

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (11): 2684-2698.doi: 10.16182/j.issn1004731x.joss.23-0968
Previous Articles Next Articles
Yao Dexin1,2, San Hongjun1,2, Wang Yaru3, Sun Haijie1,2, Chen Jiupeng1,2, Yang Xiaoyuan1,2
Received:2023-07-31
Revised:2023-10-11
Online:2024-11-13
Published:2024-11-19
Contact:
San Hongjun
CLC Number:
Yao Dexin, San Hongjun, Wang Yaru, Sun Haijie, Chen Jiupeng, Yang Xiaoyuan. Improvement of A* Algorithm in Path Planning of Mobile Robot[J]. Journal of System Simulation, 2024, 36(11): 2684-2698.
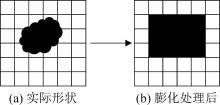
Fig. 1
Obstacle expansion processing in grid map
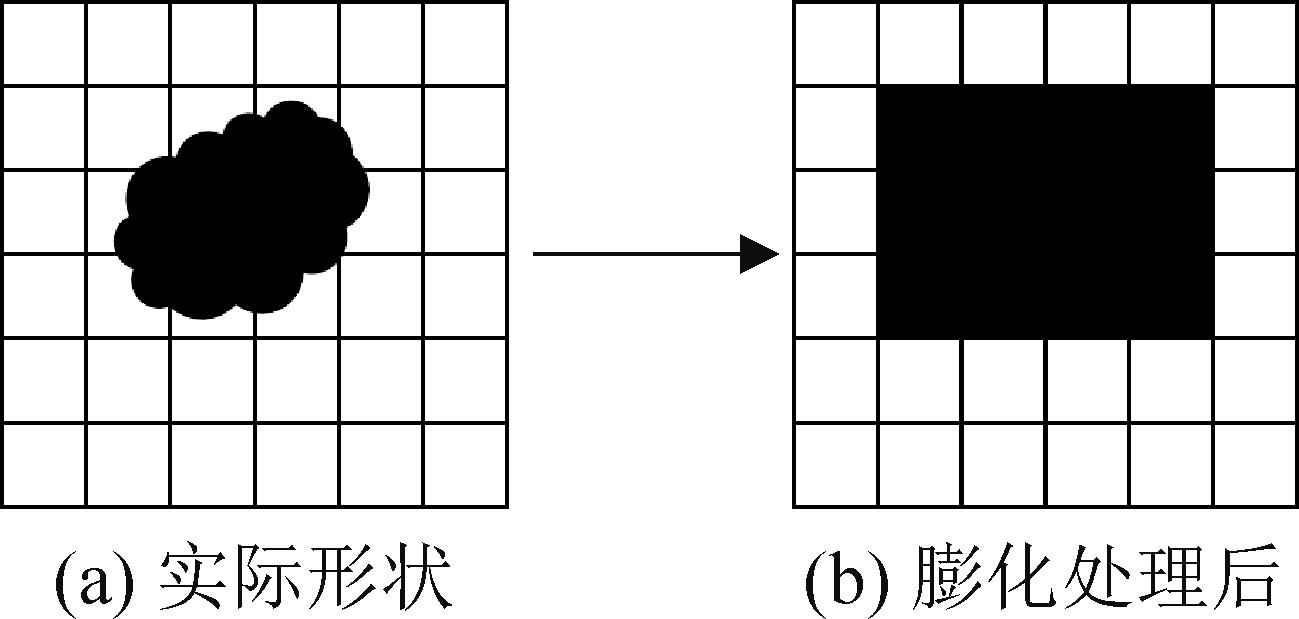
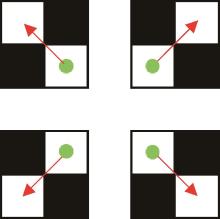
Fig. 2
Movable direction of mobile robot with surrounding obstacles
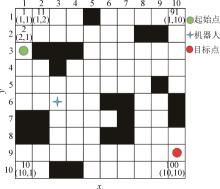
Fig. 3
Grid map environment and recognition
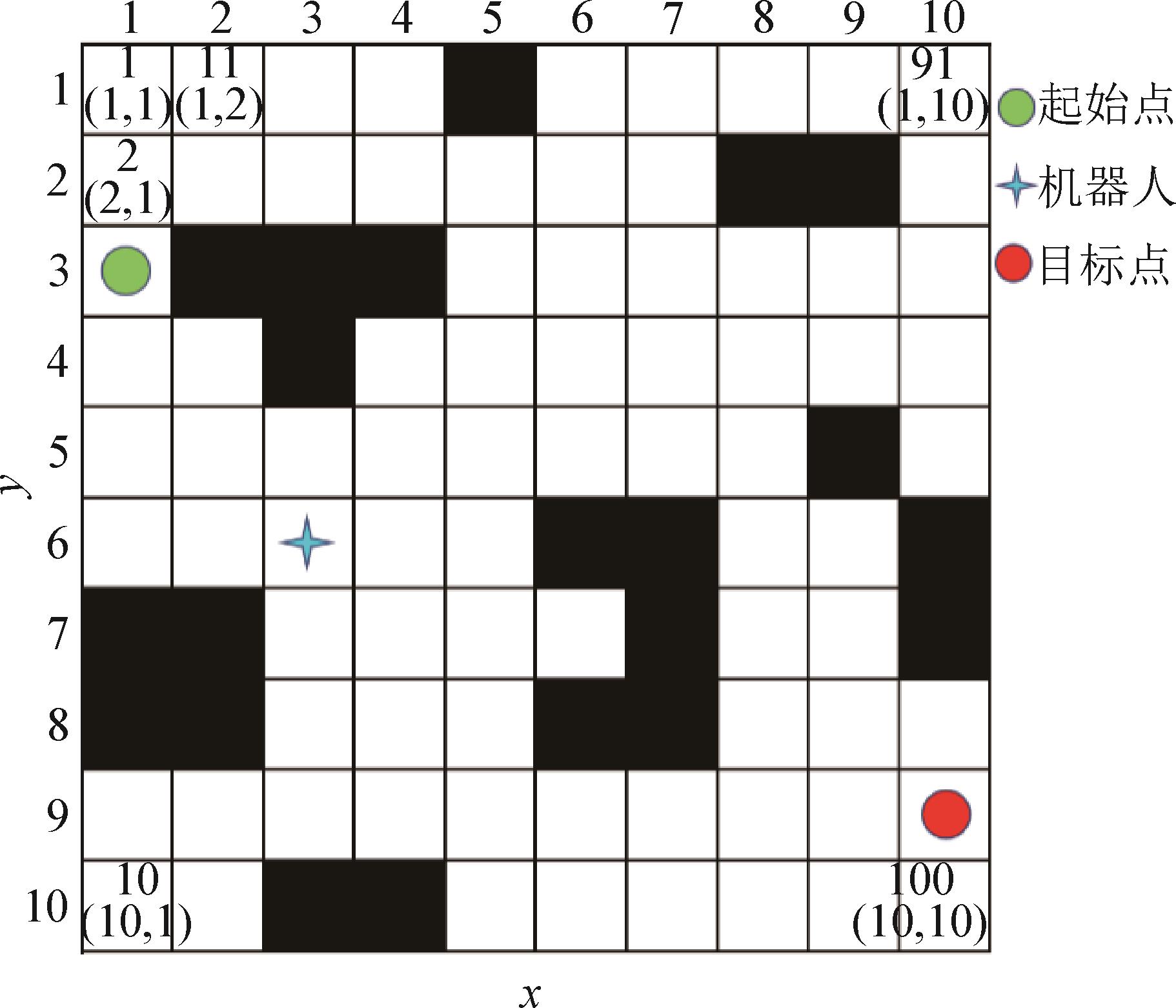
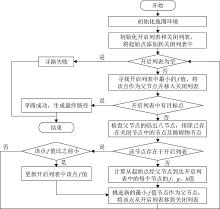
Fig. 4
Path search flow of A* algorithm
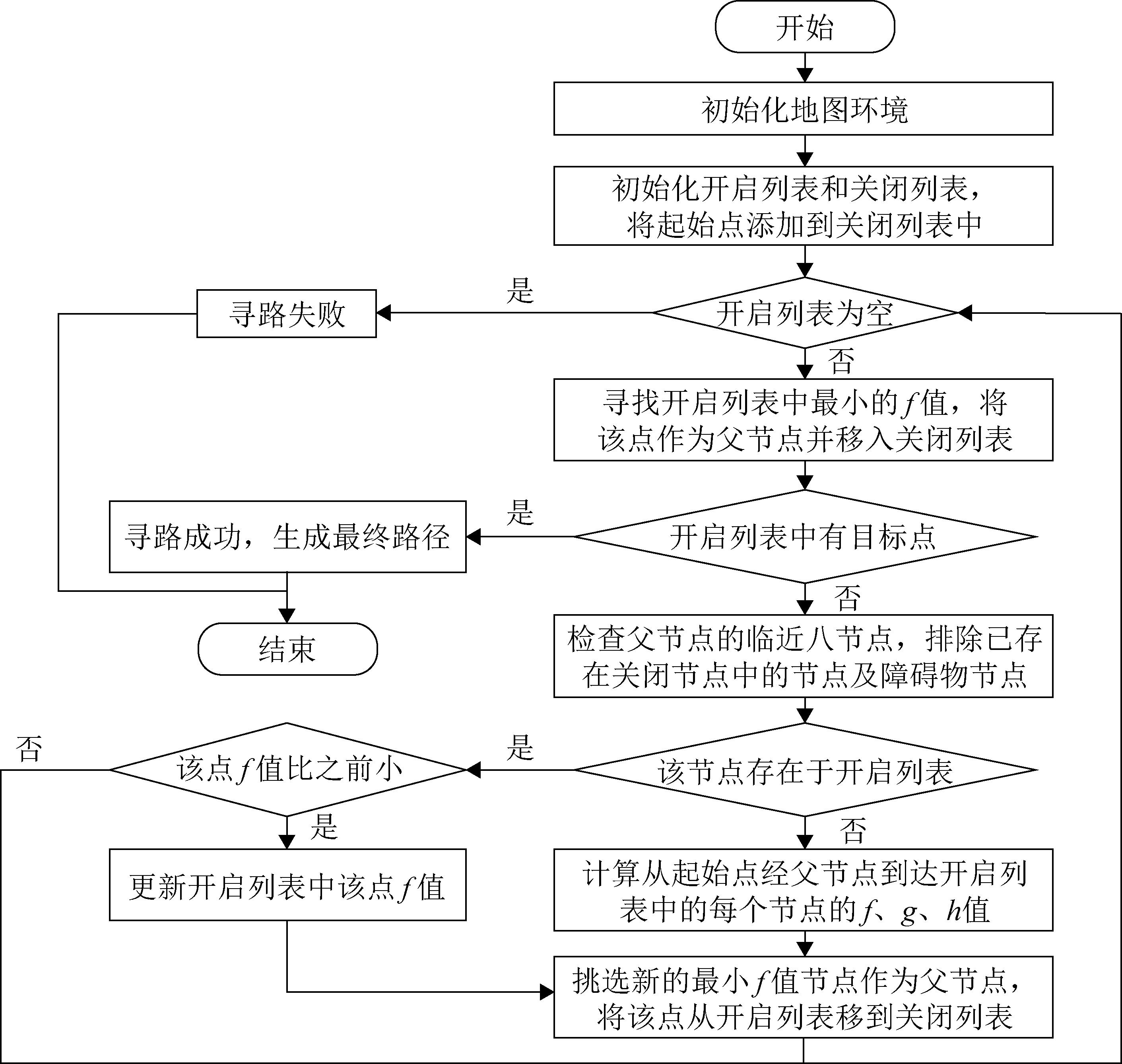
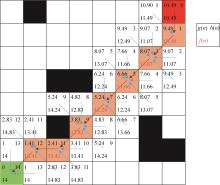
Fig. 5
Values of f, g, and h of the grid in the pathfinding of A* algorithm
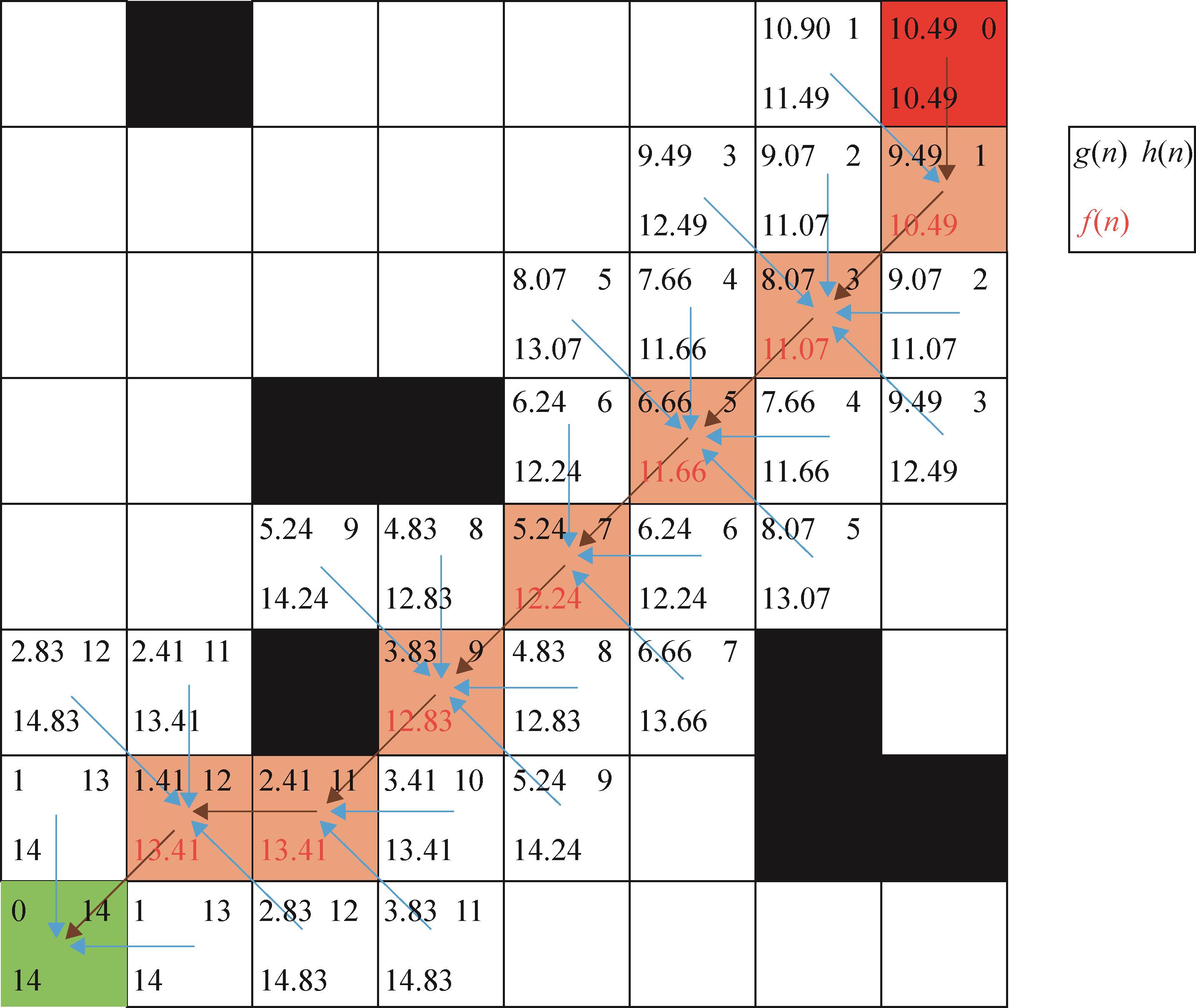
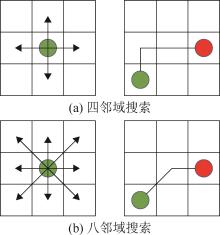
Fig. 6
Effect of mobile robots’ path planning in different search methods

Fig. 7
Priority level and path planning effect diagram of 16-direction search method
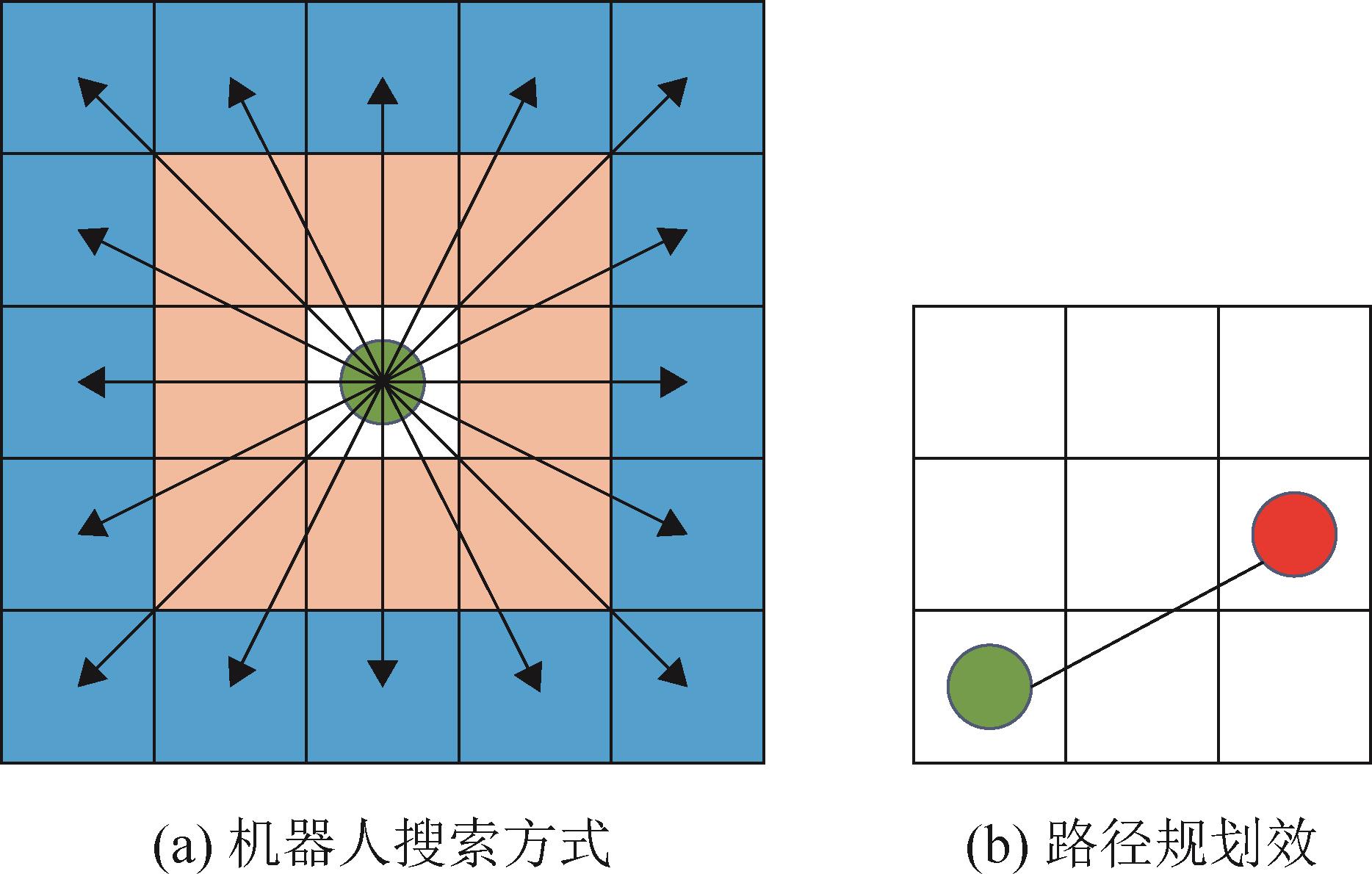

Fig. 8
Impassable cases in priority search level
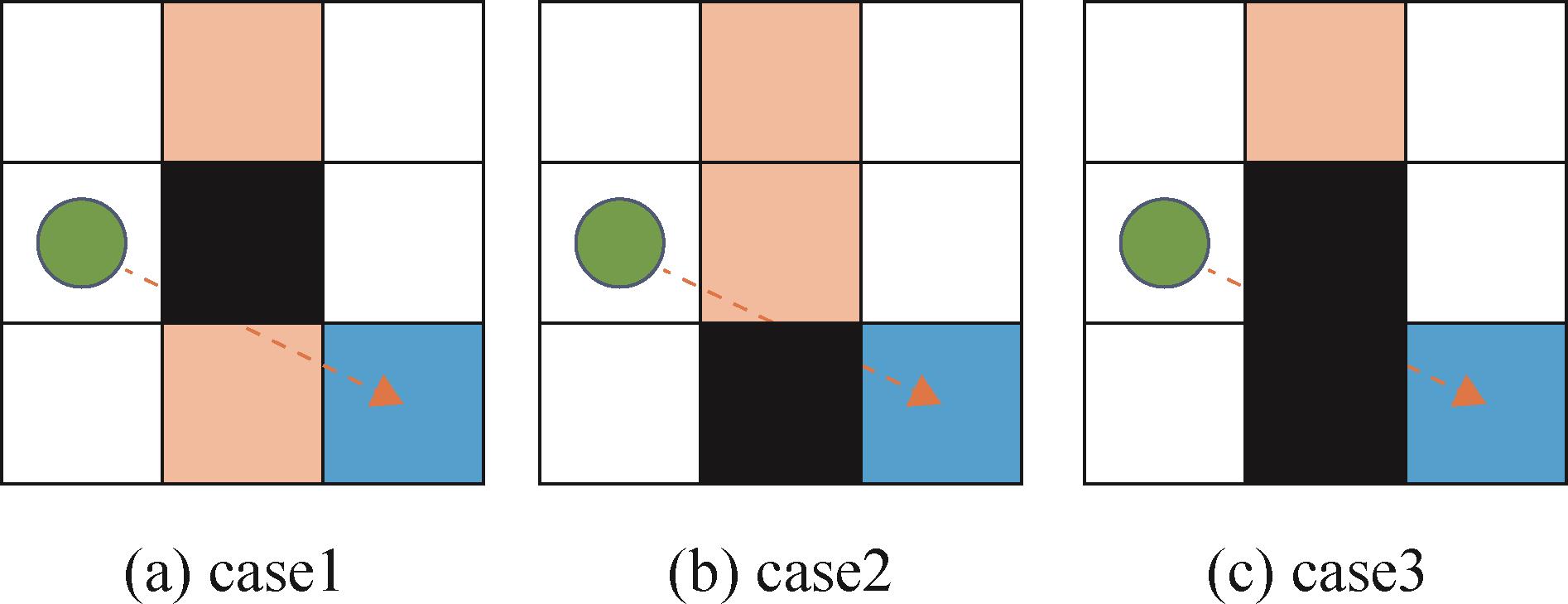
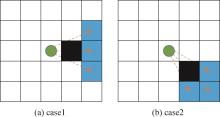
Fig. 9
Other grid impassability cases in priority search level
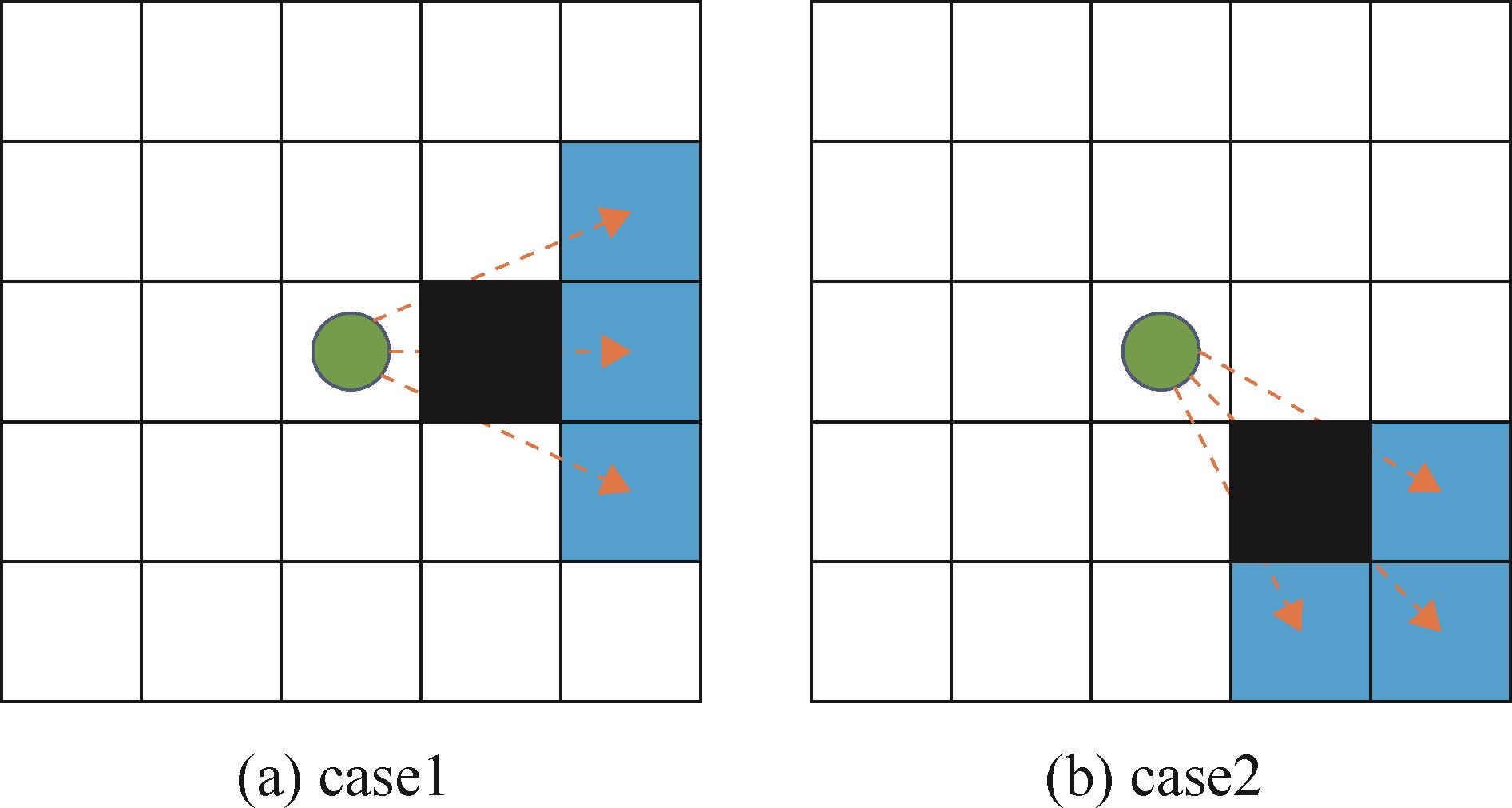
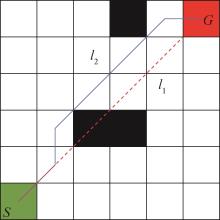
Fig. 10
Path search guide map
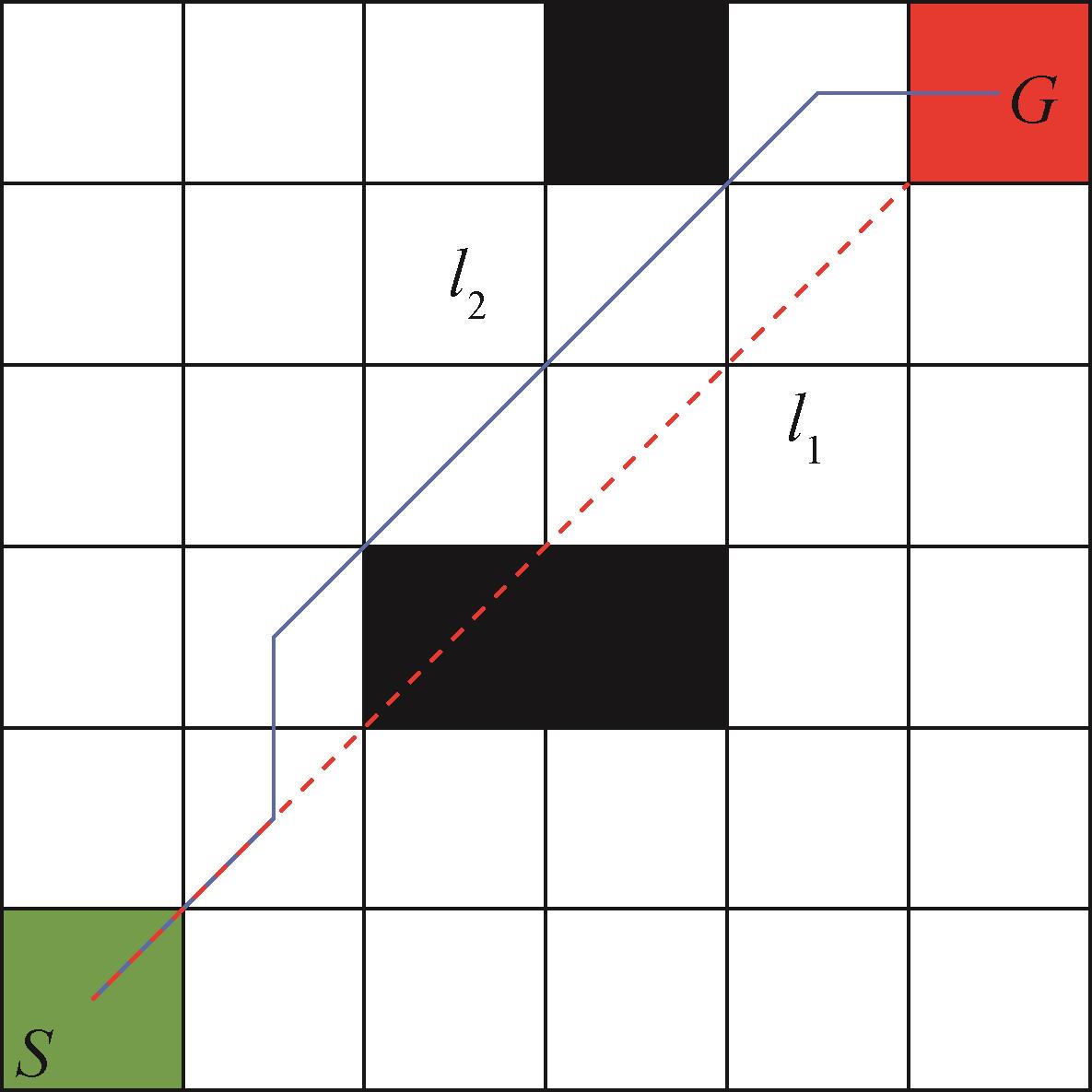
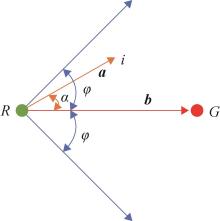
Fig. 11
Estimated angle and search angle in angle search algorithm
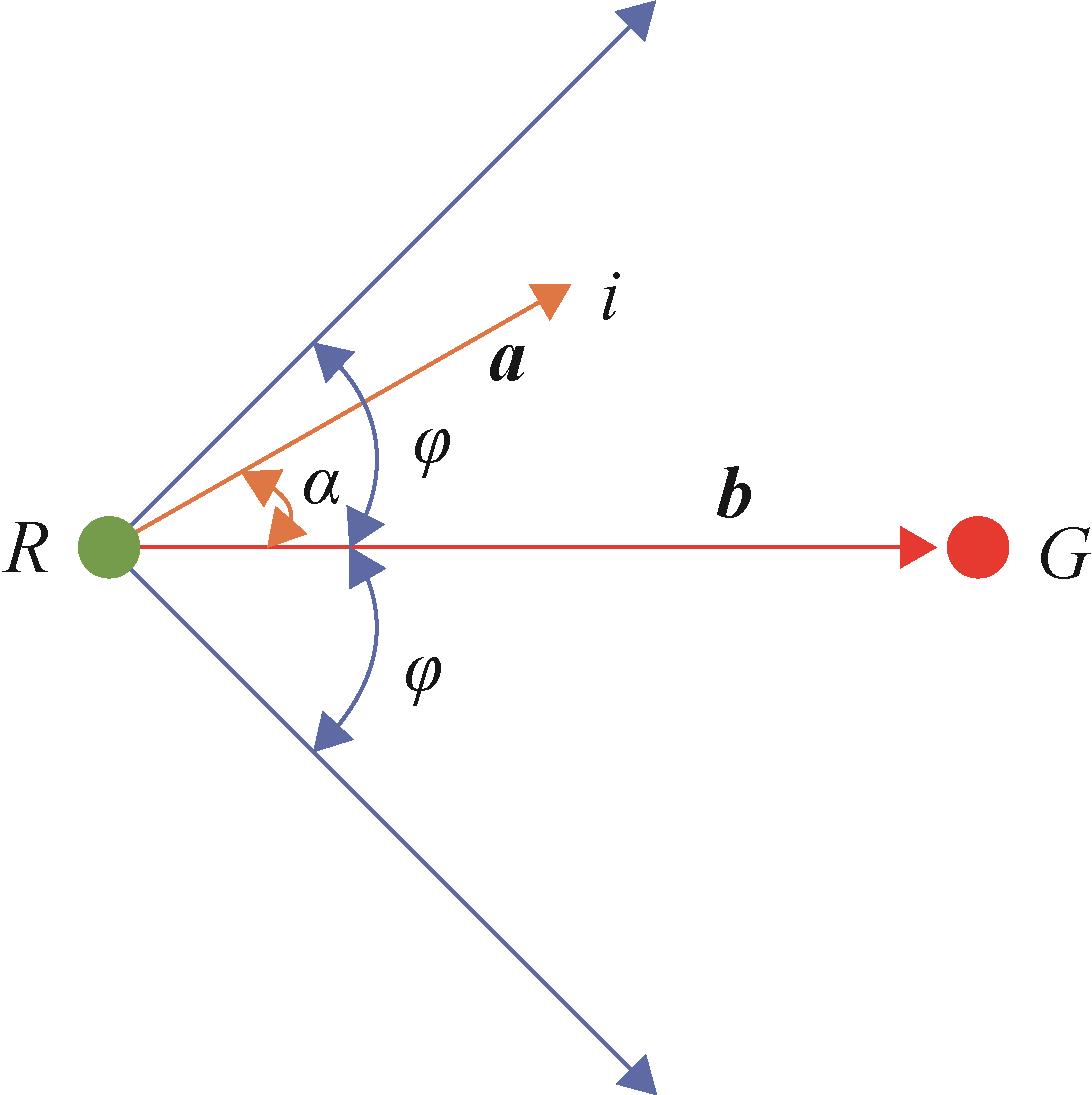
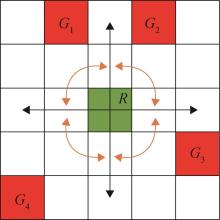
Fig. 12
Four relative positions of robot and target point
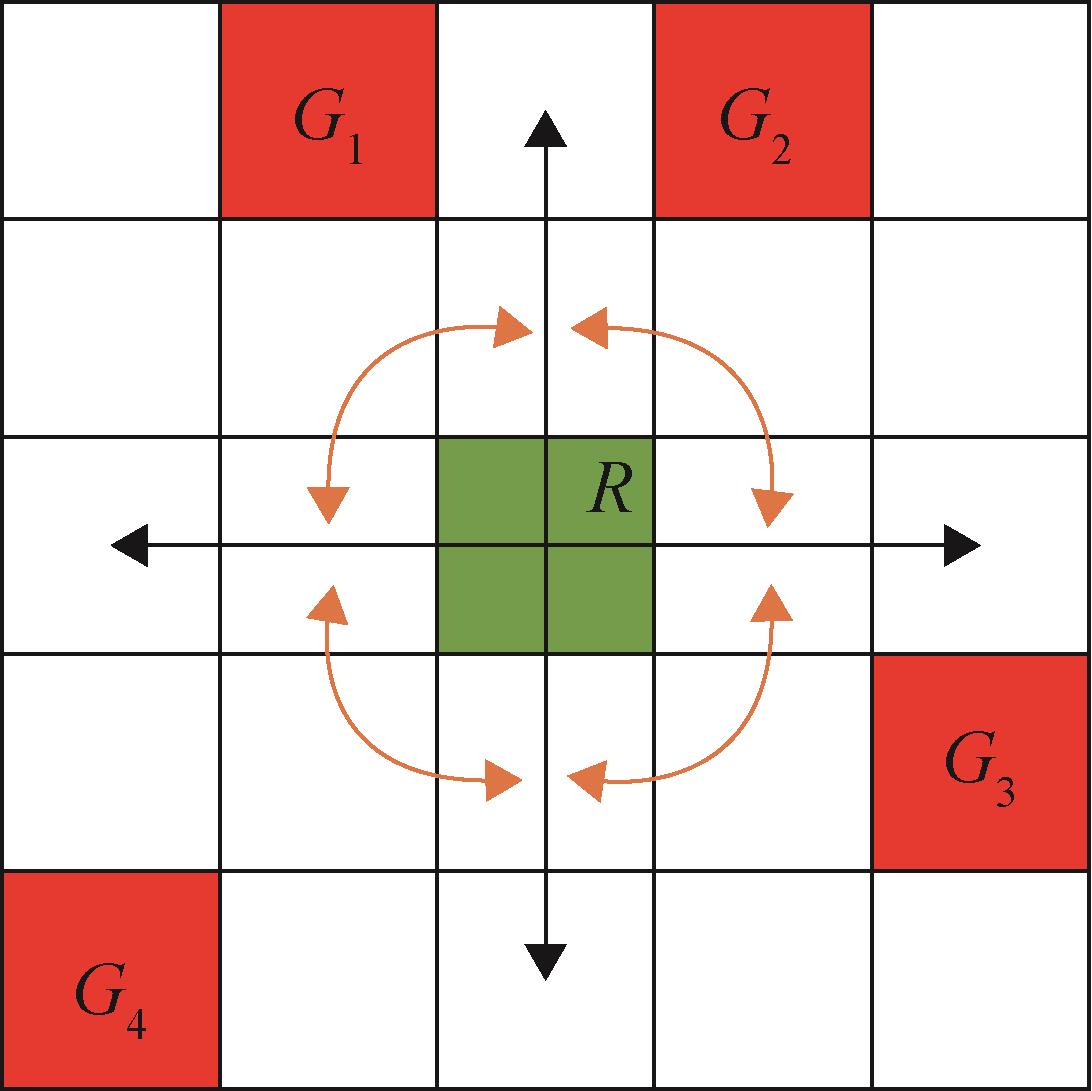
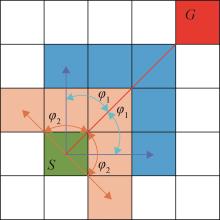
Fig. 13
Robot search angle in different search levels
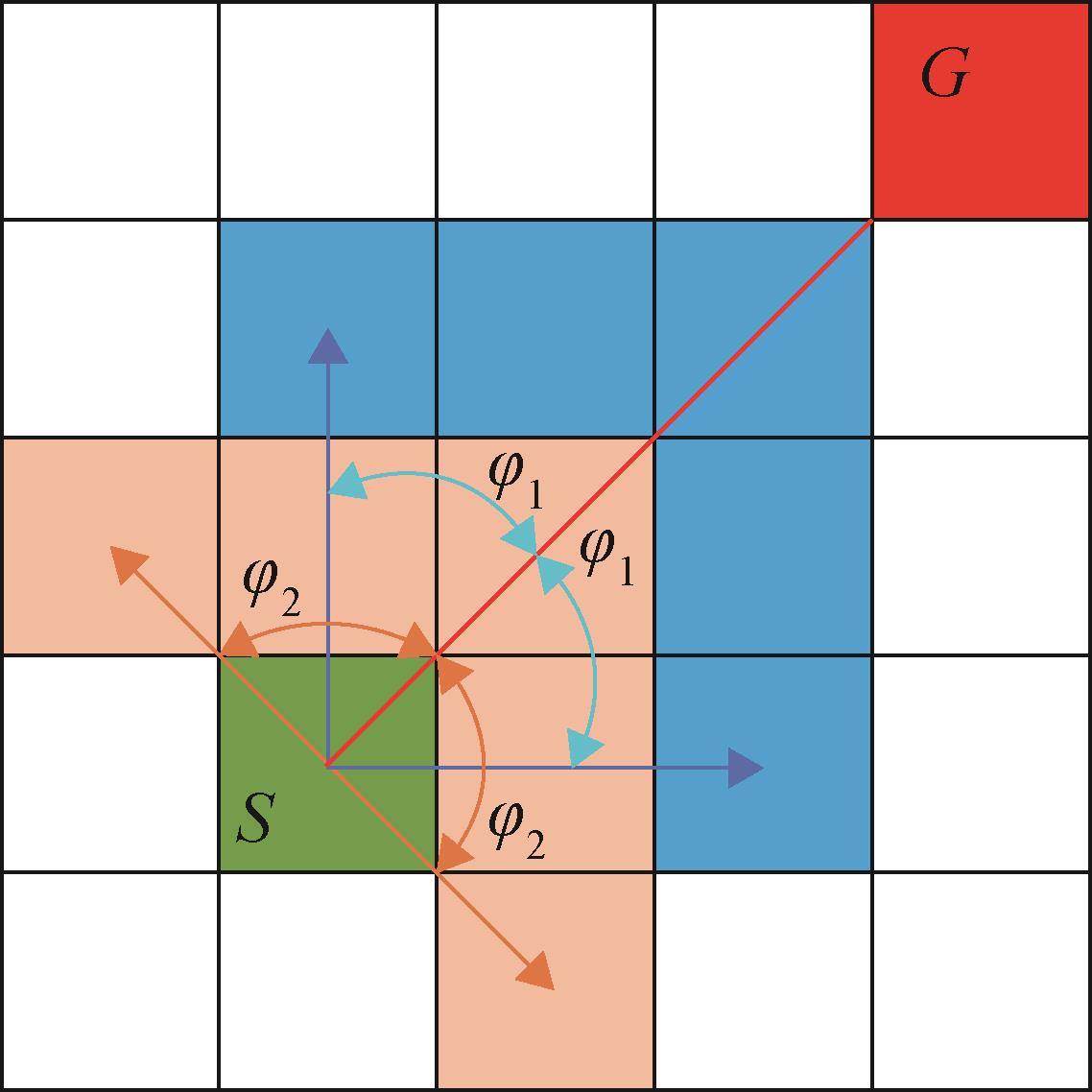
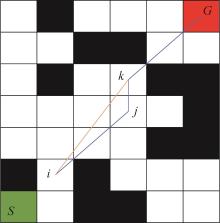
Fig. 14
Path smoothing effect
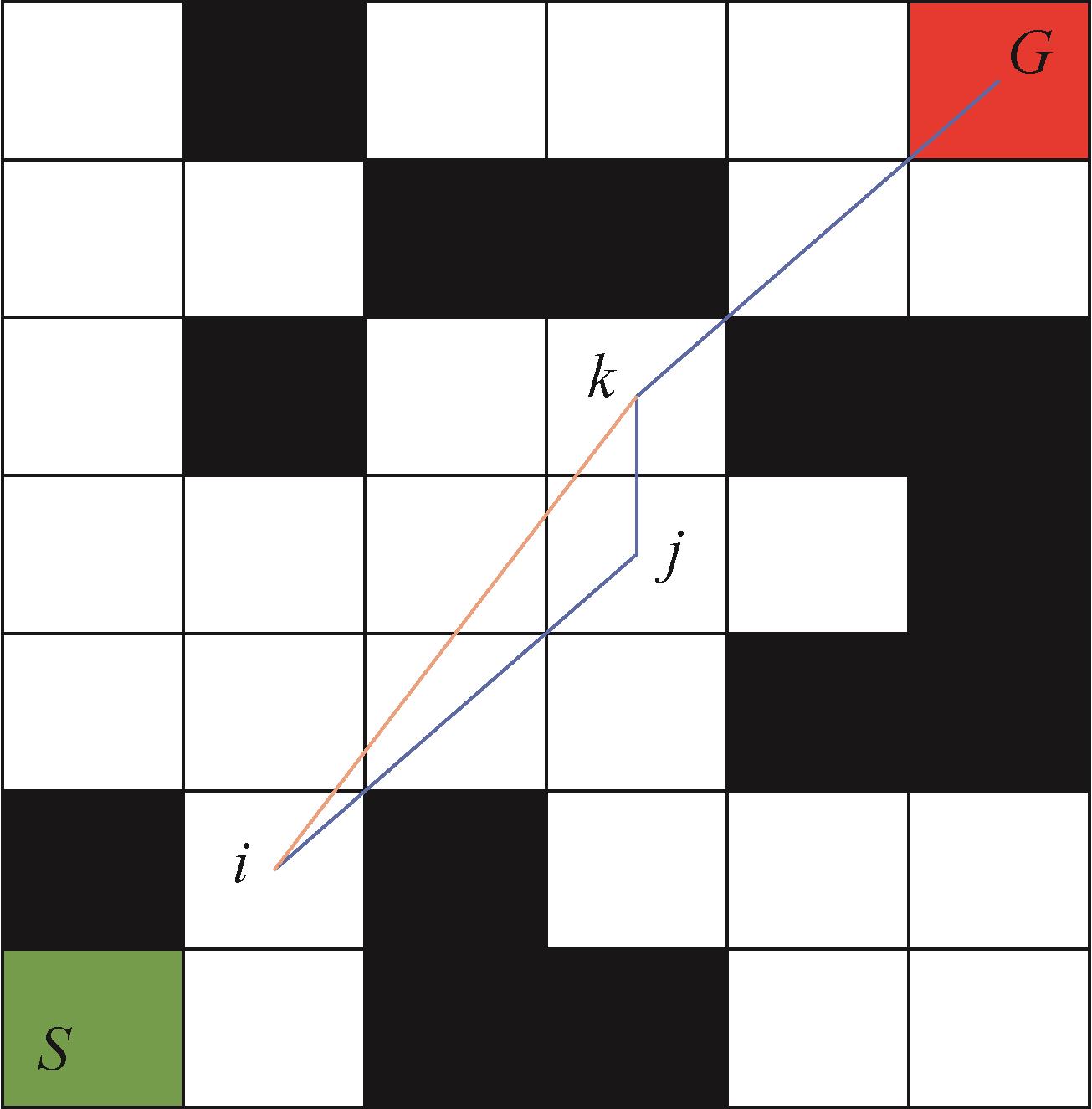
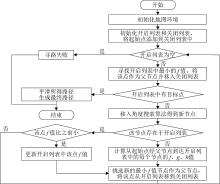
Fig. 15
Improved A* algorithm flow
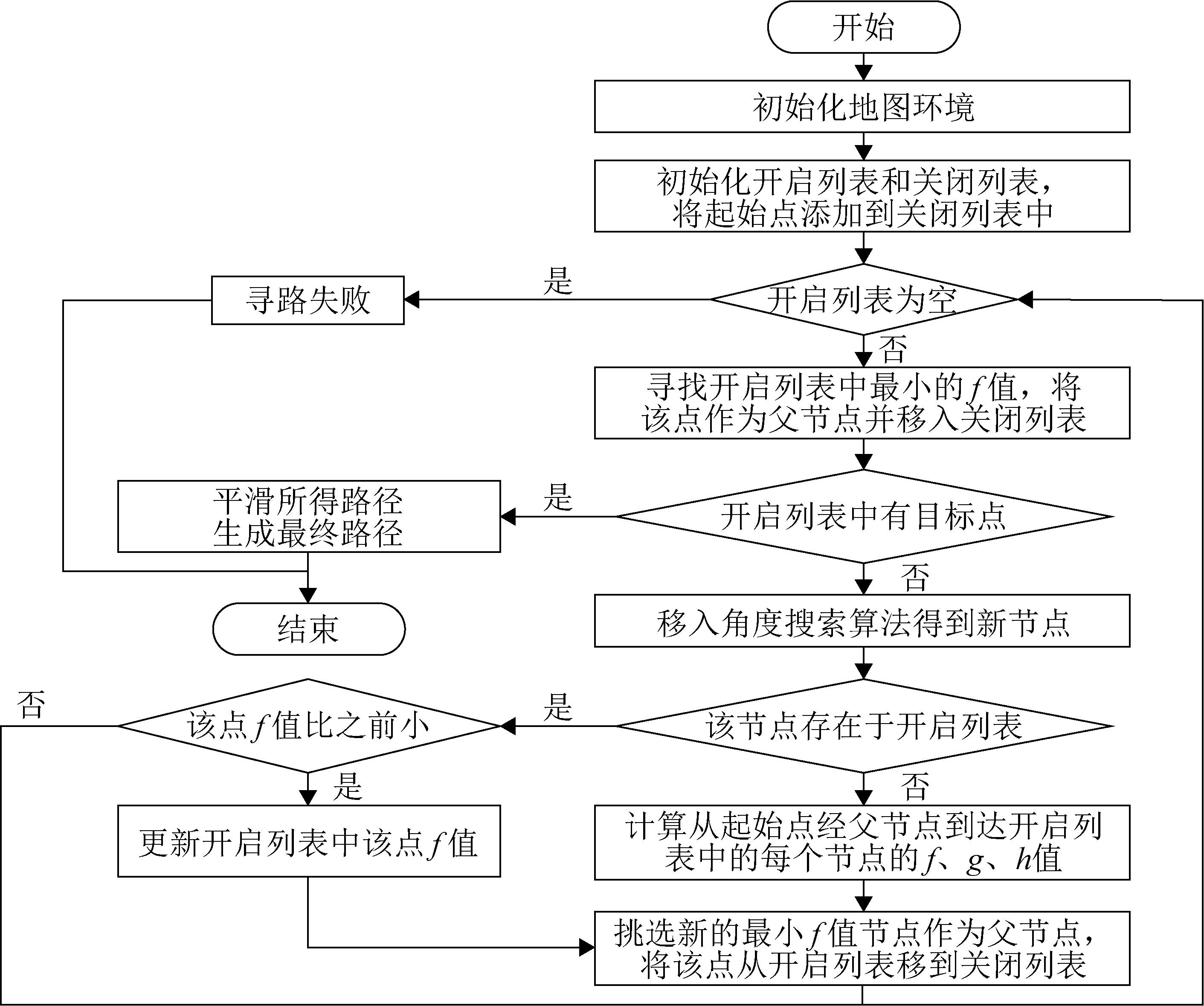

Fig. 16
Effect of path planning of three algorithms in simple environments
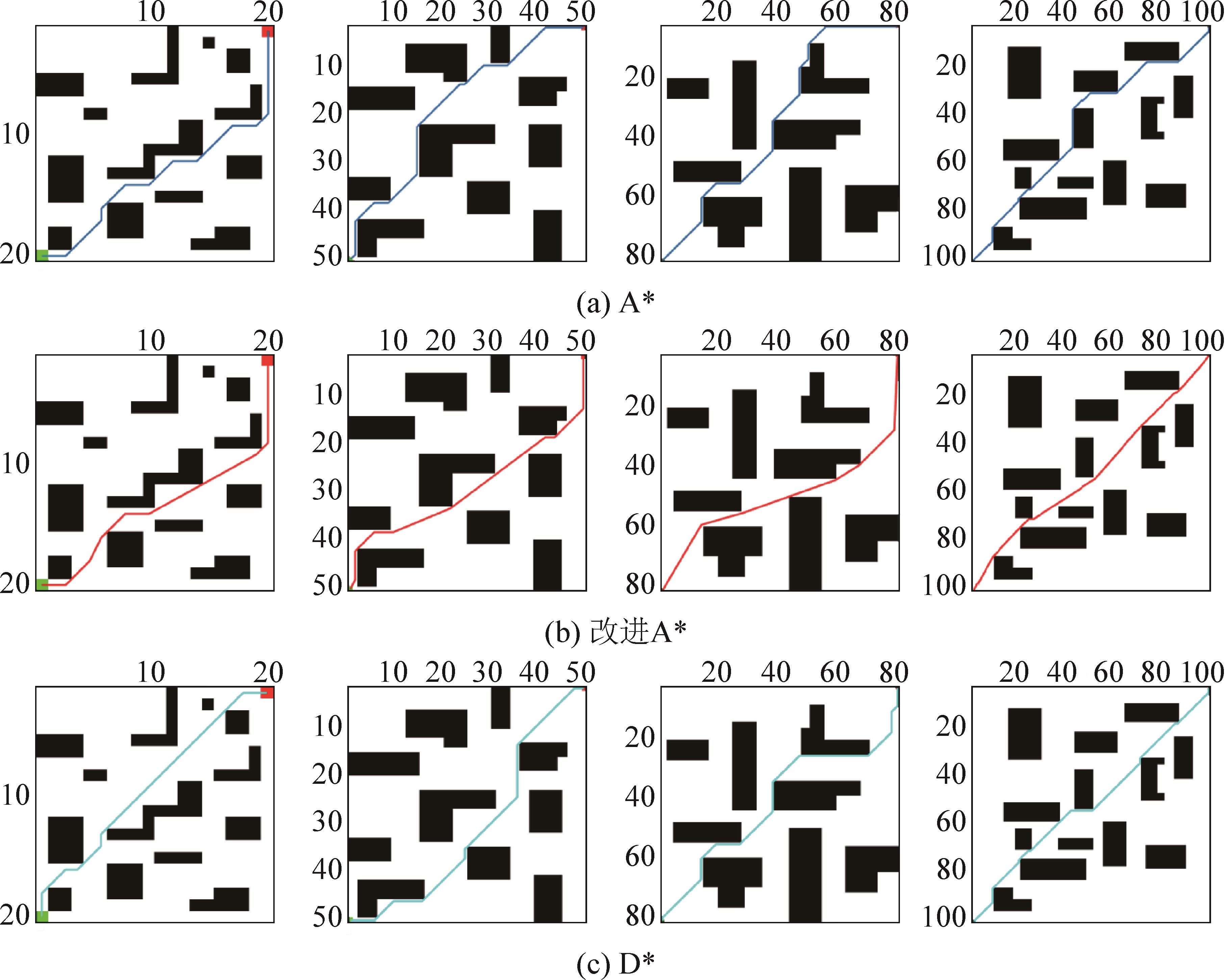
Table 1
Simulation experiment data of three algorithms in simple environments
| 地图尺寸 | 算法 | 平均计算时间/s | 路径长度 | 搜索节点数 | 路径折弯数 |
|---|---|---|---|---|---|
| 20×20 | A* | 0.004 58 | 31.556 | 69 | 10 |
| 改进A* | 0.003 24 | 30.603 | 30 | 6 | |
| D* | 0.041 41 | 28.627 | 313 | 6 | |
| 50×50 | A* | 0.022 83 | 79.255 | 236 | 11 |
| 改进A* | 0.008 85 | 77.378 | 100 | 8 | |
| D* | 0.280 05 | 77.359 | 1 830 | 8 | |
| 80×80 | A* | 0.045 14 | 130.468 | 388 | 11 |
| 改进A* | 0.015 43 | 124.936 | 169 | 4 | |
| D* | 1.239 53 | 129.882 | 4 609 | 12 | |
| 100×100 | A* | 0.055 85 | 154.651 | 448 | 13 |
| 改进A* | 0.021 82 | 142.086 | 222 | 8 | |
| D* | 3.252 59 | 146.451 | 7 859 | 13 |

Fig. 17
Effect of path planning of three algorithms in complex environments
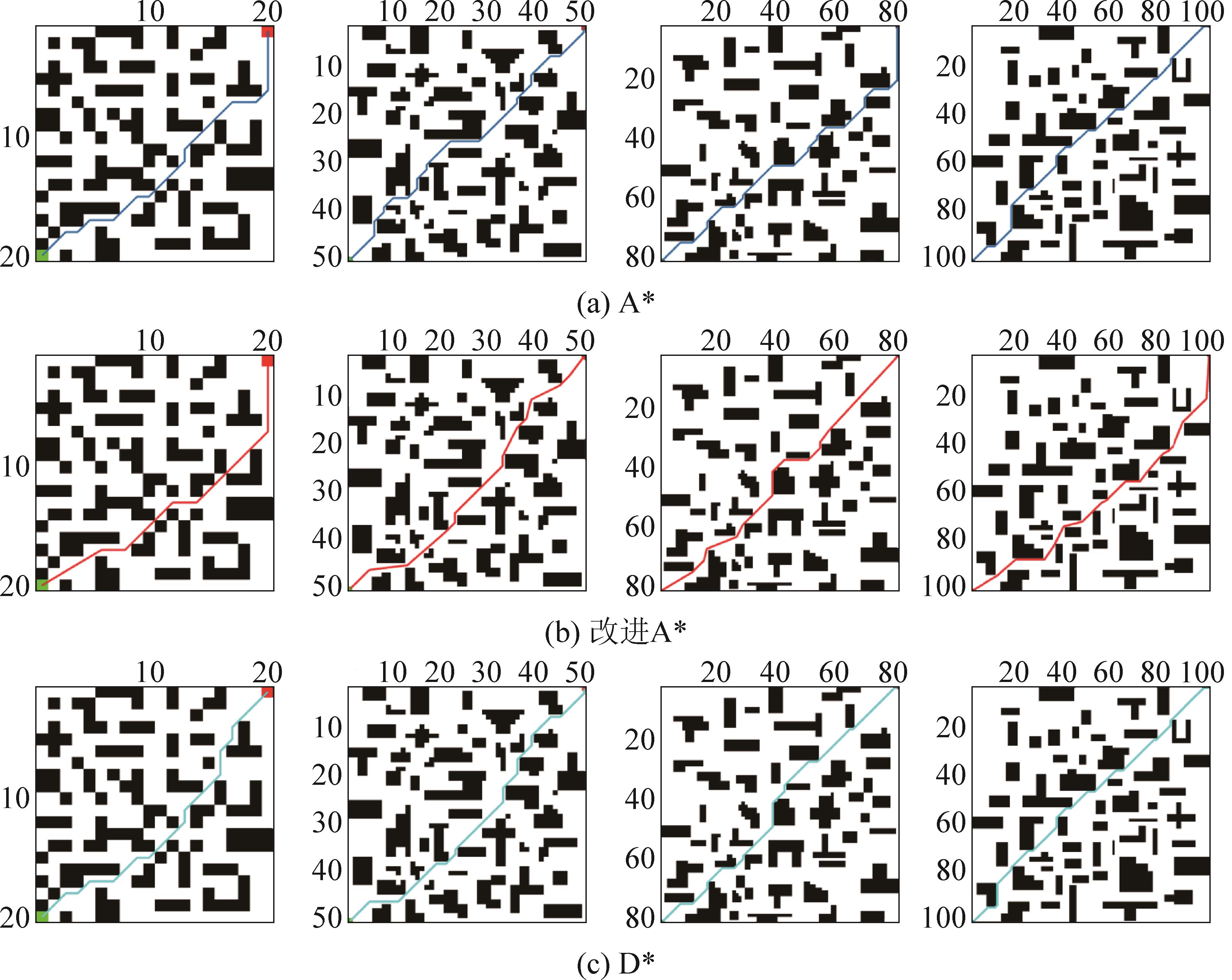
Table 2
Simulation experiment data of three algorithms in complex environments
| 地图尺寸 | 算法 | 平均计算时间/s | 路径长度 | 搜索节点数 | 路径折弯数 |
|---|---|---|---|---|---|
| 20×20 | A* | 0.004 32 | 30.384 | 66 | 11 |
| 改进A* | 0.002 55 | 29.973 | 25 | 5 | |
| D* | 0.037 04 | 29.213 | 267 | 12 | |
| 50×50 | A* | 0.019 83 | 75.740 | 220 | 19 |
| 改进A* | 0.007 62 | 74.501 | 90 | 10 | |
| D* | 0.260 48 | 75.154 | 1735 | 15 | |
| 80×80 | A* | 0.040 67 | 125.711 | 346 | 21 |
| 改进A* | 0.014 35 | 119.089 | 155 | 11 | |
| D* | 1.245 51 | 119.338 | 4 716 | 17 | |
| 100×100 | A* | 0.057 49 | 149.380 | 470 | 19 |
| 改进A* | 0.020 77 | 151.063 | 207 | 13 | |
| D* | 3.010 94 | 149.380 | 7 330 | 21 |

Fig. 18
Turtlebot2 mobile robot


Fig. 19
Lobal_planner implementation framework
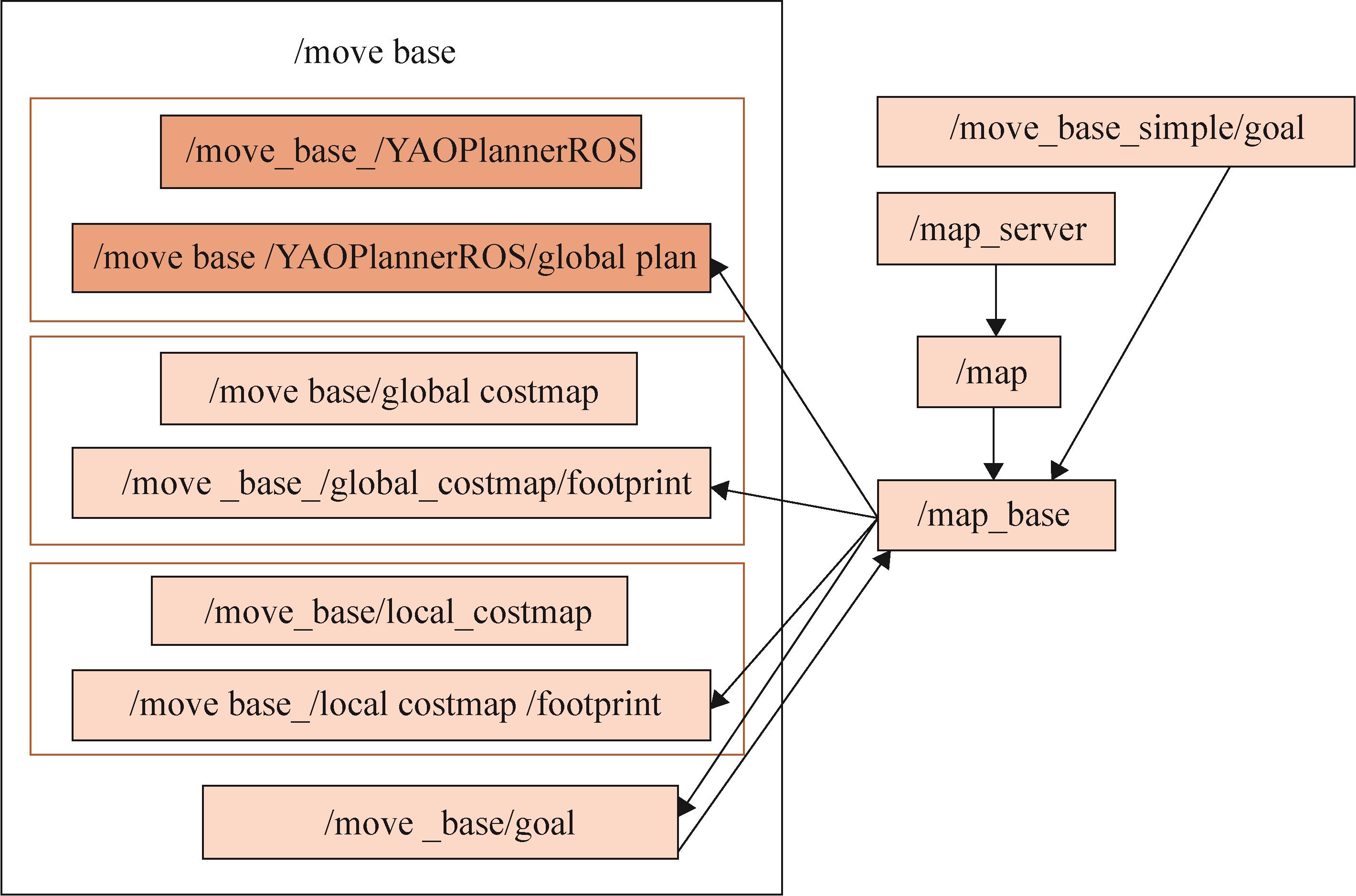

Fig. 20
Experimental environment


Fig. 21
Experimental environment Ⅰ


Fig. 22
Experimental environment Ⅱ


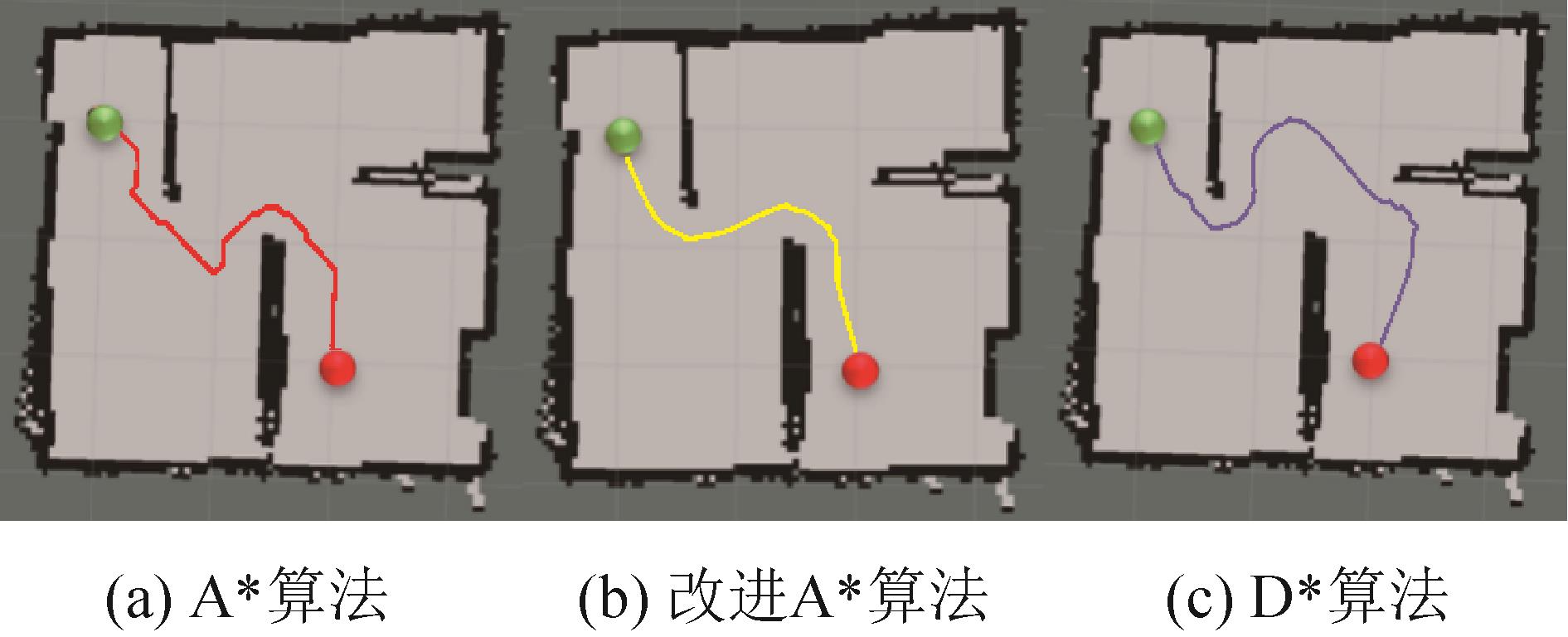
Fig. 23
Path planning effects in experimental environment Ⅰ
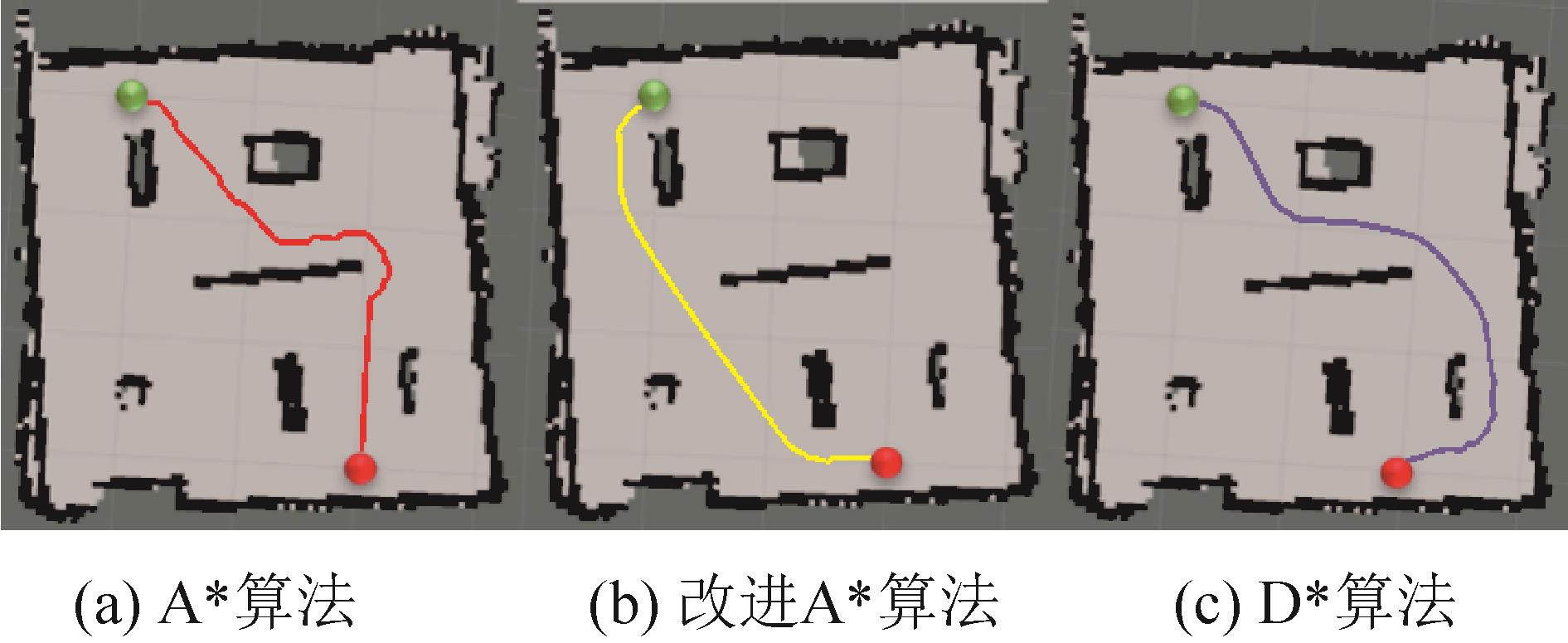
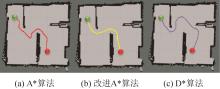
Fig. 24
Path planning effects of experimental environment Ⅱ
| 1 | Wu Lei, Huang Xiaodong, Cui Junguo, et al. Modified Adaptive Ant Colony Optimization Algorithm and Its Application for Solving Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2023, 215: 119410. |
| 2 | Fragapane Giuseppe, René de Koster, Sgarbossa Fabio, et al. Planning and Control of Autonomous Mobile Robots for Intralogistics: Literature Review and Research Agenda[J]. European Journal of Operational Research, 2021, 294(2): 405-426. |
| 3 | 张瑞, 周丽, 刘正洋. 融合RRT*与DWA算法的移动机器人动态路径规划[J]. 系统仿真学报, 2024, 36(4): 957-968. |
| Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach[J]. Journal of System Simulation, 2024, 36(4): 957-968. | |
| 4 | Jeddisaravi Kossar, Reza Javanmard Alitappeh, C A Pimenta Luciano, et al. Multi-objective Approach for Robot Motion Planning in Search Tasks[J]. Applied Intelligence, 2016, 45(2): 305-321. |
| 5 | Luo Qiang, Wang Haibao, Zheng Yan, et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Neural Computing and Applications, 2020, 32(6): 1555-1566. |
| 6 | Wang Qi, Tang Chunlei. Deep Reinforcement Learning for Transportation Network Combinatorial Optimization: A Survey[J]. Knowledge-Based Systems, 2021, 233: 107526. |
| 7 | Qu Rong, Xu Ying, Castro J P, et al. Particle Swarm Optimization for the Steiner Tree in Graph and Delay-constrained Multicast Routing Problems[J]. Journal of Heuristics, 2013, 19(2): 317-342. |
| 8 | Huynh Thi Thanh Binh, Pham Dinh Thanh, Ta Bao Thang. New Approach to Solving the Clustered Shortest-path Tree Problem Based on Reducing the Search Space of Evolutionary Algorithm[J]. Knowledge-Based Systems, 2019, 180: 12-25. |
| 9 | Tang Gang, Tang Congqiang, Claramunt Christophe, et al. Geometric A-star Algorithm: An Improved A-star Algorithm for AGV Path Planning in a Port Environment[J]. IEEE Access, 2021, 9: 59196-59210. |
| 10 | Zhao Tao, Li Haodong, Songyi Dian. Multi-robot Path Planning Based on Improved Artificial Potential Field and Fuzzy Inference System[J]. Journal of Intelligent & Fuzzy Systems, 2020, 39(5): 7621-7637. |
| 11 | Li Changgeng, Huang Xia, Ding Jun, et al. Global Path Planning Based on a Bidirectional Alternating Search A* Algorithm for Mobile Robots[J]. Computers & Industrial Engineering, 2022, 168: 108123. |
| 12 | 赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910. |
| Zhao Xiao, Wang Zheng, Huang Chengkan, et al. Mobile Robot Path Planning Based on an Improved A* Algorithm[J]. Robot, 2018, 40(6): 903-910. | |
| 13 | Shang Erke, Dai Bin, Nie Yiming, et al. An Improved A-star Based Path Planning Algorithm for Autonomous Land Vehicles[J]. International Journal of Advanced Robotic Systems, 2020, 17(5): 1729881420962263. |
| 14 | Liu Haoxin, Zhang Yonghui. ASL-DWA: An Improved A-star Algorithm for Indoor Cleaning Robots[J]. IEEE Access, 2022, 10: 99498-99515. |
| 15 | 辛煜, 梁华为, 杜明博, 等. 一种可搜索无限个邻域的改进A*算法[J]. 机器人, 2014, 36(5): 627-633. |
| Xin Yu, Liang Huawei, Du Mingbo, et al. An Improved A* Algorithm for Searching Infinite Neighbourhoods[J]. Robot, 2014, 36(5): 627-633. | |
| 16 | Xie Lei, Xue Shuangfei, Zhang Jinfen, et al. A Path Planning Approach Based on Multi-direction A* Algorithm for Ships Navigating Within Wind Farm Waters[J]. Ocean Engineering, 2019, 184: 311-322. |
| 17 | 陈娇, 徐菱, 陈佳, 等. 改进A*和动态窗口法的移动机器人路径规划[J]. 计算机集成制造系统, 2022, 28(6): 1650-1658. |
| Chen Jiao, Xu Ling, Chen Jia, et al. Path Planning Based on Improved A* and Dynamic Window Approach for Mobile Robot[J]. Computer Integrated Manufacturing Systems, 2022, 28(6): 1650-1658. | |
| 18 | 封声飞, 雷琦, 吴文烈, 等. 自适应蚁群算法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(17): 35-43. |
| Feng Shengfei, Lei Qi, Wu Wenlie, et al. Mobile Robot Path Planning Based on Adaptive Ant Colony Algorithm[J]. Computer Engineering and Applications, 2019, 55(17): 35-43. | |
| 19 | 徐菱, 付文浩, 江文辉, 等. 基于16方向24邻域改进蚁群算法的移动机器人路径规划[J]. 控制与决策, 2021, 36(5): 1137-1146. |
| Xu Ling, Fu Wenhao, Jiang Wenhui, et al. Mobile Robots Path Planning Based on 16-directions 24-neighborhoods Improved Ant Colony Algorithm[J]. Robot, 2021, 36(5): 1137-1146. | |
| 20 | 王中玉, 曾国辉, 黄勃, 等. 改进A*算法的机器人全局最优路径规划[J]. 计算机应用, 2019, 39(9): 2517-2522. |
| Wang Zhongyu, Zeng Guohui, Huang Bo, et al. Global Optimal Path Planning for Robots with Improved A* Algorithm[J]. journal of Computer Applications, 2019, 39(9): 2517-2522. | |
| 21 | 王雅如, 姚得鑫, 刘增力, 等. 基于角度搜索的移动机器人路径规划方法[J]. 系统仿真学报, 2024, 36(7): 1643-1654. |
| Wang Yaru, Yao Dexin, Liu Zengli, et al. Path Planning for Mobile Robot Based on Angle Search[J]. Journal of System Simulation, 2024, 36(7): 1643-1654. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [15] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
