

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (2): 360-371.doi: 10.16182/j.issn1004731x.joss.25-0595
• Machine Learning Algorithms • Previous Articles Next Articles
Yang Can, Chen Kai, Zhu Feng
Received:2025-06-24
Revised:2025-09-07
Online:2026-02-18
Published:2026-02-11
Contact:
Zhu Feng
CLC Number:
Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition[J]. Journal of System Simulation, 2026, 38(2): 360-371.
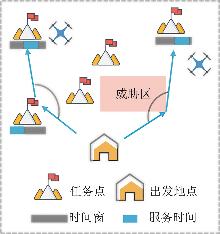
Fig. 1
UAV orienteering problem under multi-constraint condition
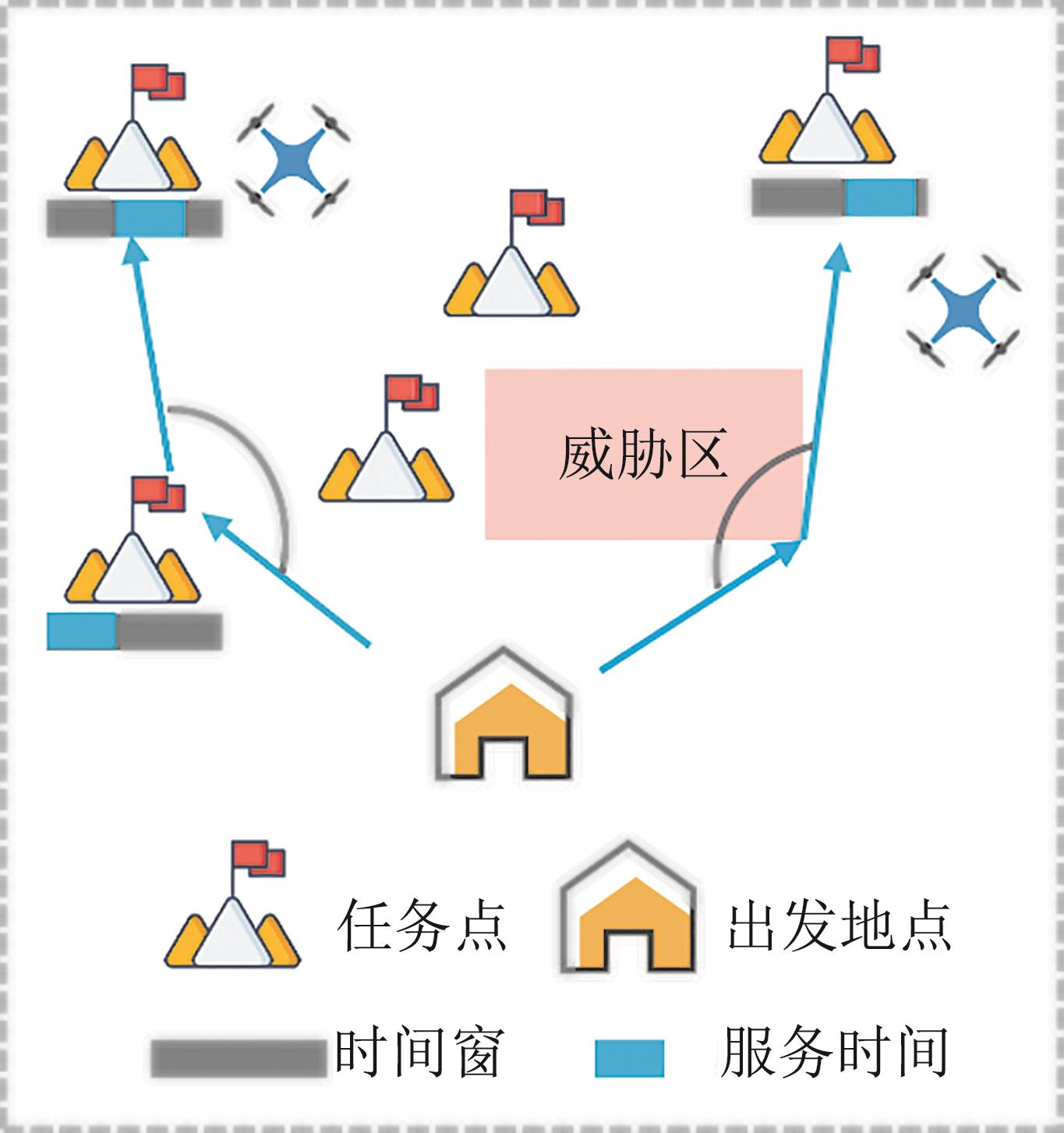

Fig. 2
Attention mechanism-based efficient RL framework
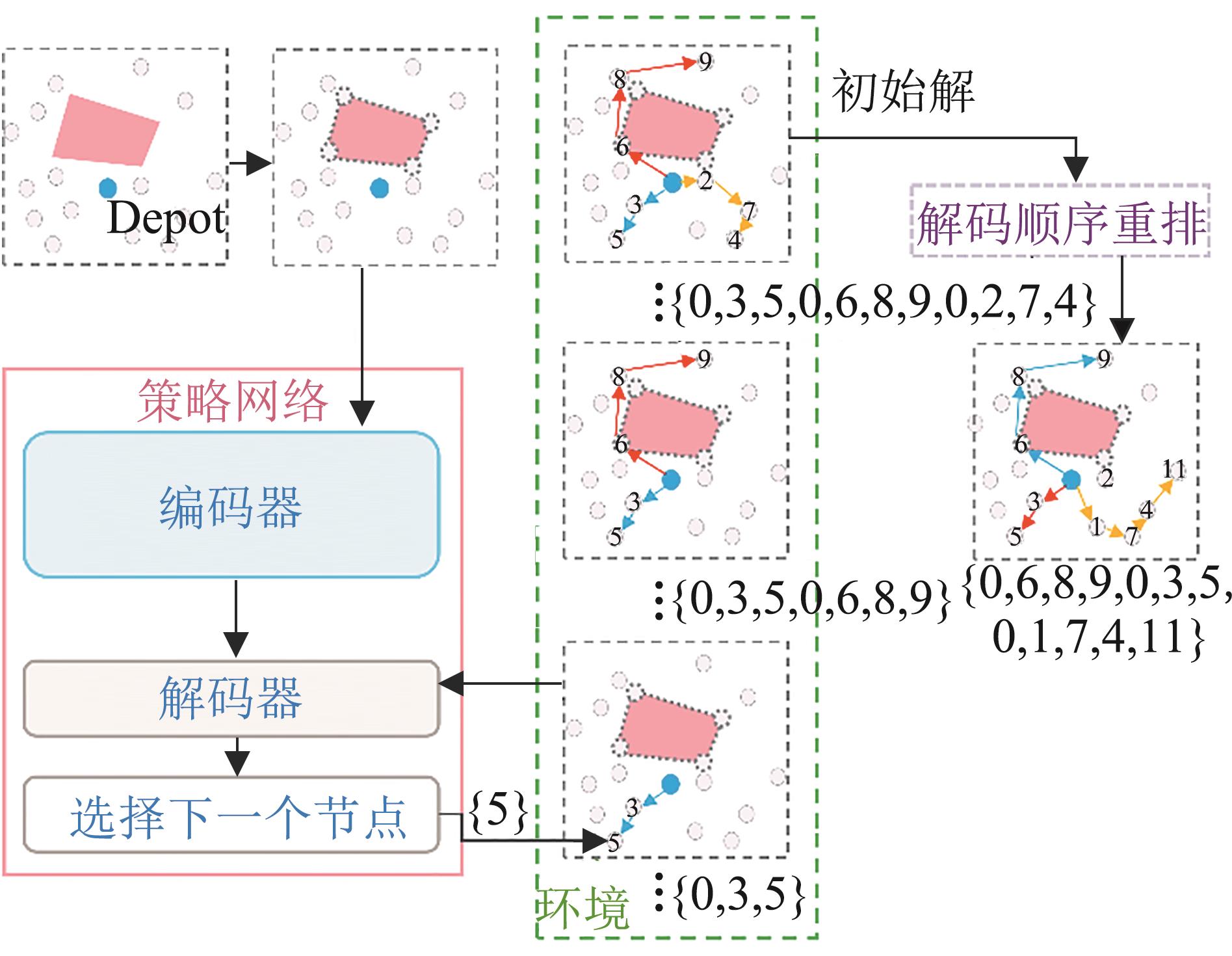

Fig. 3
MIFDAM
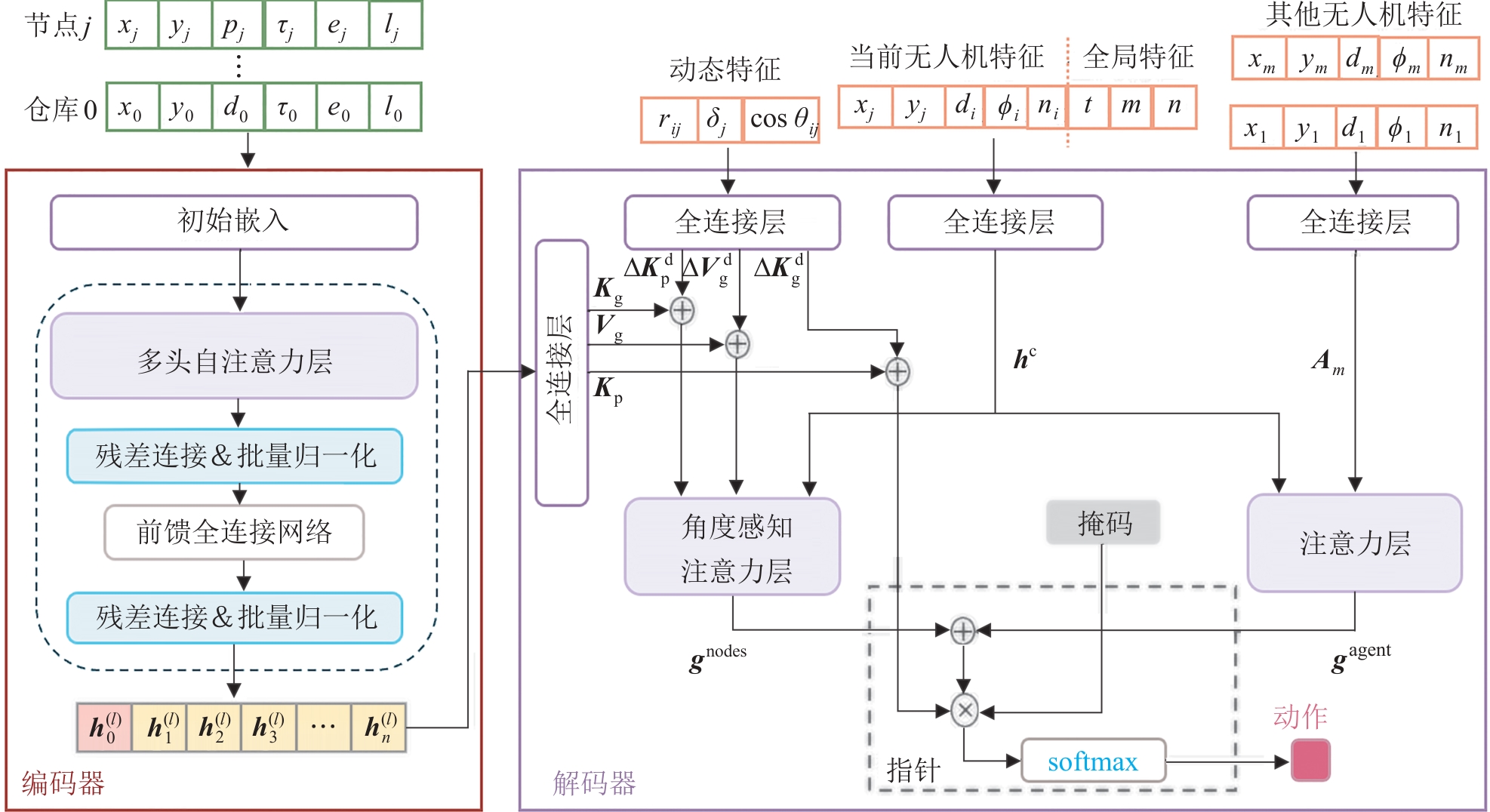
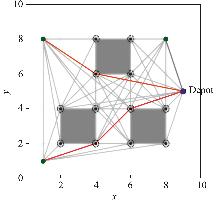
Fig. 4
Path planning and threat zone avoidance based on visibility graph method
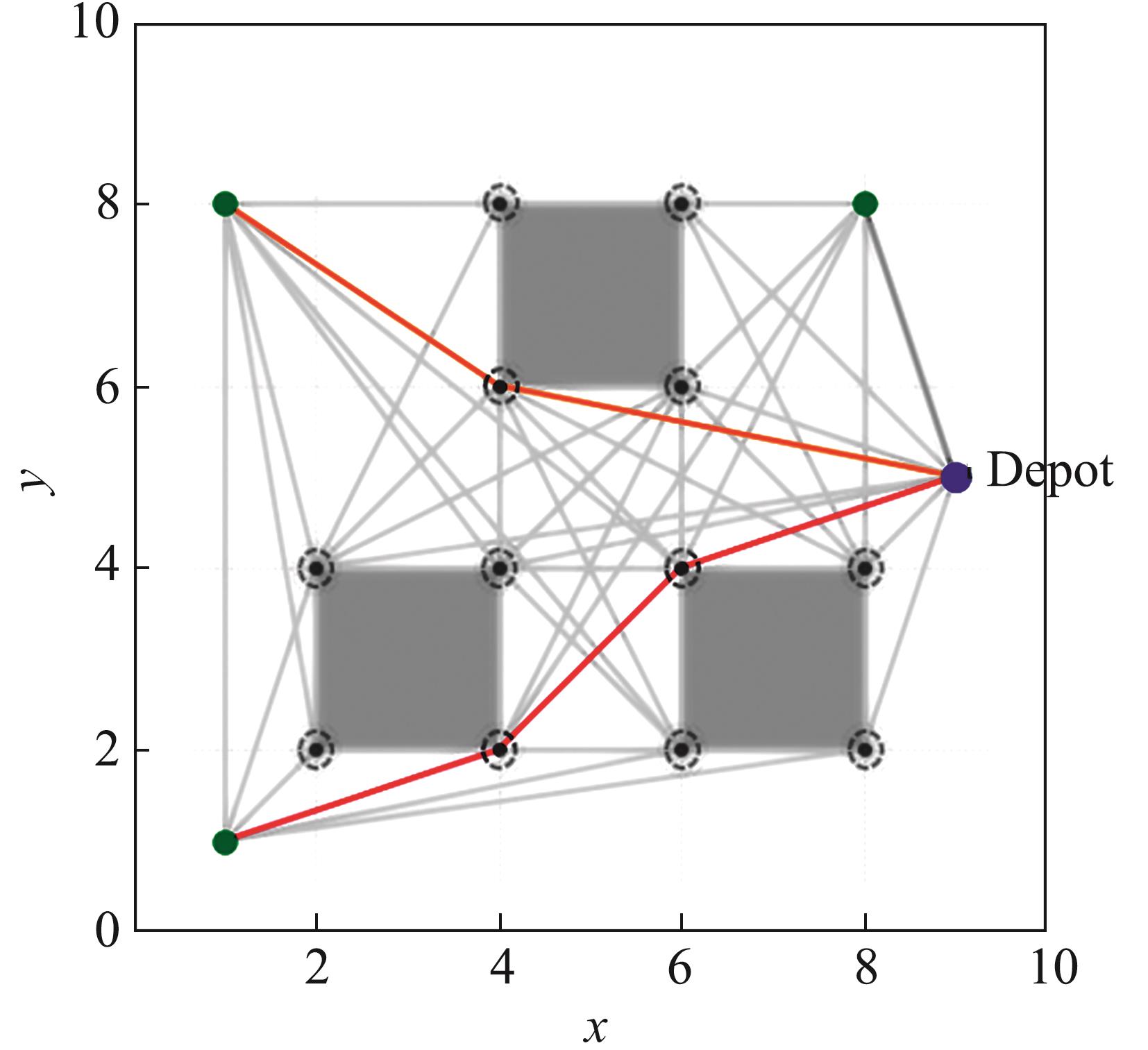

Fig. 5
Illustration of decoding sequence reordering
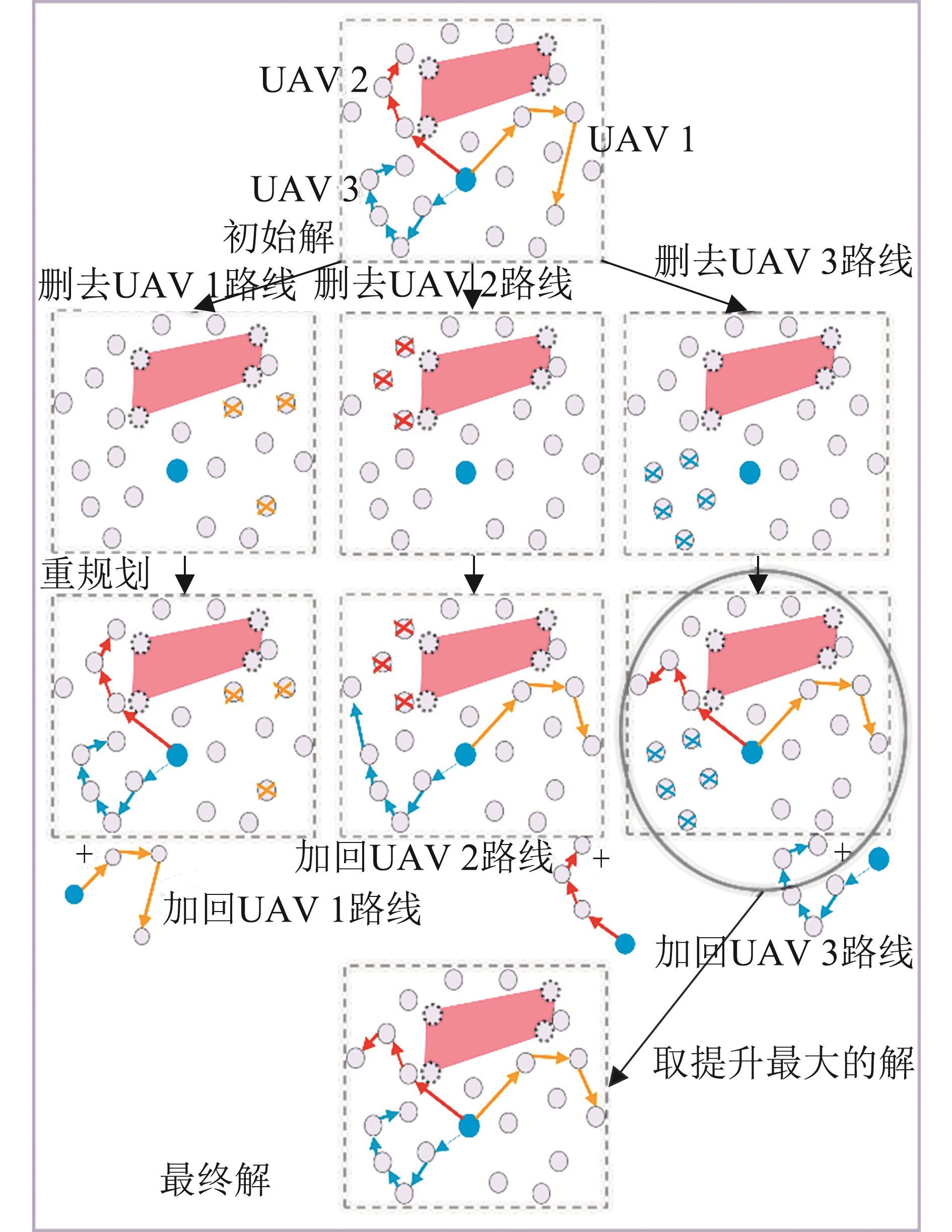
Table 1
Hyperparameter settings for model training
| 参数名称 | 取值 |
|---|---|
| 注意力层数 | 3 |
| 特征维数 | 128 |
| 批大小 | 512 |
| 训练样本总数 | 1.28亿 |
| 每轮次样本数 | 128万 |
| 轮次 | 100 |
| 优化器 | Adam |
| 学习率 | 0.000 1 |
| 策略 | Sample |
Table 2
Comparison among different methods on multi-scenario UAV-TOP problems
| 场景 | 角度约束 | 威胁区个数 | MIFDAM模型 | AM模型 | OR-tools | PyVRP |
|---|---|---|---|---|---|---|
| 50-3 | 有 | 3 | 15.49 (<1 s) | 14.63 (<1 s) | 13.99 (10 s) | 不适用 |
| 有 | 4 | 14.76 (<1 s) | 13.80 (<1 s) | 13.65 (10 s) | 不适用 | |
| 有 | 5 | 14.17 (<1 s) | 13.33 (<1 s) | 12.21 (10 s) | 不适用 | |
| 无 | 3 | 20.04 (<1 s) | 19.48 (<1 s) | 20.01 (1 s) | 18.89 (1 s) | |
| 无 | 4 | 19.51 (<1 s) | 18.79(<1 s) | 19.92 (1 s) | 18.73 (1 s) | |
| 无 | 5 | 18.96 (<1 s) | 18.03 (<1 s) | 19.86 (1 s) | 18.50 (1 s) | |
| 100-5 | 有 | 3 | 32.37 (<1 s) | 30.17 (<1 s) | 29.13 (200 s) | 不适用 |
| 有 | 4 | 31.20 (<1 s) | 28.90 (<1 s) | 29.08 (200 s) | 不适用 | |
| 有 | 5 | 30.01 (<1 s) | 28.62 (<1 s) | 28.36 (200 s) | 不适用 | |
| 无 | 3 | 39.75 (<1 s) | 38.41 (<1 s) | 38.57 (1 s) | 33.16 (1 s) | |
| 无 | 4 | 38.95 (<1 s) | 37.76 (<1 s) | 38.54 (1 s) | 31.10 (1 s) | |
| 无 | 5 | 38.27 (<1 s) | 37.52 (<1 s) | 38.48 (1 s) | 31.09 (1 s) |
Table 3
Performance comparison before and after decoding sequence reordering
| 序号 | MIFDAM | 解码顺序重排后 |
|---|---|---|
| 50-3 | 15.49 | 15.53 |
| 50-4 | 18.26 | 18.39 |
| 50-5 | 20.23 | 20.65 |
| 100-5 | 32.37 | 32.88 |
| 100-6 | 35.98 | 36.43 |
| 100-7 | 38.94 | 39.98 |

Fig. 6
Path planning results for 50-3 scenario with varying numbers of threat zones
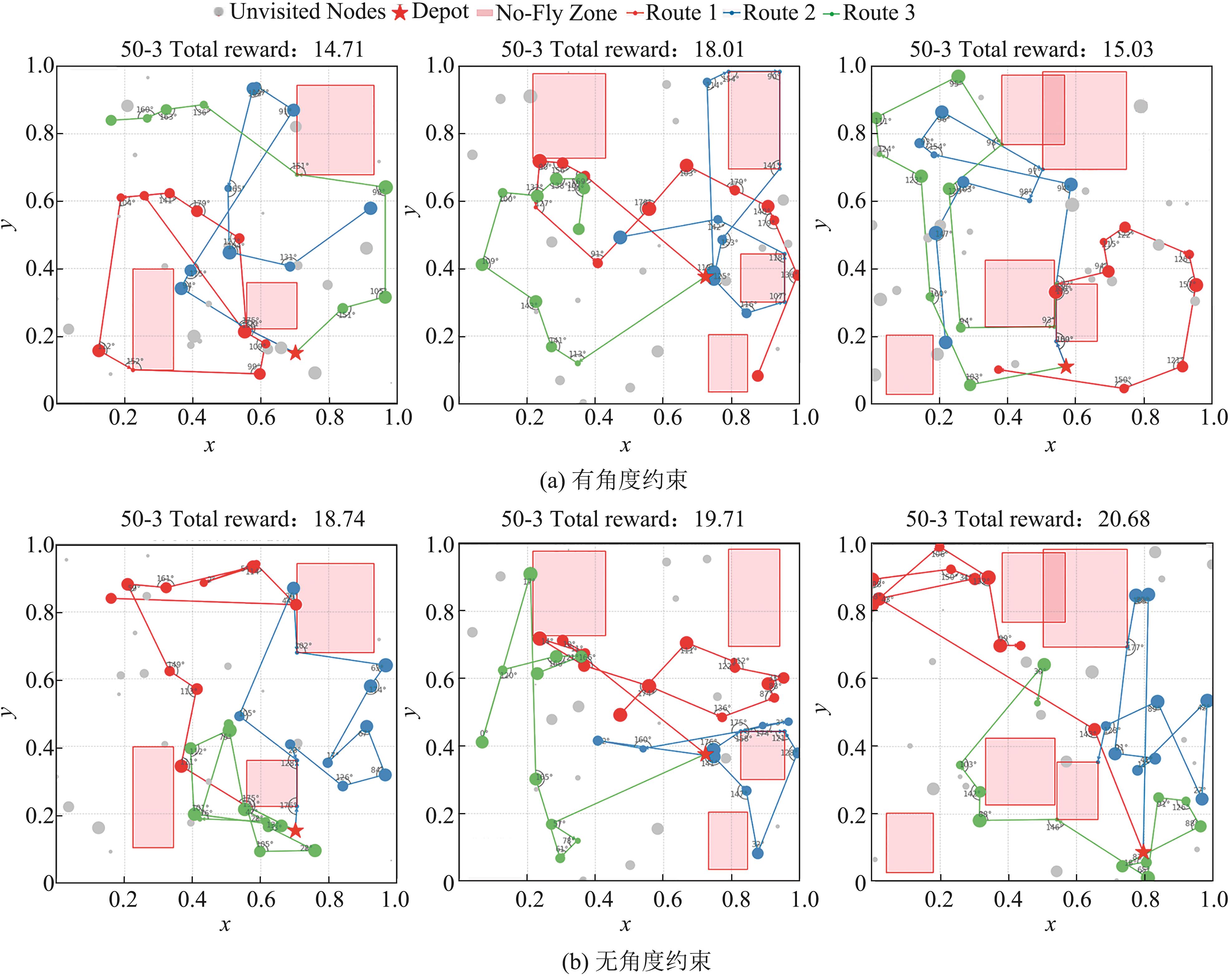

Fig. 7
Path planning results for 100-5 scenario with varying numbers of threat zones
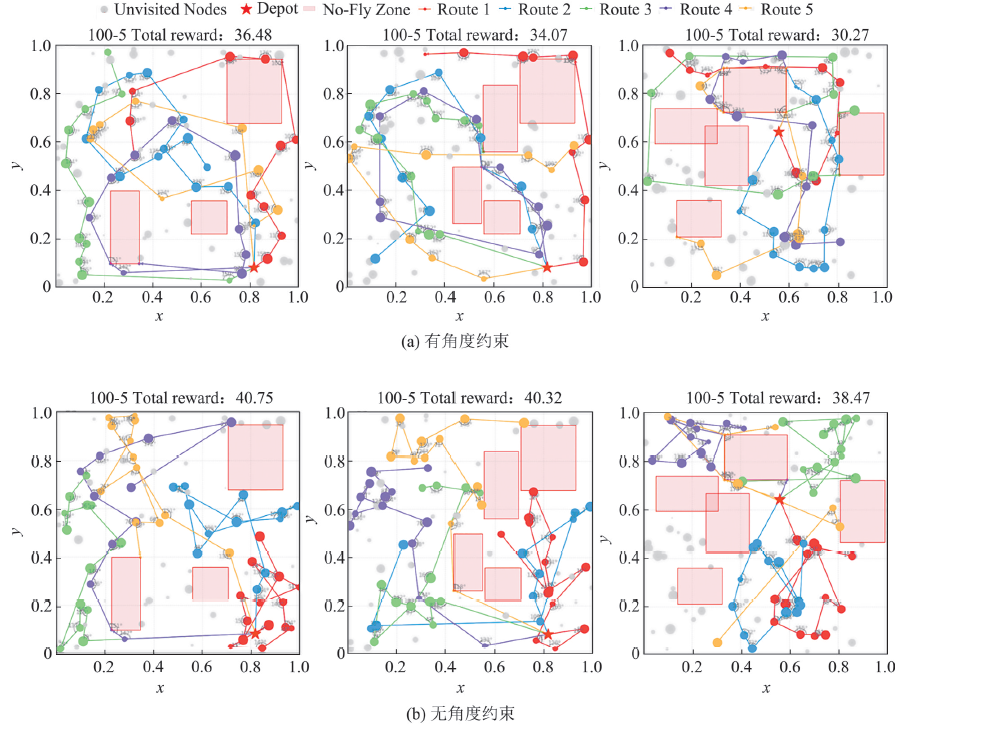
Fig. 8
Training time per epoch for different threat zone handling methods
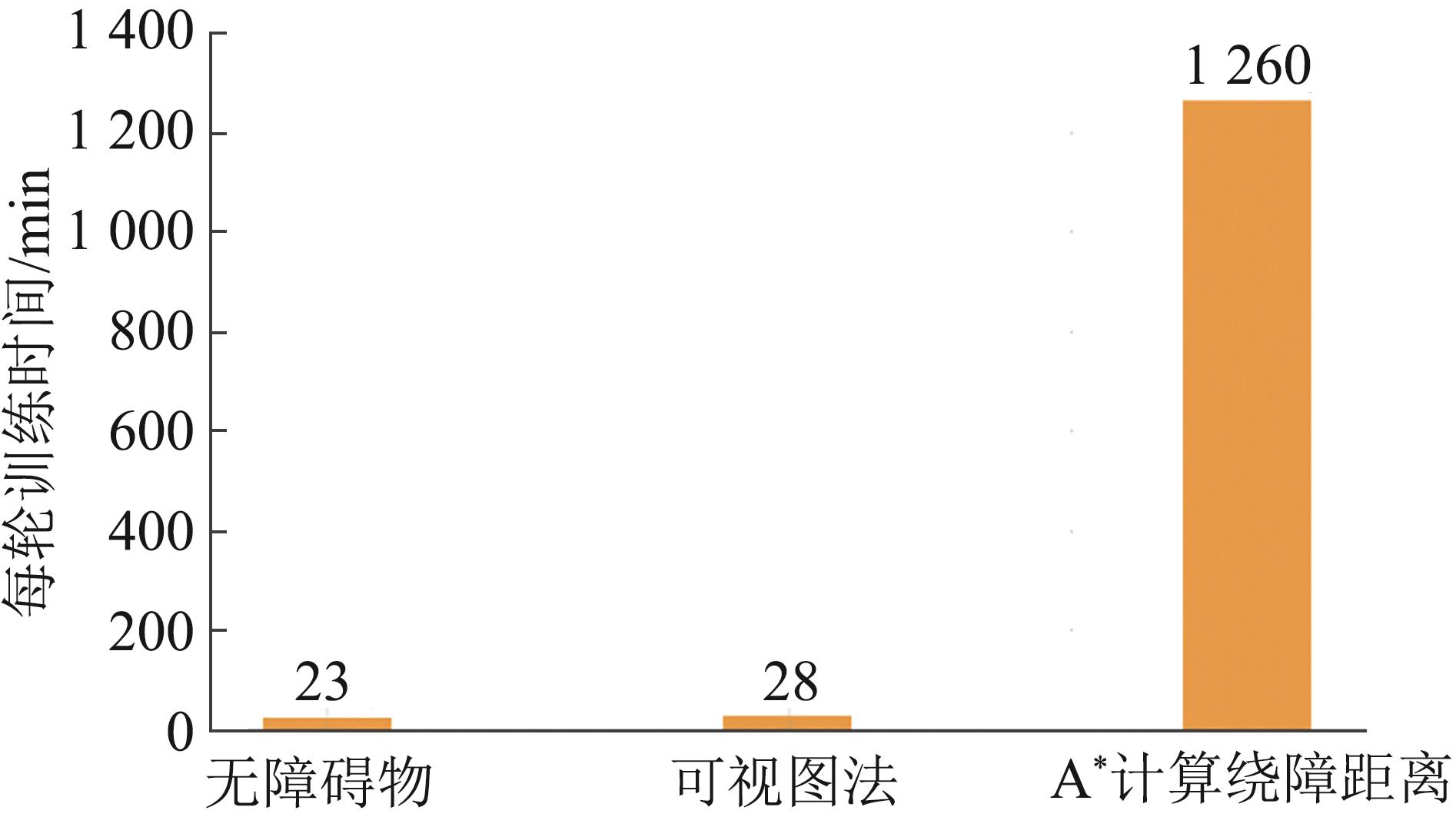
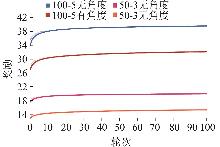
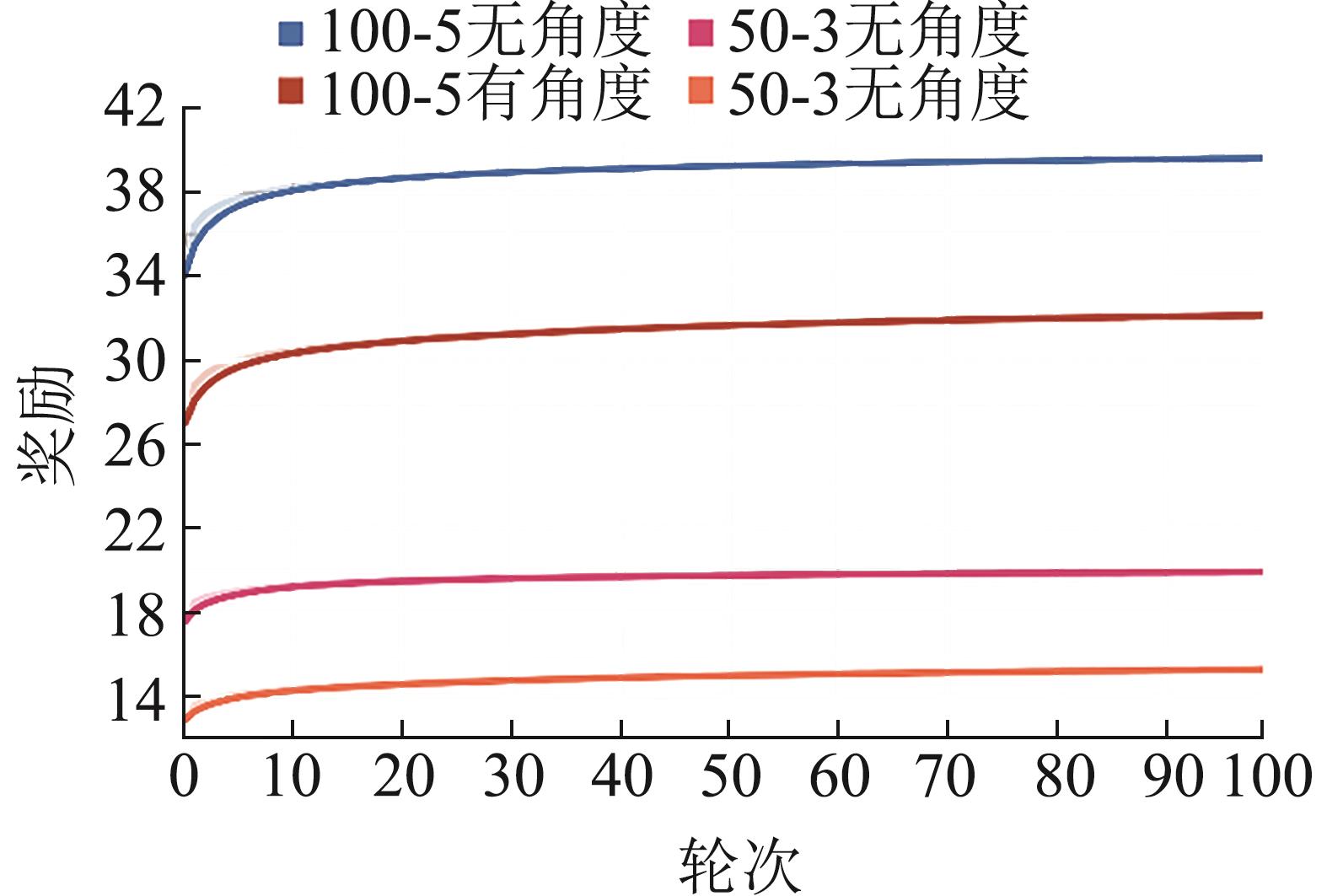
Fig. 9
Training convergence curves across different scenarios
| [1] | Tordesillas J, How J P. PANTHER: Perception-aware Trajectory Planner in Dynamic Environments[J]. IEEE Access, 2022, 10: 22662-22677. |
| [2] | 宁聪, 范菁, 孙书魁. 多无人机协同规划研究综述[J]. 计算机工程与应用, 2025, 61(1): 42-58. |
| Ning Cong, Fan Jing, Sun Shukui. Review of Multi-UAV Collaborative Planning Research[J]. Computer Engineering and Applications, 2025, 61(1): 42-58. | |
| [3] | Reyes-Rubiano Lorena S, Ospina-Trujillo Carlos F, Faulin Javier, et al. The Team Orienteering Problem with Stochastic Service Times and Driving-range Limitations: A Simheuristic Approach[C]//2018 Winter Simulation Conference (WSC). Piscataway: IEEE, 2018: 3025-3035. |
| [4] | Chung K T, Lee C K M, Tsang Y P. Neural Combinatorial Optimization with Reinforcement Learning in Industrial Engineering: A Survey[J]. Artificial Intelligence Review, 2025, 58(5): 130. |
| [5] | Jiang Mingyang, Li Yueyuan, Zhang Songan, et al. HOPE: A Reinforcement Learning-based Hybrid Policy Path Planner for Diverse Parking Scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(5): 6130-6141. |
| [6] | Kool W, Van Hoof H, Welling M. Attention, Learn to Solve Routing Problems![C]//International Conference on Learning Representations. New Orleans, LA, USA: OpenReview.net, 2019: 1-14. |
| [7] | Braekers Kris, Ramaekers Katrien, Van Nieuwenhuyse Inneke. The Vehicle Routing Problem: State of the Art Classification and Review[J]. Computers & Industrial Engineering, 2016, 99: 300-313. |
| [8] | Cai Junchuang, Zhang Xinzhi, Lin Qiuzhen, et al. Deep Reinforcement Learning for Solving the Vehicle Routing Problem in Practical Logistics[C]//2024 IEEE Congress on Evolutionary Computation (CEC). Piscataway: IEEE, 2024: 1-8. |
| [9] | Rajwar Kanchan, Deep Kusum, Das Swagatam. An Exhaustive Review of the Metaheuristic Algorithms for Search and Optimization: Taxonomy, Applications, and Open Challenges[J]. Artificial Intelligence Review, 2023, 56(11): 13187-13257. |
| [10] | Berto Federico, Hua Chuanbo, Park Junyoung, et al. RL4CO: An Extensive Reinforcement Learning for Combinatorial Optimization Benchmark[EB/OL]. (2023-06-29) [2025-06-01]. . |
| [11] | Mazyavkina Nina, Sviridov Sergey, Ivanov Sergei, et al. Reinforcement Learning for Combinatorial Optimization: A Survey[J]. Computers & Operations Research, 2021, 134: 105400. |
| [12] | AlMahamid Fadi, Grolinger Katarina. Agile DQN: Adaptive Deep Recurrent Attention Reinforcement Learning for Autonomous UAV Obstacle Avoidance[J]. Scientific Reports, 2025, 15(1): 18043. |
| [13] | He Yong, Hou Ticheng, Wang Mingran. A New Method for Unmanned Aerial Vehicle Path Planning in Complex Environments[J]. Scientific Reports, 2024, 14(1): 9257. |
| [14] | Vansteenwegen Pieter, Souffriau Wouter, Van Oudheusden Dirk. The Orienteering Problem: A Survey[J]. European Journal of Operational Research, 2011, 209(1): 1-10. |
| [15] | Drakulic Darko, Michel Sofia, Mai Florian, et al. BQ-NCO: Bisimulation Quotienting for Efficient Neural Combinatorial Optimization[C]//Proceedings of the 37th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2023: 77416-77429. |
| [16] | Berto Federico, Hua Chuanbo, Luttmann Laurin, et al. PARCO: Learning Parallel Autoregressive Policies for Efficient Multi-agent Combinatorial Optimization[EB/OL]. (2024-09-05) [2025-06-01]. . |
| [17] | Vaswani A, Shazeer N, Parmar N, et al. Attention Is All You Need[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| [18] | 王扬, 陈智斌, 吴兆蕊, 等. 强化学习求解组合最优化问题的研究综述[J]. 计算机科学与探索, 2022, 16(2): 261-279. |
| Wang Yang, Chen Zhibin, Wu Zhaorui, et al. Review of Reinforcement Learning for Combinatorial Optimization Problem[J]. Journal of Frontiers of Computer Science & Technology, 2022, 16(2): 261-279. | |
| [19] | Bello Irwan, Pham Hieu, V Le Quoc, et al. Neural Combinatorial Optimization with Reinforcement Learning[EB/OL]. (2016-11-29) [2025-06-01]. . |
| [20] | Márcio da Silva Arantes, Jesimar da Silva Arantes, Claudio Fabiano Motta Toledo, et al. A Hybrid Multi-population Genetic Algorithm for UAV Path Planning[C]//Proceedings of the Genetic and Evolutionary Computation Conference 2016. New York: ACM, 2016: 853-860. |
| [21] | Bittner Jiří, Wonka Peter. Visibility in Computer Graphics[J]. Environment and Planning B: Planning and Design, 2003, 30(5): 729-755. |
| [22] | Zhao Jiuxia, Mao Minjia, Zhao Xi, et al. A Hybrid of Deep Reinforcement Learning and Local Search for the Vehicle Routing Problems[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7208-7218. |
| [23] | Vansteenwegen Pieter, Souffriau Wouter, Greet Vanden Berghe, et al. Iterated Local Search for the Team Orienteering Problem with Time Windows[J]. Computers & Operations Research, 2009, 36(12): 3281-3290. |
| [24] | Wouda N A, Lan L, Kool W. PyVRP: : A High-performance VRP Solver Package[J]. Informs Journal on Computing, 2024, 36(4): 943-955. |
| [25] | Nahavandi Saeid, Alizadehsani Roohallah, Nahavandi Darius, et al. A Comprehensive Review on Autonomous Navigation[J]. ACM Computing Surveys, 2025, 57(9): 234. |
| [26] | Li Sirui, Yan Zhongxia, Wu C. Learning to Delegate for Large-scale Vehicle Routing[C]//Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 26198-26211. |
| [1] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [2] | Li Guozheng, Wang Rui, Fan Shichao, Cai Xintong, Zhai Xinyue. Review on Optimization of Simulation Modeling Strategies for Spacecraft Orbit Avoidance [J]. Journal of System Simulation, 2026, 38(4): 855-868. |
| [3] | Chen Yanjun, Zhou Min, Zha Meng, Zhang Meizhou. Research and Analysis of Algorithm for Detecting Surface Defects on Automotive Wheel Hubs Based on CCL-YOLOv8 [J]. Journal of System Simulation, 2026, 38(3): 670-686. |
| [4] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [5] | Zheng Wei, Tang Jiahao, Xiong Xiaoping, Fan Xin. Intelligent Decision-making Method in Imbalanced Air Combat Based on Asymmetric Self-play [J]. Journal of System Simulation, 2026, 38(2): 433-446. |
| [6] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [7] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [8] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [9] | Jiang Yanji, Zhang Yingyang, Dong Hao, Zhang Xiaoguang, Wang Meihui. Lane Detection in Dark Light Based on Instance Association [J]. Journal of System Simulation, 2025, 37(9): 2188-2199. |
| [10] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [11] | Lu Bin, Yang Xuan, Yang Zhenyu, Gao Xiaotian. Adaptive Sampling and Ghost Multi-scale Fusion for Lightweight Weld Defect Detection [J]. Journal of System Simulation, 2025, 37(8): 1978-1990. |
| [12] | Liu Zilong, Zhang Lei. Detection of Small Apple Targets Based on Improved YOLOv5 in Natural Environments [J]. Journal of System Simulation, 2025, 37(8): 2124-2138. |
| [13] | Chen Zhen, Wu Zhuoyi, Zhang Lin. Research on Policy Representation in Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(7): 1753-1769. |
| [14] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [15] | Gu Xueqiang, Luo Junren, Zhou Yanzhong, Zhang Wanpeng. Survey on Large Language Agent Technologies for Intelligent Game Theoretic Decision-making [J]. Journal of System Simulation, 2025, 37(5): 1142-1157. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
