

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2032-2042.doi: 10.16182/j.issn1004731x.joss.23-0528
Previous Articles Next Articles
Yao Wanye, Pang Zewei, Sun Peijie, Wang Zhu
Received:2023-05-07
Revised:2023-07-20
Online:2024-09-15
Published:2024-09-30
Contact:
Wang Zhu
CLC Number:
Yao Wanye, Pang Zewei, Sun Peijie, Wang Zhu. Research on ORB-SLAM Algorithm Based on Windowed Matching Estimation[J]. Journal of System Simulation, 2024, 36(9): 2032-2042.
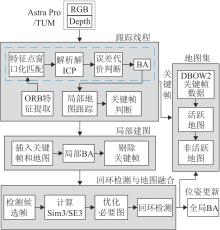
Fig. 1
System structure diagram
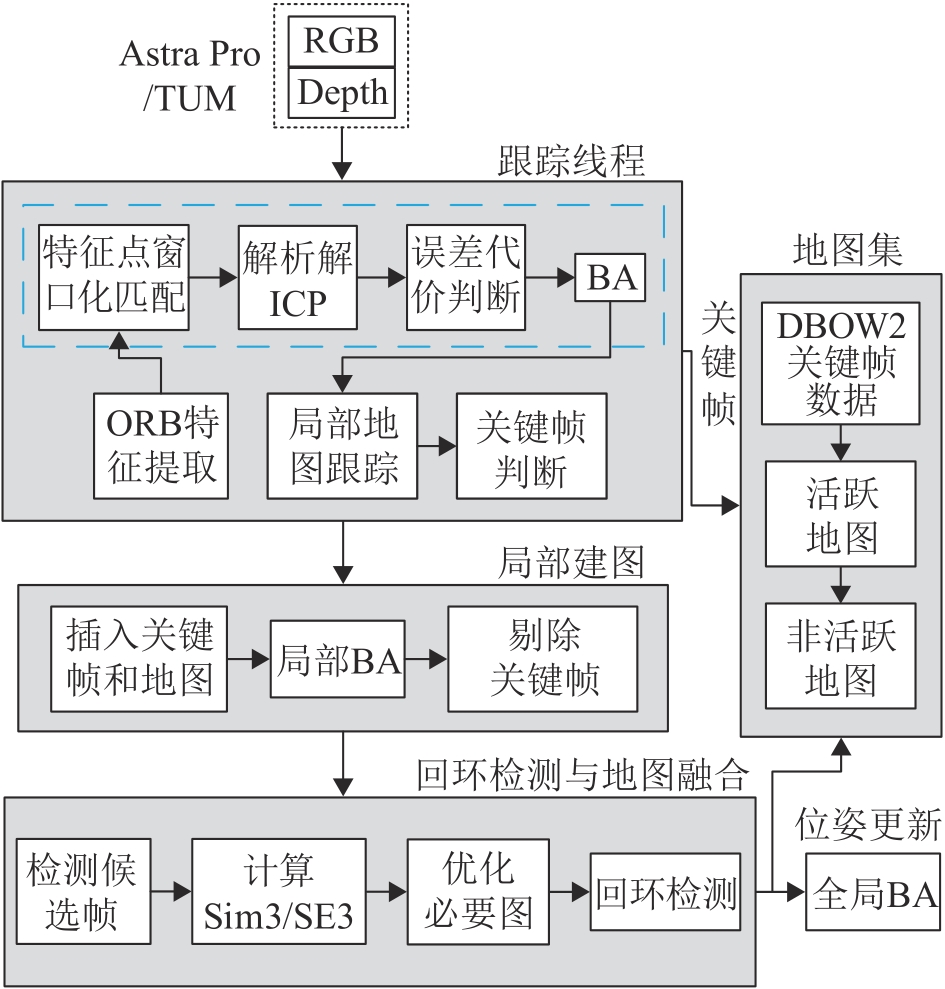
Fig. 2
Flow chart of camera pose solving

Fig. 3
Feature point matching
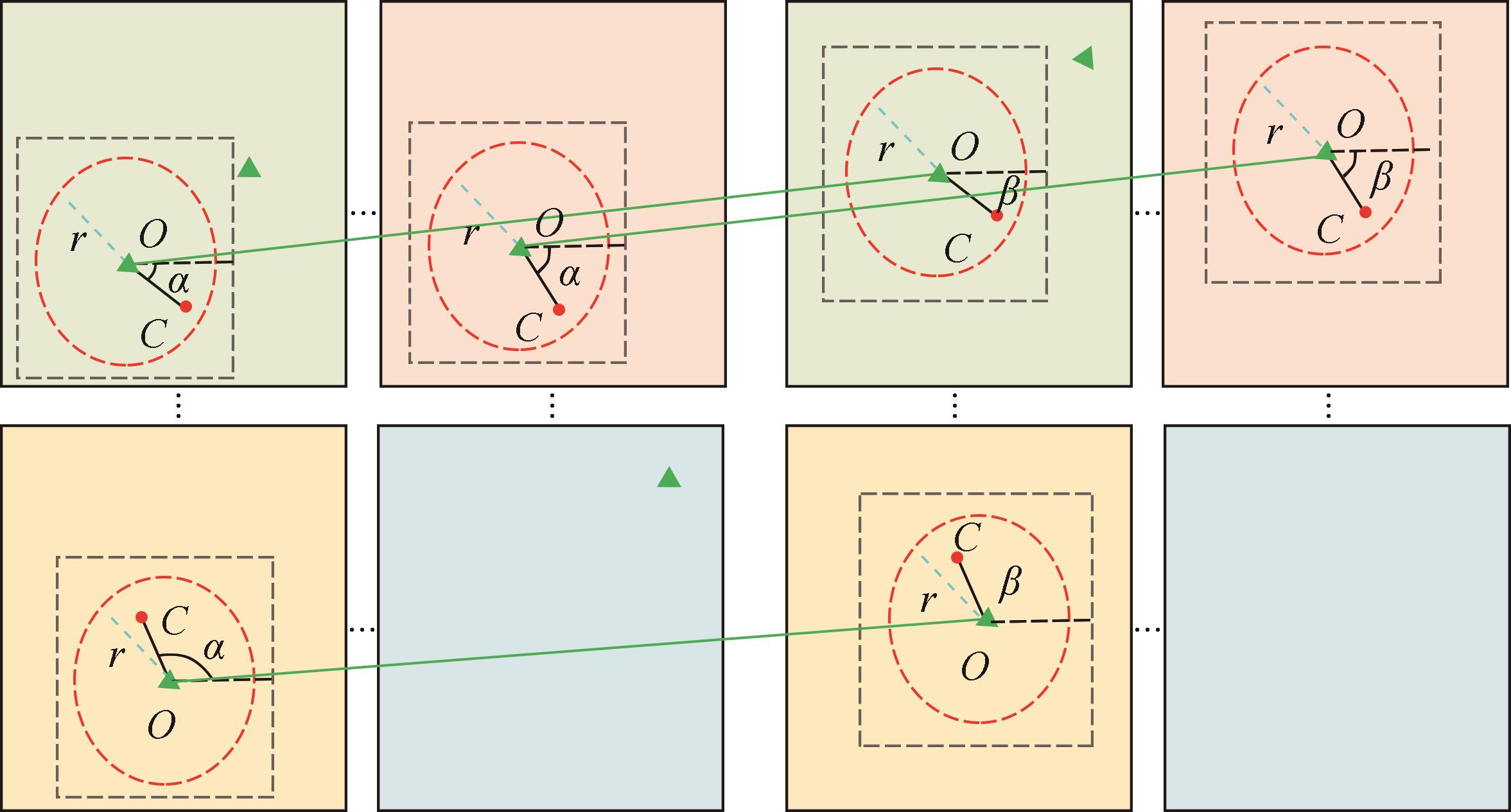
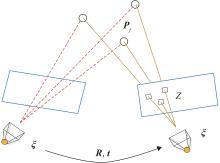
Fig. 4
BA optimization
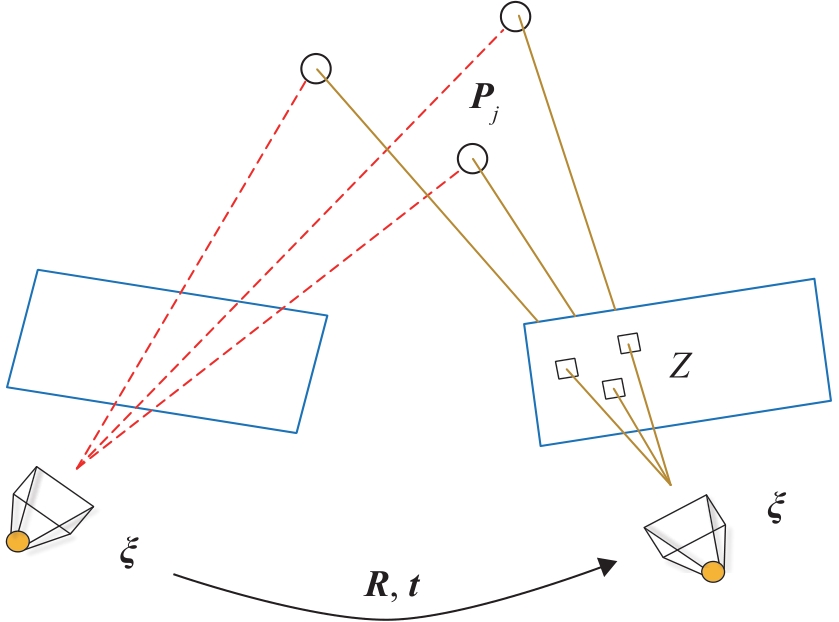

Fig. 5
Comparison of different feature matching algorithms
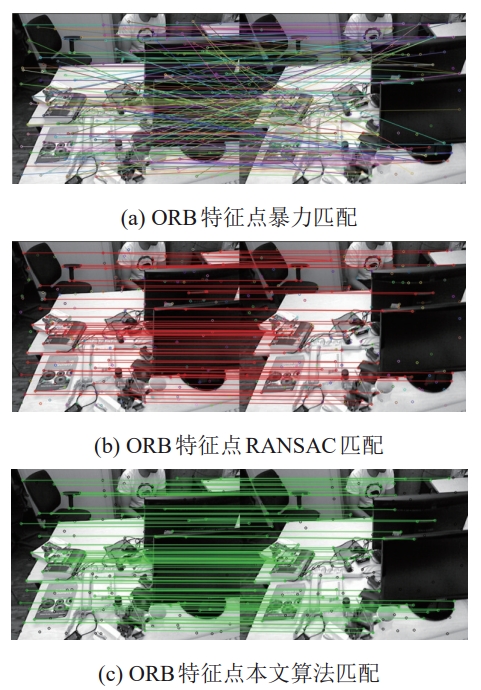
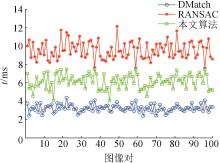
Fig. 6
Comparison results of feature matching time
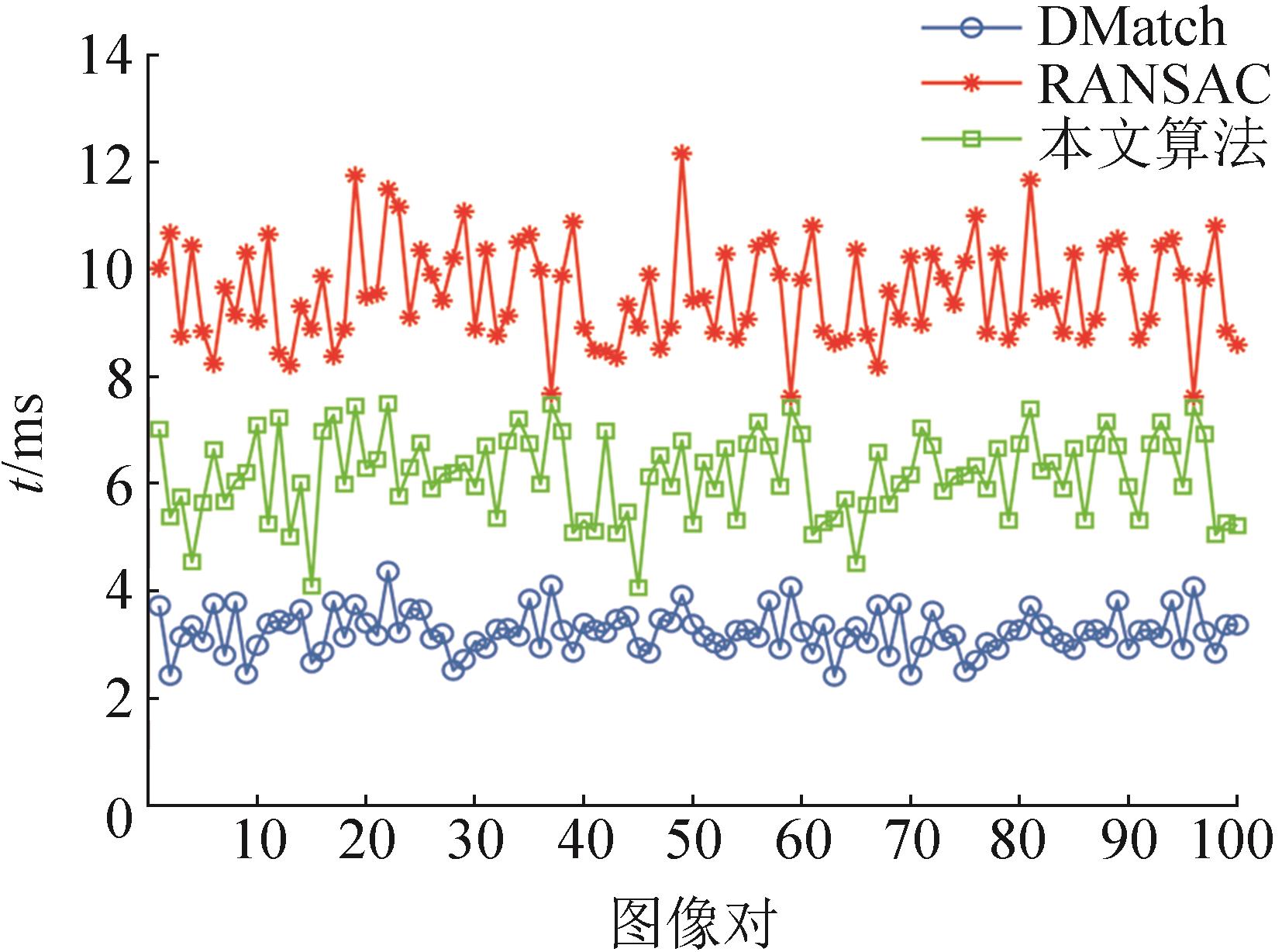
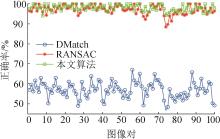
Fig. 7
Comparison results of feature matching accuracy
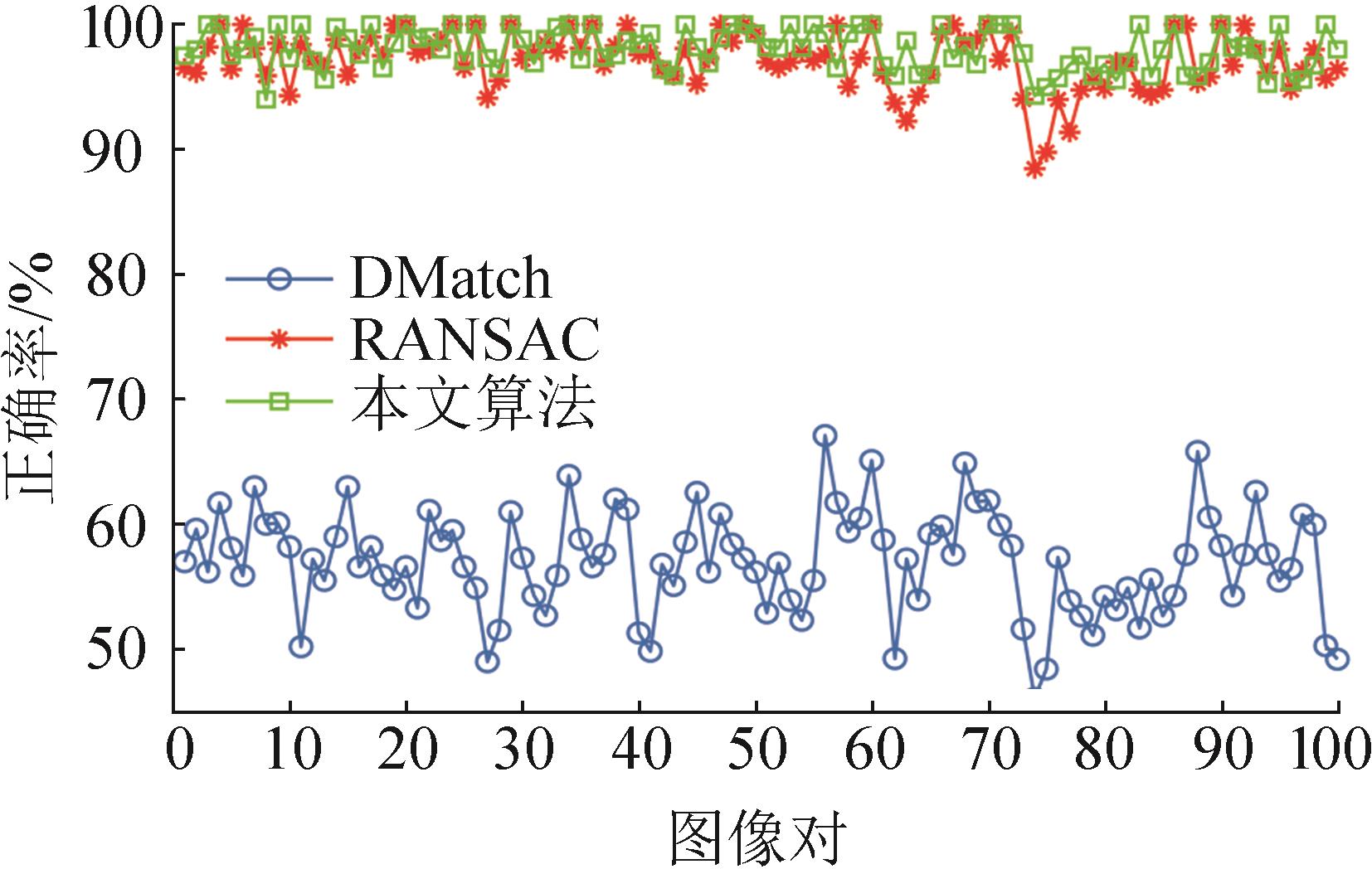

Fig. 8
Comparison results of absolute trajectory error using different algorithms
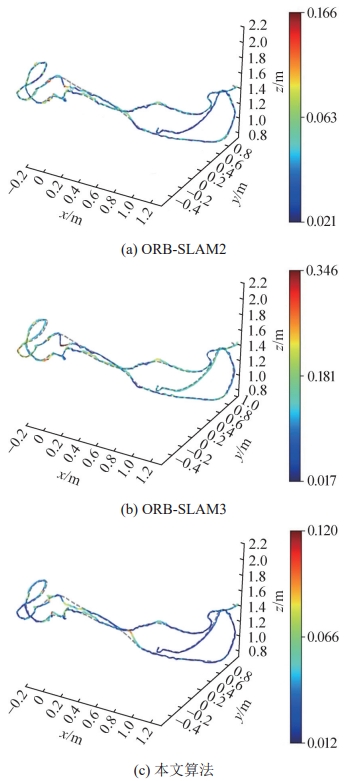
Table 1
Comparison results of camera trajectory error m
| 数据集 | 算法 | 最大 误差 | 最小 误差 | 均方根误差 |
|---|---|---|---|---|
| fr1_xyz | ORB-SLAM2 | 0.077 | 0.015 | 0.042 |
| ORB-SLAM3 | 0.096 | 0.023 | 0.054 | |
| 本文算法 | 0.065 | 0.006 | 0.032 | |
| fr1_desk | ORB-SLAM2 | 0.166 | 0.021 | 0.049 |
| ORB-SLAM3 | 0.346 | 0.016 | 0.060 | |
| 本文算法 | 0.119 | 0.011 | 0.038 | |
| fr1_desk2 | ORB-SLAM2 | 0.131 | 0.016 | 0.066 |
| ORB-SLAM3 | 0.123 | 0.028 | 0.065 | |
| 本文算法 | 0.133 | 0.010 | 0.051 | |
| fr1_360 | ORB-SLAM2 | 0.805 | 0.223 | 0.489 |
| ORB-SLAM3 | 0.646 | 0.235 | 0.350 | |
| 本文算法 | 0.442 | 0.122 | 0.223 | |
| office0 | ORB-SLAM2 | 0.080 | 0.017 | 0.044 |
| ORB-SLAM3 | 0.084 | 0.021 | 0.051 | |
| 本文算法 | 0.059 | 0.010 | 0.035 | |
| office1 | ORB-SLAM2 | 0.127 | 0.019 | 0.073 |
| ORB-SLAM3 | 0.121 | 0.025 | 0.075 | |
| 本文算法 | 0.109 | 0.012 | 0.066 | |
| living1 | ORB-SLAM2 | 0.205 | 0.063 | 0.110 |
| ORB-SLAM3 | 0.191 | 0.065 | 0.103 | |
| 本文算法 | 0.146 | 0.033 | 0.081 | |
| living2 | ORB-SLAM2 | 0.042 | 0.011 | 0.017 |
| ORB-SLAM3 | 0.053 | 0.016 | 0.019 | |
| 本文算法 | 0.039 | 0.010 | 0.015 |
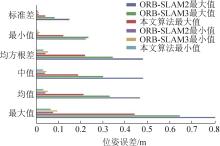
Fig. 9
Comparison results of camera pose error

Fig. 10
LEO mobile robot

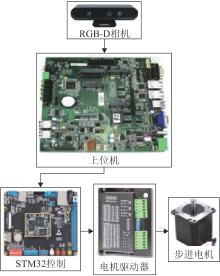
Fig. 11
Robot hardware architecture
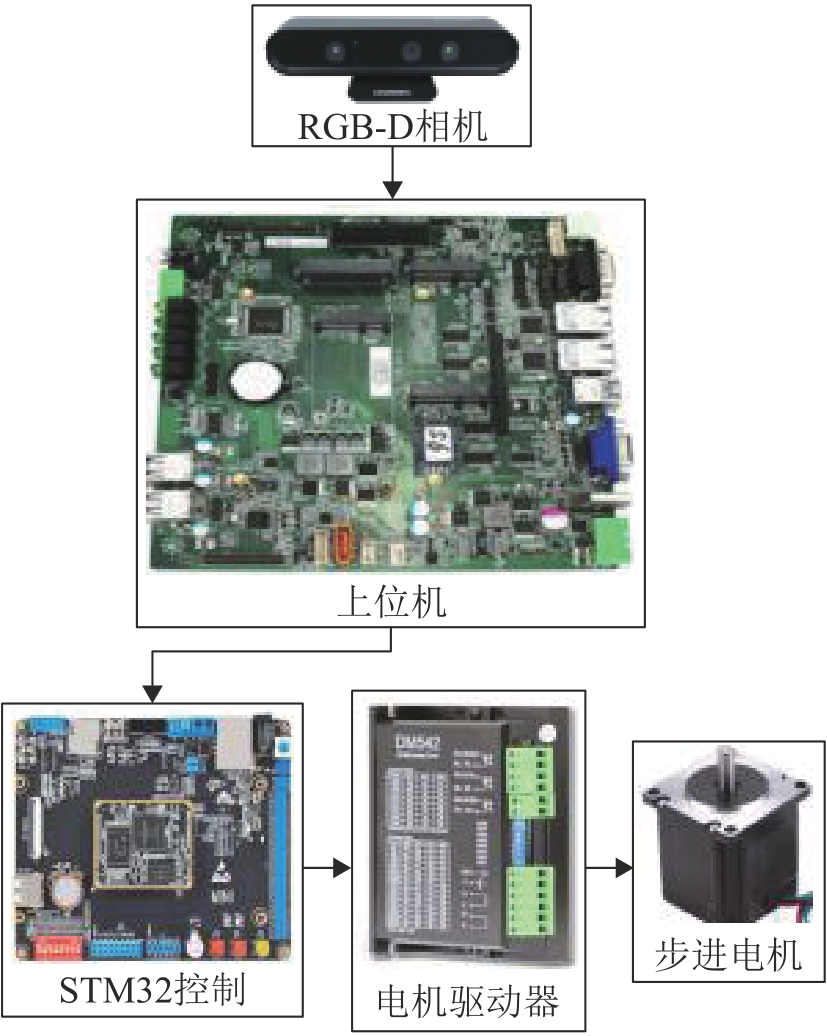

Fig. 12
Experimental scenario

Fig. 13
1Absolute trajectory error of LEO mobile robot camera
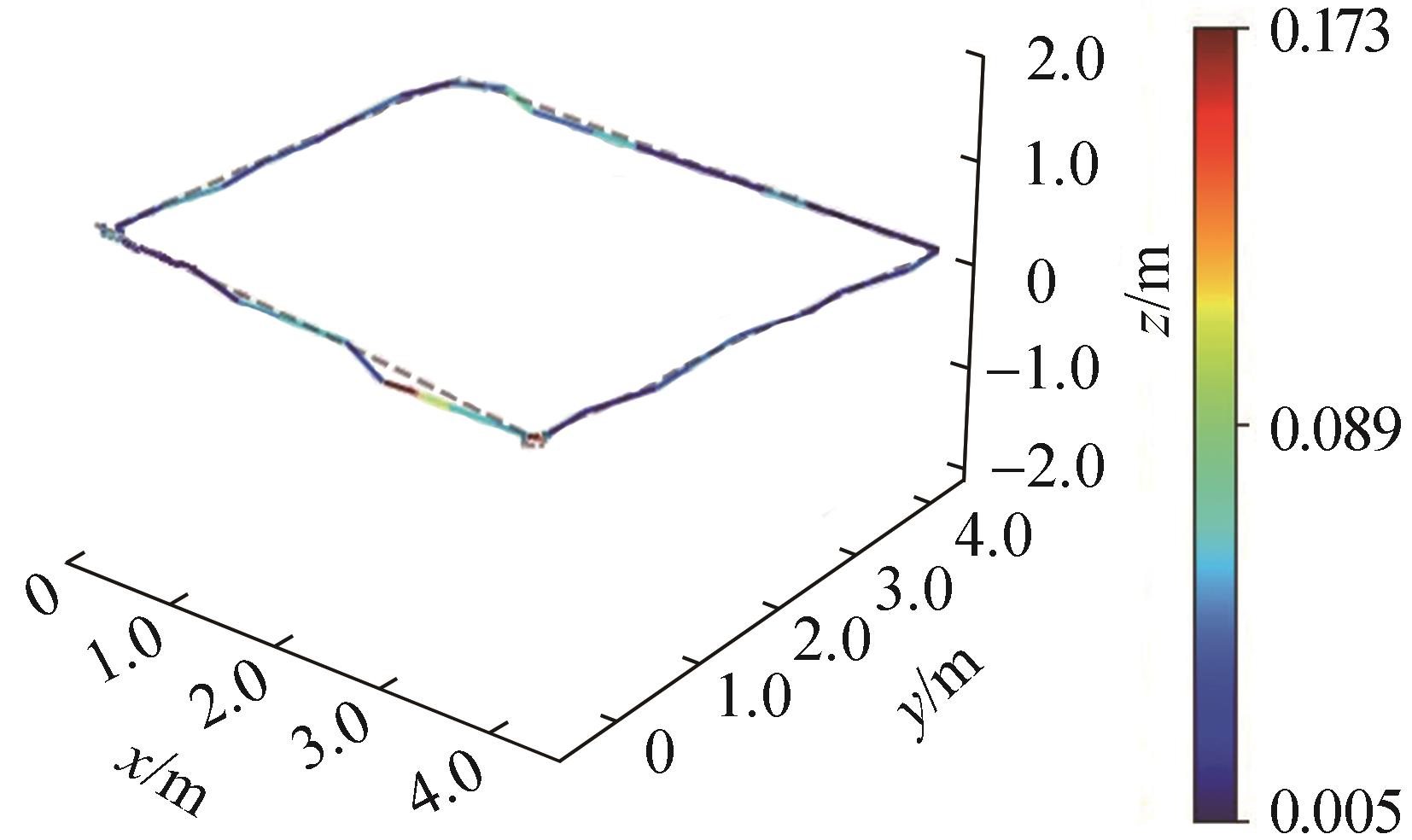
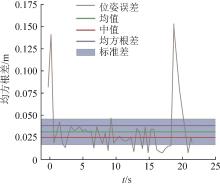
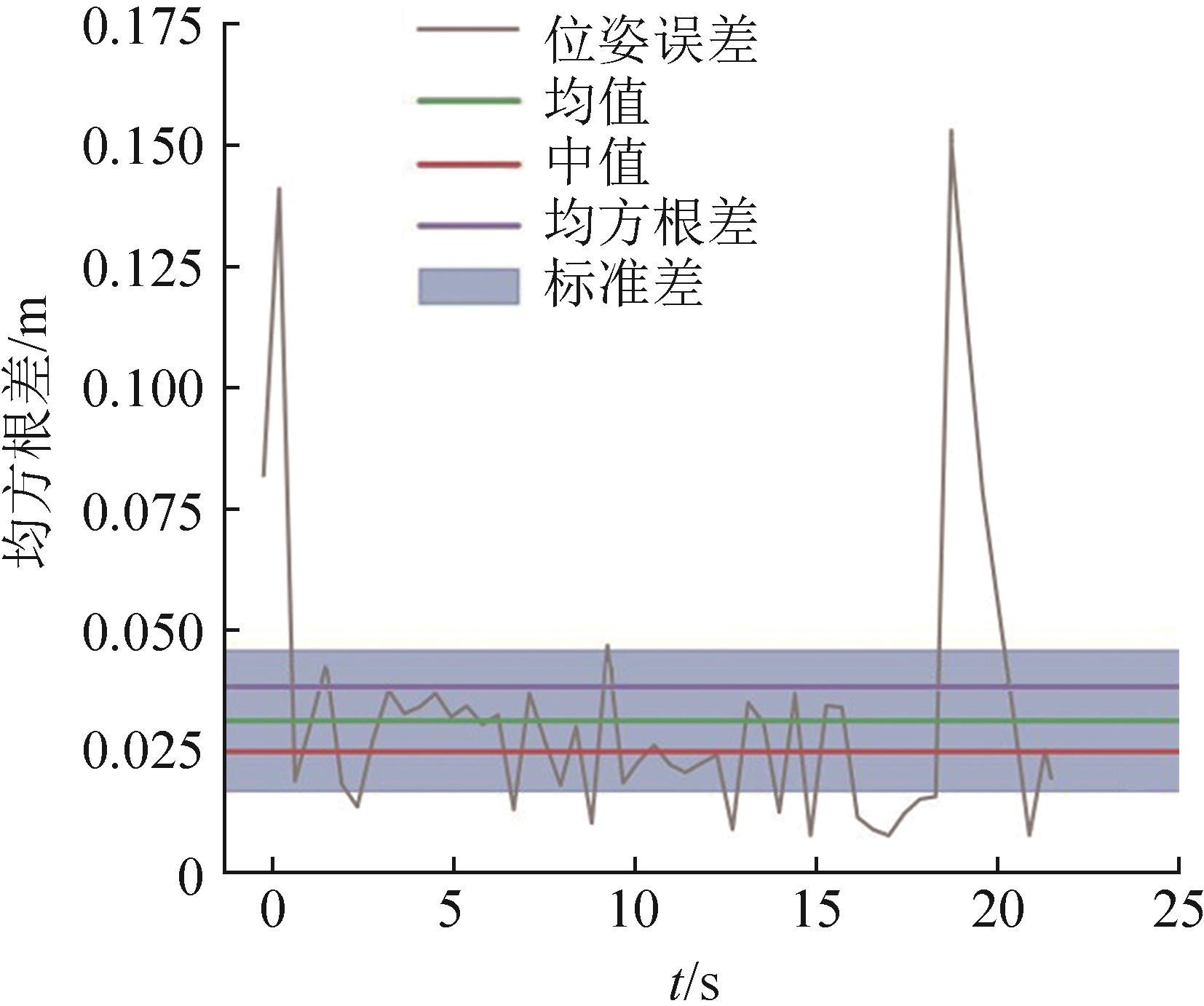
Fig. 14
Pose error of LEO mobile robot camera
| 1 | 魏彤, 龙琛. 基于改进遗传算法的移动机器人路径规划[J]. 北京航空航天大学学报, 2020, 46(4): 703-711. |
| Wei Tong, Long Chen. Path Planning for Mobile Robot Based on Improved Genetic Algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711. | |
| 2 | 翟敬梅, 刘坤, 徐晓. 室内移动机器人自主导航系统设计与方法[J]. 计算机集成制造系统, 2020, 26(4): 890-899. |
| Zhai Jingmei, Liu Kun, Xu Xiao. Autonomous Indoor Navigation System of Mobile Robot[J]. Computer Integrated Manufacturing Systems, 2020, 26(4): 890-899. | |
| 3 | Li Jinquan, Pei Ling, Zou Danping, et al. Attention-SLAM: A Visual Monocular SLAM Learning from Human Gaze[J]. IEEE Sensors Journal, 2021, 21(5): 6408-6420. |
| 4 | Garcia-Fidalgo Emilio, Ortiz Alberto. Vision-based Topological Mapping and Localization Methods: A Survey[J]. Robotics and Autonomous Systems, 2015, 64: 1-20. |
| 5 | Yu Huaiyuan, Zhu Haijiang, Huang Fengrong. Visual Simultaneous Localization and Mapping (SLAM) Based on Blurred Image Detection[J]. Journal of Intelligent & Robotic Systems, 2021, 103(1): 12. |
| 6 | 胡凌燕, 曹禄, 熊鹏文, 等. 基于RGB-D图像的三维同步定位与建图研究[J]. 系统仿真学报, 2017, 29(11): 2840-2846. |
| Hu Lingyan, Cao Lu, Xiong Pengwen, et al. 3D Simultaneous Localization and Mapping Based on RGB-D Images[J]. Journal of System Simulation, 2017, 29(11): 2840-2846. | |
| 7 | Krombach Nicola, Droeschel David, Houben Sebastian, et al. Feature-based Visual Odometry Prior for Real-time Semi-dense Stereo SLAM[J]. Robotics and Autonomous Systems, 2018, 109: 38-58. |
| 8 | Tang Yunchao, Qiu Jiajun, Zhang Yunqi, et al. Optimization Strategies of Fruit Detection to Overcome the Challenge of Unstructured Background in Field Orchard Environment: A Review[J]. Precision Agriculture, 2023, 24(4): 1183-1219. |
| 9 | Schöps Thomas, Sattler Torsten, Pollefeys Marc. BAD SLAM: Bundle Adjusted Direct RGB-D SLAM[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2019: 134-144. |
| 10 | Engel Jakob, Sturm Jürgen, Cremers Daniel. Semi-dense Visual Odometry for a Monocular Camera[C]//2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 1449-1456. |
| 11 | Engel Jakob, Schöps Thomas, Cremers Daniel. LSD-SLAM: Large-scale Direct Monocular SLAM[C]//Computer Vision-ECCV 2014. Cham: Springer International Publishing, 2014: 834-849. |
| 12 | Forster Christian, Pizzoli Matia, Scaramuzza Davide. SVO: Fast Semi-direct Monocular Visual Odometry[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2014: 15-22. |
| 13 | Engel Jakob, Koltun V, Cremers Daniel. Direct Sparse Odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625. |
| 14 | Davison A J, Reid I D, Molton N D, et al. MonoSLAM: Real-time Single Camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 15 | Klein G, Murray D. Parallel Tracking and Mapping for Small AR Workspaces[C]//2007 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway: IEEE, 2007: 225-234. |
| 16 | Mur-Artal Raúl, Montiel J M M, Tardós Juan D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 17 | 于雅楠, 史敦煌, 华春杰. 特征点法SLAM视觉里程计自适应优化算法[J]. 系统仿真学报, 2022, 34(1): 104-112. |
| Yu Ya'nan, Shi Dunhuang, Hua Chunjie. Adaptive Optimization in Feature-based SLAM Visual Odometry[J]. Journal of System Simulation, 2022, 34(1): 104-112. | |
| 18 | 权美香, 朴松昊, 李国. 视觉SLAM综述[J]. 智能系统学报, 2016, 11(6): 768-776. |
| Quan Meixiang, Songhao Piao, Li Guo. An Overview of Visual SLAM[J]. CAAI Transactions on Intelligent Systems, 2016, 11(6): 768-776. | |
| 19 | Mur-Artal Raúl, Tardós Juan D. ORB-SLAM2: An Open-source SLAM System for Monocular, Stereo, and RGB-D Cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 20 | Cui Linyan, Ma Chaowei, Wen Fei. Direct-ORB-SLAM: Direct Monocular ORB-SLAM[J]. Journal of Physics: Conference Series, 2019, 1345(3): 032016. |
| 21 | Gomez-Ojeda Ruben, Moreno Francisco-Angel, Zuñiga-Noël David, et al. PL-SLAM: A Stereo SLAM System Through the Combination of Points and Line Segments[J]. IEEE Transactions on Robotics, 2019, 35(3): 734-746. |
| 22 | Xie Pengfa, Su Weihua, Li Boyang, et al. Modified Keyframe Selection Algorithm and Map Visualization Based on ORB-SLAM2[C]//2020 4th International Conference on Robotics and Automation Sciences (ICRAS). Piscataway: IEEE, 2020: 142-147. |
| 23 | Campos Carlos, Elvira Richard, J Gómez Rodríguez Juan, et al. ORB-SLAM3: An Accurate Open-source Library for Visual, Visual-inertial, and Multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 24 | Galvez-López Dorian, Tardos Juan D. Bags of Binary Words for Fast Place Recognition in Image Sequences[J]. IEEE Transactions on Robotics, 2012, 28(5): 1188-1197. |
| 25 | Elvira Richard, Tardós Juan D, Montiel J M M. ORBSLAM-atlas: A Robust and Accurate Multi-map System[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2019: 6253-6259. |
| 26 | Rosin P L. Measuring Corner Properties[J]. Computer Vision and Image Understanding, 1999, 73(2): 291-307. |
| [1] | Cao Mingwei, Wang Fengna, Wang Zilong, Zhao Haifeng. Neural Radiance Fields Based on Explicit Feature Matching and Scaled Dot-product Attention [J]. Journal of System Simulation, 2026, 38(3): 572-583. |
| [2] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [3] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [4] | Lin Guijuan, Li Zihan, Wang Yu. Research on Improved A* Algorithm Path Planning Based on Global Key Point Extraction [J]. Journal of System Simulation, 2025, 37(3): 667-678. |
| [5] | Li Ruoqing, Zhao Yaochi, Hu Zhuhua, Qi Wenlu, Liu Guangfeng. TOHF: A Feature Extractor for Resource-constrained Indoor VSLAM [J]. Journal of System Simulation, 2025, 37(3): 691-703. |
| [6] | Li Jiongyi, Li Qiang, Zhang Xinwen, Htet Zin Myo, Cai Yongbin. Improved Bidirectional A* Quadratic Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2025, 37(2): 498-507. |
| [7] | Liu Jia, Zhang Zengwei, Chen Dapeng, Huang Nanxuan, Wang Bin, Song Hong. Improvement of SLAM Localization Accuracy in AR by Enhancing YOLOv8 [J]. Journal of System Simulation, 2025, 37(11): 2701-2713. |
| [8] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [9] | Yang Lanying, Li Chao, Zou Haifeng, Wan Jiangtao, Zhang Renqiang, Liu Hui, Lu Hong. Robot Path Planning Optimization Based on Fusion of Improved Ant Colony Algorithm and A* Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2956-2965. |
| [10] | Luo Yi, Deng Jia. Path Planning for Mobile Robots Based on Improved RRT-Connect and DWA Fusion [J]. Journal of System Simulation, 2025, 37(10): 2545-2556. |
| [11] | Xu Jianmin, Song Lei, Deng Dongdong, Chen Yaoruo, Yang Wei. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized DWA Algorithm [J]. Journal of System Simulation, 2025, 37(1): 257-270. |
| [12] | Sun Haijie, San Hongjun, Xiao Le, Yao Dexin, Chen Jiupeng, Yang Xiaoyuan. An Improved Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2024, 36(9): 2193-2207. |
| [13] | Wang Haichao, Yin Yong, Jing Qianfeng, Cong Lin. Estimation of the Berthing Parameter of Unmanned Surface Vessels Based on 3D LiDAR [J]. Journal of System Simulation, 2024, 36(8): 1737-1748. |
| [14] | Kang Liang, Du Yi, Yin Lihua. An Improved Cat Swarm Optimization for Heterogeneous Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(8): 1958-1968. |
| [15] | Wang Yaru, Yao Dexin, Liu Zengli, Peng Yi. Path Planning for Mobile Robot Based on Angle Search [J]. Journal of System Simulation, 2024, 36(7): 1643-1654. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
