

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (4): 1041-1050.doi: 10.16182/j.issn1004731x.joss.23-1574
• Papers • Previous Articles Next Articles
Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin
Received:2023-12-26
Revised:2024-03-02
Online:2025-04-17
Published:2025-04-16
Contact:
Shi Tielin
CLC Number:
Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm[J]. Journal of System Simulation, 2025, 37(4): 1041-1050.
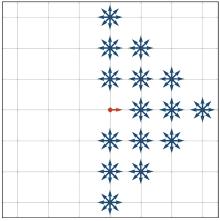
Fig. 1
Candidate successors of node(0,0,0)
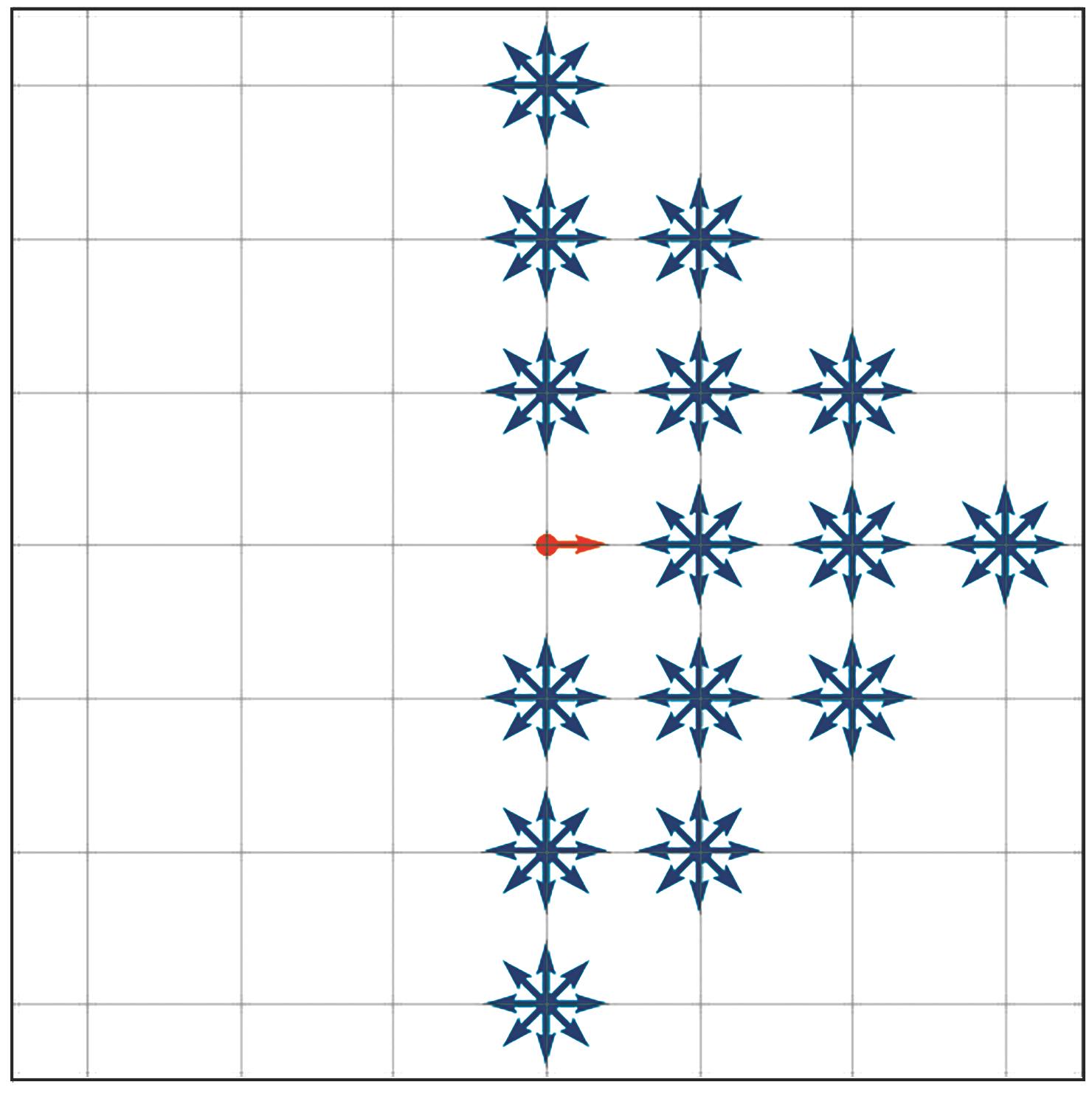
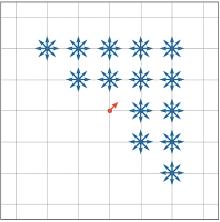
Fig. 2
Candidate successors of node(0,0,π/4)
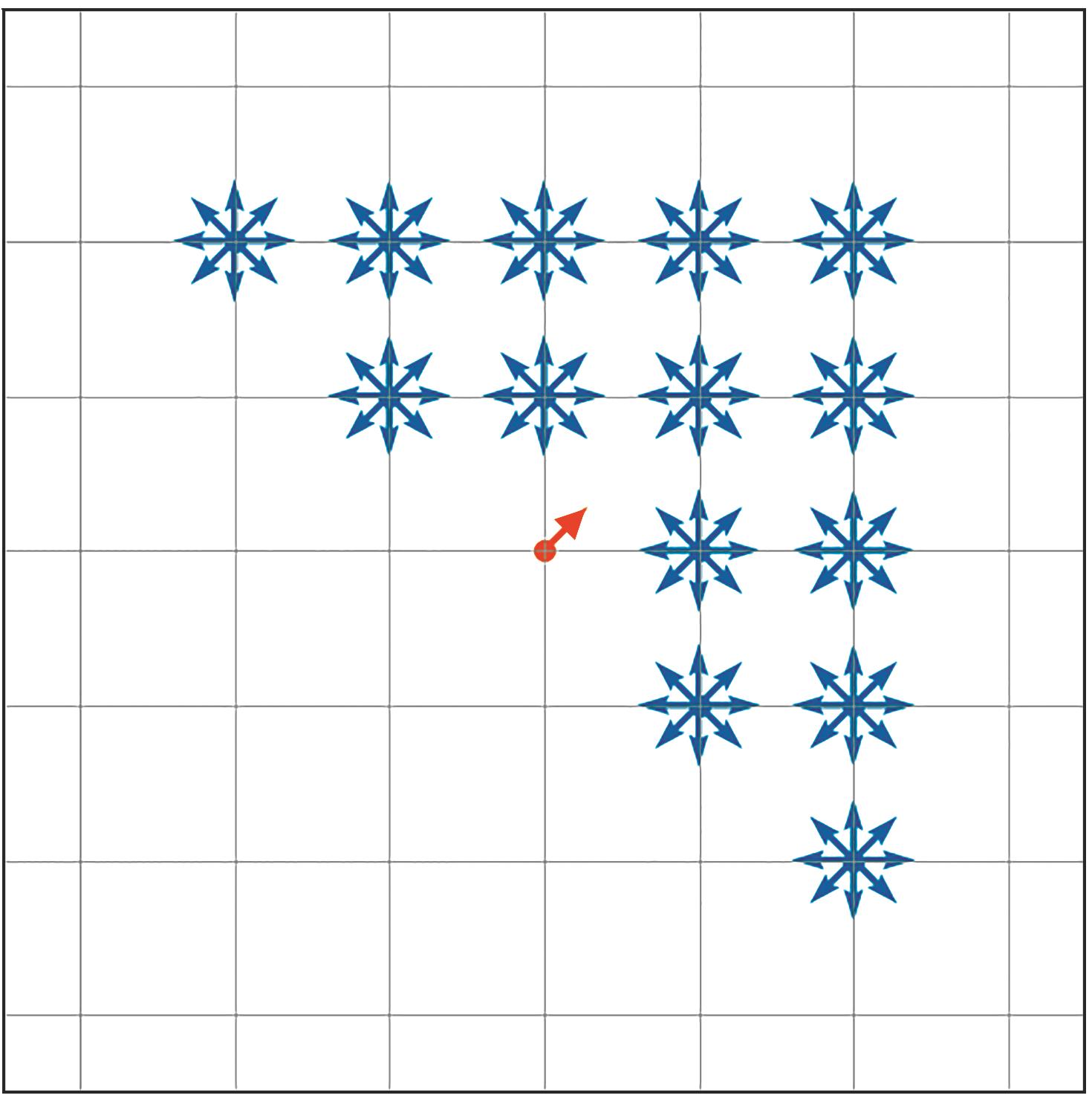
Fig. 3
Search step set of node(0,0,0)
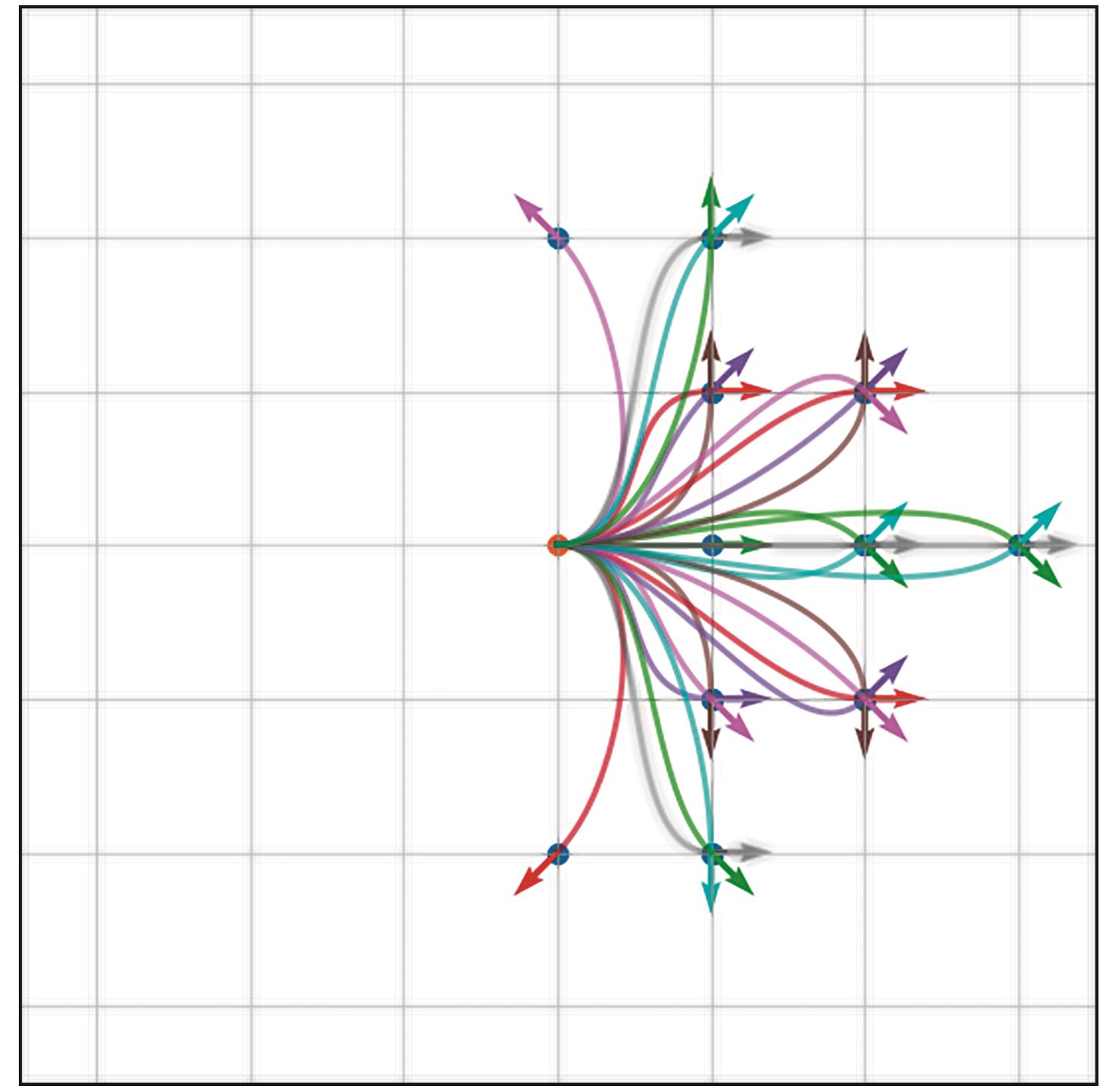
Fig. 4
Search step set of node(0,0,π/4)
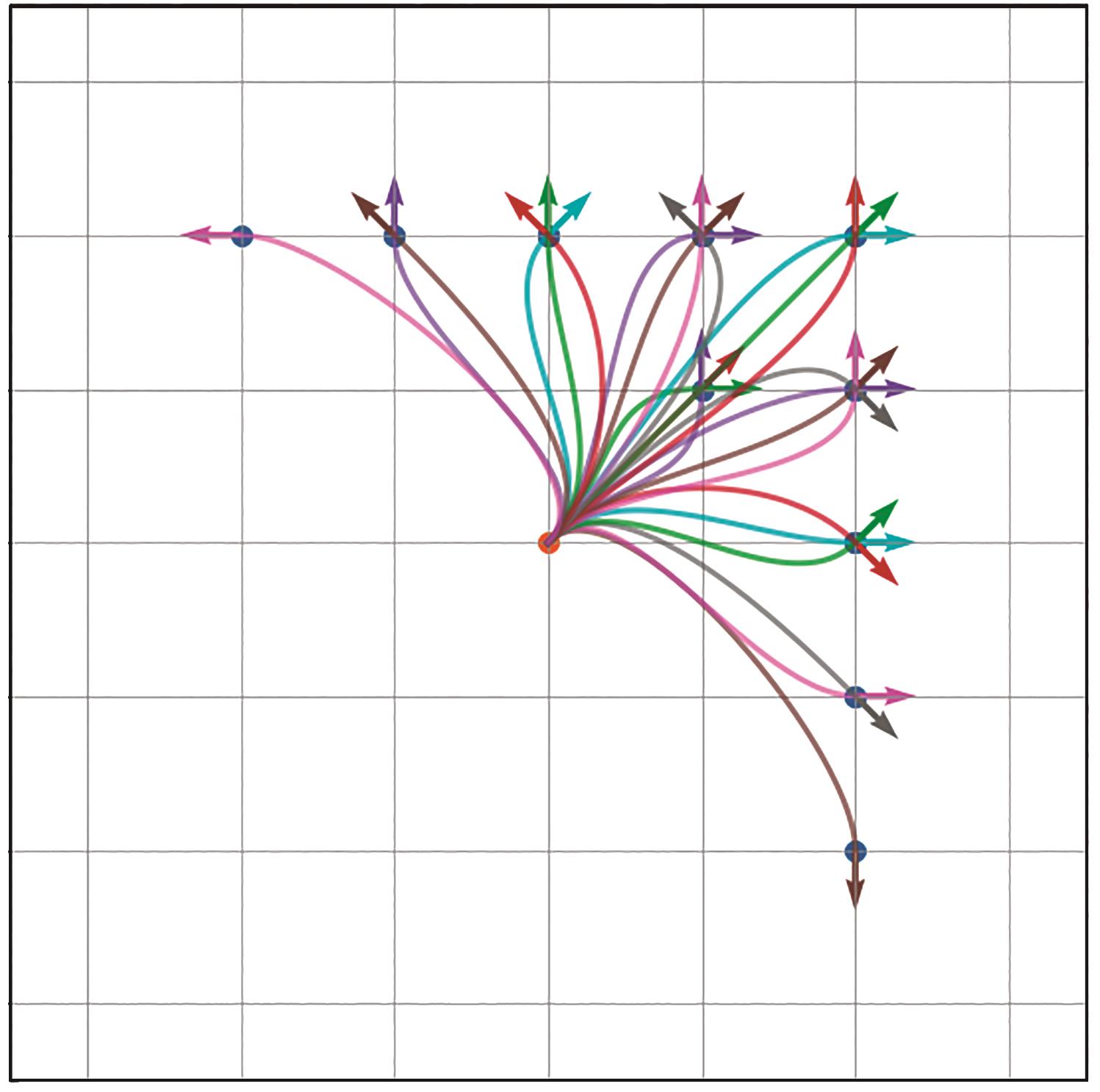
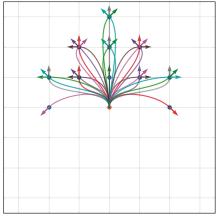
Fig. 5
Search step set of node(0,0,π/2)

Fig. 6
Algorithm flowchart
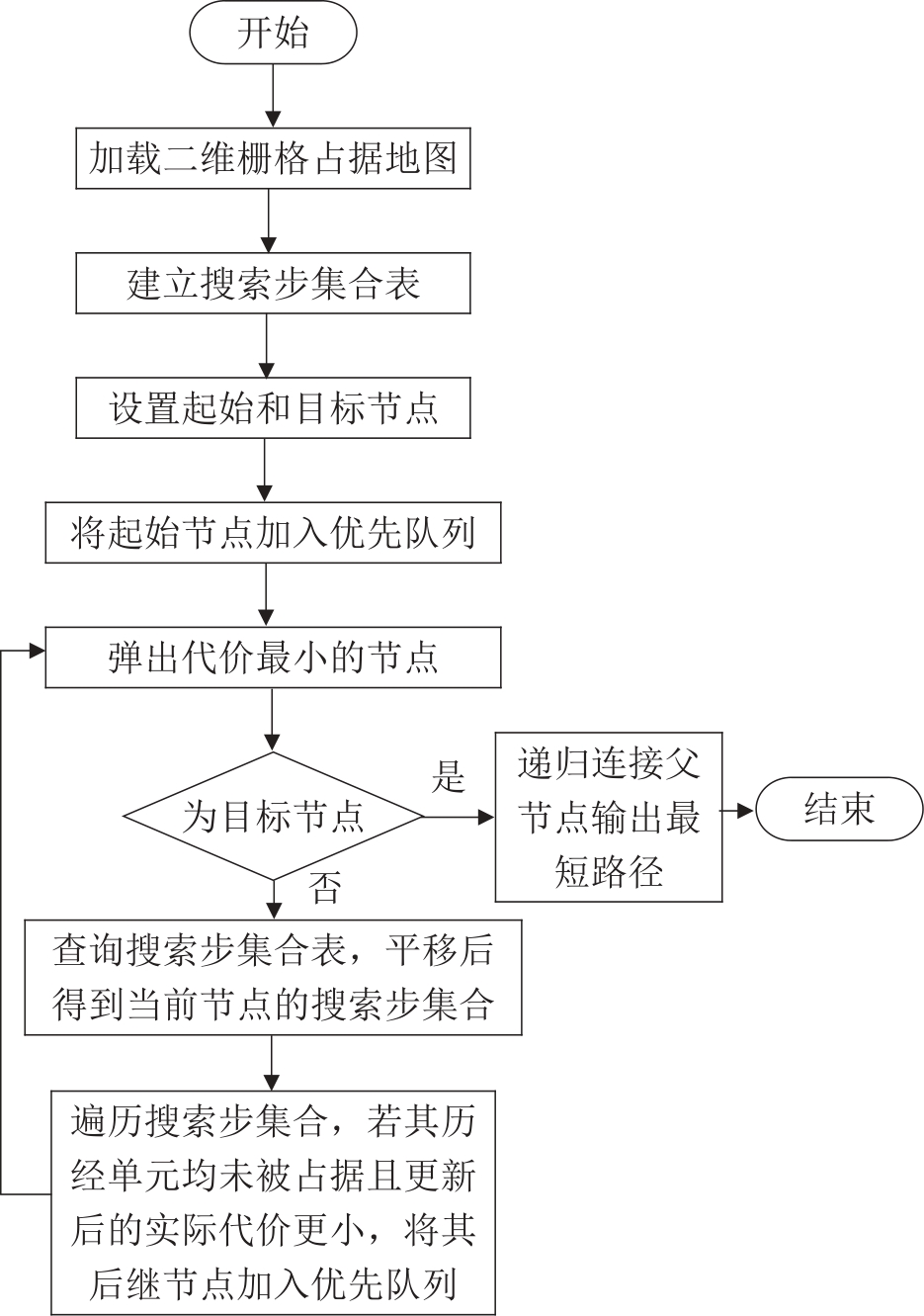
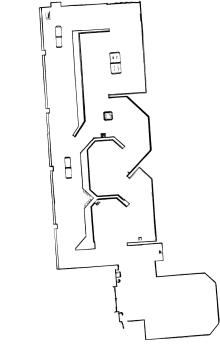
Fig. 7
Occupancy grid map
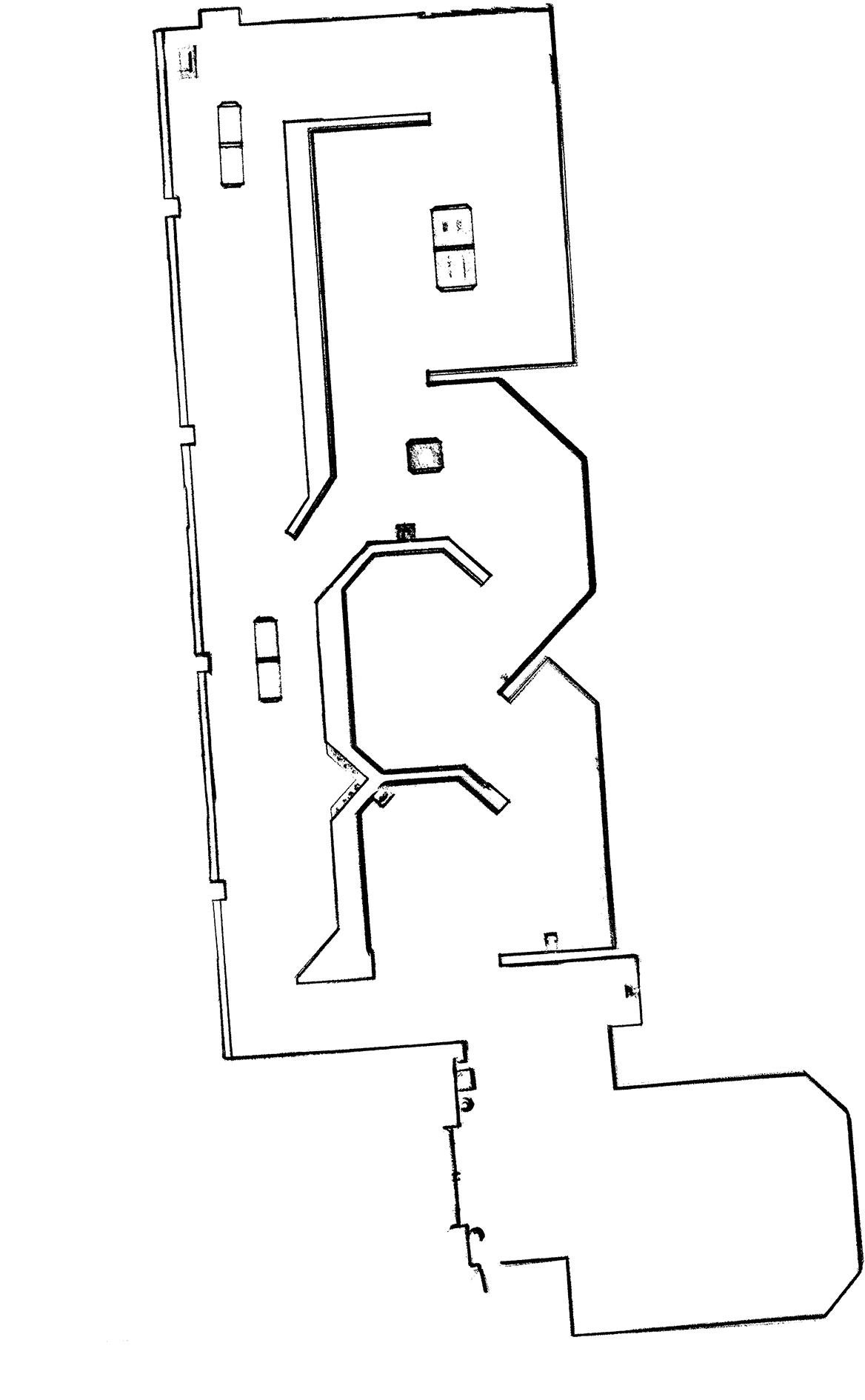

Fig. 8
Distribution of number of expanded nodes
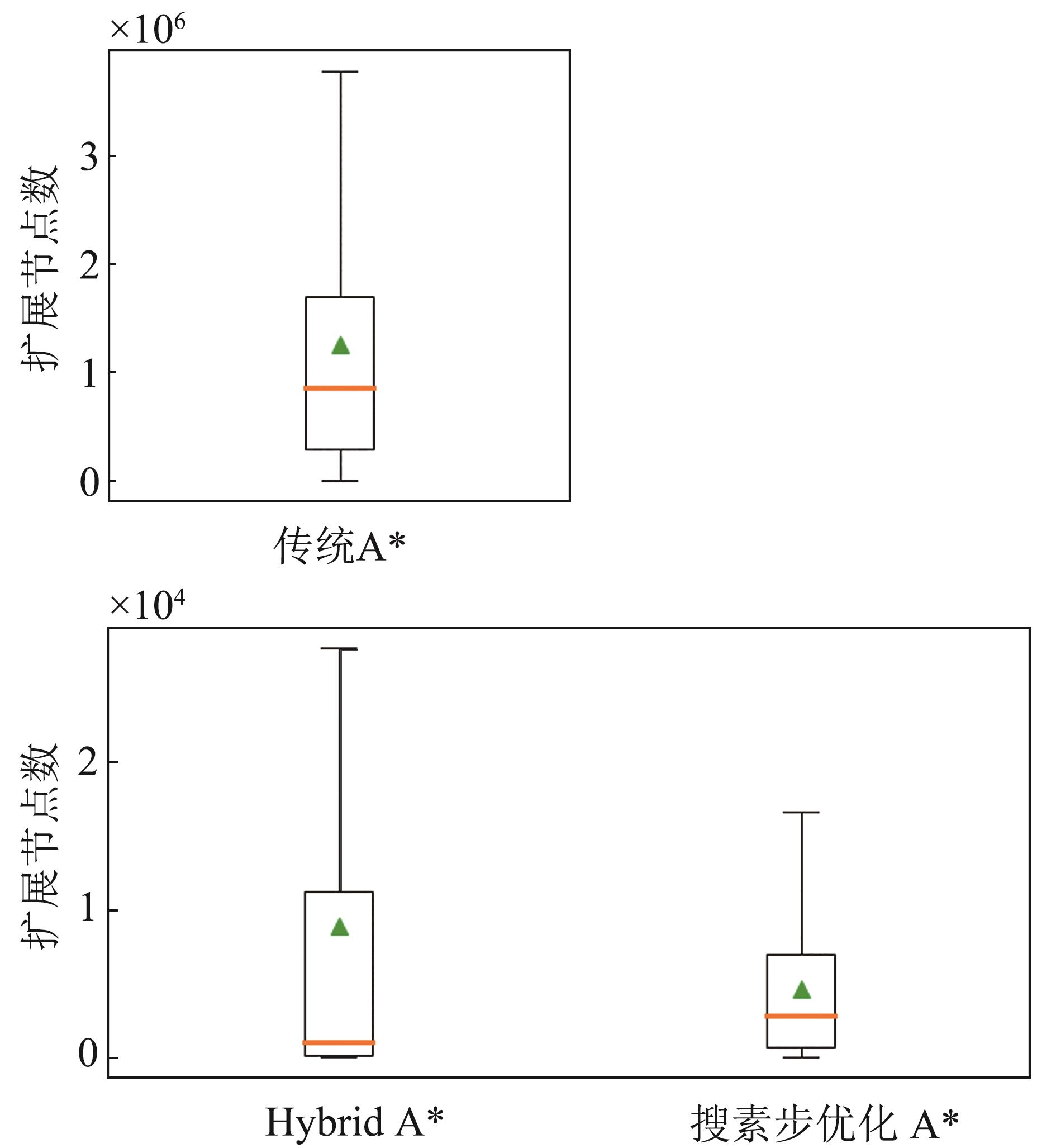
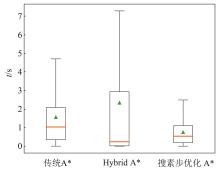
Fig. 9
Distribution of planning time

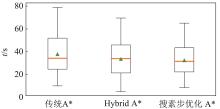
Fig. 10
Distribution of movement time


Fig. 11
A* algorithm as global planner


Fig. 12
Hybrid A* algorithm as global planner


Fig. 13
Search-step optimized A* algorithm as global planner

| 1 | 中华人民共和国中央人民政府. 十五部门关于印发《"十四五"机器人产业发展规划》的通知: 工信部联规〔2021〕206号[EB/OL]. (2021-12-21) [2023-12-18]. . |
| 2 | 崔炜, 朱发证. 机器人导航的路径规划算法研究综述[J]. 计算机工程与应用, 2023, 59(19): 10-20. |
| Cui Wei, Zhu Fazheng. Review of Path Planning Algorithms for Robot Navigation[J]. Computer Engineering and Applications, 2023, 59(19): 10-20. | |
| 3 | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 4 | Dolgov D, Thrun S, Montemerlo M, et al. Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments[J]. The International Journal of Robotics Research, 2010, 29(5): 485-501. |
| 5 | Sedighi S, Nguyen D V, Kapsalas P, et al. Implementing Voronoi-based Guided Hybrid A* in Global Path Planning for Autonomous Vehicles[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Piscataway: IEEE, 2019: 3845-3852. |
| 6 | Karaman S, Frazzoli E. Sampling-based Algorithms for Optimal Motion Planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 7 | Webb D J, Jur van den Berg. Kinodynamic RRT*: Asymptotically Optimal Motion Planning for Robots with Linear Dynamics[C]//2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2013: 5054-5061. |
| 8 | Yavari M, Gupta K, Mehrandezh M. Lazy Steering RRT*: An Optimal Constrained Kinodynamic Neural Network Based Planner with No In-exploration Steering[C]//2019 19th International Conference on Advanced Robotics (ICAR). Piscataway: IEEE, 2019: 400-407. |
| 9 | Wang Jiankun, Li Baopu, Meng Q H. Kinematic Constrained Bi-directional RRT with Efficient Branch Pruning for Robot Path Planning[J]. Expert Systems with Applications, 2021, 170: 114541. |
| 10 | Zheng Dongliang, Tsiotras P. Accelerating Kinodynamic RRT* Through Dimensionality Reduction[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2021: 3674-3680. |
| 11 | Ganesan Sivasankar, Senthil Kumar Natarajan, Thondiyath Asokan. G-RRT*: Goal-oriented Sampling-based RRT* Path Planning Algorithm for Mobile Robot Navigation with Improved Convergence Rate[C]//Proceedings of the 2021 5th International Conference on Advances in Robotics. New York: ACM, 2022: 1-6. |
| 12 | Wang Xinda, Luo Xiao, Han Baoling, et al. Collision-free Path Planning Method for Robots Based on an Improved Rapidly-exploring Random Tree Algorithm[J]. Applied Sciences, 2020, 10(4): 1381. |
| 13 | Nie Zhibin, Yang Xiaobing, Gao Shihong, et al. Research on Autonomous Moving Robot Path Planning Based on Improved Particle Swarm Optimization[C]//2016 IEEE Congress on Evolutionary Computation (CEC). Piscataway: IEEE, 2016: 2532-2536. |
| 14 | Rashid Razif, Perumal N, Elamvazuthi I, et al. Mobile Robot Path Planning Using Ant Colony Optimization[C]//2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA). Piscataway: IEEE, 2016: 1-6. |
| 15 | Hashim Fatma A, Hussien Abdelazim G. Snake Optimizer: A Novel Meta-heuristic Optimization Algorithm[J]. Knowledge-Based Systems, 2022, 242: 108320. |
| 16 | 李涛, 赵宏生. 基于进化蚁群算法的移动机器人路径优化[J]. 控制与决策, 2023, 38(3): 612-620. |
| Li Tao, Zhao Hongsheng. Path Optimization for Mobile Robot Based on Evolutionary Ant Colony Algorithm[J]. Control and Decision, 2023, 38(3): 612-620. | |
| 17 | 陆顺意, 何庆, 王艺蒙, 等. 用于移动机器人路径规划的增强型蛇优化算法[J]. 传感器与微系统, 2023, 42(12): 127-129, 133. |
| Lu Shunyi, He Qing, Wang Yimeng, et al. Enhanced Snake Optimization Algorithm for Mobile Robot Path Planning[J]. Transducer and Microsystem Technologies, 2023, 42(12): 127-129, 133. | |
| 18 | Zhang Tianrui, Xu Jianan, Wu Baoku. Hybrid Path Planning Model for Multiple Robots Considering Obstacle Avoidance[J]. IEEE Access, 2022, 10: 71914-71935. |
| 19 | Watkins C J C H, Dayan Peter. Q-learning[J]. Machine Learning, 1992, 8(3): 279-292. |
| 20 | Kontoudis G P, Vamvoudakis K G. Kinodynamic Motion Planning with Continuous-time Q-learning: An Online, Model-free, and Safe Navigation Framework[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(12): 3803-3817. |
| 21 | 沈克宇, 游志宇, 刘永鑫, 等. 基于改进A*算法的移动机器人路径规划[J]. 计算机应用研究, 2023, 40(1): 75-79. |
| Shen Keyu, You Zhiyu, Liu Yongxin, et al. Mobile Robot Planning Based on Improved A* Algorithm[J]. Application Research of Computers, 2023, 40(1): 75-79. | |
| 22 | 潘富强, 曾成, 马国红, 等. 一种融合改进A*算法与改进动态窗口法的AGV路径规划[J]. 传感技术学报, 2023, 36(1): 68-77. |
| Pan Fuqiang, Zeng Cheng, Ma Guohong, et al. A Novel AGV Path Planning Algorithm Based on Improved A* Algorithm and Improved Dynamic Window Approach[J]. Chinese Journal of Sensors and Actuators, 2023, 36(1): 68-77. | |
| 23 | 郭大林, 王淑营, 曾文驱, 等. 改进A*算法的路径规划在列检环境中的应用[J]. 计算机工程与设计, 2023, 44(1): 299-306. |
| Guo Dalin, Wang Shuying, Zeng Wenqu, et al. Application of Path Planning Based on Improved A* Algorithm in Train Inspection Environment[J]. Computer Engineering and Design, 2023, 44(1): 299-306. | |
| 24 | 姚得鑫, 伞红军, 王雅如, 等. 移动机器人路径规划中A*算法的改进研究[J]. 系统仿真学报, 2024, 36(11): 2684-2698. |
| Yao Dexin, Hongjun San, Wang Yaru, et al. Improvement of A* Algorithm in Path Planning of Mobile Robot[J]. Journal of System Simulation, 2024, 36(11): 2684-2698. | |
| 25 | 孙军艳, 吴焕钦, 王子豪. 基于改进A*算法的多AGV路径规划及避障研究[J]. 西安理工大学学报, 2024, 40(2): 242-252. |
| Sun Junyan, Wu Huanqin, Wang zi Hao. Multi-AGV Based on Improved A* Algorithm Path Planning and Obstacle Avoidance Research[J]. Journal of Xi'an University of Technology, 2024, 40(2): 242-252. | |
| 26 | Zhou Boyu, Gao Fei, Wang Luqi, et al. Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3529-3536. |
| 27 | Zhao Yu, Zhu Yongqiang, Zhang Pingxia, et al. A Hybrid A* Path Planning Algorithm Based on Multi-objective Constraints[C]//2022 Asia Conference on Advanced Robotics, Automation, and Control Engineering (ARACE). Piscataway: IEEE, 2022: 1-6. |
| 28 | 张浩杰, 张玉东, 梁荣敏, 等. 改进A* 算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45(2): 513-520. |
| Zhang Haojie, Zhang Yudong, Liang Rongmin, et al. Energy-efficient Path Planning Method for Robots Based on Improved A* Algorithm[J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. | |
| 29 | Zhao Lin, Zhang Xinghui, Ren Weiyan. A Lévy-inspired Kinodynamic A* Algorithm for Quadrotor Fast Path Searching[C]//2021 IEEE 7th International Conference on Cloud Computing and Intelligent Systems (CCIS). Piscataway: IEEE, 2021: 350-355. |
| 30 | Roesmann C, Feiten W, Woesch T, et al. Trajectory Modification Considering Dynamic Constraints of Autonomous Robots[C]//ROBOTIK 2012; 7th German Conference on Robotics. Piscataway: IEEE, 2012: 1-6. |
| 31 | Yu Jingjin. Average Case Constant Factor Time and Distance Optimal Multi-robot Path Planning in Well-connected Environments[J]. Autonomous Robots, 2020, 44(3): 469-483. |
| 32 | Han Ruihua, Chen Shengduo, Wang Shuaijun, et al. Reinforcement Learned Distributed Multi-robot Navigation with Reciprocal Velocity Obstacle Shaped Rewards[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 5896-5903. |
| 33 | Chandra R, Manocha D. GamePlan: Game-theoretic Multi-agent Planning with Human Drivers at Intersections, Roundabouts, and Merging[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2676-2683. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
