

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (8): 1884-1894.doi: 10.16182/j.issn1004731x.joss.24-0233
• Papers • Previous Articles Next Articles
Lai Rongshen, Dou Lei, Wu Zhiyong, Sun Shuai
Received:2024-03-13
Revised:2024-04-26
Online:2024-08-15
Published:2024-08-19
CLC Number:
Lai Rongshen, Dou Lei, Wu Zhiyong, Sun Shuai. Fusion of Improved A* and Dynamic Window Approach for Mobile Robot Path Planning[J]. Journal of System Simulation, 2024, 36(8): 1884-1894.
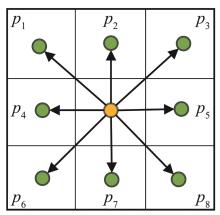
Fig. 1
Schematic diagram of node extension direction
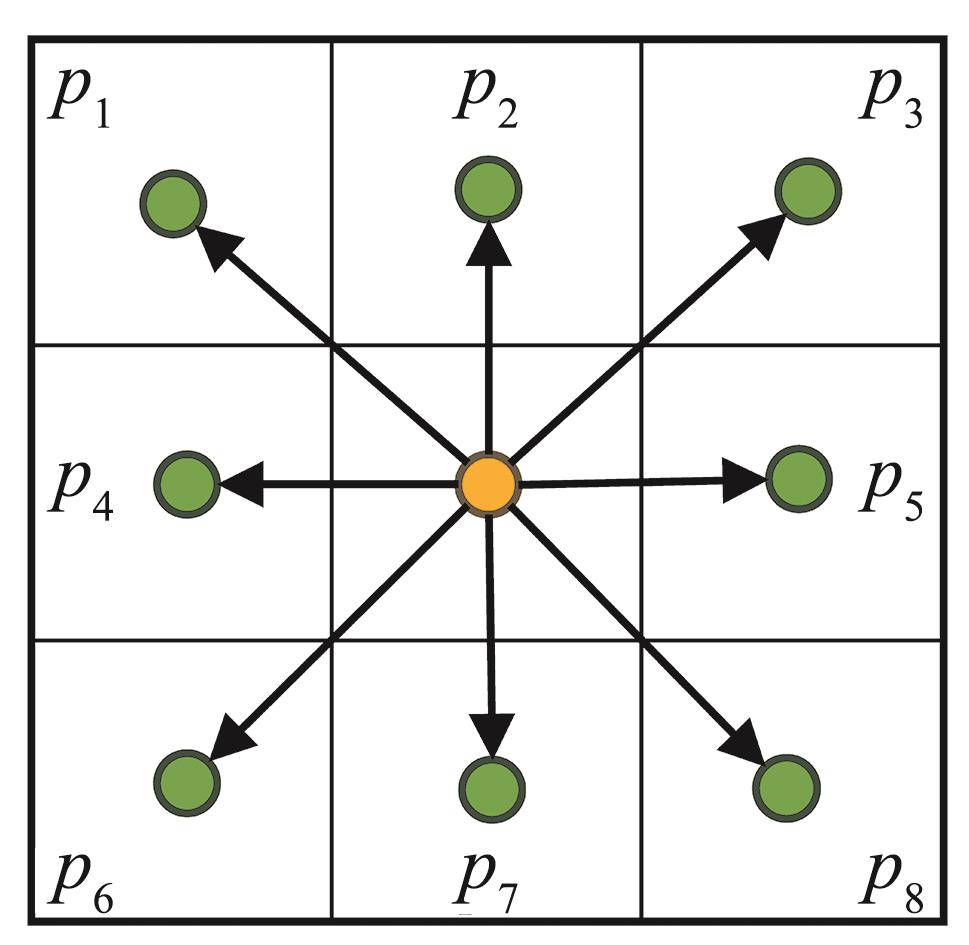
Table 1
Node direction selection table
| 角度值 | 保留5方向 | 舍去3方向 |
|---|---|---|
| p1、p2、p3、p5、p8 | p4、p6、p7 | |
| p2、p3、p5、p7、p8 | p1、p4、p6 | |
| p3、p5、p6、p7、p8 | p1、p2、p4 | |
| p4、p5、p6、p7、p8 | p1、p2、p3 | |
| p1、p4、p6、p7、p8 | p2、p3、p5 | |
| p1、p2、p4、p6、p7 | p3、p5、p8 | |
| p1、p2、p3、p4、p6 | p5、p7、p8 | |
| p1、p2、p3、p4、p5 | p6、p7、p8 |
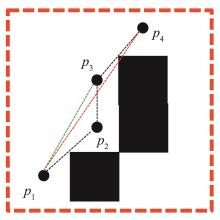
Fig. 2
Key node extraction
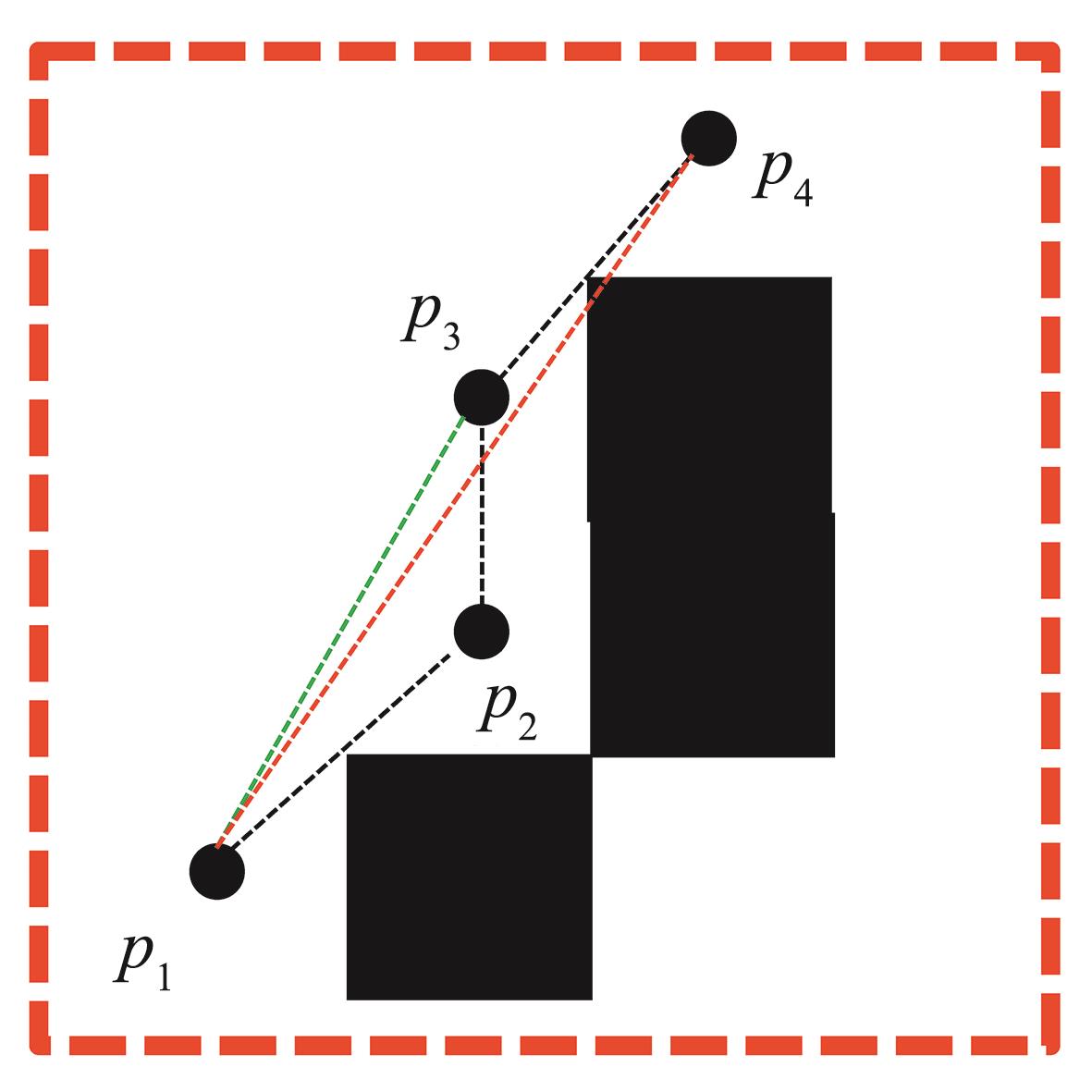
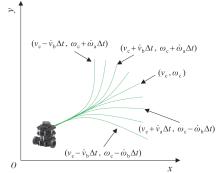
Fig. 3
Trajectory prediction
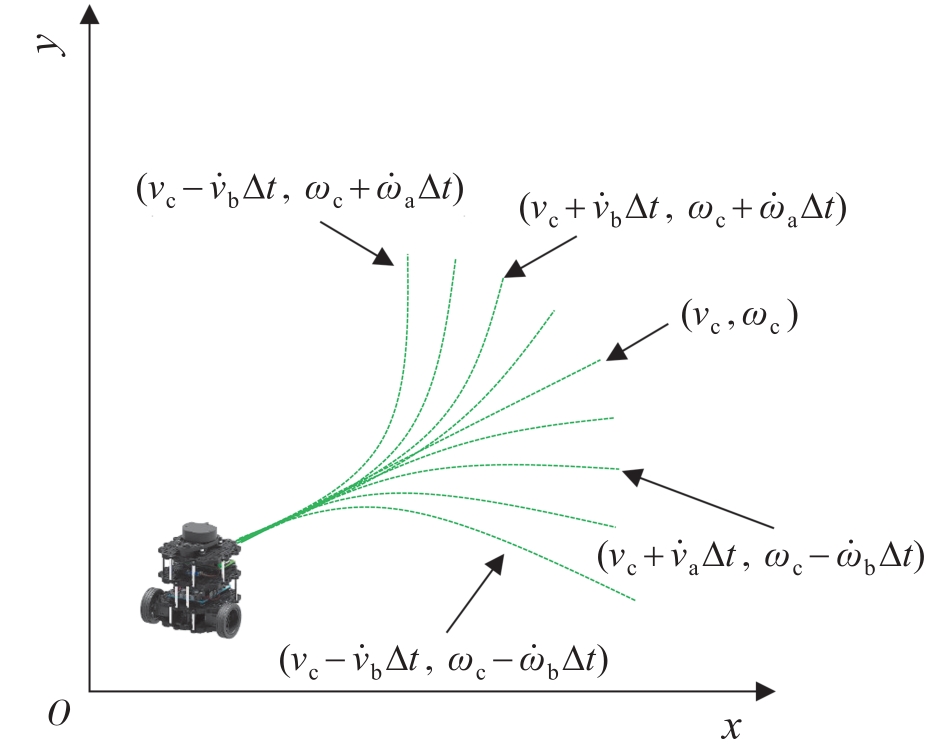

Fig. 4
Flowchart of fusion algorithm
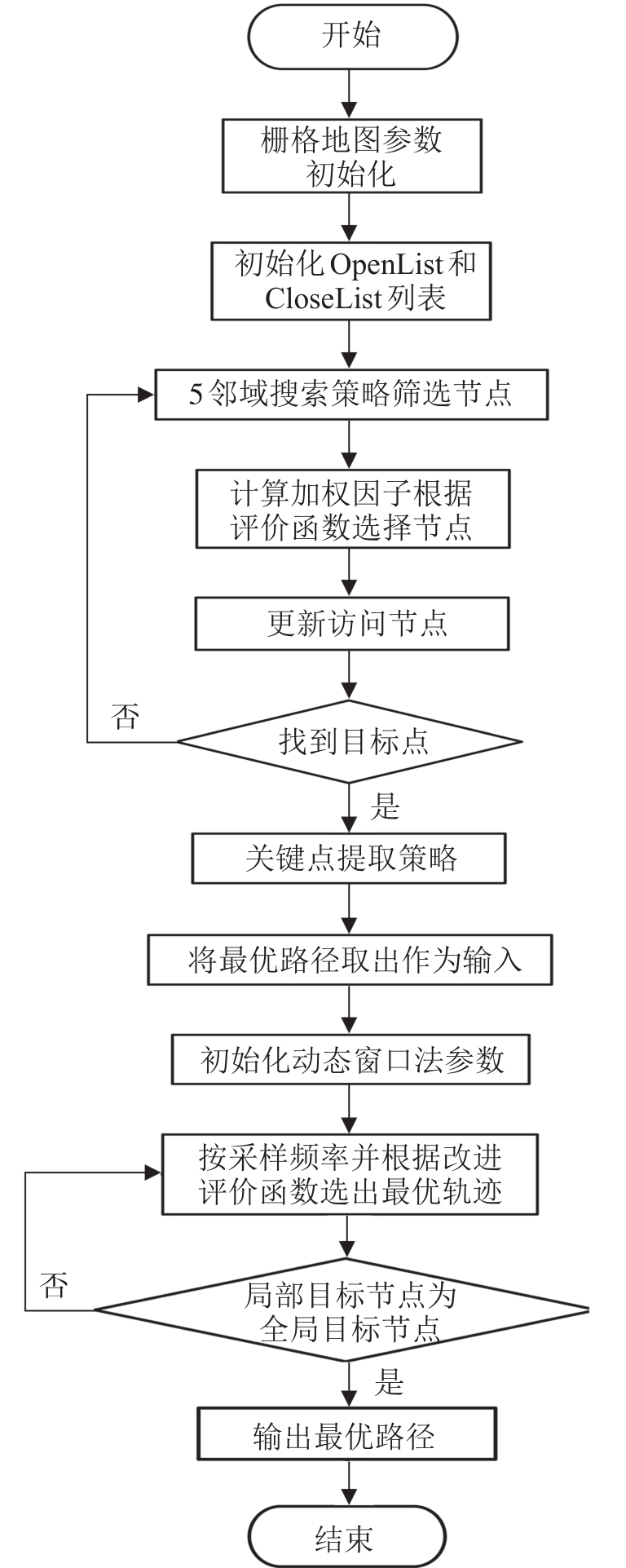
Table 2
Mobile robot properties and initial properties of the dynamic window method
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 最大线速度 | 1.0 | 方位角评价系数 | 0.2 |
| 最大角速度 | 20 | 障碍物距离评价系数 | 0.1 |
| 线加速度 | 0.2 | 速度评价系数 | 0.3 |
| 角加速度 | 50 | 偏移距离评价系数 | 0.4 |
| 线速度分辨率 | 0.01 | 采样时间/s | 3 |
| 角速度分辨率 | 1 | 距离阈值/m | 0.5 |

Fig. 5
Comparison of A* algorithm paths
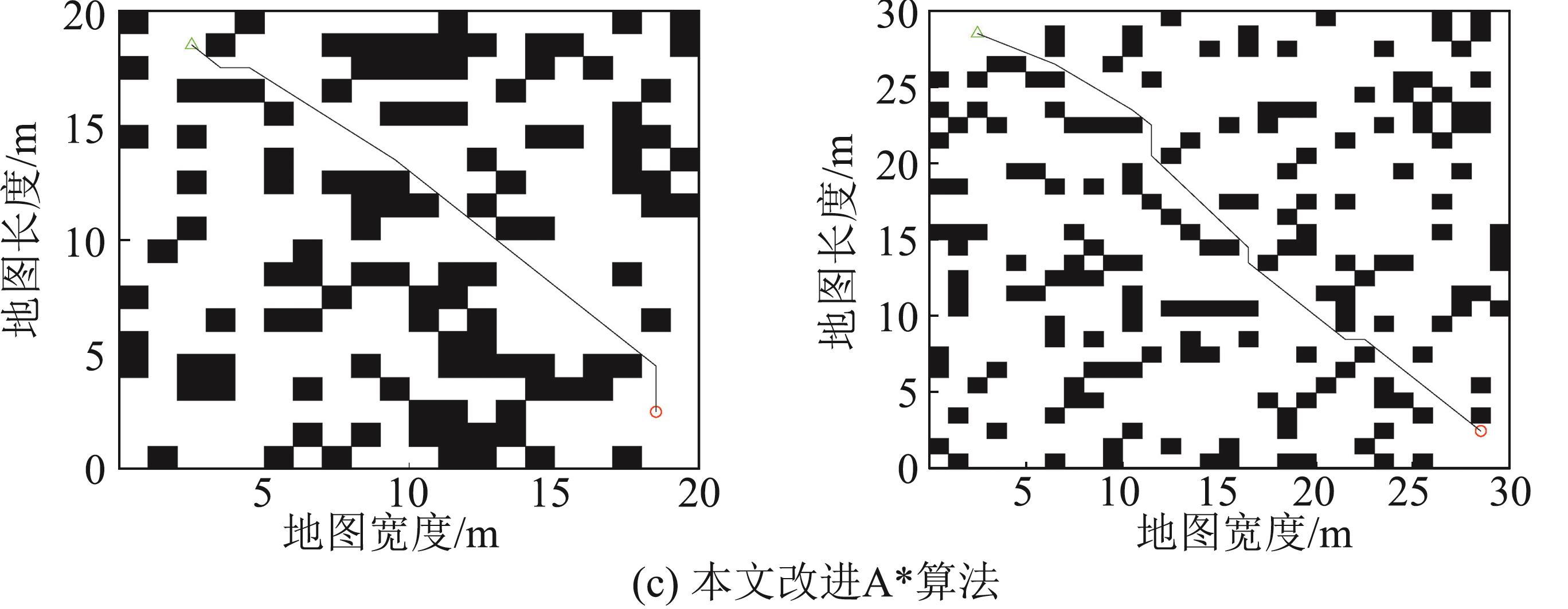
Table 3
Comparison of results of improved algorithms
| 地图规格 | 算法名称 | 路径长度/m | 运算时间/s |
|---|---|---|---|
| 20×20 | 传统A*算法 | 23.799 | 0.025 |
| 文献[ | 23.748 | 0.021 | |
| 本文改进A*算法 | 23.545 | 0.016 | |
| 30×30 | 传统A*算法 | 39.527 | 0.085 |
| 文献[ | 39.476 | 0.056 | |
| 本文改进A*算法 | 39.253 | 0.028 |

Fig. 6
Comparison of fusion algorithm paths

Table 4
Comparison of fusion algorithm results
| 地图规格 | 算法名称 | 路径长度/m | 运算时间/s |
|---|---|---|---|
| 20×20 | 融合传统DWA算法 | 24.529 | 143.04 |
融合文献[ DWA算法 | 24.497 | 144.99 | |
融合本文改进 DWA算法 | 24.197 | 152.82 | |
| 30×30 | 融合传统DWA算法 | 40.247 | 527.12 |
融合文献[ DWA算法 | 40.226 | 521.69 | |
| 融合本文改进DWA算法 | 39.449 | 552.09 |

Fig. 7
Comparison of motion states of fusion algorithms
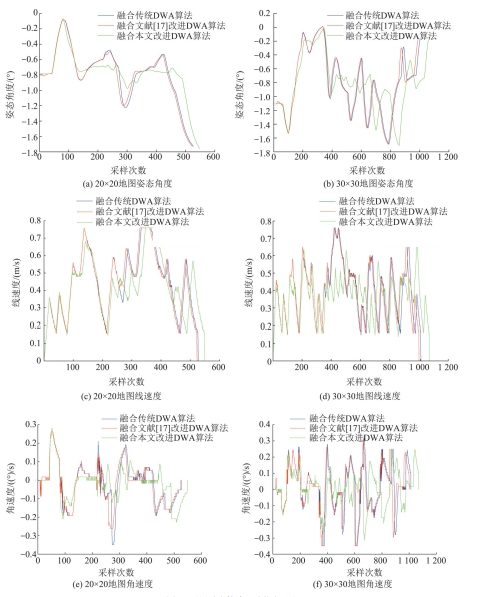
Table 5
Fusion algorithm angle variation
| 地图规格 | 算法名称 | 角度方差 | 角度标准差 |
|---|---|---|---|
| 20×20 | 融合传统DWA算法 | 0.341 8 | 0.116 8 |
| 融合文献[ | 0.339 3 | 0.115 1 | |
| 融合本文改进DWA算法 | 0.292 0 | 0.085 3 | |
| 30×30 | 融合传统DWA算法 | 0.442 2 | 0.195 5 |
| 融合文献[ | 0.443 1 | 0.196 3 | |
| 融合本文改进DWA算法 | 0.392 3 | 0.153 9 |
Table 6
Fusion algorithm line speed change
| 地图规格 | 算法名称 | 线速度方差 | 线速度标准差 |
|---|---|---|---|
| 20×20 | 融合传统DWA算法 | 0.179 5 | 0.032 2 |
| 融合文献[ | 0.180 1 | 0.032 5 | |
| 融合本文改进DWA算法 | 0.168 0 | 0.028 2 | |
| 30×30 | 融合传统DWA算法 | 0.153 3 | 0.023 5 |
| 融合文献[ | 0.152 7 | 0.023 3 | |
| 融合本文改进DWA算法 | 0.111 8 | 0.012 5 |
Table 7
Fusion algorithm angular velocity change
| 地图规格 | 算法名称 | 角速度方差 | 角速度标准差 |
|---|---|---|---|
| 20×20 | 融合传统DWA算法 | 0.114 9 | 0.013 2 |
| 融合文献[ | 0.112 1 | 0.012 6 | |
| 融合本文改进DWA算法 | 0.090 3 | 0.008 2 | |
| 30×30 | 融合传统DWA算法 | 0.140 6 | 0.019 8 |
| 融合文献[ | 0.141 2 | 0.019 9 | |
| 融合本文改进DWA算法 | 0.110 5 | 0.012 2 |
| 1 | Tang Meiqin, Sheng Jiawen, Sun Shaoyan. A Coverage Optimization Algorithm for Underwater Acoustic Sensor Networks Based on Dijkstra Method[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(8): 1769-1771. |
| 2 | 许建民, 宋雷, 邓冬冬, 等. 基于多尺度A*与优化DWA算法融合的移动机器人路径规划[J/OL]. 系统仿真学报. (2023-11-22) [2024-04-24]. . |
| Xu Jianmin, Song Lei, Deng Dongdong, et al. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized Dynamic-window Approach Algorithm[J/OL]. Journal of System Simulation. (2023-11-22) [2024-04-24]. . | |
| 3 | 黄鲁, 周非同. 基于路径优化D*Lite算法的移动机器人路径规划[J]. 控制与决策, 2020, 35(4): 877-884. |
| Huang Lu, Zhou Feitong. Path Planning of Moving Robot Based on Path Optimization of D* Lite Algorithm[J]. Control and Decision, 2020, 35(4): 877-884. | |
| 4 | 常路, 单梁, 戴跃伟, 等. 未知环境下基于改进DWA的多机器人编队控制[J]. 控制与决策, 2022, 37(10): 2524-2534. |
| Chang Lu, Shan Liang, Dai Yuewei, et al. Multi-robot Formation Control in Unknown Environment Based on Improved DWA[J]. Control and Decision, 2022, 37(10): 2524-2534. | |
| 5 | 鲜斌, 宋宁. 基于模型预测控制与改进人工势场法的多无人机路径规划[J/OL]. 控制与决策. (2024-01-02) [2024-02-01]. . |
| Xian Bin, Song Ning. A Multiple UAVs Path Planning Method Based on Model Predictive Control and Improved Artificial Potential Field[J/OL]. Control and Decision. (2024-01-02) [2024-02-01]. . | |
| 6 | 崔宝侠, 王淼弛, 段勇. 基于可搜索24邻域的A*算法路径规划[J]. 沈阳工业大学学报, 2018, 40(2): 180-184. |
| Cui Baoxia, Wang Miaochi, Duan Yong. Path Planning for A* Algorithm Based on Searching 24 Neighborhoods[J]. Journal of Shenyang University of Technology, 2018, 40(2): 180-184. | |
| 7 | 槐创锋, 郭龙, 贾雪艳, 等. 改进A*算法与动态窗口法的机器人动态路径规划[J]. 计算机工程与应用, 2021, 57(8): 244-248. |
| Huai Chuangfeng, Guo Long, Jia Xueyan, et al. Improved A* Algorithm and Dynamic Window Method for Robot Dynamic Path Planning[J]. Computer Engineering and Applications, 2021, 57(8): 244-248. | |
| 8 | Min Haitao, Xiong Xiaoyong, Wang Pengyu, et al. Autonomous Driving Path Planning Algorithm Based on Improved A* Algorithm in Unstructured Environment[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2/3): 513-526. |
| 9 | 姬鹏, 张新元, 高帅轩, 等. 融合改进A*算法与动态窗口法的路径规划研究[J/OL]. 系统仿真学报. (2023-09-07) [2024-03-13]. . |
| Ji Peng, Zhang Xinyuan, Gao Shuaixuan, et al. Path Planning Based on Improved A* and Dynamic Window Approach[J/OL]. Journal of System Simulation. (2023-09-07) [2024-03-13]. . | |
| 10 | Lai Rongshen, Wu Zhiyong, Liu Xiangui, et al. Fusion Algorithm of the Improved A* Algorithm and Segmented Bézier Curves for the Path Planning of Mobile Robots[J]. Sustainability, 2023, 15(3): 2483. |
| 11 | 王彬, 聂建军, 李海洋, 等. 优化A*与动态窗口法的移动机器人路径规划[J]. 计算机集成制造系统, 2024, 30(4): 1353-1363. |
| Wang Bin, Nie Jianjun, Li Haiyang, et al. Mobile Robot Path Planning Based on Optimized A* and Dynamic Window Approach[J]. Computer Integrated Manufacturing Systems, 2024, 30(4): 1353-1363. | |
| 12 | 王永雄, 田永永, 李璇, 等. 穿越稠密障碍物的自适应动态窗口法[J]. 控制与决策, 2019, 34(5): 927-936. |
| Wang Yongxiong, Tian Yongyong, Li Xuan, et al. Self-adaptive Dynamic Window Approach in Dense Obstacles[J]. Control and Decision, 2019, 34(5): 927-936. | |
| 13 | 张伟龙, 单梁, 常路, 等. 基于改进DWA的多无人水面艇分布式避碰算法[J]. 控制与决策, 2023, 38(4): 951-962. |
| Zhang Weilong, Shan Liang, Chang Lu, et al. Distributed Collision Avoidance Algorithm for Multiple Unmanned Surface Vessels Based on Improved DWA[J]. Control and Decision, 2023, 38(4): 951-962. | |
| 14 | 邹文, 韩丙辰, 李鹏飞, 等. 融合改进A*算法和优化动态窗口法的路径规划[J]. 计算机集成制造系统, 2024, 30(1): 184-195. |
| Zou Wen, Han Bingchen, Li Pengfei, et al. Path Planning by Integrating Improved A* Algorithm and Optimized Dynamic Window Approach[J]. Computer Integrated Manufacturing Systems, 2024, 30(1): 184-195. | |
| 15 | 程传奇, 郝向阳, 李建胜, 等. 融合改进A*算法和动态窗口法的全局动态路径规划[J]. 西安交通大学学报, 2017, 51(11): 137-143. |
| Cheng Chuanqi, Hao Xiangyang, Li Jiansheng, et al. Global Dynamic Path Planning Based on Fusion of Improved A* Algorithm and Dynamic Window Approach[J]. Journal of Xi'an Jiaotong University, 2017, 51(11): 137-143. | |
| 16 | 张涛, 陈璋, 李玉梅, 等. 融合改进A∗算法与动态窗口法的机器人避障研究[J]. 仪表技术与传感器, 2023(4): 102-106. |
| Zhang Tao, Chen Zhang, Li Yumei, et al. Research on Robot Obstacle Avoidance Based on Improved A* Algorithm and Dynamic Window Method[J]. Instrument Technique and Sensor, 2023(4): 102-106. | |
| 17 | 郭园园, 袁杰, 赵克刚. 基于改进A*算法和动态窗口法的机器人路径规划[J]. 计算机工程与科学, 2022, 44(7): 1273-1281. |
| Guo Yuanyuan, Yuan Jie, Zhao Kegang. Robot Path Planning Based on an Improved A* Algorithm and an Improved Dynamic Window Method[J]. Computer Engineering & Science, 2022, 44(7): 1273-1281. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [15] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
