

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (6): 1531-1541.doi: 10.16182/j.issn1004731x.joss.24-0516
• Papers • Previous Articles Next Articles
Li Yongling1,3,4, Liu Lingzhi1,3, Zhou Baishun2, Lei Jingfa1,3,4, Zhang Miao1,3, Zhao Ruhai1,3
Received:2024-05-15
Revised:2024-07-24
Online:2025-06-20
Published:2025-06-18
Contact:
Zhou Baishun
CLC Number:
Li Yongling, Liu Lingzhi, Zhou Baishun, Lei Jingfa, Zhang Miao, Zhao Ruhai. Operation System for Simulation Roadheader Based on Visual Motion Capture[J]. Journal of System Simulation, 2025, 37(6): 1531-1541.
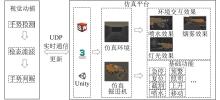
Fig. 1
General simulated framework of roadheader operation system
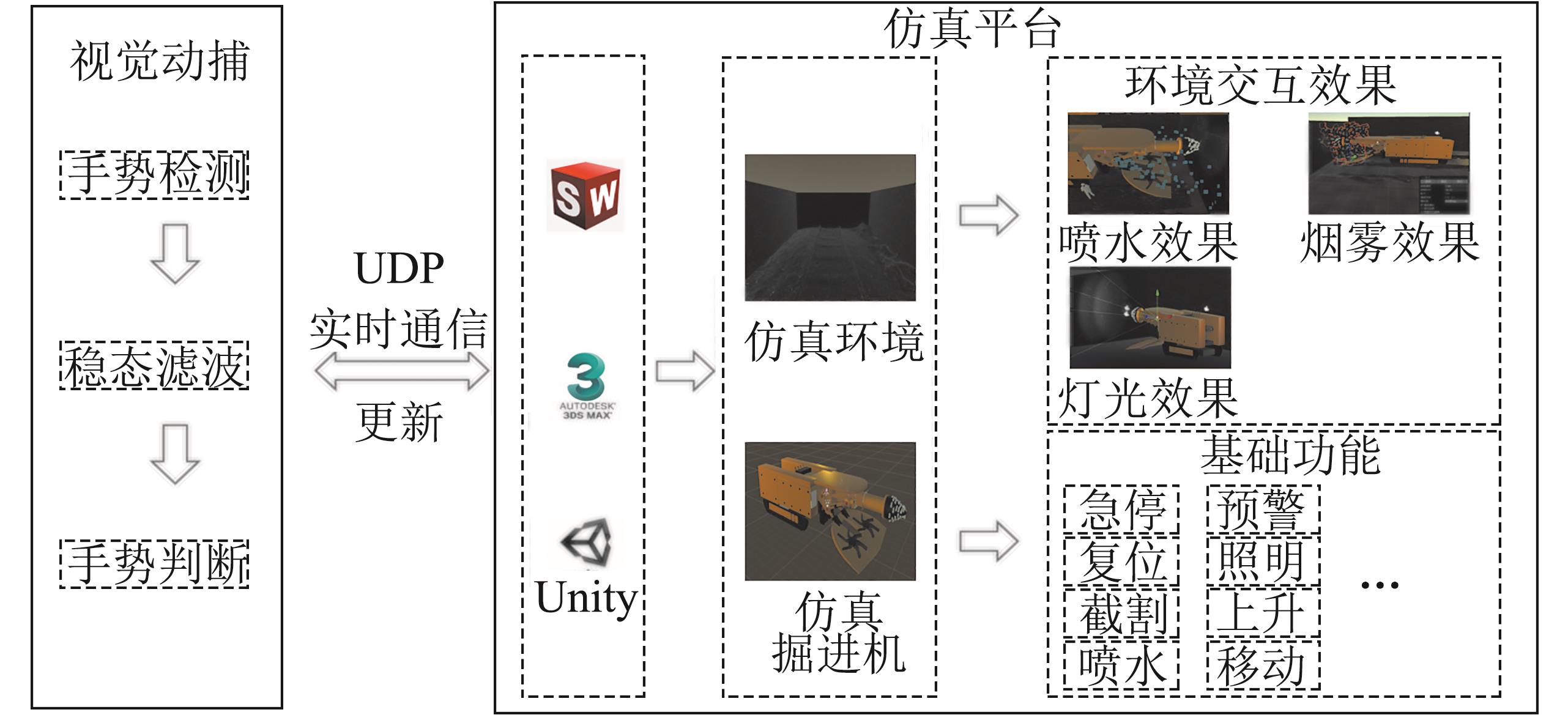
Fig. 2
Overall framework of visual motion capture unit
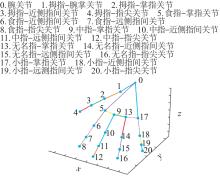
Fig. 3
Hand keypoints coordinate map
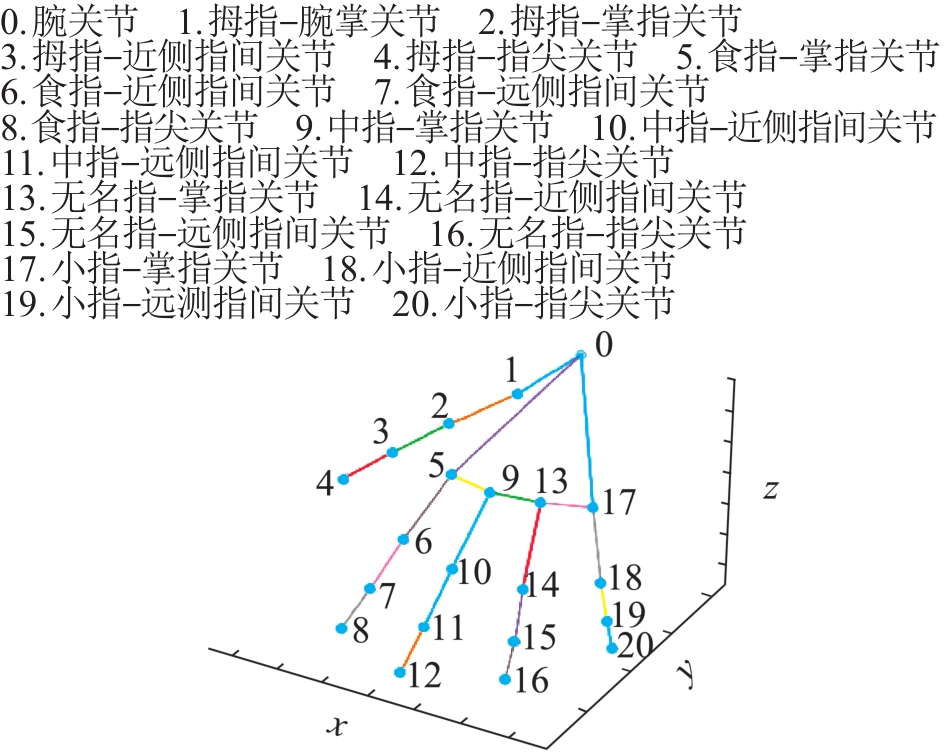
Fig. 4
Gesture presentation effect
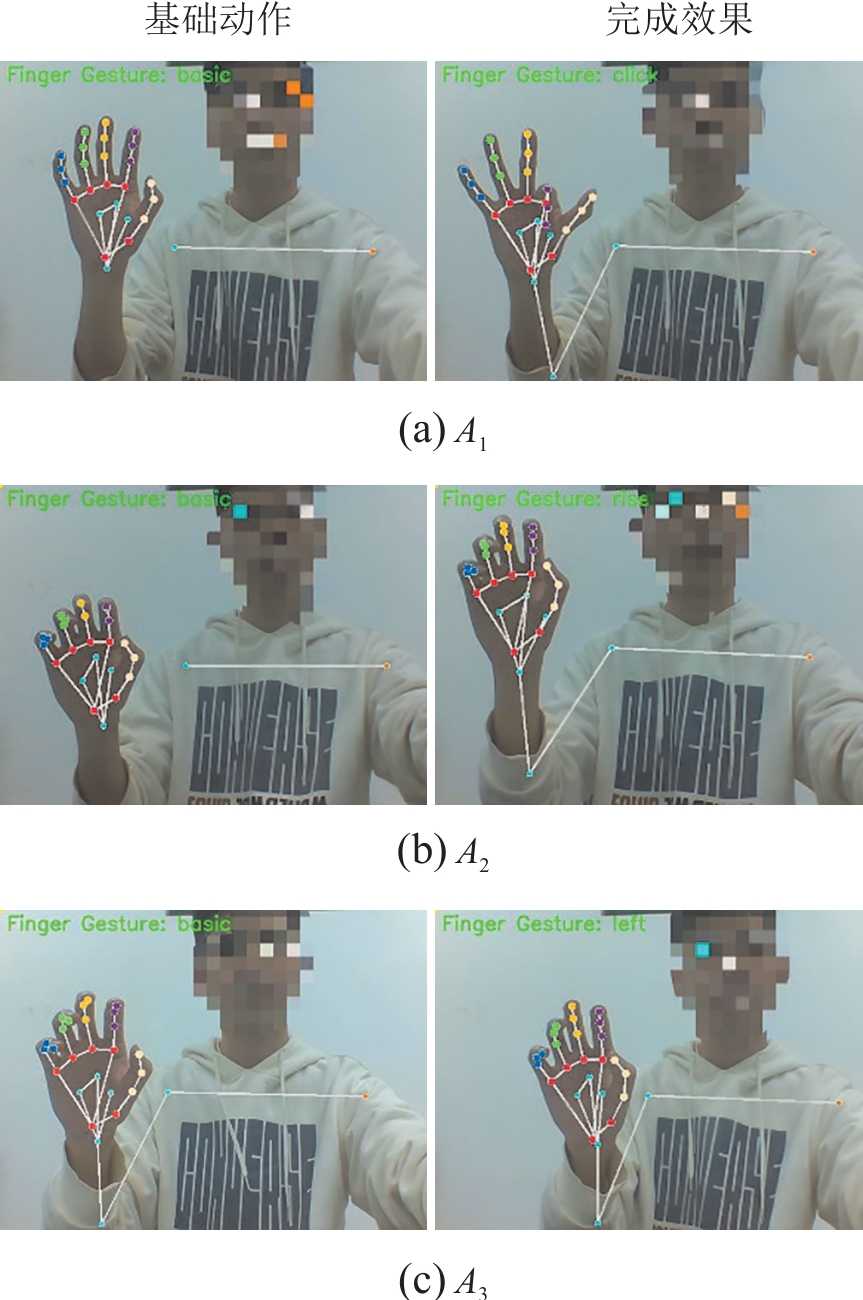
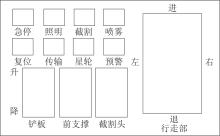
Fig. 5
Simulated operating platform
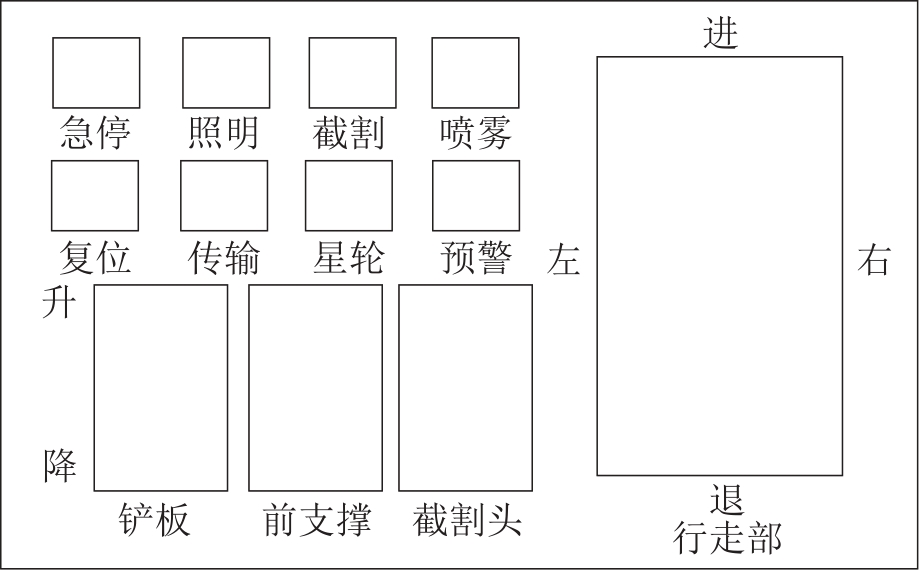
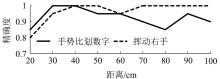
Fig. 6
Relationship between shooting distance and detection accuracy
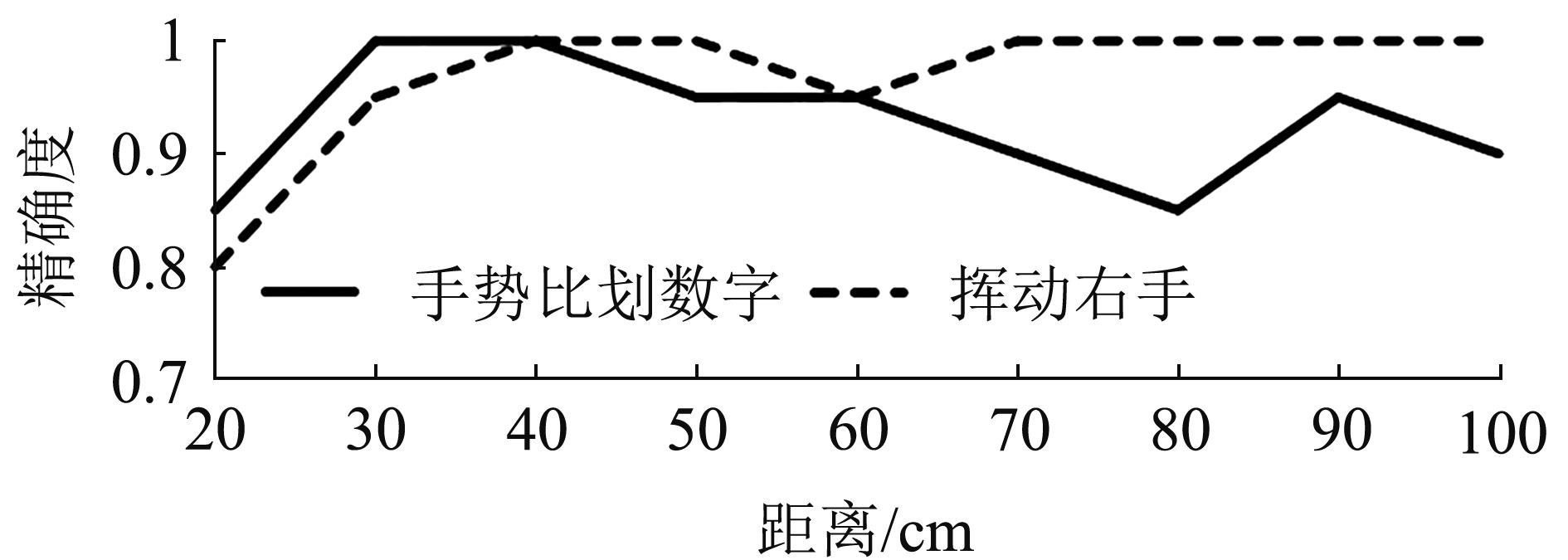

Fig. 7
Change of gesture from straight to clenched state parameters
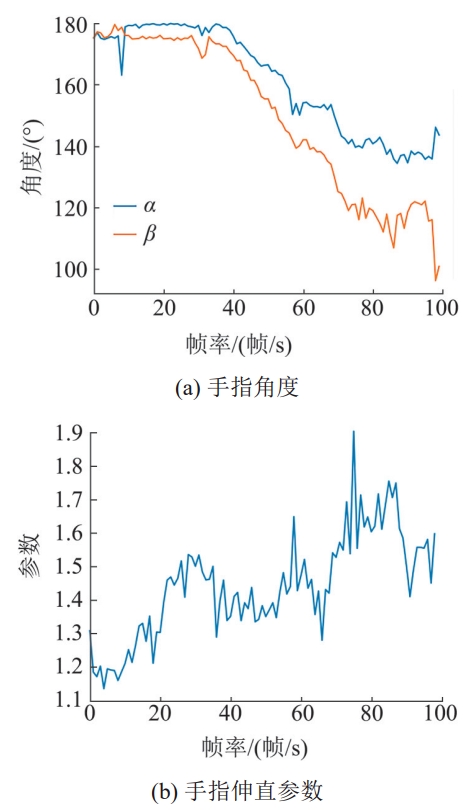
Table 1
Aggregate MSE following data processing using various values of P within the context of this methodology
| P | x | y |
|---|---|---|
| 500 I | 11.503 258 5 | 19.774 344 7 |
| 300 I | 11.503 258 6 | 19.774 344 8 |
| 100 I | 11.503 258 6 | 19.774 344 8 |
| I | 11.503 259 8 | 19.774 352 1 |
| 0.01 I | 11.617 156 5 | 19.970 157 2 |
Table 2
Aggregate MSE following data processing using various values of Q within the context of this methodology
| Q | x | y |
|---|---|---|
| 2 I | 1.547 | 2.664 |
| I | 3.144 | 5.414 |
| 0.1 I | 11.503 | 19.774 |
| 0.05 I | 13.999 | 23.825 |
| 0.01 I | 21.889 | 32.118 |
Table 3
Aggregate MSE following data processing using various values of R within the context of this methodology
| R | x | y |
|---|---|---|
| 10 I | 21.889 | 32.119 |
| 5 I | 17.701 | 28.534 |
| 1 I | 11.503 | 19.774 |
| 0.5 I | 8.876 | 15.282 |
| 0.1 I | 3.144 | 5.414 |
Table 4
Evaluation index of filtering effect
| 参数 | 原视频 | 常规卡尔曼滤波 | 容积卡尔曼滤波 | 扩展卡尔曼滤波 | 本文方法 |
|---|---|---|---|---|---|
| MSE-x | 265.048 | 434.770 | 2 701.726 | 272.835 | |
| MSE-y | 205.727 | 310.543 | 1 450.733 | 211.761 | |
| SNR-x/dB | 14.399 | 11.911 | 4.086 | 14.275 | |
| SNR-y/dB | 13.145 | 10.931 | 3.540 | 13.021 | |
| ApEn-x | 0.459 | 0.371 | 0.374 | 0.677 | 0.352 |
| ApEn-y | 0.670 | 0.560 | 0.541 | 0.742 | 0.558 |
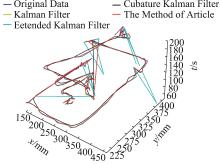
Fig. 8
Original results of key point trajectories and experimental results after processing with various filtering methods
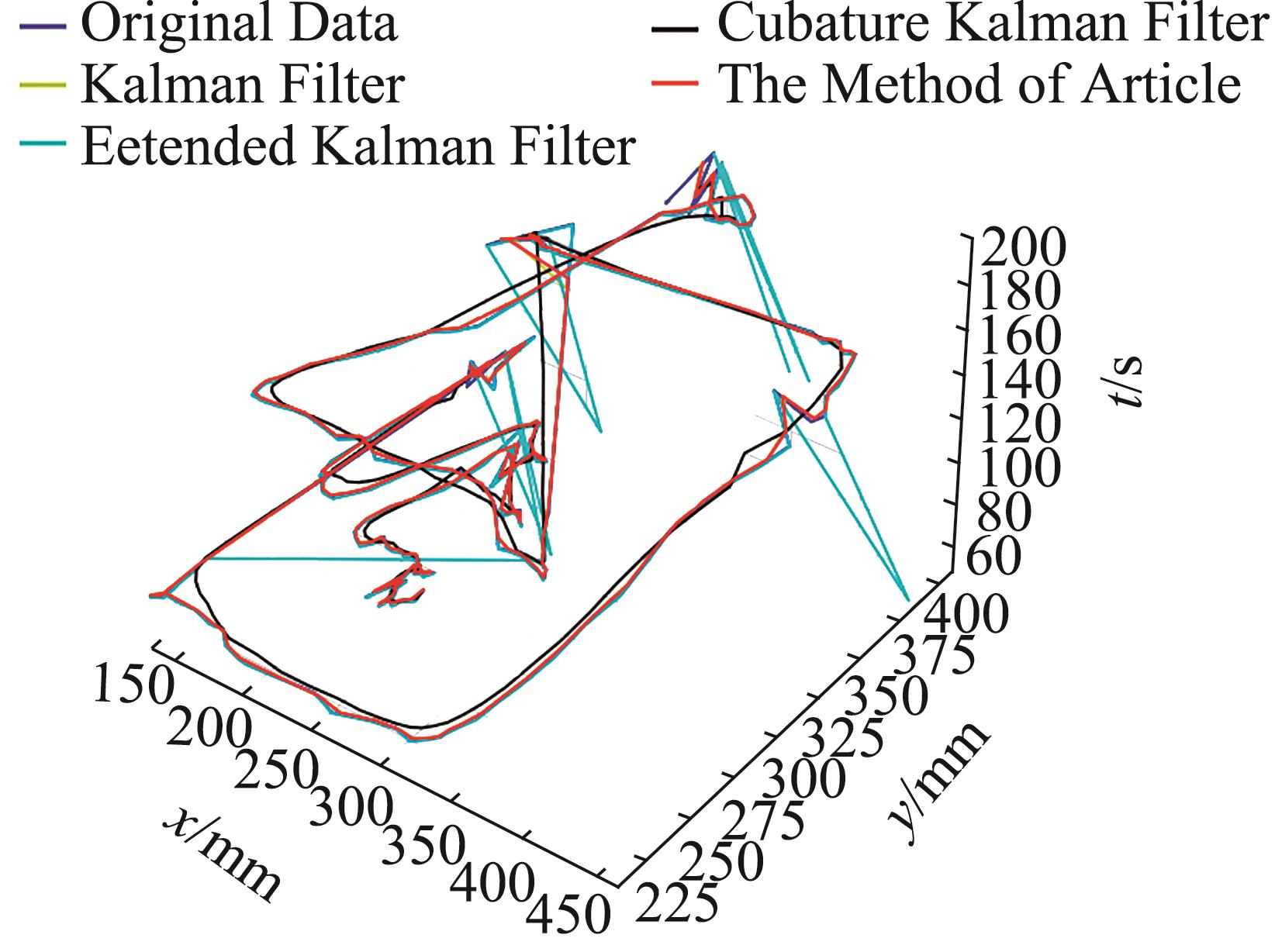
Table5
Gesture detection accurate indicator
| 手势动作 | NTP | NFP | NTN | NFN | Pr/% | Re/% | Ac/% |
|---|---|---|---|---|---|---|---|
| A1 | 188 | 14 | 186 | 12 | 93 | 94 | 94 |
| A2 | 189 | 23 | 177 | 11 | 89 | 95 | 92 |
| A3 | 185 | 14 | 186 | 15 | 93 | 93 | 93 |
| 1 | 董泽宇, 刘政, 李勇, 等. 基于混合现实的可移动机械臂操作控制系统[J]. 激光与光电子学进展, 2024, 61(4): 271-279. |
| Dong Zeyu, Liu Zheng, Li Yong, et al. Operation Control System for Movable Robotic Arm Based on Mixed Reality[J]. Laser & Optoelectronics Progress, 2024, 61(4): 271-279. | |
| 2 | 邵绪强, 张浩伟, 冯小华. 面向电力变压器虚拟装配的多感官融合交互方法[J]. 系统仿真学报, 2022, 34(10): 2244-2254. |
| Shao Xuqiang, Zhang Haowei, Feng Xiaohua. Multi-sensory Fusion Method for Power Transformer Virtual Assembly[J]. Journal of System Simulation, 2022, 34(10): 2244-2254. | |
| 3 | 方维, 许澍虹, 韩磊, 等. AR增强装配中的跟踪注册方法研究与应用进展[J]. 系统仿真学报, 2023, 35(7): 1438-1454. |
| Fang Wei, Xu Shuhong, Han Lei, et al. Research and Application Progress of Tracking Registration Methods in AR Assembly[J]. Journal of System Simulation, 2023, 35(7): 1438-1454. | |
| 4 | 张旭辉, 王甜, 张超, 等. 数字孪生驱动的悬臂式掘进机虚拟示教记忆截割方法[J]. 煤炭学报, 2023, 48(11): 4247-4260. |
| Zhang Xuhui, Wang Tian, Zhang Chao, et al. DT-driven Memory Cutting Control Method Using VR Instruction of Boom-type Roadheader[J]. Journal of China Coal Society, 2023, 48(11): 4247-4260. | |
| 5 | 张旭辉, 张超, 王妙云, 等. 数字孪生驱动的悬臂式掘进机虚拟操控技术[J]. 计算机集成制造系统, 2021, 27(6): 1617-1628. |
| Zhang Xuhui, Zhang Chao, Wang Miaoyun, et al. Digital Twin-driven Virtual Control Technology of Cantilever Roadheader[J]. Computer Integrated Manufacturing Systems, 2021, 27(6): 1617-1628. | |
| 6 | 蔡兴旺, 裴耀强, 杨继华, 等. 煤矿掘进机系统数字孪生技术研究[J]. 系统仿真学报, 2024, 36(10): 2455-2468. |
| Cai Xingwang, Pei Yaoqiang, Yang Jihua, et al. Research on Digital Twin Technology of Coal Mine Tunneling Machine System[J]. Journal of System Simulation, 2024, 36(10): 2455-2468. | |
| 7 | 王涛, 吴迎年, 杨睿, 等. 基于IMU与sEMG混合信号的实时手势分类算法研究[J]. 系统仿真学报, 2023, 35(2): 359-371. |
| Wang Tao, Wu Yingnian, Yang Rui, et al. Research on Real-time Gesture Classification Algorithm Based on IMU and sEMG Mixed Signals[J]. Journal of System Simulation, 2023, 35(2): 359-371. | |
| 8 | 朱银龙, 沈宏骏, 吴杰, 等. 基于柔性应变传感器的数据手套手势识别研究[J]. 农业机械学报, 2024, 55(6): 451-458. |
| Zhu Yinlong, Shen Hongjun, Wu Jie, et al. Data Glove Gesture Recognition Based on Flexible Strain Sensors[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(6): 451-458. | |
| 9 | 吴常铖, 曹青青, 费飞, 等. 基于数据手套和神经网络的数字手势识别方法[J]. 东南大学学报(自然科学版), 2020, 50(3): 563-569. |
| Wu Changcheng, Cao Qingqing, Fei Fei, et al. Digital Gesture Recognition Method Based on Data Glove and Neural Networks[J]. Journal of Southeast University(Natural Science Edition), 2020, 50(3): 563-569. | |
| 10 | 叶素芬, 赖际舟, 吕品, 等. 穿戴式钢琴弹奏手套智能感知与手势识别技术[J]. 仪器仪表学报, 2019, 40(5): 187-194. |
| Ye Sufen, Lai Jizhou, Pin Lü, et al. An Intelligent Perception and Gesture Recognition Technology for Wearable Piano-playing Glove[J]. Chinese Journal of Scientific Instrument, 2019, 40(5): 187-194. | |
| 11 | 蔡嘉怡, 初萍, 庄伦涛, 等. 基于空间属性特征的毫米波雷达身体干扰识别[J]. 系统工程与电子技术, 2024, 46(10): 3365-3374. |
| Cai Jiayi, Chu Ping, Zhuang Luntao, et al. Millimeter-wave Radar Body Interference Recognition Based on Spatial Attribute Features[J]. Systems Engineering and Electronics, 2024, 46(10): 3365-3374. | |
| 12 | 冯翔, 刘涛, 崔文卿, 等. 基于双视角时序特征融合的毫米波雷达手势数字识别研究[J]. 电子与信息学报, 2023, 45(6): 2134-2143. |
| Feng Xiang, Liu Tao, Cui Wenqing, et al. Handwriting Number Recognition Based on Millimeter-wave Radar with Dual-view Feature Fusion Network[J]. Journal of Electronics & Information Technology, 2023, 45(6): 2134-2143. | |
| 13 | 康来, 张亚坤. 基于多维投影时空事件帧的动态视觉传感手势识别[J]. 系统仿真学报, 2024, 36(3): 649-658. |
| Kang Lai, Zhang Yakun. Gesture Recognition for Dynamic Vision Sensor Based on Multi-dimensional Projection Spatiotemporal Event Frame[J]. Journal of System Simulation, 2024, 36(3): 649-658. | |
| 14 | 张美娜, 王潇, 梁万杰, 等. 温室远程监控系统人机交互与番茄识别研究[J]. 农业机械学报, 2022, 53(10): 363-370. |
| Zhang Meina, Wang Xiao, Liang Wanjie, et al. Human-computer Interaction and Tomato Recognition in Greenhouse Remote Monitoring System[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 363-370. | |
| 15 | 张旭辉, 张雨萌, 王岩, 等. 融合数字孪生与混合现实技术的机电设备辅助维修方法[J]. 计算机集成制造系统, 2021, 27(8): 2187-2195. |
| Zhang Xuhui, Zhang Yumeng, Wang Yan, et al. Auxiliary Maintenance Method for Electromechanical Equipment Integrating Digital Twin and Mixed Reality Technology[J]. Computer Integrated Manufacturing Systems, 2021, 27(8): 2187-2195. | |
| 16 | Lugaresi C, Tang Jiuqiang, Nash H, et al. MediaPipe: A Framework for Building Perception Pipelines[EB/OL]. (2019-06-14) [2024-04-19]. . |
| 17 | 张云佐, 董旭, 蔡昭权. 拟合下肢几何特征的多视角步态周期检测[J]. 吉林大学学报(工学版), 2023, 53(9): 2611-2619. |
| Zhang Yunzuo, Dong Xu, Cai Zhaoquan. Multi View Gait Cycle Detection by Fitting Geometric Features of Lower Limbs[J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2611-2619. | |
| 18 | Hasanov Jamaladdin, Alishzade Nigar, Nazimzade A, et al. Development of a Hybrid Word Recognition System and Dataset for the Azerbaijani Sign Language Dactyl Alphabet[J]. Speech Communication, 2023, 153: 102960. |
| 19 | Dill Sebastian, Rösch Andreas, Rohr Maurice, et al. Accuracy Evaluation of 3D Pose Estimation with MediaPipe Pose for Physical Exercises[J]. Current Directions in Biomedical Engineering, 2023, 9(1): 563-566. |
| 20 | 许杰, 戚大伟. 基于改进加权质心和UKF的移动目标定位算法[J]. 吉林大学学报(工学版), 2016, 46(4): 1354-1359. |
| Xu Jie, Qi Dawei. Moving Target Localization Based on Improved Weighted Centroid and UKF Algorithm[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(4): 1354-1359. | |
| 21 | 张鋆豪, 何百岳, 杨旭升, 等. 基于可穿戴式惯性传感器的人体运动跟踪方法综述[J]. 自动化学报, 2019, 45(8): 1439-1454. |
| Zhang Junhao, He Baiyue, Yang Xusheng, et al. A Review on Wearable Inertial Sensor Based Human Motion Tracking[J]. Acta Automatica Sinica, 2019, 45(8): 1439-1454. | |
| 22 | 黄伟, 付红坡, 李煜, 等. 一种高斯-重尾切换分布鲁棒卡尔曼滤波器[J]. 哈尔滨工业大学学报, 2024, 56(4): 12-23. |
| Huang Wei, Fu Hongpo, Li Yu, et al. A Gaussian-heavy-tailed Switching Distribution Robust Kalman Filter[J]. Journal of Harbin Institute of Technology, 2024, 56(4): 12-23. | |
| 23 | 孟杰, 杨鹏程, 杨朝, 等. 基于Mediapipe的幻影成像装置自然手势交互系统设计[J]. 国外电子测量技术, 2023, 42(3): 116-122. |
| Meng Jie, Yang Pengcheng, Yang Zhao, et al. Design of Natural Gesture Interaction System for Phantom Imaging Device Based on Mediapipe[J]. Foreign Electronic Measurement Technology, 2023, 42(3): 116-122. | |
| 24 | Benitez-Garcia Gibran, Olivares-Mercado Jesus, Sanchez-Perez Gabriel, et al. IPN Hand: A Video Dataset and Benchmark for Real-time Continuous Hand Gesture Recognition[C]//2020 25th International Conference on Pattern Recognition (ICPR). Piscataway, NJ, USA: IEEE, 2021: 4340-4347. |
| 25 | 杨旭升, 王雪儿, 汪鹏君, 等. 基于渐进无迹卡尔曼滤波网络的人体肢体运动估计[J]. 自动化学报, 2023, 49(8): 1723-1731. |
| Yang Xusheng, Wang Xueer, Wang Pengjun, et al. Estimation of Human Limb Motion Based on Progressive Unscented Kalman Filter Network[J]. Acta Automatica Sinica, 2023, 49(8): 1723-1731. | |
| 26 | 仇大伟, 曹慧, 刘静. 中医正骨仿真训练系统中噪声数据的处理方法[J]. 激光与光电子学进展, 2020, 57(3): 122-131. |
| Qiu Dawei, Cao Hui, Liu Jing. Noise Data Processing Methods in Simulation and Training System of Bone-setting Manipulations in Traditional Chinese Medicine[J]. Laser & Optoelectronics Progress, 2020, 57(3): 122-131. | |
| 27 | 唐洁, 刘晓琴. 基于近似熵的斯隆数字化巡天中 类星体光变复杂性分析[J]. 物理学报, 2019, 68(14): 382-389. |
| Tang Jie, Liu Xiaoqin. Analysis on Complexity of Optical Variability Based on Approximate Entropy in Sloan Digital Sky Survey Quasars[J]. Acta Physica Sinica, 2019, 68(14): 382-389. | |
| 28 | 王洪雁, 张海坤, 罗宇华, 等. 复杂动态背景下基于群稀疏的运动目标检测方法[J]. 电子学报, 2021, 49(12): 2330-2338. |
| Wang Hongyan, Zhang Haikun, Luo Yuhua, et al. Moving Object Detection Method Based on Group Sparseness Under Complex Dynamic Background[J]. Acta Electronica Sinica, 2021, 49(12): 2330-2338. |
| [1] | Zhang Yi, Xu Kai, Li Shuilin, Chen Dejun, Zeng Yunxiu, Peng Yong. Key Problems of Intent Recognition Research: A Survey on Activity, Plan and Goal Recognition [J]. Journal of System Simulation, 2026, 38(3): 620-650. |
| [2] | Li Zonggang, Li Yanbo, Jiao Jianjun, Du Yajiang. A Visual Servo Precision Assembly Method for Riveting Parts Based on Adaptive Extended Kalman Filtering [J]. Journal of System Simulation, 2025, 37(1): 107-118. |
| [3] | Wang Zining, Luo Shijiang, Chen Weiya, Luo Hanbin. Research and Realization of Immersive Skeleton Simulation System [J]. Journal of System Simulation, 2025, 37(1): 145-154. |
| [4] | Deng Wenlang, Wu Minghai, Xie Haipeng, Hu Yingjie. A New Model Predictive Current Controller forAC-DC Matrix Converter in Unbalanced Grids [J]. Journal of System Simulation, 2024, 36(9): 2159-2170. |
| [5] | Li Qinghao, Ren Junsheng, Hua Yan. Parametric Identification of Ship Maneuvering Motion Response Model Based on Square Root Cubature Kalman Filtering [J]. Journal of System Simulation, 2024, 36(8): 1790-1799. |
| [6] | Xinghua Liu, Siwen Dong, Jiaqiang Tian. Secure State Estimation of Distribution Network Based on Kalman Filter Decomposition [J]. Journal of System Simulation, 2023, 35(6): 1191-1202. |
| [7] | Songming Jiao, Hui Ding, Yufei Zhong, Xin Yao, Jiahao Zheng. A UAV Target Tracking and Control Algorithm Based on SiamRPN [J]. Journal of System Simulation, 2023, 35(6): 1372-1380. |
| [8] | Zhiwei Wang, Jizong Hu, Fengjie Wang, Jie Huang. Simulation of Navigation Process Based on Nonlinear Observer [J]. Journal of System Simulation, 2022, 34(5): 1127-1139. |
| [9] | Chuanqian Tang, Zhiqiang Liu, Yijun Su, Xiaojing Liu. Research on Real-Time Motion Matching of Shadow Play Based on Kinect [J]. Journal of System Simulation, 2022, 34(3): 633-639. |
| [10] | Qiming Wang, Jiangyue Jiang, Zhichao Lü, Hanzu Zhang. Research on Cooperative Adaptive Cruise Control Strategy Based on Improved MPC [J]. Journal of System Simulation, 2022, 34(09): 2087-2097. |
| [11] | Ma Lixin, Zhu Yongjie, Ji Leyan. Neural Network Optimized Sensorless Permanent Magnet Synchronous Motor Control System [J]. Journal of System Simulation, 2021, 33(3): 622-630. |
| [12] | Hu Jie, Shi Xiaozhu. Refined Alignment Method for Single-axis Rotary Inertial Navigation Based on Fuzzy Adaptive Filtering [J]. Journal of System Simulation, 2021, 33(2): 315-323. |
| [13] | Wang Yijing, Su Zhong, Li Qing, Li Lei. Simulation of Zero-speed Correction Algorithm for Underground Space Individual Positioning [J]. Journal of System Simulation, 2021, 33(11): 2545-2551. |
| [14] | Wang Ke, Liu Ligang, Zhou Bin, Bu Zhiyong. Research on SINS/GNSS/Train-Speed Integrated Navigation Algorithm [J]. Journal of System Simulation, 2021, 33(1): 189-195. |
| [15] | Li Qi, Wang Xiangdong, Li Hua. 3D Human Pose Tracking Approach Based on Double Kinect Sensors [J]. Journal of System Simulation, 2020, 32(8): 1446-1454. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
