

Journal of System Simulation ›› 2022, Vol. 34 ›› Issue (3): 461-469.doi: 10.16182/j.issn1004731x.joss.20-0796
• Modeling Theory and Methodology • Previous Articles Next Articles
Kui Chen( ), Li Bi(), Wenya Wang
), Li Bi(), Wenya Wang
Received:2020-10-16
Revised:2020-12-14
Online:2022-03-18
Published:2022-03-22
Contact:
Li Bi
E-mail:972463178@qq.com;billy1968@163.com
CLC Number:
Kui Chen, Li Bi, Wenya Wang. Research on Integrated Scheduling of AGV and Machine in Flexible Job Shop[J]. Journal of System Simulation, 2022, 34(3): 461-469.
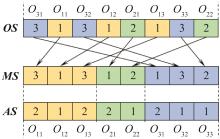
Fig. 1
Particle coding
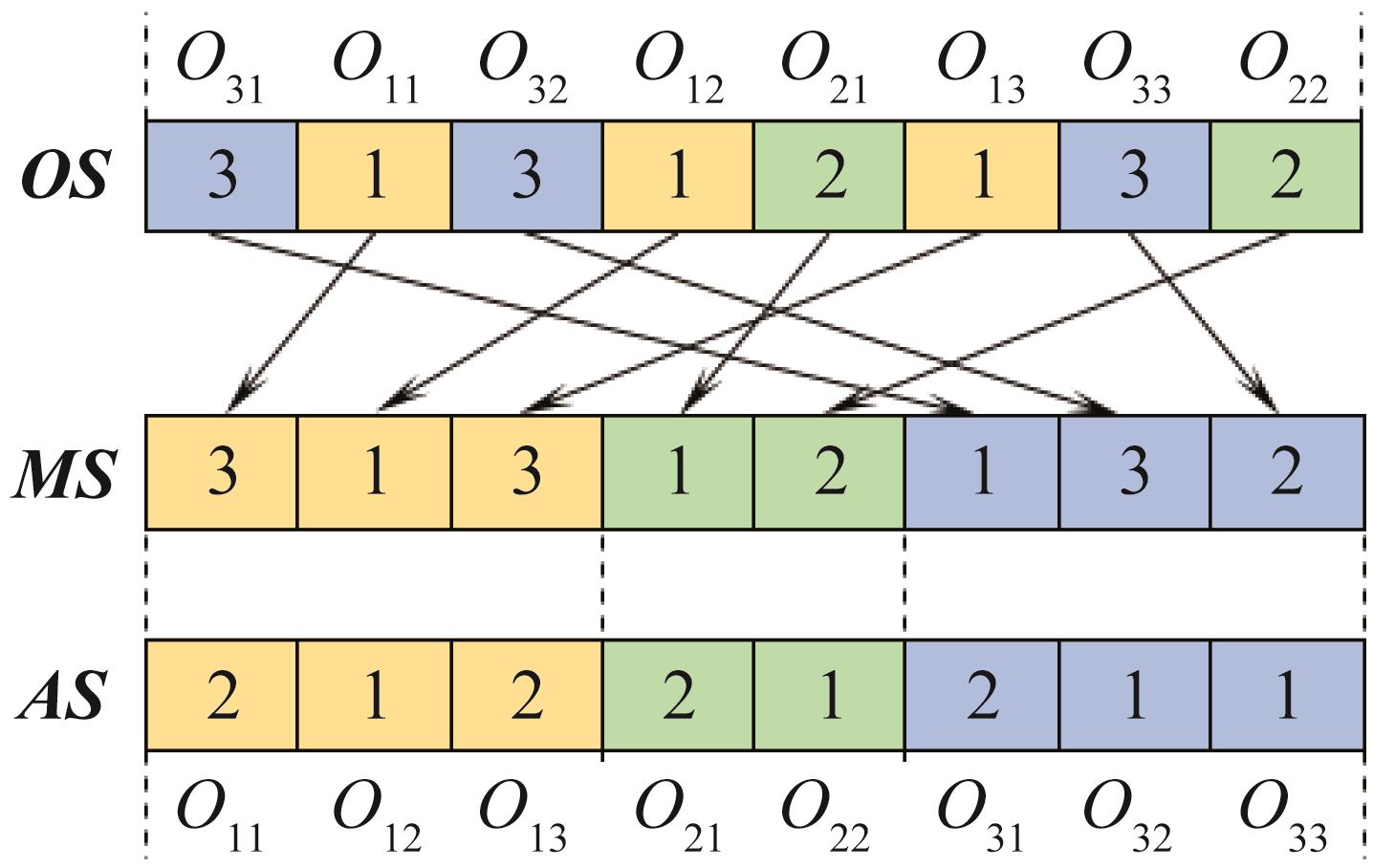
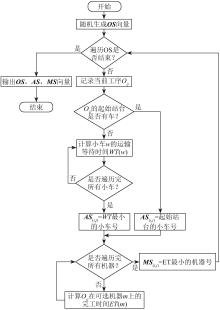
Fig. 2
Heuristic initialization method
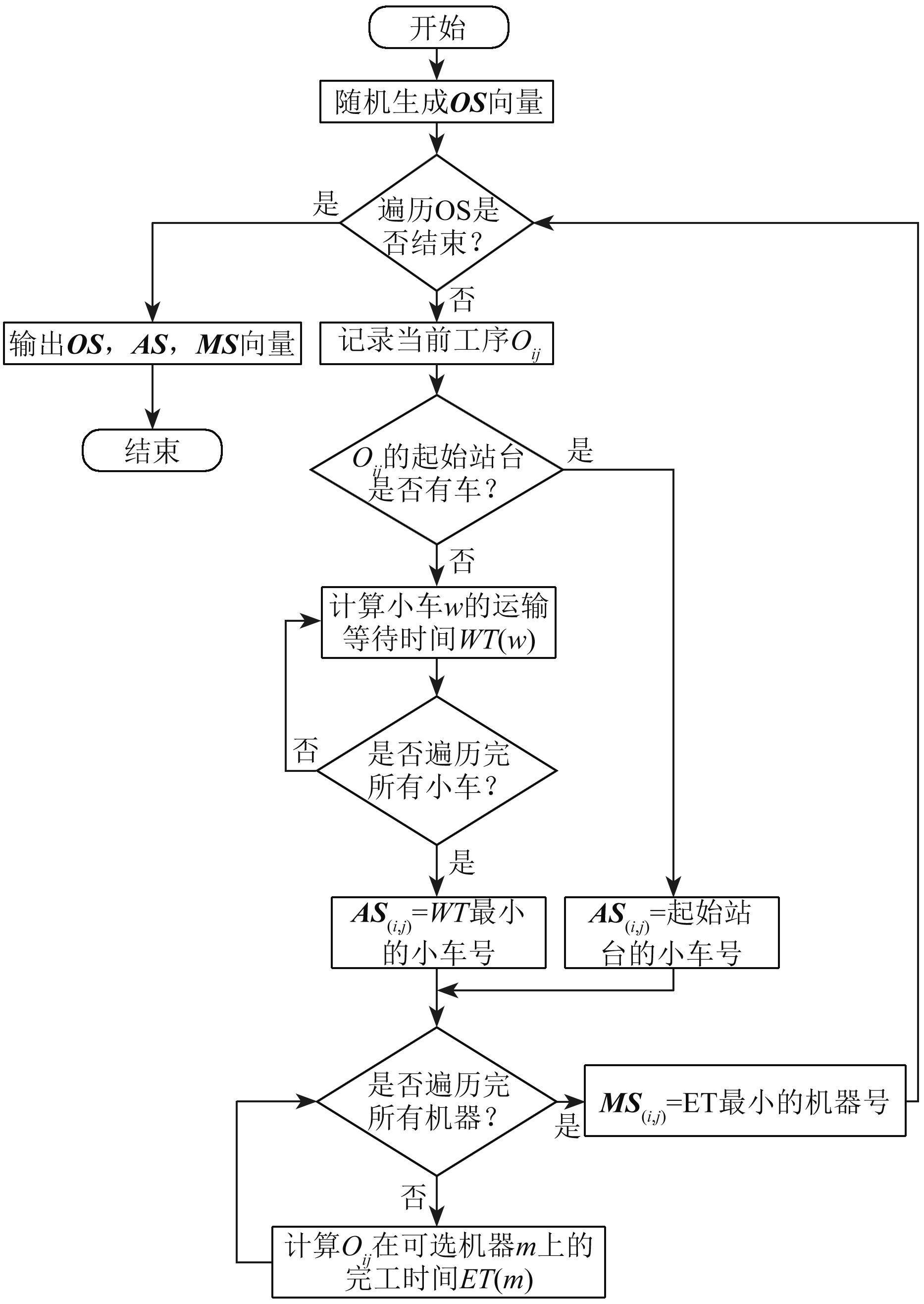

Fig. 3
F1 operator operation mode
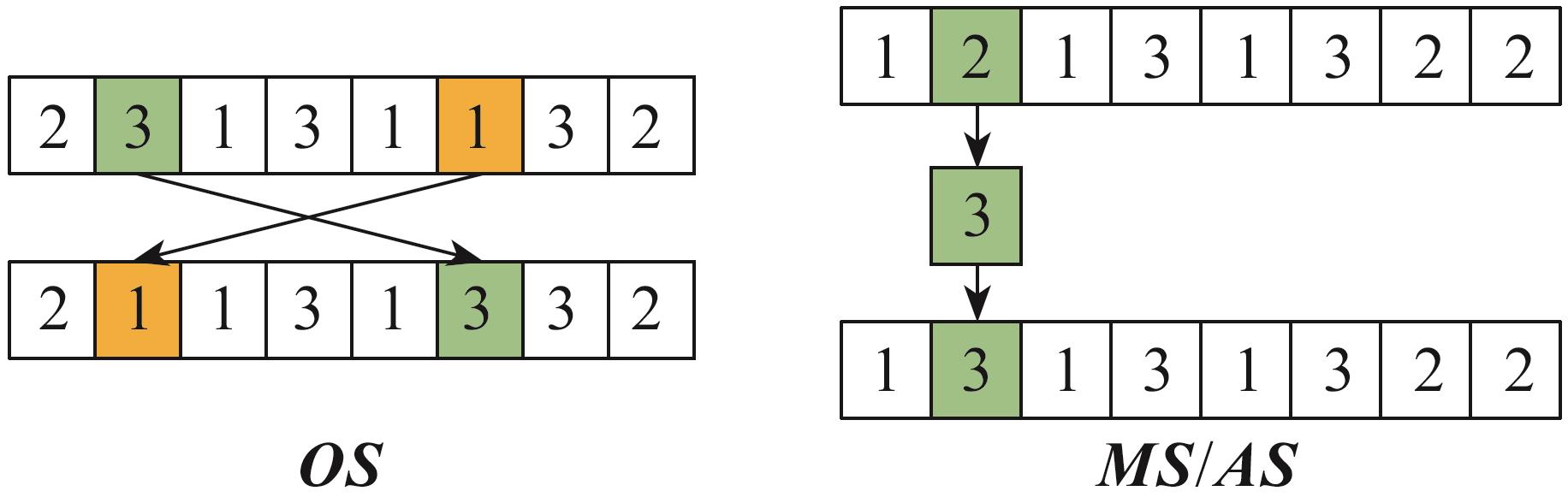

Fig. 4
POX and RPX cross operator
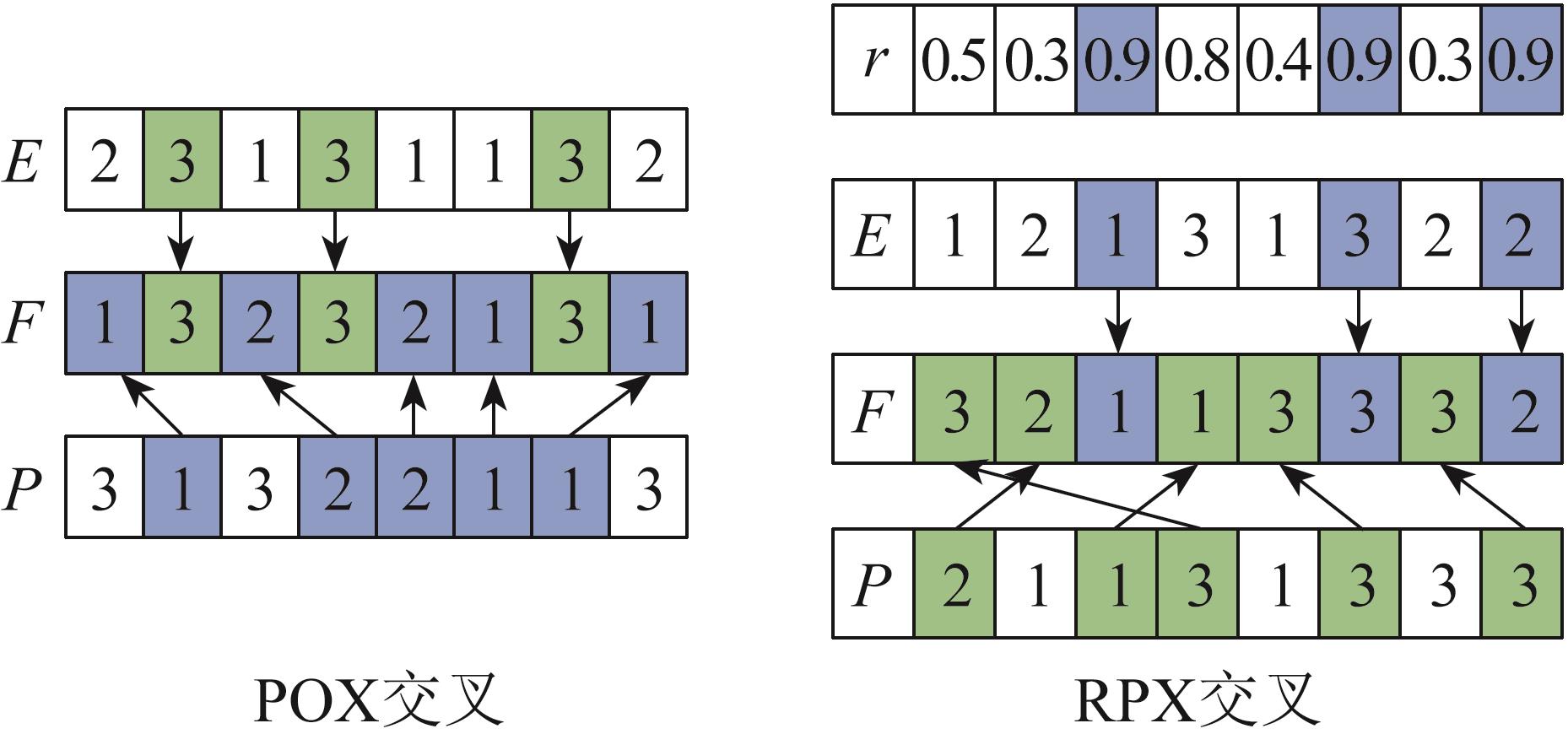
Fig. 5
Algorithm flow chart
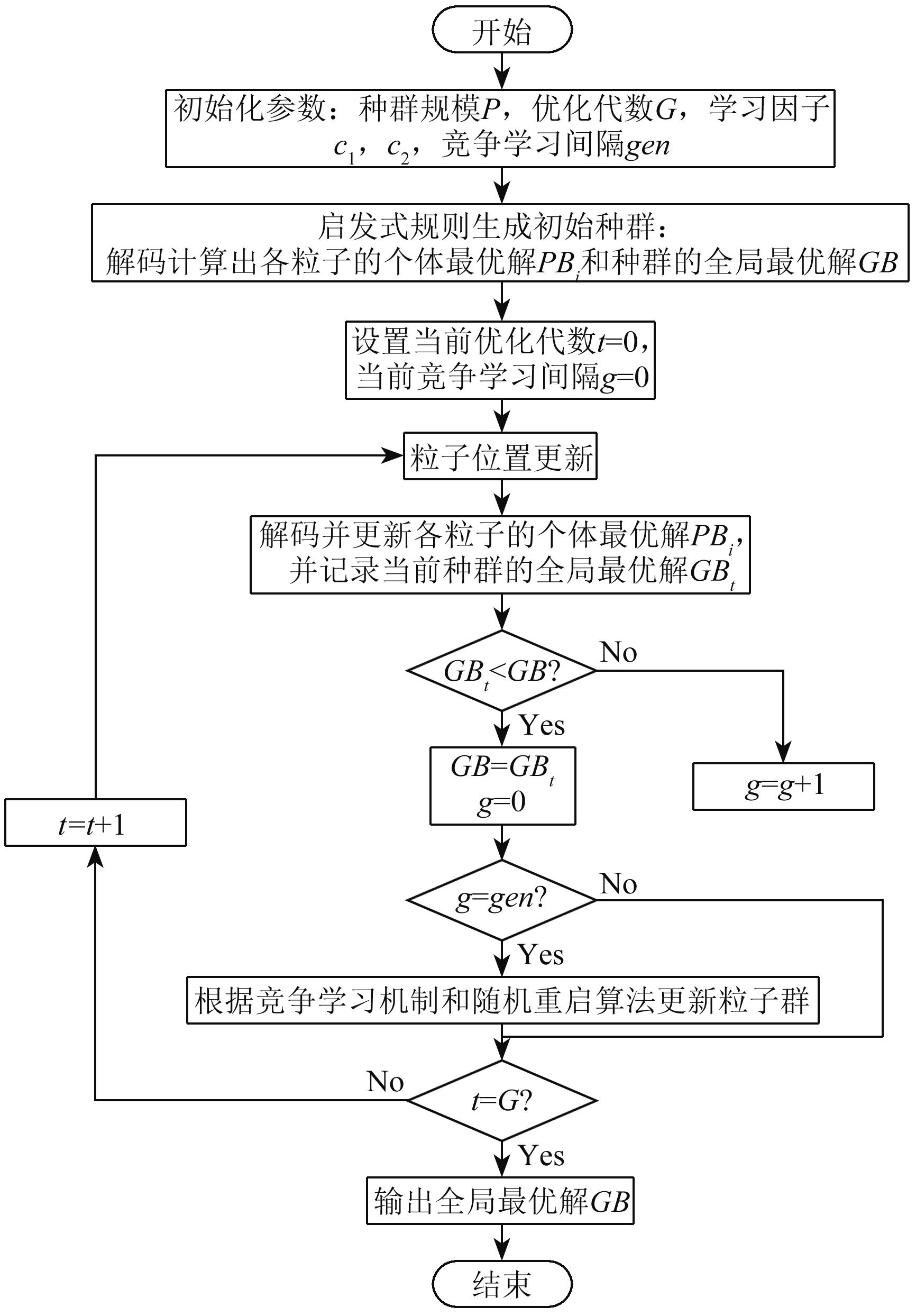
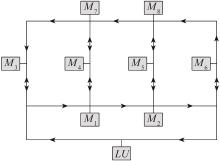
Fig. 6
Workshop layout
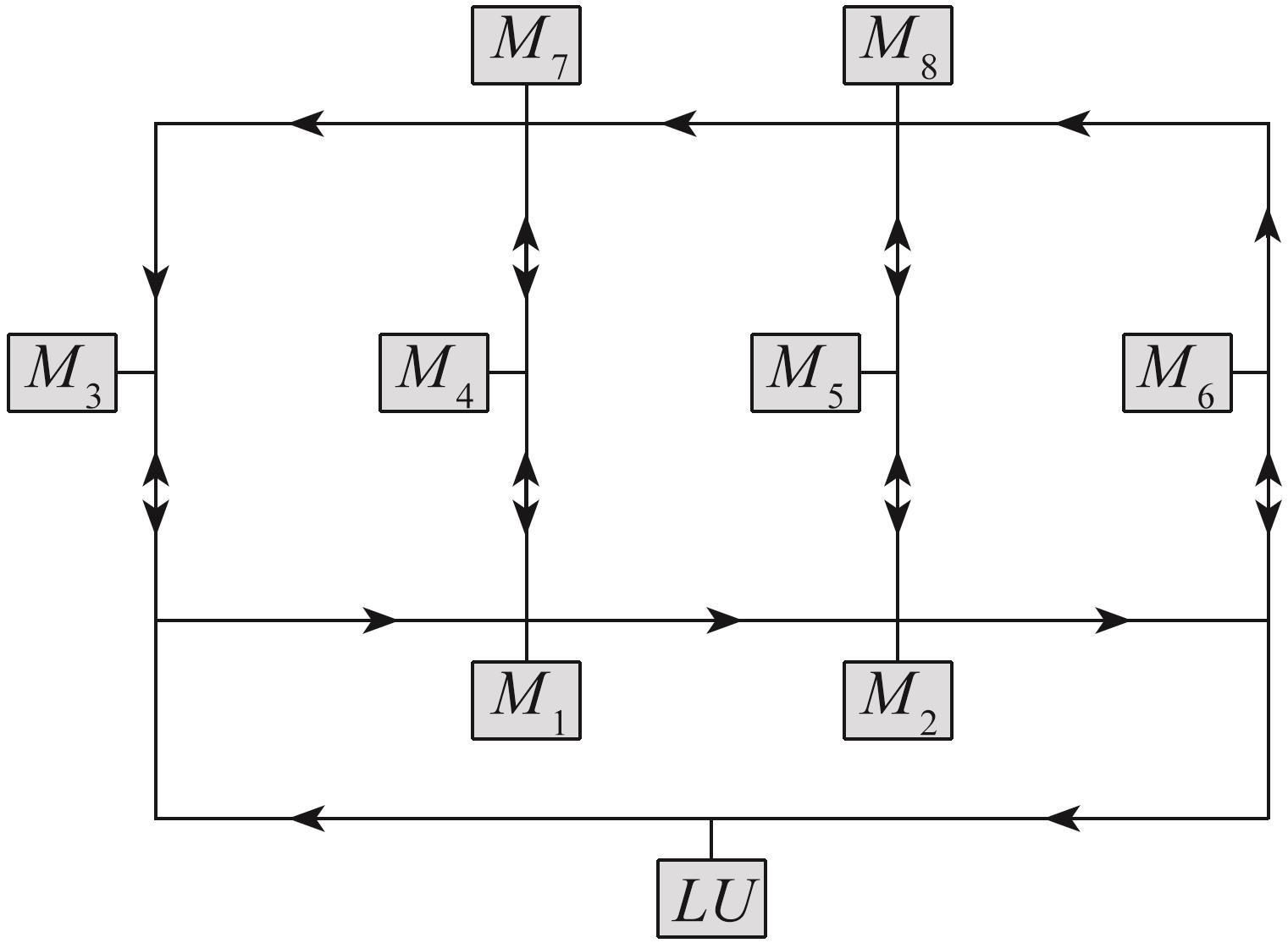
Table 1
Initialization comparison results
| 数据集 | 初始解 | 最优解 | ||
|---|---|---|---|---|
| 随机 | 启发式 | 随机 | 启发式 | |
| FJSP1 | 266.71 | 207.47 | 191.96 | 184.71 |
| FJSP2 | 223.81 | 174.67 | 157.68 | 152.25 |
| FJSP3 | 241.79 | 186.32 | 167.14 | 161.54 |
| FJSP4 | 234.97 | 185.30 | 163.25 | 161.52 |
| FJSP5 | 171.42 | 135.57 | 117.65 | 112.66 |
| FJSP6 | 258.38 | 203.79 | 188.75 | 183.08 |
| FJSP7 | 229.74 | 178.48 | 162.70 | 159.80 |
| FJSP8 | 327.09 | 244.87 | 235.71 | 229.19 |
| FJSP9 | 275.10 | 213.96 | 194.65 | 185.80 |
| FJSP10 | 330.92 | 253.54 | 243.98 | 237.05 |
| 提升效率 | 57.58 | 5.59 | ||
Fig. 7
Convergence graph for different initialization of instance FJSP5
Table 2
Algorithm comparison results
| 数据集 | SBN | Tabu | DPSO | HDPSO | ||
|---|---|---|---|---|---|---|
| Best | Mean | Best | Mean | |||
| FJSP1 | 156 | 160 | 152 | 156.2 | 148 | 154.4 |
| FJSP2 | 124 | 128 | 126 | 132.0 | 118 | 130.4 |
| FJSP3 | 140 | 162 | 132 | 137.4 | 130 | 135.4 |
| FJSP4 | 132 | 126 | 132 | 138.2 | 126 | 133.4 |
| FJSP5 | 96 | 100 | 96 | 97.8 | 94 | 95.2 |
| FJSP6 | 148 | 152 | 154 | 158.2 | 150 | 154.0 |
| FJSP7 | 132 | 132 | 126 | 134.8 | 126 | 131.0 |
| FJSP8 | 191 | 188 | 188 | 192.5 | 186 | 190.3 |
| FJSP9 | 154 | 162 | 154 | 157.8 | 152 | 154.8 |
| FJSP10 | - | - | 192 | 199.2 | 190 | 196.8 |

Fig. 8
Scheduling Gantt chart of instance FJSP5
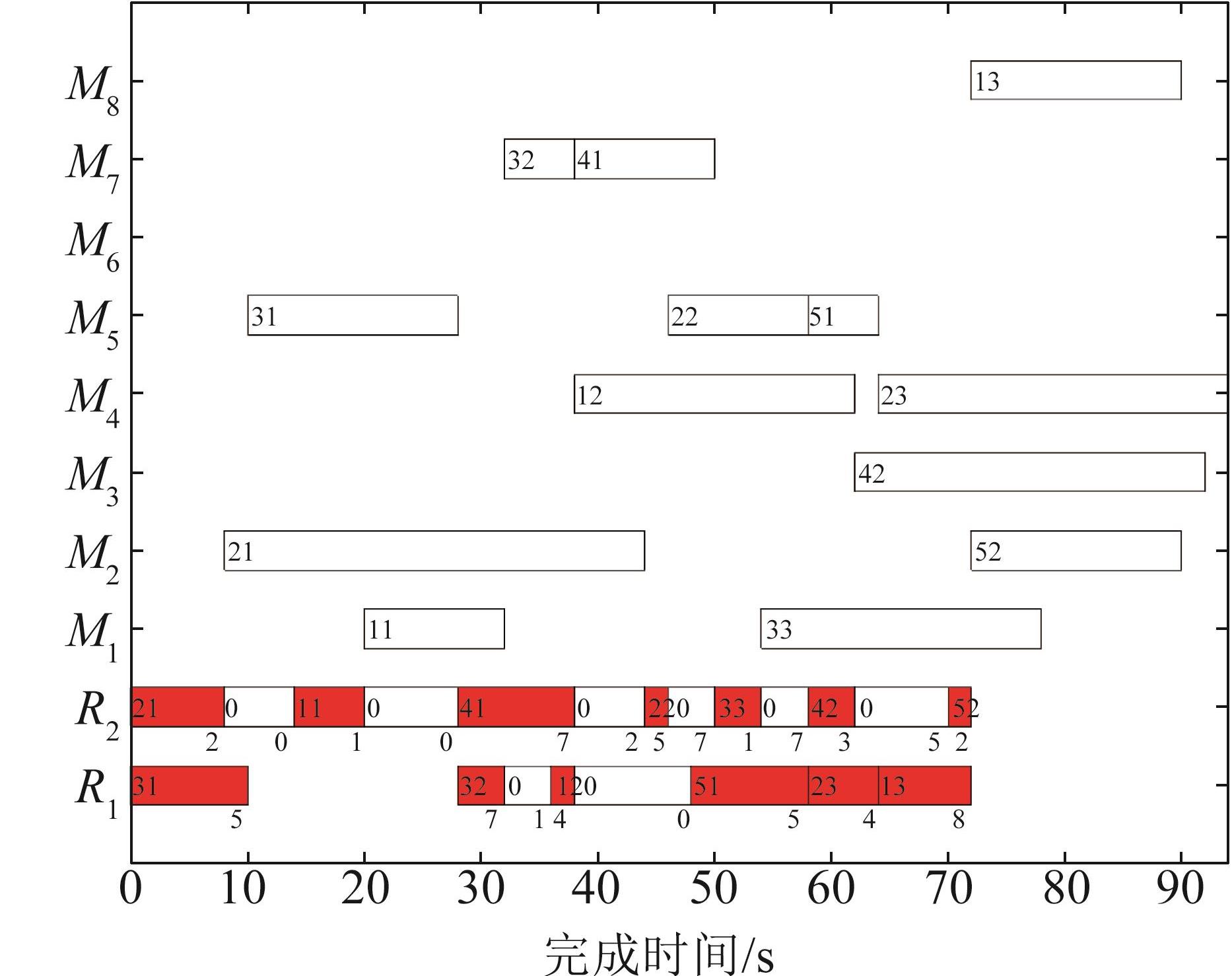
Table 3
Experimental results of KACEM dataset
| 数据集 | Tran0~1 | Tran1~5 | ||
|---|---|---|---|---|
| DPSO | HDPSO | DPSO | HDPSO | |
| 8×8 | 17.63 | 16.46 | 28.00 | 24.23 |
| 10×10 | 9.08 | 8.46 | 15.79 | 12.00 |
| 15×10 | 19.52 | 18.19 | 50.62 | 28.50 |
Table 4
Experimental results of KACEM dataset
| 数据集 | W | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| FJSP1 | 214 | 148 | 132 | 132 | 132 |
| FJSP2 | 180 | 118 | 116 | 114 | 114 |
| FJSP3 | 190 | 130 | 122 | 120 | 120 |
| FJSP4 | 198 | 126 | 112 | 104 | 102 |
| FJSP5 | 142 | 94 | 94 | 94 | 94 |
| FJSP6 | 202 | 150 | 138 | 134 | 134 |
| FJSP7 | 210 | 126 | 108 | 100 | 94 |
| FJSP8 | 250 | 186 | 178 | 178 | 178 |
| FJSP9 | 206 | 152 | 144 | 134 | 134 |
| FJSP10 | 264 | 190 | 178 | 168 | 168 |
| 提升效率 | 63.6 | 9.8 | 4.4 | 0.8 | |
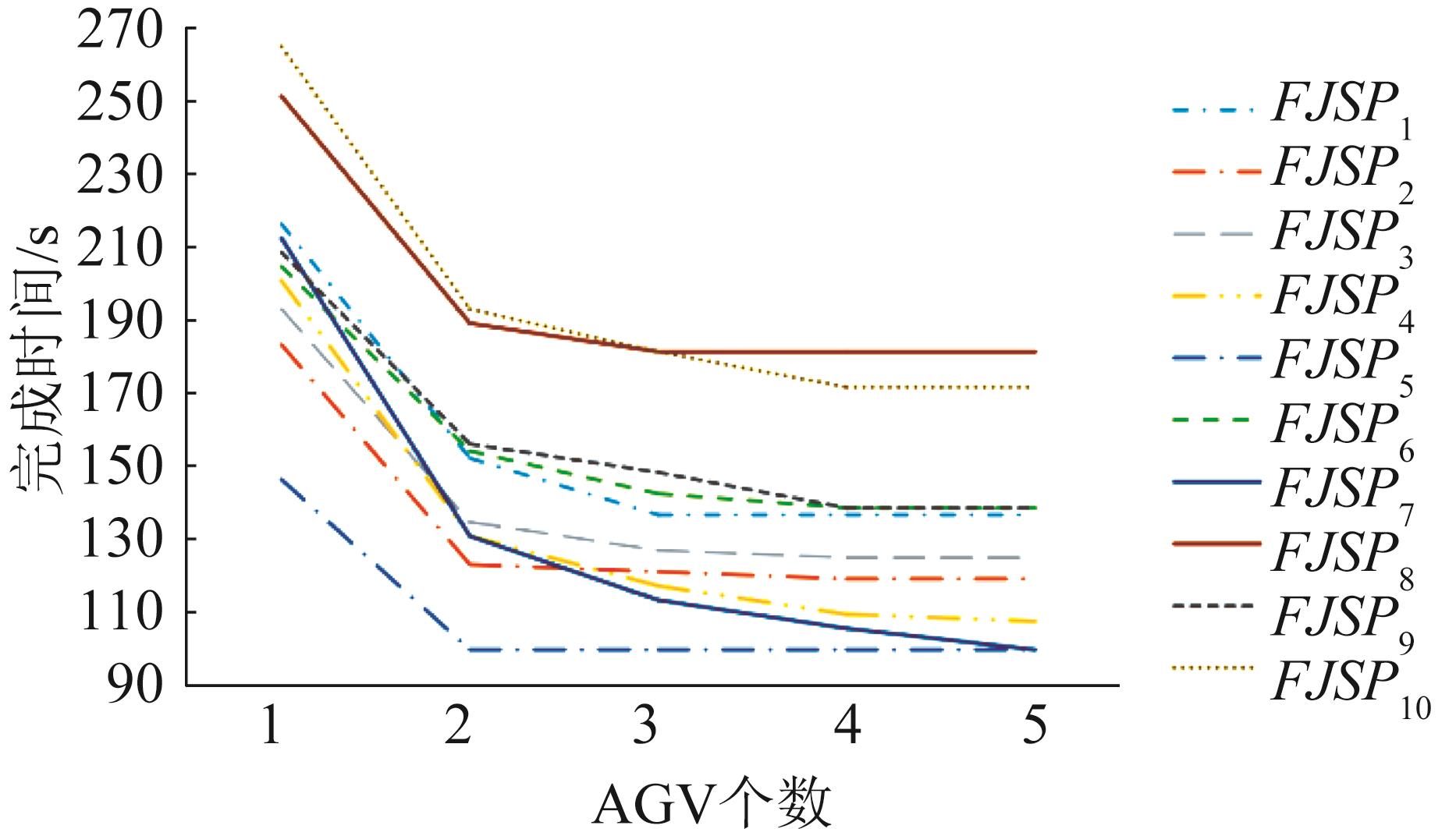
Fig. 9
Makespan VS. the number of AGV makespan
| 1 | 杨智飞, 苏春, 胡祥涛, 等. 面向智能生产车间的多AGV系统多目标调度优化[J]. 东南大学学报(自然科学版), 2019, 49(6): 1033-1040. |
| Yang Zhifei, Su Chun, Hu Xiangtao, et al. Multi-Objective Scheduling Optimization for Multi-AGV Systems of Intelligent Jobshop[J]. Journal of Southeast University(Natural Science Edition), 2019, 49(6): 1033-1040. | |
| 2 | 魏永来, 龙伟, 李炎炎, 等. 基于混合禁忌蝙蝠算法的AGV物料配送调度研究[J]. 组合机床与自动化加工技术, 2018, 1(11): 145-149. |
| Wei Yonglai, Long Wei, Li Yanyan, et al. Research on AGV Material Delivery Scheduling Problem Based on Hybrid Tabu Bat Algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2018, 1(11): 145-149. | |
| 3 | 刘二辉, 姚锡凡, 陶韬, 等. 基于改进花授粉算法的共融AGV作业车间调度[J]. 计算机集成制造系统, 2019, 25(9): 2219-2236. |
| Liu Erhui, Yao Xifan, Tao Tao, et al. Improved Flower Pollinaton Algorithm for Job Shop Scheduling Problems Integrated with AGVs[J]. Computer Integrated Manufacturing Systems, 2019, 25(9): 2219-2236. | |
| 4 | 肖海宁, 楼佩煌, 严伟国, 等. 柔性作业车间中机床与自动引导车在线调度方法[J]. 农业机械学报, 2013, 44(4): 280-286. |
| Xiao Haining, Lou Peihuang, Yan Weiguo, et al. On-Line Scheduling Method for Simultaneous Scheduling of Machines and Automated Guided Vehicles in Flexible Job Shop[J]. Transactions of the Chinese Societr for Agricultural Machinery, 2013, 44(4): 280-286. | |
| 5 | Zeng Chengkuan, Tang Jiafu, Yan Chongjun. Scheduling of no Buffer Job Shop Cells with Blocking Constraints and Automated Guided Vehicles[J]. Applied Soft Computing (S1568-4968), 2014, 28(8): 1033-1046. |
| 6 | Houssem Eddine Nouri, Olfa Belkahla Driss, Ghédira Khaled. Simultaneous Scheduling of Machines and Transport Robots in Flexible Job Shop Environment Using Hybrid Metaheuristics Based on Clustered Holonic Multiagent Model[J]. Computers & Industrial Engineering (S0360-8352), 2016, 24(2): 488-501. |
| 7 | Mousavi Maryan, Hwa Jen Yap, Siti Nurmaya Musa, et al. Multi-Objective AGV Scheduling in an FMS Using a Hybrid of Genetic Algorithm and Particle Swarm Optimization[J]. PLoS One (S1932-6203), 2017, 1(3): 1-24. |
| 8 | 杨煜俊, 陈业. 求解柔性机器人车间调度问题的混合蚁群算法[J]. 计算机工程与应用, 2018, 54(13): 160-167. |
| Yang Yujun, Chen Ye. Hybrid Ant Colony Optimization for Flexible Robotic Manufacturing Cell Scheduling Problem[J]. Computer Engineering and Applications, 2018, 54(13): 160-167. | |
| 9 | 陆远, 冯睽睽, 胡莹. 单个AGV多个搬运请求的调度算法研究[J]. 组合机床与自动化加工技术, 2019, 1(2): 157-160. |
| Lu Yuan, Feng Kuikui, Hu Ying. An Automated Guided Vehicle Deals with Scheduling Algorithm for Multiple Transport Requests[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2019, 1(2): 157-160. | |
| 10 | Heger Jens, Voß Thomas. Dynamic Priority Based Dispatching of AGVs in Flexible Job Shops[J]. Procedia CIRP (S2212-8271), 2019, 79: 445-449. |
| 11 | Chawla V K, Chanda A K, Angra Surjit. Efect of Natureinspired Algorithms and Hybrid Dispatching Rules on the Performance of Automatic Guided Vehicles in the Fexible Manufacturing System[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering (S1678-5878), 2019, 41(9): 390-406. |
| 12 | 李广博, 于东, 胡毅. 基于变邻域遗传算法的离散制造物料配送调度优化[J]. 组合机床与自动化加工技术, 2019, 1(11): 152-155. |
| Li Guangbo, Yu Dong, Hu Yi. Distribution Scheduling Optimization of Discrete Manufacturing Materials Based on Variable Neighborhood Genetic Algorithms[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2019, 1(11): 152-155. | |
| 13 | 徐云琴, 叶春明, 曹磊. 含有AGV的柔性车间调度优化研究[J]. 计算机应用研究, 2018, 35(11): 3271-3275. |
| Xu Yunqin, Ye Chunming, Cao Lei. Research on Flexible Job-Shop Scheduling Problem with AGV Constraints[J]. Application Research of Computers, 2018, 35(11): 3271-3275. | |
| 14 | Bilge Umit, Ulusoy Gunduz. A Time Window Approach to Simultaneous Scheuling of Machines Ang Material Handling System in an FMS[J]. Operations Research (S4306-1058), 1995, 43(6): 1058-1070. |
| 15 | Fethi Achouri, Mehdi Souier. The Effect of AGVs Number on a Flexible Manufacturing System[C]// ICAAID: The 3rd International Conference on Applied Automation and Industrial Diagnostics. Piscataway, NJ. USA: IEEE, 2019. |
| 16 | 田旻, 张光军, 刘人境. 粒子群遗传混合算法求解考虑运输时间的FJSP[J]. 运筹与管理, 2019, 28(4): 78-88. |
| Tian Min, Zhang Guangjun, Liu Renjing. Solve FJSP Considering Transport Time Via Particle Swarm Genetic Hybrid Algorithm[J]. Operations Research and Management Science, 2019, 28(4): 78-88. | |
| 17 | 张静, 王万良, 徐新黎, 等. 基于改进粒子群算法求解柔性作业车间批量调度问题[J]. 控制与决策, 2012, 27(4): 513-518. |
| Zhang Jing, Wang Wanliang, Xu Xinli, et al. Improved Particle Swarm Algorithm for Batch Splitting Flexible Job Shop Scheduling[J]. Control and Decision, 2012, 27(4): 513-518. | |
| 18 | 李小华. 基于粒子群算法的车间作业调度研究[D]. 武汉: 武汉科技大学, 2009. |
| Li Xiaohua.Research on Job-Shop Scheduling Problem Based on Particle Swarm Optimization Algorithom[D]. Wuhan: Wuhan University of Science and Technology, 2009. | |
| 19 | 刘明, 董明刚, 敬超. 基于定期竞争学习的多目标粒子群优化算法[J]. 计算机应用, 2019, 39(2): 330-335. |
| Liu Ming, Dong Minggang, Jing Chao. Scheduled Competition Learning Based Multi-Objective Particle Swarm Optimization Algorithm[J]. Journal of Computer Applications, 2019, 39(2): 330-335. | |
| 20 | Deroussi L, Norre S. Simultaneous Scheduling of Machines and Vehicles for the Flexible Job Shop Problem[C]// International Conference on Metaheuristics and Nature Inspired Computing. Heidelberg, Germany: Springer, 2010: 1-2. |
| 21 | Jarboui Bassem, Siarry Patrick, Teghem Jacques. Metaheuristics for Production Scheduling[M]. New Jersey USA: John Wiley & Sons, Inc., 2013: 465-493. |
| 22 | Qiao Zhang, Maniera Hervé, Manier Marie-Ange. A Modified Shifting Bottleneck Heuristic and disjunctive Graph for Job Shop Scheduling Problems with Transportation Constraints[J]. International Journal of Production Research (S0020-7543), 2014, 52(12): 985-1002. |
| 23 | Huang Xiaobao, Yang Lixi. A Hybrid Genetic Algorithm for Multi-Objective Flexible Job Shop Scheduling Problem Considering Transportation Time[J]. International Jour-nal of Intelligent Computing and Cybernetics (S1756-378X), 2019,12(2): 154-174. |
| [1] | Li Xiang, Ren Xiaoyu, Zhou Yongbing, Zhang Jian. Research on Flexible Integrated Scheduling Under Stochastic Processing Times Based on Improved D3QN Algorithm [J]. Journal of System Simulation, 2025, 37(2): 474-486. |
| [2] | Ren Liang, Zhou Zerong, Ma Yunfeng. Optimization of Order Picking and Sorting Coordintion in “Goods-to-person” System [J]. Journal of System Simulation, 2025, 37(12): 3128-3139. |
| [3] | Jiang Quan, Wei Jingxuan. Real-time Scheduling Method for Dynamic Flexible Job Shop Scheduling [J]. Journal of System Simulation, 2024, 36(7): 1609-1620. |
| [4] | Shi Zhihao, Shen Haihui. Simulation Platform of AGV System Scheduling Algorithms in Uncertain Environment [J]. Journal of System Simulation, 2024, 36(2): 385-404. |
| [5] | Li Jian, Li Huankun, He Pengbo, Wang Huabei, Xu Liping, He Kui. Flexible Job Shop Scheduling Method Based on Collaborative Agent Reinforcement Learning Algorithm [J]. Journal of System Simulation, 2024, 36(11): 2699-2711. |
| [6] | Xu Yigang, Chen Yong, Wang Chen, Peng Yunxian. Improving NSGA-III Algorithm for Solving High-dimensional Many-objective Green Flexible Job Shop Scheduling Problem [J]. Journal of System Simulation, 2024, 36(10): 2314-2329. |
| [7] | Zhang Tianrui, Niu Huiyuan, Xie Wei. Integrated Scheduling Simulation Based on Improved Moth Flame Optimizer [J]. Journal of System Simulation, 2023, 35(10): 2170-2181. |
| [8] | Jianlin Fu, Guofu Ding, Jian Zhang, Haifan Jiang, Peipei Guo. Multi-Objective Optimization Configuration of AGV System Based on Response Surface and NSGA-II [J]. Journal of System Simulation, 2022, 34(5): 994-1002. |
| [9] | Hongliang Zhang, Renman Ding, Gongjie Xu. Energy-Efficient Scheduling of Multi-objective Flexible Job Shop Considering Interval Processing Time [J]. Journal of System Simulation, 2022, 34(09): 1976-1987. |
| [10] | Chen Kui, Bi Li. Research on FJSP of Improved Particle Swarm Optimization Algorithm Considering Transportation Time [J]. Journal of System Simulation, 2021, 33(4): 845-853. |
| [11] | Zhang Xiang, Wang Yan, Ji Zhicheng. Research on Dynamic Flexible Job Shop Scheduling Problem Based on Dynamic Interaction Layer [J]. Journal of System Simulation, 2020, 32(11): 2129-2137. |
| [12] | Li Ke, Wang Yan, Ji Zhicheng. Research on FJSP Problem of Invasive Weed Optimization Based on Hybrid Strategy [J]. Journal of System Simulation, 2018, 30(5): 1918-1926. |
| [13] | Zhang Xin, Li Ke, Yan Dahu, Ji Zhicheng. Improved Intrusion Weed Algorithm for Solving Flexible Job Shop Scheduling Problem [J]. Journal of System Simulation, 2018, 30(11): 4469-4476. |
| [14] | Chen Chao, Wang Yan, Yan Dahu, Ji Zhicheng. Research on Dynamic Flexible Job Shop Scheduling Problem for Energy Consumption [J]. Journal of System Simulation, 2017, 29(9): 2168-2175. |
| [15] | Zhang Xiaoxing, Wang Yan, Yan Dahu, Ji Zhicheng. Improved Shuffled Frog-Leaping Algorithm for Solving Flexible Job Shop Scheduling Problem [J]. Journal of System Simulation, 2017, 29(9): 2093-2099. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
