| 1 |
Wei Kun, Ren Bingyin. A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm[J]. Sensors, 2018, 18(2): 571.
|
| 2 |
Xin Jing, Zhao Huan, Liu Ding, et al. Application of Deep Reinforcement Learning in Mobile Robot Path Planning[C]//2017 Chinese Automation Congress (CAC). Piscataway: IEEE, 2017: 7112-7116.
|
| 3 |
Li Yue, Zhao Jianyou, Chen Zenghua, et al. A Robot Path Planning Method Based on Improved Genetic Algorithm and Improved Dynamic Window Approach[J]. Sustainability, 2023, 15(5): 4656.
|
| 4 |
陈洋, 赵新刚, 韩建达. 移动机器人3维路径规划方法综述[J]. 机器人, 2010, 32(4): 568-576.
|
|
Chen Yang, Zhao Xingang, Han Jianda. Review of 3D Path Planning Methods for Mobile Robot[J]. Robot, 2010, 32(4): 568-576.
|
| 5 |
Sundarraj Subaselvi, Vijaya Kumar Reddy R, Mahesh Babu Basam, et al. Route Planning for an Autonomous Robotic Vehicle Employing a Weight-controlled Particle Swarm-optimized Dijkstra Algorithm[J]. IEEE Access, 2023, 11: 92433-92442.
|
| 6 |
Li Weimin, Wang Lei, Zou Awei, et al. Path Planning for UAV Based on Improved PRM[J]. Energies, 2022, 15(19): 7267.
|
| 7 |
Xin Peng, Wang Xiaomin, Liu Xiaoli, et al. Improved Bidirectional RRT* Algorithm for Robot Path Planning[J]. Sensors, 2023, 23(2): 1041.
|
| 8 |
Wang Qian, Li Junli, Yang Liwei, et al. Distributed Multi-mobile Robot Path Planning and Obstacle Avoidance Based on ACO-DWA in Unknown Complex Terrain[J]. Electronics, 2022, 11(14): 2144.
|
| 9 |
Zheng Li, Yu Wenjie, Li Guangxu, et al. Particle Swarm Algorithm Path-planning Method for Mobile Robots Based on Artificial Potential Fields[J]. Sensors, 2023, 23(13): 6082.
|
| 10 |
胡琴, 赵一亭, 夏方平, 等. 基于Soft-Actor-Critic算法的机器人局部路径规划算法[J]. 武汉理工大学学报, 2021, 43(9): 79-84.
|
|
Hu Qin, Zhao Yiting, Xia Fangping, et al. Robot Local Path Planning Algorithm Based on Soft-actor-critic Algorithm[J]. Journal of Wuhan University of Technology, 2021, 43(9): 79-84.
|
| 11 |
张柏鑫, 杨毅镔, 朱华中, 等. 基于深度强化学习的移动机器人动态路径规划算法[J]. 计算机测量与控制, 2023, 31(1): 153-159, 166.
|
|
Zhang Baixin, Yang Yibin, Zhu Huazhong, et al. Dynamic Path Planning Algorithm of Mobile Robot Based on Deep Reinforcement Learning[J]. Computer Measurement & Control, 2023, 31(1): 153-159, 166.
|
| 12 |
杨来义, 毕敬, 苑海涛. 基于SAC算法的移动机器人智能路径规划[J]. 系统仿真学报, 2023, 35(8): 1726-1736.
|
|
Yang Laiyi, Bi Jing, Yuan Haitao. Intelligent Path Planning for Mobile Robots Based on SAC Algorithm[J]. Journal of System Simulation, 2023, 35(8): 1726-1736.
|
| 13 |
Zhan Shi, Zhang Tingting, Lei Han, et al. Research on Path Planning of Mobile Robot Based on Deep Reinforcement Learning[C]//Big Data and Security. Singapore: Springer Singapore, 2021: 549-560.
|
| 14 |
Yang Yang, Li Juntao, Peng Lingling. Multi-robot Path Planning Based on a Deep Reinforcement Learning DQN Algorithm[J]. CAAI Transactions on Intelligence Technology, 2020, 5(3): 177-183.
|
| 15 |
Gao Junli, Ye Weijie, Guo Jing, et al. Deep Reinforcement Learning for Indoor Mobile Robot Path Planning[J]. Sensors, 2020, 20(19): 5493.
|
| 16 |
闫皎洁, 张锲石, 胡希平. 基于强化学习的路径规划技术综述[J]. 计算机工程, 2021, 47(10): 16-25.
|
|
Yan Jiaojie, Zhang Qieshi, Hu Xiping. Review of Path Planning Techniques Based on Reinforcement Learning[J]. Computer Engineering, 2021, 47(10): 16-25.
|
| 17 |
Schulman J, Wolski F, Dhariwal P, et al. Proximal Policy Optimization Algorithms[EB/OL]. (2017-08-28) [2024-01-18]. .
|
| 18 |
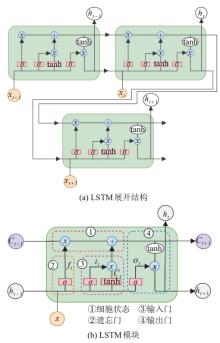
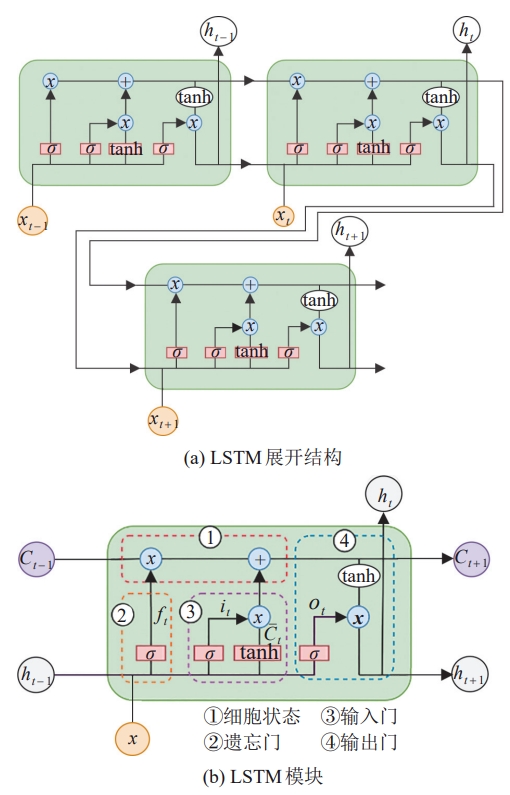
Hochreiter Sepp, Schmidhuber Jürgen. Long Short-term Memory[J]. Neural Computation, 1997, 9(8): 1735-1780.
|
| 19 |
Gers Felix A, Schraudolph Nicol N, Schmidhuber Jürgen. Learning Precise Timing with LSTM Recurrent Networks[J]. The Journal of Machine Learning Research, 2002, 3: 115-143.
|
| 20 |
刘国名, 李彩虹, 李永迪, 等. 基于改进PPO算法的机器人局部路径规划[J]. 计算机工程, 2023, 49(2): 119-126, 135.
|
|
Liu Guoming, Li Caihong, Li Yongdi, et al. Local Path Planning of Robot Based on Improved PPO Algorithm[J]. Computer Engineering, 2023, 49(2): 119-126, 135.
|
| 21 |
林俊强, 王红军, 邹湘军, 等. 基于DPPO的移动采摘机器人避障路径规划及仿真[J]. 系统仿真学报, 2023, 35(8): 1692-1704.
|
|
Lin Junqiang, Wang Hongjun, Zou Xiangjun, et al. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO[J]. Journal of System Simulation, 2023, 35(8): 1692-1704.
|