

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (3): 714-724.doi: 10.16182/j.issn1004731x.joss.25-0399
• Papers • Previous Articles Next Articles
Li Dequan1,2, Xiong Wan1
Received:2025-05-09
Revised:2025-07-25
Online:2026-03-18
Published:2026-03-27
CLC Number:
Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM[J]. Journal of System Simulation, 2026, 38(3): 714-724.
Fig. 1
Robot-environment interaction
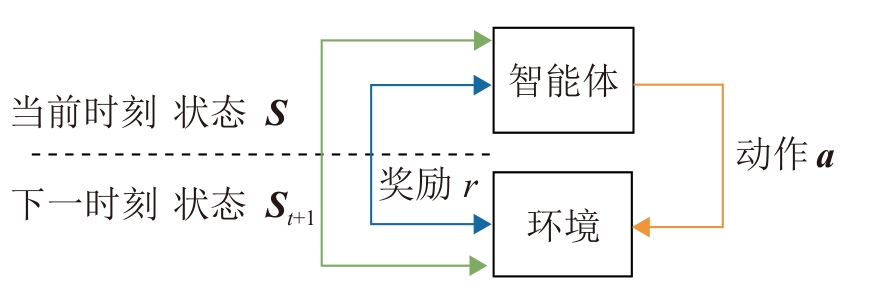

Fig. 2
SAC architecture
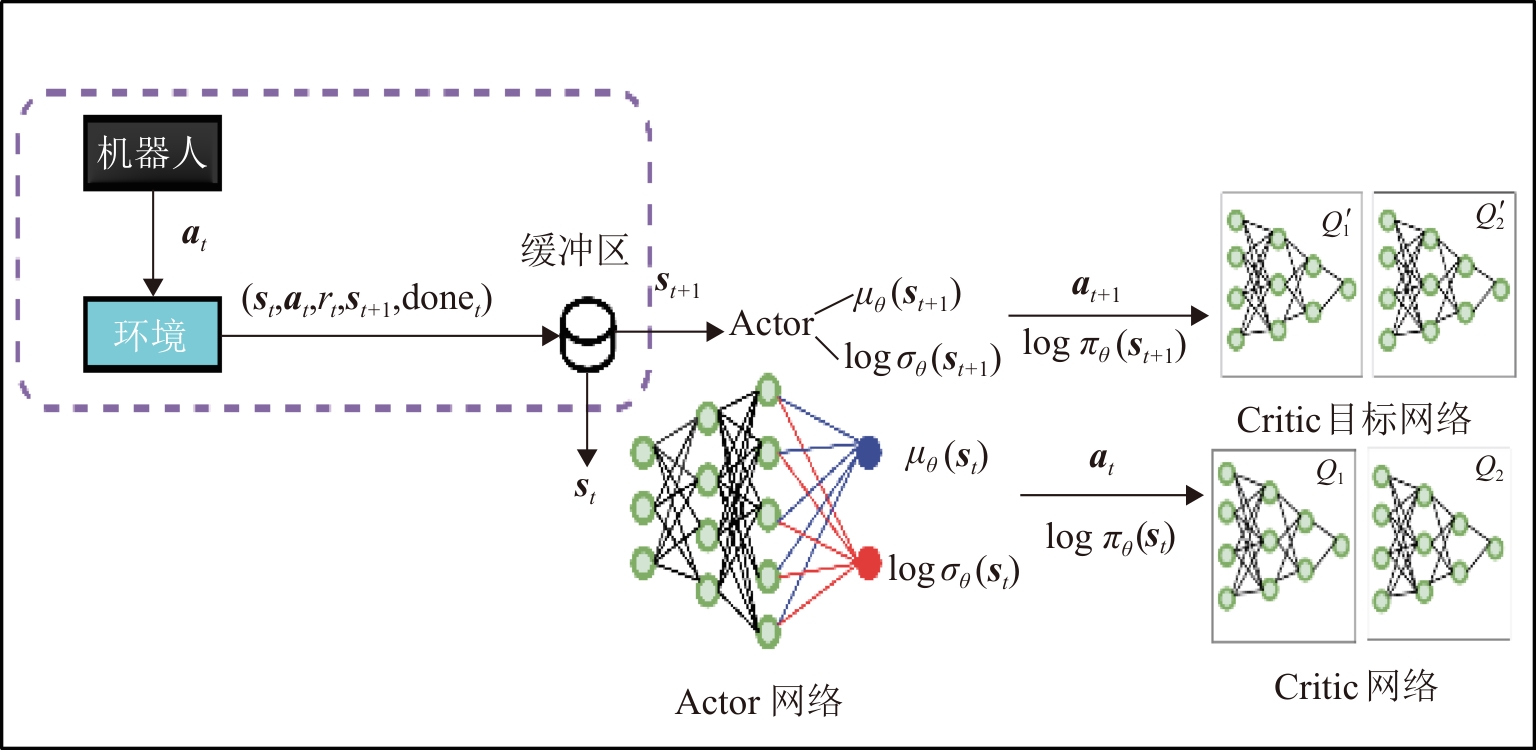
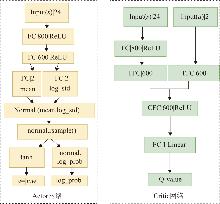
Fig. 3
Network structure diagram
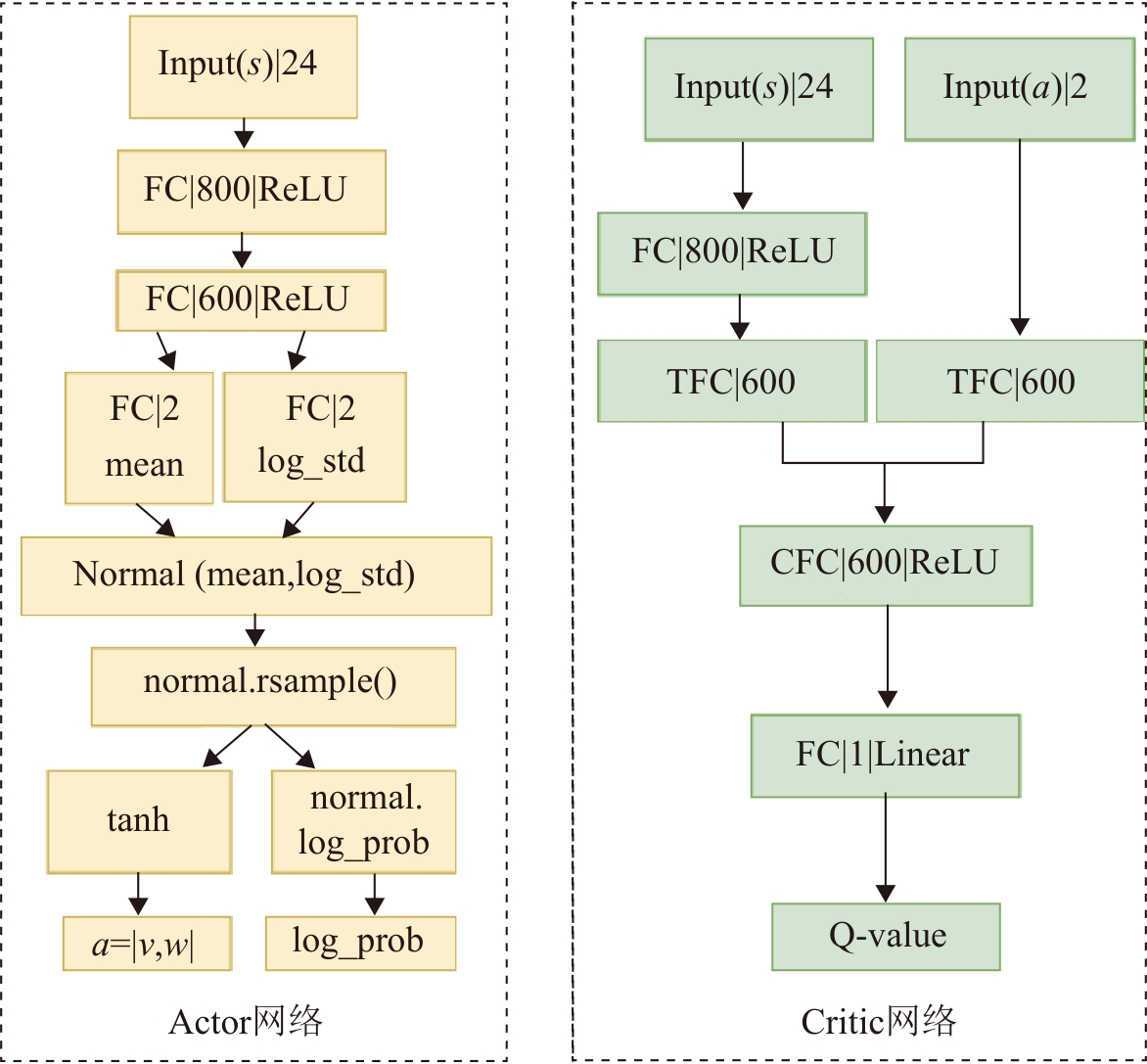
Fig. 4
SAC3Q-HDM structure diagram
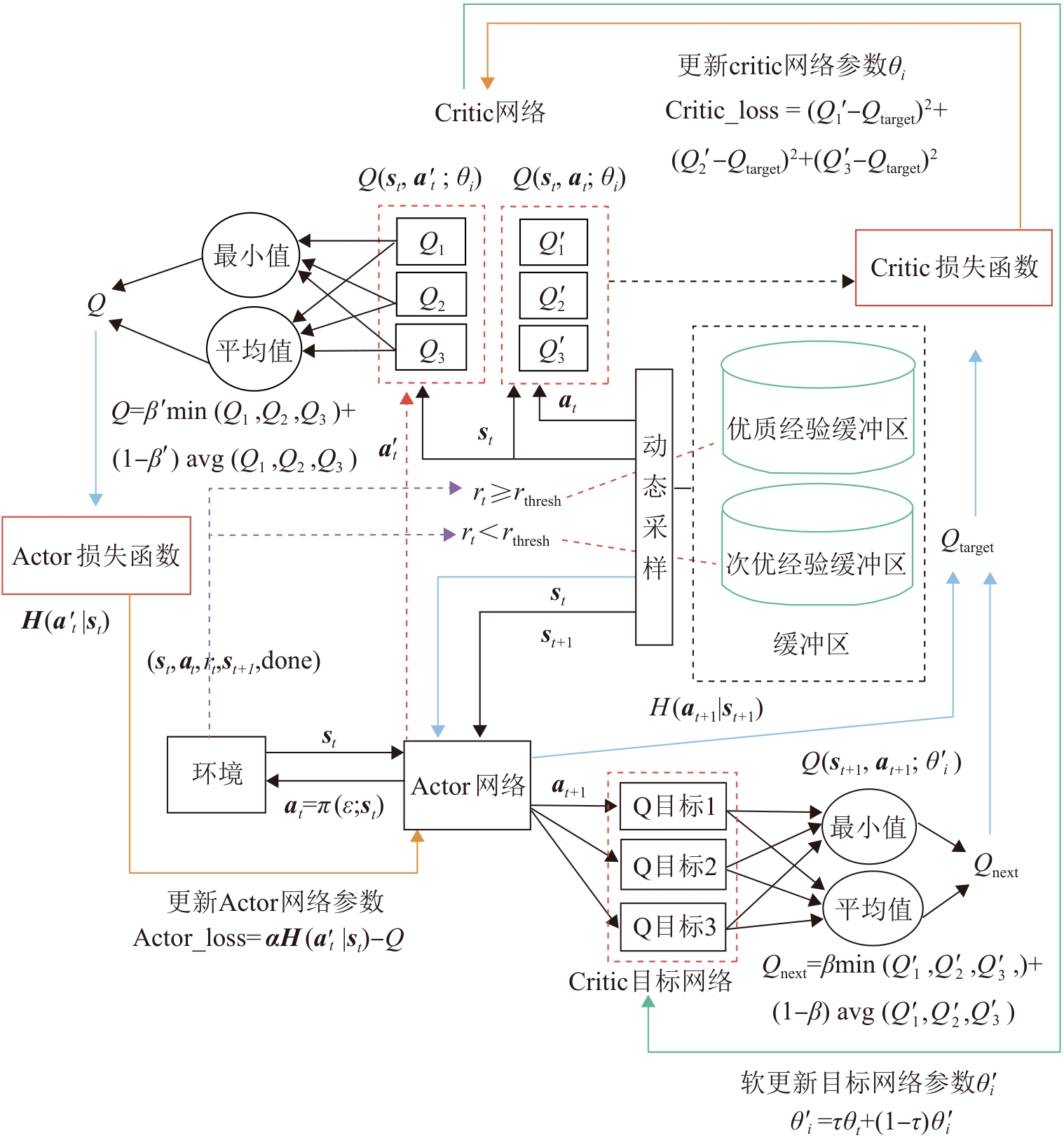

Fig. 5
Experimental environment
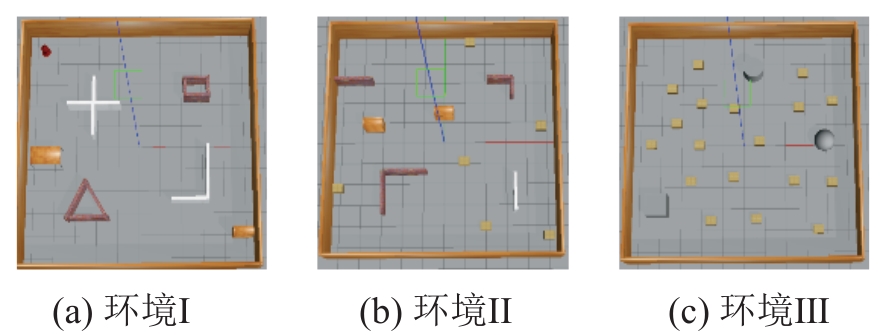
Table 1
Experimental parameters
| 主要参数 | 量值 |
|---|---|
| 训练总周期 | 2 500 |
| 学习率 | 0.000 3 |
| 缓冲区大小 | 300 000 |
| 采样批量大小 | 128 |
| 软更新参数 | 0.005 |
| 奖励阈值 | -0.3 |
| 平滑系数 | 0.5 |
| 比例系数 | 10 |
Fig. 6
Reward metrics
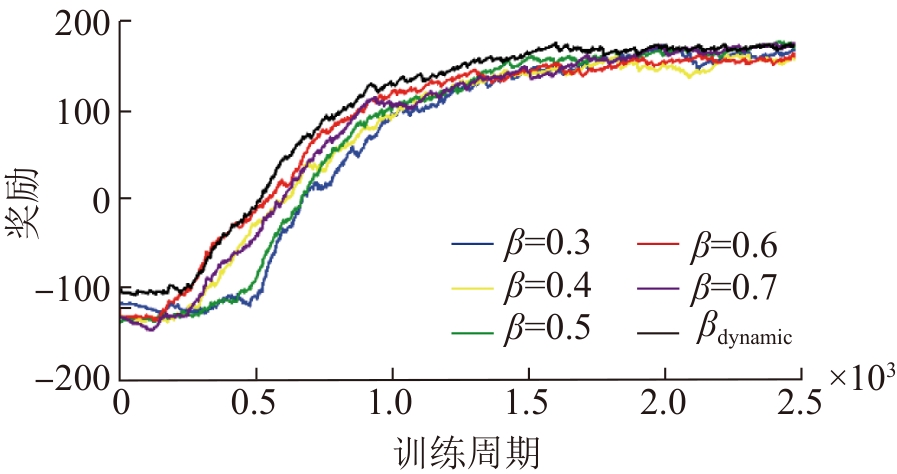
Fig. 7
Step metrics
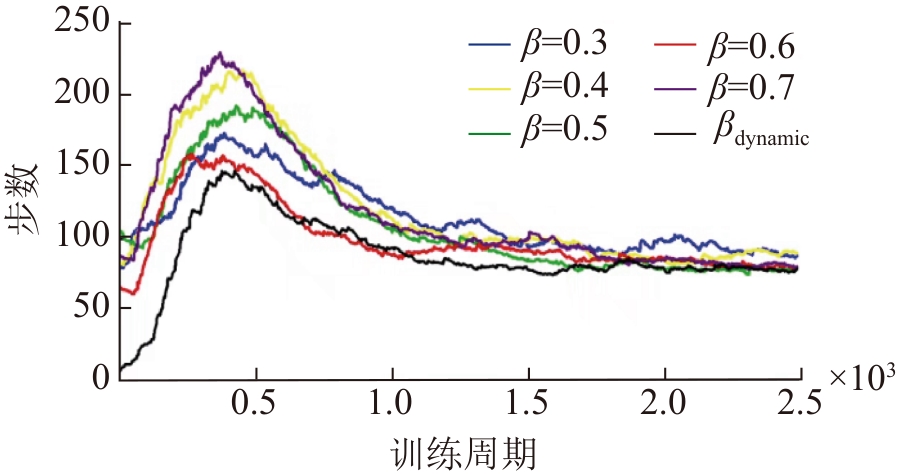
Fig. 8
Training reward
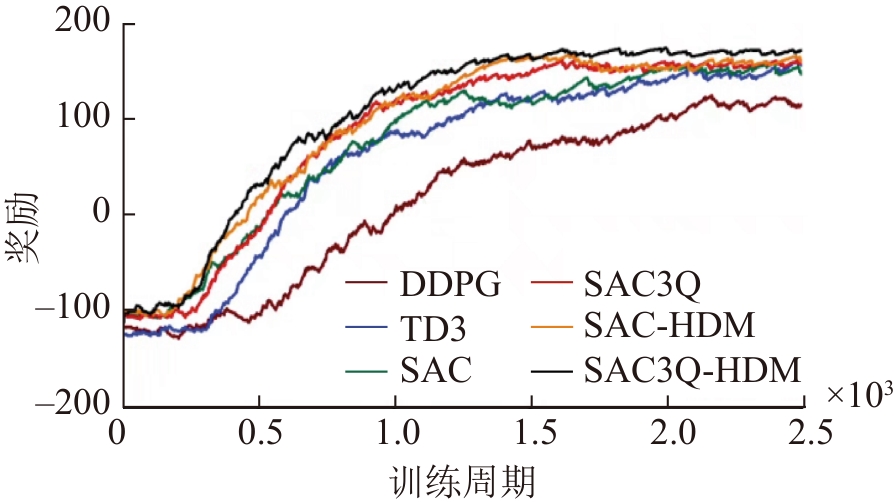
Fig. 9
Training step
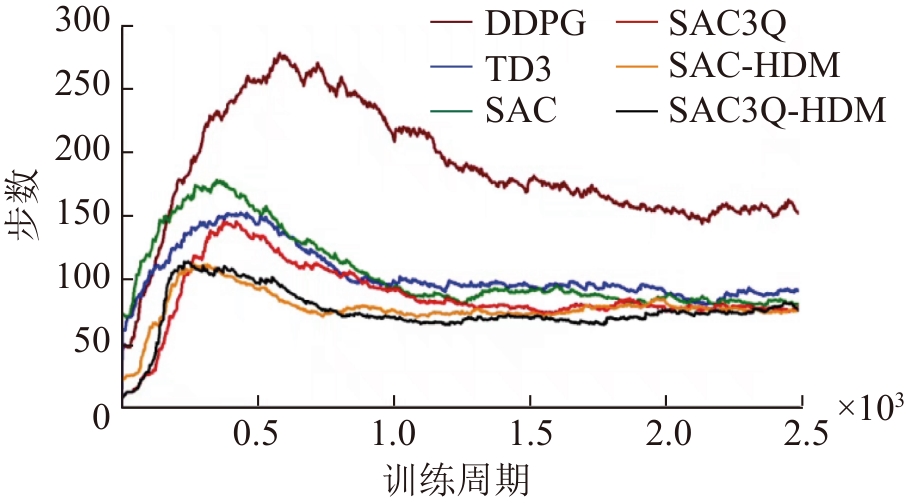
Fig. 10
Success rate
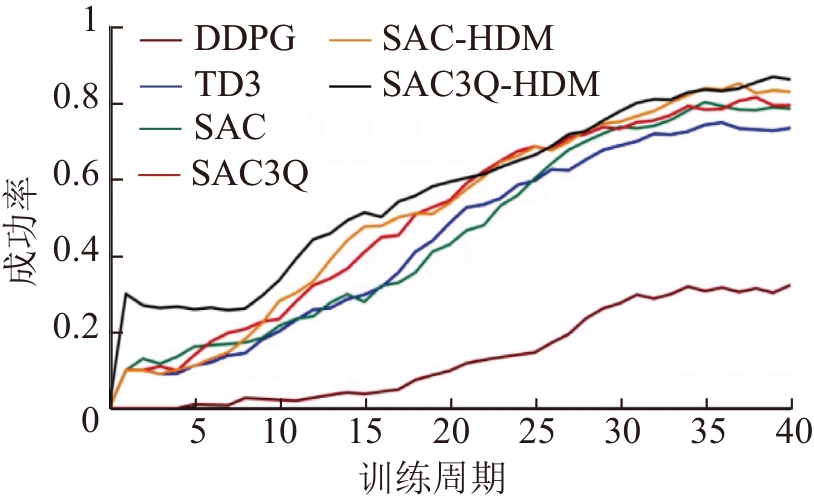
Table 2
Training results
| 算法 | 训练总步数 | 奖励 | 步数 | 成功率 |
|---|---|---|---|---|
| DDPG | 475 342 | 100~110 | 140~160 | 0.30~0.40 |
| TD3 | 288 016 | 150~155 | 90~100 | 0.65~0.70 |
| SAC | 282 915 | 150~160 | 85~90 | 0.70~0.75 |
| SAC3Q | 234 956 | 160~165 | 80~87 | 0.75~0.78 |
| SAC-HDM | 217 925 | 163~170 | 80~85 | 0.75~0.80 |
| SAC3Q-HDM | 212 206 | 170~177 | 73~80 | 0.80~0.85 |
Table 3
Testing results
| 算法 | 环境I | 环境II | 环境III | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 100次随机 | 10次固定 | 100次随机 | 10次固定 | 100次随机 | 10次固定 | |||||||
| AR | SR/% | AL | AT | AR | SR/% | AL | AT | AR | SR/% | AL | AT | |
| DDPG | 122.9 | 85 | 14.45 | 39.41 | 157.7 | 91 | 17.71 | 37.31 | 75.6 | 74 | 14.97 | 41.80 |
| TD3 | 153.4 | 91 | 11.82 | 22.93 | 159.1 | 92 | 13.22 | 34.36 | 129.8 | 82 | 14.13 | 38.23 |
| SAC | 170.9 | 92 | 11.68 | 22.03 | 163.2 | 93 | 13.10 | 27.95 | 135.5 | 83 | 14.77 | 37.15 |
| SAC3Q | 173.0 | 94 | 11.38 | 21.18 | 177.1 | 95 | 11.97 | 26.58 | 147.3 | 88 | 13.68 | 28.44 |
| SAC-HDM | 174.7 | 95 | 11.46 | 21.34 | 176.5 | 95 | 12.68 | 27.32 | 141.6 | 86 | 13.74 | 28.62 |
| SAC3Q-HDM | 176.9 | 96 | 11.00 | 17.83 | 181.2 | 97 | 11.77 | 25.21 | 156.1 | 90 | 13.39 | 27.18 |

Fig. 11
Environment I path map


Fig. 12
Environment II path map


Fig. 13
Environment III path map

| [1] | 崔炜, 朱发证. 机器人导航的路径规划算法研究综述[J]. 计算机工程与应用, 2023, 59(19): 10-20. |
| Cui Wei, Zhu Fazheng. Review of Path Planning Algorithms for Robot Navigation[J]. Computer Engineering and Applications, 2023, 59(19): 10-20. | |
| [2] | 姚得鑫, 伞红军, 王雅如, 等. 移动机器人路径规划中A*算法的改进研究[J]. 系统仿真学报, 2024, 36(11): 2684-2698. |
| Yao Dexin, Hongjun San, Wang Yaru, et al. Improvement of A* Algorithm in Path Planning of Mobile Robot[J]. Journal of System Simulation, 2024, 36(11): 2684-2698. | |
| [3] | 巩慧, 倪翠, 王朋, 等. 基于Dijkstra算法的平滑路径规划方法[J]. 北京航空航天大学学报, 2024, 50(2): 535-541. |
| Gong Hui, Ni Cui, Wang Peng, et al. A Smooth Path Planning Method Based on Dijkstra Algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(2): 535-541. | |
| [4] | 徐强, 徐坚磊, 胡燕海, 等. 基于改进模拟退火遗传算法的机械臂轨迹优化[J]. 系统仿真学报, 2025, 37(2): 404-412. |
| Xu Qiang, Xu Jianlei, Hu Yanhai, et al. Trajectory Optimization of Robotic Arm Based on Improved Simulated Annealing Genetic Algorithm[J]. Journal of System Simulation, 2025, 37(2): 404-412. | |
| [5] | 鲍惠芳, 方杰, 张进思, 等. 基于改进蚁群算法的低碳冷链配送路径优化[J]. 系统仿真学报, 2024, 36(1): 183-194. |
| Bao Huifang, Fang Jie, Zhang Jinsi, et al. Optimization on Cold Chain Distribution Routes Considering Carbon Emissions Based on Improved Ant Colony Algorithm[J]. Journal of System Simulation, 2024, 36(1): 183-194. | |
| [6] | Gao Kaizhou, Gao Minglong, Zhou Mengchu, et al. Artificial Intelligence Algorithms in Unmanned Surface Vessel Task Assignment and Path Planning: A Survey[J]. Swarm and Evolutionary Computation, 2024, 86: 101505. |
| [7] | Wu Jingda, Huang Chao, Huang Hailong, et al. Recent Advances in Reinforcement Learning-based Autonomous Driving Behavior Planning: A Survey[J]. Transportation Research Part C: Emerging Technologies, 2024, 164: 104654. |
| [8] | Quinones-Ramirez Miguel, Rios-Martinez Jorge, Uc-Cetina Victor. Robot Path Planning Using Deep Reinforcement Learning[EB/OL]. (2023-03-06) [2025-03-18]. . |
| [9] | Zhou Qian, Lian Yang, Wu Jiayang, et al. An Optimized Q-learning Algorithm for Mobile Robot Local Path Planning[J]. Knowledge-Based Systems, 2024, 286: 111400. |
| [10] | Demelash Abiye Deguale, Yu Lingli, Melikamu Liyih Sinishaw, et al. Enhancing Stability and Performance in Mobile Robot Path Planning with PMR-Dueling DQN Algorithm[J]. Sensors, 2024, 24(5): 1523. |
| [11] | Lillicrap Timothy P, Hunt Jonathan J, Pritzel Alexander, et al. Continuous Control with Deep Reinforcement Learning[EB/OL]. (2019-07-05) [2025-03-18]. . |
| [12] | Fujimoto Scott, Hoof Herke, Meger David. Addressing Function Approximation Error in Actor-Critic Methods[C]//Proceedings of the 35th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2018: 1587-1596. |
| [13] | Zhang Yinmin, Liu Jie, Li Chuming, et al. A Perspective of Q-value Estimation on Offline-to-online Reinforcement Learning[C]//Proceedings of the Thirty-eighth AAAI Conference on Artificial Intelligence and Thirty-sixth Conference on Innovative Applications of Artificial Intelligence and Fourteenth Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2024: 16908-16916. |
| [14] | Ly Adrian, Dazeley Richard, Vamplew Peter, et al. Elastic Step DQN: A Novel Multi-step Algorithm to Alleviate Overestimation in Deep Q-Networks[J]. Neurocomputing, 2024, 576: 127170. |
| [15] | Wang Zhengjun, Gao Weifeng, Li Genghui, et al. Path Planning for Unmanned Aerial Vehicle via Off-policy Reinforcement Learning with Enhanced Exploration[J]. IEEE Transactions on Emerging Topics in Computational Intelligence, 2024, 8(3): 2625-2639. |
| [16] | Luo Xuqiong, Wang Qiyuan, Gong Hongfang, et al. UAV Path Planning Based on the Average TD3 Algorithm with Prioritized Experience Replay[J]. IEEE Access, 2024, 12: 38017-38029 |
| [17] | Cimurs Reinis, Il Hong Suh, Jin Han Lee. Goal-driven Autonomous Exploration Through Deep Reinforcement Learning[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 730-737. |
| [18] | Wang Jiaqi, Han Huiyan, Han Xie, et al. Reinforcement Learning Path Planning Method Incorporating Multi-step Hindsight Experience Replay for Lightweight Robots[J]. Displays, 2024, 84: 102796. |
| [19] | Khlif Nesrine, Nahla Khraief, Safya Belghith. Reinforcement Learning with Modified Exploration Strategy for Mobile Robot Path Planning[J]. Robotica, 2023, 41(9): 2688-2702. |
| [20] | Haarnoja Tuomas, Zhou Aurick, Hartikainen Kristian, et al. Soft Actor-Critic Algorithms and Applications[EB/OL]. (2019-01-29) [2025-03-18]. . |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [3] | Li Guozheng, Wang Rui, Fan Shichao, Cai Xintong, Zhai Xinyue. Review on Optimization of Simulation Modeling Strategies for Spacecraft Orbit Avoidance [J]. Journal of System Simulation, 2026, 38(4): 855-868. |
| [4] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [5] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [6] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [7] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [8] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [9] | Zheng Wei, Tang Jiahao, Xiong Xiaoping, Fan Xin. Intelligent Decision-making Method in Imbalanced Air Combat Based on Asymmetric Self-play [J]. Journal of System Simulation, 2026, 38(2): 433-446. |
| [10] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [11] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [12] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [13] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [14] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [15] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
