| 1 |
Boysen Nils, René de Koster, Weidinger Felix. Warehousing in the E-commerce Era: A Survey[J]. European Journal of Operational Research, 2019, 277(2): 396-411.
|
| 2 |
朱大奇, 颜明重. 移动机器人路径规划技术综述[J]. 控制与决策, 2010, 25(7): 961-967.
|
|
Zhu Daqi, Yan Mingzhong. Survey on Technology of Mobile Robot Path Planning[J]. Control and Decision, 2010, 25(7): 961-967.
|
| 3 |
庞燕, 罗华丽, 邢立宁, 等. 车辆路径优化问题及求解方法研究综述[J]. 控制理论与应用, 2019, 36(10): 1573-1584.
|
|
Pang Yan, Luo Huali, Xing Lining, et al. A Survey of Vehicle Routing Optimization Problems and Solution Methods[J]. Control Theory & Applications, 2019, 36(10): 1573-1584.
|
| 4 |
Seyyed Mohammad Hosseini Rostami, Arun Kumar Sangaiah, Wang Jin, et al. Obstacle Avoidance of Mobile Robots Using Modified Artificial Potential Field Algorithm[J]. EURASIP Journal on Wireless Communications and Networking, 2019, 2019(1): 70.
|
| 5 |
赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910.
|
|
Zhao Xiao, Wang Zheng, Huang Chengkan, et al. Mobile Robot Path Planning Based on an Improved A* Algorithm[J]. Robot, 2018, 40(6): 903-910.
|
| 6 |
Alshammrei Shaher, Boubaker Sahbi, Kolsi Lioua. Improved Dijkstra Algorithm for Mobile Robot Path Planning and Obstacle Avoidance[J]. Computers, Materials & Continua, 2022, 72(3): 5939-5954.
|
| 7 |
Kumar Kar Arpan. Bio Inspired Computing-A Review of Algorithms and Scope of Applications[J]. Expert Systems with Applications, 2016, 59: 20-32.
|
| 8 |
Nazarahari Milad, Khanmirza Esmaeel, Doostie Samira. Multi-objective Multi-robot Path Planning in Continuous Environment Using an Enhanced Genetic Algorithm[J]. Expert Systems with Applications, 2019, 115: 106-120.
|
| 9 |
Ajeil Fatin H, Ibraheem Kasim Ibraheem, Sahib Mouayad A, et al. Multi-objective Path Planning of an Autonomous Mobile Robot Using Hybrid PSO-MFB Optimization Algorithm[J]. Applied Soft Computing, 2020, 89: 106076.
|
| 10 |
Liu Jianhua, Yang Jianguo, Liu Huaping, et al. An Improved Ant Colony Algorithm for Robot Path Planning[J]. Soft Computing, 2017, 21(19): 5829-5839.
|
| 11 |
Ali Asghar Heidari, Mirjalili Seyedali, Faris Hossam, et al. Harris Hawks Optimization: Algorithm and Applications[J]. Future Generation Computer Systems, 2019, 97: 849-872.
|
| 12 |
Rodríguez-Esparza RodríErick, Zanella-Calzada Laura A, Oliva Diego, et al. An Efficient Harris Hawks-inspired Image Segmentation Method[J]. Expert Systems with Applications, 2020, 155: 113428.
|
| 13 |
Jiao Shan, Chong Guoshuang, Huang Changcheng, et al. Orthogonally Adapted Harris Hawks Optimization for Parameter Estimation of Photovoltaic Models[J]. Energy, 2020, 203: 117804.
|
| 14 |
Belge Egemen, Altan Aytaç, Hacıoğlu Rıfat. Metaheuristic Optimization-based Path Planning and Tracking of Quadcopter for Payload Hold-release Mission[J]. Electronics, 2022, 11(8): 1208.
|
| 15 |
Zhang Ran, Li Sen, Ding Yuanming, et al. UAV Path Planning Algorithm Based on Improved Harris Hawks Optimization[J]. Sensors, 2022, 22(14): 5232.
|
| 16 |
Nandi Ayani, Vikram Kumar Kamboj. A Canis Lupus Inspired Upgraded Harris Hawks Optimizer for Nonlinear, Constrained, Continuous, and Discrete Engineering Design Problem[J]. International Journal for Numerical Methods in Engineering, 2021, 122(4): 1051-1088.
|
| 17 |
Kaveh A, Rahmani P, Dadras Eslamlou A. An Efficient Hybrid Approach Based on Harris Hawks Optimization and Imperialist Competitive Algorithm for Structural Optimization[J]. Engineering with Computers, 2022, 38(2): 1555-1583.
|
| 18 |
Qu Chiwen, Zhang Lupeng, Li Jinlong, et al. Improving Feature Selection Performance for Classification of Gene Expression Data Using Harris Hawks Optimizer with Variable Neighborhood Learning[J]. Briefings in Bioinformatics, 2021, 22(5): bbab097.
|
| 19 |
Jia Heming, Lang Chunbo, Oliva Diego, et al. Dynamic Harris Hawks Optimization with Mutation Mechanism for Satellite Image Segmentation[J]. Remote Sensing, 2019, 11(12): 1421.
|
| 20 |
Hussien Abdelazim G, Amin Mohamed. A Self-adaptive Harris Hawks Optimization Algorithm with Opposition-based Learning and Chaotic Local Search Strategy for Global Optimization and Feature Selection[J]. International Journal of Machine Learning and Cybernetics, 2022, 13(2): 309-336.
|
| 21 |
Nasr Aida A. A New Cloud Autonomous System as a Service for Multi-mobile Robots[J]. Neural Computing and Applications, 2022, 34(23): 21223-21235.
|
| 22 |
Amin Abdollahi Dehkordi, Sadiq A S, Mirjalili Seyedali, et al. Nonlinear-based Chaotic Harris Hawks Optimizer: Algorithm and Internet of Vehicles Application[J]. Applied Soft Computing, 2021, 109: 107574.
|
| 23 |
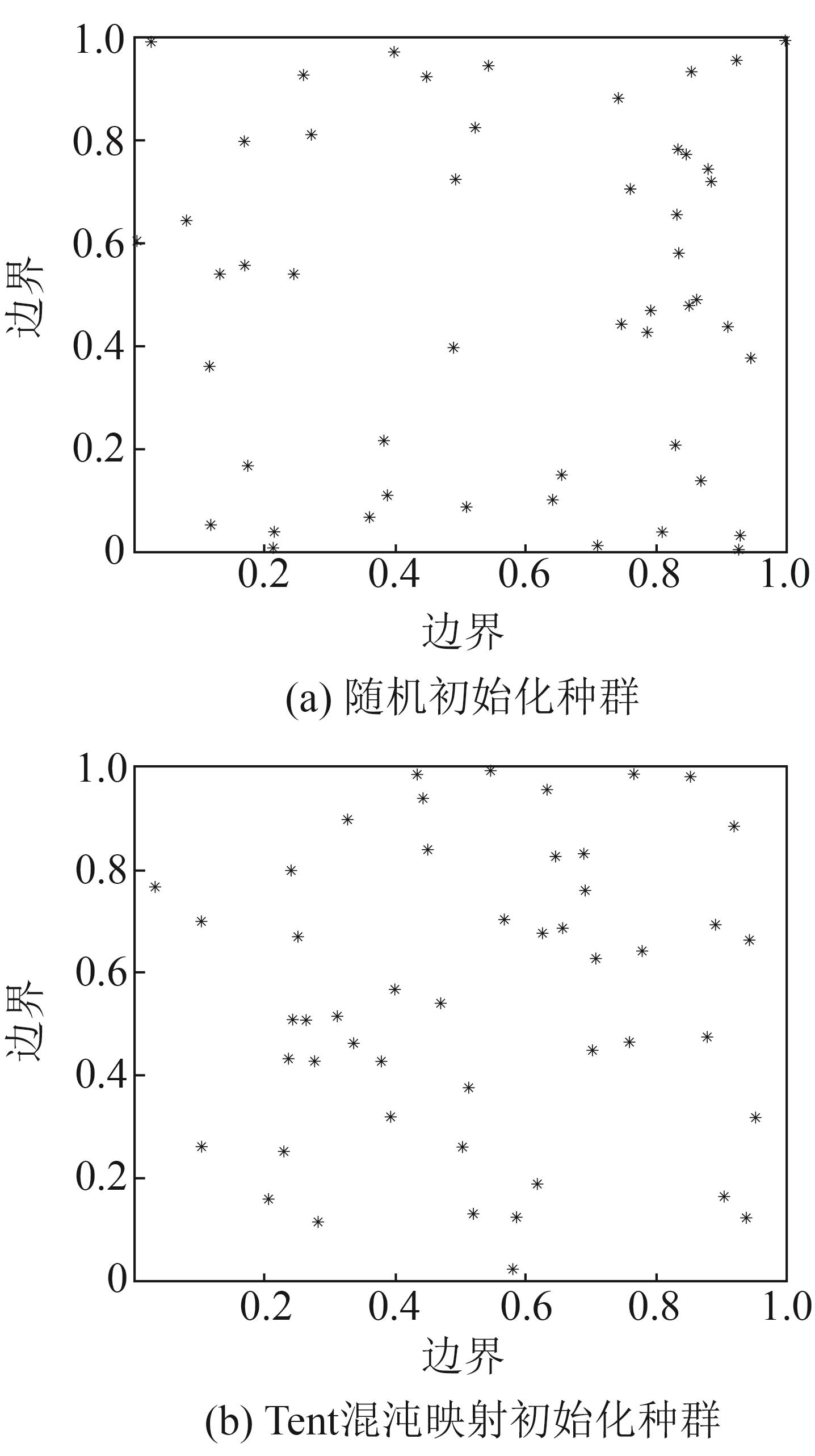
滕志军, 吕金玲, 郭力文, 等. 一种基于Tent映射的混合灰狼优化的改进算法[J]. 哈尔滨工业大学学报, 2018, 50(11): 40-49.
|
|
Teng Zhijun, Jinling Lü, Guo Liwen, et al. An Improved Hybrid Grey Wolf Optimization Algorithm Based on Tent Mapping[J]. Journal of Harbin Institute of Technology, 2018, 50(11): 40-49.
|
| 24 |
Wang Wenchuan, Xu Lei, Chau K W, et al. Yin-yang Firefly Algorithm Based on Dimensionally Cauchy Mutation[J]. Expert Systems with Applications, 2020, 150: 113216.
|
| 25 |
何庆, 林杰, 徐航. 混合柯西变异和均匀分布的蝗虫优化算法[J]. 控制与决策, 2021, 36(7): 1558-1568.
|
|
He Qing, Lin Jie, Xu Hang. Hybrid Cauchy Mutation and Uniform Distribution of Grasshopper Optimization Algorithm[J]. Control and Decision, 2021, 36(7): 1558-1568.
|
| 26 |
Shi Kangjing, Huang Li, Jiang Du, et al. Path Planning Optimization of Intelligent Vehicle Based on Improved Genetic and Ant Colony Hybrid Algorithm[J]. Frontiers in Bioengineering and Biotechnology, 2022, 10: 905983.
|
 ), 陈静夷, 陈潇阳
), 陈静夷, 陈潇阳