

系统仿真学报 ›› 2025, Vol. 37 ›› Issue (3): 803-821.doi: 10.16182/j.issn1004731x.joss.23-1392
• 论文 • 上一篇
金煦1, 莫愿斌1,2
收稿日期:2023-11-16
修回日期:2024-01-26
出版日期:2025-03-17
发布日期:2025-03-21
通讯作者:
莫愿斌
第一作者简介:金煦(1998-),女,硕士生,研究方向为系统优化与控制。
基金资助:Jin Xu1, Mo Yuanbin1,2
Received:2023-11-16
Revised:2024-01-26
Online:2025-03-17
Published:2025-03-21
Contact:
Mo Yuanbin
摘要:
针对机器人导航系统设计寻优路径中存在局部最优和过早收敛的问题,提出一种基于山地瞪羚优化器(mountain gazelle optimizer,MGO)的多策略混合山地瞪羚优化器(multi-strategy hybrid MGO,HMGO)改进算法。利用准反向学习策略优化种群初始化以确保其广泛性,引入动态自适应密度因子调整优化机制参数,结合算术优化策略和正余弦思想进行随机扰动。通过消融实验、13个基准测试函数以及对二维和三维空间机器人路径规划问题的求解进行仿真实验,结果表明:HMGO 在效率和稳定性上有优势且该算法求解此问题是有效的。
中图分类号:
金煦,莫愿斌 . 多策略混合山地瞪羚优化器在机器人路径规划问题中的应用[J]. 系统仿真学报, 2025, 37(3): 803-821.
Jin Xu,Mo Yuanbin . Multi-strategy Hybrid Mountain Gazelle Optimizer for Robot Path Planning[J]. Journal of System Simulation, 2025, 37(3): 803-821.

图1
山地瞪羚优化器流程
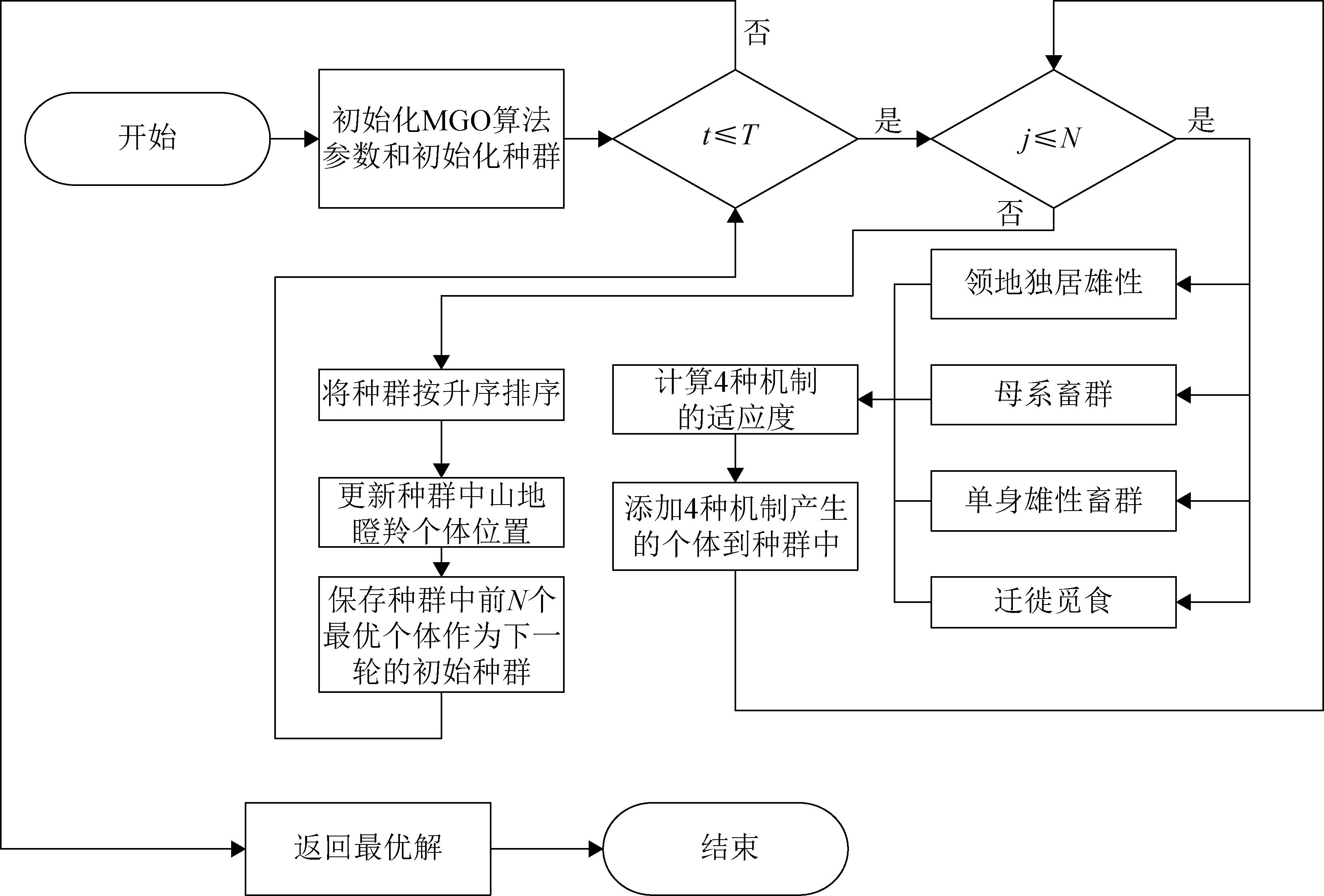
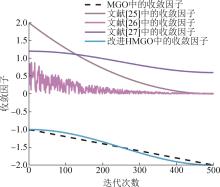
图2
收敛因子曲线图
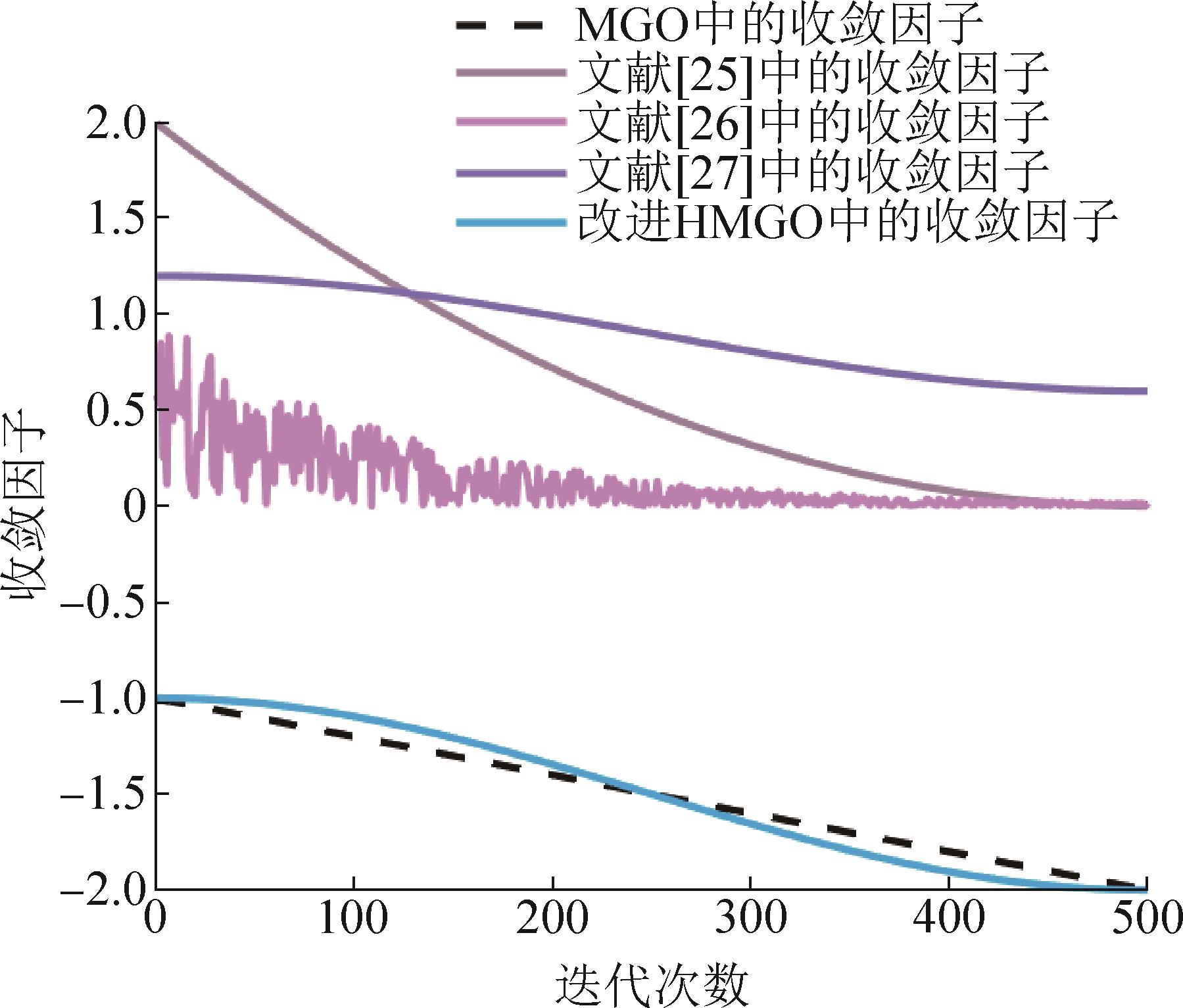
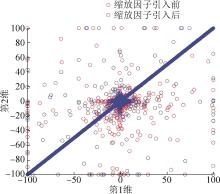
图3
新种群对比图
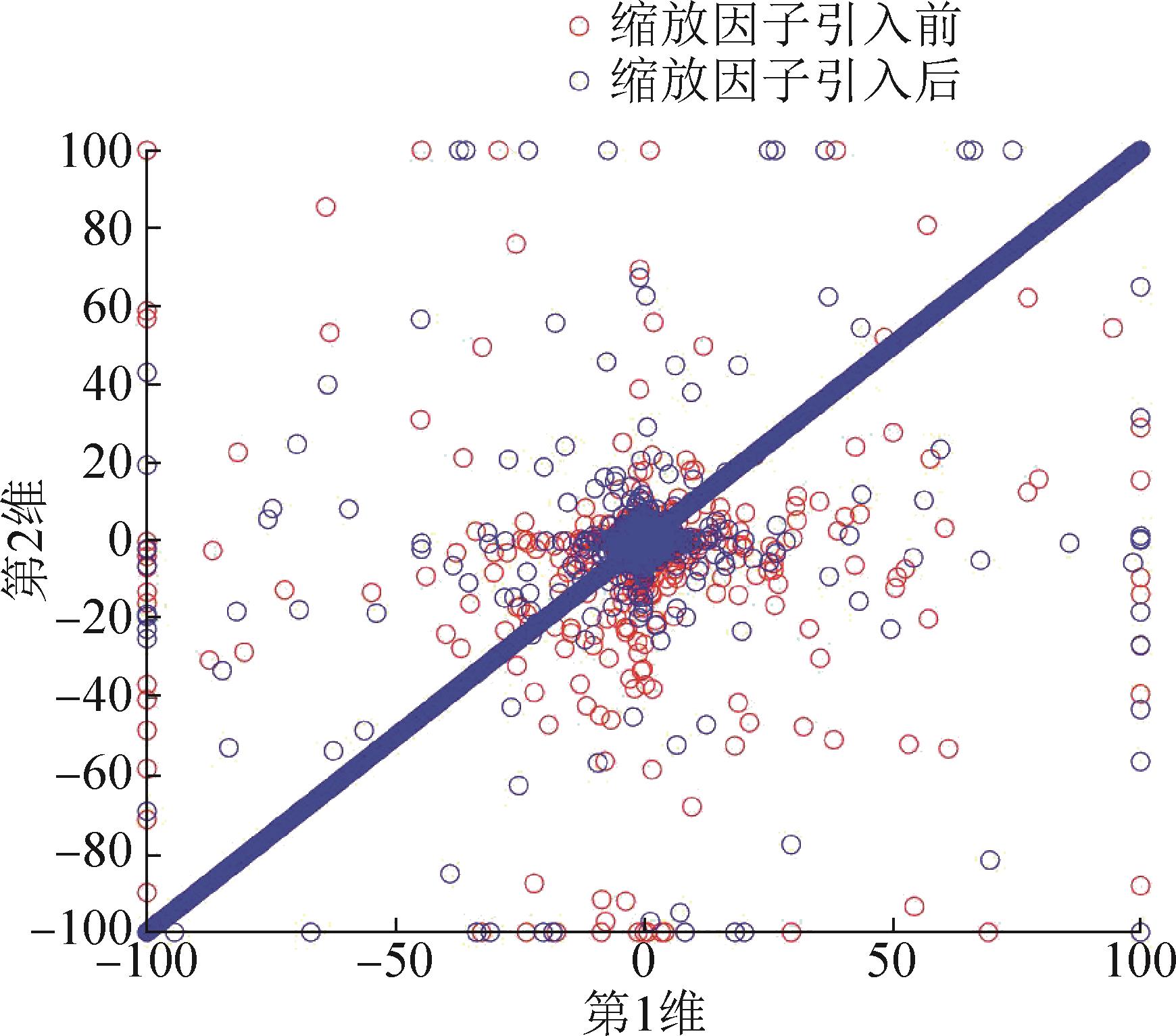
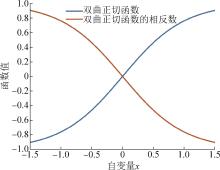
图4
双曲正切函数及其相反数函数
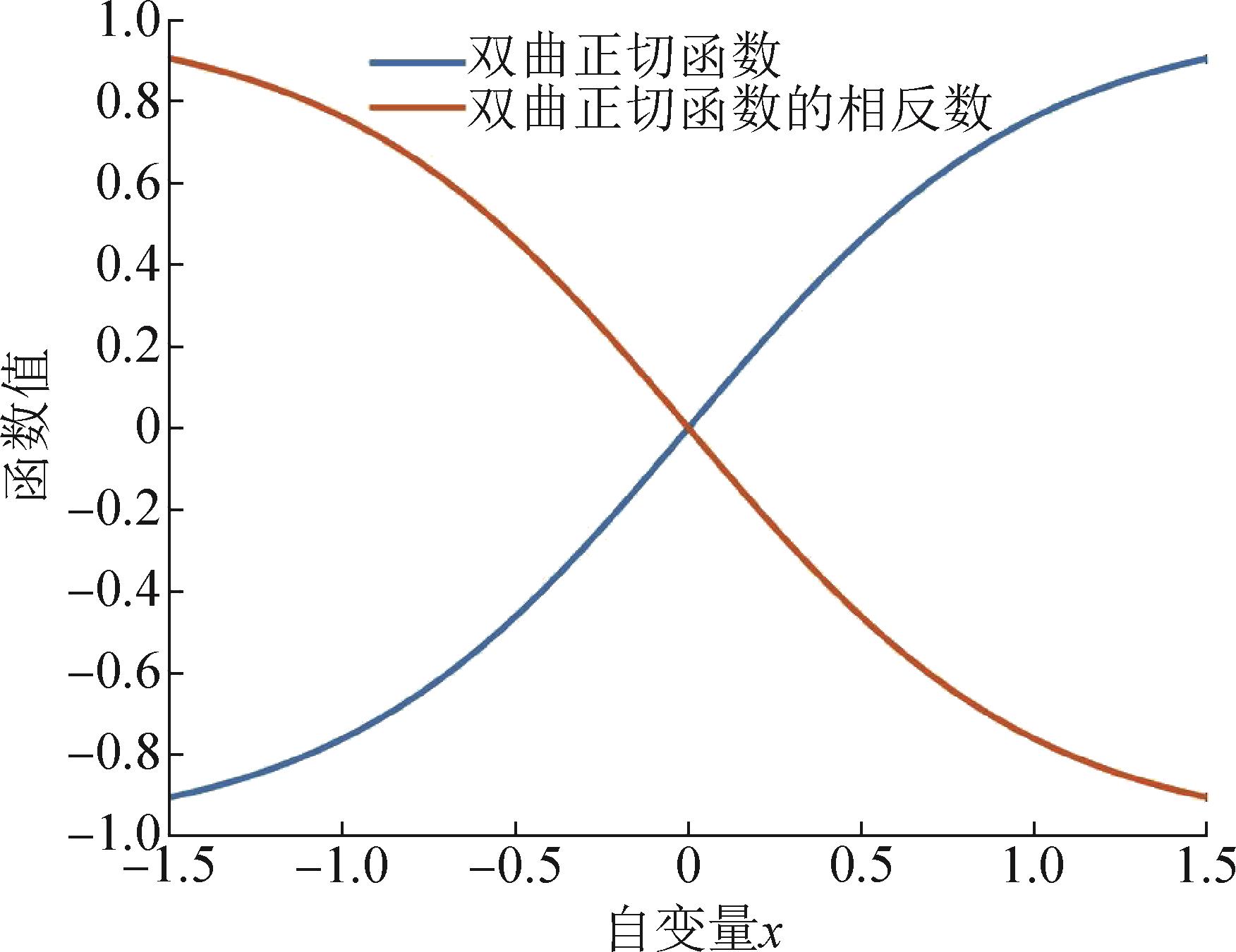

图5
缩放因子函数及其过渡函数
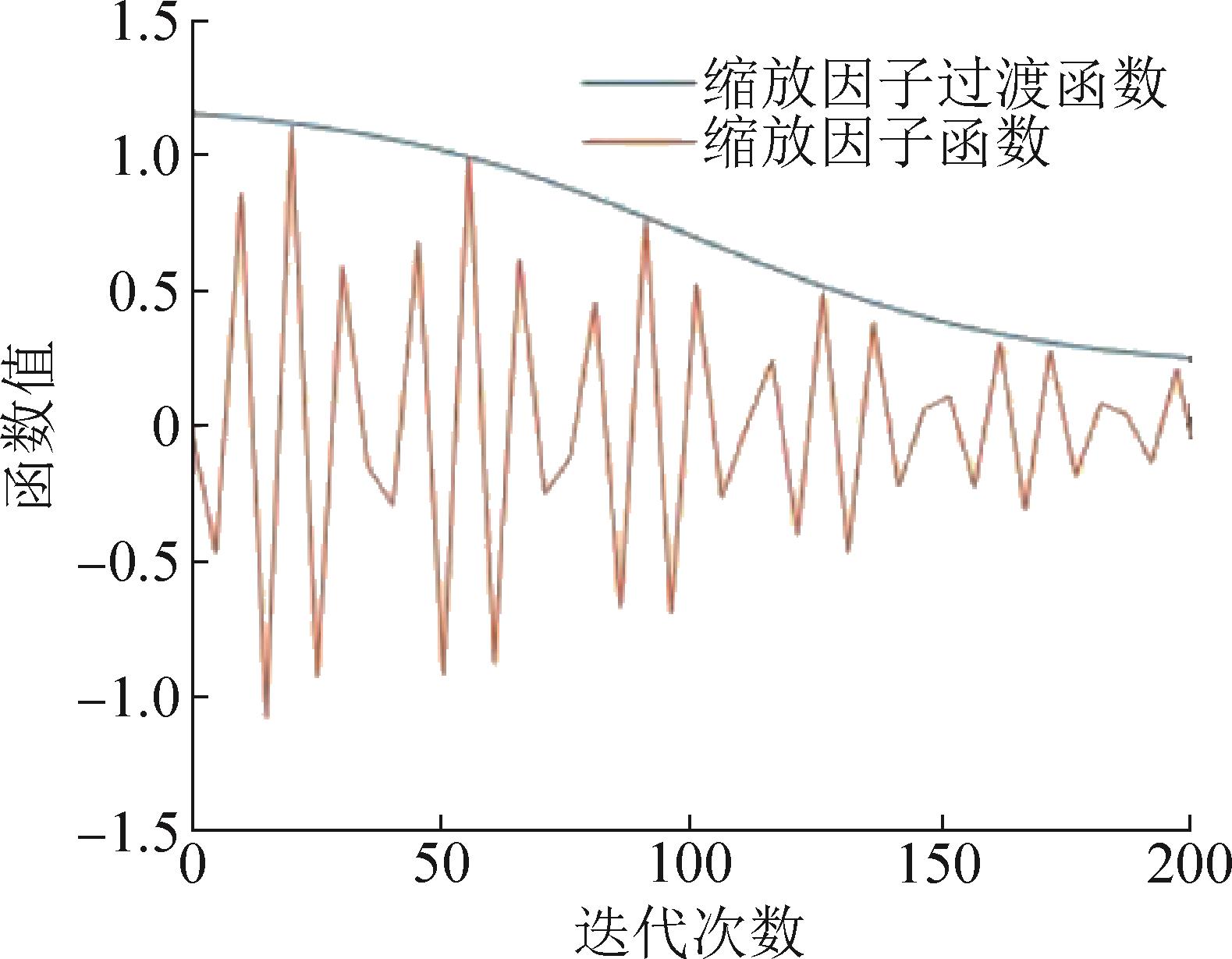
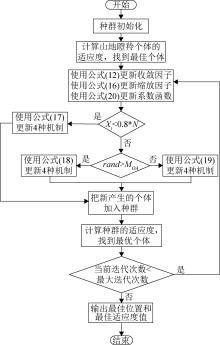
图6
HMGO流程
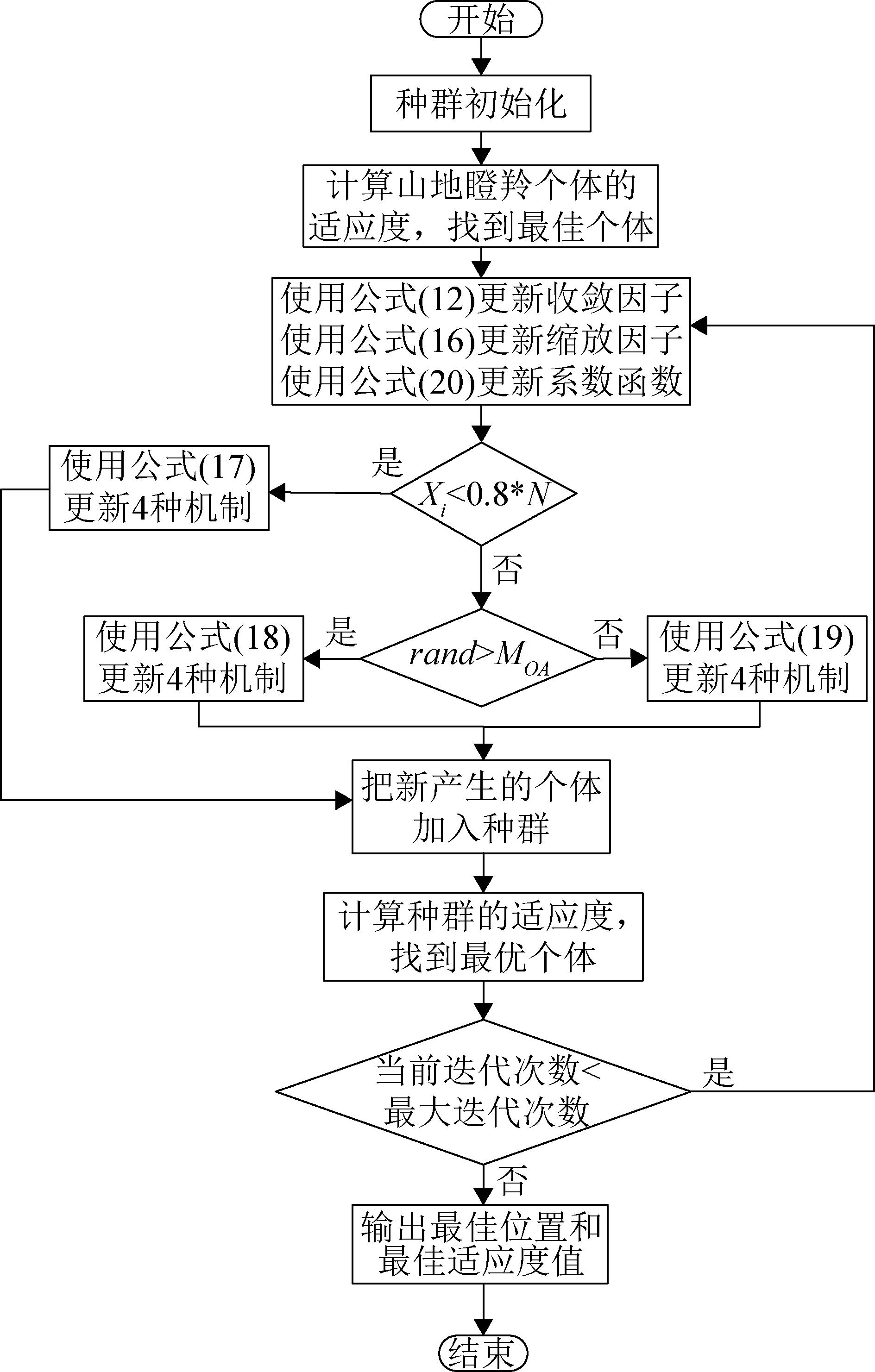
表1
描述对照算法
| 算法 | 功能描述 |
|---|---|
| MGO | 标准山地瞪羚优化器 |
| MGO1 | HMGO去掉2.1节初始化种群策略 |
| MGO2 | HMGO去掉2.2节动态自适应密度因子 |
| MGO3 | HMGO去掉2.3节缩放因子策略改善相对位移 |
| MGO4 | HMGO去掉2.4节混合改进的算术优化算法 |
| HMGO | 混合多种策略改进的山地瞪羚优化器 |
表2
消融实验结果
| 函数 | 指标 | MGO | MGO1 | MGO2 | MGO3 | MGO4 | HMGO |
|---|---|---|---|---|---|---|---|
| F1 | 均值 | 3.177 | 5.910 | 0 | 0 | 1.196 | 0 |
| 标准差 | 1.251 | 0 | 0 | 0 | 4.292 | 0 | |
| F2 | 均值 | 1.316 | 0 | 0 | 0 | 1.869 | 0 |
| 标准差 | 3.531 | 0 | 0 | 0 | 7.750 | 0 | |
| F3 | 均值 | 3.934 | 0 | 0 | 0 | 5.941 | 0 |
| 标准差 | 4.421 | 0 | 0 | 0 | 6.552 | 0 | |
| F4 | 均值 | 3.332×10-21 | 0 | 0 | 0 | 1.116×10-36 | 0 |
| 标准差 | 1.111×10-20 | 0 | 0 | 0 | 1.420×10-71 | 0 | |
| F5 | 均值 | 5.575×10-18 | 6.867×10-4 | 5.437×10-4 | 2.193×10-22 | 1.768×10-4 | 3.491×10-4 |
| 标准差 | 9.325×10-34 | 2.278E×10-6 | 7.587E×10-7 | 1.396×10-42 | 6.319×10-8 | 2.827×10-7 | |
| F6 | 均值 | 1.811×10-8 | 3.457×10-9 | 3.874×10-9 | 4.327×10-9 | 8.421×10-9 | 1.665×10-9 |
| 标准差 | 3.690×10-15 | 3.698×10-17 | 2.604×10-16 | 1.667×10-18 | 1.263×10-16 | 9.701×10-18 | |
| F7 | 均值 | 4.539×10-4 | 4.685×10-5 | 4.872×10-5 | 7.807×10-5 | 2.100×10-4 | 4.195×10-5 |
| 标准差 | 1.309×10-7 | 1.139×10-9 | 1.305×10-9 | 3.875×10-9 | 7.905×10-8 | 1.242×10-9 | |
| F8 | 均值 | -1.257×104 | -1.259×104 | -1.259×104 | -1.259×104 | -1.259×104 | -1.260×104 |
| 标准差 | 3.999×10-8 | 2.324×10-7 | 1.709×10-8 | 3.377×10-10 | 1.026×10-9 | 3.382×10-8 | |
| F9 | 均值 | 0 | 0 | 0 | 0 | 0 | 0 |
| 标准差 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F10 | 均值 | 1.717×10-15 | 8.882×10-16 | 8.882×10-16 | 8.883×10-16 | 1.480×10-15 | 8.882×10-16 |
| 标准差 | 2.336×10-30 | 0 | 0 | 0 | 1.814×10-30 | 0 | |
| F11 | 均值 | 0 | 0 | 0 | 0 | 0 | 0 |
| 标准差 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F12 | 均值 | 3.124×10-23 | 2.185×10-8 | 6.220×10-8 | 1.845×10-23 | 7.306×10-9 | 3.060×10-11 |
| 标准差 | 4.954×10-50 | 1.314×10-15 | 8.081×10-15 | 6.545×10-44 | 1.404×10-16 | 2.221×10-17 | |
| F13 | 均值 | 1.958×10-32 | 1.318×10-6 | 7.664×10-7 | 2.435×10-32 | 7.134×10-8 | 3.164×10-7 |
| 标准差 | 3.127×10-64 | 2.828×10-11 | 1.653×10-12 | 1.359×10-65 | 1.761×10-14 | 1.834×10-13 |
表3
13个基准测试函数
| 序号 | 标准测试函数 | 搜索空间 | 最优值 |
|---|---|---|---|
| F1 | Sphere Function | [-100,100] | 0 |
| F2 | Schwefel's Problem 1.2 | [-10,10] | 0 |
| F3 | Quadnc | [-100,100] | 0 |
| F4 | Schwefel's Problem 1.22 | [-100,100] | 0 |
| F5 | Generalized Rosenbrock's Function | [-30,30] | 0 |
| F6 | Step Function | [-100,100] | 0 |
| F7 | Quartic Function i.e. Noise | [-1.28,1.28] | 0 |
| F8 | Generalized Schwefel's Problem 2.26 | [-500,500] | 0 |
| F9 | Generalized Rastrigin's Function | [-5.12,5.12] | 0 |
| F10 | Ackley's Function | [-32,32] | 0 |
| F11 | Generalized Griewank's Function | [-600,600] | 0 |
| F12 | Generalized Penalized Function1 | [-50,50] | 0 |
| F13 | Generalized Penalized Function2 | [-50,50] | 0 |
表4
算法参数设置
| 算法 | 参数设置 |
|---|---|
| PSO | F=0.3;vmax=6; |
| GSA | α=20;G0=100;R=1 |
| AOA | Min =0.2;Max =1;μ=0.499;α=5 |
| AMGO | 混沌漂移-Alpa=0.7 |
| NGO | I = [ |
| CSA | Pp=0.1; |
| GWO | a =[2,0] |
表5
与其他群智能算法的比较
| 函数 | 评价指标 | 最优值 | 最差值 | 平均值 | 标准差 | 时间/s |
|---|---|---|---|---|---|---|
| F1 | PSO | 4.996×10-2 | 6.326×10-1 | 2.551×10-1 | 1.430×10-1 | 1.615×10-1 |
| GSA | 5.033×10-17 | 4.441×10-16 | 1.248×10-16 | 8.188×10-17 | 1.877 | |
| AOA | 3.977×10-290 | 3.578×10-62 | 1.431×10-45 | 6.533×10-63 | 2.141×10-1 | |
| NGO | 5.369×10-183 | 9.526×10-179 | 2.657×10-179 | 0 | 3.149×10-1 | |
| CSA | 2.404×10-3 | 3.823×10-1 | 8.330×10-2 | 9.017×10-2 | 1.497×10-1 | |
| GWO | 3.443×10-62 | 5.754×10-58 | 5.327×10-59 | 1.042×10-58 | 2.761×10-1 | |
| MGO | 2.378×10-146 | 5.754×10-58 | 5.189×10-59 | 1.041×10-58 | 2.709 | |
| AMGO | 1.626×10-159 | 4.130×10-140 | 1.377×10-141 | 7.540×10-141 | 2.194 | |
| HMGO | 0 | 0 | 0 | 0 | 4.601 | |
| F2 | PSO | 5.238×10-1 | 1.825 | 9.845×10-1 | 3.407×10-1 | 1.851×10-1 |
| GSA | 3.465×10-8 | 9.244×10-8 | 5.365×10-8 | 1.388×10-8 | 1.851×10-1 | |
| AOA | 0 | 0 | 0 | 0 | 2.333×10-1 | |
| NGO | 4.560×10-94 | 5.004×10-92 | 1.223×10-92 | 1.278×10-92 | 3.729×10-1 | |
| CSA | 1.680 | 1.393×10 | 5.495 | 2.860 | 1.763×10-1 | |
| GWO | 1.003×10-35 | 3.888×10-34 | 7.661×10-35 | 8.168×10-35 | 3.041×10-1 | |
| MGO | 5.325×10-90 | 3.888×10-34 | 7.589×10-35 | 8.227×10-35 | 3.179 | |
| AMGO | 7.171×10-90 | 8.478×10-82 | 3.110×10-83 | 1.545×10-82 | 2.485 | |
| HMGO | 0 | 0 | 0 | 0 | 4.522 | |
| F3 | PSO | 3.220×10 | 1.343×102 | 7.765×10 | 2.646×10 | 1.077 |
| GSA | 1.882×102 | 7.716×102 | 4.417×102 | 1.566×102 | 1.077 | |
| AOA | 6.219×10-221 | 1.731×10-2 | 1.749×10-3 | 4.709×10-3 | 9.931×10-1 | |
| NGO | 1.400×10-58 | 7.704×10-47 | 3.104×10-48 | 1.424×10-47 | 1.954 | |
| CSA | 5.990×102 | 3.284×103 | 1.495×103 | 6.646×102 | 9.916×10-1 | |
| GWO | 1.400×10-20 | 2.875×10-14 | 3.692×10-15 | 7.895×10-15 | 1.196 | |
| MGO | 1.024×10-21 | 2.875×10-14 | 3.100×10-15 | 7.456×10-15 | 7.154 | |
| AMGO | 9.948×10-28 | 5.139×10-17 | 3.118×10-18 | 1.035×10-17 | 3.508 | |
| HMGO | 0 | 0 | 0 | 0 | 5.780 | |
| F4 | PSO | 1.021 | 1.845 | 1.535 | 2.076×10-1 | 1.606×10-1 |
| GSA | 9.517×10-9 | 3.121 | 1.096 | 1.052 | 1.606×10-1 | |
| AOA | 1.361×10-106 | 6.836×10-2 | 2.011×10-2 | 2.078×10-2 | 2.095×10-1 | |
| NGO | 5.175×10-78 | 7.663×10-76 | 1.557×10-76 | 1.859×10-76 | 3.265×10-1 | |
| CSA | 7.844 | 1.853×10 | 1.315×10 | 2.887 | 1.569×10-1 | |
| GWO | 5.176×10-16 | 2.136×10-13 | 2.503×10-14 | 4.091×10-14 | 2.899×10-1 | |
| MGO | 5.711×10-55 | 2.136×10-13 | 2.448×10-14 | 4.114×10-14 | 2.798 | |
| AMGO | 1.937×10-57 | 1.896×10-46 | 1.335×10-47 | 4.097×10-47 | 2.114 | |
| HMGO | 0 | 0 | 0 | 0 | 4.667 | |
| F5 | PSO | 9.487×10 | 5.793×102 | 2.456×102 | 1.196×102 | 2.000×10-1 |
| GSA | 2.576×10 | 8.237×10 | 2.821×10 | 1.023×10 | 2.000×10-1 | |
| AOA | 2.692×10 | 2.878×10 | 2.810×10 | 4.325×10-1 | 2.445×10-1 | |
| NGO | 2.194×10 | 2.452×10 | 2.359×10 | 5.229×10-1 | 4.403×10-1 | |
| CSA | 2.940×10 | 1.388×103 | 2.483×102 | 3.014×102 | 1.918×10-1 | |
| GWO | 2.522×10 | 2.875×10 | 2.685×10 | 8.174×10-1 | 3.181×10-1 | |
| MGO | 1.294×10-30 | 2.875×10 | 2.592×10 | 4.959 | 3.116 | |
| AMGO | 0 | 2.360×10-29 | 1.800×10-30 | 4.887×10-30 | 2.169 | |
| HMGO | 6.727×10-10 | 8.679×10-4 | 1.602×10-4 | 1.988×10-4 | 4.871 | |
| F6 | PSO | 7.924×10-2 | 7.766×10-1 | 3.559×10-1 | 1.985×10-1 | 1.585×10-1 |
| GSA | 5.274×10-10 | 3.484×10-5 | 3.227×10-6 | 6.860×10-7 | 1.585×10-1 | |
| AOA | 2.238 | 3.326 | 2.785 | 2.591×10-1 | 2.112×10-1 | |
| NGO | 9.245×10-9 | 2.078×10-5 | 7.110×10-5 | 5.558×10-6 | 3.317×10-1 | |
| CSA | 4.252×10-3 | 2.291×10-1 | 6.376×10-2 | 6.886×10-2 | 1.662×10-1 | |
| GWO | 3.361×10-5 | 1.246 | 5.895×10-1 | 3.096×10-1 | 3.219×10-1 | |
| MGO | 5.571×10-17 | 1.246 | 5.561×10-1 | 3.175×10-1 | 2.890 | |
| AMGO | 5.542×10-8 | 2.282×10-5 | 2.199×10-6 | 4.143×10-6 | 2.008 | |
| HMGO | 8.000×10-22 | 2.728×10-12 | 1.023×10-13 | 4.982×10-13 | 5.281 | |
| F7 | PSO | 4.985×10-1 | 8.132 | 2.711 | 1.937 | 3.109×10-1 |
| GSA | 2.709×10-2 | 1.268×10-1 | 5.499×10-2 | 2.283×10-2 | 3.109×10-1 | |
| AOA | 8.382×10-7 | 1.127×10-4 | 2.896×10-5 | 3.040×10-5 | 3.735×10-1 | |
| NGO | 3.233×10-5 | 5.632×10-4 | 2.741×10-4 | 1.323×10-4 | 6.027×10-1 | |
| CSA | 1.202×10-1 | 9.775×10-1 | 5.537×10-1 | 2.573×10-1 | 2.899×10-1 | |
| GWO | 2.849×10-4 | 3.500×10-3 | 1.028×10-3 | 7.190×10-4 | 4.190×10-1 | |
| MGO | 3.164×10-5 | 3.500×10-3 | 1.019×10-3 | 7.294×10-4 | 3.307 | |
| AMGO | 4.101×10-5 | 6.953×10-4 | 2.226×10-4 | 1.670×10-4 | 2.856 | |
| HMGO | 1.826×10-7 | 7.703×10-5 | 1.921×10-5 | 1.766×10-5 | 6.559 | |
| F8 | PSO | -8.503×103 | -3.902×103 | -6.788×103 | 1.232×103 | 2.234×10-1 |
| GSA | -3.702×103 | -2.020×103 | -2.569×103 | 4.028×102 | 2.234×10-1 | |
| AOA | -6.378×103 | -4.978×103 | -5.709×103 | 4.098×102 | 2.517×10-1 | |
| NGO | -9.385×103 | -6.968×103 | -8.145×103 | 6.393×102 | 4.287×10-1 | |
| CSA | -1.235×104 | -5.776×103 | -8.043×103 | 2.835×103 | 1.983×10-1 | |
| GWO | -7.840×103 | -3.610×103 | -6.090×103 | 8.241×102 | 3.277×10-1 | |
| MGO | -1.257×104 | -3.610×103 | -6.296×103 | 1.442×103 | 2.920 | |
| AMGO | -3.764×106 | -1.933×104 | -9.315×105 | 1.101×106 | 2.239 | |
| HMGO | -1.257×104 | -1.257×104 | -1.257×104 | 7.027×10-4 | 4.947 | |
| F9 | PSO | 5.444×10 | 2.122×102 | 1.070×102 | 3.777×10 | 1.850×10-1 |
| GSA | 1.194×10 | 4.378×10 | 2.623×10 | 6.550 | 1.850×10-1 | |
| AOA | 0 | 0 | 0 | 0 | 2.009×10-1 | |
| NGO | 0 | 0 | 0 | 0 | 3.246×10-1 | |
| CSA | 1.592×10 | 5.572×10 | 3.303×10 | 1.057×10 | 1.647×10-1 | |
| GWO | 0 | 5.836 | 4.140×10-1 | 1.359 | 2.798×10-1 | |
| MGO | 0 | 5.836 | 4.140×10-1 | 1.359 | 2.724 | |
| AMGO | 0 | 0 | 0 | 0 | 2.292 | |
| HMGO | 0 | 0 | 0 | 0 | 4.791 | |
| F10 | PSO | 2.775×10-1 | 2.950 | 1.033 | 5.554×10-1 | 2.104×10-1 |
| GSA | 4.747×10-9 | 1.202×10-8 | 8.146×10-9 | 1.972×10-9 | 2.104×10-1 | |
| AOA | 8.882×10-16 | 8.882×10-16 | 8.882×10-16 | 0 | 2.377×10-1 | |
| NGO | 4.441×10-15 | 7.994×10-15 | 5.744×10-15 | 1.741×10-15 | 3.938×10-1 | |
| CSA | 1.997×10 | 1.997×10 | 1.997×10 | 2.308×10-13 | 2.069×10-1 | |
| GWO | 1.155×10-14 | 2.931×10-14 | 1.605×10-14 | 3.605×10-15 | 3.090×10-1 | |
| MGO | 8.882×10-16 | 2.931×10-14 | 1.557×10-14 | 4.545×10-15 | 2.912 | |
| AMGO | 8.882×10-16 | 4.441×10-15 | 1.007×10-15 | 6.486×10-16 | 2.415 | |
| HMGO | 8.882×10-16 | 8.882×10-16 | 8.882×10-16 | 0 | 4.822 | |
| F11 | PSO | 2.213×10-3 | 6.051×10-2 | 2.433×10-2 | 1.742×10-2 | 2.331×10-1 |
| GSA | 2.616 | 2.065×10 | 9.090 | 4.308 | 2.331×10-1 | |
| AOA | 1.315×10-4 | 3.848×10-1 | 9.922×10-2 | 8.343×10-2 | 2.581×10-1 | |
| NGO | 0 | 0 | 0 | 0 | 4.307×10-1 | |
| CSA | 1.302×10-1 | 1.100 | 6.446×10-1 | 2.690×10-1 | 2.150×10-1 | |
| GWO | 0 | 1.896×10-2 | 2.185×10-3 | 5.774×10-3 | 3.287×10-1 | |
| MGO | 0 | 1.896×10-2 | 2.185×10-3 | 5.774×10-3 | 2.985 | |
| AMGO | 0 | 0 | 0 | 0 | 2.492 | |
| HMGO | 0 | 0 | 0 | 0 | 4.459 | |
| F12 | PSO | 3.879×10-4 | 1.053×10-1 | 5.434×10-3 | 1.891×10-2 | 6.203×10-1 |
| GSA | 2.993×10-19 | 2.220 | 2.581×10-1 | 4.896×10-1 | 6.203×10-1 | |
| AOA | 3.252×10-1 | 5.285×10-1 | 3.893×10-1 | 4.583×10-2 | 6.240×10-1 | |
| NGO | 7.953×10-10 | 1.863×10-8 | 4.013×10-9 | 4.298×10-9 | 1.173 | |
| CSA | 2.603 | 8.923 | 5.923 | 1.586 | 5.721×10-1 | |
| GWO | 1.316×10-2 | 1.236×10-1 | 4.258×10-2 | 2.726×10-2 | 7.194×10-1 | |
| MGO | 1.571×10-32 | 1.236×10-1 | 4.125×10-2 | 2.835×10-2 | 4.692 | |
| AMGO | 5.460×10-31 | 2.744×10-9 | 1.522×10-9 | 3.217×10-9 | 4.547 | |
| HMGO | 1.571×10-32 | 1.571×10-32 | 1.571×10-32 | 5.567×10-48 | 6.841 | |
| F13 | PSO | 1.057×10-2 | 2.911×10-1 | 8.818×10-2 | 5.618×10-2 | 5.827×10-1 |
| GSA | 5.470×10-18 | 2.592 | 1.652×10-1 | 5.180×10-1 | 5.827×10-1 | |
| AOA | 2.379 | 2.945 | 2.803 | 1.382×10-1 | 6.031×10-1 | |
| NGO | 1.269×10-7 | 4.733×10-1 | 1.174×10-1 | 1.219×10-1 | 1.108 | |
| CSA | 2.578 | 7.534×10 | 4.304×10 | 1.950×10 | 5.422×10-1 | |
| GWO | 9.656×10-2 | 1.021 | 5.431×10-1 | 2.475×10-1 | 6.588×10-1 | |
| MGO | 1.350×10-32 | 1.021 | 5.363×10-1 | 2.597×10-1 | 4.197 | |
| AMGO | 1.159×10-8 | 1.148×10-5 | 1.809×10-6 | 2.874×10-6 | 4.378 | |
| HMGO | 1.350×10-32 | 1.350×10-32 | 1.350×10-32 | 5.567×10-48 | 6.881 |

图7
9种算法高维寻优曲线对比
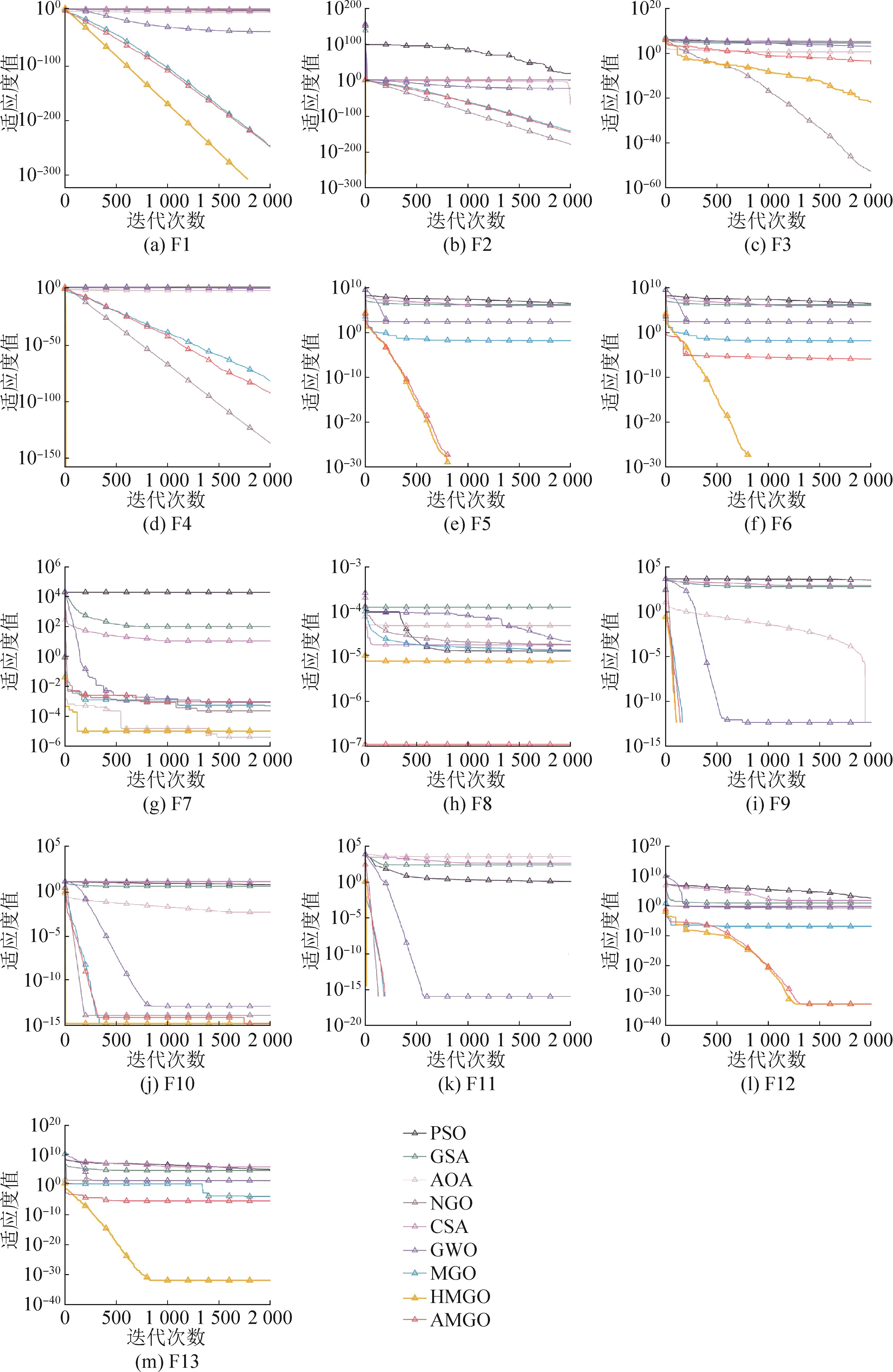
表6
Wilcoxon秩和检验结果
| 函数 | PSO | GSA | AOA | NGO | CSA | GWO | AMGO | MGO |
|---|---|---|---|---|---|---|---|---|
| F1 | -38.7 (<) | -38.7 (<) | -37.4 (<) | -38.4 (<) | -38.8 (<) | -38.7 (<) | -34.8 (<) | -35.4 (<) |
| F2 | -13.5 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.6 (<) | -38.7 (<) | -38.7 (<) |
| F3 | -38.7 (<) | -38.7 (<) | -30.2 (<) | -6.83 (>) | -38.8 (<) | -38.7 (<) | -37.4 (<) | -0.583 (<) |
| F4 | -38.7 (<) | -38.7 (<) | -40.4 (<) | -38.7 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -38.4 (<) |
| F5 | -38.7 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -14.6 (<) | -37.9 (<) |
| F6 | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -22.2 (<) | -34.5 (<) |
| F7 | -39.3 (<) | -39.2 (<) | -14.6 (<) | -39.0 (<) | -38.8 (<) | -38.8 (<) | -40.1 (<) | -39.6 (<) |
| F8 | -38.7 (<) | -39.9 (<) | -39.9 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -39.9 (>) | -38.7 (<) |
| F9 | -38.8 (<) | -38.7 (<) | -38.3 (<) | -8.85 (<) | -38.8 (<) | -40.0 (<) | -10.4 (<) | -11.1 (<) |
| F10 | -38.7 (<) | -38.7 (<) | -38.6 (<) | -42.9 (<) | -38.9 (<) | -39.7 (<) | -39.3 (<) | -15.8 (<) |
| F11 | -38.7 (<) | -38.7 (<) | -41.2 (<) | -9.74 (<) | -38.8 (<) | -40.7 (<) | -12.0 (<) | -9.49 (<) |
| F12 | -38.7 (<) | -38.7 (<) | -40.2 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -21.7 (<) | -33.0 (<) |
| F13 | -38.7 (<) | -38.7 (<) | -39.2 (<) | -38.7 (<) | -38.7 (<) | -38.8 (<) | -24.7 (=) | -38.8 (<) |
图 8
20 m×20 m地图

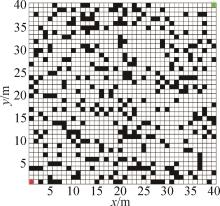
图9
40 m×40 m地图
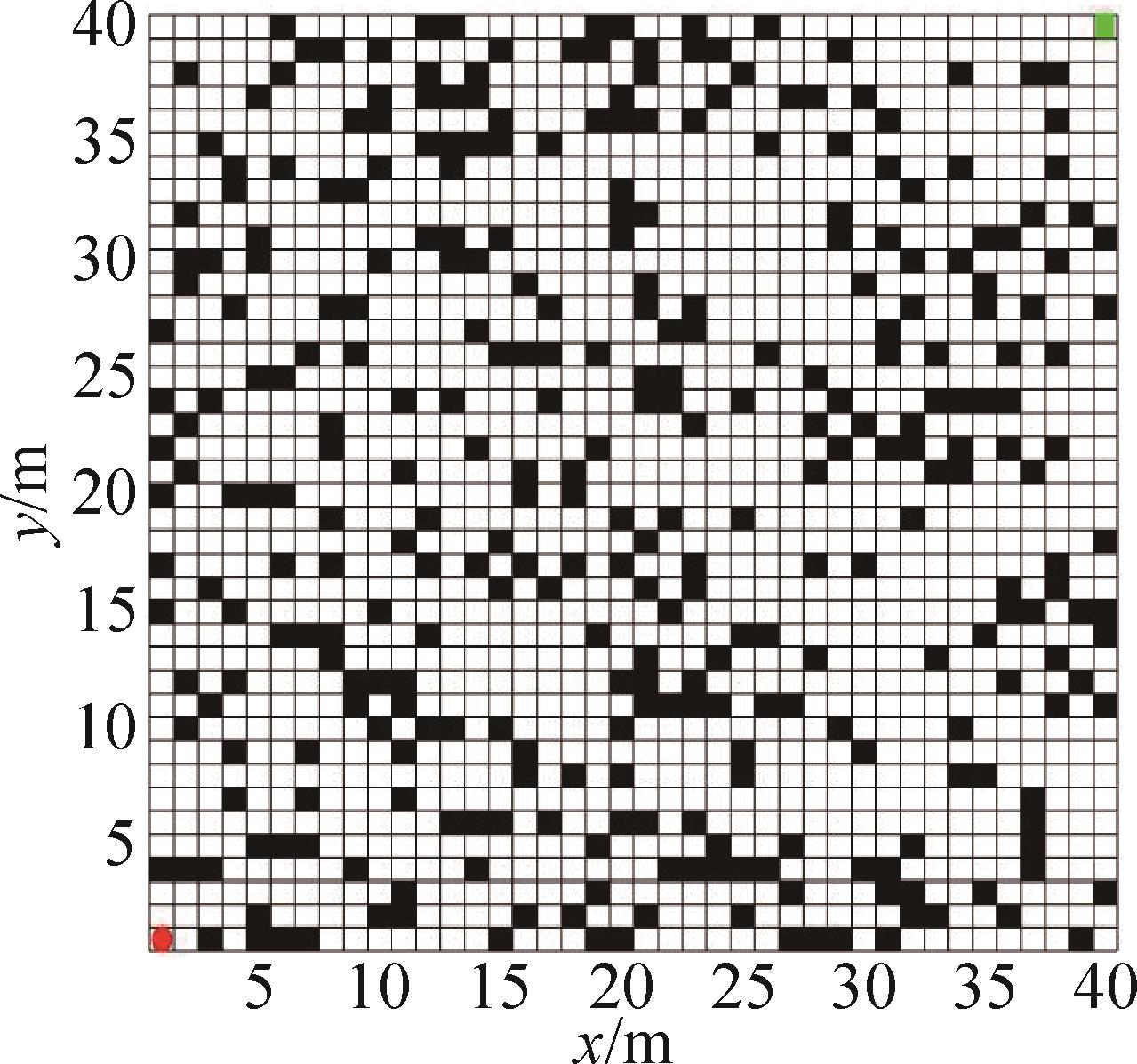
表7
20 m×20 m地图路径规划统计结果
| 算法 | 最小值 | 最大值 | 平均值 | 标准差 |
|---|---|---|---|---|
| PSO | 28.0 | 36.3 | 29.5 | 0.528 |
| AOA | 30.4 | 32.4 | 30.8 | 0.626 |
| SSA | 28.0 | 35.2 | 28.2 | 0.902 |
| GWO | 28.6 | 35.8 | 29.9 | 2.150 |
| IAFO | 28.0 | 48.0 | 28.1 | 0.895 |
| AMGO | 26.9 | 30.3 | 28.8 | 0.800 |
| MGO | 27.5 | 35.2 | 28.0 | 0.730 |
| HMGO | 26.9 | 26.9 | 26.9 | 0 |
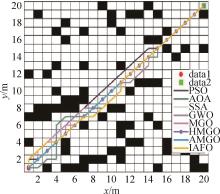
图10
20 m×20 m环境下路径规划
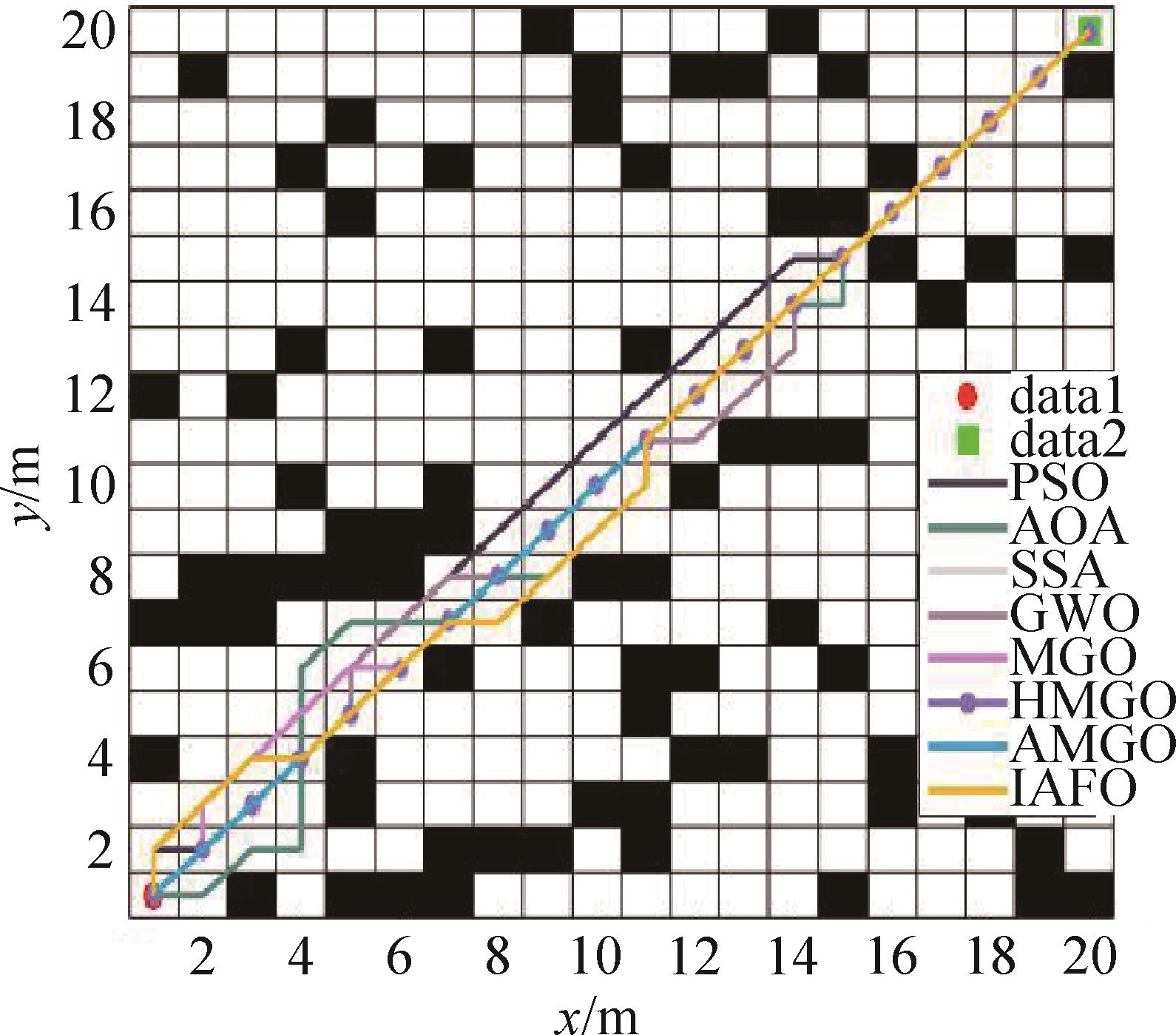
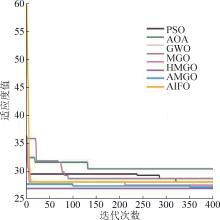
图11
20 m×20 m迭代收敛曲线
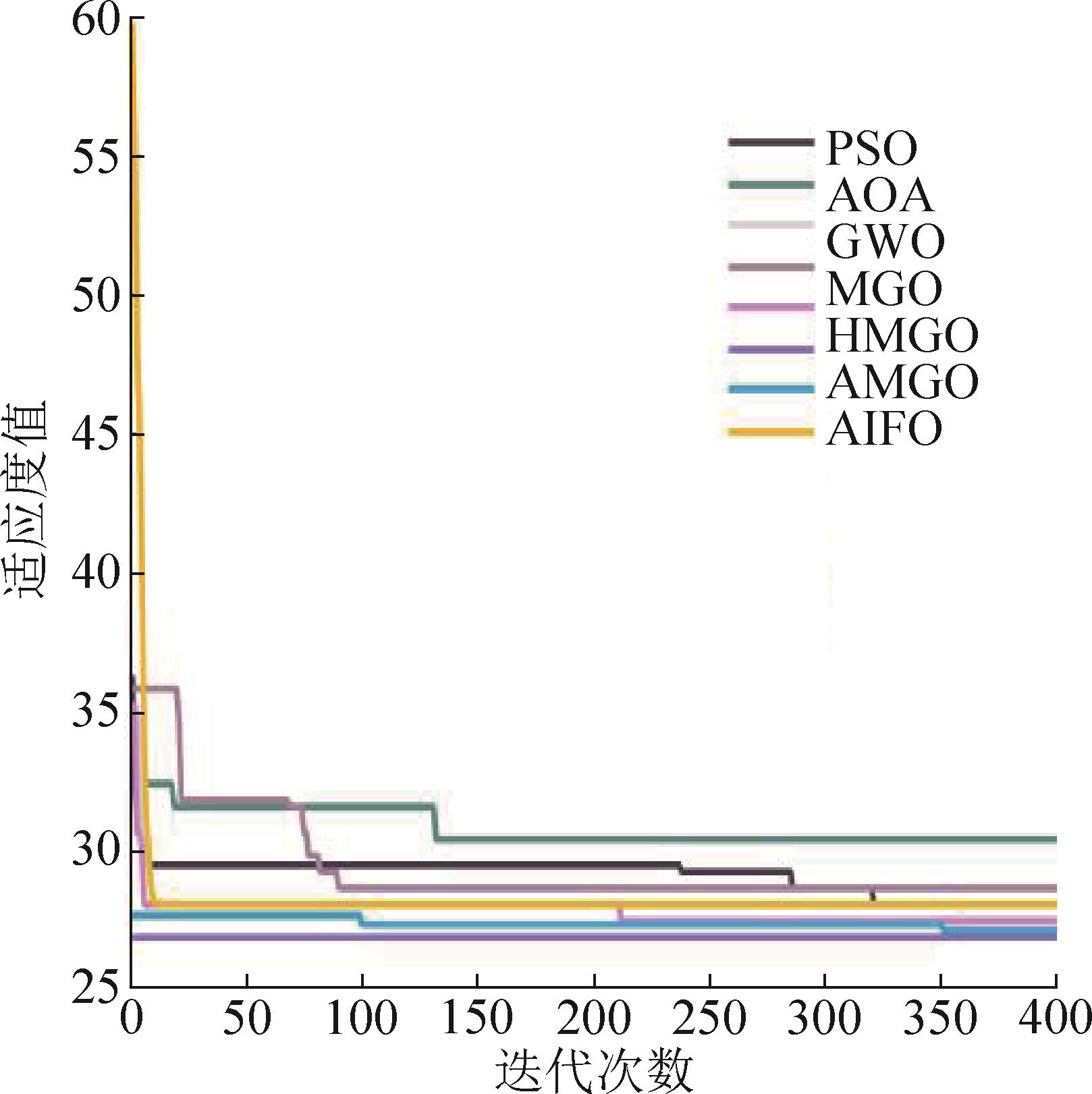
表8
40 m×40 m 地图路径规划统计结果
| 算法 | 最小值 | 最大值 | 平均值 | 标准差 |
|---|---|---|---|---|
| PSO | 82.2 | 134 | 101 | 6.47 |
| AOA | 83.3 | 112 | 96.5 | 8.04 |
| SSA | 57.5 | 57.5 | 57.5 | 1.14×10⁻13 |
| GWO | 71.2 | 145 | 83.3 | 18.7 |
| IAFO | 70 | 211 | 71.9 | 14 |
| AMGO | 68.9 | 211 | 74.4 | 13.6 |
| MGO | 69.5 | 211 | 75.3 | 13.4 |
| HMGO | 56.9 | 57.5 | 57.1 | 0.275 |
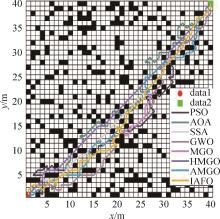
图12
40 m×40 m环境下路径规划


图13
40 m×40 m迭代收敛曲线
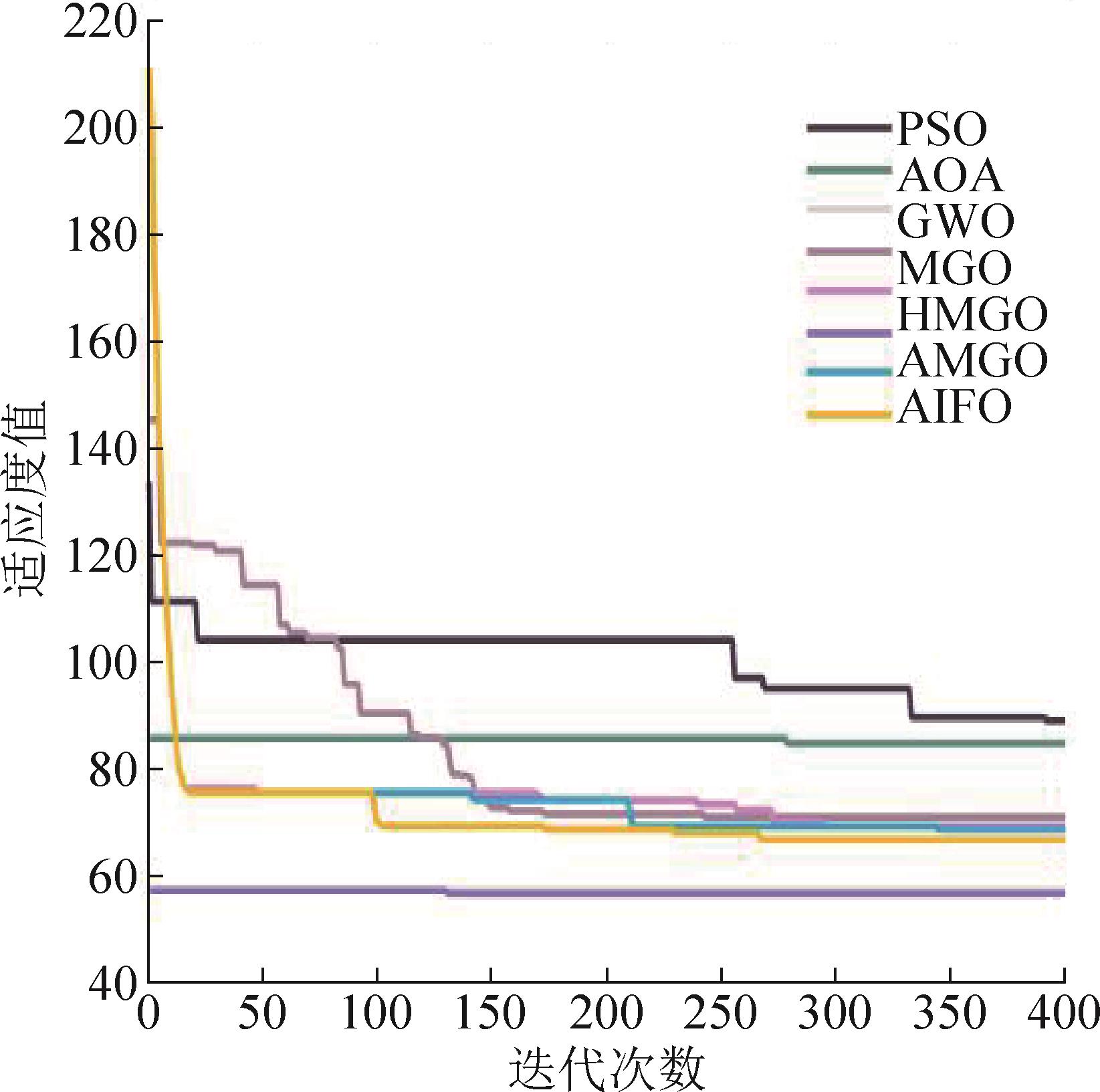
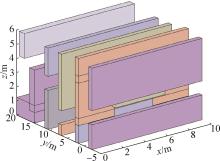
图14
三维空间网格化
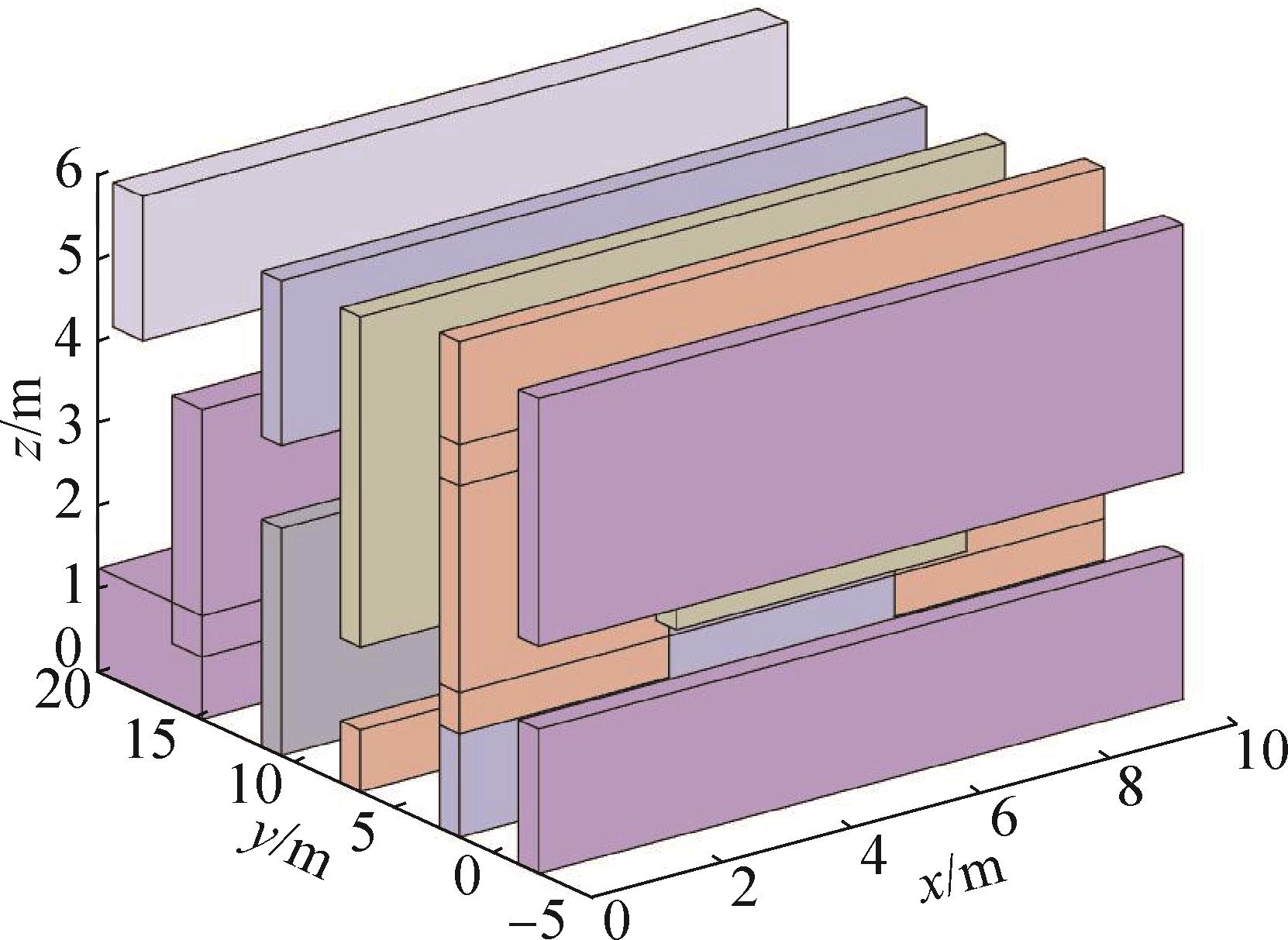
表9
环境参数
| 编号 | 障碍物坐标 |
|---|---|
| 1 | [0, -2, 0][0, -2, 1.5][0, -3.5, 0][0, -3.5, 1.5][10, -2, 0][10, -2, 1.5][10, -3.5, 0][10, -3.5, 1.5] |
| 2 | [0, -2, 3][0, -2, 9][0, -3.5, 3][0, -3.5, 9][10, -2, 3][10, -2, 9][10, -3.5, 3][10, -3.5, 9] |
| 3 | [0, 2, 0][0, 2, 1.5][0, 4.5, 0][0, 4.5, 1.5][10, 2, 0][10, 2, 1.5][10, 4.5, 0][10, 4.5, 1.5] |
| 4 | [0, 2, 4.5][0, 2, 10.5][0, 4.5, 4.5][0, 4.5, 10.5][10, 2, 4.5][10, 2, 10.5][10, 4.5, 4.5][10, 4.5, 10.5] |
| 5 | [0, 7, 0][0, 7, 0.5][0, 14.5, 0][0, 14.5, 0.5][10, 7, 0][10, 7, 0.5][10, 14.5, 0][10, 14.5, 0.5] |
| 6 | [0, 11, 0][0, 11, 2.5][0, 22.5, 0][0, 22.5, 2.5][10, 11, 0][10, 11, 2.5][10, 22.5, 0][10, 22.5, 2.5] |
| 7 | [0, 11, 4][0, 11, 10][0, 22.5, 4][0, 22.5, 10][10, 11, 4][10, 11, 10][10, 22.5, 4][10, 22.5, 10] |
| 8 | [0, -2, 0][0, -2, 1.5][0, -3.5, 0][0, -3.5, 1.5][10, -2, 0][10, -2, 1.5][10, -3.5, 0][10, -3.5, 1.5] |
| 9 | [0, -2, 3][0, -2, 9][0, -3.5, 3][0, -3.5, 9][10, -2, 3][10, -2, 9][10, -3.5, 3][10, -3.5, 9] |
| 10 | [0, 2, 1.5][0, 2, 6][0, 4.5, 1.5][0, 4.5, 6][3, 2, 1.5][3, 2, 6][3, 4.5, 1.5][3, 4.5, 6] |
| 11 | [7, 2, 1.5][7, 2, 6][7, 4.5, 1.5][7, 4.5, 6][17, 2, 1.5][17, 2, 6][17, 4.5, 1.5][17, 4.5, 6] |
| 12 | [3, 0, 2.4][3, 0, 6.9][3, 0.5, 2.4][3, 0.5, 6.9][10, 0, 2.4][10, 0, 6.9][10, 0.5, 2.4][10, 0.5, 6.9] |
| 13 | [0, 15, 0][0, 15, 1][0, 35, 0][0, 35, 1][10, 15, 0][10, 15, 1][10, 35, 0][10, 35, 1] |
| 14 | [0, 15, 1][0, 15, 4.5][0, 31, 1][0, 31, 4.5][10, 15, 1][10, 15, 4.5][10, 31, 1.0][10, 31, 4.5] |
| 15 | [0, 18, 4.5][0, 18, 10.5][0, 37, 4.5][0, 37, 10.5][10, 18, 4.5][10, 18, 10.5][10, 37, 4.5][10, 37, 10.5] |

图15
三维空间仿真结果
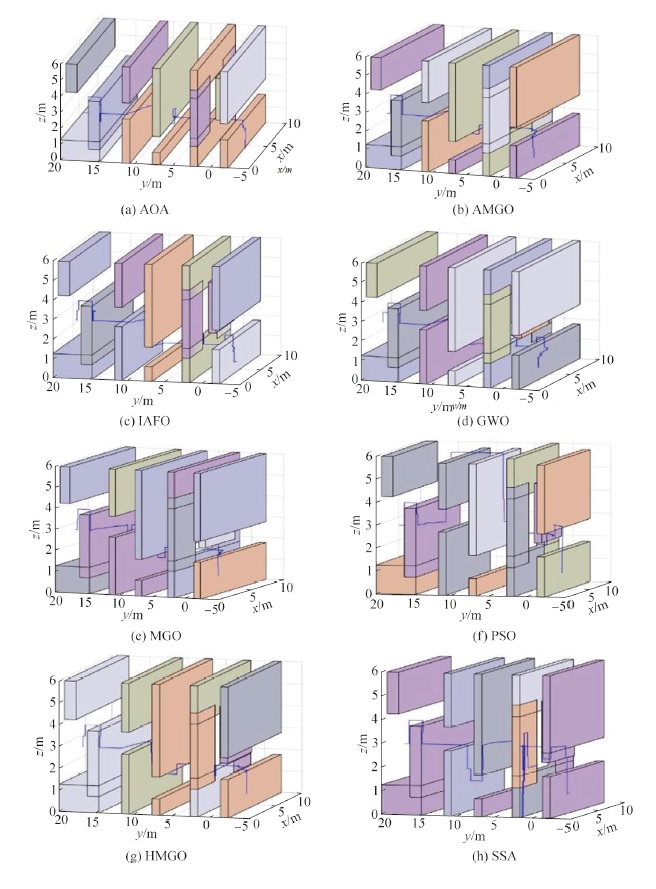
表10
三维空间路径规划统计结果
| 算法 | 最小值 | 最大值 | 平均值 | 标准差 | 平均时间 |
|---|---|---|---|---|---|
| AOA | 3.28×10² | 3.68×10² | 3.32×10² | 7.50×10⁰ | 3.28×10² |
| HMGO | 3.09×10² | 3.75×10² | 3.15×10² | 7.03×10⁰ | 6.23×102 |
| AMGO | 3.11×10² | 4.33×10² | 3.17×10² | 9.50×10⁰ | 2.25×10² |
| IAFO | 3.15×10² | 3.79×10² | 3.19×10² | 1.24×10¹ | 3.15×10² |
| GWO | 3.33×10² | 3.82×10² | 3.34×10² | 5.38×10⁰ | 2.19×10¹ |
| PSO | 3.34×10² | 1.12×10³ | 3.55×10² | 5.21×10¹ | 3.34×10² |
| MGO | 3.14×10² | 4.06×10² | 3.22×10² | 1.30×10¹ | 3.14×10² |
| SSA | 3.77×10² | 3.97×10² | 3.78×10² | 3.62×10⁰ | 3.77×10² |
| 1 | José Ricardo Sánchez-Ibáñez. Carlos J Pérez-del-Pulgar, Alfonso García-Cerezo. Path Planning for Autonomous Mobile Robots: A Review[J]. Sensors, 2021, 21(23): 7898. |
| 2 | Fu Bing, Chen Lin, Zhou Yuntao, et al. An Improved A* Algorithm for the Industrial Robot Path Planning with High Success Rate and Short Length[J]. Robotics and Autonomous Systems, 2018, 106: 26-37. |
| 3 | Feng Jiahui, Mao Yuanyuan. Research on Analysis of Desert Crossing Problem Based on Dijkstra Model[J]. Journal of Physics: Conference Series, 2021, 1955(1): 012091. |
| 4 | 宋金泽, 戴斌, 单恩忠, 等. 一种改进的RRT路径规划算法[J]. 电子学报, 2010, 38(增1): 225-228. |
| Song Jinze, Dai Bin, Shan Enzhong, et al. An Improved RRT Path Planning Algorithm[J]. Acta Electronica Sinica, 2010, 38(S1): 225-228. | |
| 5 | Chang Lu, Shan Liang, Jiang Chao, et al. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment[J]. Autonomous Robots, 2021, 45(1): 51-76. |
| 6 | Zhu Qidan, Yan Yongjie, Xing Zhuoyi. Robot Path Planning Based on Artificial Potential Field Approach with Simulated Annealing[C]//Sixth International Conference on Intelligent Systems Design and Applications. Piscataway: IEEE, 2006: 622-627. |
| 7 | 李士勇, 李研, 林永茂. 智能优化算法与涌现计算[M]. 北京: 清华大学出版社, 2019. |
| Li Shiyong, Li Yan, Lin Yongmao. Intelligent Optimization Algorithms and Emergent Computation[M]. Beijing: Tsinghua University Press, 2019. | |
| 8 | Kennedy J, Eberhart R. Particle Swarm Optimization[C]//Proceedings of ICNN'95 - International Conference on Neural Networks. Piscataway: IEEE, 1995: 1942-1948. |
| 9 | Dorigo M, Di Caro G. Ant Colony Optimization: A New Meta-heuristic[C]//Proceedings of the 1999 Congress on Evolutionary Computation-CEC99. Piscataway: IEEE, 1999: 1470-1477. |
| 10 | Mirjalili Seyedali, Seyed Mohammad Mirjalili, Lewis Andrew. Grey Wolf Optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| 11 | Mirjalili Seyedali, Lewis Andrew. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| 12 | Song Baoye, Wang Zidong, Zou Lei. An Improved PSO Algorithm for Smooth Path Planning of Mobile Robots Using Continuous High-degree Bezier Curve[J]. Applied Soft Computing, 2021, 100: 106960. |
| 13 | 游达章, 康亚伟, 刘攀, 等. 一种改进灰狼优化算法的移动机器人路径规划方法[J]. 机床与液压, 2021, 49(11): 1-6. |
| You Dazhang, Kang Yawei, Liu Pan, et al. A Path Planning Method for Mobile Robot Based on Improved Grey Wolf Optimizer[J]. Machine Tool & Hydraulics, 2021, 49(11): 1-6. | |
| 14 | 张品, 李长勇. 能耗优化的改进IWOA-APF移动机器人路径规划[J]. 组合机床与自动化加工技术, 2022(11): 11-14. |
| Zhang Pin, Li Changyong. Improved IWOA-APF Path Planning for Mobile Robots Considering Energy Consumption[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(11): 11-14. | |
| 15 | Abdollahzadeh Benyamin, Farhad Soleimanian Gharehchopogh, Khodadadi N, et al. Mountain Gazelle Optimizer: A new Nature-inspired Metaheuristic Algorithm for Global Optimization Problems[J]. Advances in Engineering Software, 2022, 174: 103282. |
| 16 | Chandrasekaran Kumar, Alex Stanley Raja Thaveedhu, Manoharan Premkumar, et al. Optimal Estimation of Parameters of the Three-diode Commercial Solar Photovoltaic Model Using an Improved Berndt-hall-hall-hausman Method Hybridized with an Augmented Mountain Gazelle Optimizer[J]. Environmental Science and Pollution Research, 2023, 30(20): 57683-57706. |
| 17 | Wang Tianlei, Li Junhui, Liu Renju, et al. Dynamic Grey Wolf Optimization Algorithm Based on Quasi-opposition Learning[C]//3D Imaging—Multidimensional Signal Processing and Deep Learning. Singapore: Springer Nature Singapore, 2022: 11-22. |
| 18 | Hasanipanah Mahdi, Keshtegar Behrooz, Duc Kien Thai, et al. An ANN-adaptive Dynamical Harmony Search Algorithm to Approximate the Flyrock Resulting from Blasting[J]. Engineering with Computers, 2022, 38(2): 1257-1269. |
| 19 | Abualigah Laith, Diabat Ali, Mirjalili Seyedali, et al. The Arithmetic Optimization Algorithm[J]. Computer Methods in Applied Mechanics and Engineering, 2021, 376: 113609. |
| 20 | Mirjalili Seyedali. SCA: A Sine Cosine Algorithm for Solving Optimization Problems[J]. Knowledge-Based Systems, 2016, 96: 120-133. |
| 21 | 贾鹤鸣, 刘庆鑫, 刘宇翔, 等. 融合动态反向学习的阿奎拉鹰与哈里斯鹰混合优化算法[J]. 智能系统学报, 2023, 18(1): 104-116. |
| Jia Heming, Liu Qingxin, Liu Yuxiang, et al. Hybrid Aquila and Harris Hawks Optimization Algorithm with Dynamic Opposition-based Learning[J]. CAAI Transactions on Intelligent Systems, 2023, 18(1): 104-116. | |
| 22 | Deng Wu, Ni Hongcheng, Liu Yi, et al. An Adaptive Differential Evolution Algorithm Based on Belief Space and Generalized Opposition-based Learning for Resource Allocation[J]. Applied Soft Computing, 2022, 127: 109419. |
| 23 | Betül Sultan Yildiz, Pholdee Nantiwat, Bureerat Sujin, et al. Enhanced Grasshopper Optimization Algorithm Using Elite Opposition-based Learning for Solving Real-world Engineering Problems[J]. Engineering with Computers, 2022, 38(5): 4207-4219. |
| 24 | Roy P K, Mandal D. Quasi-oppositional Biogeography-based Optimization for Multi-objective Optimal Power Flow[J]. Electric Power Components and Systems, 2011, 40(2): 236-256. |
| 25 | Tang Chenjun, Sun Wei, Xue Min, et al. A Hybrid Whale Optimization Algorithm with Artificial Bee Colony[J]. Soft Computing, 2022, 26(5): 2075-2097. |
| 26 | Ahmadianfar Iman, Ali Asghar Heidari, Gandomi Amir H, et al. RUN Beyond the Metaphor: An Efficient Optimization Algorithm Based on Runge Kutta Method[J]. Expert Systems with Applications, 2021, 181: 115079. |
| 27 | 高炳微, 申伟, 戴野, 等. 基于改进萤火虫算法的摩擦模型参数辨识及补偿[J]. 振动与冲击, 2023, 42(6): 69-78. |
| Gao Bingwei, Shen Wei, Dai Ye, et al. Parameter Identification and Compensation of a Friction Model Based on Improved Glowworm Swarm Optimization[J]. Journal of Vibration and Shock, 2023, 42(6): 69-78. | |
| 28 | Shiv Ram Dubey, Satish Kumar Singh, Bidyut Baran Chaudhuri. Activation Functions in Deep Learning: A Comprehensive Survey and Benchmark[J]. Neurocomputing, 2022, 503: 92-108. |
| 29 | Rashedi Esmat, Hossein Nezamabadi Pour, Saryazdi Saeid. GSA: A Gravitational Search Algorithm[J]. Information Sciences, 2009, 179(13): 2232-2248. |
| 30 | Malik Shehadeh Braik. Chameleon Swarm Algorithm: A Bio-inspired Optimizer for Solving Engineering Design Problems[J]. Expert Systems with Applications, 2021, 174: 114685. |
| 31 | Dehghani Mohammad, Hubálovský Štěpán, Trojovský Pavel. Northern Goshawk Optimization: A New Swarm-based Algorithm for Solving Optimization Problems[J]. IEEE Access, 2021, 9: 162059-162080. |
| 32 | Wilcoxon F, Katti S, Wilcox R A. Critical Values and Probability Levels for the Wilcoxon Rank Sum Test and the Wilcoxon Signed Rank Test[J]. Selected Tables in Mathematical Statistics, 1970, 1: 171-259. |
| 33 | 韩忠华, 冯兴浩, 吕哲, 等. 一种改进的无人机路径规划环境建模方法[J]. 信息与控制, 2018, 47(3): 371-378. |
| Han Zhonghua, Feng Xinghao, Zhe Lü, et al. An Improved UAV Path Planning Environment Modeling Method[J]. Information and Control, 2018, 47(3): 371-378. | |
| 34 | Yang Zhe, Deng Libao, Wang Yuchen, et al. Aptenodytes Forsteri Optimization: Algorithm and Applications[J]. Knowledge-Based Systems, 2021, 232: 107483. |
| 35 | Song Peicheng, Shyang Pan Jeng, Chu Shuchuan. A Parallel Compact Cuckoo Search Algorithm for Three-dimensional Path Planning[J]. Applied Soft Computing, 2020, 94: 106443. |
| [1] | 梁隆硝, 毛剑琳, 王妮娅, 房程远, 周雯娜. 最小规划裕量优先的多机器人CBS路径规划算法[J]. 系统仿真学报, 2026, 38(5): 1159-1173. |
| [2] | 孟文龙, 濮彦博, 龚亚. 未知环境下融合局部-全局策略的AUV路径规划[J]. 系统仿真学报, 2026, 38(4): 889-902. |
| [3] | 李德权, 熊婉. 基于SAC3Q-HDM的强化学习机器人路径规划[J]. 系统仿真学报, 2026, 38(3): 714-724. |
| [4] | 谢俊, 张琦, 彭延云, 石浩楠, 李东阳, 刘熙. 基于无碰撞轨迹的无人机路径规划方法研究[J]. 系统仿真学报, 2026, 38(3): 808-817. |
| [5] | 朱玲, 李靖, 张朝辉. 基于改进REA*算法的机器人自适应路径规划[J]. 系统仿真学报, 2026, 38(2): 332-345. |
| [6] | 王秉坤, 王越, 杨妹, 张鹏年, 樊浡昊, 唐杰. 基于改进近端策略优化算法的无人车打击策略规划方法[J]. 系统仿真学报, 2026, 38(2): 372-386. |
| [7] | 于逸然, 赖惠成, 高古学, 张过, 彭汪忆楠, 杨龙飞, 黄俊豪. 基于遗传算法和A*算法的多农机协同作业优化方法[J]. 系统仿真学报, 2025, 37(9): 2397-2408. |
| [8] | 倪培龙, 毛鹏军, 王宁, 杨孟杰. 基于改进A-DDQN算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(9): 2420-2430. |
| [9] | 张凯翔, 毛剑琳, 王妮娅, 徐志昊. 针对路径干扰的多机器人分层协作k鲁棒路径规划[J]. 系统仿真学报, 2025, 37(8): 2074-2088. |
| [10] | 万宇航, 朱子璐, 钟春富, 刘永奎, 林廷宇, 张霖. 基于改进PPO算法的机械臂动态路径规划[J]. 系统仿真学报, 2025, 37(6): 1462-1473. |
| [11] | 叶晨, 邵鹏, 张少平, 李文婷, 周腾明. 面向移动机器人路径规划的增强型人工大猩猩算法[J]. 系统仿真学报, 2025, 37(6): 1474-1485. |
| [12] | 张艳, 李炳华, 霍涛, 刘榕. 融合改进A*算法与DWA算法的机器人动态避障方法研究[J]. 系统仿真学报, 2025, 37(6): 1555-1564. |
| [13] | 周晓晖, 李研强, 王勇, 赵德财, 杨逍瑶. 基于双启发式信息蚁群算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(5): 1280-1289. |
| [14] | 喻蝶, 鲍柏仲, 司言, 段暕, 詹小斌, 史铁林. 基于搜索步优化A*算法的移动机器人路径规划[J]. 系统仿真学报, 2025, 37(4): 1041-1050. |
| [15] | 张森, 代强强. 改进型深度确定性策略梯度的无人机路径规划[J]. 系统仿真学报, 2025, 37(4): 875-881. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
