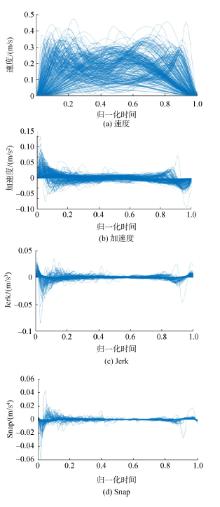
Fig. 26
Kinematic parameter variation curves under simplified indoor environment scenario
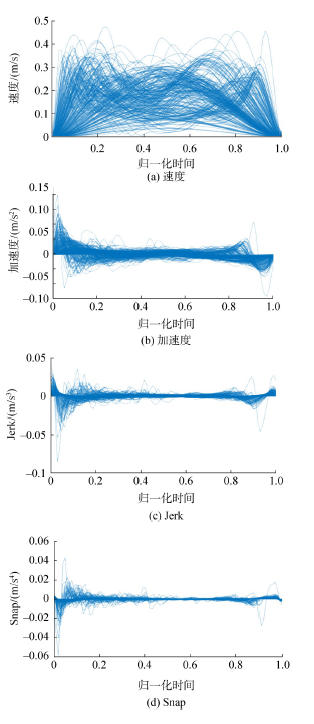
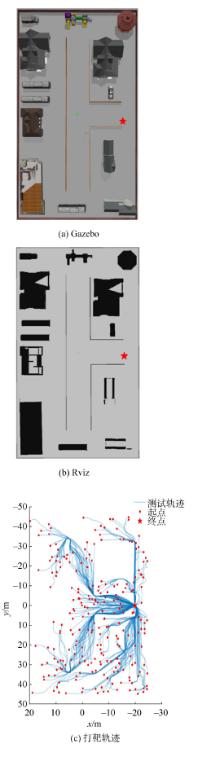
Fig. 27
Large residential area scenario and shooting trajectory
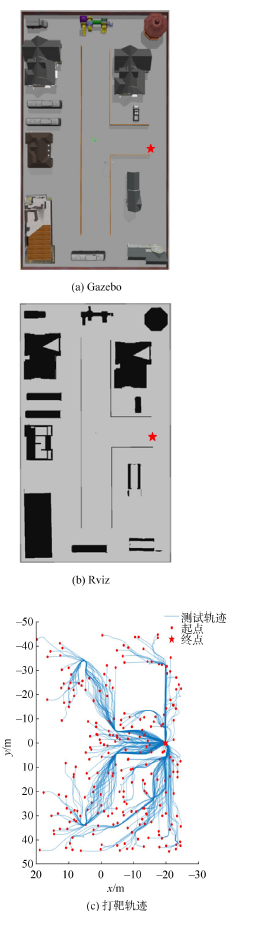

Fig. 28
Kinematic parameter variation curves under large residential area scenario
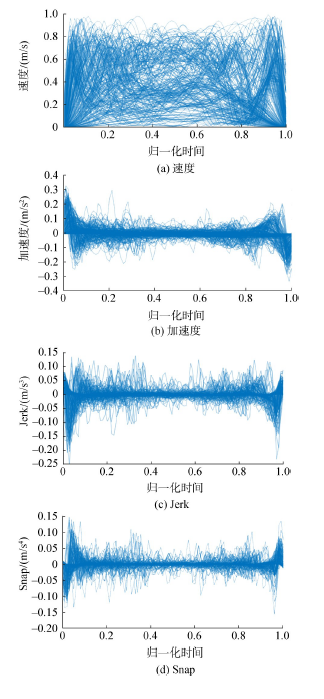

Fig. 29
Experimental equipment
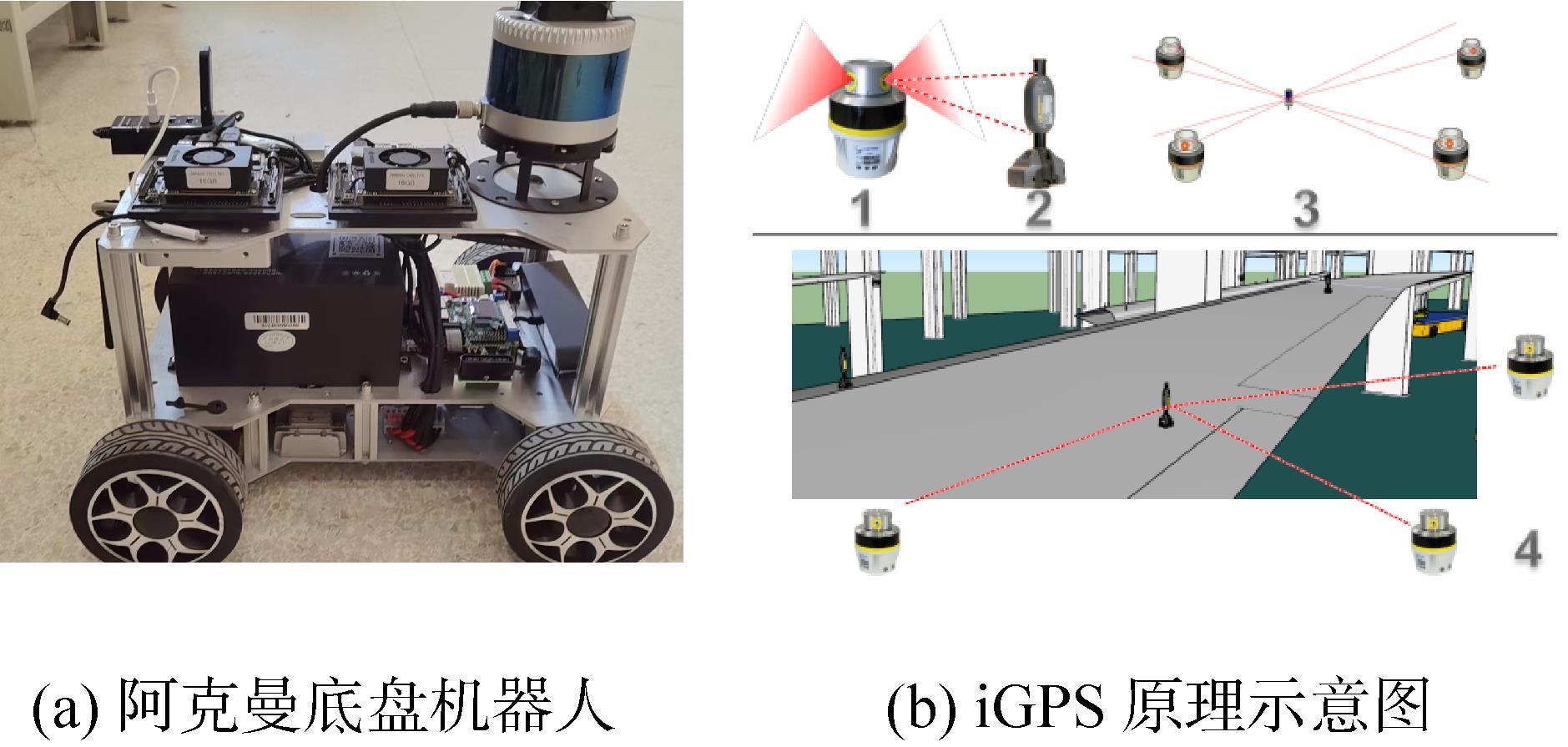
Table 2
Basic parameters of robot with Ackermann chassis
| 参数名称 | 数据 |
|---|---|
| 尺寸/mm | 445×359×206 |
| 重量/kg | 9.34 |
| 续航时间/h | 8.5 |
| 核心控制器 | STM32F407VET6 ARM架构Cortex-M4内核32位 |

Fig. 30
Experimental environment
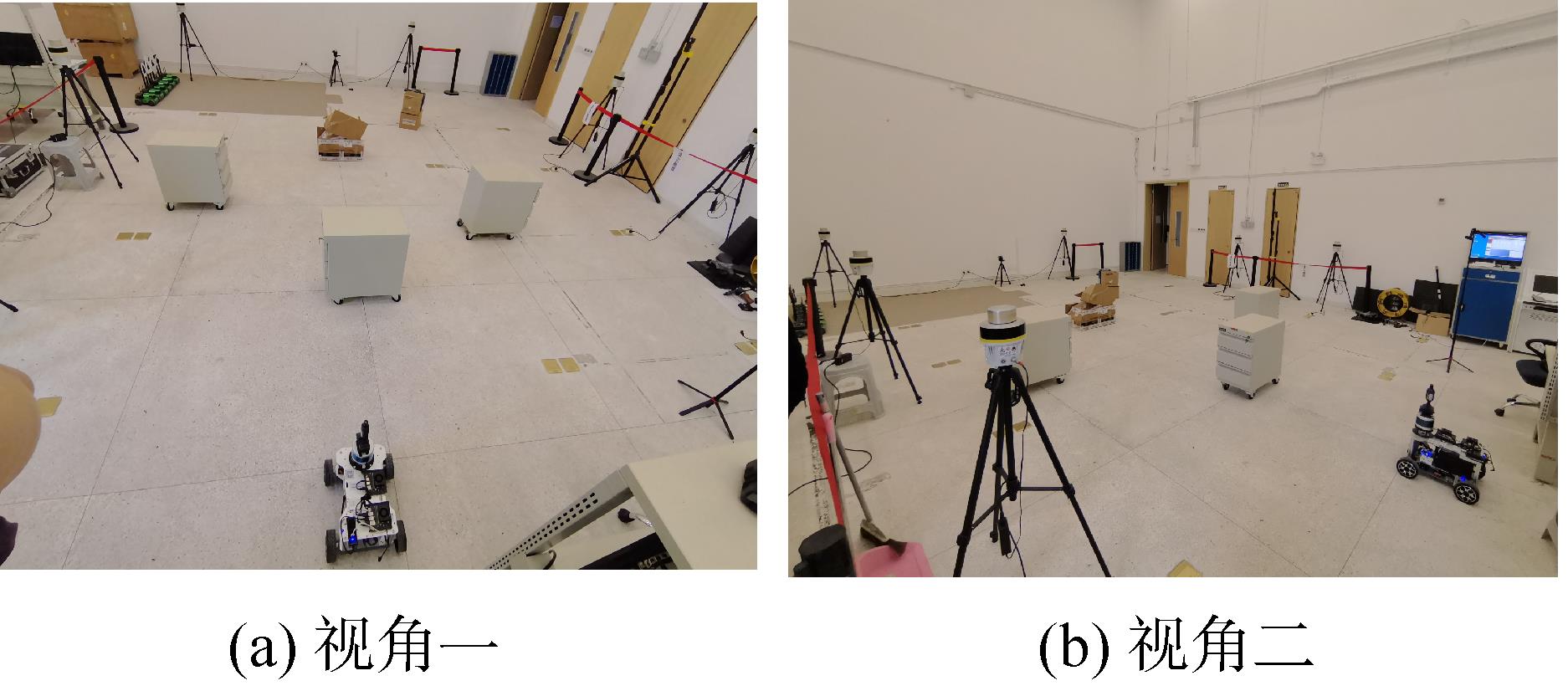
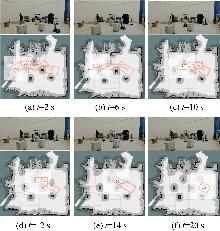
Fig. 31
Experimental process diagram
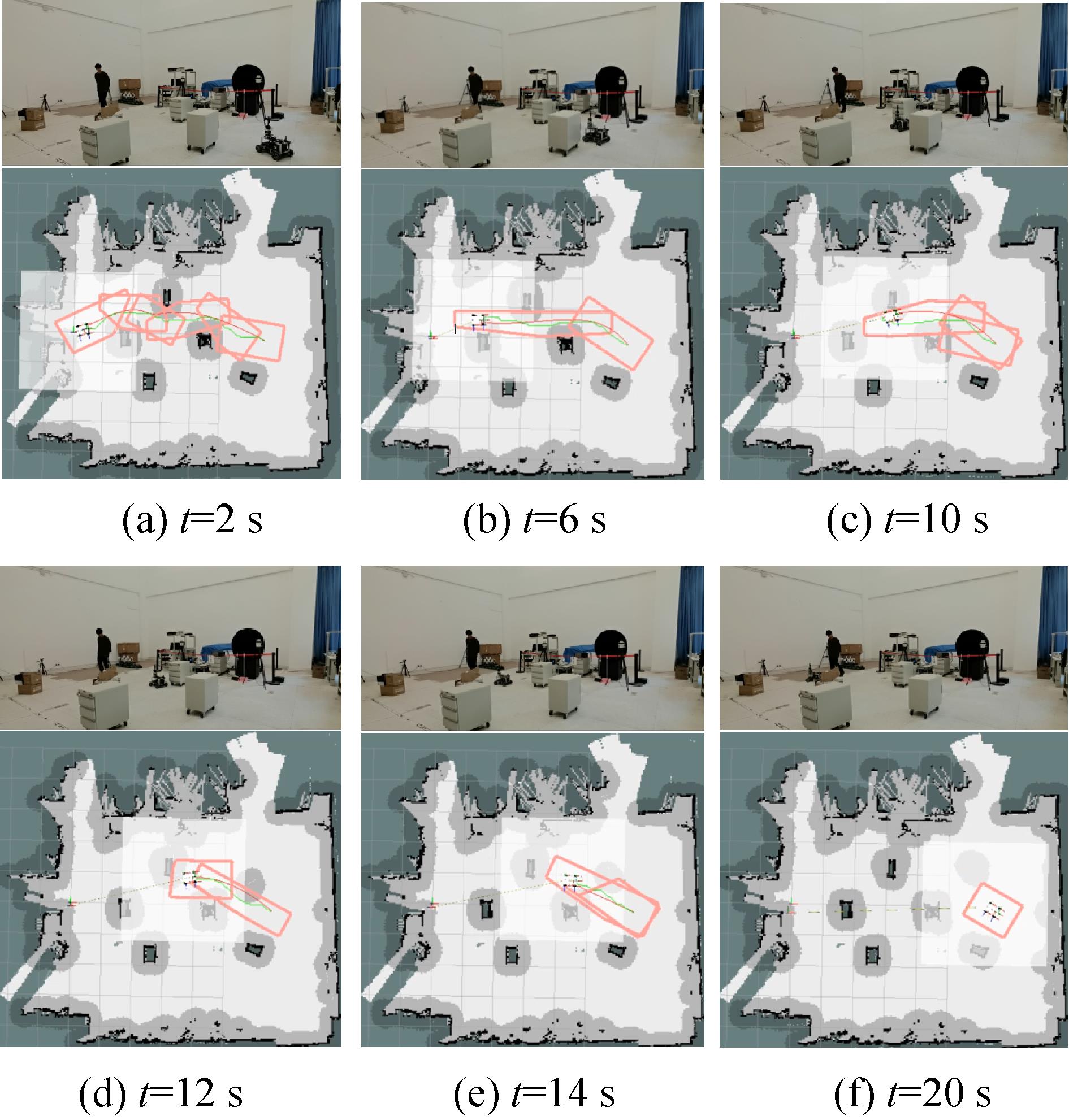
Fig. 32
Comparison of trajectories output by planner, iGPS, and odometer
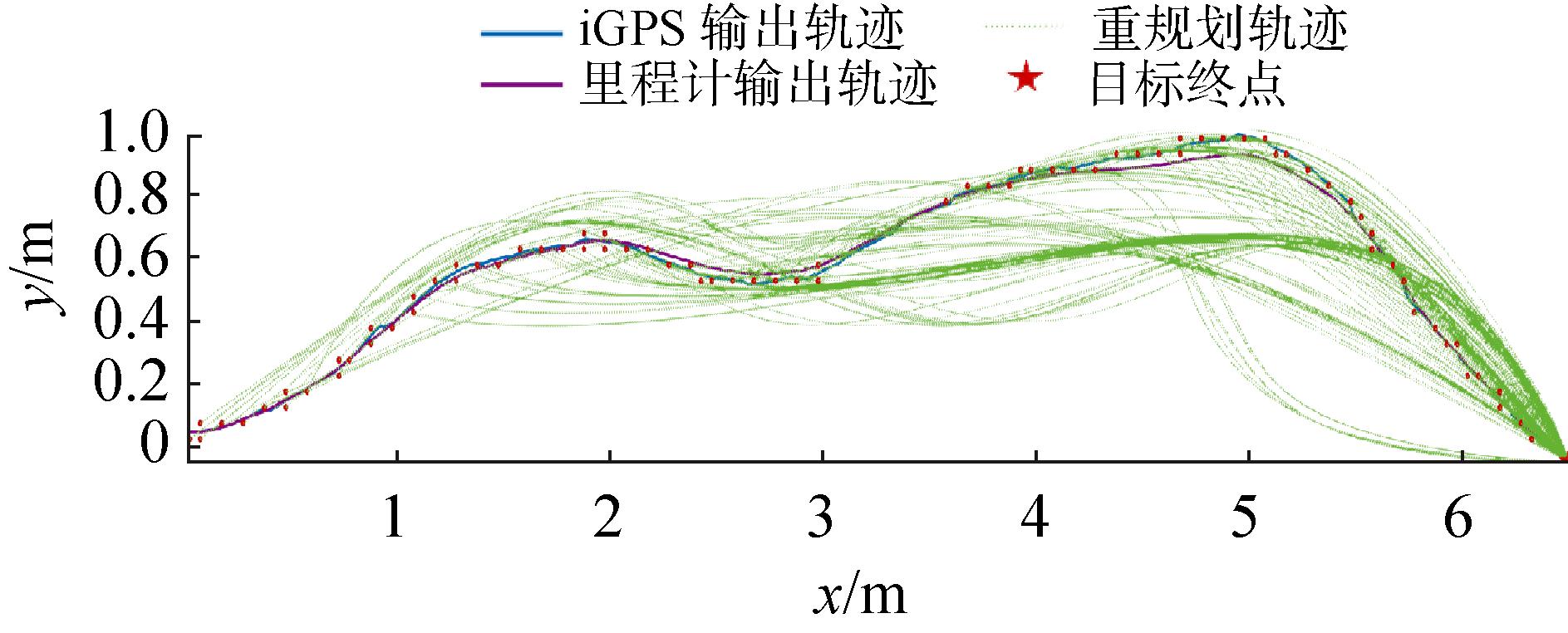
Fig. 33
Variation curves of kinematic parameters
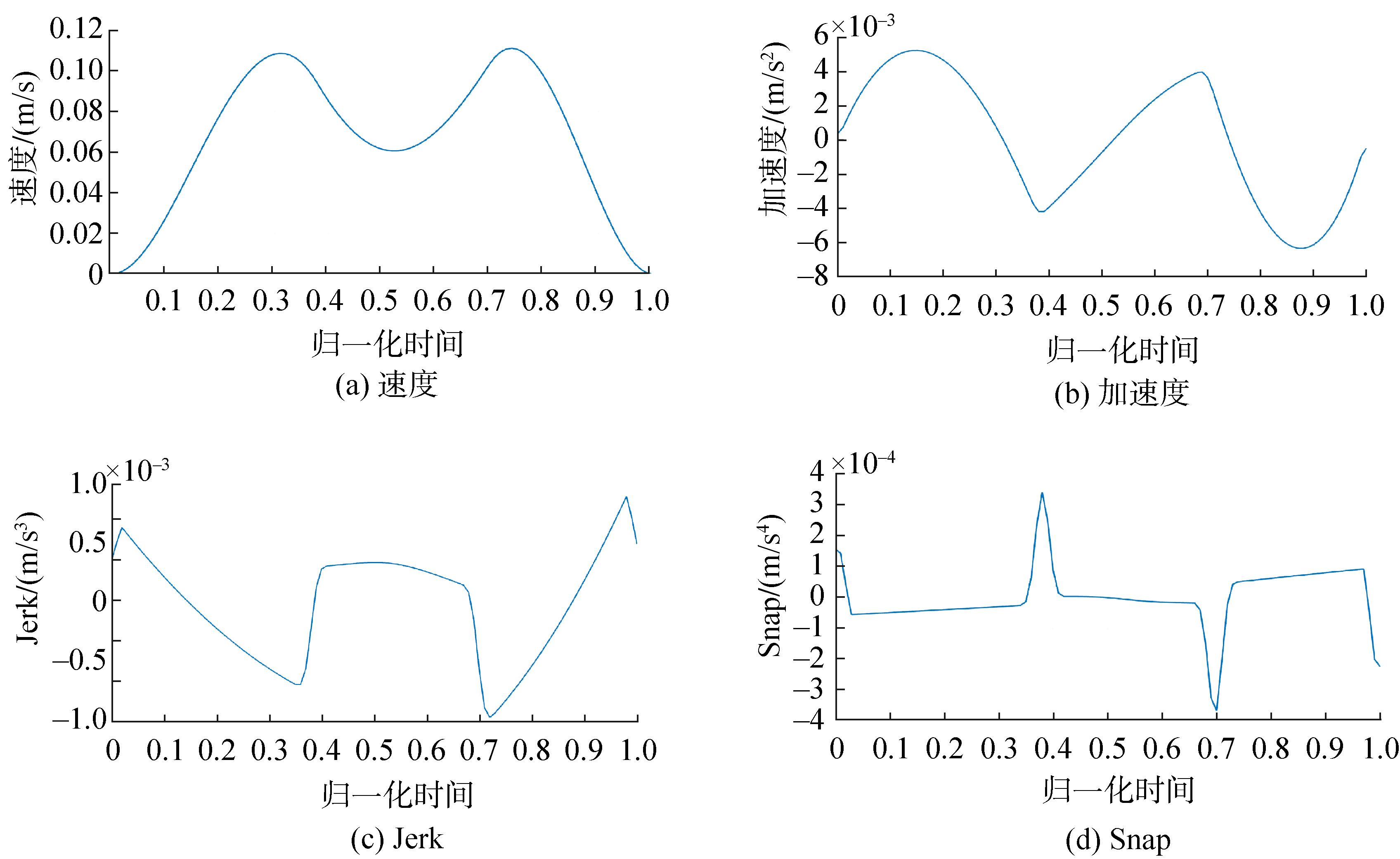
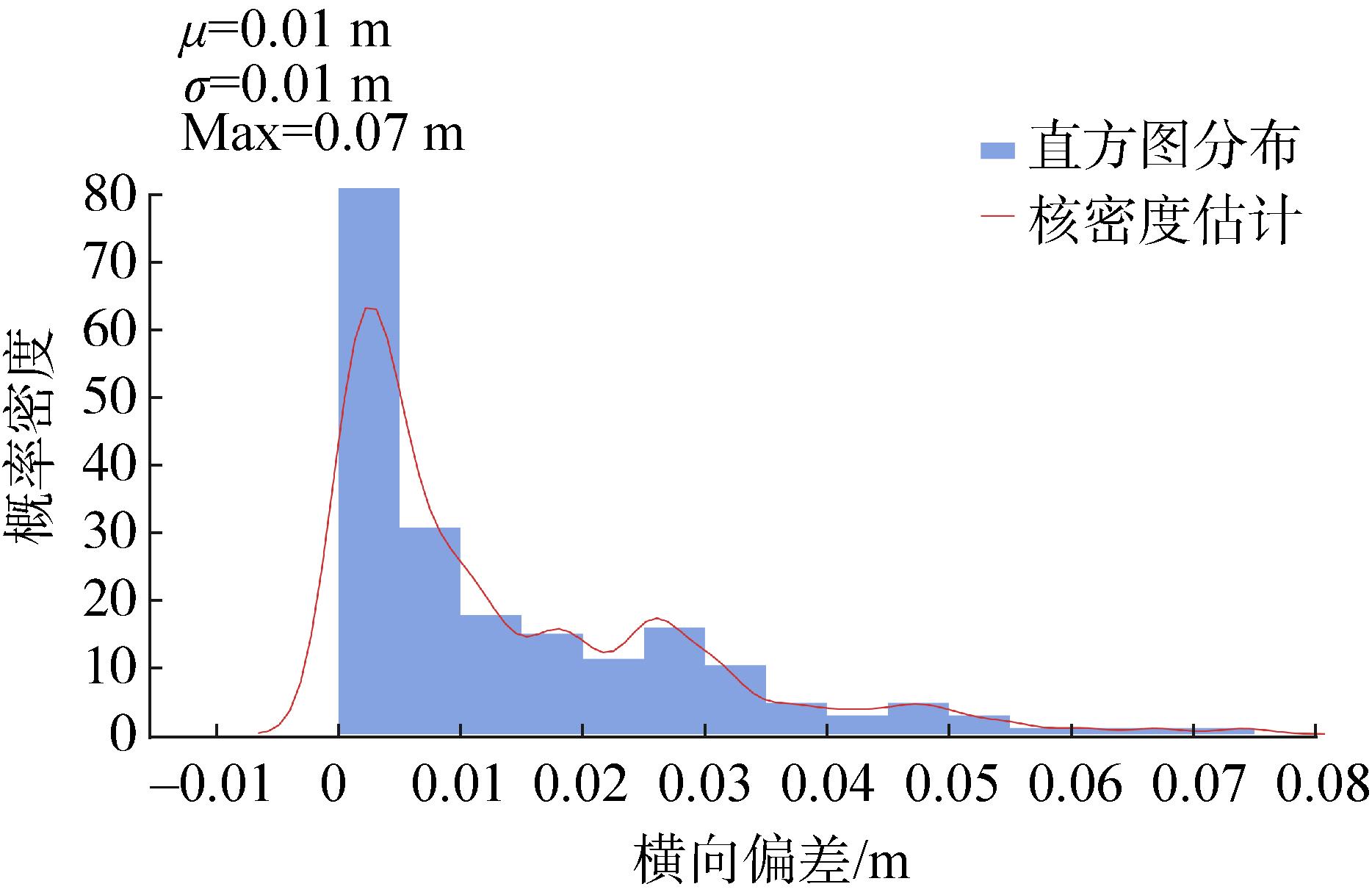
Fig. 34
Kernel density curve and histogram of lateral tracking errors
| [1] | 王雅清, 倪晓昌, 李静, 等. 移动机器人路径规划算法研究进展[J]. 智能计算机与应用, 2024, 14(11): 211-217. |
| Wang Yaqing, Ni Xiaochang, Li Jing, et al. Research on Path Planning Algorithm Based on Mobile Robot[J]. Intelligent Computer and Applications, 2024, 14(11): 211-217. | |
| [2] | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| [3] | LaValle S. Rapidly-exploring Random Trees: A New Tool for Path Planning[J]. Research Report, 1998. |
| [4] | Zucker M, Ratliff N, Dragan A D, et al. CHOMP: Covariant Hamiltonian Optimization for Motion Planning[J]. The International Journal of Robotics Research, 2013, 32(9/10): 1164-1193. |
| [5] | Mukadam M, Dong Jing, Yan Xinyan, et al. Continuous-time Gaussian Process Motion Planning via Probabilistic Inference[J]. The International Journal of Robotics Research, 2018, 37(11): 1319-1340. |
| [6] | Dolgov D, Thrun S, Montemerlo M, et al. Practical Search Techniques in Path Planning for Autonomous Driving[J]. ann arbor, 2008, 1001(48105): 18-80. |
| [7] | Pivtoraiko M, Knepper R A, Kelly A. Differentially Constrained Mobile Robot Motion Planning in State Lattices[J]. Journal of Field Robotics, 2009, 26(3): 308-333. |
| [8] | Werling Moritz, Kammel Sören, Ziegler Julius, et al. Optimal Trajectories for Time-critical Street Scenarios Using Discretized Terminal Manifolds[J]. The International Journal of Robotics Research, 2012, 31(3): 346-359. |
| [9] | Deits R, Tedrake R. Computing Large Convex Regions of Obstacle-free Space Through Semidefinite Programming[M]//H Levent Akin, Amato N M, Isler V, et al. Algorithmic Foundations of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic Foundations of Robotics. Cham: Springer International Publishing, 2015: 109-124. |
| [10] | Cheng Zikang, Xue Jingbo, Wang Bo, et al. Path Planning Using Improved Hybrid A* Algorithm for Mobile Robots[C]//2024 IEEE 25th China Conference on System Simulation Technology and its Application (CCSSTA). Piscataway: IEEE, 2024: 352-357. |
| [11] | 夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46(9): 3070-3081. |
| Xia Yuqi, Huang Yanyan, Chen Qia. Path Planning for Unmanned Vehicle Reconnaissance Based on Deep Q-network[J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. | |
| [12] | Tian Zhaofeng, Liu Zichuan, Zhou Xingyu, et al. Unguided Self-exploration in Narrow Spaces with Safety Region Enhanced Reinforcement Learning for Ackermann-steering Robots[C]//2024 IEEE International Conference on Mobility, Operations, Services and Technologies (MOST). Piscataway: IEEE, 2024: 260-268. |
| [13] | Mellinger D, Kumar V. Minimum Snap Trajectory Generation and Control for Quadrotors[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 2520-2525. |
| [14] | Gao Fei, Wu W, Lin Yi, et al. Online Safe Trajectory Generation for Quadrotors Using Fast Marching Method and Bernstein Basis Polynomial[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2018: 344-351. |
| [15] | Liu Sikang, Watterson M, Mohta K, et al. Planning Dynamically Feasible Trajectories for Quadrotors Using Safe Flight Corridors in 3-D Complex Environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695. |
| [16] | Douglas David H, Peucker Thomas K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J]. Cartographica, 1973, 10(2): 112-122. |
| [17] | Stellato B, Banjac Goran, Goulart P, et al. OSQP: An Operator Splitting Solver for Quadratic Programs[J]. Mathematical Programming Computation, 2020, 12(4): 637-672. |
| [18] | AI-WINTER. Ros_Motion_Planning[EB/OL]. [2025-04-10]. . |
| [19] | LaValle S M, Kuffner Jr J J. Randomized Kinodynamic Planning[J]. The International Journal of Robotics Research, 2001, 20(5): 378-400. |
| [20] | Karaman S, Frazzoli E. Sampling-based Algorithms for Optimal Motion Planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| [21] | Gammell Jonathan D, Srinivasa S S, Barfoot Timothy D. Informed RRT*: Optimal Sampling-based Path Planning Focused via Direct Sampling of an Admissible Ellipsoidal Heuristic[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2014: 2997-3004. |
| [22] | Depenthal C. iGPS Used as Kinematic Measuring System[C]//FIG Congress. [S.l. : s.n.], 2010: 11-16. |
| [23] | Schmitt Robert, Nisch S, Schönberg A, et al. Performance Evaluation of iGPS for Industrial Applications[C]//2010 International Conference on Indoor Positioning and Indoor Navigation. Piscataway: IEEE, 2010: 1-8. |
| [24] | Wang Zheng, Mastrogiacomo Luca, Franceschini Fiorenzo, et al. Experimental Comparison of Dynamic Tracking Performance of iGPS and Laser Tracker[J]. The International Journal of Advanced Manufacturing Technology, 2011, 56(1): 205-213. |
| [25] | Norman A, Schönberg A, Gorlach I, et al. Cooperation of Industrial Robots with Indoor-GPS[C]//Proceedings of the International Conference on Competitive Manufacturing. [S.l. : s.n.], 2010: 215-224. |
| [1] | Yang Chao, Zheng Ruiqun, Li Zhen, Zhang Hongwei, Tang Yanqun, Li Dongze. Parallel Task Transmission and Processing Optimization Scheme for UAV-assisted Internet of Vehicles [J]. Journal of System Simulation, 2025, 37(3): 635-645. |
| [2] | Xu Qiang, Xu Jianlei, Hu Yanhai, Chen Haihui, Zhang Xing, Xing Zhaohui. Trajectory Optimization of Robotic Arm Based on Improved Simulated Annealing Genetic Algorithm [J]. Journal of System Simulation, 2025, 37(2): 404-412. |
| [3] | Huang Sijin, Wen Jia, Chen Zheyi. Intelligent Service Migration towards MEC-based IoV Systems [J]. Journal of System Simulation, 2025, 37(2): 379-391. |
| [4] | Zheng Jiayu, Mai Zhuxue, Chen Zheyi. Optimization of Service Caching and Computation Offloading in Digital Twin Cloud-edge Networks [J]. Journal of System Simulation, 2025, 37(11): 2741-2753. |
| [5] | Wang Xinpeng, Fu Huiqiao, Deng Guizhou, Tang Kaiqiang, Chen Chunlin, Liu Canghai. Research on Motion Planning of Hexapod Robot Based on DRL and Free Gait [J]. Journal of System Simulation, 2024, 36(2): 373-384. |
| [6] | Ding Kaiyuan, Hamdulla Askar, Zhu Bin, Firkat Eksan, Ma Zhengtang. End-to-end Motion Planning of Unmanned Vehicles Based on Multimodal Deep Reinforcement Learning [J]. Journal of System Simulation, 2024, 36(11): 2631-2643. |
| [7] | Jiao Songming, Shou Yunfeng, Bai Jianpeng, Wang Zhu. Research on Hierarchical Motion Planning Method for UAV Substation Inspection [J]. Journal of System Simulation, 2023, 35(9): 1975-1984. |
| [8] | Shu Ye, Xiaodong Ji, Wenhua Li. Research on Physical Layer Security of Full-Duplex UAV Relaying [J]. Journal of System Simulation, 2022, 34(4): 788-796. |
| [9] | Bin Xu, Wenqing Yan, Zhuofan Han, Guangshen He, Tao Deng, Yunkai Zhao, Jin Qi. Research on Collaborative Computing Offloading Model for Base Station Groups Based on Fireworks Algorithm [J]. Journal of System Simulation, 2022, 34(2): 354-365. |
| [10] | Liao Ying, Ji Haiyu, Xue Gaoxiong. Optimal Closed-Loop Guidance for Cruise Missiles Based on Pseudospectral Method [J]. Journal of System Simulation, 2018, 30(9): 3464-3471. |
| [11] | Li Xiaosu, Chao Tao, Wang Songyan. Trajectory Optimization Design of Ascending Phase for Solid Launch Vehicle Based on Fish-swarm Algorithm [J]. Journal of System Simulation, 2018, 30(12): 4747-4754. |
| [12] | Tao Chao. Trajectory Optimization and Tracking Controller Based on Gauss Pseudo Spectral Method for Hypersonic Vehicle [J]. Journal of System Simulation, 2017, 29(4): 865-872. |
| [13] | Guo Zuhua, Wang Shenjiang, Zhao Shijie. Motion Planning Algorithm Based on Overall Trajectory for Locomotion of 6-legged Robot [J]. Journal of System Simulation, 2015, 27(11): 2682-2688. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
