

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (3): 691-703.doi: 10.16182/j.issn1004731x.joss.23-1334
• Papers • Previous Articles Next Articles
Li Ruoqing1, Zhao Yaochi1, Hu Zhuhua1, Qi Wenlu2, Liu Guangfeng1
Received:2023-11-07
Revised:2023-12-09
Online:2025-03-17
Published:2025-03-21
Contact:
Zhao Yaochi
CLC Number:
Li Ruoqing, Zhao Yaochi, Hu Zhuhua, Qi Wenlu, Liu Guangfeng. TOHF: A Feature Extractor for Resource-constrained Indoor VSLAM[J]. Journal of System Simulation, 2025, 37(3): 691-703.
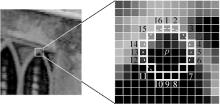
Fig. 1
FAST feature point
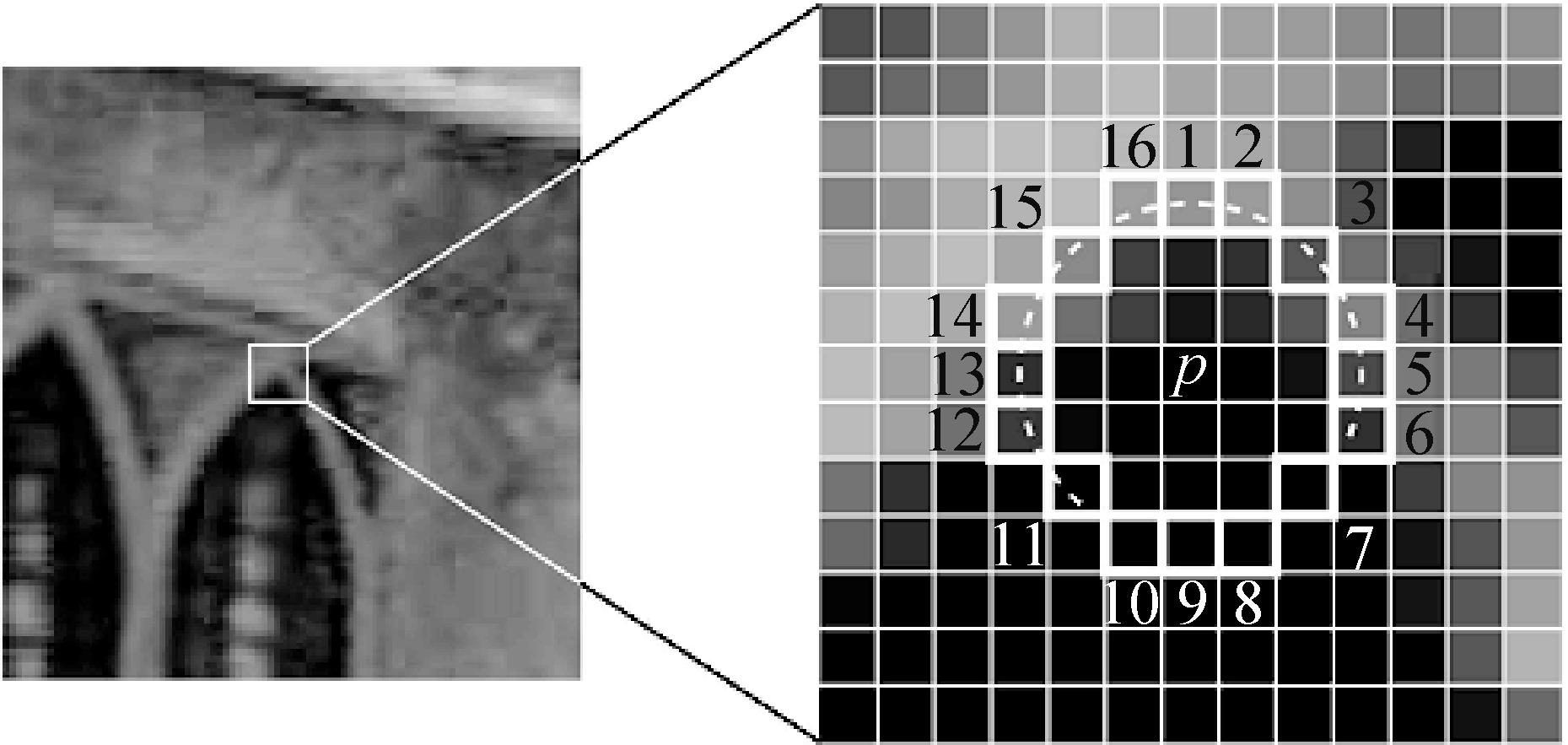

Fig. 2
Quadtree partition
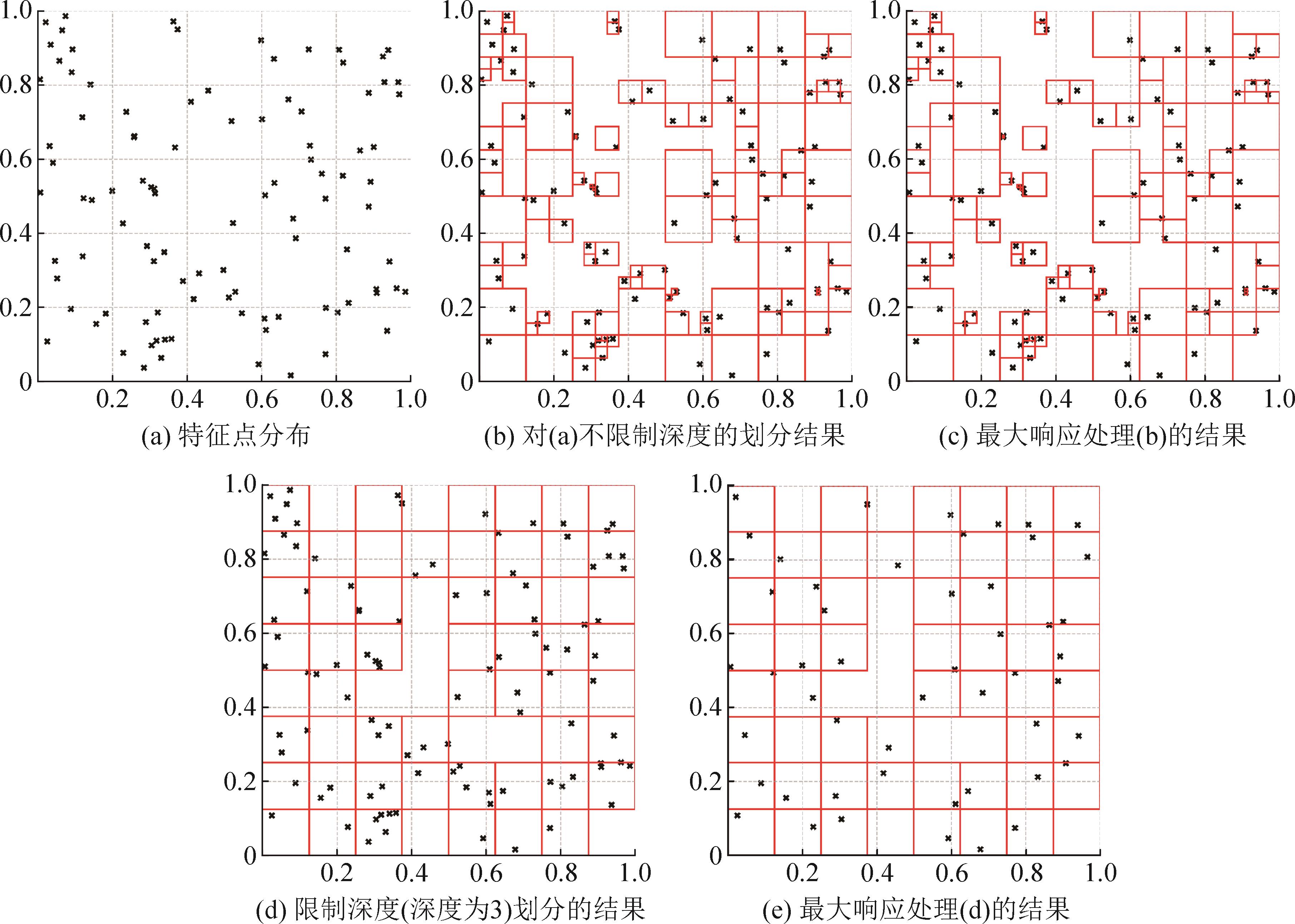

Fig. 3
Structure of TOHF feature extractor

Fig. 4
Statistical results of contrast and entropy
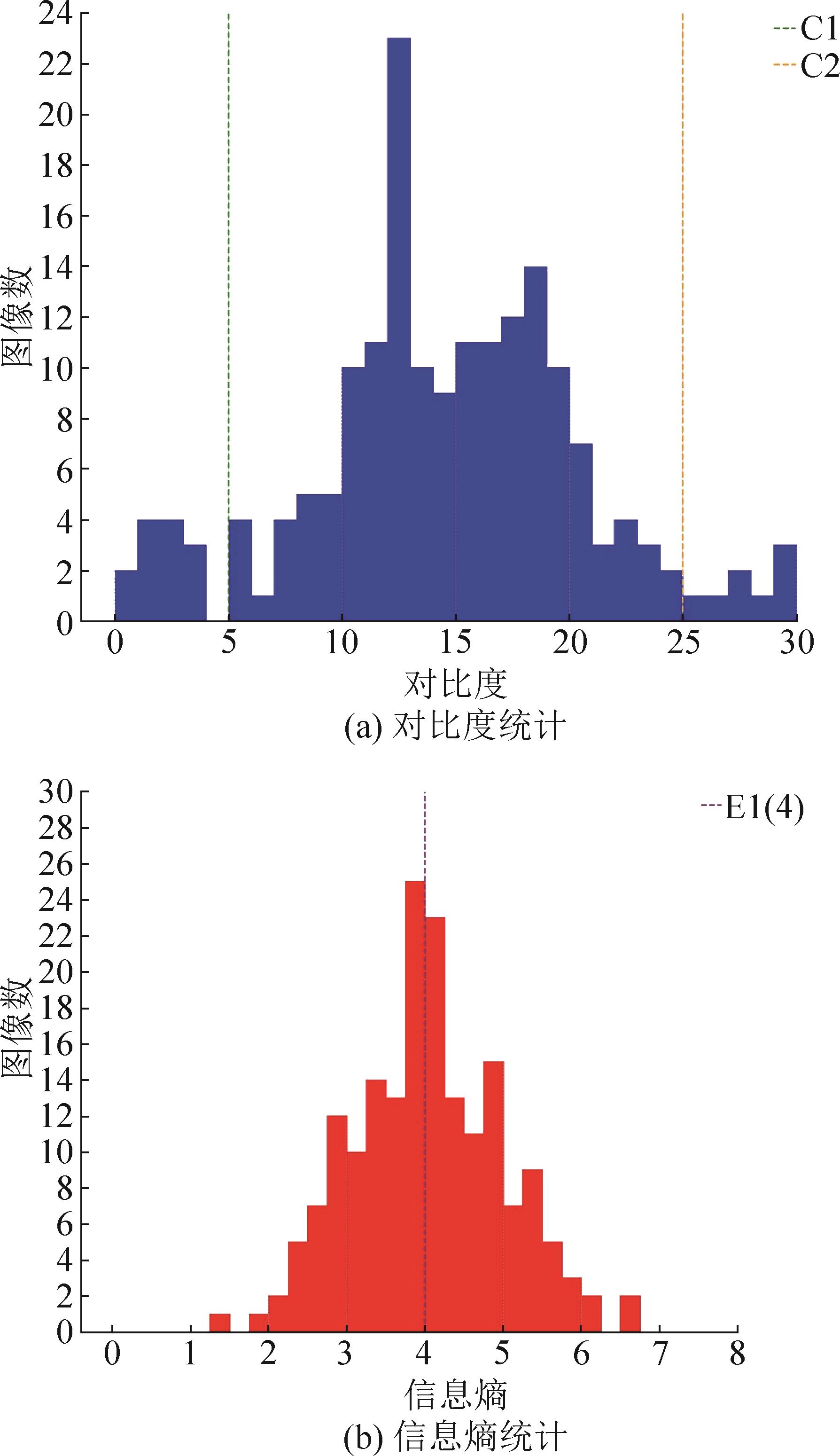
Fig. 5
Experimental scenes
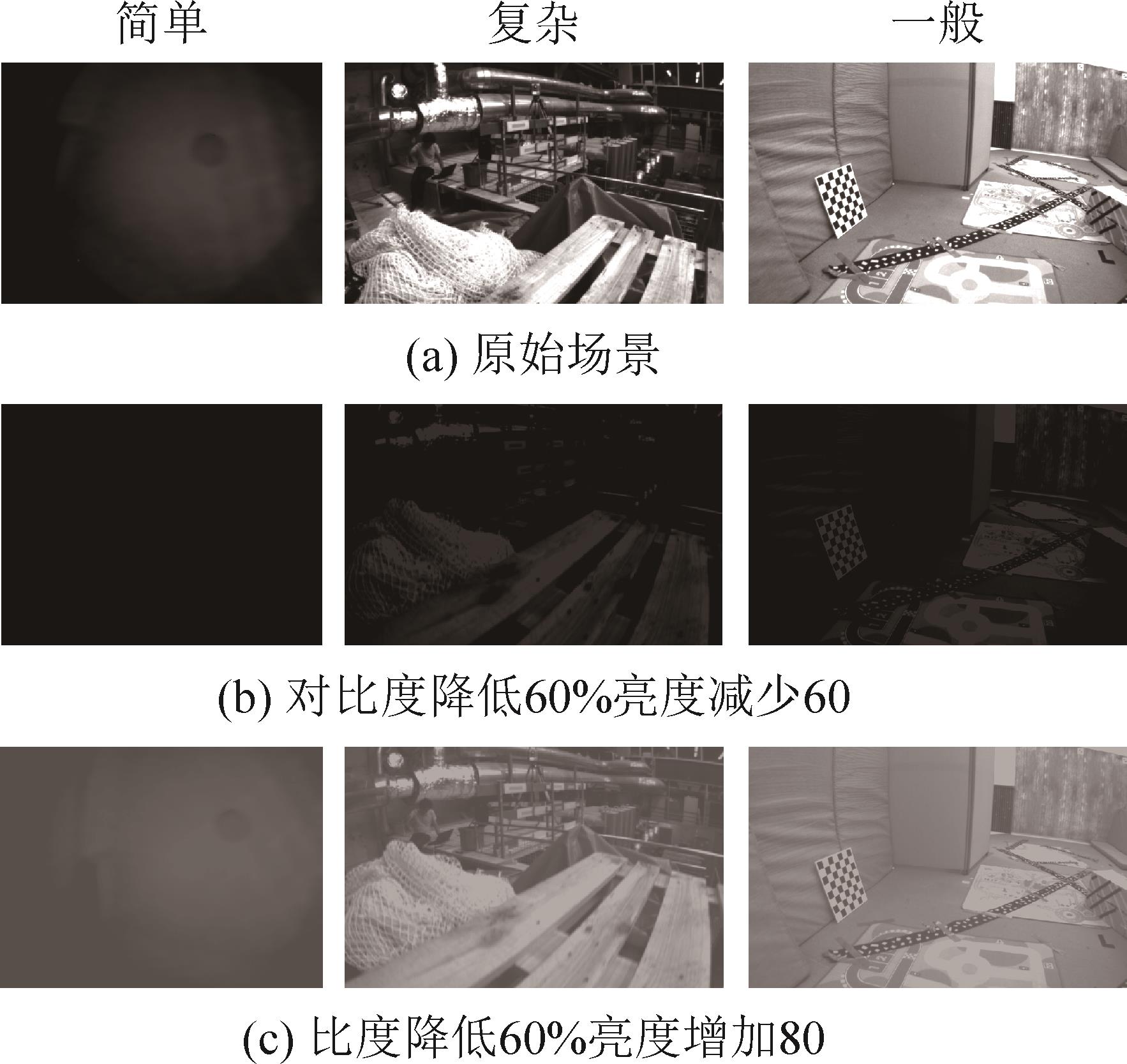
Table 1
Feature matching in original images
| 方法 | 场景 | ||||
|---|---|---|---|---|---|
FAST (阈值7) | 简单 | 2 | 0 | 0 | 0 |
| 复杂 | 3 823 | 3 647 | 3 373 | 92.49 | |
| 一般 | 5 401 | 5 128 | 4 109 | 80.13 | |
FAST (阈值20) | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 1 790 | 1 730 | 1 689 | 97.63 | |
| 一般 | 1 484 | 1 037 | 891 | 85.92 | |
| BRISK | 简单 | 1 | 0 | 0 | 0 |
| 复杂 | 1 271 | 1 206 | 1 108 | 91.87 | |
| 一般 | 1 874 | 1 734 | 1 508 | 86.97 | |
| AKAZE | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 554 | 525 | 489 | 93.14 | |
| 一般 | 1 128 | 1 061 | 956 | 89.16 | |
| TOHF | 简单 | 86 | 60 | 50 | 83.33 |
| 复杂 | 814 | 760 | 738 | 97.10 | |
| 一般 | 1 199 | 951 | 857 | 90.12 |
Table 2
Feature matching with 60% contrast reduction and 60 brightness reduction
| 方法 | 场景 | ||||
|---|---|---|---|---|---|
FAST (阈值7) | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 733 | 639 | 621 | 97.18 | |
| 一般 | 1 137 | 954 | 843 | 88.36 | |
FAST (阈值20) | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 102 | 94 | 76 | 80.85 | |
| 一般 | 274 | 248 | 211 | 85.08 | |
| BRISK | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 14 | 11 | 5 | 45.45 | |
| 一般 | 150 | 132 | 112 | 84.85 | |
| AKAZE | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 3 | 1 | 0 | 0 | |
| 一般 | 176 | 116 | 101 | 87.07 | |
| TOHF | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 685 | 616 | 598 | 97.08 | |
| 一般 | 100 | 84 | 78 | 92.86 |
Table 3
Feature matching with 60% contrast reduction and 60 brightness increase
| 方法 | 场景 | ||||
|---|---|---|---|---|---|
FAST (阈值7) | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 1417 | 1281 | 1200 | 93.68 | |
| 一般 | 1593 | 1281 | 1104 | 86.18 | |
FAST (阈值20) | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 261 | 217 | 189 | 87.10 | |
| 一般 | 447 | 386 | 341 | 88.34 | |
| BRISK | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 156 | 134 | 116 | 86.57 | |
| 一般 | 523 | 516 | 455 | 88.18 | |
| AKAZE | 简单 | 0 | 0 | 0 | 0 |
| 复杂 | 106 | 89 | 78 | 87.64 | |
| 一般 | 434 | 417 | 371 | 88.97 | |
| TOHF | 简单 | 71 | 66 | 54 | 81.82 |
| 复杂 | 763 | 696 | 653 | 93.82 | |
| 一般 | 427 | 373 | 345 | 92.49 |

Fig.6
Qualitative comparison of TOHF
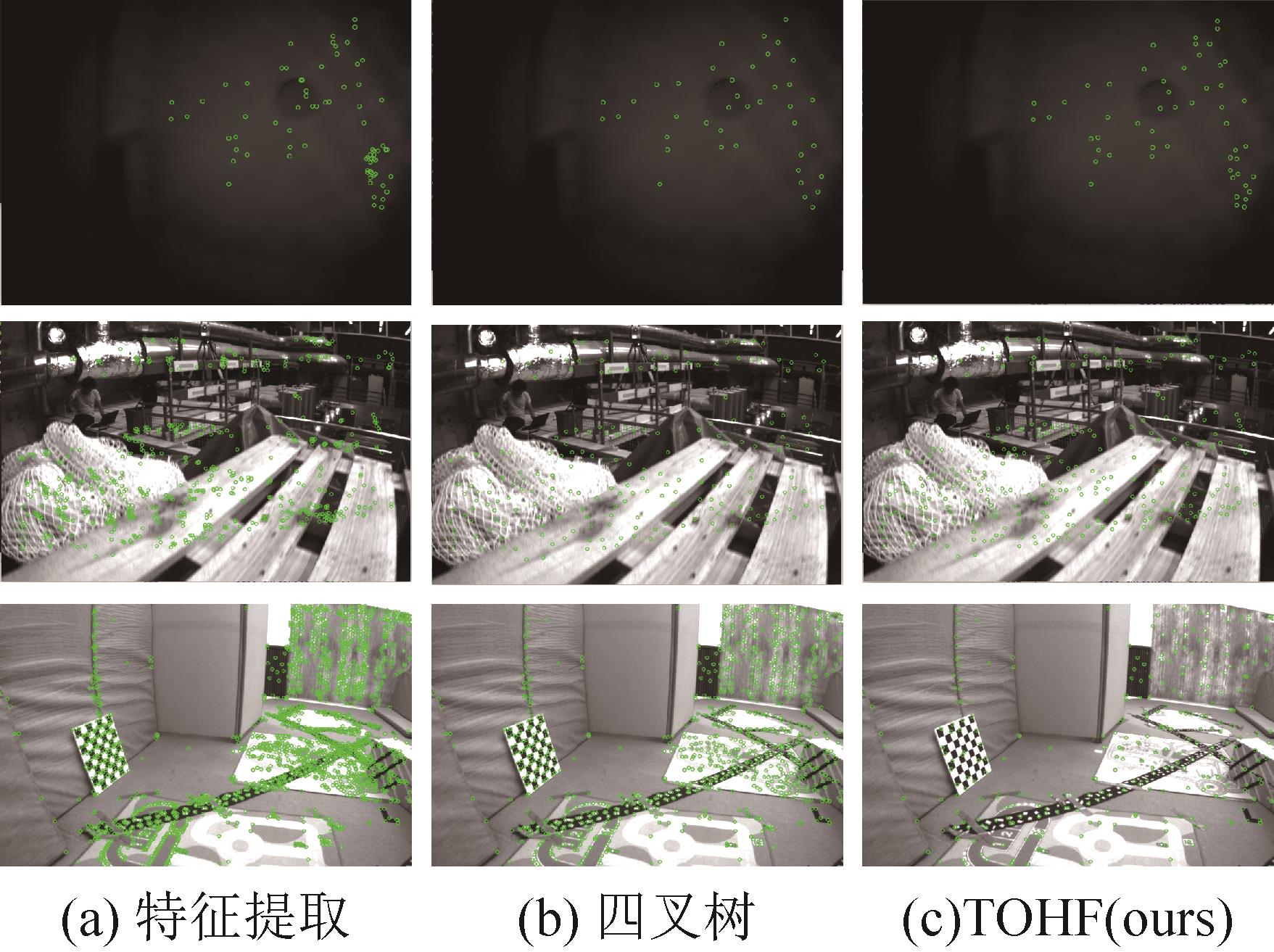
Table 4
Quantitative comparison of TOHF
| 方法 | 场景 | ||||
|---|---|---|---|---|---|
| 特征提取 | 简单 | 86 | — | 50 | 83.33 |
| 复杂 | 814 | — | 638 | 96.67 | |
| 一般 | 1 199 | — | 407 | 90.24 | |
| 四叉树方法 | 简单 | 86 | 42 | 37 | 88.09 |
| 复杂 | 814 | 184 | 178 | 96.74 | |
| 一般 | 1 199 | 973 | 897 | 92.19 | |
| TOHF | 简单 | 86 | 53 | 49 | 92.45 |
| 复杂 | 814 | 283 | 278 | 98.23 | |
| 一般 | 1 199 | 287 | 264 | 91.99 |
Tab.5
Experimental results on different subsets of the EuRoc dataset
| 数据集 | ORB-SLAM3 (20,7) | 面向纹理的特征提取 (消融1) | 密度感知均匀化处理 (消融2) | TOHF-SLAM | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ATE | ATE | ATE | ATE | |||||||||
| MH01 | 0.057 | 3 681 | 203.7 | 0.029 | 3 680 | 213.7 | 0.025 | 3 679 | 204.4 | 0.018 | 3 687 | 209.9 |
| MH02 | 0.068 | 3 043 | 180.3 | 0.038 | 3 042 | 179.1 | 0.019 | 3 040 | 169.9 | 0.021 | 3 047 | 177.7 |
| MH03 | 0.059 | 2 704 | 154.0 | 0.047 | 2 697 | 150.6 | 0.038 | 2 706 | 155.8 | 0.036 | 2 705 | 155.3 |
| MH04 | 0.129 | 2 029 | 114.0 | 0.108 | 2 031 | 114.2 | 0.082 | 2 033 | 115.9 | 0.097 | 2 032 | 114.2 |
| MH05 | 0.077 | 2 274 | 127.2 | 0.053 | 2 272 | 130.4 | 0.058 | 2 273 | 1276 | 0.053 | 2 271 | 129.6 |
| V101 | 0.045 | 2 913 | 160.8 | 0.038 | 2 916 | 163.8 | 0.041 | 2 912 | 162.6 | 0.040 | 2 910 | 165.9 |
| V102 | 0.027 | 1 705 | 97.1 | 0.014 | 1 704 | 97.1 | 0.014 | 1 710 | 99.2 | 0.013 | 1 716 | 98.6 |
| V103 | 0.036 | 2 149 | 120.1 | 0.028 | 2 144 | 119.8 | 0.031 | 2 153 | 127.6 | 0.025 | 2 140 | 123.7 |
| V201 | 0.051 | 2 283 | 128.1 | 0.043 | 2 276 | 132.4 | 0.042 | 2 281 | 127.6 | 0.041 | 2 287 | 128.5 |
| V202 | 0.019 | 2 346 | 132.1 | 0.011 | 2 353 | 145.1 | 0.016 | 2 344 | 131.4 | 0.014 | 2 339 | 130.7 |
| V203 | 0.053 | 1 994 | 128.8 | 0.018 | 1 992 | 128.5 | 0.030 | 1 999 | 132.6 | 0.021 | 1 987 | 127.9 |
| 平均值 | 0.056 | — | 140.6 | 0.039 | — | 143.1 | 0.036 | — | 141.3 | 0.035 | — | 142.0 |

Fig. 7
Reprojection error distribution on EuRoc partial molecular datasets

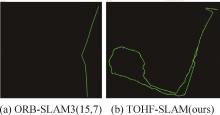
Fig. 8
Experimental results on the Room dataset
| 1 | Chen Weifeng, Shang Guangtao, Ji Aihong, et al. An Overview on Visual SLAM: From Tradition to Semantic[J]. Remote Sensing, 2022, 14(13): 3010. |
| 2 | 王浩宇, 龚光红, 蔡继红, 等. 基于战场元宇宙的动态三维场景感知[J]. 系统仿真学报, 2023, 35(10): 2262-2278. |
| Wang Haoyu, Gong Guanghong, Cai Jihong, et al. Dynamic 3D Scene Perception Based on Battlefield Metaverse[J]. Journal of System Simulation, 2023, 35(10): 2262-2278. | |
| 3 | Tourani Ali, Bavle Hriday, Jose Luis Sanchez-Lopez, et al. Visual SLAM: What Are the Current Trends and What to Expect?[J]. Sensors, 2022, 22(23): 9297. |
| 4 | Yin Jun, Luo Dongting, Yan Fei, et al. A Novel Lidar-assisted Monocular Visual SLAM Framework for Mobile Robots in Outdoor Environments[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-11. |
| 5 | Wenzel Patrick, Yang Nan, Wang Rui, et al. 4Seasons: Benchmarking Visual SLAM and Long-term Localization for Autonomous Driving in Challenging Conditions[J]. International Journal of Computer Vision, 2024: 1-23. |
| 6 | Shen Xiuqiang, Chen Lihang, Hu Zhuhua, et al. A Closed-loop Detection Algorithm for Online Updating of Bag-of-words Model[C]//Proceedings of the 2023 9th International Conference on Computing and Data Engineering. New York: ACM, 2023: 34-40. |
| 7 | Chen Mingyou, Tang Yunchao, Zou Xiangjun, et al. 3D Global Mapping of Large-scale Unstructured Orchard Integrating Eye-in-hand Stereo Vision and SLAM[J]. Computers and Electronics in Agriculture, 2021, 187: 106237. |
| 8 | 于雅楠, 史敦煌, 华春杰. 特征点法SLAM视觉里程计自适应优化算法[J]. 系统仿真学报, 2022, 34(1): 104-112. |
| Yu Yanan, Shi Dunhuang, Hua Chunjie. Adaptive Optimization in Feature-based SLAM Visual Odometry[J]. Journal of System Simulation, 2022, 34(1): 104-112. | |
| 9 | Fu Yuexin, Han Bing, Hu Zhuhua, et al. CBAM-SLAM: A Semantic SLAM Based on Attention Module in Dynamic Environment[C]//2022 6th Asian Conference on Artificial Intelligence Technology (ACAIT). Piscataway: IEEE, 2022: 1-6. |
| 10 | Qi Hao, Hu Zhuhua, Xiang Yunfeng, et al. ATY-SLAM: A Visual Semantic SLAM for Dynamic Indoor Environments[C]//Advanced Intelligent Computing Technology and Applications. Singapore: Springer Nature Singapore, 2023: 3-14. |
| 11 | Cai Dupeng, Hu Zhuhua, Li Ruoqing, et al. AGAM-SLAM: An Adaptive Dynamic Scene Semantic SLAM Method Based on GAM[C]//Advanced Intelligent Computing Technology and Applications. Singapore: Springer Nature Singapore, 2023: 27-39. |
| 12 | Sengupta A, Ye Yuting, Wang R, et al. Going Deeper in Spiking Neural Networks: VGG and Residual Architectures[J]. Frontiers in Neuroscience, 2019, 13: 95. |
| 13 | 林士琪, 王纪凯, 裴浩渊, 等. 基于物体关系描述的单目语义SLAM方法[J]. 系统仿真学报, 2022, 34(2): 278-284. |
| Lin Shiqi, Wang Jikai, Pei Haoyuan, et al. Monocular Semantic SLAM Method Based on Object Relation Description[J]. Journal of System Simulation, 2022, 34(2): 278-284. | |
| 14 | Sun Jiaming, Shen Zehong, Wang Yuang, et al. LoFTR: Detector-free Local Feature Matching with Transformers[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021: 8918-8927. |
| 15 | Lindenberger Philipp, Sarlin Paul-Edouard, Pollefeys Marc. LightGlue: Local Feature Matching at Light Speed[C]//2023 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2023: 17581-17592. |
| 16 | Shi Jianbo, Tomasi C. Good Features to Track[C]//1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 1994: 593-600. |
| 17 | Harris C, Stephens M. A Combined Corner and Edge Detector[C]//Proceedings of the Alvey Vision Conference. Durham: Alvety Vision Club, 1988: 23.1-23.6. |
| 18 | Chen Xinyu, Yu Yantao. HLE-SLAM: SLAM for Overexposed Construction Environment[C]//ISARC. Proceedings of the International Symposium on Automation and Robotics in Construction. IAARC Publications, 2023, 40: 585-588. |
| 19 | Davison A J, Reid I D, Molton N D, et al. MonoSLAM: Real-time Single Camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 20 | Lowe David G. Distinctive Image Features from Scale-invariant Keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
| 21 | Munich M E, Pirjanian P, Di Bernardo E, et al. SIFT-ing Through Features with ViPR[J]. IEEE Robotics & Automation Magazine, 2006, 13(3): 72-77. |
| 22 | Bay Herbert, Ess Andreas, Tuytelaars Tinne, et al. Speeded-up Robust Features (SURF)[J]. Computer Vision and Image Understanding, 2008, 110(3): 346-359. |
| 23 | Viswanathan D G. Features from Accelerated Segment Test (Fast)[C]//Proceedings of the 10th Workshop on Image Analysis for Multimedia Interactive Services. [S.l.: s.n.], 2009: 6-8. |
| 24 | Zhang Jie, Xiong Shuai, Liu Cheng, et al. FPGA-based Feature Extraction and Tracking Accelerator for Real-time Visual SLAM[J]. Sensors, 2023, 23(19): 8035. |
| 25 | Lei Hua, Zhang Yi, Zhao Xiang, et al. A Stereo Matching Algorithm for Fast Extraction of Binocular Depth in Visual SLAM[C]//2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC). Piscataway: IEEE, 2022: 386-391. |
| 26 | Rublee E, Rabaud V, Konolige K, et al. ORB: An Efficient Alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision. Piscataway: IEEE, 2011: 2564-2571. |
| 27 | You Yingxuan, Wei Peng, Cai Jialun, et al. MISD-SLAM: Multimodal Semantic SLAM for Dynamic Environments[J]. Wireless Communications and Mobile Computing, 2022, 2022(1): 7600669. |
| 28 | Andréa Macario Barros, Michel Maugan, Moline Yoann, et al. A Comprehensive Survey of Visual SLAM Algorithms[J]. Robotics, 2022, 11(1): 24. |
| 29 | Chi Ming Chung, Yang Che Tseng, Ching Hsu Ya, et al. Orbeez-SLAM: A Real-time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2023: 9400-9406. |
| 30 | Campos Carlos, Elvira Richard, J Gómez Rodríguez Juan, et al. ORB-SLAM3: An Accurate Open-source Library for Visual, Visual-inertial, and Multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 31 | Neira José, Tardós Juan D. Data Association in Stochastic Mapping Using the Joint Compatibility Test[J]. IEEE Transactions on Robotics and Automation, 2001, 17(6): 890-897. |
| 32 | Rao Dan, Yuan Yuhao, Chen Xin. Research on Feature Extraction and Matching Algorithm in Visual SLAM[C]//2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC). Piscataway: IEEE, 2021: 522-526. |
| 33 | Watson A B. Digital Images and Human Vision[M]. Cambridge: MIT Press, 1993. |
| 34 | Ma Chaoqun, Hu Xiaoguang, Xiao Jin, et al. Homogenized ORB Algorithm Using Dynamic Threshold and Improved Quadtree[J]. Mathematical Problems in Engineering, 2021, 2021(1): 6693627. |
| 35 | Leutenegger Stefan, Chli Margarita, Siegwart Roland Y. BRISK: Binary Robust Invariant Scalable Keypoints[C]//2011 International Conference on Computer Vision. Piscataway: IEEE, 2011: 2548-2555. |
| 36 | Alcantarilla P F, Solutions T. Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 34(7): 1281-1298. |
| 37 | Burri Michael, Nikolic Janosch, Gohl Pascal, et al. The EuRoC Micro Aerial Vehicle Datasets[J]. The International Journal of Robotics Research, 2016, 35(10): 1157-1163. |
| 38 | David Zuñiga Noël, Jaenal Alberto, Ruben Gomez Ojeda, et al. The UMA-VI Dataset: Visual-inertial Odometry in Low-textured and Dynamic Illumination Environments[J]. The International Journal of Robotics Research, 2020, 39(9): 1052-1060. |
| 39 | Sturm Jürgen, Engelhard Nikolas, Endres Felix, et al. A Benchmark for the Evaluation of RGB-D SLAM Systems[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 573-580. |
| 40 | Ferrera Maxime, Eudes Alexandre, Moras Julien, et al. OV2 SLAM: A Fully Online and Versatile Visual SLAM for Real-time Applications[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1399-1406. |
| 41 | Taranco Raúl, Arnau José-Maria, González Antonio. LOCATOR: Low-power ORB Accelerator for Autonomous Cars[J]. Journal of Parallel and Distributed Computing, 2023, 174: 32-45. |
| [1] | Ma Lun, Yang Yue, Wang Daihe, Liao Guisheng, Li Xing. A Model Combining Self-attention and Weight Sharing for Human Activity Recognition [J]. Journal of System Simulation, 2025, 37(9): 2409-2419. |
| [2] | Liu Jia, Zhang Zengwei, Chen Dapeng, Huang Nanxuan, Wang Bin, Song Hong. Improvement of SLAM Localization Accuracy in AR by Enhancing YOLOv8 [J]. Journal of System Simulation, 2025, 37(11): 2701-2713. |
| [3] | Shao Xuqiang, Cheng Ya, Jin Yizhong. 3D Streamline Visualization Method Based on Clustering Fusion [J]. Journal of System Simulation, 2024, 36(3): 625-635. |
| [4] | Fu Qiang, Teng Xianyun, Ji Yuanfa, Ren Fenghua. SLAM Dynamic Algorithm Based on Improved Feature Description [J]. Journal of System Simulation, 2024, 36(11): 2712-2721. |
| [5] | Luo Yucheng, Zhang Ming'en, Liu Fei, Lu Yingbo, Ye Feng. Result Validation Method of Simulation Models Based on Piecewise Feature Extraction [J]. Journal of System Simulation, 2024, 36(1): 272-281. |
| [6] | Zhang Fengquan, Cao Duo, Ma Xiaohan, Chen Baijun, Zhang Jiangxiao. Style Transfer Network for Generating Opera Makeup Details [J]. Journal of System Simulation, 2023, 35(9): 2064-2076. |
| [7] | Yangyang Liu, Gangyi Ding, Dapeng Yan, Tong Xue. Real-time Simulation Method of Ultra-high-definition Video Texture [J]. Journal of System Simulation, 2023, 35(8): 1748-1756. |
| [8] | Huicheng Luo, Shujuan Wang. Multi-camera Vehicle Recognition Method Based on Feature Robustness Enhancement [J]. Journal of System Simulation, 2023, 35(5): 1059-1074. |
| [9] | Weidong Jin, Shuli Zhang, Peng Tang, Man Zhang. Image Dehazing Network Based on Densely Connected Residual Block and Channel Pixel Attention [J]. Journal of System Simulation, 2022, 34(8): 1663-1673. |
| [10] | Zhu Zhichao, Wu Dinghui, Yue Yuanchang. Engine Wear Fault Diagnosis Based on Supervised Kernel Entropy Component Analysis [J]. Journal of System Simulation, 2022, 34(1): 45-52. |
| [11] | Yu Yanan, Shi Dunhuang, Hua Chunjie. Adaptive Optimization in Feature-based SLAM Visual Odometry [J]. Journal of System Simulation, 2022, 34(1): 104-112. |
| [12] | He Mengjia, Wu Yingnian, Yang Rui. Research on Nondestructive Blood Glucose Cloud Detection System Based on Improved Deep Regression Network [J]. Journal of System Simulation, 2019, 31(11): 2492-2498. |
| [13] | Li Qian, Gao Shangbing, Pan Zhigeng, Zhang Zhengwei, Fang Chenghua, Wang Shengquan. Research on Augmented Reality Method Based on Unmarked Recognition [J]. Journal of System Simulation, 2018, 30(7): 2608-2614. |
| [14] | Zhou Yi, Meng Ming, Wu Wei, Zhou Zhong. Virtual-reality Video Fusion System Based on Video Model [J]. Journal of System Simulation, 2018, 30(7): 2550-2557. |
| [15] | Li Jinfang, Li Rifu, He Hanwu, Xu Junlong, Liu Jiayuan, Li Hang. Mesh Morphing Process for Facial Plastic Surgery Simulation [J]. Journal of System Simulation, 2018, 30(7): 2453-2458. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
