

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (11): 2616-2630.doi: 10.16182/j.issn1004731x.joss.23-0926
Previous Articles Next Articles
Lu Bin1,2, Wang Minghan1,2, Sun Yang1,2, Yang Zhenyu1,2
Received:2023-07-21
Revised:2023-09-12
Online:2024-11-13
Published:2024-11-19
Contact:
Wang Minghan
CLC Number:
Lu Bin, Wang Minghan, Sun Yang, Yang Zhenyu. Global-local Fusion for Efficient 3D Object Detection[J]. Journal of System Simulation, 2024, 36(11): 2616-2630.
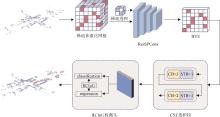
Fig. 1
Overall framework of ResCST
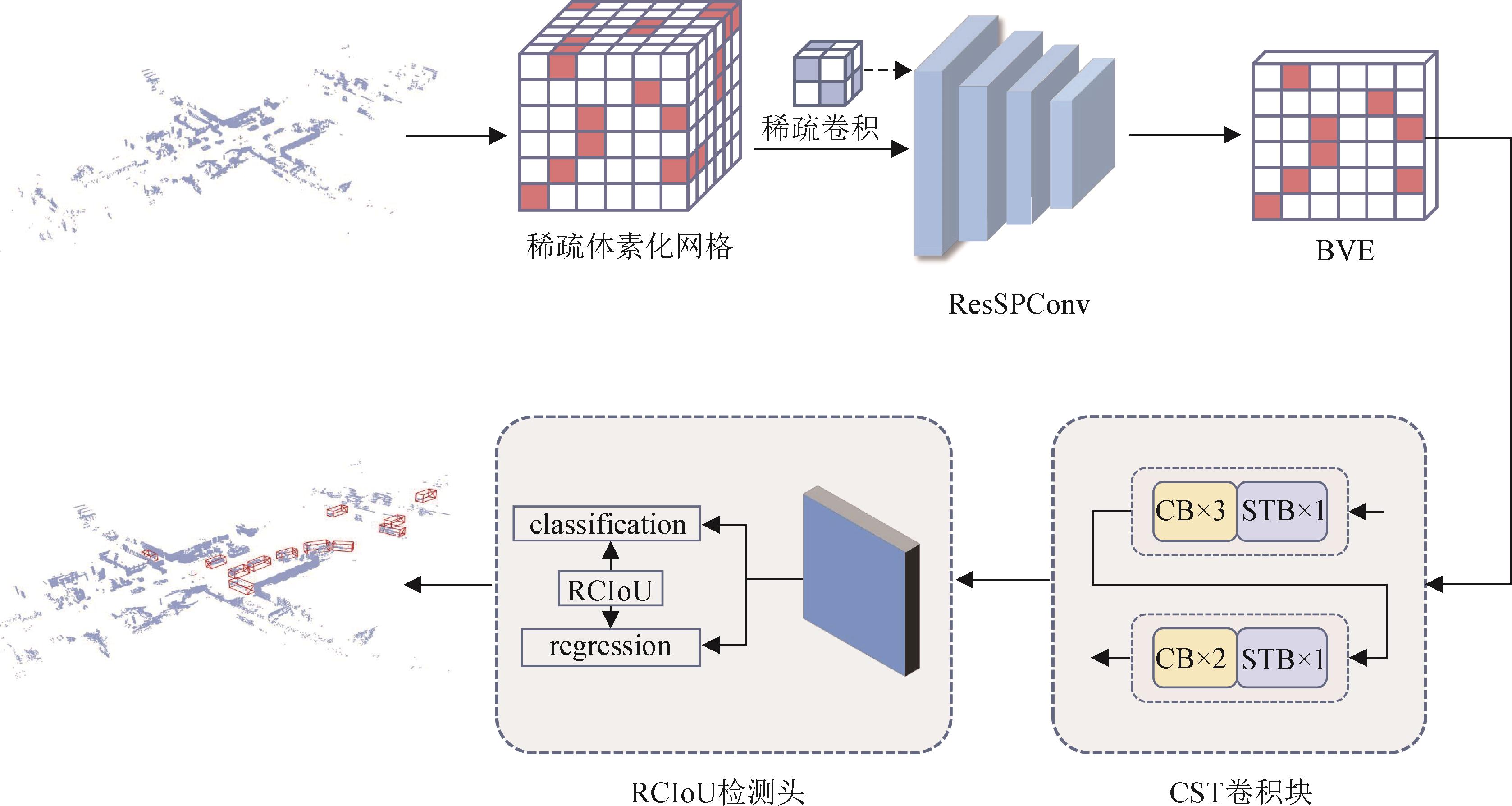

Fig. 2
Visualization of voxelization results
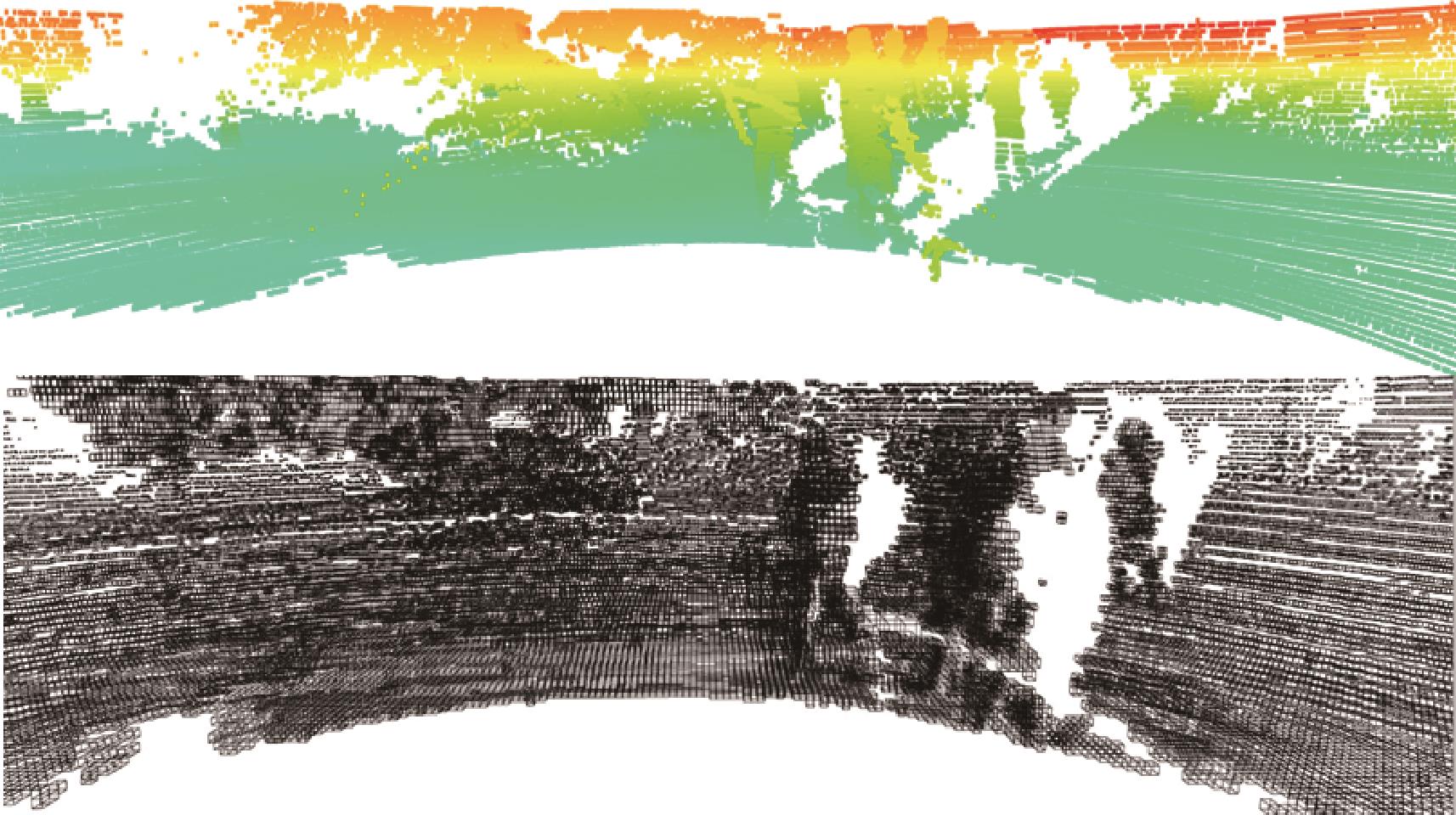

Fig. 3
Visualization of feature images before and after stack
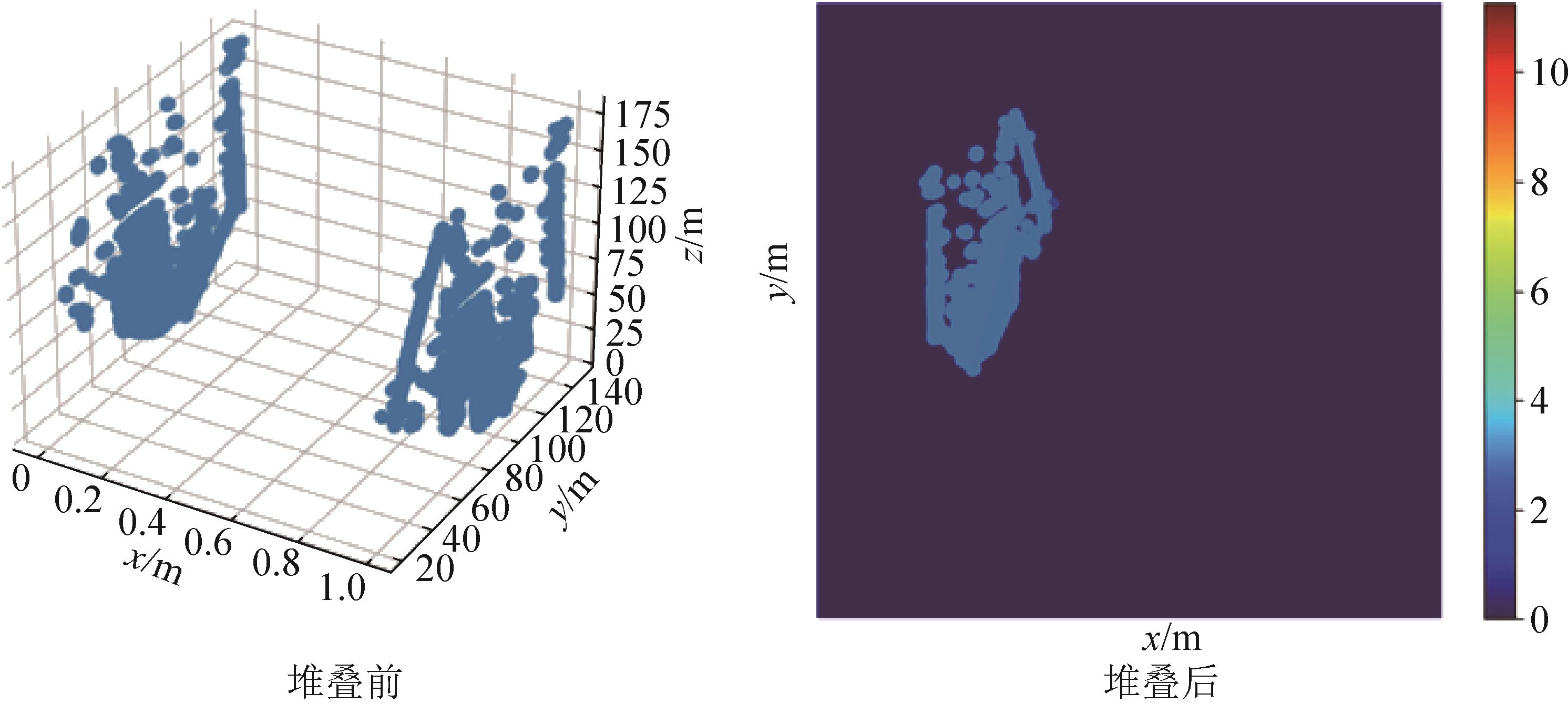
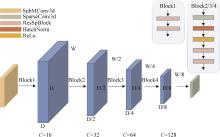
Fig. 4
ResSPConvNet architecture
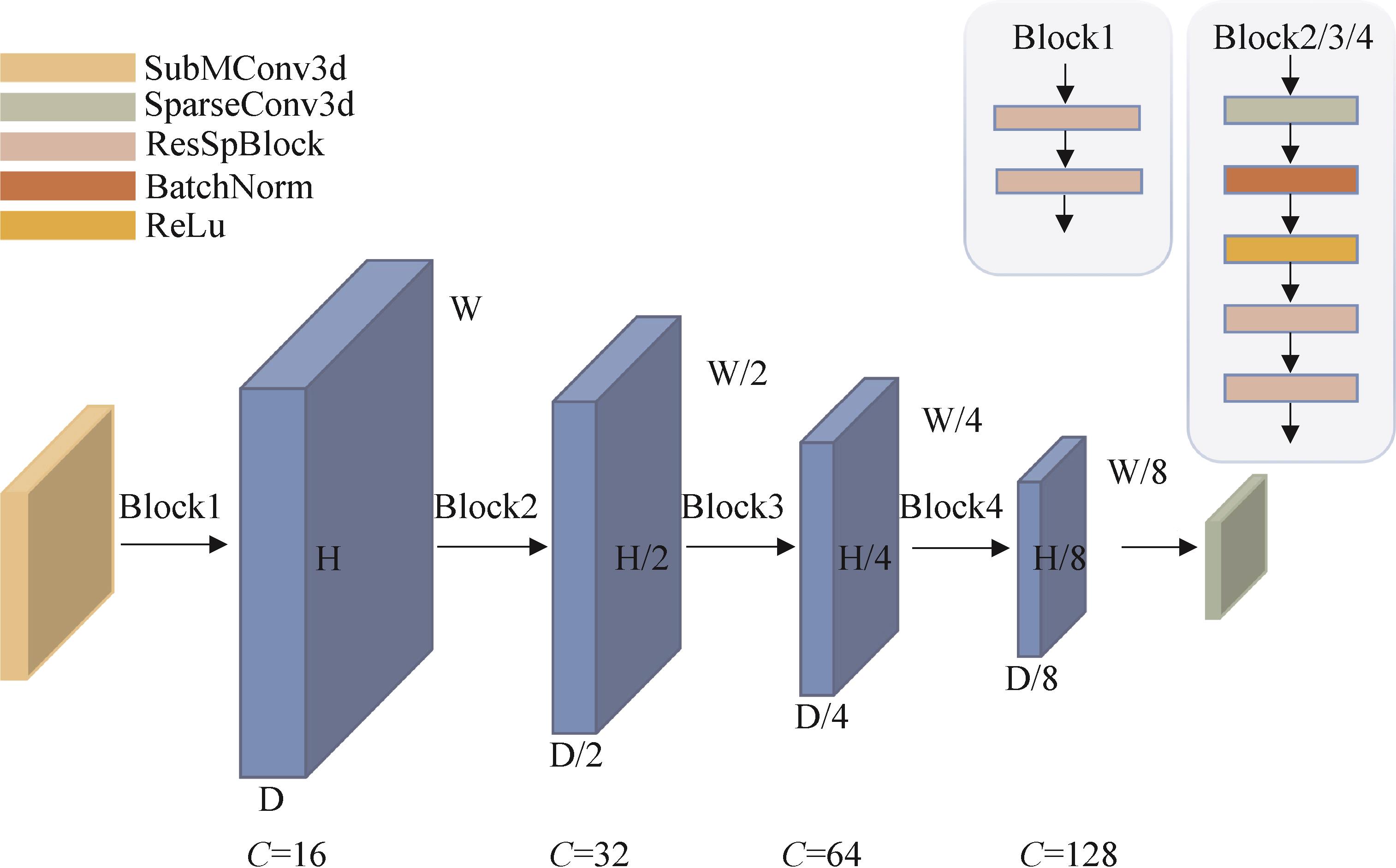
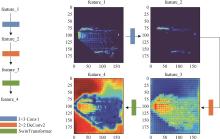
Fig. 5
CST network structure and features of self-attention
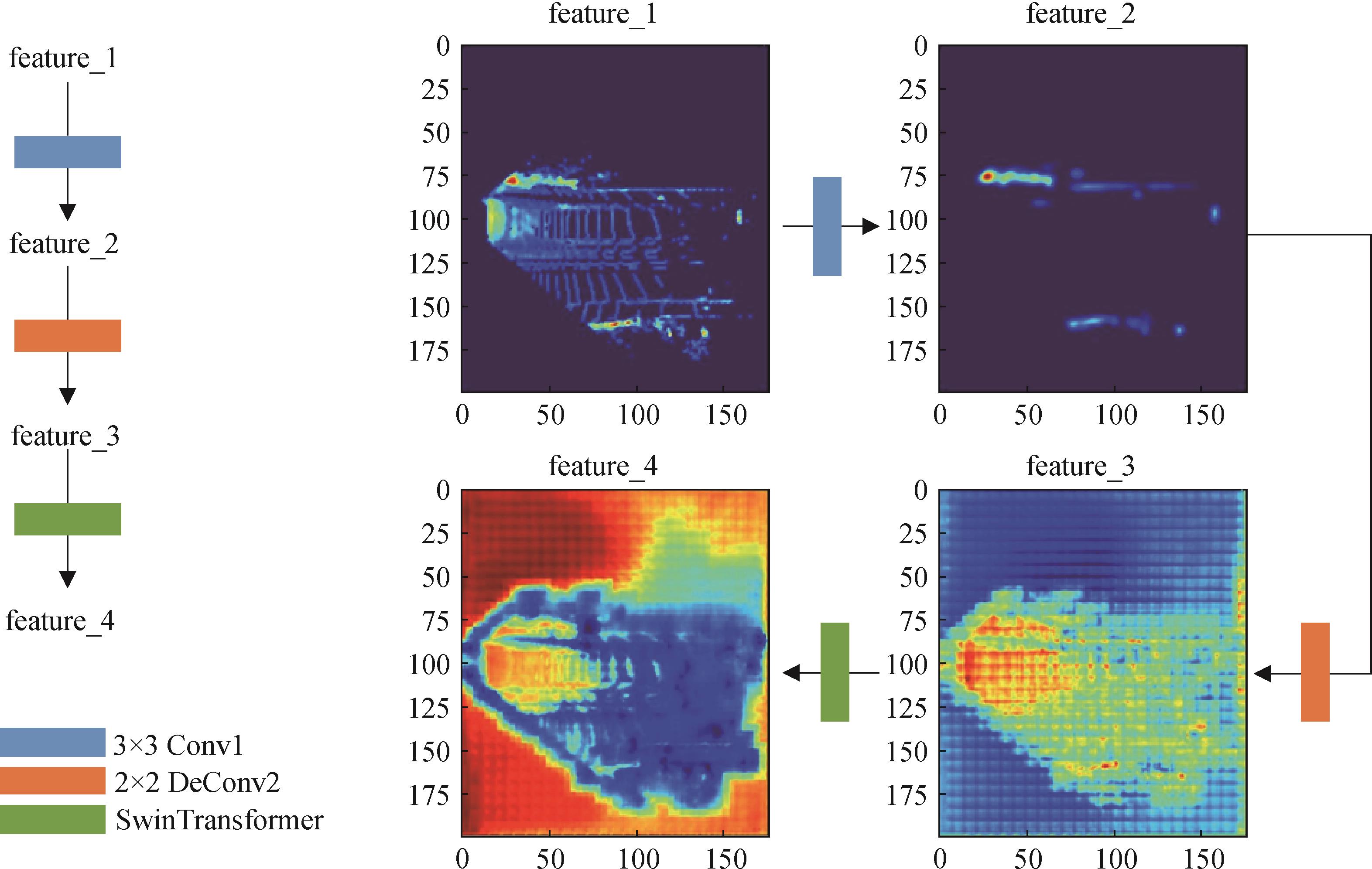
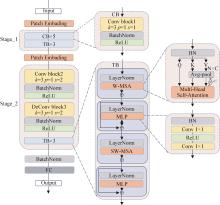
Fig. 6
CST architecture
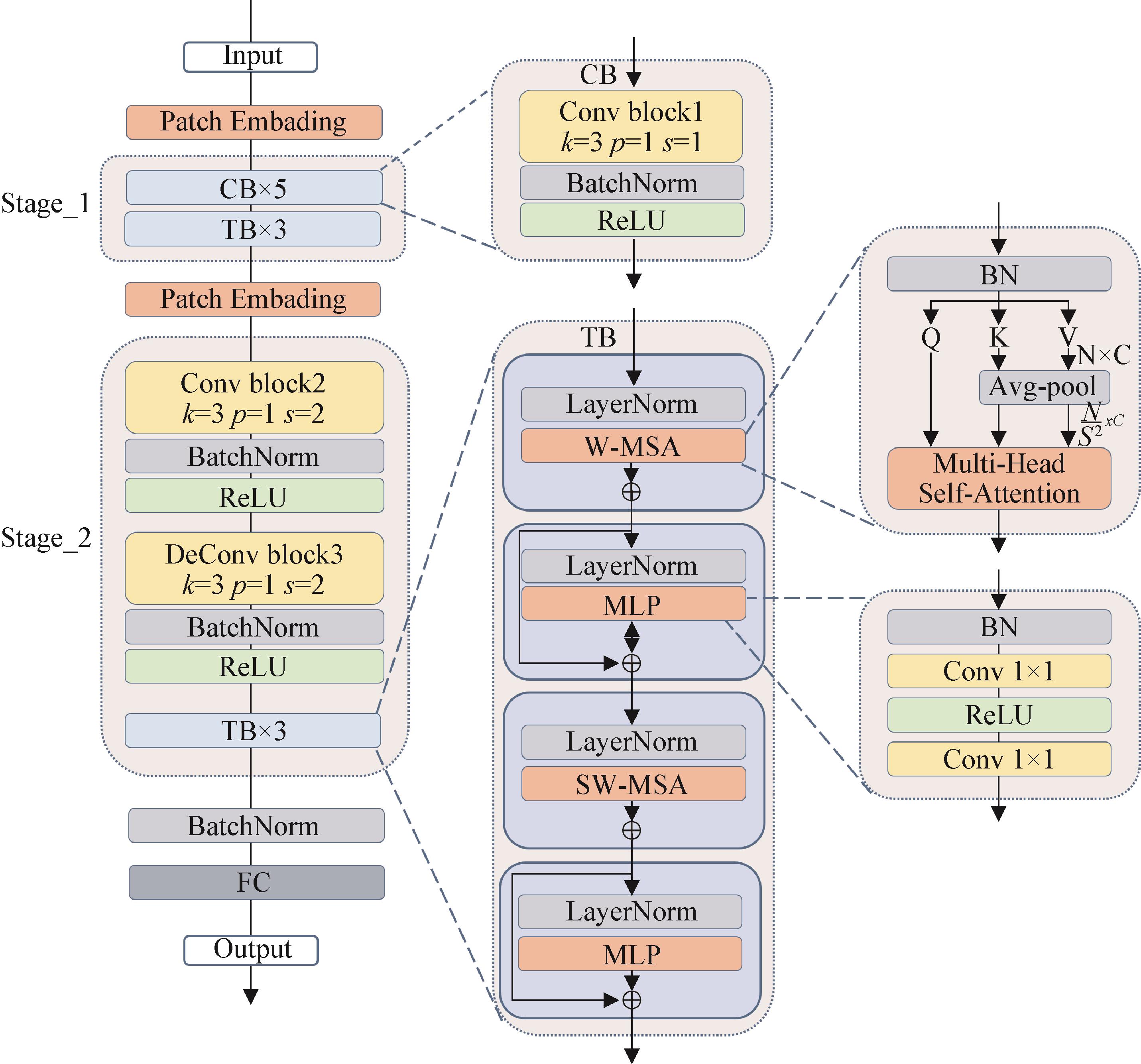
Table 1
Experimental environment and parameters
| 环境 | 参数 |
|---|---|
| GPU | NVIDIA RTX 3090 |
| 显存 | 24 GB |
| Python 版本 | 3.8 |
| 深度学习框架 | PyTorch 1.8.1 |
| CUDA 版本 | 11.1 |
| cuDNN版本 | 8.0 |
| SpConv | 2.3.3 |
Table 2
Comparison of AP3D between the proposed method and others (R40)
| Method | Stage | Car_AP3D(IoU=0.7)% | ||
|---|---|---|---|---|
| Easy | Moderate | Hard | ||
| PointRCNN[ | Two | 85.94 | 75.76 | 68.32 |
| Point-GNN[ | 88.33 | 79.47 | 72.29 | |
| VoTr-TSD[ | 89.90 | 82.09 | 79.14 | |
| CT3D[ | 87.83 | 81.77 | 77.16 | |
| BtcDet[ | 90.64 | 82.86 | 78.09 | |
| VoxelNet[ | One | 77.82 | 65.11 | 62.85 |
| SECOND[ | 83.34 | 73.66 | 66.20 | |
| PointPillar[ | 86.46 | 77.28 | 74.65 | |
| SE-SSD[ | 91.49 | 82.54 | 77.15 | |
| Ours | 91.21 | 82.97 | 80.28 | |
| Method | Stage | Cyclist_AP3D(IoU=0.7)% | ||
| Easy | Moderate | Hard | ||
| PointRCNN[ | Two | 92.51 | 71.89 | 67.48 |
| Point-GNN[ | ‒ | ‒ | ‒ | |
| VoTr-TSD[ | ‒ | ‒ | ‒ | |
| CT3D[ | 89.01 | 71.88 | 67.91 | |
| BtcDet[ | ‒ | ‒ | ‒ | |
| VoxelNet[ | One | ‒ | ‒ | ‒ |
| SECOND[ | 82.96 | 66.74 | 62.78 | |
| PointPillar[ | 81.58 | 62.94 | 58.98 | |
| SE-SSD[ | ‒ | ‒ | ‒ | |
| Ours | 87.81 | 69.94 | 65.33 | |
Table 3
Comparison of AP3D of cars between the proposed method and other one-stage methods (R11)
| Method | FPS | Car_AP3D(IoU=0.7)% | ||
|---|---|---|---|---|
| Easy | Moderate | Hard | ||
| VoxelNet[ | 4.4 | 81.97 | 65.46 | 62.85 |
| SECOND[ | 20 | 87.43 | 76.48 | 69.10 |
| PointPillar[ | 42 | 86.62 | 76.06 | 68.91 |
| SE-SSD[ | 25 | ‒ | 81.71 | ‒ |
| Ours | 25 | 89.17 | 78.95 | 78.04 |

Fig. 7
Visualization results
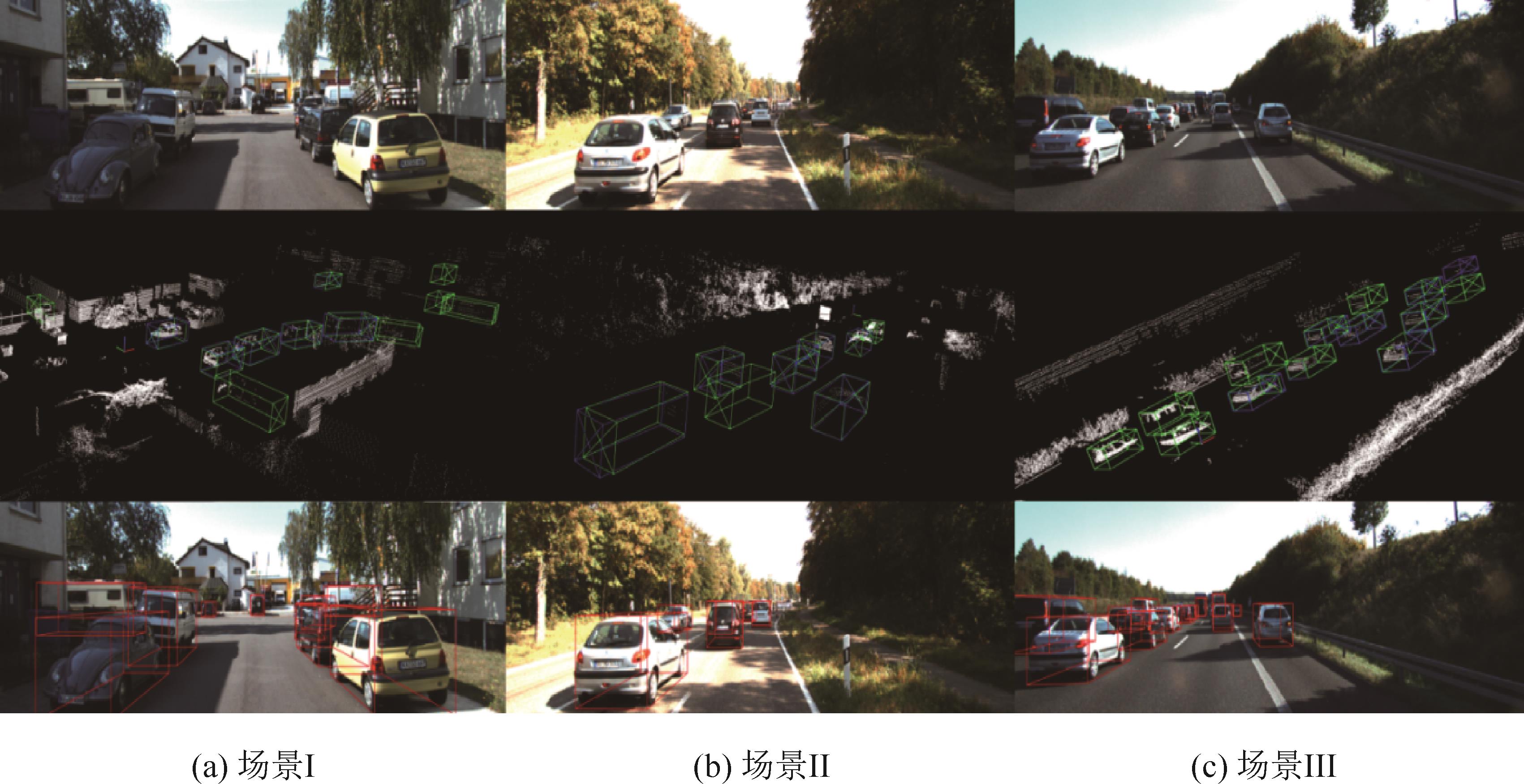
Table 4
AP3D in ablation experiments
| ResSPConvNet | CSTNet | RCIoU | Car_AP3D% | ||
|---|---|---|---|---|---|
| Easy | Moderate | Hard | |||
| × | × | × | 87.43 | 76.48 | 69.10 |
| √ | × | × | 87.90 | 77.61 | 76.48 |
| × | √ | × | 87.77 | 77.42 | 76.03 |
| × | × | √ | 88.66 | 78.59 | 77.72 |
| √ | √ | √ | 89.87 | 79.10 | 78.99 |
Table 5
Comparison test of convolution operator performance
| 卷积算子 | Car_AP3D% | 参数设置 | ||
|---|---|---|---|---|
| Easy | Moderate | Hard | ||
| 标准卷积 | 89.87 | 79.10 | 78.99 | ‒ |
| 空洞卷积 | 89.26 | 78.97 | 78.26 | dilation rate=2 |
| 分组卷积 | 88.77 | 77.42 | 77.03 | group size = 2 |
| 1 | Qi R, Su Hao, Mo Kaichun, et al. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2017: 77-85. |
| 2 | Qi R, Yi Li, Su Hao, et al. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates, Inc., 2017: 5105-5114. |
| 3 | Lang A H, Vora S, Caesar H, et al. PointPillars: Fast Encoders for Object Detection From Point Clouds[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2019: 12689-12697. |
| 4 | Zhou Sifan, Tian Zhi, Chu Xiangxiang, et al. FastPillars: A Deployment-friendly Pillar-based 3D Detector[EB/OL]. (2023-02-07) [2023-03-08]. . |
| 5 | Shi Guangsheng, Li Ruifeng, Ma Chao. PillarNet: Real-time and High-performance Pillar-based 3D Object Detection[EB/OL]. (2022-08-26) [2023-03-26]. . |
| 6 | Yin Tianwei, Zhou Xingyi, Krähenbühl Philipp. Center-based 3D Object Detection and Tracking[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021: 11779-11788. |
| 7 | Zhou Yin, Tuzel O. VoxelNet: End-to-end Learning for Point Cloud Based 3D Object Detection[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4490-4499. |
| 8 | Yan Yan, Mao Yuxing, Li Bo. SECOND: Sparsely Embedded Convolutional Detection[J]. Sensors, 2018, 18(10): 3337. |
| 9 | Vaswani A, Shazeer N, Parmar N, et al. Attention Is All You Need[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates, Inc., 2017: 6000-6010. |
| 10 | Li Jiashi, Xia Xin, Li Wei, et al. Next-ViT: Next Generation Vision Transformer for Efficient Deployment in Realistic Industrial Scenarios[EB/OL]. (2022-08-16) [2023-04-11]. . |
| 11 | Li Jiale, Luo Shujie, Zhu Ziqi, et al. 3D IoU-net: IoU Guided 3D Object Detector for Point Clouds[EB/OL]. (2020-04-10) [2023-04-05]. . |
| 12 | Ren Shaoqing, He Kaiming, Girshick R, et al. Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks[C]//Proceedings of the 28th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2015: 91-99. |
| 13 | Li Xiang, Wang Wenhai, Wu Lijun, et al. Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection[C]//Proceedings of the 34th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates, Inc., 2020: 21002-21012. |
| 14 | Zheng Zhaohui, Wang Ping, Liu Wei, et al. Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 12993-13000. |
| 15 | Zhou Dingfu, Fang Jin, Song Xibin, et al. IoU Loss for 2D/3D Object Detection[C]//2019 International Conference on 3D Vision (3DV). Piscataway: IEEE, 2019: 85-94. |
| 16 | Zheng Wu, Tang Weiliang, Jiang Li, et al. SE-SSD: Self-ensembling Single-stage Object Detector from Point Cloud[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021: 14489-14498. |
| 17 | Sheng Hualian, Cai Sijia, Zhao Na, et al. Rethinking IoU-based Optimization for Single-stage 3D Object Detection[C]//Computer Vision – ECCV 2022. Cham: Springer Nature Switzerland, 2022: 544-561. |
| 18 | Shi Shaoshuai, Wang Xiaogang, Li Hongsheng. PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2019: 770-779. |
| 19 | Yang Zetong, Sun Yanan, Liu Shu, et al. 3DSSD: Point-based 3D Single Stage Object Detector[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020: 11037-11045. |
| 20 | Pan Xuran, Xia Zhuofan, Song Shiji, et al. 3D Object Detection with Pointformer[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021: 7459-7468. |
| 21 | Shi Weijing, Rajkumar R. Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020: 1708-1716. |
| 22 | Ge Runzhou, Ding Zhuangzhuang, Hu Yihan, et al. AFDet: Anchor Free One Stage 3D Object Detection[EB/OL]. (2020-06-30) [2023-04-26]. . |
| 23 | Hu Yihan, Ding Zhuangzhuang, Ge Runzhou, et al. AFDetV2: Rethinking the Necessity of the Second Stage for Object Detection from Point Clouds[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(1): 969-979. |
| 24 | Zheng Wu, Tang Weiliang, Chen Sijin, et al. CIA-SSD: Confident IoU-aware Single-stage Object Detector from Point Cloud[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3555-3562. |
| 25 | Fan Lue, Pang Ziqi, Zhang Tianyuan, et al. Embracing Single Stride 3D Object Detector with Sparse Transformer[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 8448-8458. |
| 26 | Zou Jiayu, Tian Kun, Zhu Zheng, et al. DiffBEV: Conditional Diffusion Model for Bird's Eye View Perception[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2024, 38(7), 7846-7854. |
| 27 | Li Bo, Zhang Tianlei, Xia Tian. Vehicle Detection from 3D Lidar Using Fully Convolutional Network[EB/OL]. (2016-08-29) [2023-05-31]. . |
| 28 | Beltrán Jorge, Guindel Carlos, Francisco Miguel Moreno, et al. BirdNet: A 3D Object Detection Framework from LiDAR Information[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Piscataway: IEEE, 2018: 3517-3523. |
| 29 | Wang Tai, Zhu Xinge, Lin Dahua. Reconfigurable Voxels: A New Representation for LiDAR-based Point Clouds[C]//Proceedings of the 2020 Conference on Robot Learning. Chia Laguna Resort: PMLR, 2021: 286-295. |
| 30 | Wu Hai, Wen Chenglu, Li Wei, et al. Transformation-equivariant 3D Object Detection for Autonomous Driving[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2023, 37(3): 2795-2802. |
| 31 | Wu Xiaopei, Peng Liang, Yang Honghui, et al. Sparse Fuse Dense: Towards High Quality 3D Detection with Depth Completion[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2023: 5408-5417. |
| 32 | Dosovitskiy A, Beyer L, Kolesnikov A, et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale[EB/OL]. (2021-06-03) [2023-05-28]. . |
| 33 | Zhou Yin, Sun Pei, Zhang Yu, et al. End-to-end Multi-view Fusion for 3D Object Detection in LiDAR Point Clouds[C]//Proceedings of the Conference on Robot Learning. Chia Laguna Resort: PMLR, 2020: 923-932. |
| 34 | Liu Ze, Lin Yutong, Cao Yue, et al. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021: 9992-10002. |
| 35 | Zhao Hengshuang, Jiang Li, Jia Jiaya, et al. Point Transformer[EB/OL]. (2021-09-26) [2023-05-13]. . |
| 36 | Mao Jiageng, Xue Yujing, Niu Minzhe, et al. Voxel Transformer for 3D Object Detection[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021: 3144-3153. |
| 37 | He Chenhang, Li Ruihuang, Li Shuai, et al. Voxel Set Transformer: A Set-to-set Approach to 3D Object Detection from Point Clouds[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 8407-8417. |
| 38 | Chen Xuanyao, Liu Zhijian, Tang Haotian, et al. SparseViT: Revisiting Activation Sparsity for Efficient High-resolution Vision Transformer[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2023: 2061-2070. |
| 39 | He Kaiming, Zhang Xiangyu, Ren Shaoqing, et al. Deep Residual Learning for Image Recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2016: 770-778. |
| 40 | Xia Xin, Li Jiashi, Wu Jie, et al. TRT-ViT: TensorRT-oriented Vision Transformer[EB/OL]. (2022-07-12) [2023-06-01]. . |
| 41 | Li Yanyu, Yuan Geng, Wen Yang, et al. EfficientFormer: Vision Transformers at MobileNet Speed[C]//Advances in Neural Information Processing Systems. Red Hook: Curran Associates, Inc., 2022: 12934-12949. |
| 42 | Li Xiang, Wang Wenhai, Hu Xiaolin, et al. Generalized Focal Loss V2: Learning Reliable Localization Quality Estimation for Dense Object Detection[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021: 11627-11636. |
| 43 | Geiger Andreas, Lenz Philip, Urtasun R. Are We Ready for Autonomous Driving? The KITTI Vision Benchmark Suite[C]//Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2012: 3354-3361. |
| 44 | Sheng Hualian, Cai Sijia, Liu Yuan, et al. Improving 3D Object Detection with Channel-wise Transformer[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021: 2723-2732. |
| 45 | Xu Qiangeng, Zhong Yiqi, Neumann U. Behind the Curtain: Learning Occluded Shapes for 3D Object Detection[C]//Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(3), 2893-2901. |
| [1] | Shi Min, Guo Shisheng, Wang Suqin, Li Zhaoxin, Zhu Dengming. Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors [J]. Journal of System Simulation, 2026, 38(5): 1290-1302. |
| [2] | Jiang Yanji, Xiao Xingyi, Dong Hao, Yu Miao, Huang Jinshan, Liu Daqian, Fei Bowen. Detection Method for 3D Lanes Based on Graph Relationship Optimization Integrating Point and Lane Features [J]. Journal of System Simulation, 2026, 38(5): 1303-1319. |
| [3] | Wan Fei, Yin Yong. Large-scale Scene Registration Technology Based on 3D Gaussian Splatting Fusing GPS Prior Information [J]. Journal of System Simulation, 2026, 38(3): 563-571. |
| [4] | Chen Yanjun, Zhou Min, Zha Meng, Zhang Meizhou. Research and Analysis of Algorithm for Detecting Surface Defects on Automotive Wheel Hubs Based on CCL-YOLOv8 [J]. Journal of System Simulation, 2026, 38(3): 670-686. |
| [5] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [6] | Zhu He, Zhou Feng, Zhang Qi, Zhu Mengxiao, Dai Ju. PL-Mamba: A 3D Point Cloud Semantic Segmentation Network Based on Bimodal Fusion [J]. Journal of System Simulation, 2026, 38(1): 73-83. |
| [7] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [8] | Jiang Yanji, Zhang Yingyang, Dong Hao, Zhang Xiaoguang, Wang Meihui. Lane Detection in Dark Light Based on Instance Association [J]. Journal of System Simulation, 2025, 37(9): 2188-2199. |
| [9] | Lu Bin, Yang Xuan, Yang Zhenyu, Gao Xiaotian. Adaptive Sampling and Ghost Multi-scale Fusion for Lightweight Weld Defect Detection [J]. Journal of System Simulation, 2025, 37(8): 1978-1990. |
| [10] | Li Mingyu, Lin Jiaquan. Lightweight Driver Face Object Detection Algorithm Based on YOLOv8-DF [J]. Journal of System Simulation, 2025, 37(8): 2103-2114. |
| [11] | Liu Zilong, Zhang Lei. Detection of Small Apple Targets Based on Improved YOLOv5 in Natural Environments [J]. Journal of System Simulation, 2025, 37(8): 2124-2138. |
| [12] | Wu Jianping, Li Guanzhou, Zhao Shuai, Huang Ling. Intelligent Transition of Automotive Industry Driven by Autonomous Driving Simulation Testing Technology [J]. Journal of System Simulation, 2025, 37(7): 1649-1664. |
| [13] | Yang Lu, Pei Junying. Aerial Target Detection Algorithm Fused with Multi-scale Features [J]. Journal of System Simulation, 2025, 37(6): 1486-1498. |
| [14] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [15] | Wu Guohua, Zeng Jiaheng, Wang Dezhi, Zheng Long, Zou Wei. A Quadrotor Trajectory Tracking Control Method Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(5): 1169-1187. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
