

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (4): 889-902.doi: 10.16182/j.issn1004731x.joss.24-0983
• Papers • Previous Articles Next Articles
Meng Wenlong1, Pu Yanbo1, Gong Ya2
Received:2024-09-04
Revised:2024-10-07
Online:2026-04-20
Published:2026-04-22
CLC Number:
Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments[J]. Journal of System Simulation, 2026, 38(4): 889-902.
Fig. 1
Flowchart of path planning using rolling optimization in unknown environments
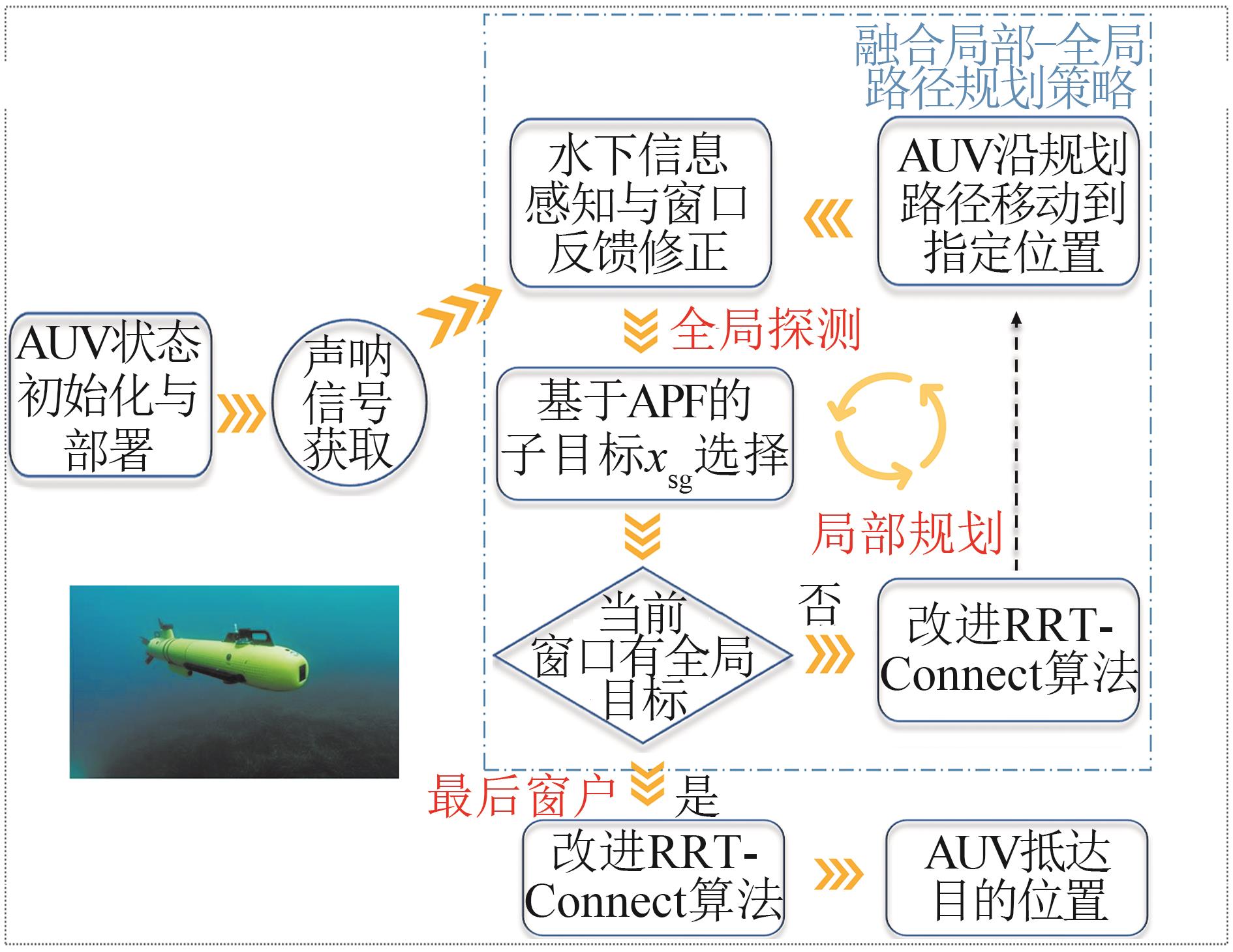
Fig. 2
Path planning process using the proposed algorithm in unknown environments
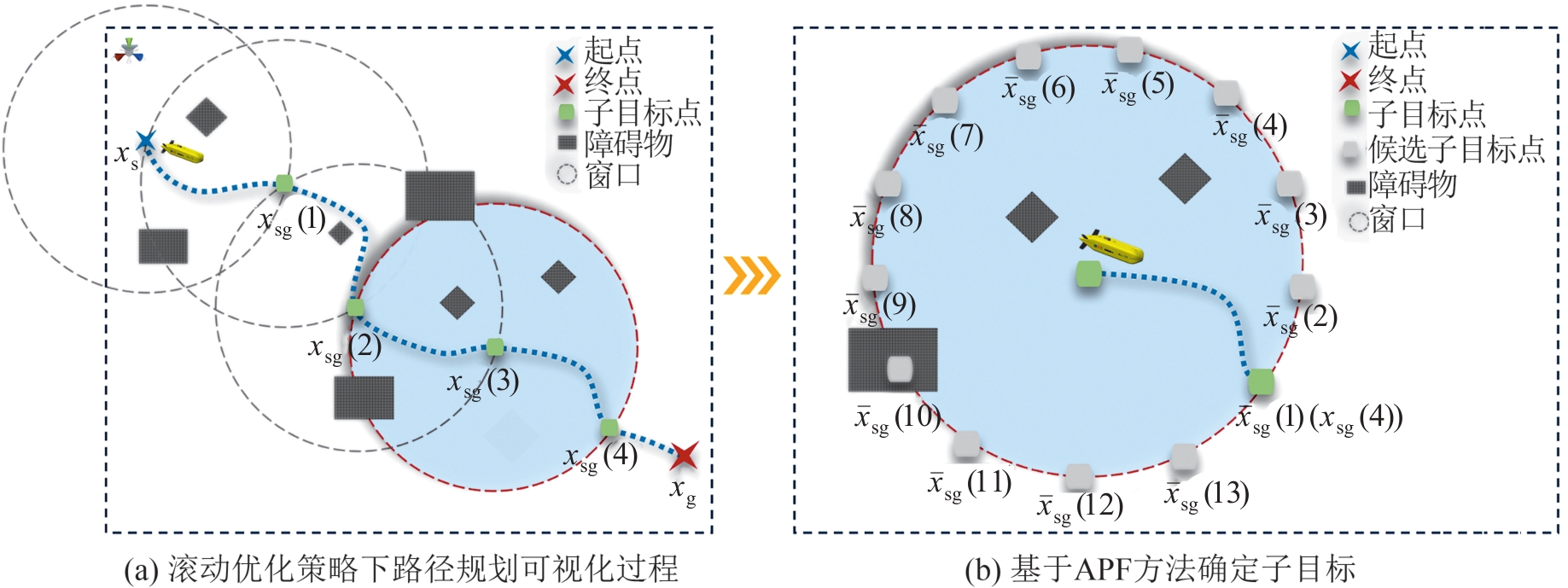
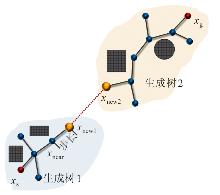
Fig. 3
Basic RRT-Connect algorithm
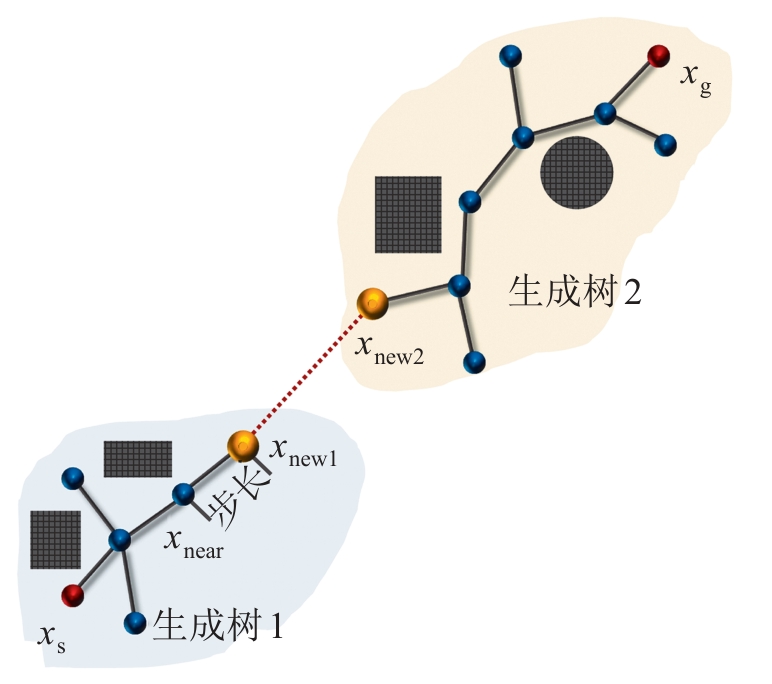
Fig. 4
Circle sampling
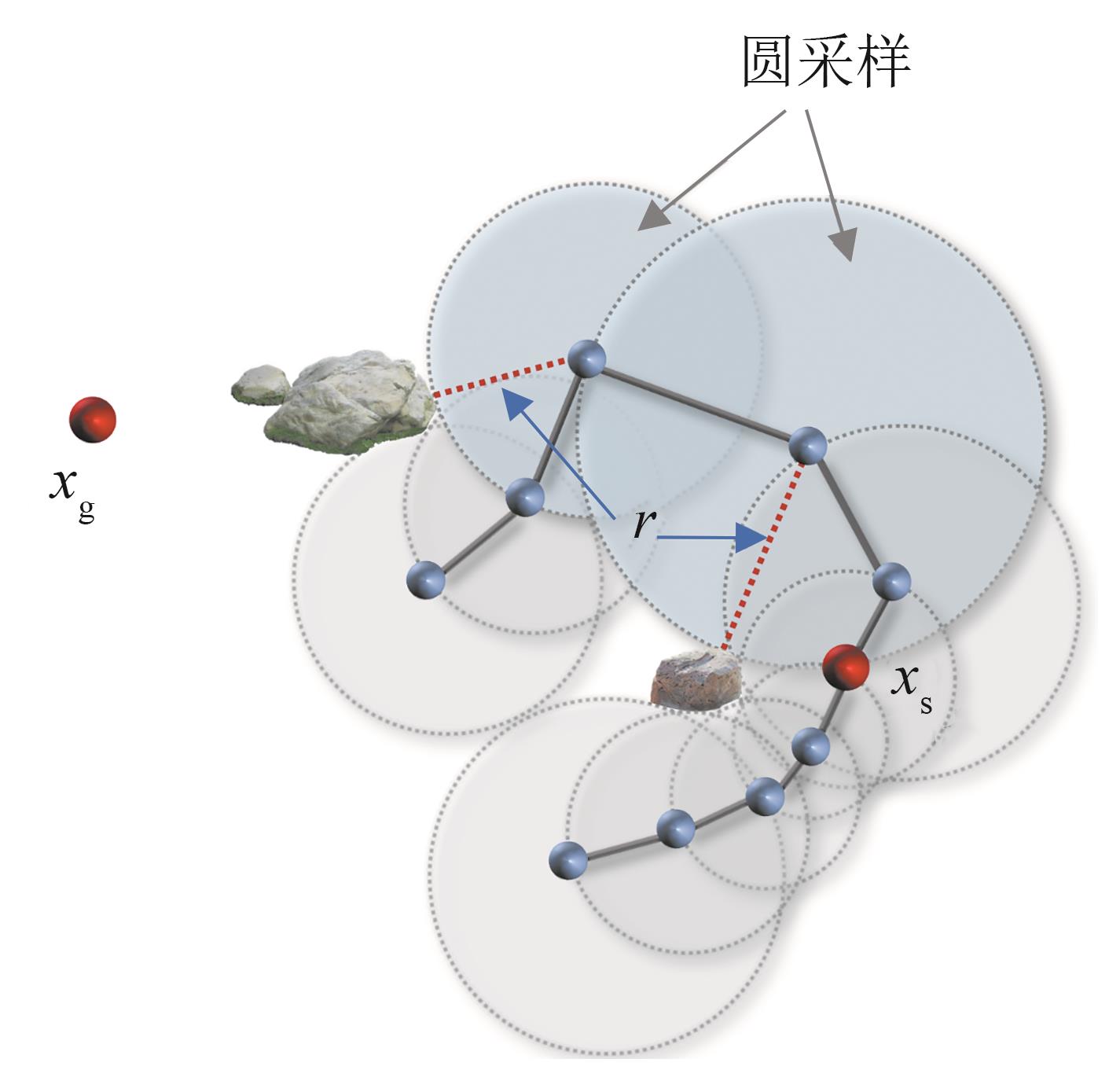
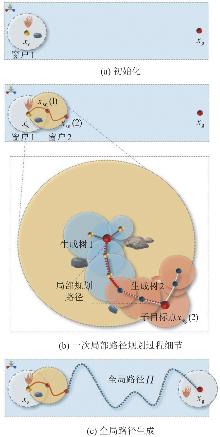
Fig. 5
Algorithm pipeline
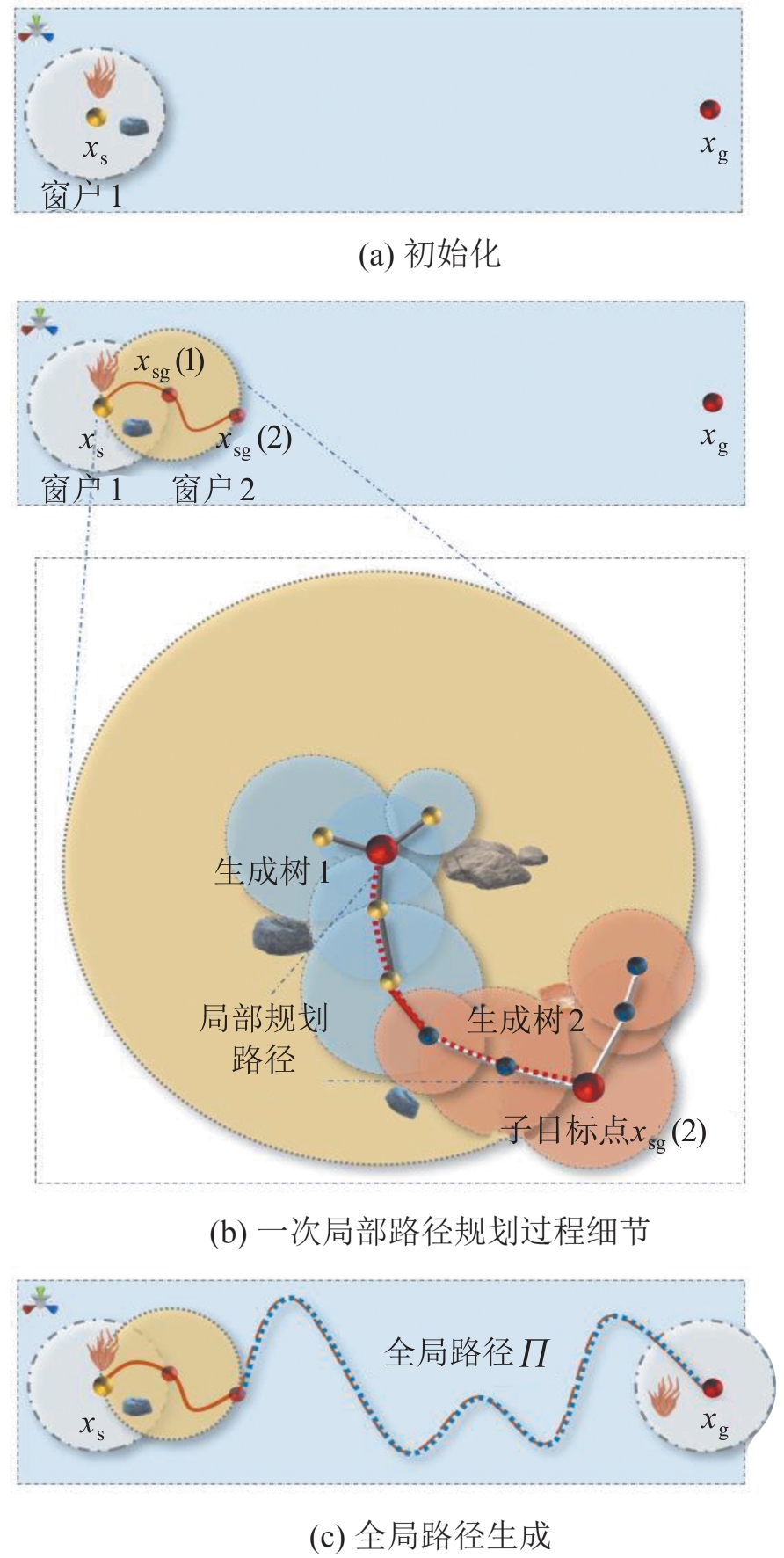
Table 1
Simulation parameters
| 主要仿真参数 | 量值 |
|---|---|
| 排斥系数 | 1.5 |
| 排斥效应上限 | 160 |
| 排斥效应下限 | 5 |
| 候选子目标点数 | 10 |
| 滚动窗口半径 | 100 |
| 固定步长 | 30 |
| 最大迭代次数 | 1 000 |
| 每一场景测试次数 | 50 |
| 重连搜索半径 | 20 |

Fig. 6
Maps used in experimental simulation
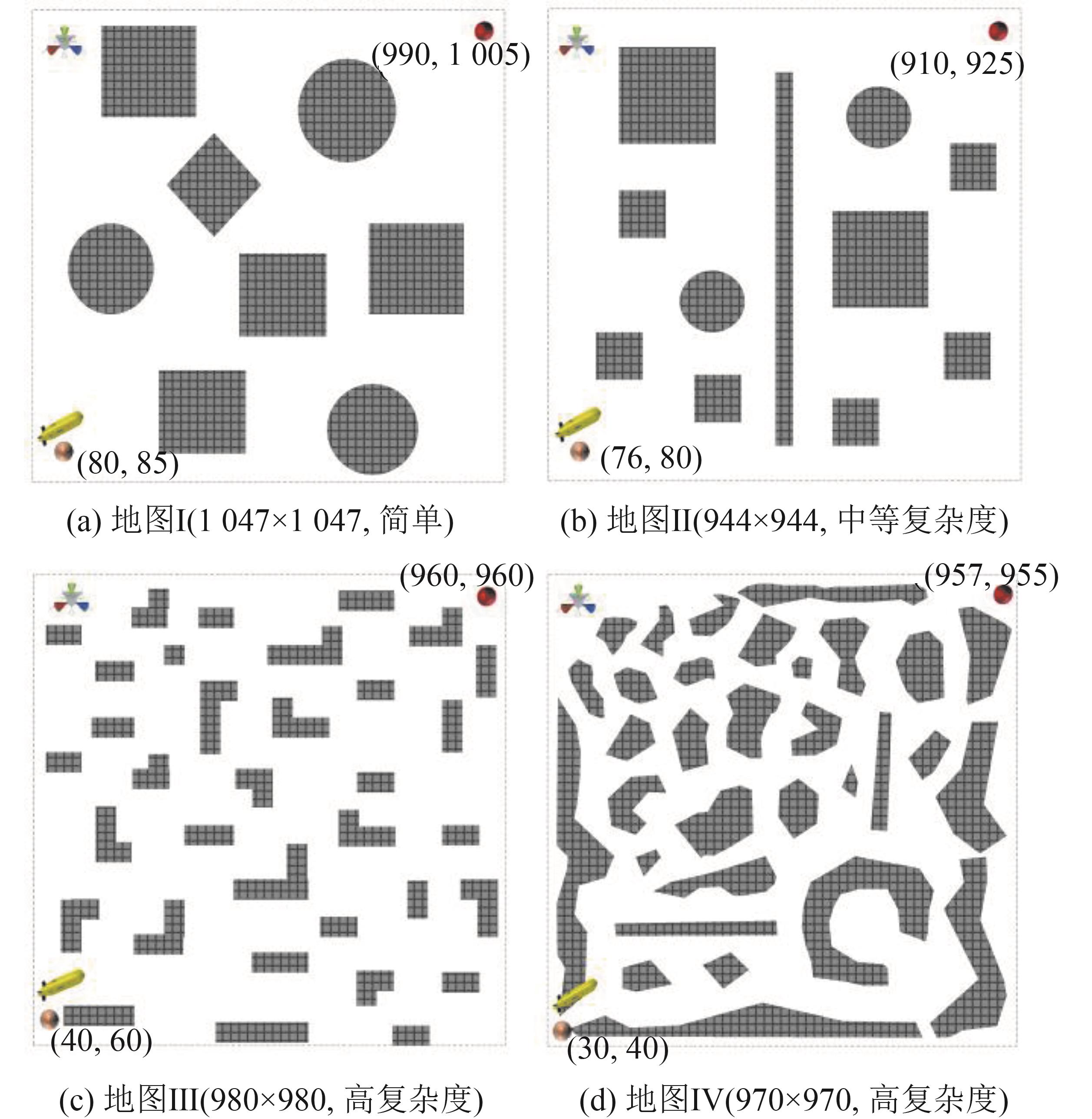
Table 2
Simulation results of four map scenarios
| 方法 | 评价指标 | 地图I | 地图II | 地图III | 地图IV |
|---|---|---|---|---|---|
| 本文 | 平均时间/s 平均长度 | 0.015 1 873 | 0.029 1 775 | 0.054 1 658 | 0.112 2 062 |
| 文献[ | 平均时间/s 平均长度 | 0.263 1 915 | 0.437 1 814 | 0.635 1 766 | 0.844 2 151 |
| 文献[ | 平均时间/s 平均长度 | 0.668 1 964 | 0.585 1 834 | 0.822 1 887 | 1.279 2 196 |
| 文献[ | 平均时间/s 平均长度 | 0.134 1 856 | 0.114 1 746 | 0.167 1 680 | 0.366 2 145 |
| 文献[ | 平均时间/s 平均长度 | 1.439 2 060 | 1.411 1 987 | 2.601 2 043 | 4.031 2 242 |
Fig. 7
Simulation results of the proposed method
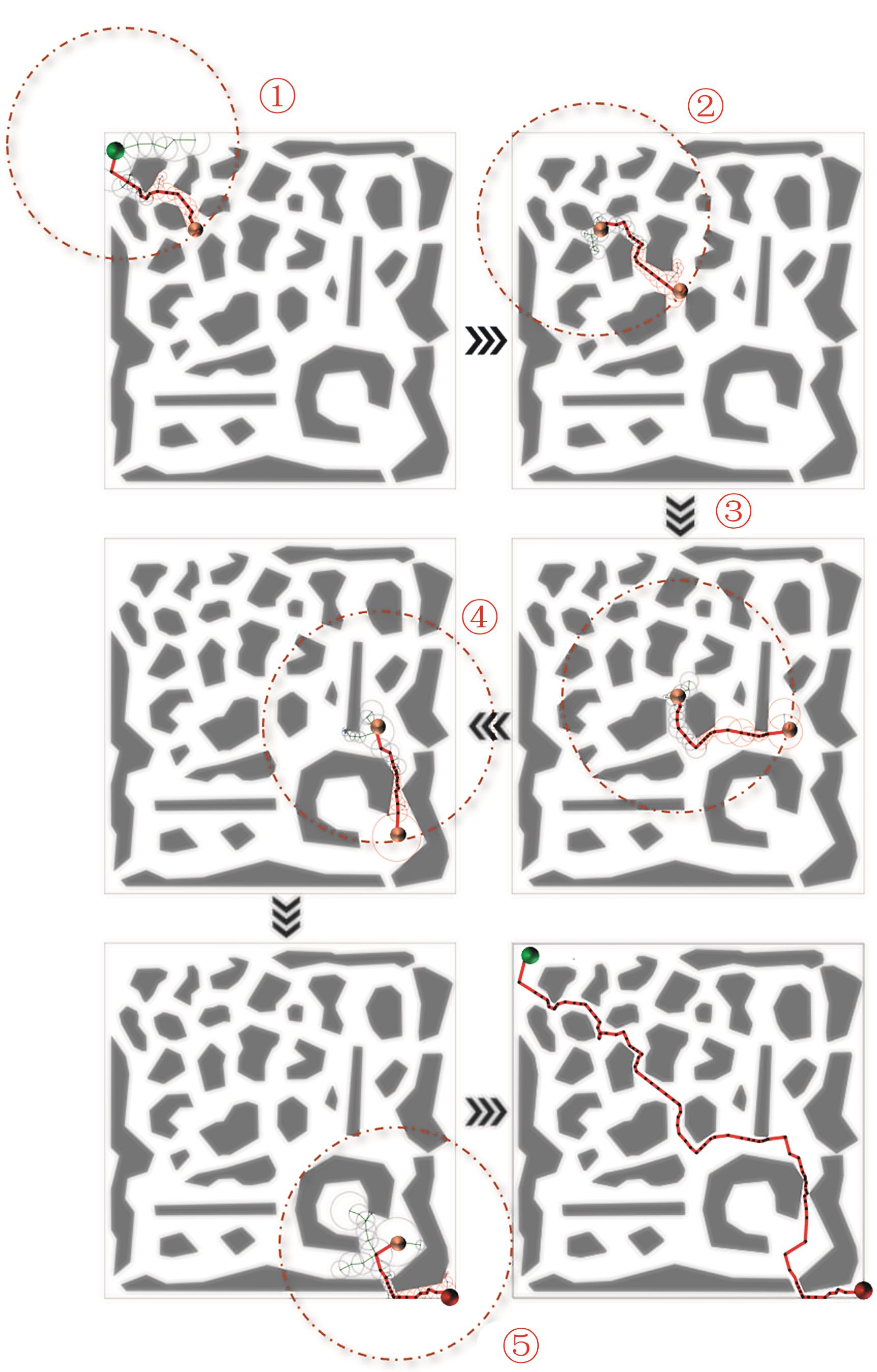
Table 3
Effect of sonar detection range
| 探测范围/m | 地图I | 地图III | ||
|---|---|---|---|---|
| 时间/ms | 长度 | 时间/ms | 长度 | |
| 10 | 124 | 2 021 | 247 | 1 889 |
| 50 | 47 | 1 982 | 123 | 1 752 |
| 100 | 15 | 1 873 | 54 | 1 658 |
| 200 | 11 | 1 733 | 36 | 1 564 |
| 400 | 7 | 1 654 | 19 | 1 497 |
| 1 000 | 4 | 1 564 | 11 | 1 354 |
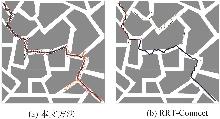
Fig. 8
Comparison of two methods in complex environments
Fig. 9
Comparison of two methods in narrow environments
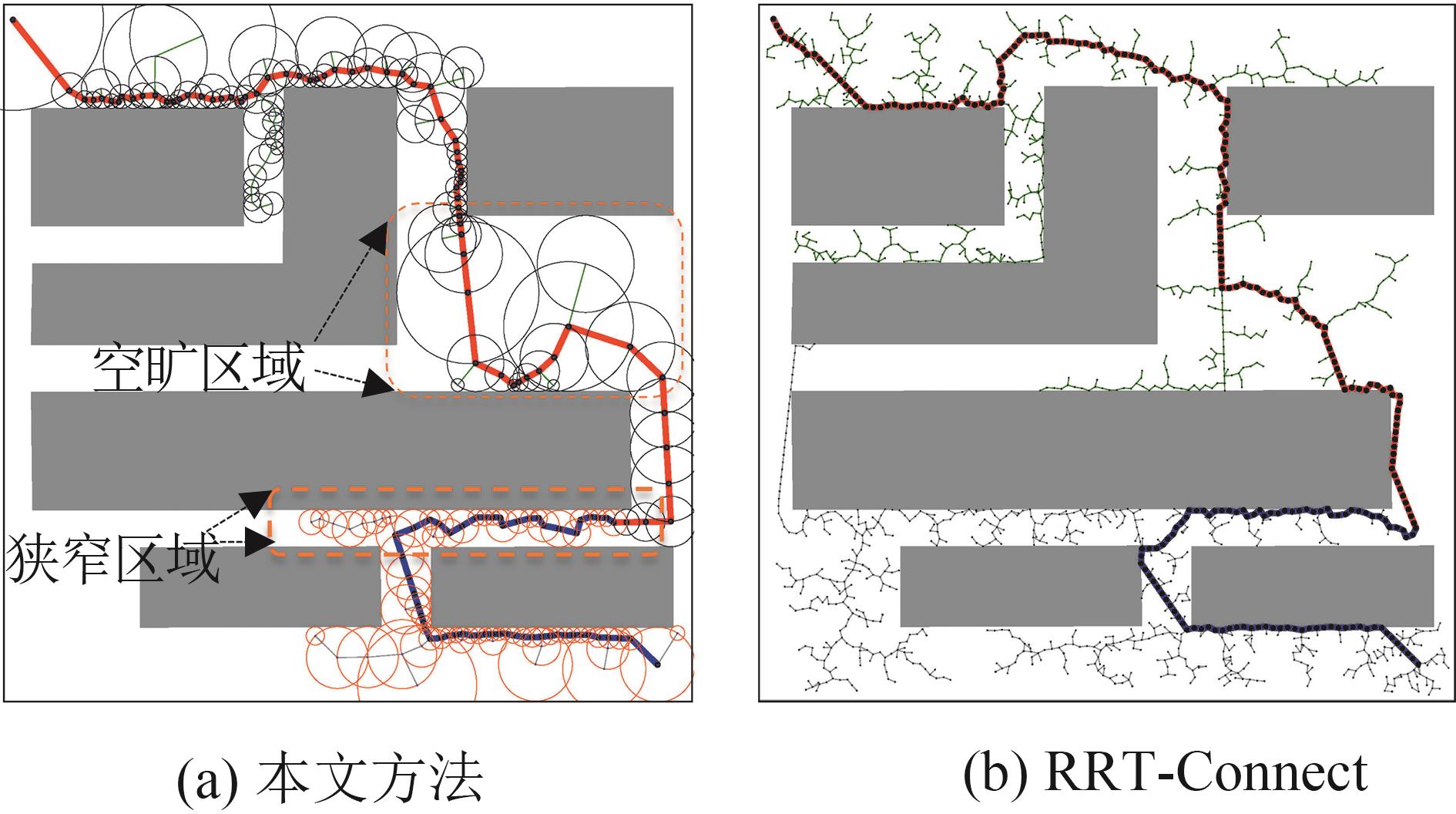

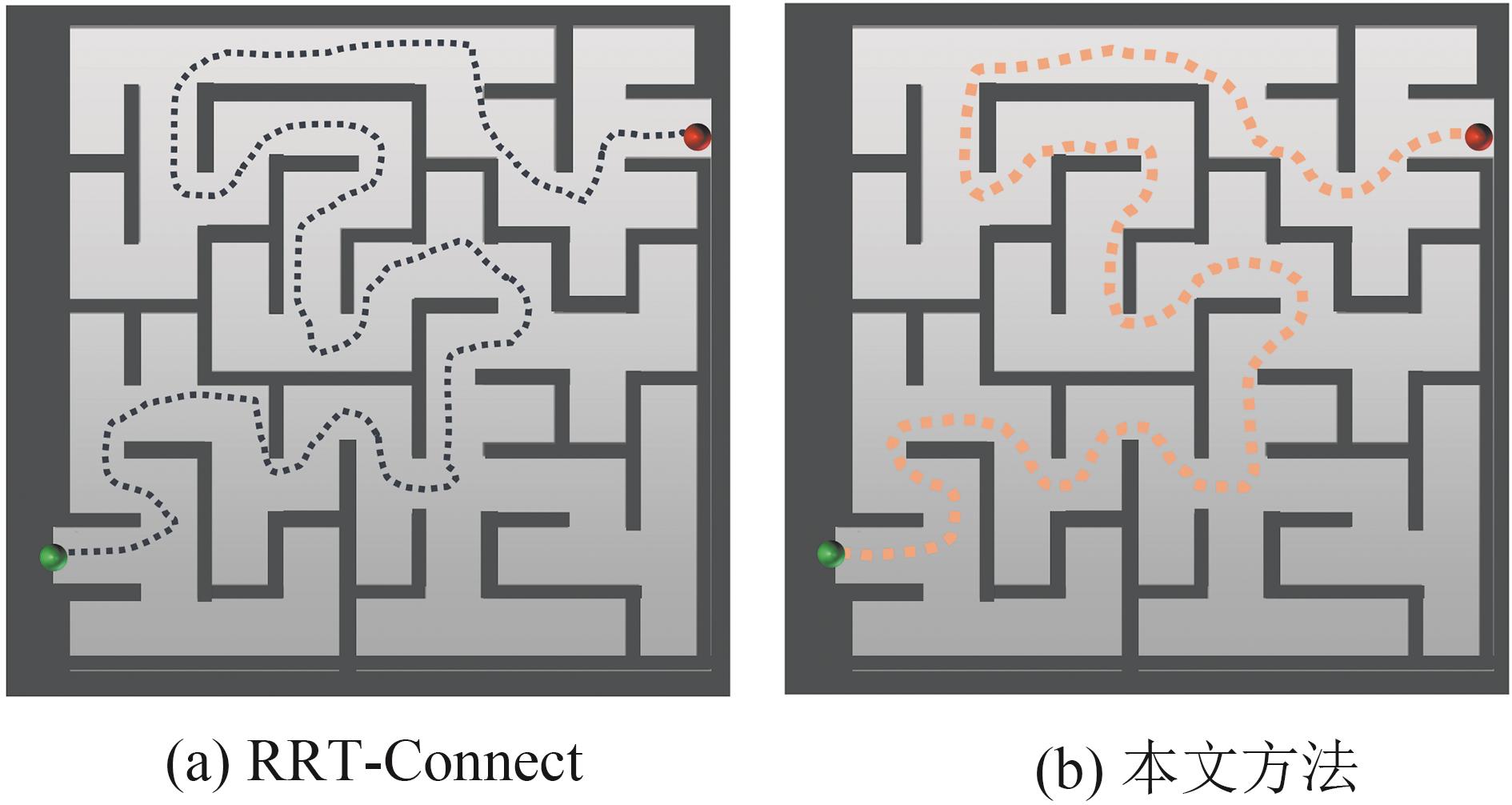
Fig. 10
Comparison of the proposed method with traditional RRT and its variants
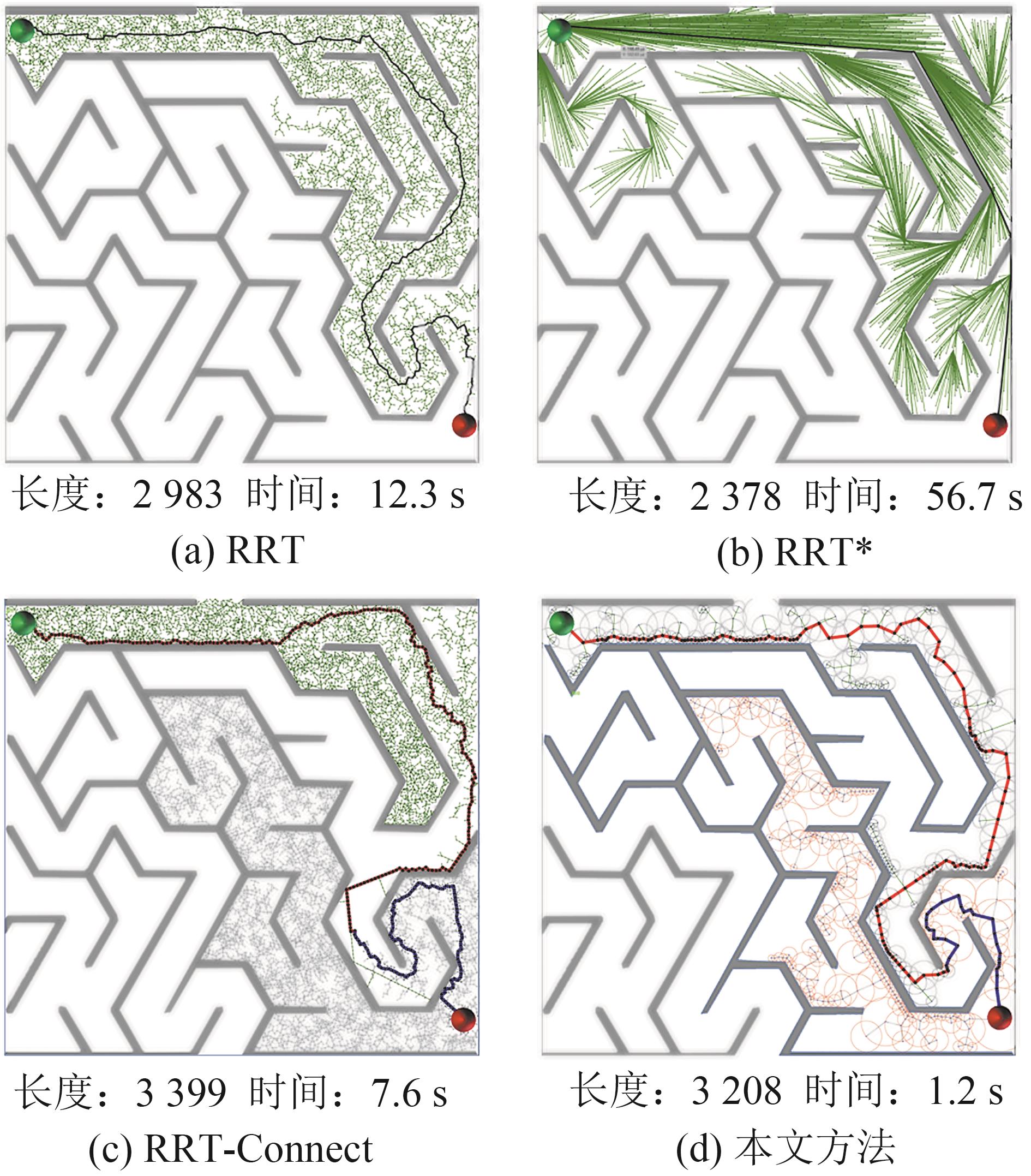
Table 4
Comparison from different RRT algorithms
| 方法 | 评价指标 | 地图I | 地图III |
|---|---|---|---|
| 本文方法 | 平均时间/ms | 1.74 | 2.91 |
| 平均长度 | 1 582 | 1 481 | |
| RRT[ | 平均时间/ms | 45.12 | 87.96 |
| 平均长度 | 1 656 | 1 698 | |
| RRT-Connect[ | 平均时间/ms | 3.38 | 5.6 |
| 平均长度 | 1 609 | 1 507 | |
| RRT*[ | 平均时间/ms | 3 613.24 | 10 329.6 |
| 平均长度 | 1 335 | 1 281 |

Fig. 11
Gazebo simulation environment
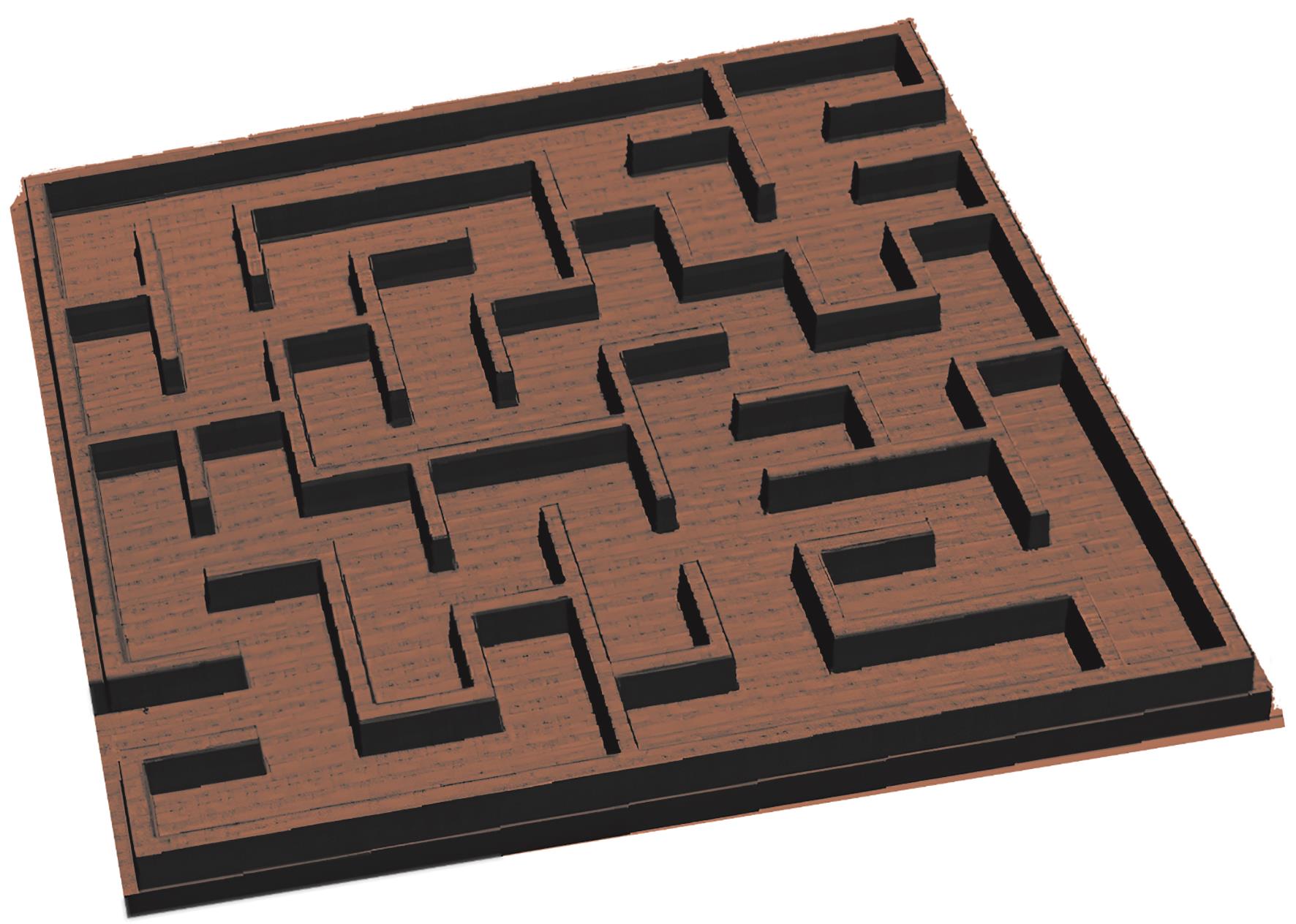
Fig. 12
Path planning results of two algorithms
| [1] | Sina Sharif Mansouri, Kanellakis Christoforos, Fresk Emil, et al. Cooperative Coverage Path Planning for Visual Inspection[J]. Control Engineering Practice, 2018, 74: 118-131. |
| [2] | Beck Zoltán, Teacy W, Rogers A, et al. Online Planning for Collaborative Search and Rescue by Heterogeneous Robot Teams[C]// Proceedings of the 2016 International Conference on Autonomous Agents & Multiagent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2016: 1024-1033. |
| [3] | Kanellakis Christoforos, Sina Sharif Mansouri, Georgoulas George, et al. Towards Autonomous Surveying of Underground Mine Using MAVs[C]//Advances in Service and Industrial Robotics. Cham: Springer International Publishing, 2019: 173-180. |
| [4] | Carreras Marc, Juan David Hernández, Vidal Eduard, et al. Sparus II AUV-a Hovering Vehicle for Seabed Inspection[J]. IEEE Journal of Oceanic Engineering, 2018, 43(2): 344-355. |
| [5] | Oral Tugcem, Polat Faruk. MOD* Lite: An Incremental Path Planning Algorithm Taking Care of Multiple Objectives[J]. IEEE Transactions on Cybernetics, 2016, 46(1): 245-257. |
| [6] | 李娟, 张子浩, 张宏瀚. 复杂环境下DWA与RRT算法融合的AUV局部路径规划[J]. 智能系统学报, 2024, 19(4): 961-973. |
| Li Juan, Zhang Zihao, Zhang Honghan. Local Path Planning for AUV with Fusion of DWA and RRT Algorithms in a Complex Environment[J]. CAAI Transactions on Intelligent Systems, 2024, 19(4): 961-973. | |
| [7] | 张季然, 陈德山, 李廷文, 等. 面向水下未知空间探测的改进RRT路径搜索算法[J]. 武汉理工大学学报(交通科学与工程版), 2023, 47(2): 256-262. |
| Zhang Jiran, Chen Deshan, Li Tingwen, et al. An Improved RRT Path Search Algorithm for Underwater Unknown Space Detection[J]. Journal of Wuhan University of Technology(Transportation Science & Engineering), 2023, 47(2): 256-262. | |
| [8] | Meng Wenlong, Gong Ya, Xu Fan, et al. Efficient Path Planning for AUVs in Unmapped Marine Environments Using a Hybrid Local-global Strategy[J]. Ocean Engineering, 2023, 288, Part 2: 116227. |
| [9] | Orozco-Rosas Ulises, Montiel Oscar, Sepúlveda Roberto. Mobile Robot Path Planning Using Membrane Evolutionary Artificial Potential Field[J]. Applied Soft Computing, 2019, 77: 236-251. |
| [10] | Fan Xiaojing, Guo Yinjing, Liu Hui, et al. Improved Artificial Potential Field Method Applied for AUV Path Planning[J]. Mathematical Problems in Engineering, 2020, 2020(1): 6523158. |
| [11] | Chen Yongbo, Luo Guanchen, Mei Yuesong, et al. UAV Path Planning Using Artificial Potential Field Method Updated by Optimal Control Theory[J]. International Journal of Systems Science, 2016, 47(6): 1407-1420. |
| [12] | Min Gyu Park, Jae Hyun Jeon, Min Cheol Lee. Obstacle Avoidance for Mobile Robots Using Artificial Potential Field Approach with Simulated Annealing[C]//ISIE 2001. 2001 IEEE International Symposium on Industrial Electronics Proceedings. Piscataway: IEEE, 2001: 1530-1535. |
| [13] | Min Gyu Park, Min Cheol Lee. A New Technique to Escape Local Minimum in Artificial Potential Field Based Path Planning[J]. KSME International Journal, 2003, 17(12): 1876-1885. |
| [14] | Zhang Chungang, Xi Yugeng. Robot Path Planning in Globally Unknown Environments Based on Rolling Windows[J]. Science in China Series E: Technolgical Science, 2001, 44(2): 131-139. |
| [15] | 张纯刚, 席裕庚. 基于局部探测信息的机器人滚动路径规划[J]. 自动化学报, 2003, 29(1): 38-44. |
| Zhang Chungang, Xi Yugeng. Robot Rolling Path Planning Based on Locally Detected Information[J]. Acta Automatica Sinica, 2003, 29(1): 38-44. | |
| [16] | Zhang Yalong, Liu Zhenghua, Chang Le. A New Adaptive Artificial Potential Field and Rolling Window Method for Mobile Robot Path Planning[C]//2017 29th Chinese Control and Decision Conference (CCDC). Piscataway: IEEE, 2017: 7144-7148. |
| [17] | Li Caihong, Wang Fengying, Song Yong, et al. A Complete Coverage Path Planning Algorithm for Mobile Robot Based on FSM and Rolling Window Approach in Unknown Environment[C]//2015 34th Chinese Control Conference (CCC). Piscataway: IEEE, 2015: 5881-5885. |
| [18] | Chu Zhenzhong, Wang Fulun, Lei Tingjun, et al. Path Planning Based on Deep Reinforcement Learning for Autonomous Underwater Vehicles Under Ocean Current Disturbance[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(1): 108-120. |
| [19] | Hadi Behnaz, Khosravi Alireza, Sarhadi P. Deep Reinforcement Learning for Adaptive Path Planning and Control of an Autonomous Underwater Vehicle[J]. Applied Ocean Research, 2022, 129: 103326. |
| [20] | Li Zhaolun, Luo Xiaonan. Autonomous Underwater Vehicles (AUVs) Path Planning Based on Deep Reinforcement Learning[C]//2022 9th International Conference on Digital Home (ICDH). Piscataway: IEEE, 2022: 257-262. |
| [21] | Carlos E García, Prett D M, Morari M. Model Predictive Control: Theory and practice-a Survey[J]. Automatica, 1989, 25(3): 335-348. |
| [22] | Kuffner J J, LaValle S M. RRT-connect: An Efficient Approach to Single-query Path Planning[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway: IEEE, 2000: 995-1001. |
| [23] | Garcia Vincent, Debreuve Eric, Barlaud Michel. Fast k Nearest Neighbor Search Using GPU[C]//2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2008: 1-6. |
| [24] | Pan Jia, Lauterbach C, Manocha D. Efficient Nearest-neighbor Computation for GPU-based Motion Planning[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2010: 2243-2248. |
| [25] | Zhao Leyang, Yan Li, Hu Xiao, et al. Efficient and High Path Quality Autonomous Exploration and Trajectory Planning of UAV in an Unknown Environment[J]. ISPRS International Journal of Geo-Information, 2021, 10(10): 631. |
| [26] | Li Juan, Li Chengyue, Chen Tao, et al. Improved RRT Algorithm for AUV Target Search in Unknown 3D Environment[J]. Journal of Marine Science and Engineering, 2022, 10(6): 826. |
| [27] | Yu Jiabin, Yang Meng, Zhao Zhiyao, et al. Path Planning of Unmanned Surface Vessel in an Unknown Environment Based on Improved D* Lite Algorithm[J]. Ocean Engineering, 2022, 266, Part 3: 112873. |
| [28] | Masehian Ellips, Kakahaji Hossein. NRR: A Nonholonomic Random Replanner for Navigation of Car-like Robots in Unknown Environments[J]. Robotica, 2024, 32(7): 1101-1123. |
| [29] | Lavalle S J R R. Rapidly-exploring Random Trees: A New tool for Path Planning[J]. Research Report, 1998, 98: 11-19. |
| [30] | Karaman S, Frazzoli E. Sampling-based Algorithms for Optimal Motion Planning[J]. International Journal of Robotics Research, 2011, 30(7): 846-894. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [3] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [4] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [5] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [6] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [7] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [8] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [9] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [10] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [11] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [12] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [13] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [14] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [15] | He Zhigang, Li Dayan, Wang Niya, Mao Jianlin, Wang Ning. A Multi-robot Collaborative Path Planning Algorithm with Chain Working Mode [J]. Journal of System Simulation, 2025, 37(4): 953-967. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
