

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (12): 2971-2983.doi: 10.16182/j.issn1004731x.joss.23-1233
• Papers • Previous Articles Next Articles
Miao Tianyue, Wang Lu, He Jiaxiao, Xie Nenggang
Received:2023-10-12
Revised:2023-11-12
Online:2024-12-20
Published:2024-12-20
Contact:
Wang Lu
CLC Number:
Miao Tianyue, Wang Lu, He Jiaxiao, Xie Nenggang. Research on Digital Twin Simulation Method of Industrial Robot Integrated with Reinforcement Learning[J]. Journal of System Simulation, 2024, 36(12): 2971-2983.

Fig. 1
Overall architecture of system
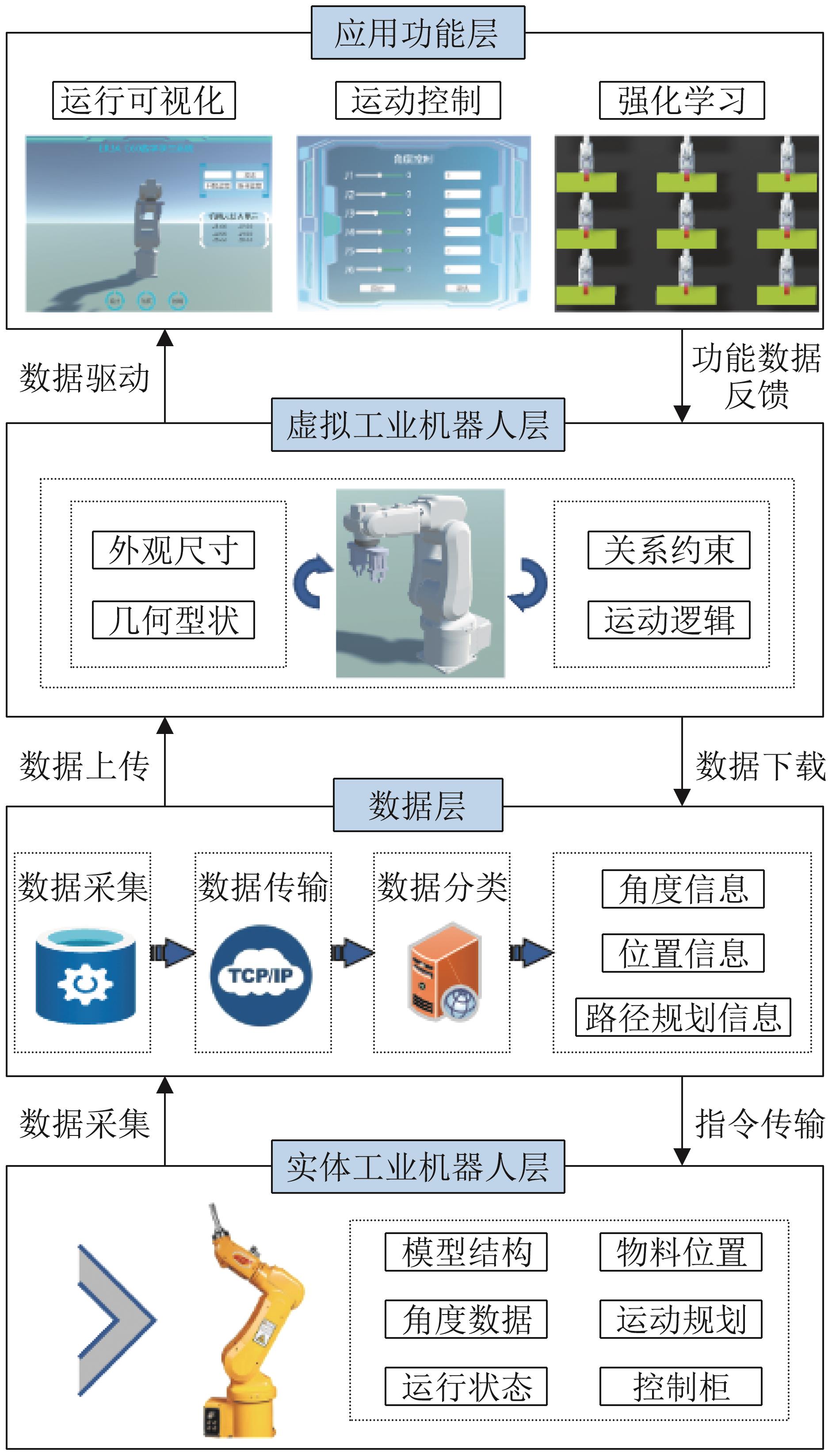
Fig. 2
System hierarchy and development process
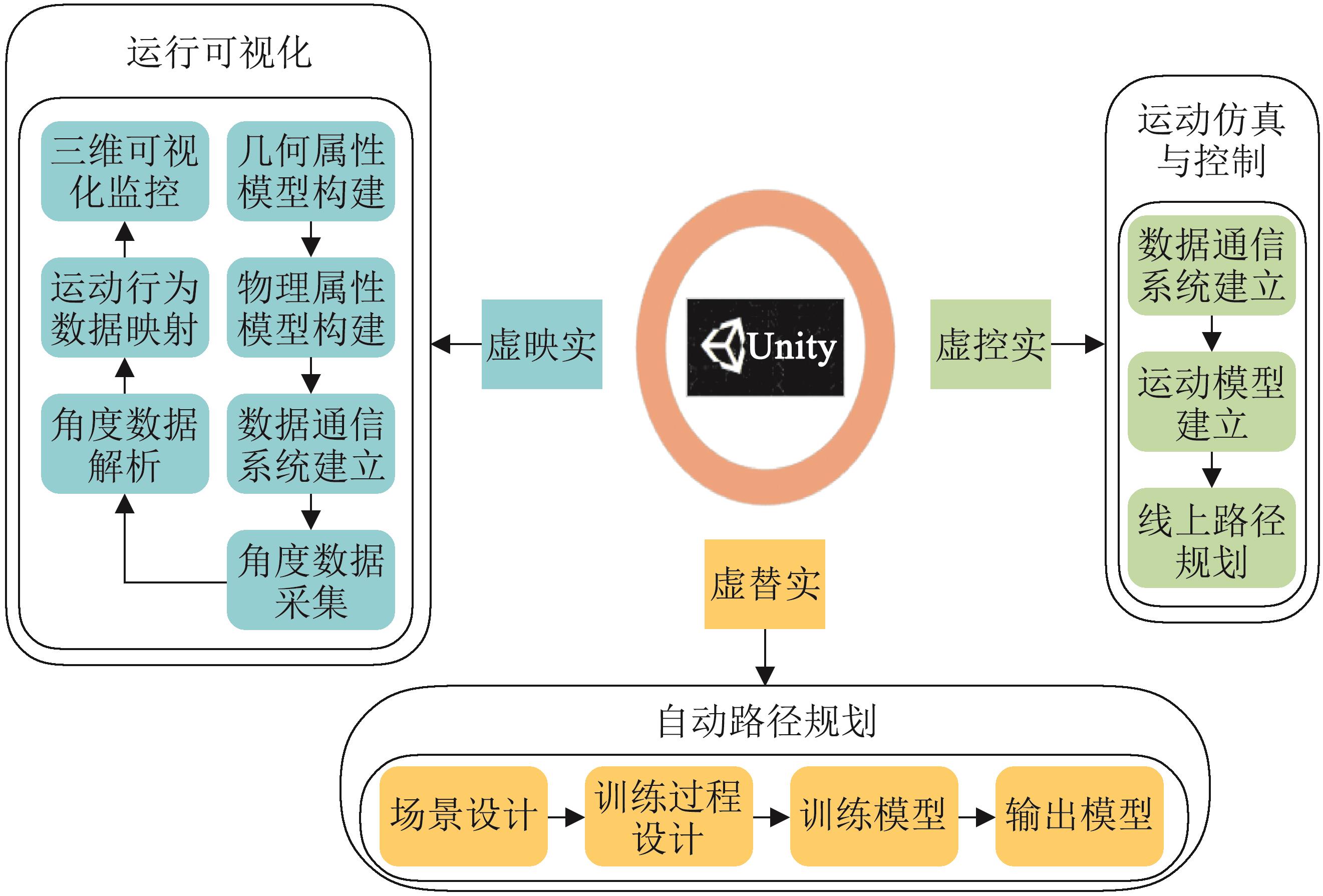

Fig. 3
Pixyz Studio processing
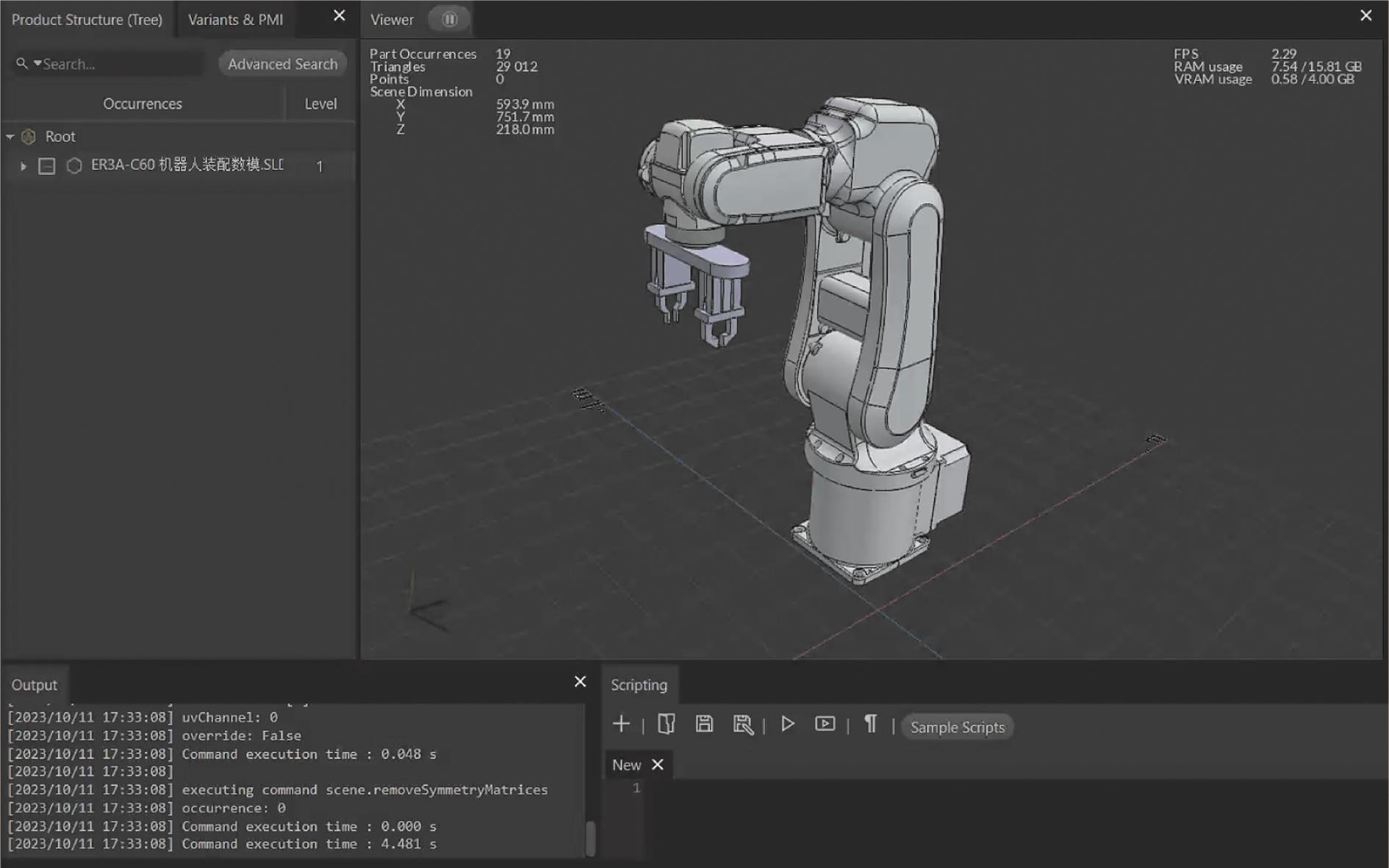
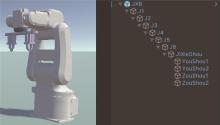
Fig. 4
Unity rendering
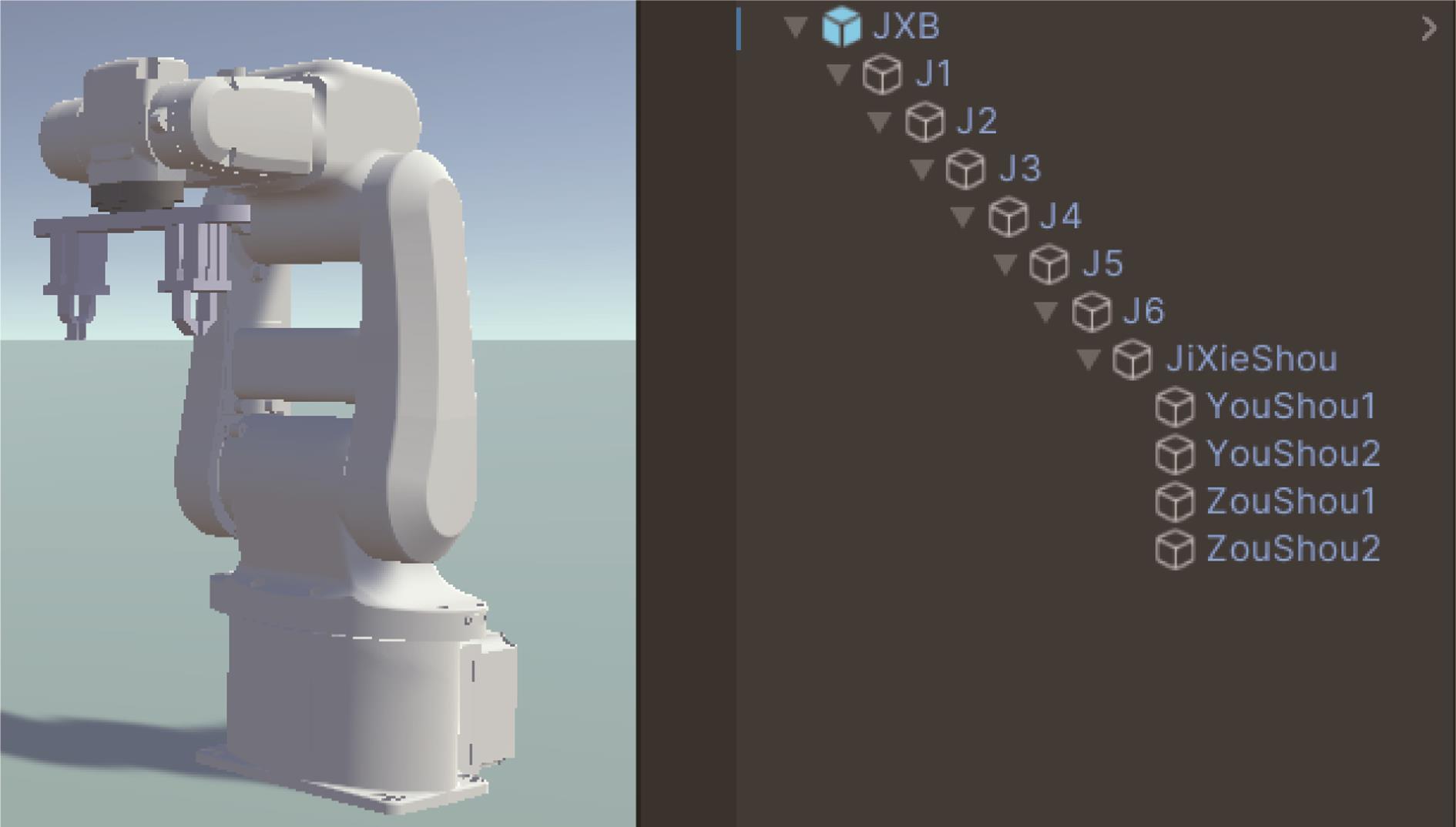

Fig. 5
Data communication system architecture
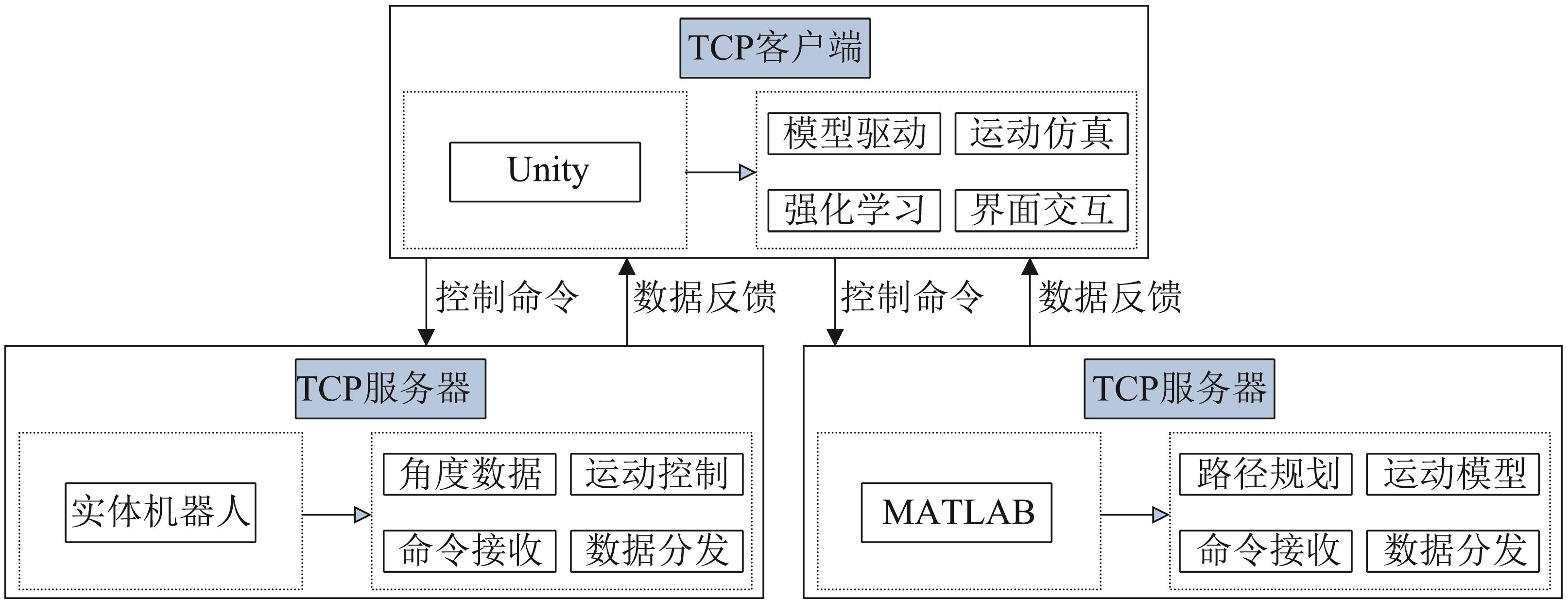
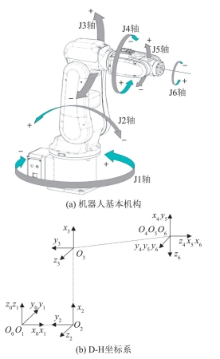
Fig. 6
Basic structure of robot and D?H coordinate system
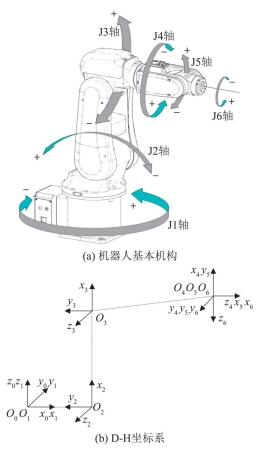
Table 1
D-H parameters of robot
| 1 | 321.5 | 0 | 0 | |
| 2 | 0 | 50 | 90 | |
| 3 | 0 | 270 | 0 | |
| 4 | 299 | 70 | 90 | |
| 5 | 0 | 0 | –90 | |
| 6 | 0 | 0 | 90 |

Fig. 7
Training framework
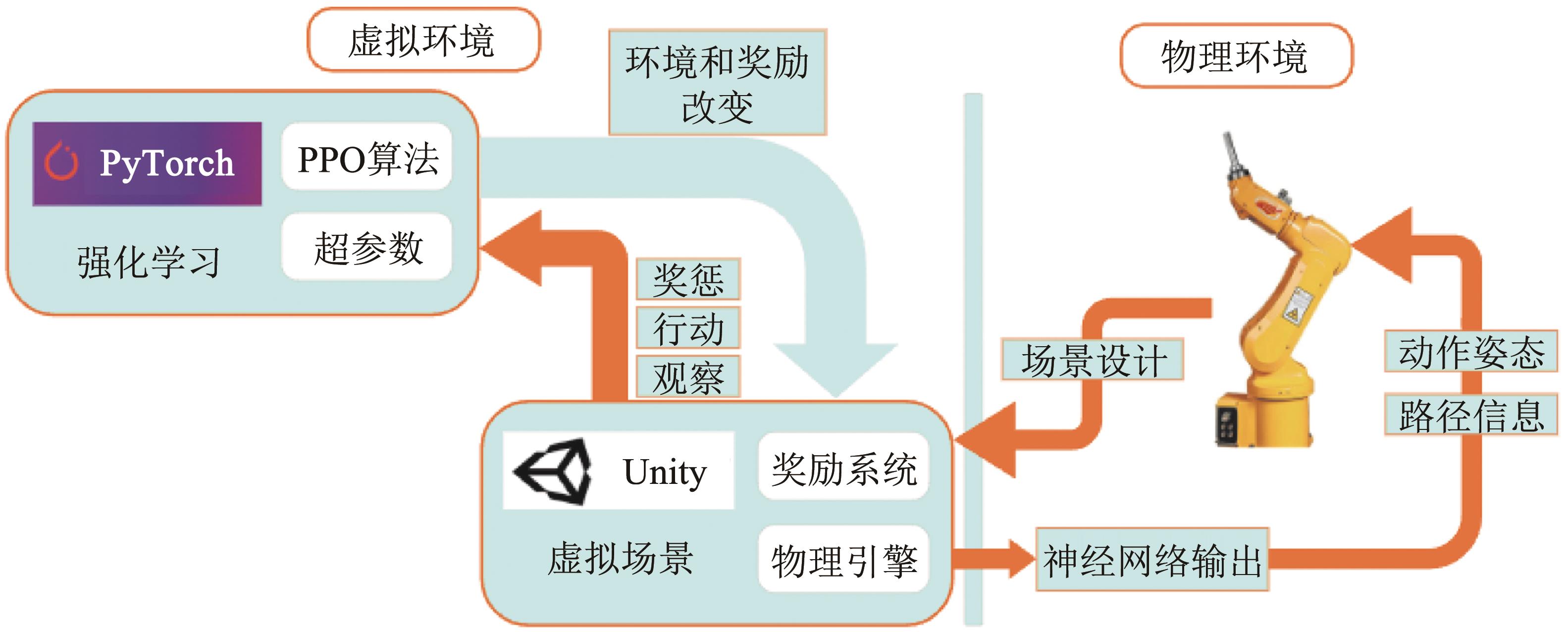
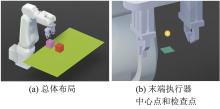
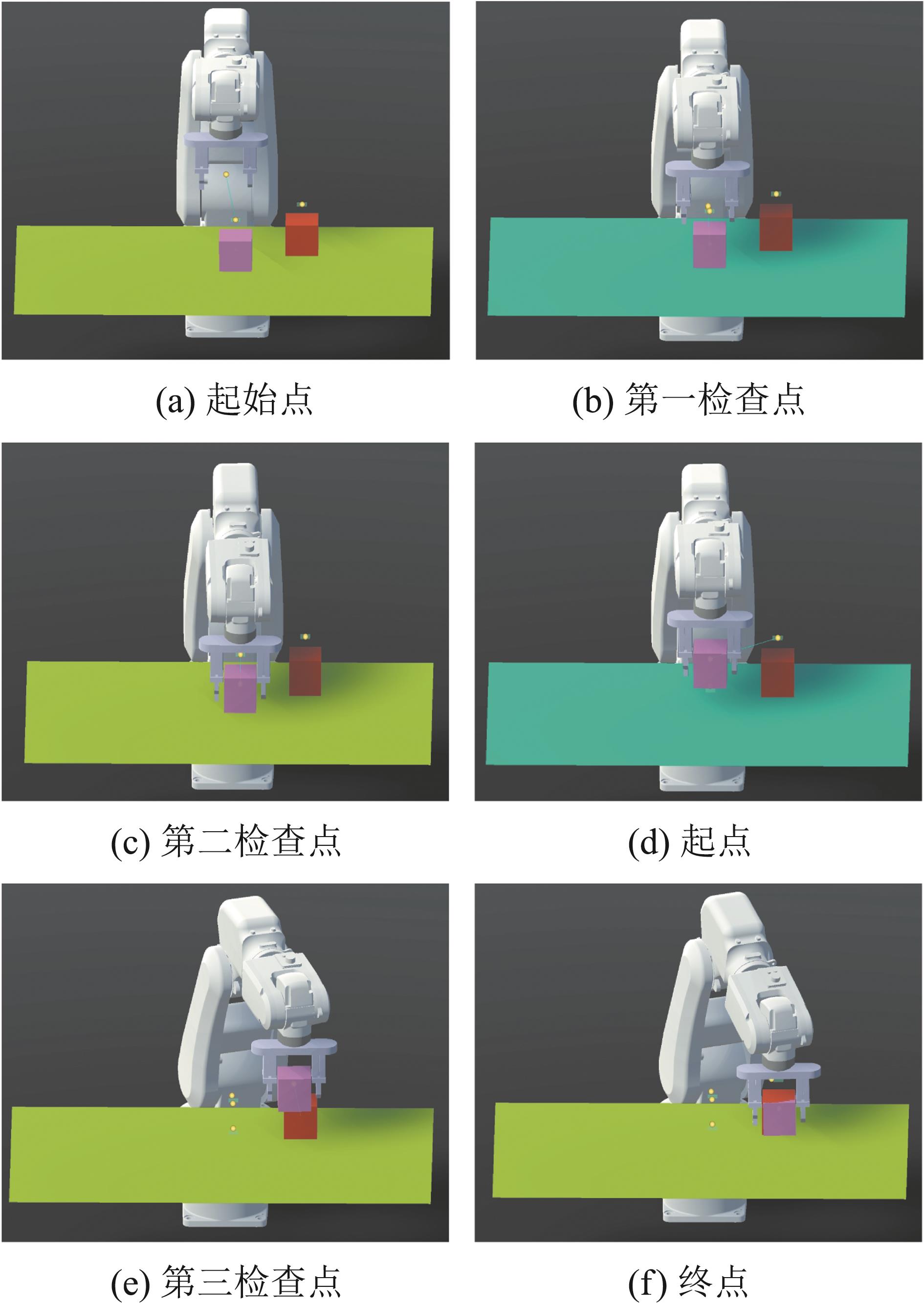
Fig. 8
Scene settings
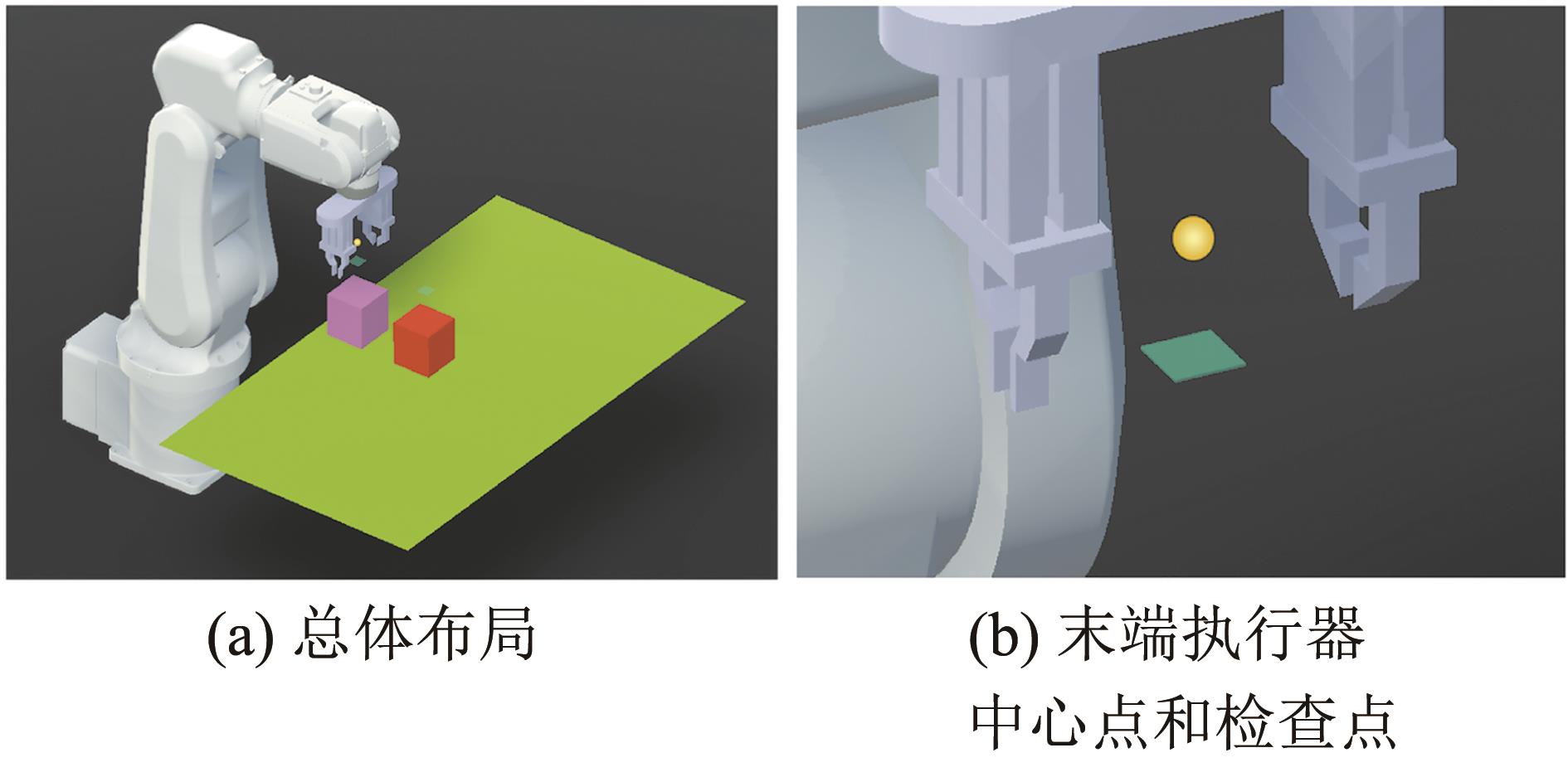
Table 2
Awards and descriptions
| 奖励 | 说明 |
|---|---|
| 0.5×forward | forward代表末端执行器中心点速度方向的单位向量和中心点到目标方向的单位向量的点积,代表了中心点朝目标方向移动的匹配度 |
| -0.5 | 末端执行器不按照前后顺序通过检查点 |
| -1 | 末端执行器中心点触碰到平台 |
| 0.6×direction_up | direction_up代表执行器x轴与平台x轴的点积 |
| 0.6×direction_right | direction_right代表执行器z轴与平台z轴的点积 |
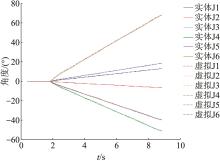
Fig. 9
Angle data of physical and virtual robots
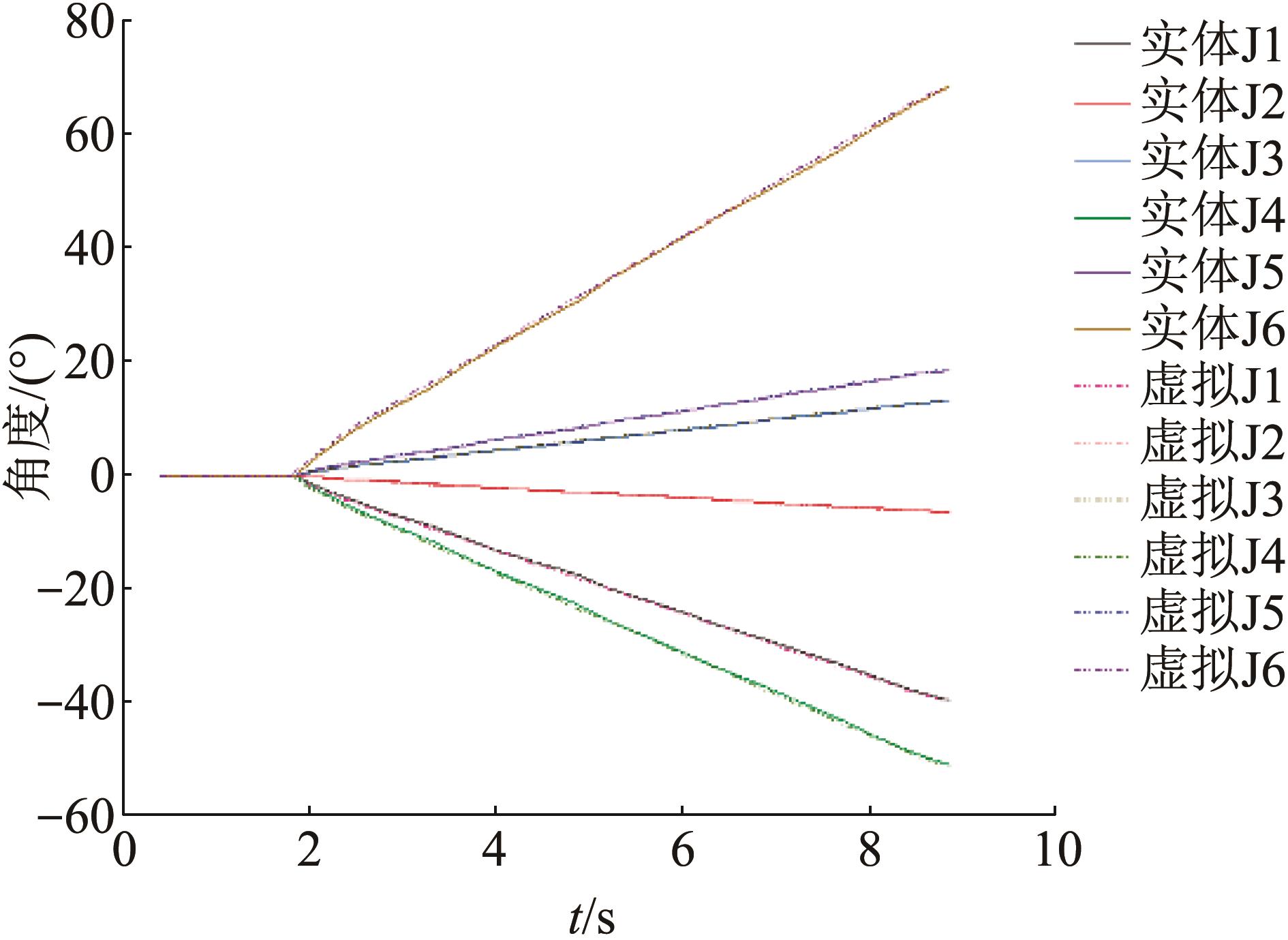
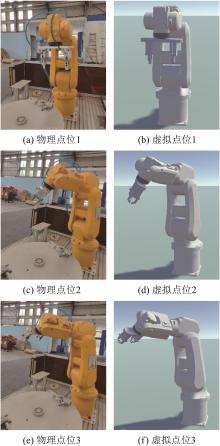
Fig. 10
Movement posture of physical and virtual robots
Fig. 11
Waypoint settings

Fig. 12
Planned and actual running path
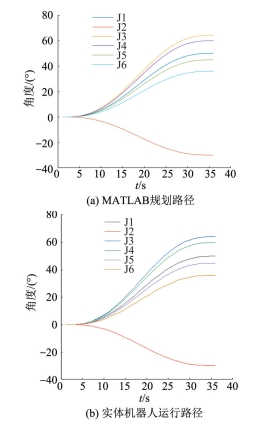
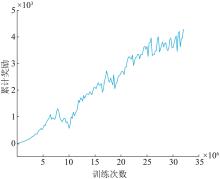
Fig. 13
Cumulative reward changes
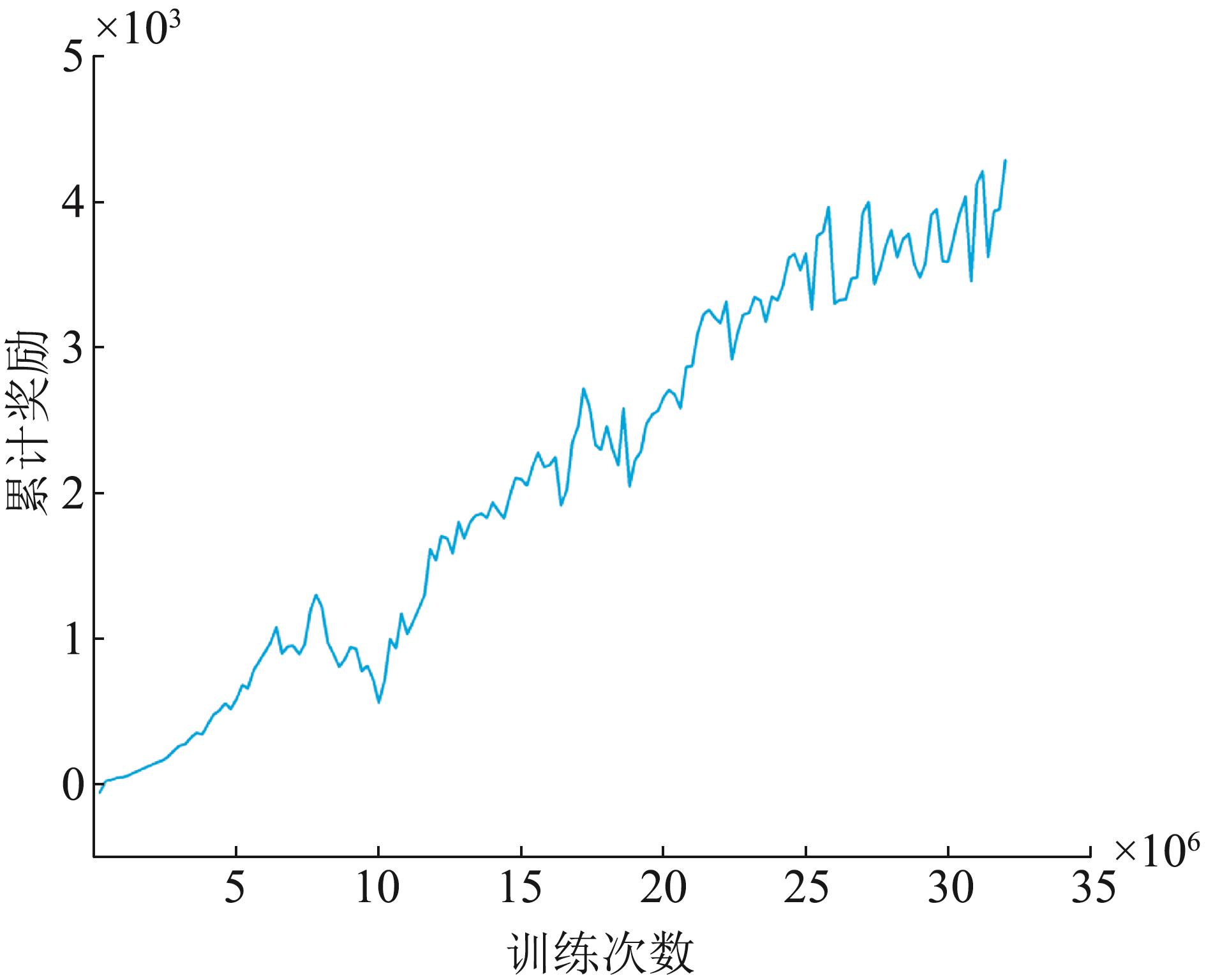
Fig. 14
Results of model operation
| 1 | Bajic Bojana, Rikalovic Aleksandar, Suzic Nikola, et al. Industry 4.0 Implementation Challenges and Opportunities: A Managerial Perspective[J]. IEEE Systems Journal, 2021, 15(1): 546-559. |
| 2 | 徐健, 刘高峰, 赵一剑, 等. 装配机器人的数字孪生虚实同步及抓取方法[J/OL]. 系统仿真学报. (2023-09-15) [2023-09-20]. . |
| Xu Jian, Liu Gaofeng, Zhao Yijian, et al. Virtual and Real Synchronization and Grasping Method of Digital Twin for Assembly Robot[J/OL]. Journal of System Simulation. (2023-09-15) [2023-09-20]. . | |
| 3 | 张霖, 陆涵. 从建模仿真看数字孪生[J]. 系统仿真学报, 2021, 33(5): 995-1007. |
| Zhang Lin, Lu Han. Discussing Digital Twin from of Modeling and Simulation[J]. Journal of System Simulation, 2021, 33(5): 995-1007. | |
| 4 | 张冰, 李欣, 万欣欣. 从数字孪生到数字工程建模仿真迈入新时代[J]. 系统仿真学报, 2019, 31(3): 369-376. |
| Zhang Bing, Li Xin, Wan Xinxin. From Digital Twin to Digital Engineering Modeling and Simulation Entering a New Era[J]. Journal of System Simulation, 2019, 31(3): 369-376. | |
| 5 | 赵浩然, 刘检华, 熊辉, 等. 面向数字孪生车间的三维可视化实时监控方法[J]. 计算机集成制造系统, 2019, 25(6): 1432-1443. |
| Zhao Haoran, Liu Jianhua, Xiong Hui, et al. 3D Visualization Real-time Monitoring Method for Digital Twin Workshop[J]. Computer Integrated Manufacturing Systems, 2019, 25(6): 1432-1443. | |
| 6 | 王栎淇, 范维, 陈传军, 等. 基于实时数据驱动的车间输送线数字孪生系统研究与实现[J]. 制造业自动化, 2023, 45(8): 171-177. |
| Wang Liqi, Fan Wei, Chen Chuanjun, et al. Research and Implementation of Digital Twin System of Workshop Conveyor Line Based on Real-time Data[J]. Manufacturing Automation, 2023, 45(8): 171-177. | |
| 7 | 杜莹莹, 罗映, 彭义兵, 等. 基于数字孪生的工业机器人三维可视化监控[J]. 计算机集成制造系统, 2023, 29(6): 2130-2138. |
| Du Yingying, Luo Ying, Peng Yibing, et al. 3D Visual Monitoring System of Industrial Robot Based on Digital Twin[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 2130-2138. | |
| 8 | 陈玉娇, 曾诗雨, 和红杰, 等. 工业机器人码垛数字孪生系统的研究与实现[J]. 计算机集成制造系统, 2023, 29(6): 1930-1940. |
| Chen Yujiao, Zeng Shiyu, He Hongjie, et al. Research and Implementation of Digital Twin System for Industrial Robot Palletizing[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 1930-1940. | |
| 9 | 魏新宇, 李玮, 郭志伟, 等. 炭块表面清理数字孪生机器人及其运动控制[J]. 计算机集成制造系统, 2023, 29(6): 1950-1964. |
| Wei Xinyu, Li Wei, Guo Zhiwei, et al. Digital Twin Robot and Its Motion Control for Surface Cleaning of Carbon Block[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 1950-1964. | |
| 10 | Garg Gaurav, Kuts Vladimir, Anbarjafari Gholamreza. Digital Twin for FANUC Robots: Industrial Robot Programming and Simulation Using Virtual Reality[J]. Sustainability, 2021, 13(18): 10336. |
| 11 | 陶飞, 张辰源, 戚庆林, 等. 数字孪生成熟度模型[J]. 计算机集成制造系统, 2022, 28(5): 1267-1281. |
| Tao Fei, Zhang Chenyuan, Qi Qinglin, et al. Digital Twin Maturity Model[J]. Computer Integrated Manufacturing Systems, 2022, 28(5): 1267-1281. | |
| 12 | 阴艳超, 冯嘉胜, 易斌, 等. 面向流程制造的数字孪生车间可视化监控系统研究[J]. 系统仿真学报, 2024, 36(1): 120-130. |
| Yin Yanchao, Feng Jiasheng, Yi Bin, et al. Visual Monitoring System of Digital Twin Workshop for Process Manufacturing[J]. Journal of System Simulation, 2024, 36(1): 120-130. | |
| 13 | 刘贝贝, 袁亮, 孔庆博, 等. 6自由度工业机器人运动轨迹优化方法研究[J]. 组合机床与自动化加工技术, 2020(2): 11-15. |
| Liu Beibei, Yuan Liang, Kong Qingbo, et al. Research on Motion Trajectory Optimization Method of 6-DOF Industrial Robot[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2020(2): 11-15. | |
| 14 | Craig J J. 机器人学导论[M]. 贠超, 译. 北京: 机械工业出版社, 2006: 1-94. |
| Craig J J. Introduction to Robotics Mechanics and Control[M]. Translated by Yun Chao. Beijing: China Machine Press, 2006: 1-94. | |
| 15 | Liu Chuzhao, Gao Junyao, Bi Yuanzhen, et al. A Multitasking-oriented Robot Arm Motion Planning Scheme Based on Deep Reinforcement Learning and Twin Synchro-control[J]. Sensors, 2020, 20(12): 3515. |
| 16 | Xie Jiexin, Shao Zhenzhou, Li Yue, et al. Deep Reinforcement Learning with Optimized Reward Functions for Robotic Trajectory Planning[J]. IEEE Access, 2019, 7: 105669-105679. |
| 17 | 马天, 席润韬, 吕佳豪, 等. 基于深度强化学习的移动机器人三维路径规划方法[J]. 计算机应用, 2024, 44(7): 2055-2064. |
| Ma Tian, Xi Runtao, Jiahao Lü, et al. Mobile Robot 3D Space Path Planning Method Based on Deep Reinforcement Learning[J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [1] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [2] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [3] | Nan Yandong, Zhu Jinda, Lu Xinbin, Qin Zhiying, Qi Dandan, Ding Zhiheng. State Monitoring of Nuclear Power Connection Sleeve Quality Inspection Equipment Driven by Digital Twin [J]. Journal of System Simulation, 2026, 38(4): 1004-1017. |
| [4] | Yan Dong, Yang Hanzhe, Jiang Fangfang, Liu Chengbao, Zhang Peng. Design and Application of Collaborative Simulation System for Satellite Constellation Flight Missions [J]. Journal of System Simulation, 2026, 38(4): 1067-1079. |
| [5] | Li Guozheng, Wang Rui, Fan Shichao, Cai Xintong, Zhai Xinyue. Review on Optimization of Simulation Modeling Strategies for Spacecraft Orbit Avoidance [J]. Journal of System Simulation, 2026, 38(4): 855-868. |
| [6] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [7] | Wang Ziying, Sun Congjun, Li Guihu, Zhang Tianhao. Virtual Train Operation Platform Based on Digital Twin [J]. Journal of System Simulation, 2026, 38(3): 736-745. |
| [8] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [9] | Zheng Wei, Tang Jiahao, Xiong Xiaoping, Fan Xin. Intelligent Decision-making Method in Imbalanced Air Combat Based on Asymmetric Self-play [J]. Journal of System Simulation, 2026, 38(2): 433-446. |
| [10] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [11] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [12] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [13] | Lu Houjun, Zhu Yifei, Rong Yanping, Zhang Wanghui. Digital Twin Modeling Method for Bulk Cargo Stacks Based on 2D LiDAR [J]. Journal of System Simulation, 2025, 37(9): 2269-2286. |
| [14] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [15] | Liu Yongkui, Yang Kang, Tuo Benben, Pan Yaduo, Wang Xinyu, Wang Yihan, Gong Yongqian, Zhang Lin, Wang Lihui, Lin Tingyu, Zi Bin, Li Yuan, You Wei, Xu Xun. Digital Twinned Industrial Robot: Conceptual Framework, Key Technologies, and Case Study [J]. Journal of System Simulation, 2025, 37(7): 1723-1752. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
