

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (12): 3075-3086.doi: 10.16182/j.issn1004731x.joss.24-0721
• Papers • Previous Articles Next Articles
Peng Yi1,2, Lei Yunkui1,2, Yang Qingqing1,2, Li Hui1,2, Wang Jianming1,2
Received:2024-07-04
Revised:2024-08-29
Online:2025-12-26
Published:2025-12-24
Contact:
Yang Qingqing
CLC Number:
Peng Yi, Lei Yunkui, Yang Qingqing, Li Hui, Wang Jianming. Improved PID Search Algorithm for UAV Path Planning in Mountainous Environments[J]. Journal of System Simulation, 2025, 37(12): 3075-3086.
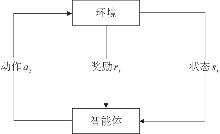
Fig. 1
Basic framework of reinforcement learning
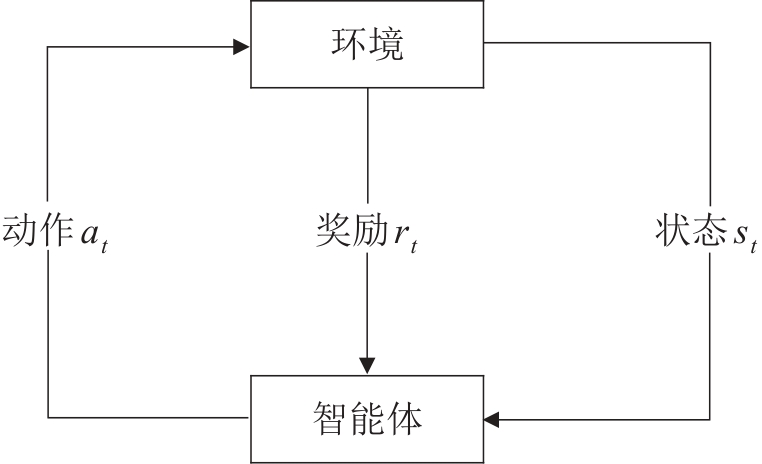

Fig. 2
Initial population distribution map and frequency distribution histogram
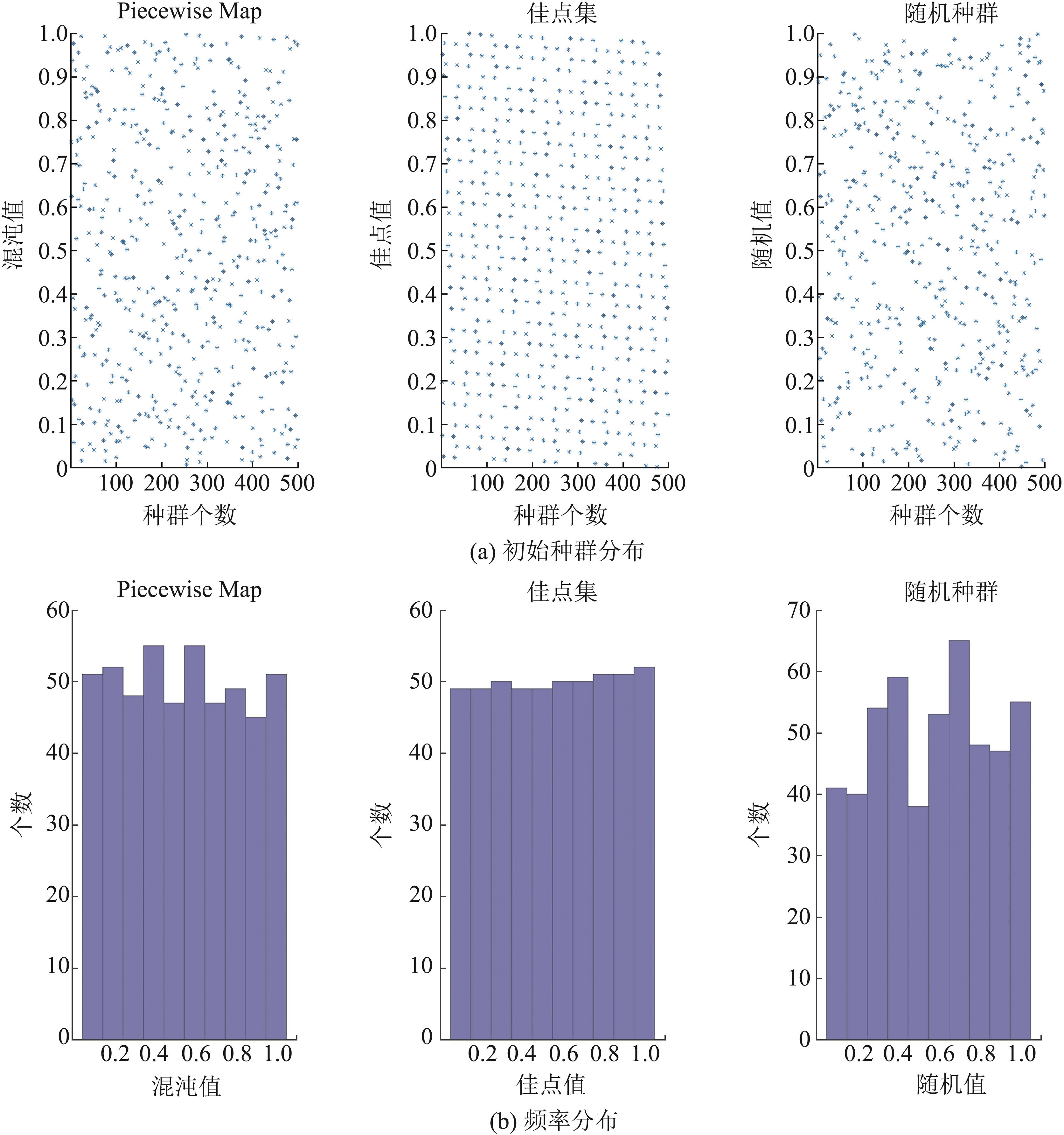
Table 1
Algorithm parameters
| 参数名称 | 参数值 |
|---|---|
| 最低飞行高度 | 100 |
| 最高飞行高度 | 200 |
| 最大转弯角 | |
| 最大爬升角 | |
| 起点 | (50, 50, 100) |
| 终点 | (800, 800, 100) |
| 初始学习率 | 0.9 |
| 最终学习率 | 0.1 |
| 探索率 | 0.9 |
| 折扣因子 | 0.9 |
| 比例系数 | 1 |
| 积分系数 | 0.05 |
| 微分系数 | 0.1 |
| 调整比例 | 5 |
Table 2
Fault area information in Scenario Ⅰ
| 障碍区 | 位置 | 威胁半径 |
|---|---|---|
| 1 | (300, 450, 150) | 50 |
| 2 | (350, 600, 150) | 70 |
| 3 | (450, 450, 150) | 85 |
| 4 | (550, 300, 150) | 75 |
Table 3
Algorithm result comparison in Scenario Ⅰ
| 指标 | IPSA | PSA | PSO | WOA |
|---|---|---|---|---|
| 最优值 | 377.63 | 386.57 | 385.08 | 409.11 |
| 平均值 | 385.08 | 399.09 | 409.19 | 420.86 |
| 平均路径/m | 1 198 | 1 203 | 1 209 | 1 242 |
| 标准差 | 6.18 | 9.24 | 10.80 | 17.30 |
| 平均收敛时间/s | 1.73 | 2.25 | 3.57 | 1.99 |
Fig. 3
Iteration curves of algorithms in Scenario Ⅰ
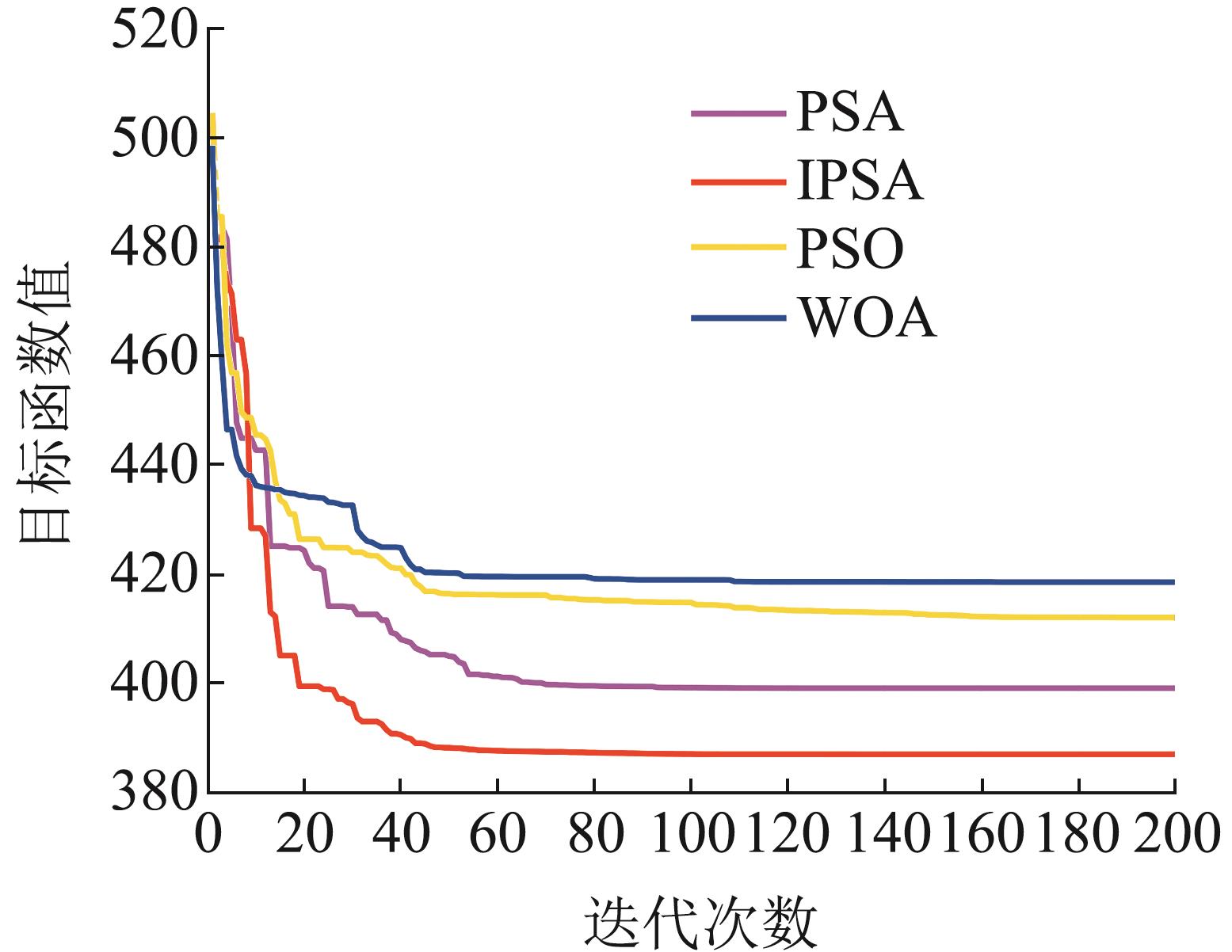
Fig. 4
Comparison of paths generated by each algorithm in Scenario Ⅰ
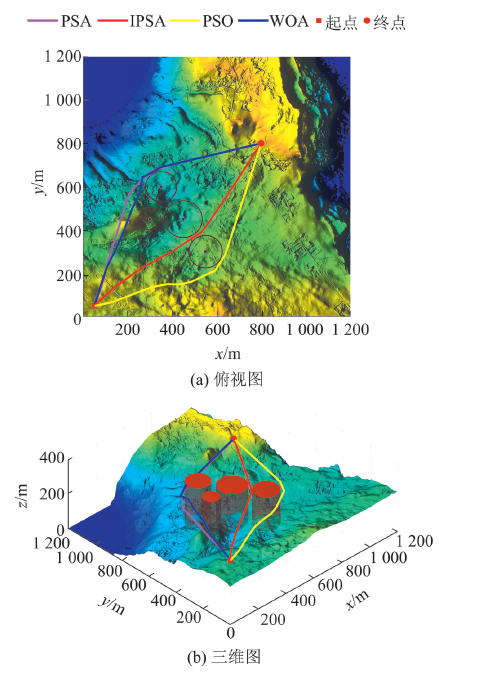
Table 4
Fault area information in Scenario Ⅱ
| 障碍区 | 位置 | 威胁半径 |
|---|---|---|
| 1 | (500, 100, 150) | 70 |
| 2 | (300, 500, 150) | 70 |
| 3 | (550, 300, 150) | 70 |
| 4 | (300, 250, 150) | 70 |
| 5 | (700, 650, 150) | 70 |
| 6 | (500, 700, 150) | 70 |
| 7 | (700, 400, 150) | 70 |
Table 5
Algorithm result comparison in Scenario Ⅱ
| 指标 | IPSA | PSA | PSO | WOA |
|---|---|---|---|---|
| 最优值 | 384.96 | 394.44 | 397.32 | 422.97 |
| 平均值 | 398.10 | 412.47 | 421.06 | 463.59 |
| 平均路径/m | 1 209 | 1 211 | 1 228 | 1 275 |
| 标准差 | 5.73 | 12.37 | 20.76 | 23.81 |
| 平均收敛时间/s | 1.82 | 2.50 | 4.38 | 2.34 |
Fig. 5
Iteration curves of algorithms in Scenario Ⅱ
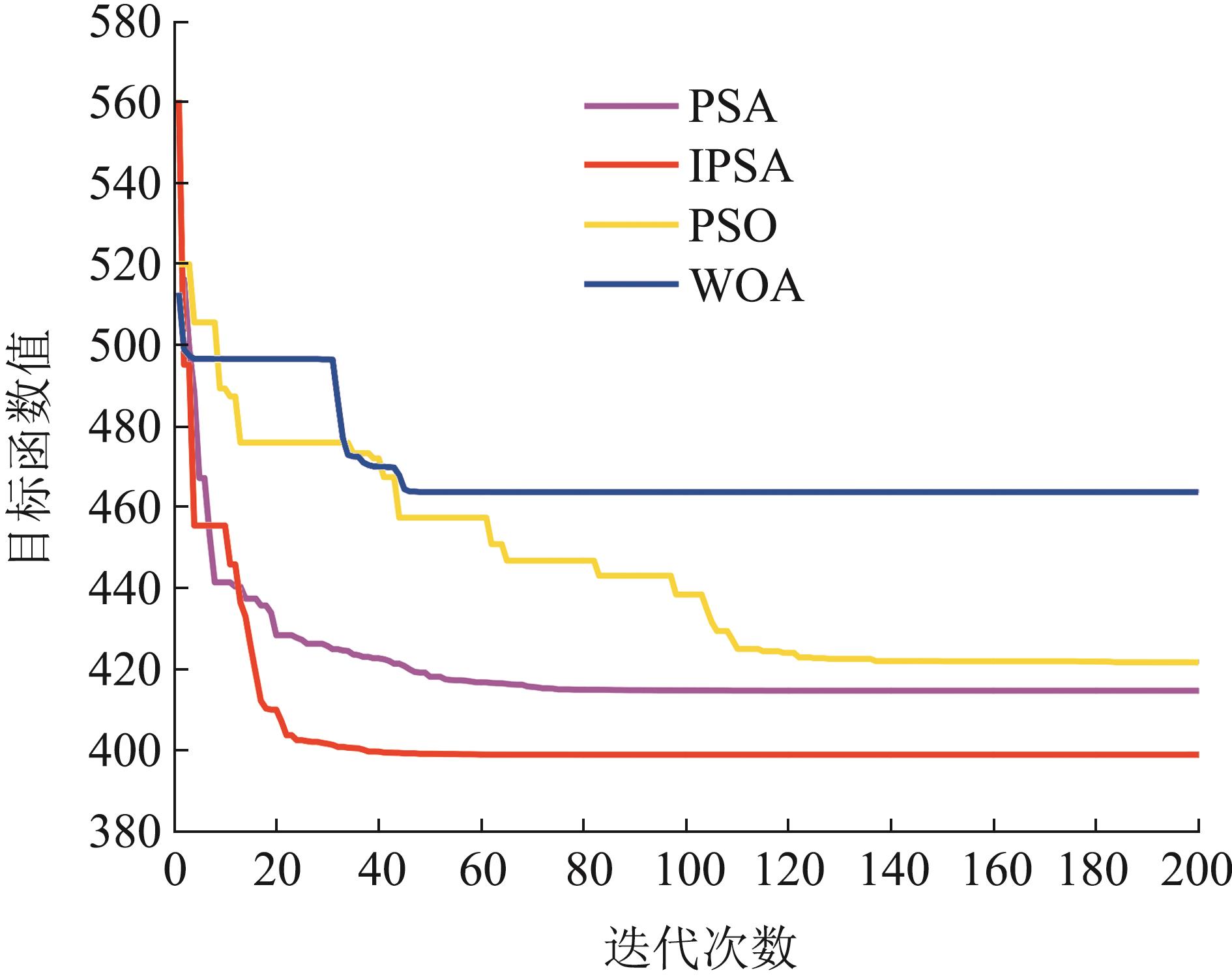
Fig. 6
Comparison of paths generated by each algorithm in Scenario Ⅱ
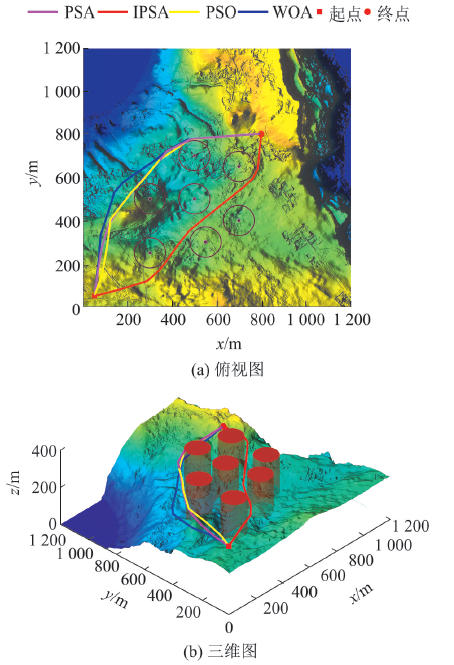
Table 6
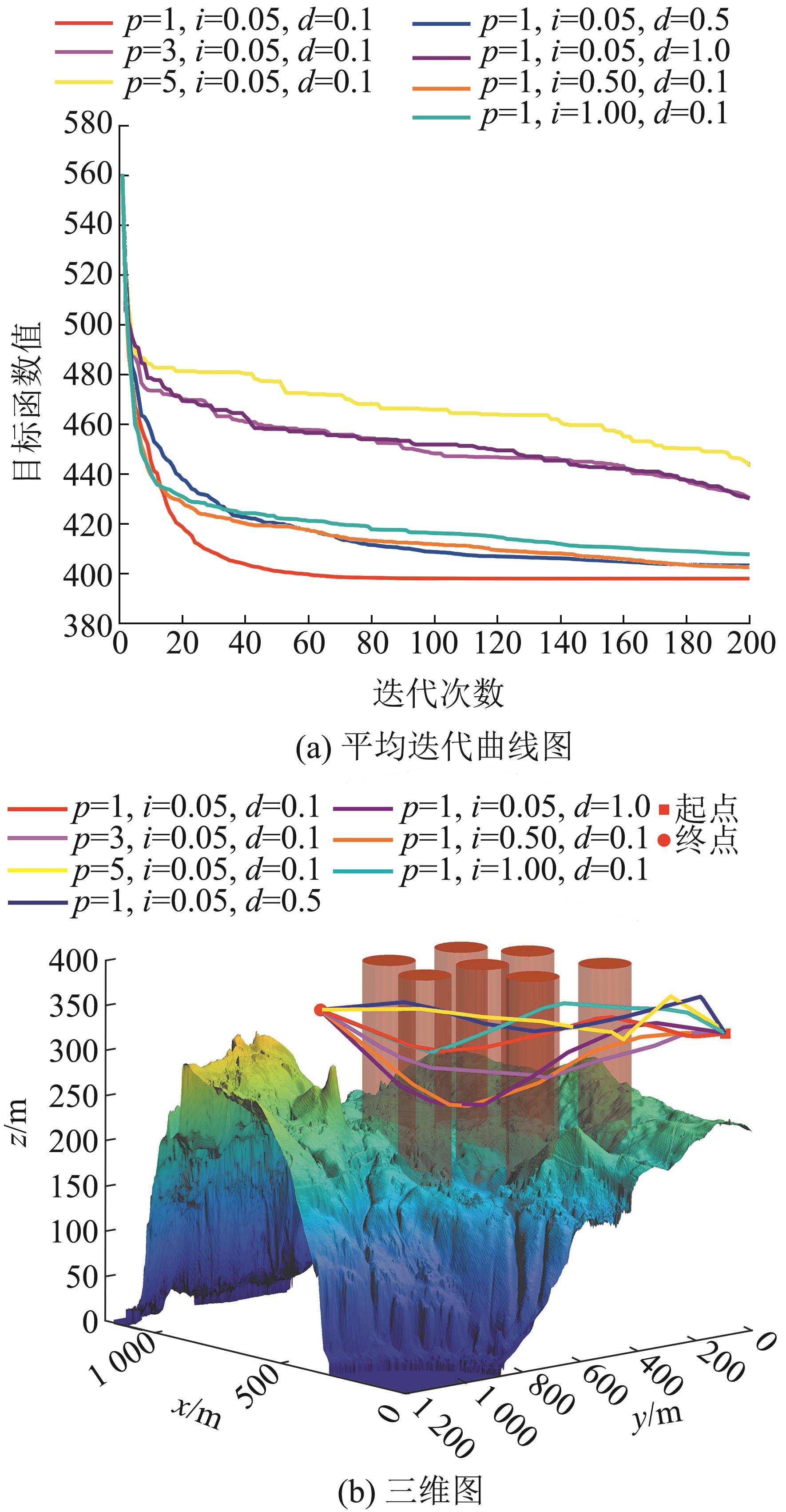
Influence of initial parameters on path planning
初始参数设置 (p, i, d) | 目标函数值 | 标准差 | 飞行距离/m | 高度变化/m | 角度变化/(°) |
|---|---|---|---|---|---|
| (1, 0.05, 0.1) | 398.10 | 5.73 | 1 207 | 122.11 | 116.72 |
| (3, 0.05, 0.1) | 430.34 | 10.12 | 1 233 | 234.19 | 183.88 |
| (5, 0.05, 0.1) | 443.37 | 16.28 | 1 233 | 279.41 | 226.52 |
| (1, 0.05, 0.5) | 403.34 | 10.12 | 1 213 | 186.35 | 118.08 |
| (1, 0.05, 1.0) | 430.26 | 16.92 | 1 227 | 241.18 | 190.23 |
| (1, 0.50, 0.1) | 402.63 | 9.45 | 1 212 | 150.52 | 119.92 |
| (1, 1.00, 0.1) | 407.83 | 16.75 | 1 216 | 190.82 | 118.74 |
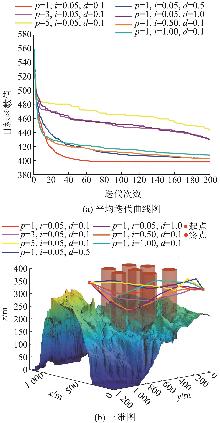
Fig. 7
Comparison of paths with different parameters in complex environments
| [1] | 黄冬梅, 徐琦, 孙锦中, 等. 基于改进混合粒子群算法和匹配理论的无人机电力巡检卸载策略[J]. 计算机应用研究, 2023, 40(7): 2111-2116. |
| Huang Dongmei, Xu Qi, Sun Jinzhong, et al. Power Inspection and Unloading Strategy of UAV Based on Improved Hybrid Particle Swarm Algorithm and Matching Theory[J]. Application Research of Computers, 2023, 40(7): 2111-2116. | |
| [2] | 苏立晨, 赵浩然, 郭通, 等. 基于动态分治的大规模多场站无人机应急救援优化方法[J]. 北京邮电大学学报, 2024, 47(1): 65-71. |
| Su Lichen, Zhao Haoran, Guo Tong, et al. Optimization Method for Large-scale Multi-site Unmanned Aerial Vehicle Emergency Rescue Based on Dynamic Divide-and-conquer Strategy[J]. Journal of Beijing University of Posts and Telecommunications, 2024, 47(1): 65-71. | |
| [3] | 刘金成, 王海明, 何亚琼, 等. 无人机技术在精准林业中的应用与挑战[J]. 农业工程学报, 2024, 40(5): 14-24. |
| Liu Jincheng, Wang Haiming, He Yaqiong, et al. Application and Challenges of UAV-based Technology in Precision Forestry[J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(5): 14-24. | |
| [4] | 吴坤, 谭劭昌. 基于改进鲸鱼优化算法的无人机航路规划[J]. 航空学报, 2020, 41(增2): 104-111. |
| Wu Kun, Tan Shaochang. Path Planning of UAVs Based on Improved Whale Optimization Algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 104-111. | |
| [5] | 隋东, 杨振宇, 丁松滨, 等. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| Sui Dong, Yang Zhenyu, Ding Songbin, et al. Three-dimensional Path Planning of UAV Based on EMSDBO Algorithm[J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. | |
| [6] | 黄鹤, 高永博, 茹锋, 等. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10): 1282-1291. |
| Huang He, Gao Yongbo, Ru Feng, et al. 3D Path Planning of UAV Based on Adaptive Slime Mould Algorithm Optimization[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291. | |
| [7] | 李高扬, 黎向锋, 赵康, 等. 全粒子推动野马优化算法的无人机三维路径规划[J]. 系统仿真学报, 2024, 36(3): 595-607. |
| Li Gaoyang, Li Xiangfeng, Zhao Kang, et al. Three-dimensional Path Planning of UAV Based on All Particles Driving Wild Horse Optimizer Algorithm[J]. Journal of System Simulation, 2024, 36(3): 595-607. | |
| [8] | 黄书召, 田军委, 乔路, 等. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2): 390-397. |
| Huang Shuzhao, Tian Junwei, Qiao Lu, et al. Unmanned Aerial Vehicle Path Planning Based on Improved Genetic Algorithm[J]. Journal of Computer Applications, 2021, 41(2): 390-397. | |
| [9] | Chen Yang, De Changpi, Xu Yue. Neighborhood Global Learning Based Flower Pollination Algorithm and Its Application to Unmanned Aerial Vehicle Path Planning[J]. Expert Systems with Applications, 2021, 170: 114505. |
| [10] | Yu Xiaobing, Li Chenliang, Zhou Jiafang. A Constrained Differential Evolution Algorithm to Solve UAV Path Planning in Disaster Scenarios[J]. Knowledge-Based Systems, 2020, 204: 106209. |
| [11] | Zhang Miaohan, Han Yuhang, Chen Shiyun, et al. A Multi-strategy Improved Differential Evolution Algorithm for UAV 3D Trajectory Planning in Complex Mountainous Environments[J]. Engineering Applications of Artificial Intelligence, 2023, 125: 106672. |
| [12] | Hu Gang, Zhong Jingyu, Wei Guo. SaCHBA_PDN: Modified Honey Badger Algorithm with Multi-strategy for UAV Path Planning[J]. Expert Systems with Applications, 2023, 223: 119941. |
| [13] | Yu Xiaobing, Luo Wenguan. Reinforcement Learning-based Multi-strategy Cuckoo Search Algorithm for 3D UAV Path Planning[J]. Expert Systems with Applications, 2023, 223: 119910. |
| [14] | Ali Hub, Xiong Gang, Muhammad Husnain Haider, et al. Feature Selection-based Decision Model for UAV Path Planning on Rough Terrains[J]. Expert Systems with Applications, 2023, 232: 120713. |
| [15] | Gao Yuansheng. PID-based Search Algorithm: A Novel Metaheuristic Algorithm Based on PID Algorithm[J]. Expert Systems with Applications, 2023, 232: 120886. |
| [16] | Fallahi Ali, Erfan Amani Bani, Seyed Taghi Akhavan Niaki. A Constrained Multi-item EOQ Inventory Model for Reusable Items: Reinforcement Learning-based Differential Evolution and Particle Swarm Optimization[J]. Expert Systems with Applications, 2022, 207: 118018. |
| [17] | Qu Chengzhi, Gai Wendong, Zhong Maiying, et al. A Novel Reinforcement Learning Based Grey Wolf Optimizer Algorithm for Unmanned Aerial Vehicles (UAVs) Path Planning[J]. Applied Soft Computing, 2020, 89(C): 106099. |
| [18] | 华罗庚, 王元. 数论在近似分析中的应用[M]. 北京: 科学出版社, 1978: 1-99. |
| [19] | 王子恺, 黄学雨, 朱东林, 等. 融合边界处理机制的学习型麻雀搜索算法[J]. 北京航空航天大学学报, 2024, 50(1): 286-298. |
| Wang Zikai, Huang Xueyu, Zhu Donglin, et al. Learning Sparrow Search Algorithm of Hybrids Boundary Processing Mechanisms[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(1): 286-298. | |
| [20] | 龙文, 伍铁斌, 唐明珠, 等. 基于透镜成像学习策略的灰狼优化算法[J]. 自动化学报, 2020, 46(10): 2148-2164. |
| Long Wen, Wu Tiebin, Tang Mingzhu, et al. Grey Wolf Optimizer Algorithm Based on Lens Imaging Learning Strategy[J]. Acta Automatica Sinica, 2020, 46(10): 2148-2164. | |
| [21] | He Yong, Wang Mingran. An Improved Chaos Sparrow Search Algorithm for UAV Path Planning[J]. Scientific Reports, 2024, 14(1): 366. |
| [22] | Manh Duong Phung, Quang Phuc Ha. Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization[J]. Applied Soft Computing, 2021, 107: 107376. |
| [23] | Mirjalili Seyedali, Lewis Andrew. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [7] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Qu Changhong, Wang Junjie, Wang Kun, Cui Qingyong, Chen Jiangyang, Wang Xinpeng. A Modeling and Simulation Method for Firepower Intelligent Decision-making of Directed Energy System Based on Joint DQN [J]. Journal of System Simulation, 2025, 37(5): 1256-1265. |
| [15] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
