

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (6): 1425-1432.doi: 10.16182/j.issn1004731x.joss.23-0137
• Papers • Previous Articles Next Articles
Zhou Zhiyong1( ), Mo Fei1, Zhao Kai2, Hao Yunbo2, Qian Yufeng1
), Mo Fei1, Zhao Kai2, Hao Yunbo2, Qian Yufeng1
Received:2023-02-14
Revised:2023-04-21
Online:2024-06-28
Published:2024-06-19
CLC Number:
Zhou Zhiyong, Mo Fei, Zhao Kai, Hao Yunbo, Qian Yufeng. Adaptive PID Control Algorithm Based on PPO[J]. Journal of System Simulation, 2024, 36(6): 1425-1432.
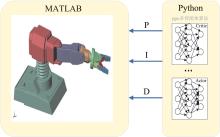
Fig. 1
3D model of robotic arm
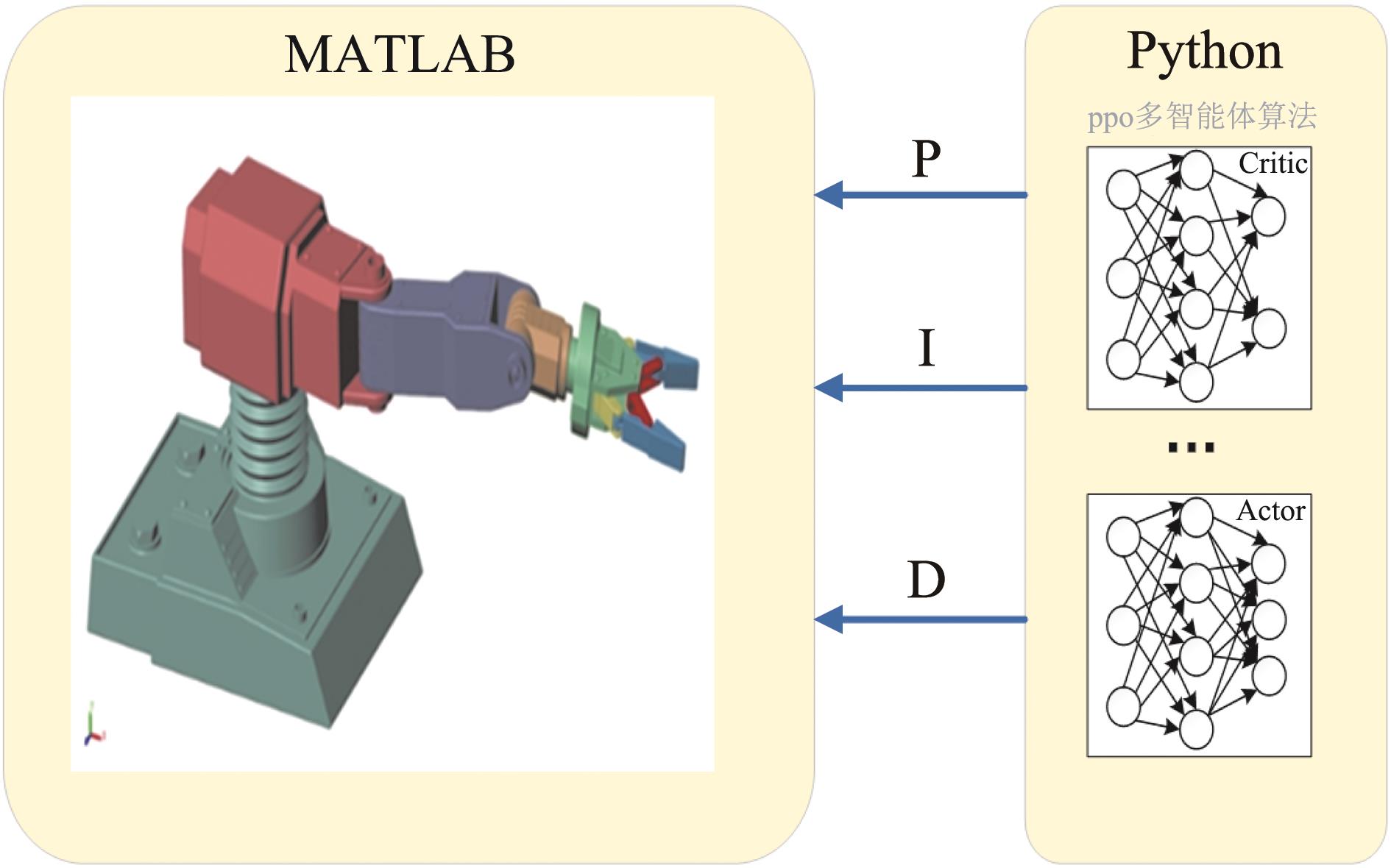
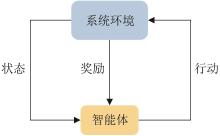
Fig. 2
RL-structure

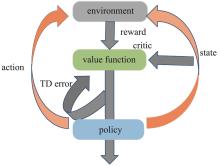
Fig. 3
Actor-critic structure
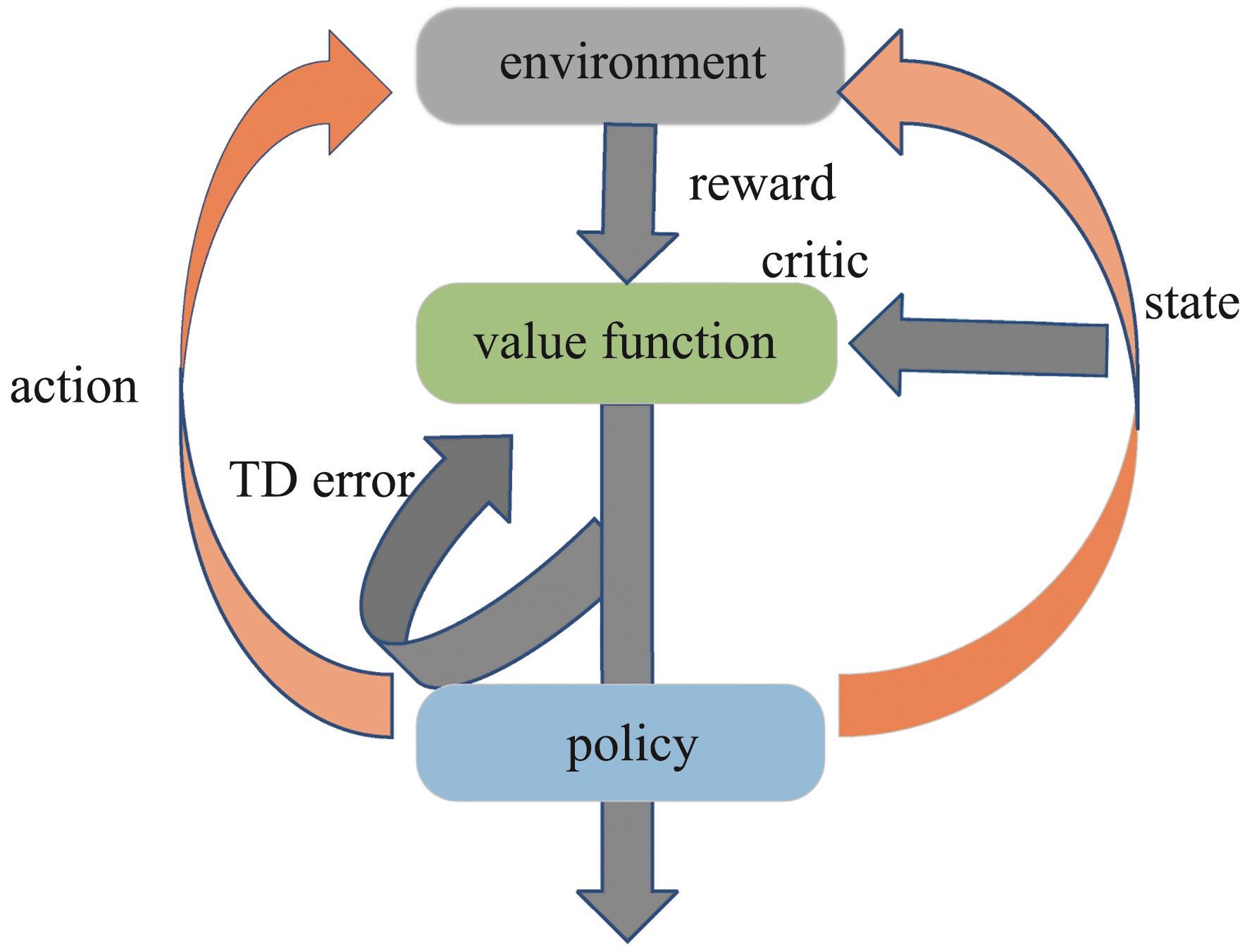
Fig. 4
Controller design
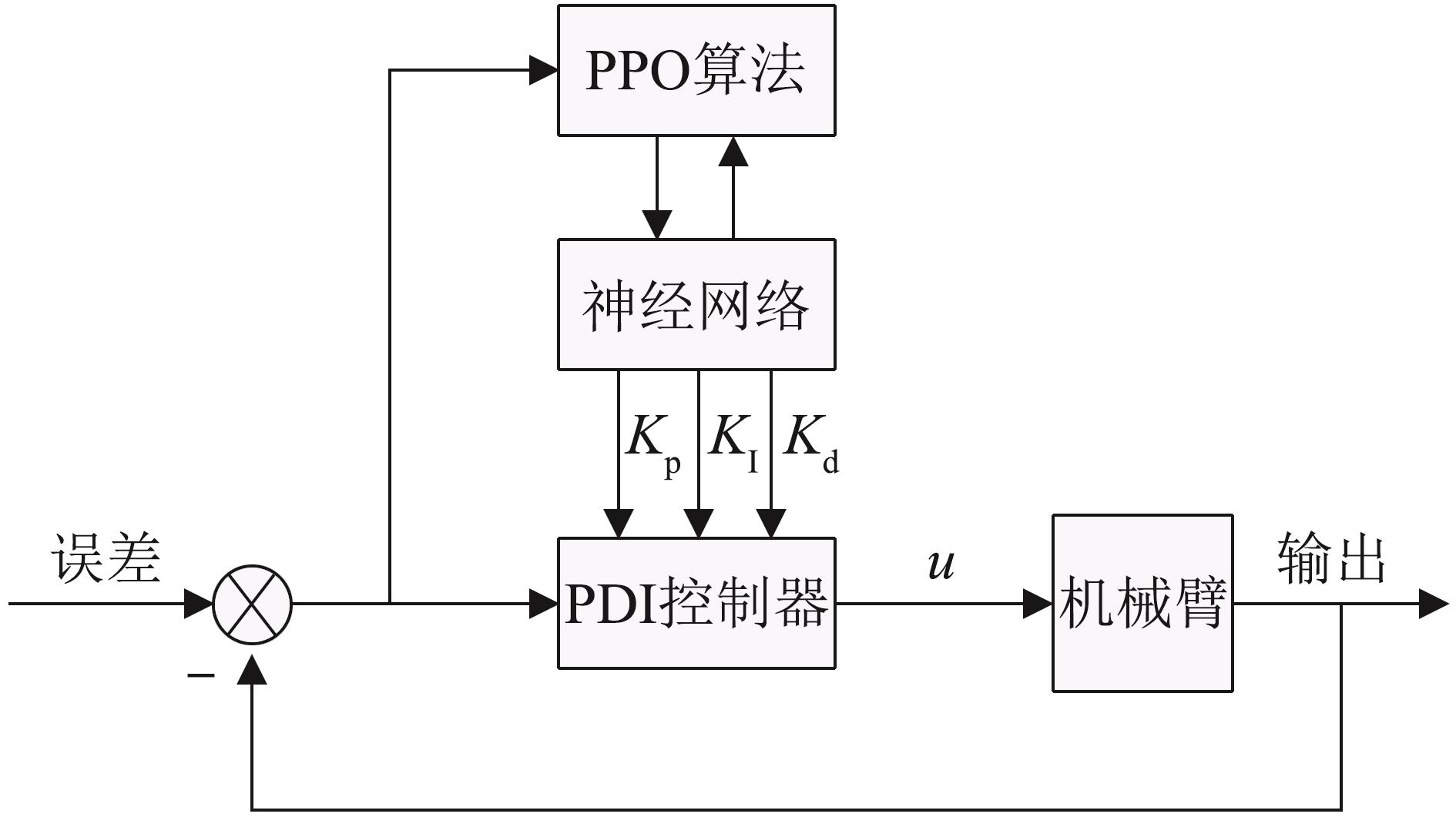
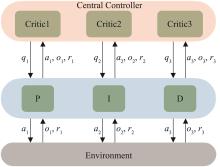
Fig. 5
Multi-agent structure
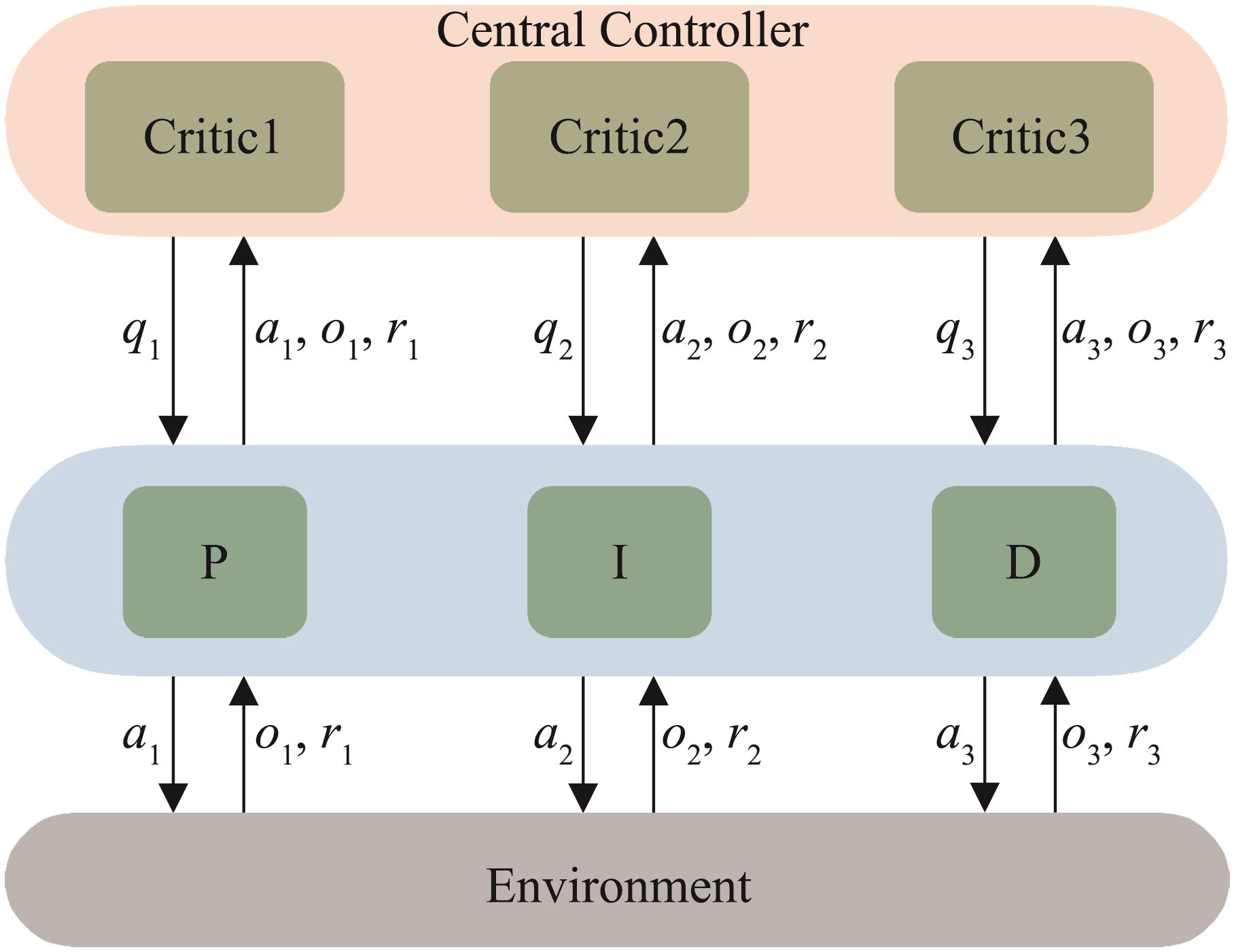
Fig. 6
Input/output analysis
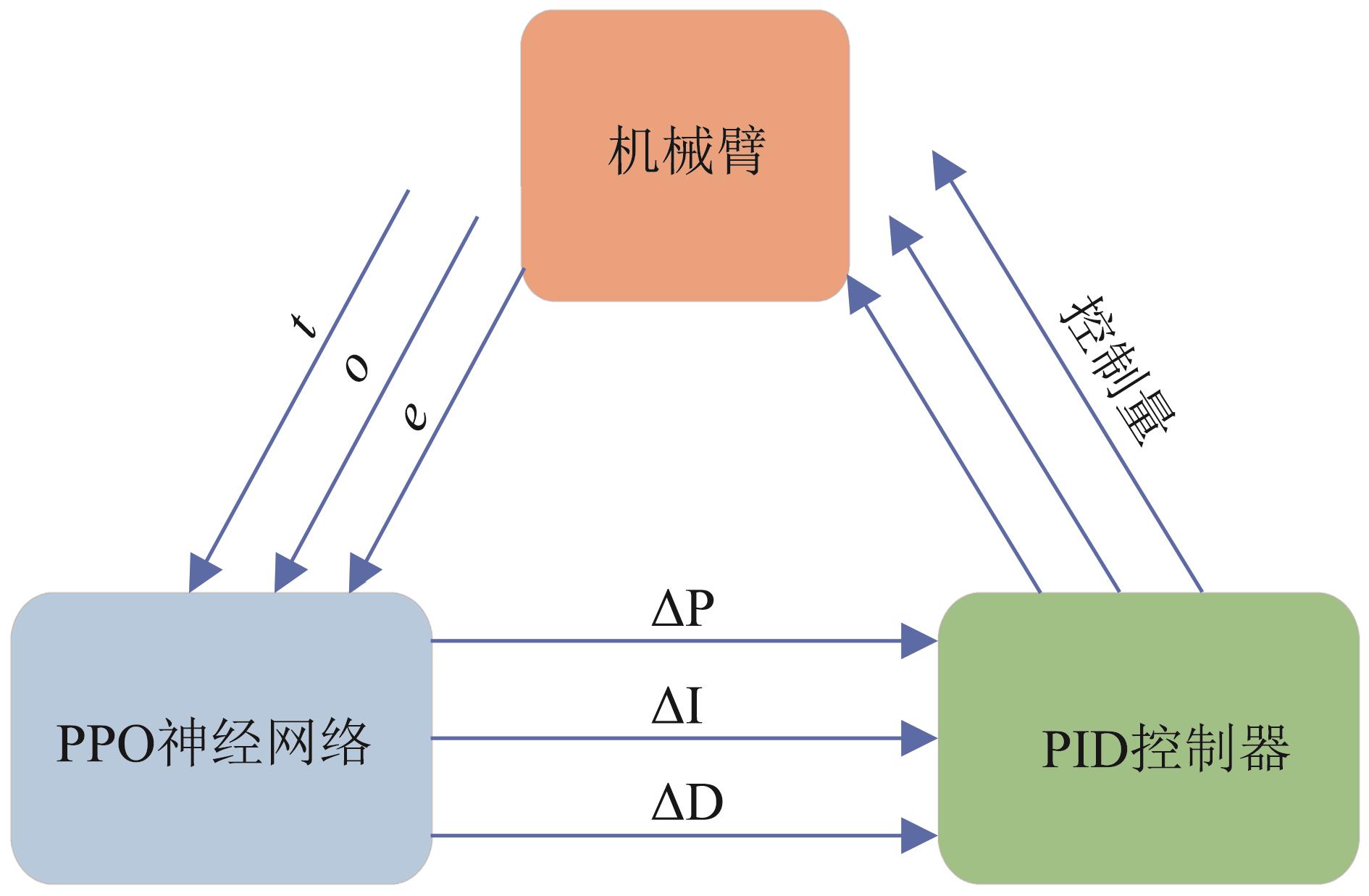
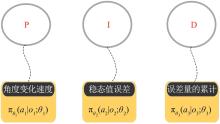
Fig. 7
Parameter analysis
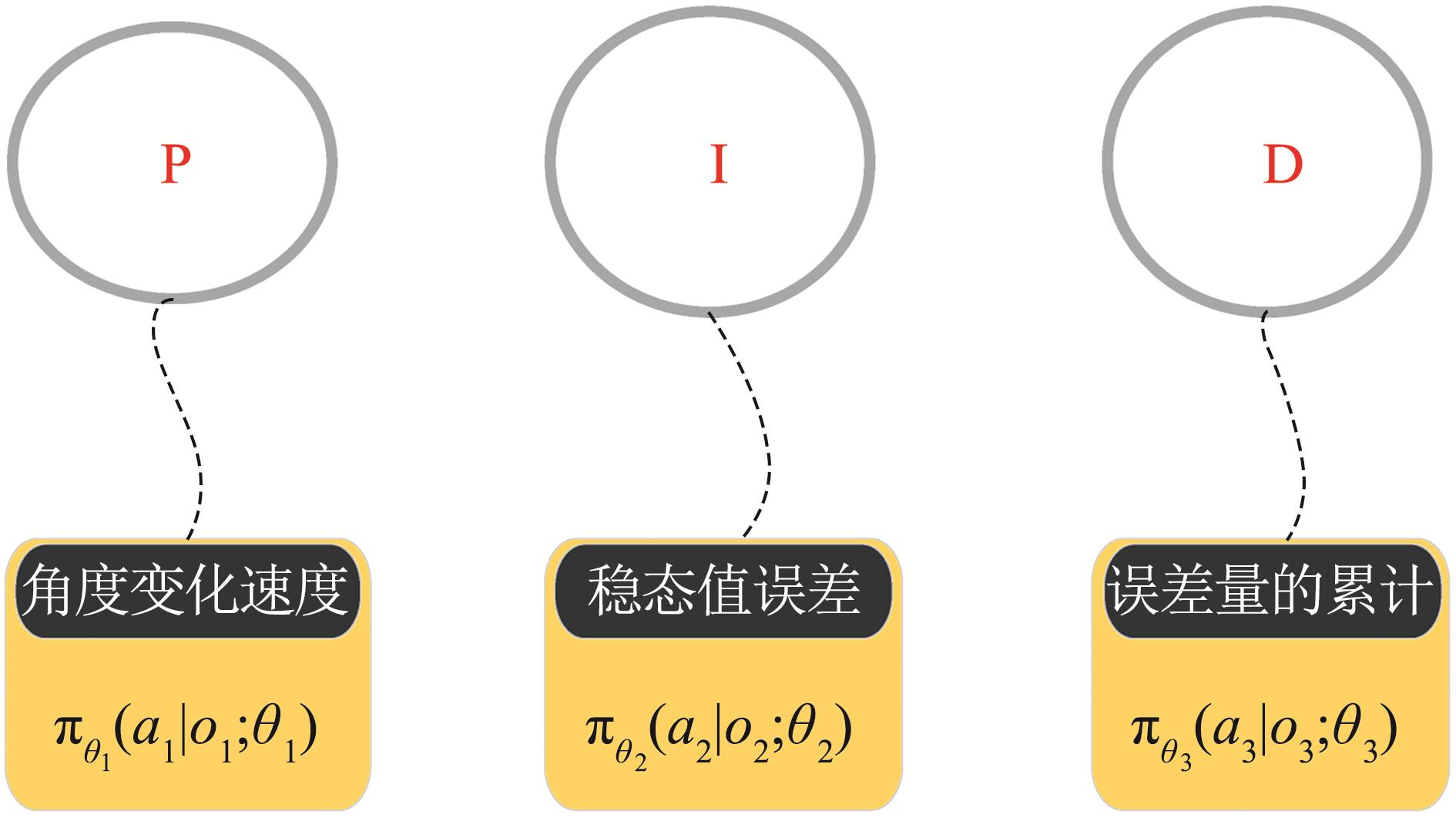
Fig. 8
Overall training process
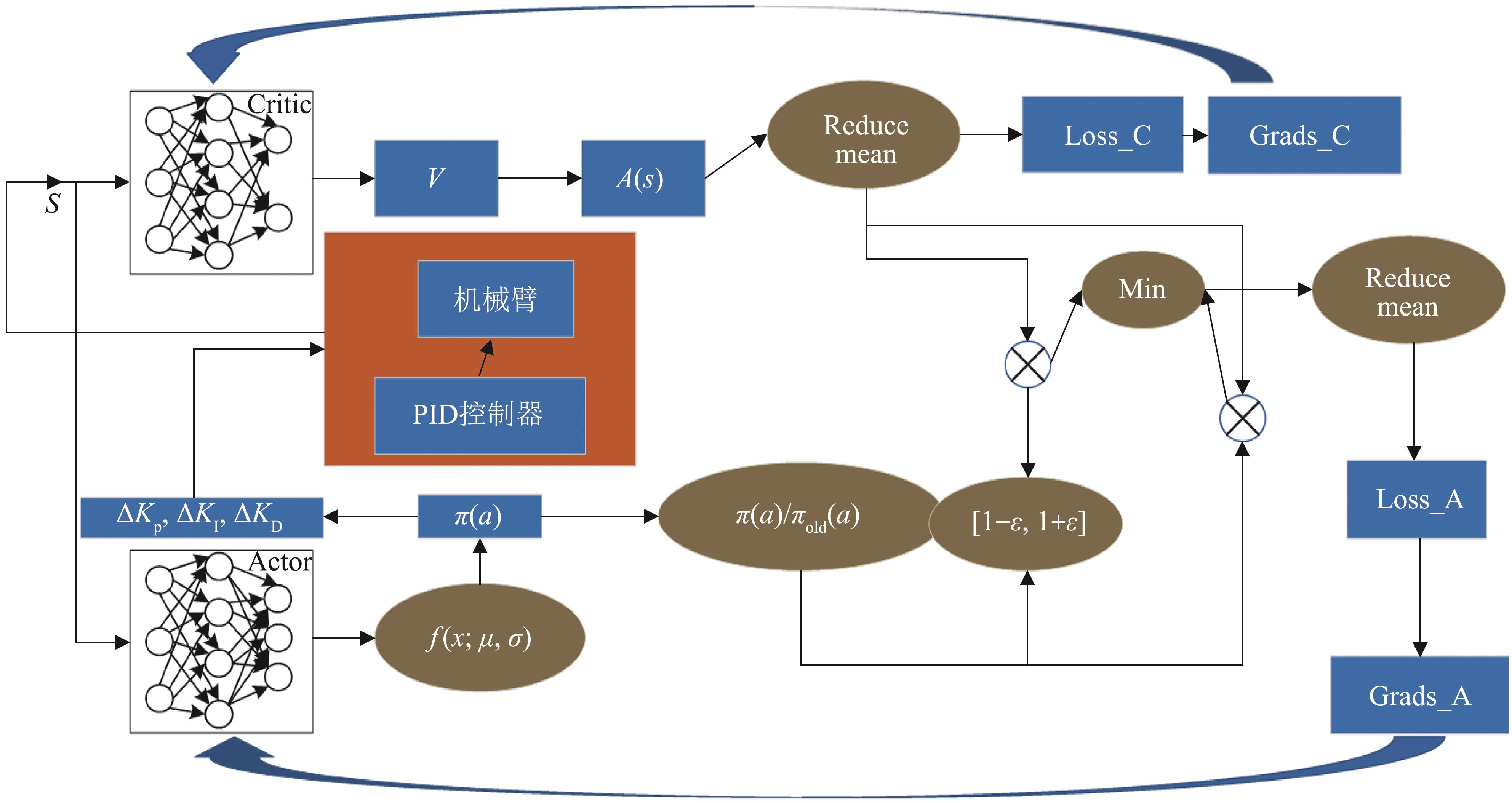
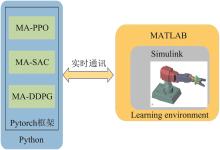
Fig. 9
Overall model diagram
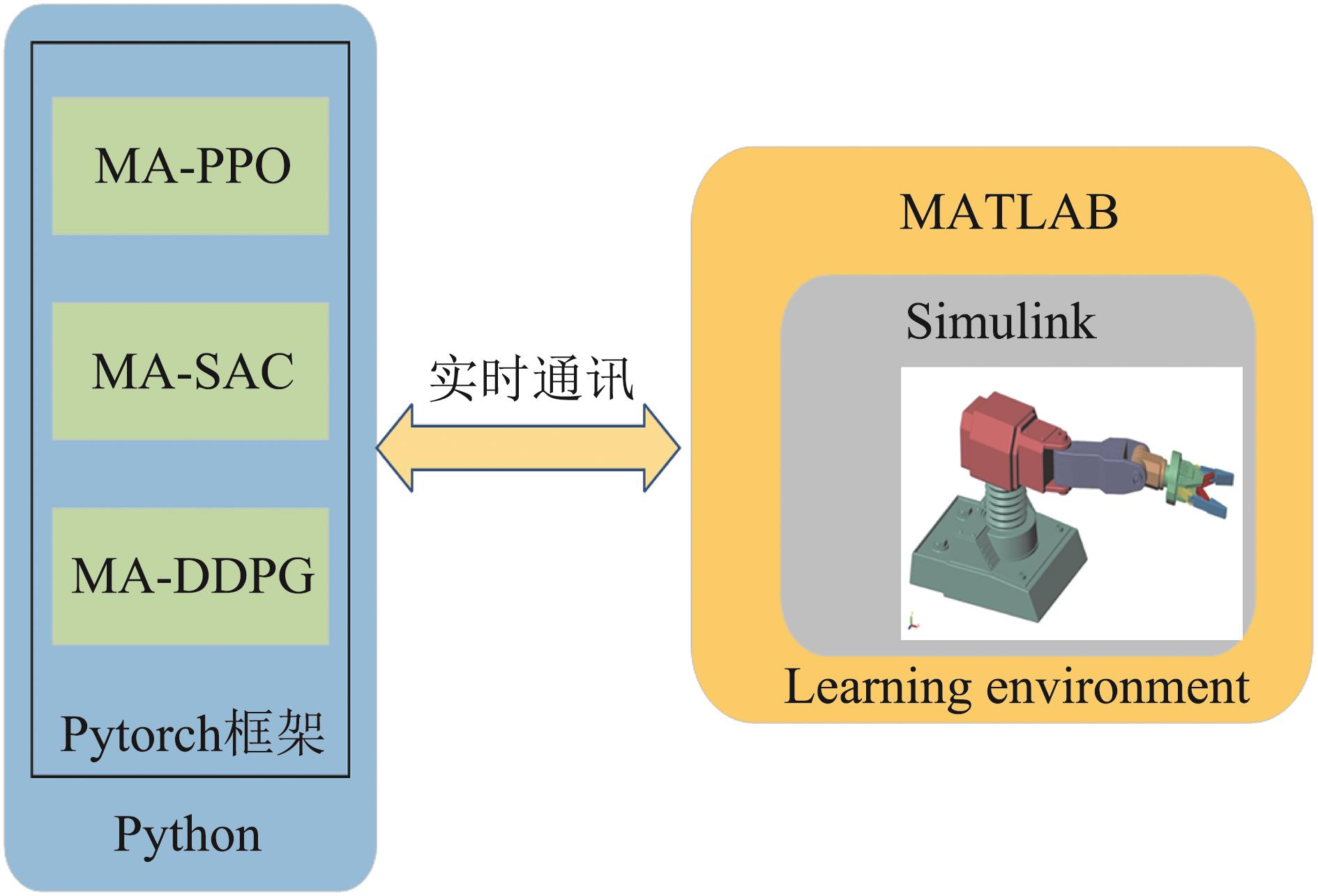
Table 1
Environmental training structure chart training super parameter setting
| 参数名称 | 参数解释 | 参数取值范围 | 本文取值 |
|---|---|---|---|
| epsilon | PPO-clip算用于控制策略更新时新策略和旧策略的差异范围 | 0.1~0.3 | 0.2 |
| learning rate | 神经网络优化器的学习率,用于控制神经网络权重的更新速度 | 0.000 01~0.001 | 0.000 01 |
| batch size | 每个训练步骤中采样的样本数 | 64~512 | 320 |
| buffer_size | 收集的经验数,包含观测、行为与奖励用于后续训练 | 2 048~409 600 | 2 400 |
| clip range | PPO-clip算法中用于控制策略更新步长的截断范围 | 0.1~0.3 | 0.25 |
| Value function coefficient | 价值函数在总损失函数中的权重系数 | 0.5~1.0 | 0.7 |
| entropy coefficien | 策略的熵在总损失函数中的权重系数,用于探索 | 0.001~0.01 | 0.01 |
Fig. 10
Cumulative reward curve
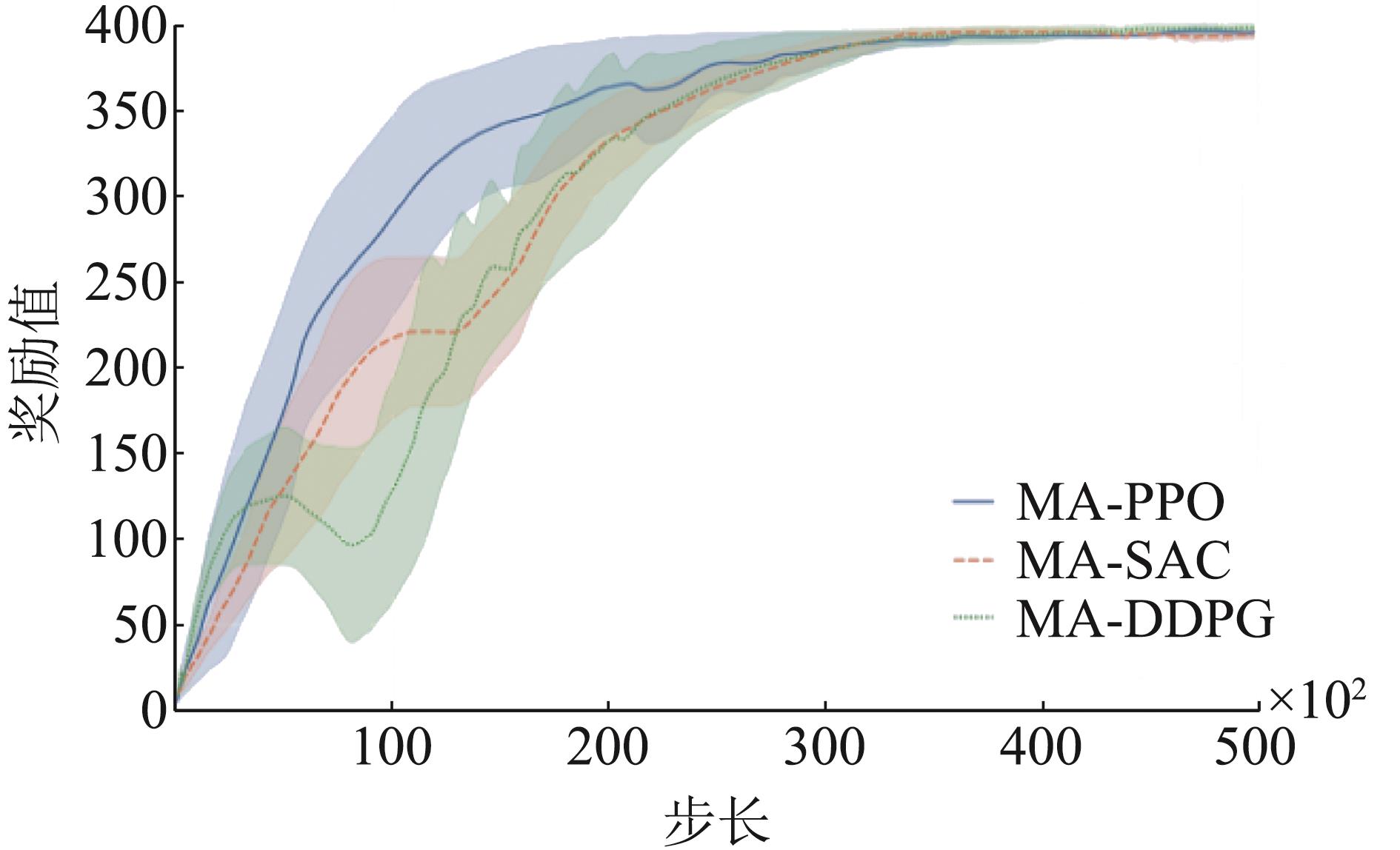
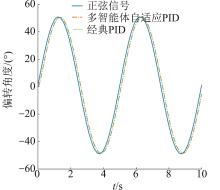
Fig. 11
Sinusoidal signal response curve
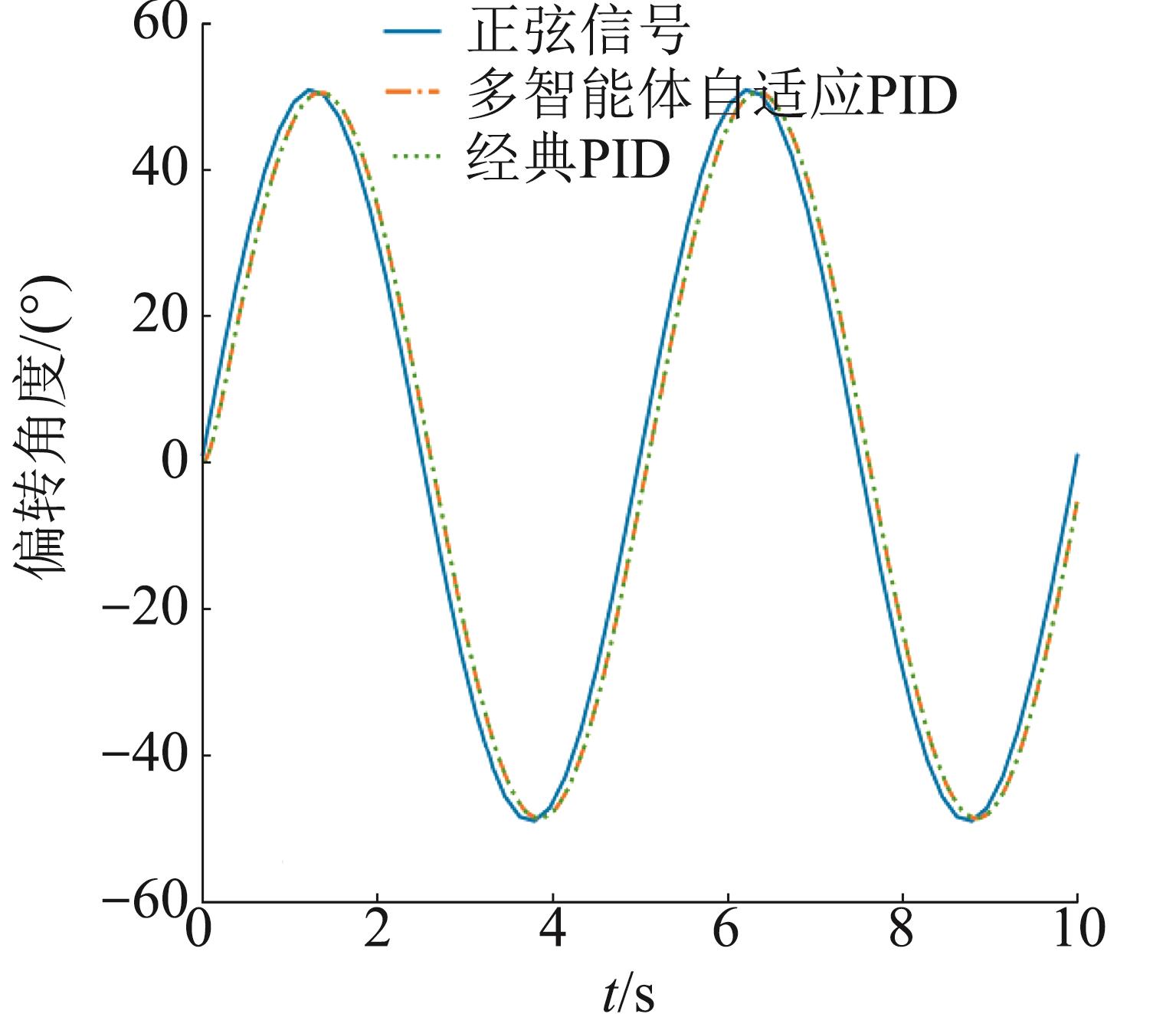
Fig. 12
Pulse signal response curve
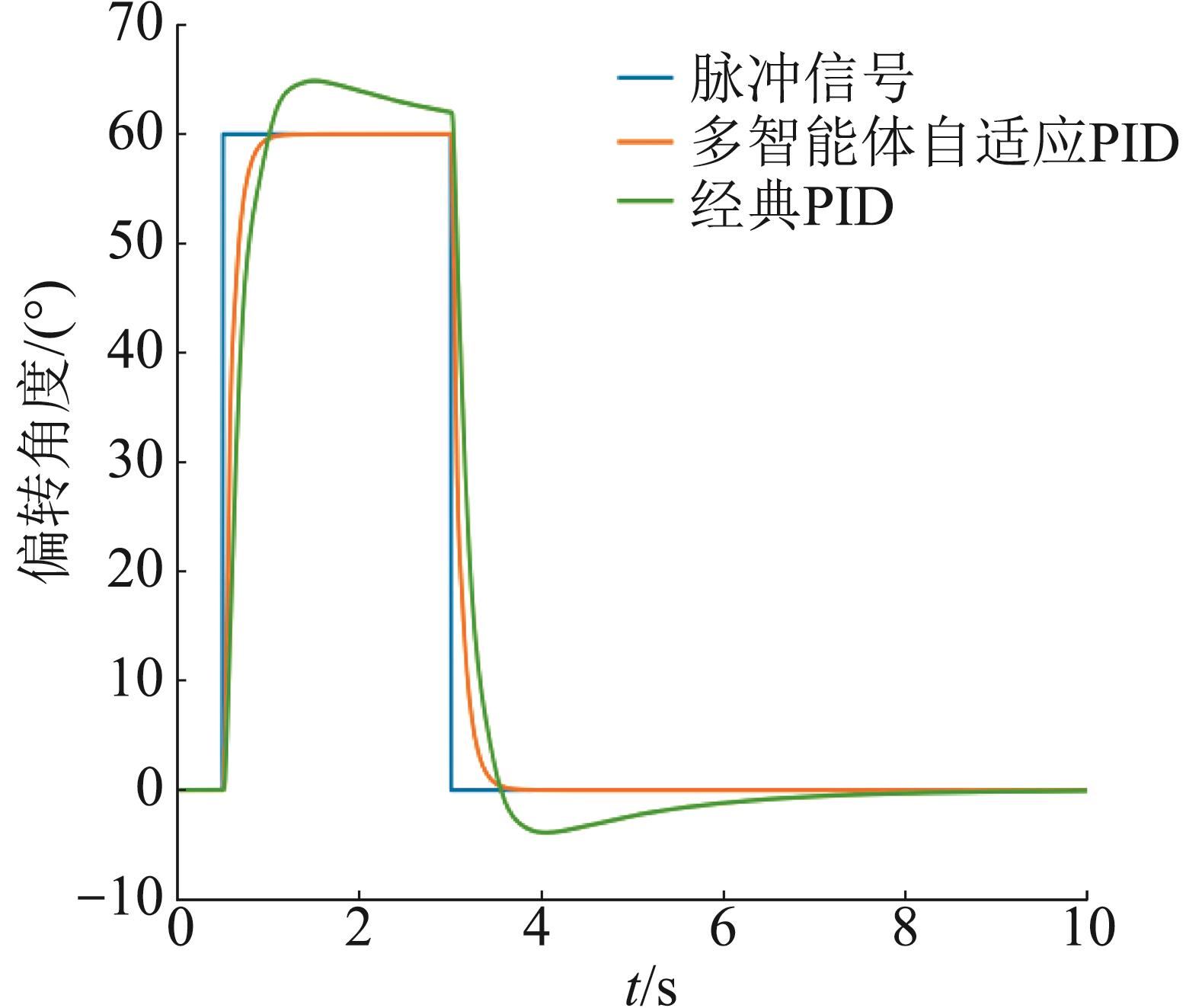
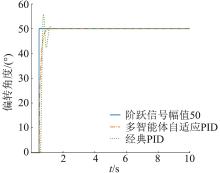
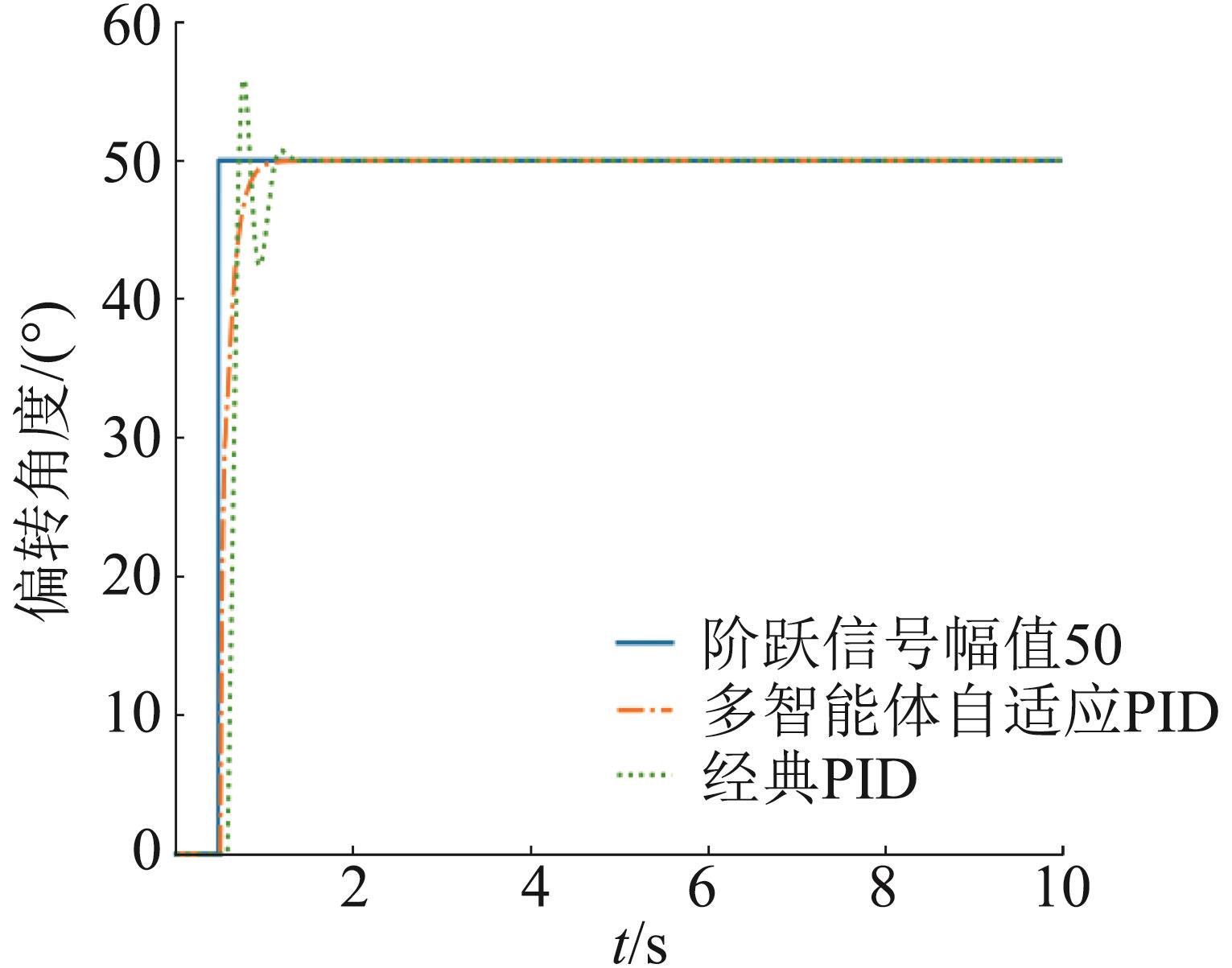
Fig. 13
Step signal response curve
| 1 | 杜宝林, 朱大昌, 盘意华. 机械臂模糊超螺旋二阶滑模轨迹跟踪控制[J]. 系统仿真学报, 2022, 34(6): 1343-1352. |
| Du Baolin, Zhu Dachang, Pan Yihua. Fuzzy Super-twisting Second Order Sliding Mode Trajectory Tracking Control for Robotic Manipulator[J]. Journal of System Simulation, 2022, 34(6): 1343-1352. | |
| 2 | 张瑞民, 陈巧玉. 基于光滑二阶滑模的机械臂轨迹跟踪控制[J]. 系统仿真学报, 2021, 33(6): 1315-1322. |
| Zhang Ruimin, Chen Qiaoyu. Trajectory Tracking Control of Robotic Manipulators Based on Smooth Second-order Sliding Mode[J]. Journal of System Simulation, 2021, 33(6): 1315-1322. | |
| 3 | Wu Jingda, He Hongwen, Peng Jiankun, et al. Continuous Reinforcement Learning of Energy Management with Deep Q Network for a Power Split Hybrid Electric Bus[J]. Applied Energy, 2018, 222: 799-811. |
| 4 | Schulman J, Levine S, Moritz P, et al. Trust Region Policy Optimization[C]//Proceedings of the 32nd International Conference on International Conference on Machine Learning. Chia Laguna Resort, Sardinia, Italy: PMLR, 2015: 1889-1897. |
| 5 | Zhang Yao, Deng Zhongliang, Gao Yuhui. Angle of Arrival Passive Location Algorithm Based on Proximal Policy Optimization[J]. Electronics, 2019, 8(12): 1558. |
| 6 | Haarnoja T, Zhou A, Abbeel P, et al. Soft Actor-critic: Off-policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor[C]//Proceedings of the 35th International Conference on Machine Learning. Chia Laguna Resort, Sardinia, Italy: PMLR, 2018: 3008-3018. |
| 7 | Morales E F, Zaragoza J H. An Introduction to Reinforcement Learning[M]. IEEE, 2011, 11(4): 219-354. |
| 8 | Nguyen Cong Luong, Dinh Thai Hoang, Gong Shimin, et al. Applications of Deep Reinforcement Learning in Communications and Networking: A Survey[J]. IEEE Communications Surveys & Tutorials, 2019, 21(4): 3133-3174. |
| 9 | 李鹤宇, 赵志龙, 顾蕾, 等. 基于深度强化学习的机械臂控制方法[J]. 系统仿真学报, 2019, 31(11): 2452-2457. |
| Li Heyu, Zhao Zhilong, Gu Lei, et al. Robot Arm Control Method Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2019, 31(11): 2452-2457. | |
| 10 | 江达, 蔡志勤, 刘忠振, 等. 基于强化学习的连续型机械臂自适应跟踪控制[J]. 系统仿真学报, 2022, 34(10): 2264-2271. |
| Jiang Da, Cai Zhiqin, Liu Zhongzhen, et al. Reinforcement-learning-based Adaptive Tracking Control for a Space Continuum Robot Based on Reinforcement Learning[J]. Journal of System Simulation, 2022, 34(10): 2264-2271. | |
| 11 | Elsisi Mahmoud, Mahmoud Karar, Lehtonen Matti, et al. An Improved Neural Network Algorithm to Efficiently Track Various Trajectories of Robot Manipulator Arms[J]. IEEE Access, 2021, 9: 11911-11920. |
| 12 | Tran Duc-Thien, Truong Hoai-Vu-Anh, Kyoung Kwan Ahn. Adaptive Nonsingular Fast Terminal Sliding Mode Control of Robotic Manipulator Based Neural Network Approach[J]. International Journal of Precision Engineering and Manufacturing, 2021, 22(3): 417-429. |
| 13 | Yang Shichun, Xie Hehui, Chen Fei, et al. Research on Manipulator Trajectory Tracking Based on Adaptive Fuzzy Sliding Mode Control[C]//2020 Chinese Automation Congress (CAC). Piscataway, NJ, USA: IEEE, 2020: 3086-3091. |
| 14 | Ahmed Saim, Wang Haoping, Tian Yang. Adaptive High-order Terminal Sliding Mode Control Based on Time Delay Estimation for the Robotic Manipulators with Backlash Hysteresis[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 1128-1137. |
| 15 | Ma Yajun, Zhao Hui, Li Tao. Robust Adaptive Dual Layer Sliding Mode Controller: Methodology and Application of Uncertain Robot Manipulator[J]. Transactions of the Institute of Measurement and Control, 2022, 44(4): 848-860. |
| 16 | Mohammadi F, Mohammadi-Ivatloo B, Gharehpetian G B, et al. Robust Control Strategies for Microgrids: A Review[J]. IEEE Systems Journal, 2022, 16(2): 2401-2412. |
| 17 | Konar Amit, Indrani Goswami Chakraborty, Sapam Jitu Singh, et al. A Deterministic Improved Q-learning for Path Planning of a Mobile Robot[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2013, 43(5): 1141-1153. |
| 18 | Zhou Changjiu, Meng Qingchun. Dynamic Balance of a Biped Robot Using Fuzzy Reinforcement Learning Agents[J]. Fuzzy Sets and Systems, 2003, 134(1): 169-187. |
| 19 | Wu Hui, Song Shiji, You Keyou, et al. Depth Control of Model-free AUVs via Reinforcement Learning[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(12): 2499-2510. |
| 20 | 魏楠哲. 空间机械臂柔性关节高精度控制研究[D]. 北京: 北京邮电大学, 2016. |
| Wei Nanzhe. Study on Flexible Joint Control System with High Precision for Space Manipulator[D]. Beijing: Beijing University of Posts and Telecommunications, 2016. | |
| 21 | Schulman J, Wolski F, Dhariwal P, et al. Proximal Policy Optimization Algorithms[EB/OL]. (2017-08-28) [2023-01-12]. . |
| [1] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [2] | Qin Long, Huang Hesong, Yin Lujia, Ai Chuan, Zhang Qi, Li Xinmeng. Intelligent Competition Platform and Mode Driven by Cloud-native Simulation [J]. Journal of System Simulation, 2026, 38(4): 988-1003. |
| [3] | Li Jiting, Sun Yi, Wang Yirong, Lin Yiqin, Jia Jun, Ding Gangsong. LLM-driven Multi-agent Social Network Simulation: Interdisciplinary Integration and Cutting-edge Development [J]. Journal of System Simulation, 2026, 38(2): 235-260. |
| [4] | Wu Shuxia, Zhang Junjie, Chen Delong, Chen Zheyi. Resource-efficient Continuous Learning Framework for Edge Real-time Video Analytics [J]. Journal of System Simulation, 2026, 38(2): 294-306. |
| [5] | Zhang Ziyao, Ji Yunfeng. Simulation of Robotic Arm Ball-catching Strategy Based on Curriculum RL of Transformer [J]. Journal of System Simulation, 2026, 38(2): 321-331. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Liu Quan, Wang Yu, Liu Linyue, Chen Hao, Huang Jian. Knowledge Closed-loop Driving-based Intelligent Game Confrontation Simulation [J]. Journal of System Simulation, 2026, 38(2): 416-432. |
| [8] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [9] | Wang Yifan, Yang Bin, Wang Congjun. Simulation Method for Multi-crew Construction Processes Based on Large Language Model-powered Agent [J]. Journal of System Simulation, 2026, 38(2): 488-500. |
| [10] | Xu Risheng, Yang Linyao, Qin Yuanqi, Wang Xiao, Sun Changyin. Knowledge-enhanced LLM-based Method for Regional Traffic Signal Control [J]. Journal of System Simulation, 2026, 38(2): 518-531. |
| [11] | Zhu Yuning, Yang Meng, Chen Tianyue, Meng Weiliang. VRBT: VR Badminton Training with Multitask Injury Alerts based on Lightweight 3D Skeletal Reconstruction [J]. Journal of System Simulation, 2026, 38(1): 225-234. |
| [12] | Zhang Wei, Sheng Wei, Cao Yidan, Zhao Tingsheng. Research on 3D Visualization of Safety Monitoring and Early Warning for Steel Continuous Casting Scenarios [J]. Journal of System Simulation, 2025, 37(8): 1991-2003. |
| [13] | Xie Yong, Gao Hailong, Chen Yutao, Wang Huanjiang. Optimization of Product Oil Distribution with Multiple Trips and Multiple Due Dates under Dynamic Demand [J]. Journal of System Simulation, 2025, 37(8): 2016-2029. |
| [14] | Chen Tao, Liu Jianxuan, Wang Lizhong, Zou Xiangjun, Li Xiaojuan. Research on Non-singular Fast Integral Terminal Sliding Mode Trajectory Tracking Control of Six-axis Robotic Arm [J]. Journal of System Simulation, 2025, 37(8): 2115-2123. |
| [15] | Zhang Yue, Zhang Wenliang, Feng Qiang, Guo Xing, Ren Yi, Wang Zili. Combat-oriented Comprehensive Simulation and Verification Technology for Equipment System RMS [J]. Journal of System Simulation, 2025, 37(7): 1823-1835. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
