

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (4): 888-900.doi: 10.16182/j.issn1004731x.joss.22-1381
• Papers • Previous Articles Next Articles
Jiang Zhaozhen1,2,3( ), Wang Wenlong1,2,3(), Sun Wenqi1,2
), Wang Wenlong1,2,3(), Sun Wenqi1,2
Received:2022-11-18
Revised:2023-01-13
Online:2024-04-15
Published:2024-04-18
Contact:
Wang Wenlong
E-mail:1596787157@qq.com;wilon7521@qq.com
CLC Number:
Jiang Zhaozhen, Wang Wenlong, Sun Wenqi. Path Planning Rapid Algorithm Based on Modified RRT* for Unmanned Surface Vessel[J]. Journal of System Simulation, 2024, 36(4): 888-900.
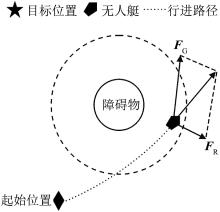
Fig. 1
APF algorithm
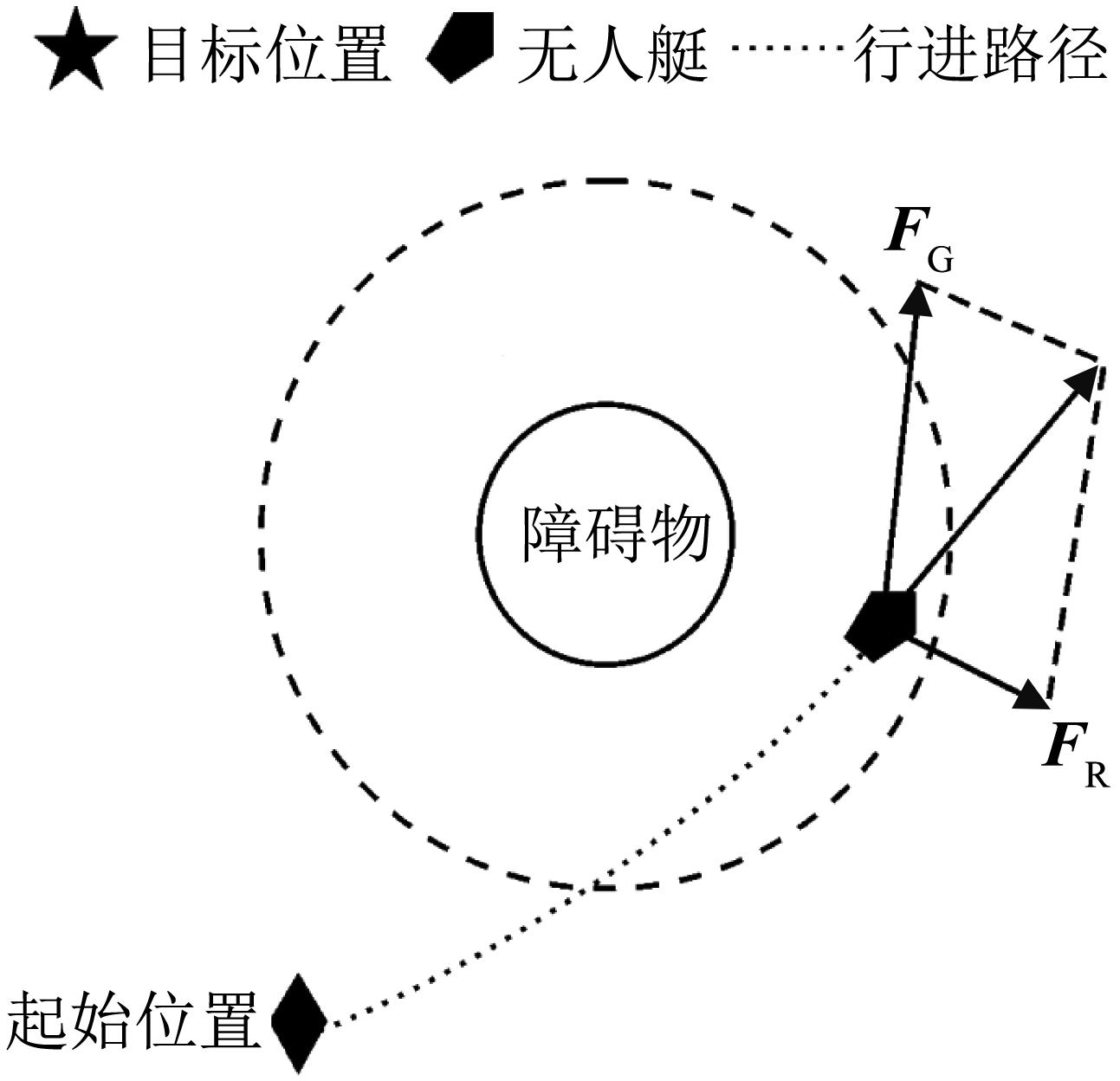
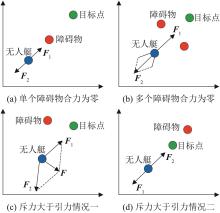
Fig. 2
Several target unreachable situations
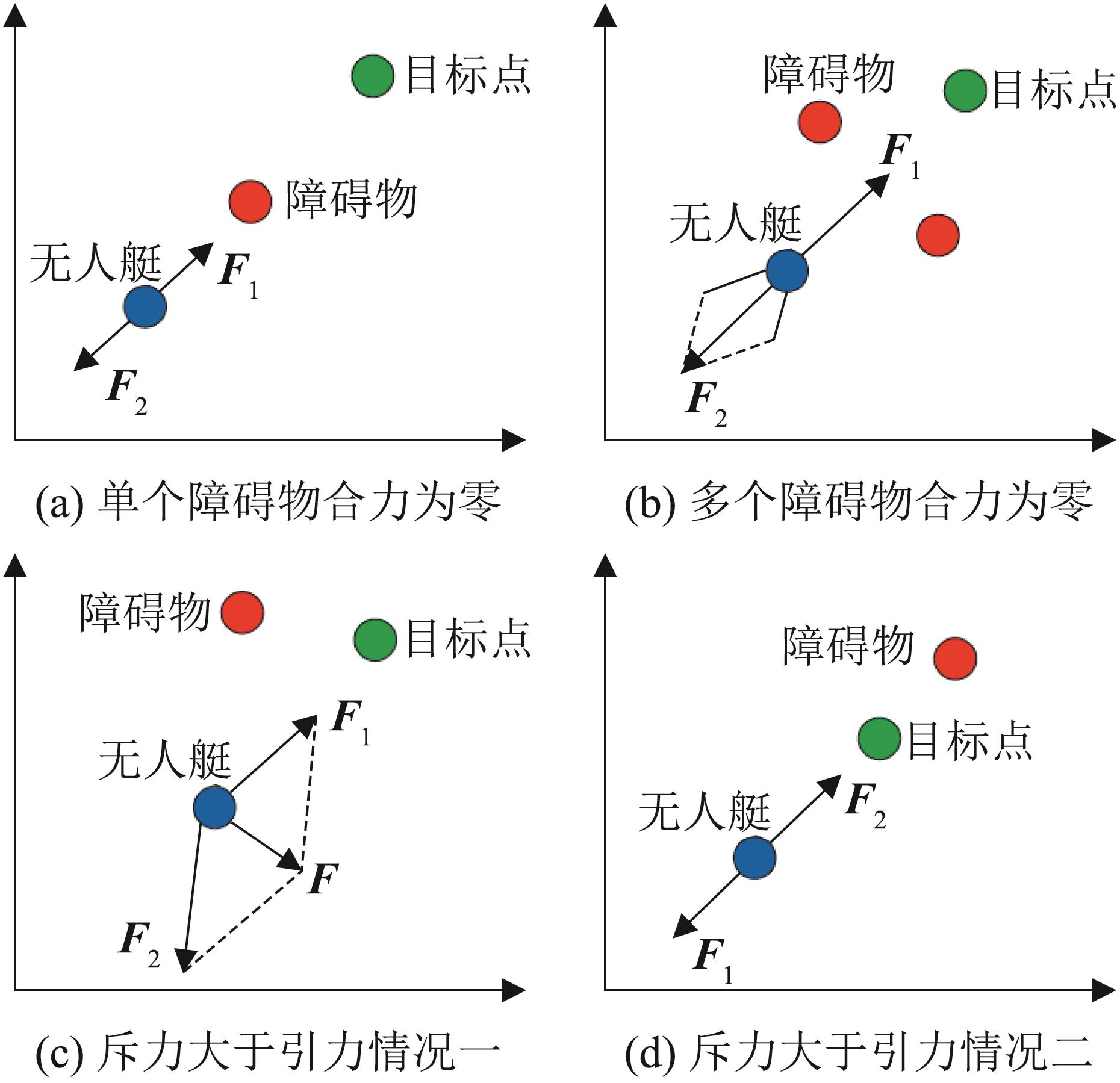
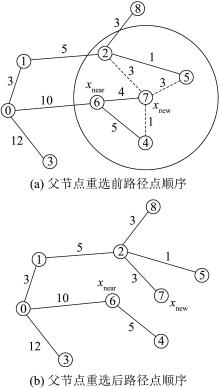
Fig. 3
Process of reselecting parent node
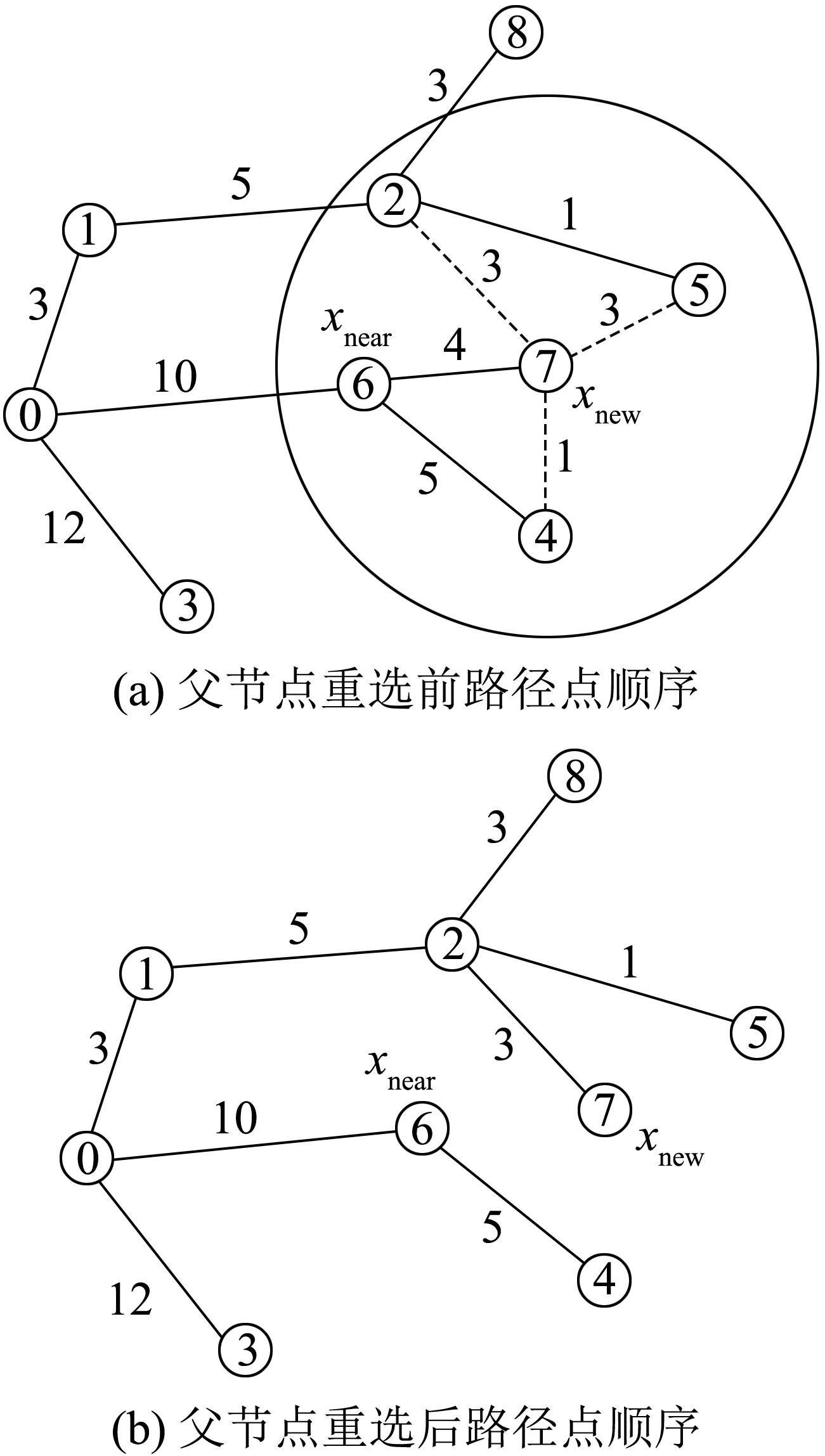
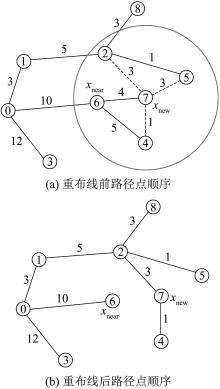
Fig. 4
Process of rewiring
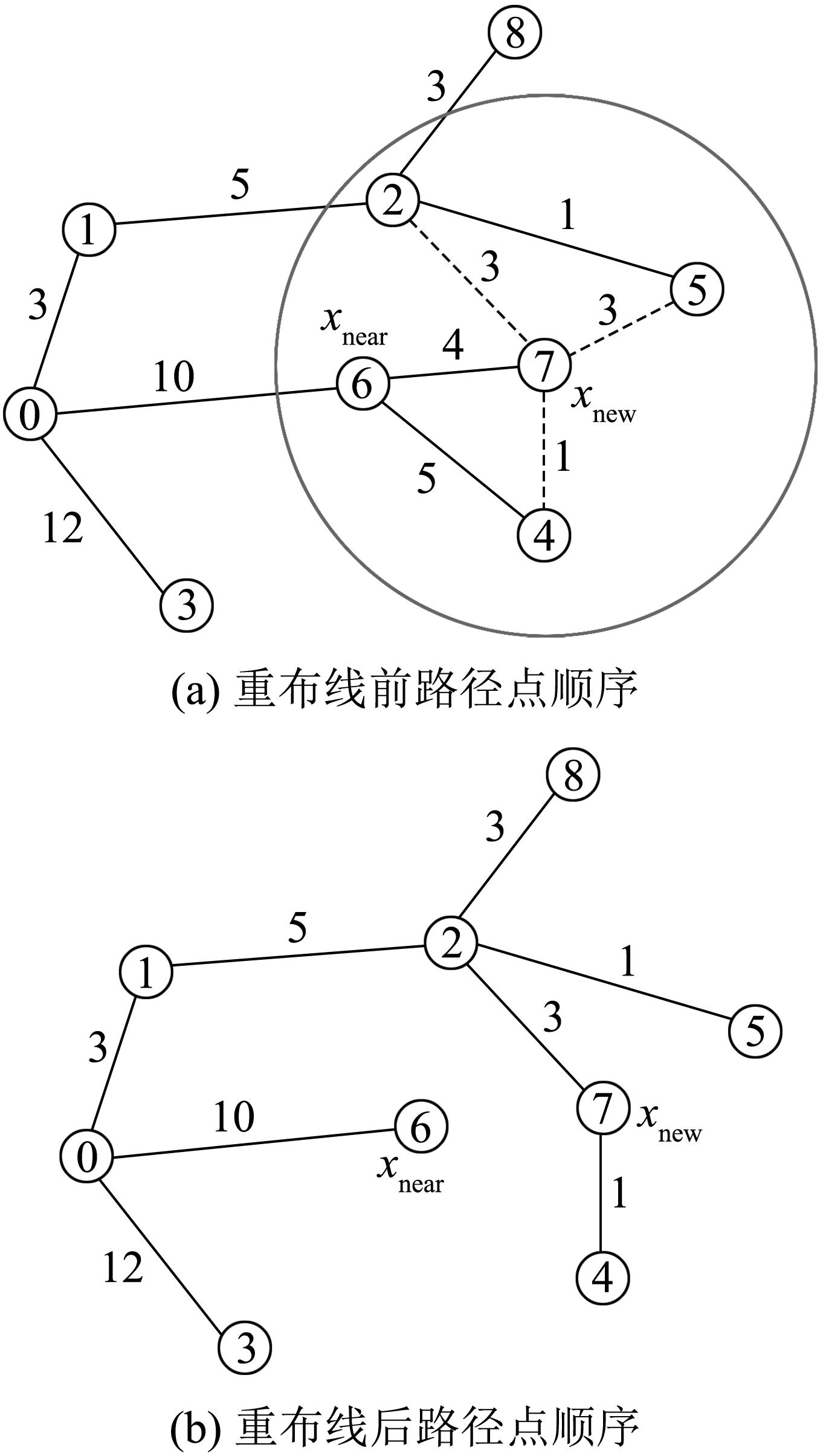
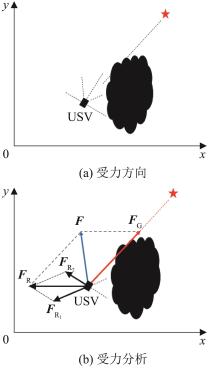
Fig. 5
Force analysis diagram of improved APF
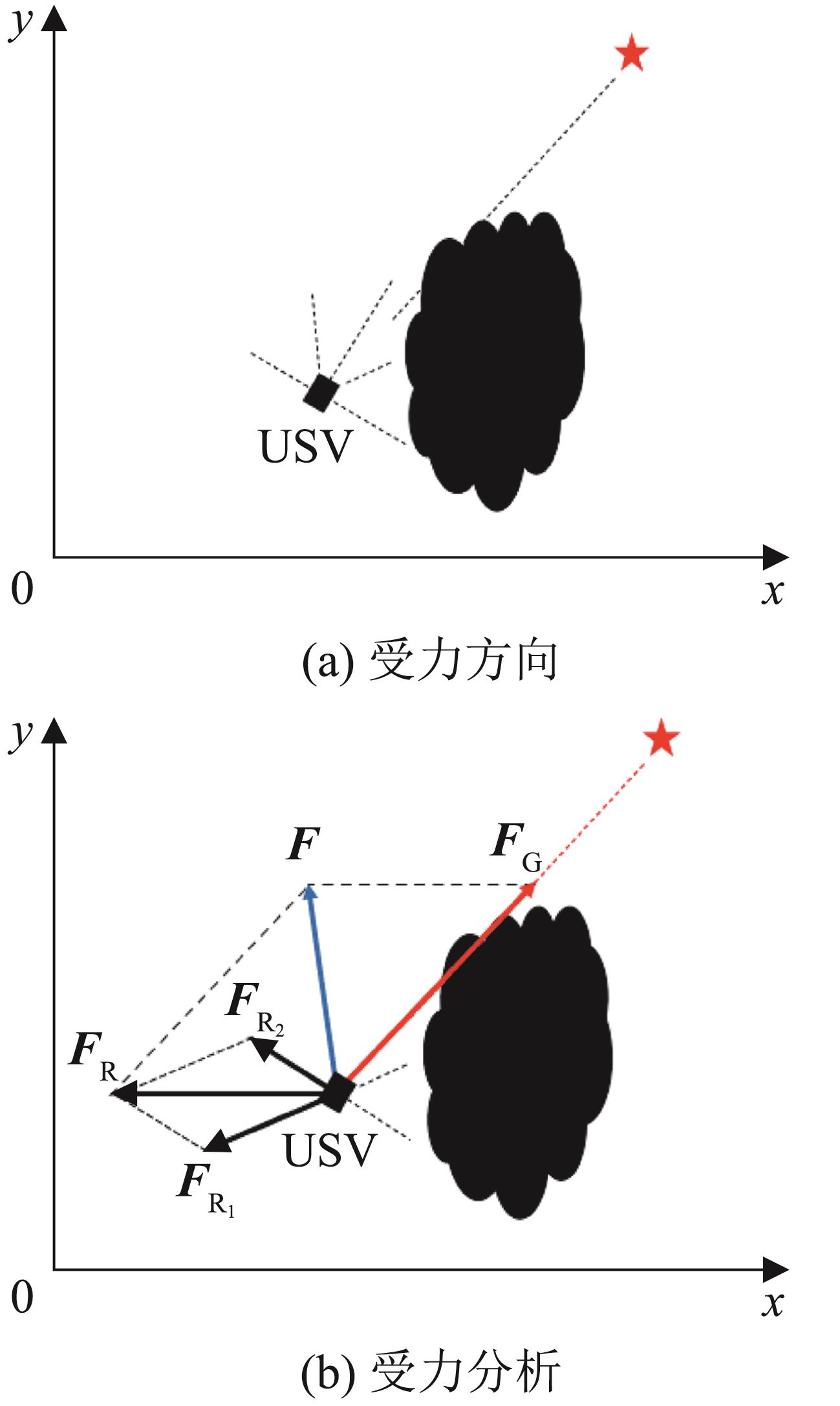
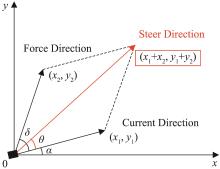
Fig. 6
Steering angle
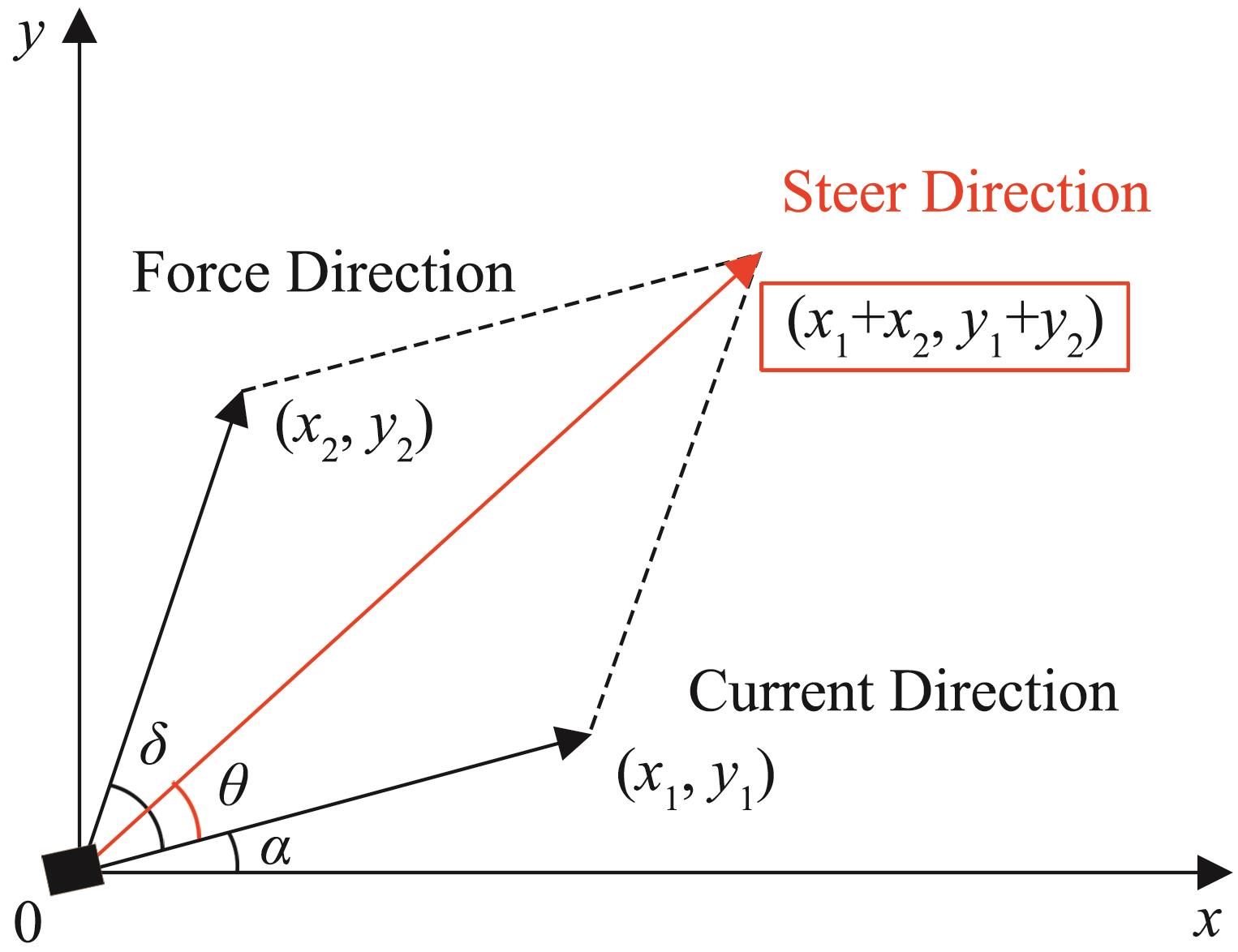
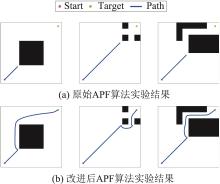
Fig. 7
Experimental results of original APF and improved APF
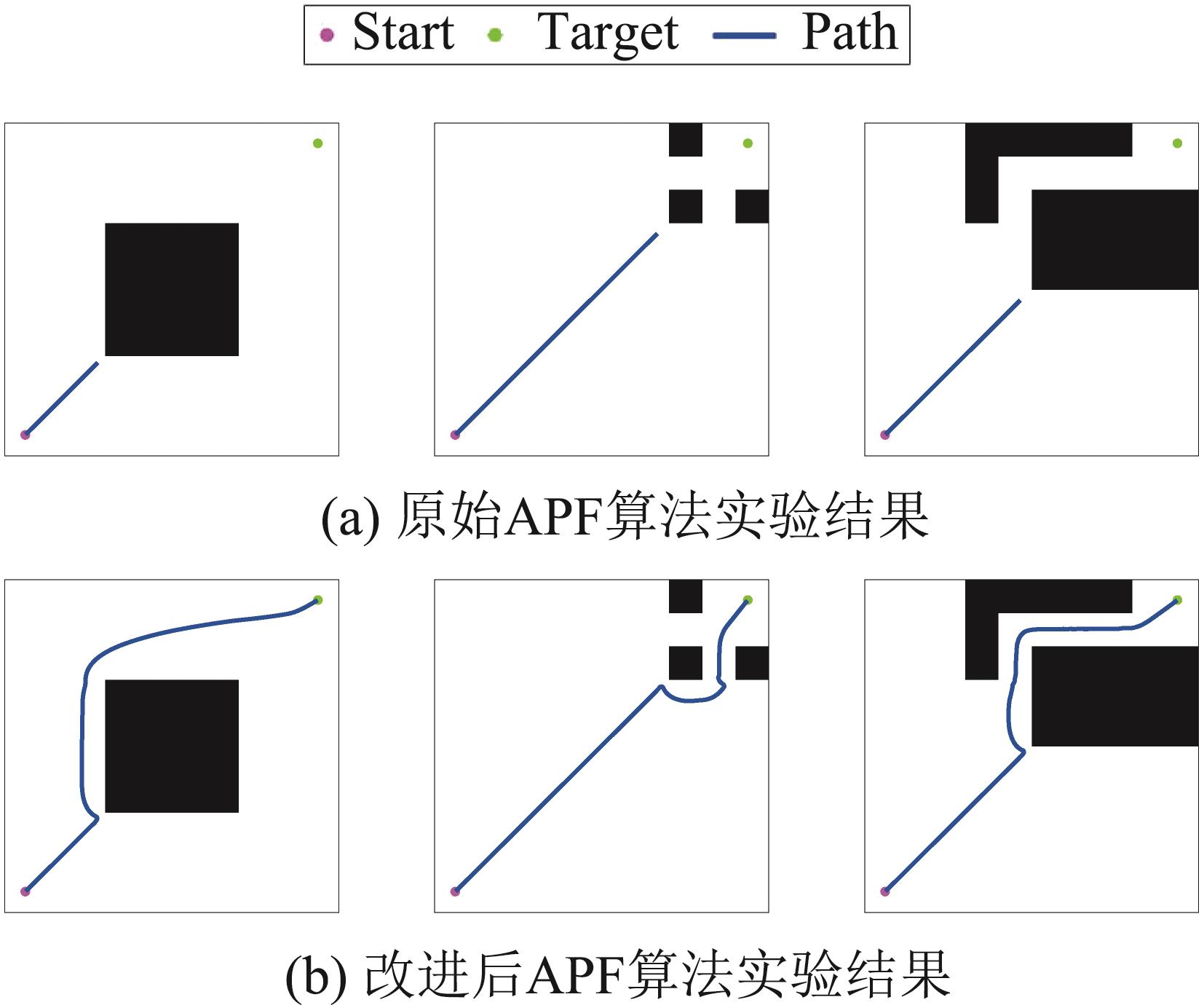

Fig. 8
Enlarged image of area before turning
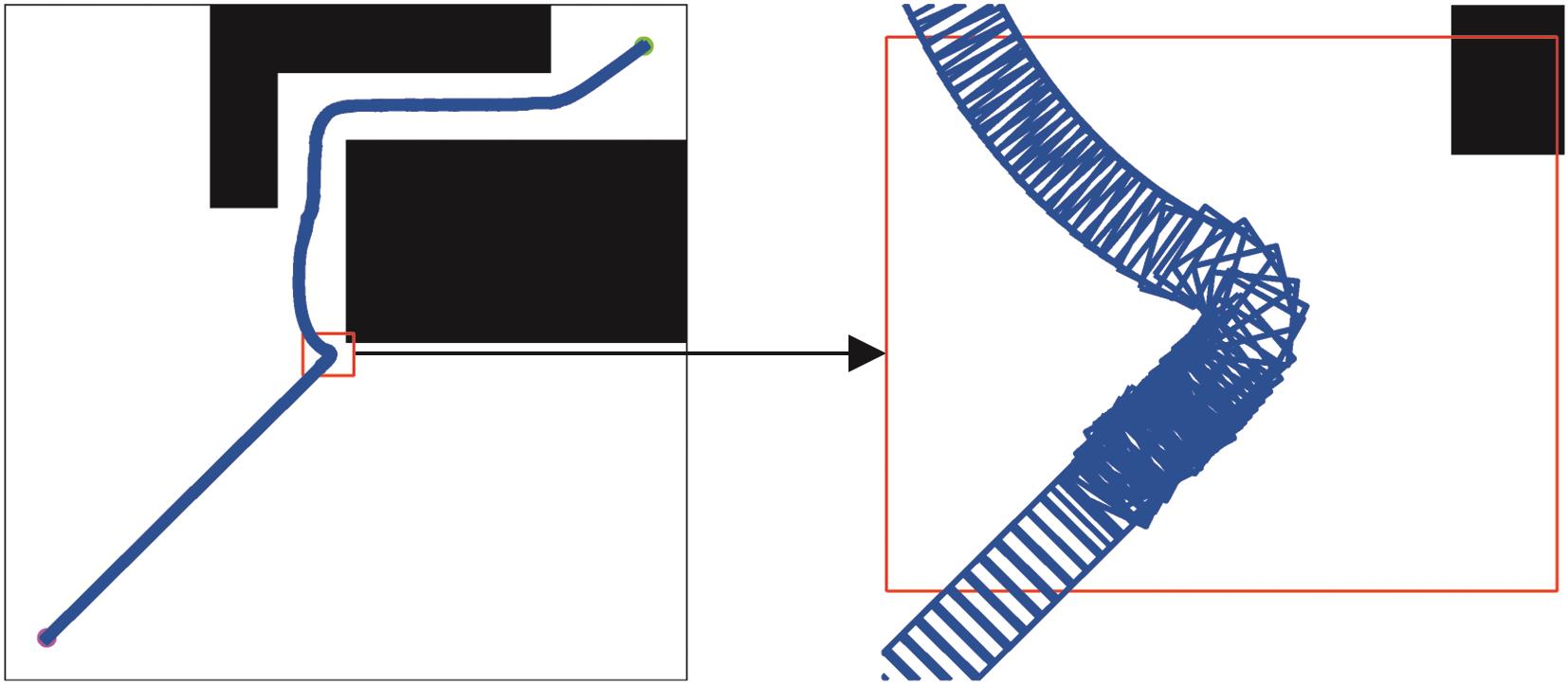

Fig. 9
Two methods of sample area setting
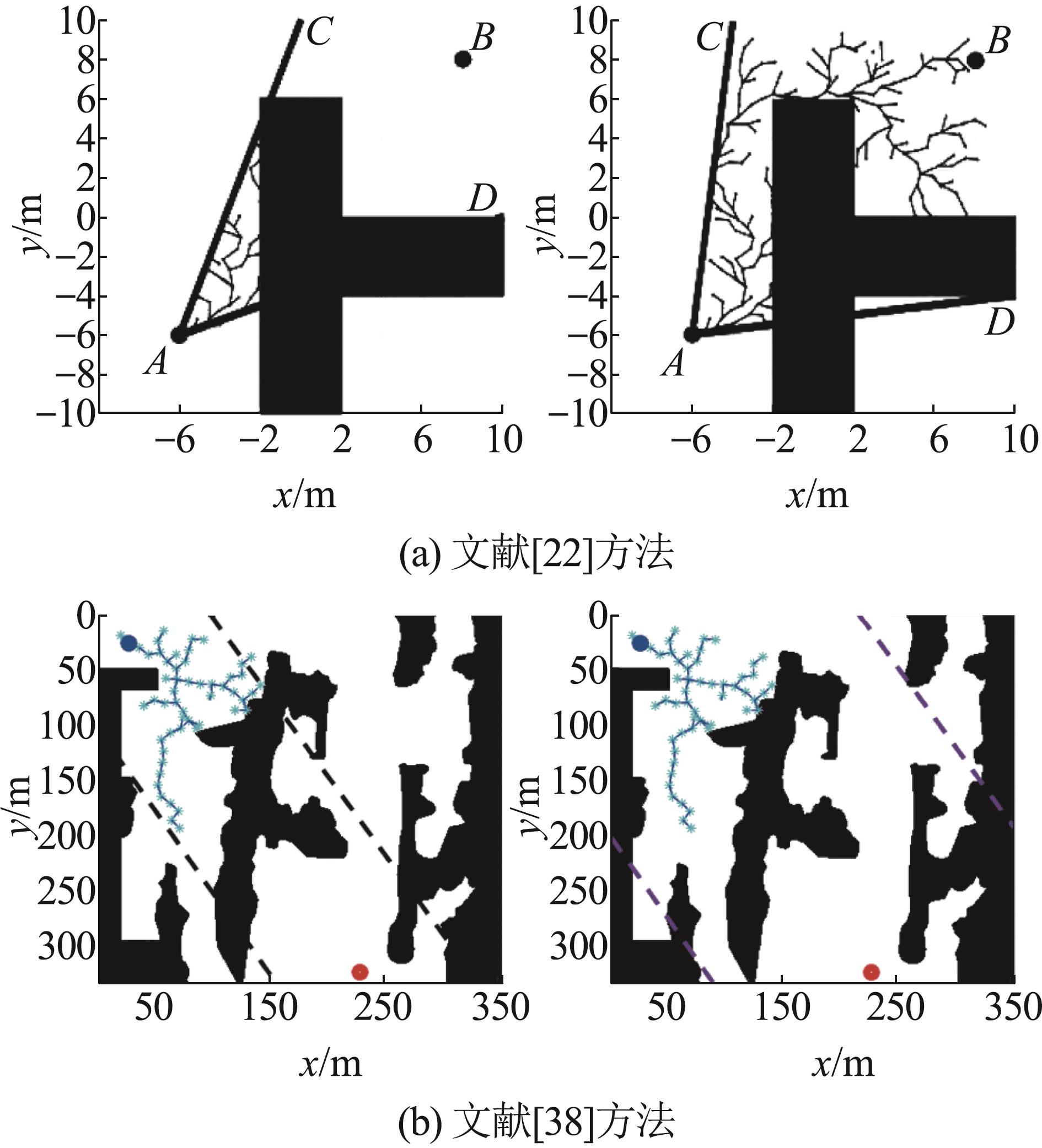

Fig. 10
Simulation results of limited sampling area
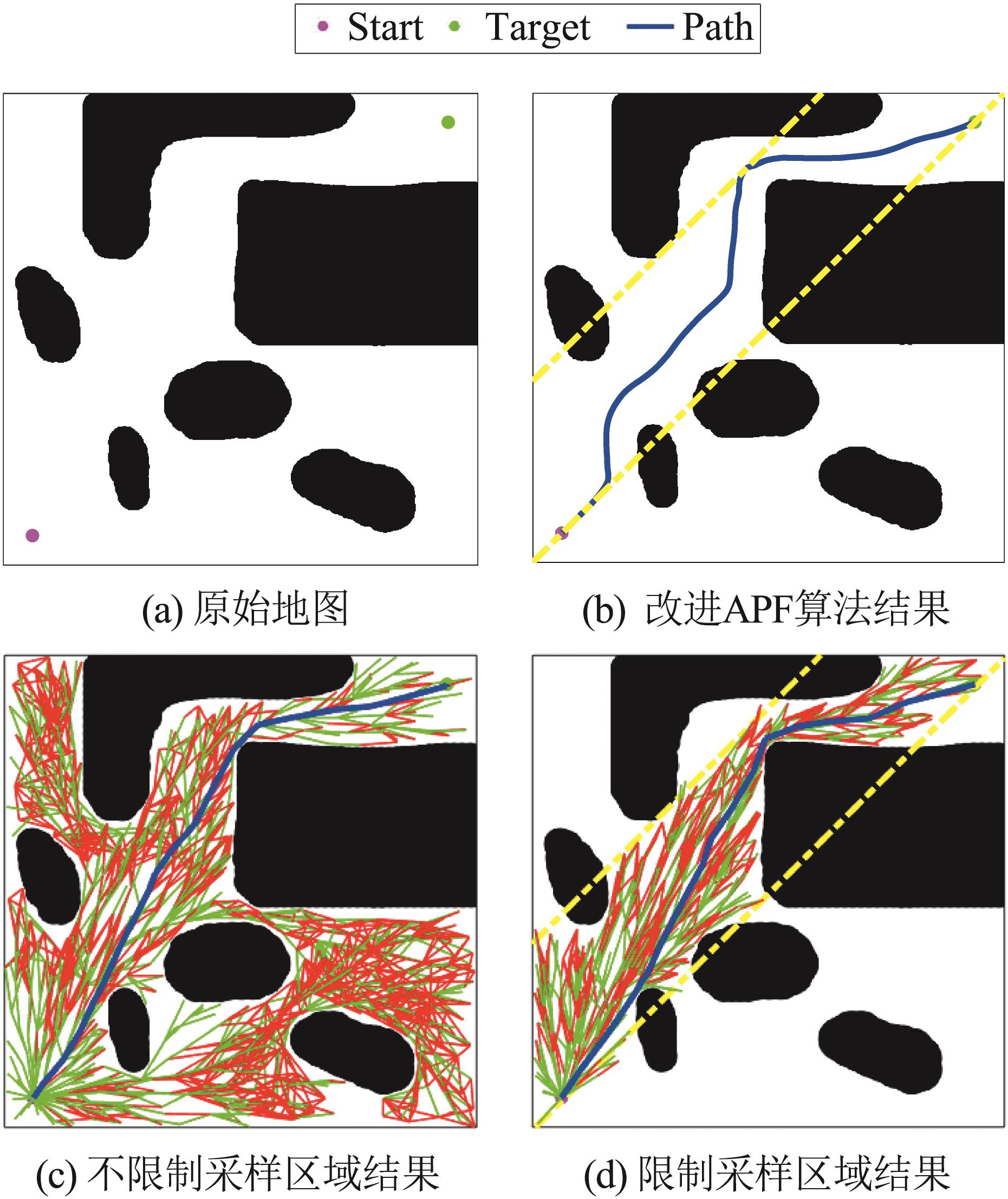
Table 1
Experimental data before and after RRT* algorithm improvement
| 算法 | 时间/s | 采样点数 | 路径代价 | 首次发现路径迭代次数 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | |
| RRT* | 54.07 | 50.91 | 53.18 | 1 166 | 1 097 | 1 082 | 1 071.6 | 1 060.8 | 1 065.3 | 1 026 | 521 | 788 |
| 改进RRT* | 22.83 | 20.53 | 21.60 | 559 | 540 | 552 | 1 070.5 | 1 063.3 | 1 067.2 | 648 | 347 | 493 |
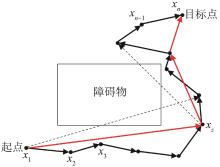
Fig. 11
Removal process of superfluous nodes
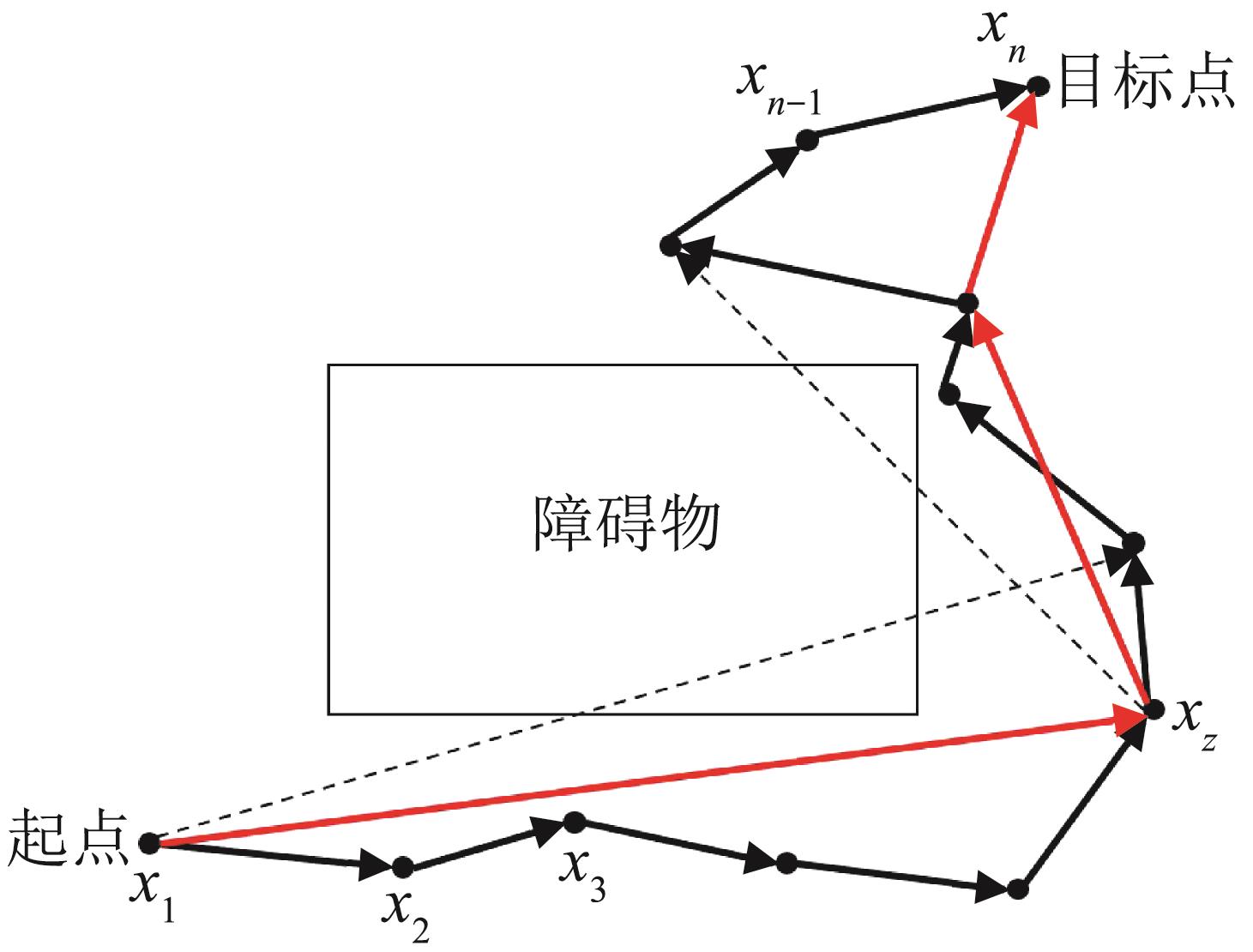
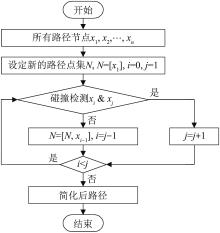
Fig. 12
Flowchart of path optimization algorithm
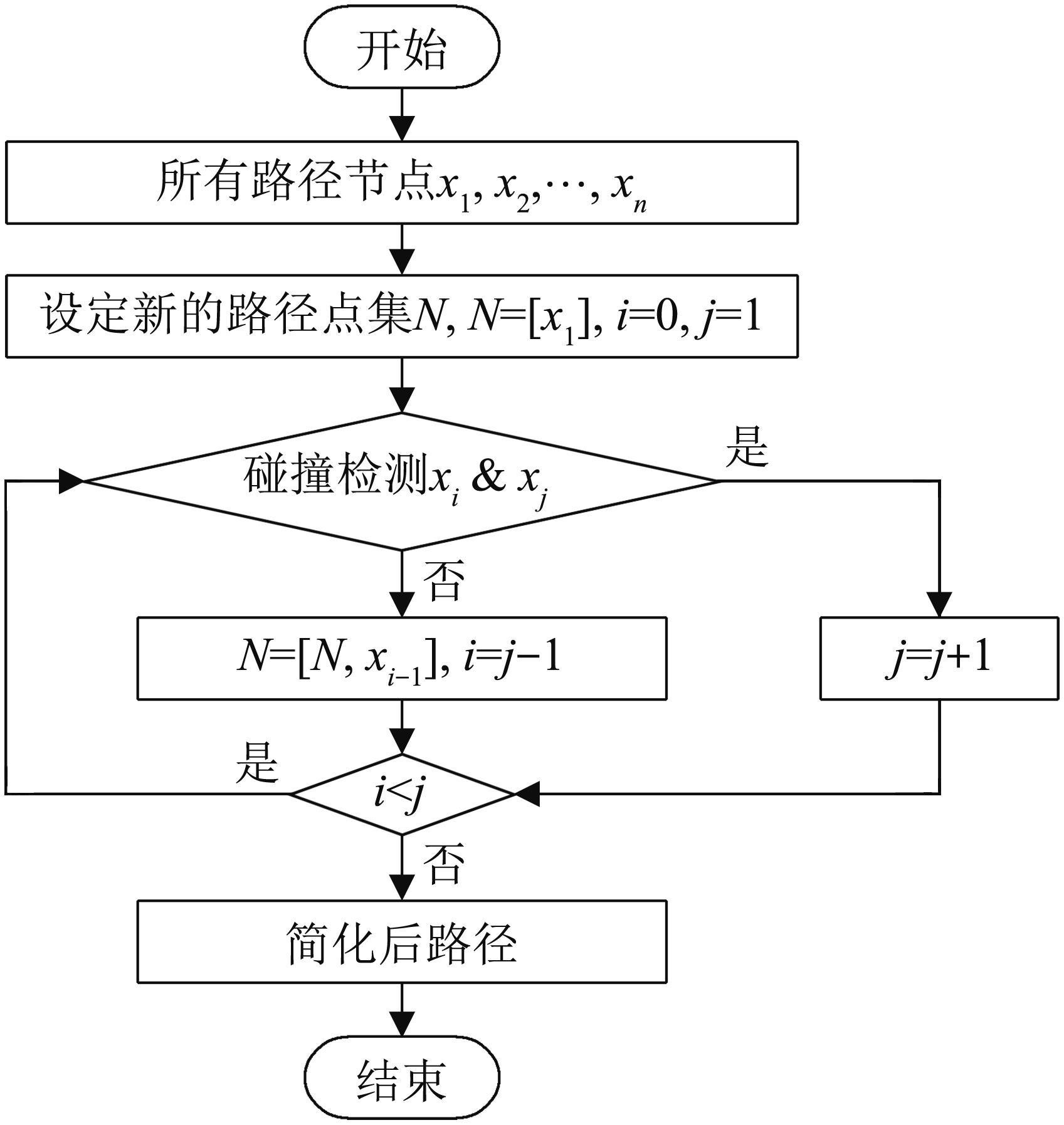
Fig. 13
Simulation experimental results of superfluous nodes remova
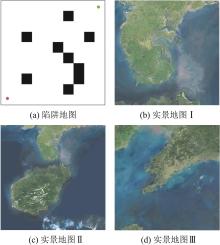
Fig. 14
Four maps
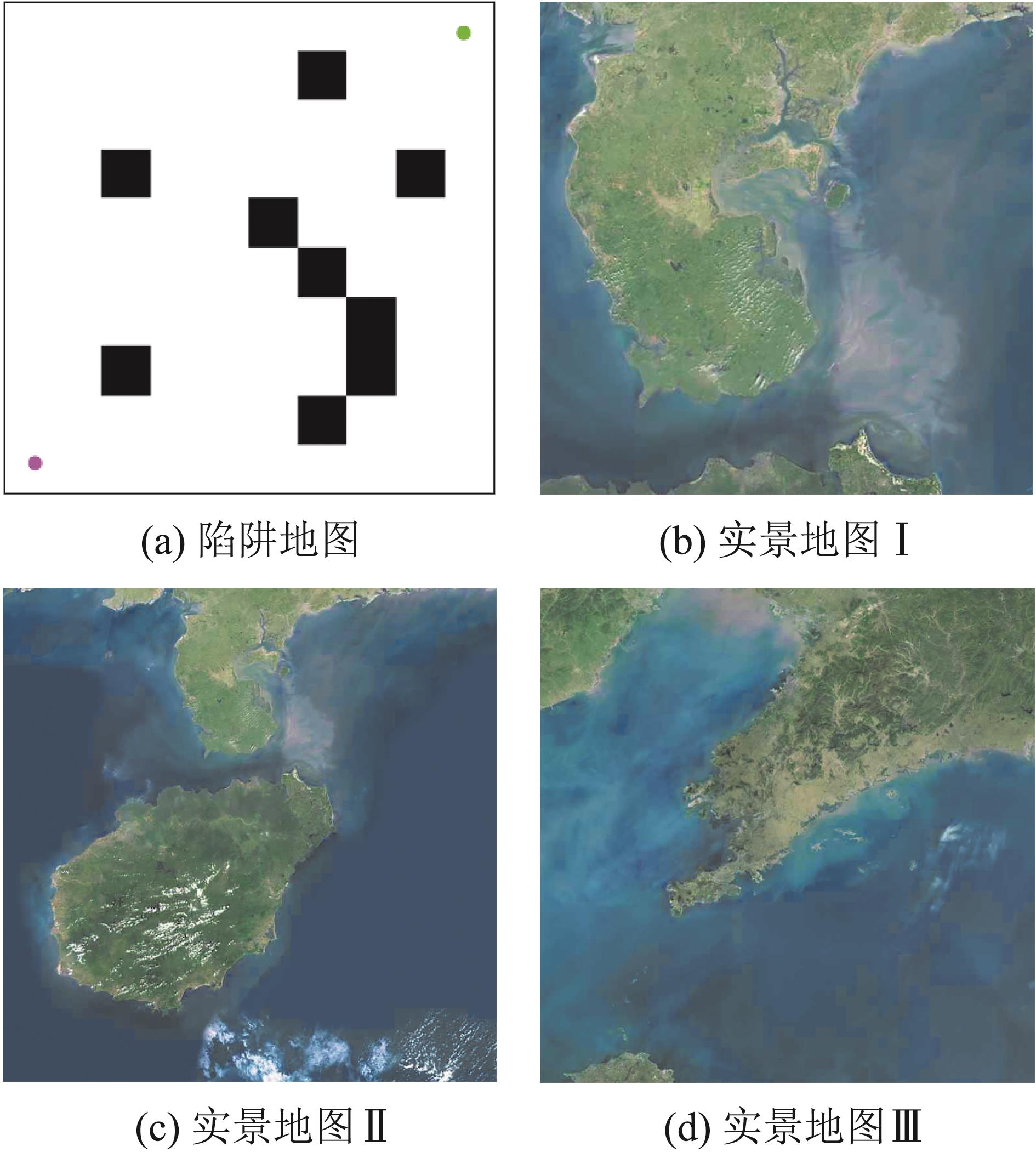

Fig. 15
Simulation experimental results in map1
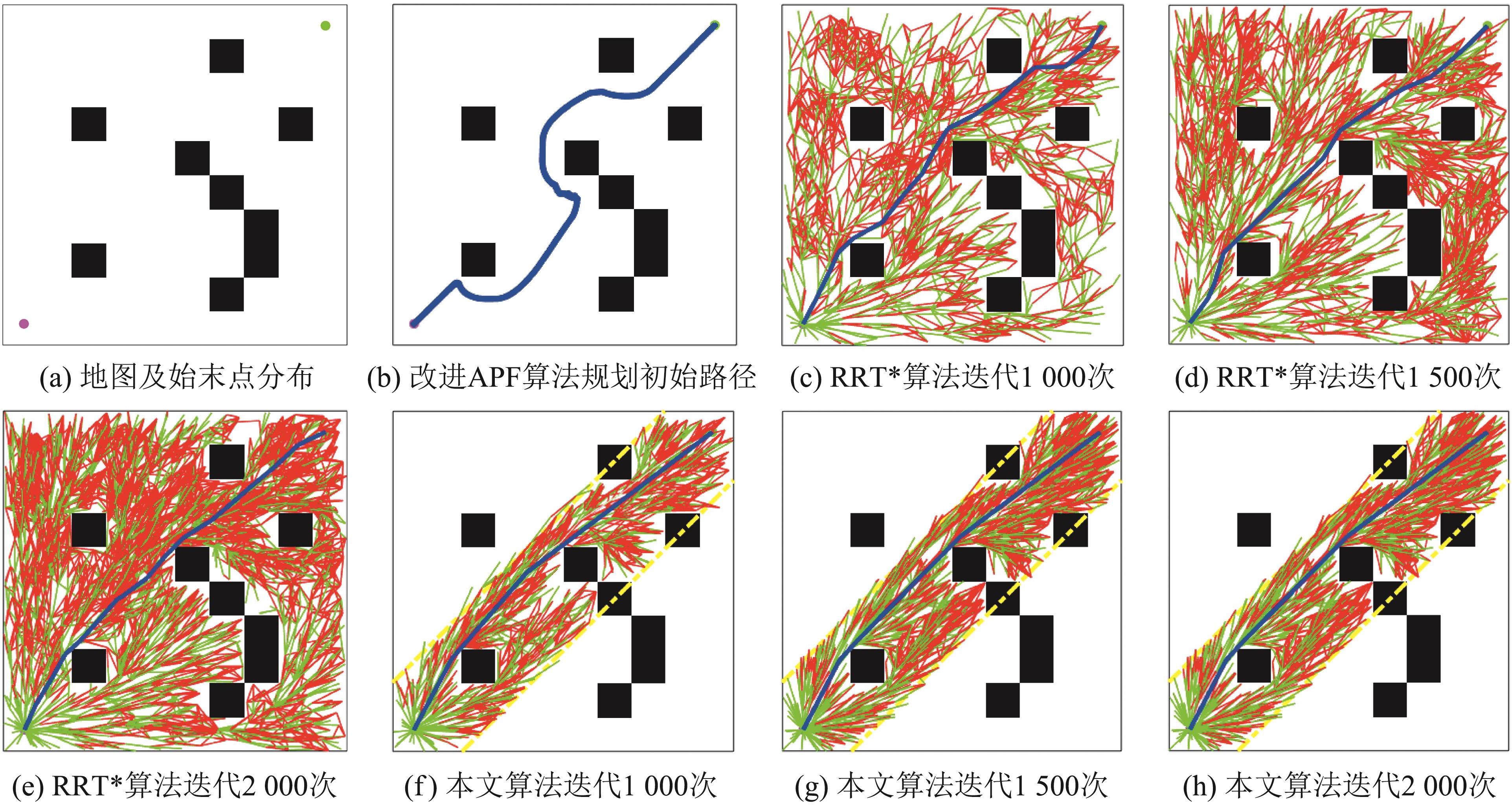
Table 2
Experimental data of three algorithms in simulation map
| 算法 | 迭代 次数 | 首次发现路径迭代次数 | 采样点数 | 时间/s | 路径代价 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | 最大 | 最小 | 平均 | ||
| 改进APF | / | / | / | / | / | / | / | 1.27 | 1.04 | 1.17 | 1 322.43 | 1 322.43 | 1 322.43 |
| RRT* | 1 000 | 634 | 349 | 472 | 852 | 817 | 834 | 28.40 | 24.40 | 26.47 | 1 136.75 | 1 014.58 | 1 050.35 |
| 1 500 | 1 089 | 433 | 728 | 1 279 | 1 195 | 1 250 | 68.90 | 55.70 | 63.95 | 1 018.83 | 1 003.37 | 1 012.56 | |
| 2 000 | 1 170 | 348 | 626 | 1 711 | 1 628 | 1 670 | 117.80 | 109.30 | 113.88 | 1 115.69 | 1 006.74 | 1 010.29 | |
| APF-RRT* | 1 000 | 239 | 395 | 320 | 739 | 678 | 704 | 26.80 | 34.60 | 30.61 | 1 005.69 | 1 002.84 | 1 003.78 |
| 1 500 | 569 | 277 | 384 | 1 102 | 983 | 1 060 | 68.79 | 50.50 | 57.81 | 1 003.00 | 1 002.35 | 1 002.78 | |
| 2 000 | 432 | 225 | 326 | 1 477 | 1 433 | 1 457 | 112.60 | 108.10 | 110.91 | 1 004.05 | 1 001.32 | 1 002.42 | |

Fig. 16
Results of three algorithm in real maps
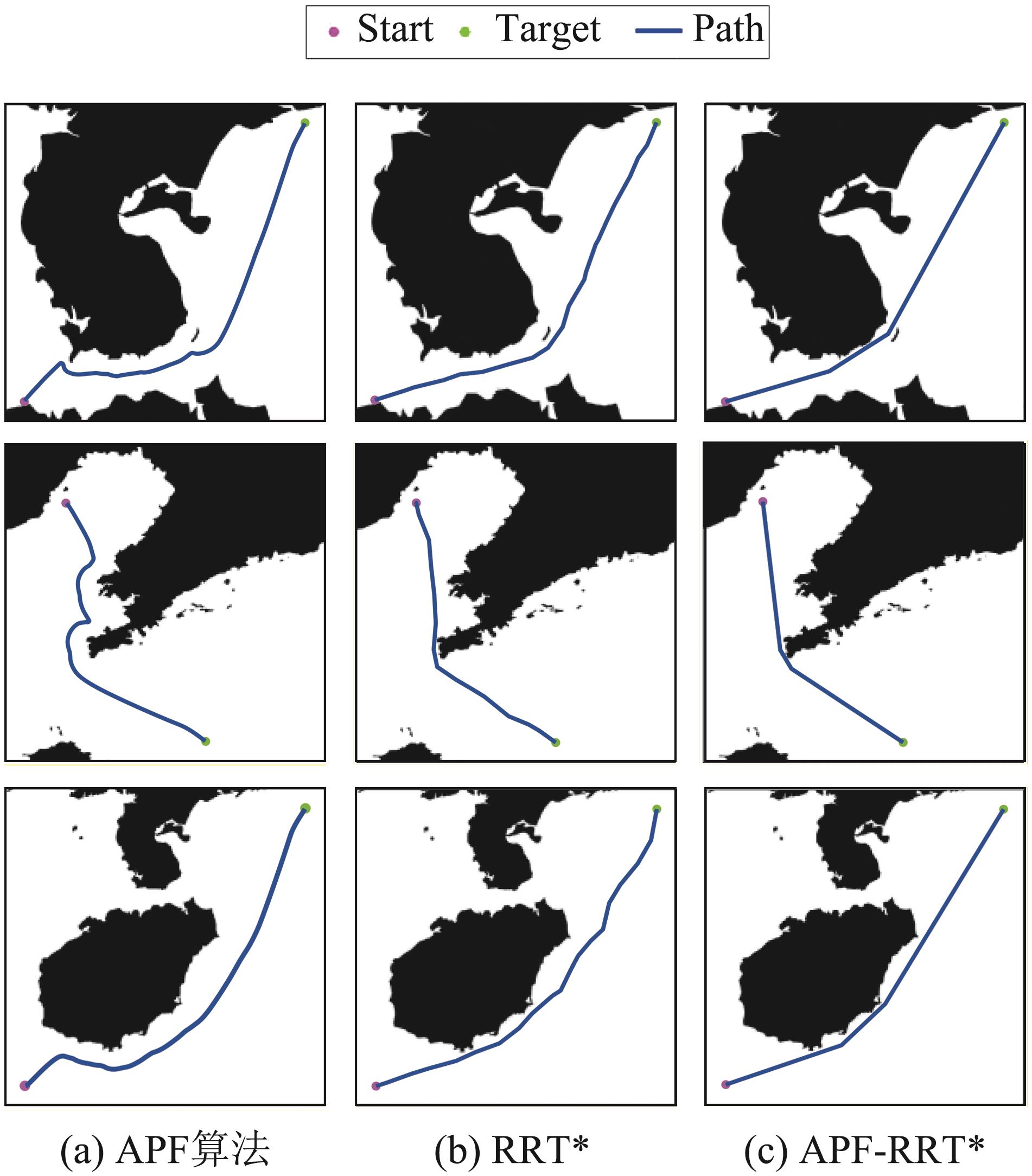
Table 3
Experimental data of three algorithms in real maps
| 地图 | 算法 | 迭代次数 | 时间/s | 采样点数 | 路径点数 | 路径 代价 |
|---|---|---|---|---|---|---|
| 实景I | 改进APF | / | 3.89 | / | / | 1 144.32 |
| RRT* | 2 000 | 41.13 | 1 019 | 22 | 1 085.62 | |
| APF-RRT* | 1 000 | 14.81 | 451 | 6 | 1 051.68 | |
| 实景II | 改进APF | / | 5.19 | / | / | 870.01 |
| RRT* | 2 000 | 81.17 | 1 197 | 16 | 768.04 | |
| APF-RRT* | 1 000 | 12.87 | 358 | 4 | 760.27 | |
| 实景III | 改进APF | / | 4.32 | / | / | 1 105.52 |
| RRT* | 2 000 | 95.03 | 1 309 | 21 | 1 046.20 | |
| APF-RRT* | 1 000 | 24.19 | 536 | 5 | 1 038.10 |
| 1 | Huang Yamin, Chen Linying, Chen Pengfei, et al. Ship Collision Avoidance Methods: State-of-the-art[J]. Safety Science, 2020, 121: 451-473. |
| 2 | Vagale Anete, Oucheikh Rachid, Bye Robin T, et al. Path Planning and Collision Avoidance for Autonomous Surface Vehicles I: A Review[J]. Journal of Marine Science and Technology, 2021, 26(4): 1292-1306. |
| 3 | Vagale Anete, Bye Robin T, Oucheikh Rachid, et al. Path Planning and Collision Avoidance for Autonomous Surface Vehicles II: A Comparative Study of Algorithms[J]. Journal of Marine Science and Technology, 2021, 26(4): 1307-1323. |
| 4 | Khatib O. Real-time Obstacle Avoidance for Manipulators and Mobile Robots[J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. |
| 5 | Naeem W, Henrique S C, Hu Liang. A Reactive COLREGs-compliant Navigation Strategy for Autonomous Maritime Navigation[J]. IFAC-PapersOnLine, 2016, 49(23): 207-213. |
| 6 | Yaguchi Yuichi, Tamagawa Kyota. A Waypoint Navigation Method with Collision Avoidance Using an Artificial Potential Method on Random Priority[J]. Artificial Life and Robotics, 2020, 25(2): 278-285. |
| 7 | Hongguang Lü, Yin Yong. COLREGS-constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields[J]. Journal of Navigation, 2019, 72(3), 72: 588-608. |
| 8 | Zhang Liang, Mou Junmin, Chen Pengfei, et al. Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods[J]. Journal of Marine Science and Engineering, 2021, 9(7): 761. |
| 9 | Li Lingyu, Wu Defeng, Huang Youqiang, et al. A Path Planning Strategy Unified with a COLREGS Collision Avoidance Function Based on Deep Reinforcement Learning and Artificial Potential Field[J]. Applied Ocean Research, 2021, 113: 102759. |
| 10 | LaValle S M. Rapidly-exploring Random Trees: A New Tool for Path Planning[J]. Research Report 9811, 1998. |
| 11 | Karaman S, Frazzoli E. Sampling-based Algorithms for Optimal Motion Planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 12 | LaValle S M. James J Kuffner Jr. Randomized Kinodynamic Planning[J]. The International Journal of Robotics Research, 2001, 20(5): 378-400. |
| 13 | J J Ir Kuffner, LaValle S M. RRT-connect: An Efficient Approach to Single-query Path Planning[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway, NJ, USA: IEEE, 2000: 995-1001. |
| 14 | Gammell Jonathan D, Srinivasa S S, Barfoot Timothy D. Informed RRT*: Optimal Sampling-based Path Planning Focused Via Direct Sampling of an Admissible Ellipsoidal Heuristic[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2014: 2997-3004. |
| 15 | Chiang H T L, Tapia L. COLREG-RRT: An RRT-based COLREGS-compliant Motion Planner for Surface Vehicle Navigation[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2024-2031. |
| 16 | Enevoldsen Thomas T, Galeazzi Roberto. Grounding-aware RRT⁎ for Path Planning and Safe Navigation of Marine Crafts in Confined Waters[J]. IFAC-PapersOnLine, 2021, 54(16): 195-201. |
| 17 | Zaccone Raphael, Martelli Michele. A Collision Avoidance Algorithm for Ship Guidance Applications[J]. Journal of Marine Engineering & Technology, 2020, 19(S1): 62-75. |
| 18 | Chen Xinjia, Liu Yanxia, Hong Xiaobin, et al. Unmanned Ship Path Planning Based on RRT[C]//Intelligent Computing Theories and Application. Cham: Springer International Publishing, 2018: 102-110. |
| 19 | Yuan Chengren, Liu Guifeng, Zhang Wenqun, et al. An Efficient RRT Cache Method in Dynamic Environments for Path Planning[J]. Robotics and Autonomous Systems, 2020, 131: 103595. |
| 20 | Taheri Ehsan, Mohammad Hossein Ferdowsi, Danesh Mohammad. Closed-loop Randomized Kinodynamic Path Planning for an Autonomous Underwater Vehicle[J]. Applied Ocean Research, 2019, 83: 48-64. |
| 21 | Tahir Zaid, Qureshi A H, Ayaz Yasar, et al. Potentially Guided Bidirectionalized RRT* for Fast Optimal Path Planning in Cluttered Environments[J]. Robotics and Autonomous Systems, 2018, 108: 13-27. |
| 22 | 裴以建, 杨超杰, 杨亮亮. 基于改进RRT*的移动机器人路径规划算法[J]. 计算机工程, 2019, 45(5): 285-290, 297. |
| Pei Yijian, Yang Chaojie, Yang Liangliang. Path Planning Algorithm for Mobile Robot Based on Improved RRT* [J]. Computer Engineering, 2019, 45(5): 285-290, 297. | |
| 23 | Wang Xinyu, Li Xiaojuan, Yong Guan, et al. Bidirectional Potential Guided RRT* for Motion Planning[J]. IEEE Access, 2019, 7: 95046-95057. |
| 24 | Xi Yingqi, Shen Wei, Zhang Wen, et al. A Real-time Dynamic Path Planning Method Combining Artificial Potential Field Method and Biased Target RRT Algorithm[J]. Journal of Physics: Conference Series, 2021, 1905(1): 012015. |
| 25 | Zhu Jia, Zhao Shili, Zhao Ran. Path Planning for Autonomous Underwater Vehicle Based on Artificial Potential Field and Modified RRT[C]//2021 International Conference on Computer, Control and Robotics (ICCCR). Piscataway, NJ, USA: IEEE, 2021: 21-25. |
| 26 | Huang Shunyu. Path Planning Based on Mixed Algorithm of RRT and Artificial Potential Field Method[C]//2021 4th International Conference on Intelligent Robotics and Control Engineering (IRCE). Piscataway, NJ, USA: IEEE, 2021: 149-155. |
| 27 | Tang Xiaoya, Chen Feng. Robot Path Planning Algorithm Based on Bi-RRT and Potential Field[C]//2020 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway, NJ, USA: IEEE, 2020: 1251-1256. |
| 28 | Lu Yafei, Wu Anping, Chen Qingyang, et al. An Improved UAV Path Planning Method Based on RRT-APF Hybrid Strategy[C]//2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE). Piscataway, NJ, USA: IEEE, 2020: 81-86. |
| 29 | An Hongrui, Hu Jiwei, Lou Ping. Obstacle Avoidance Path Planning Based on Improved APF and RRT[C]//2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE). Piscataway, NJ, USA: IEEE, 2021: 1028-1032. |
| 30 | Yuan Qingni, Yi Junhui, Sun Ruitong, et al. Path Planning of a Mechanical Arm Based on an Improved Artificial Potential Field and a Rapid Expansion Random Tree Hybrid Algorithm[J]. Algorithms, 2021, 14(11): 321. |
| 31 | Gammell Jonathan D, Srinivasa S S, Barfoot Timothy D. Batch Informed Trees (BIT*): Sampling-based Optimal Planning Via the Heuristically Guided Search of Implicit Random Geometric Graphs[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2015: 3067-3074. |
| 32 | Choudhury S, Gammell Jonathan D, Barfoot Timothy D, et al. Regionally Accelerated Batch Informed Trees (RABIT*): A Framework to Integrate Local Information into Optimal Path Planning[C]//2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2016: 4207-4214. |
| 33 | Sagar Suhas Joshi, Panagiotis Tsiotras. Non-parametric Informed Exploration for Sampling-based Motion Planning[C]//2019 International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2019: 5915-5921. |
| 34 | Thomas Thuesen Enevoldsen, Reinartz Christopher, Galeazzi Roberto. COLREGs-informed RRT* for Collision Avoidance of Marine Crafts[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2021: 8083-8089. |
| 35 | Li Chenming, Wang Chaoqun, Wang Jiankun, et al. Sliding-window Informed RRT*: A Method for Speeding up the Optimization and Path Smoothing[C]//2021 IEEE International Conference on Real-time Computing and Robotics (RCAR). Piscataway, NJ, USA: IEEE, 2021: 141-146. |
| 36 | Yi Daqing, Thakker R, Gulino C, et al. Generalizing Informed Sampling for Asymptotically-optimal Sampling-based Kinodynamic Planning Via Markov Chain Monte Carlo[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2018: 7063-7070. |
| 37 | Gustavo D O Véras Luiz, L L Medeiros Felipe, N F Guimaráes Lamartine. Systematic Literature Review of Sampling Process in Rapidly-exploring Random Trees[J]. IEEE Access, 2019, 7: 50933-50953. |
| 38 | 曹凯, 陈阳泉, 高嵩, 等. 涡流人工势场引导下的RRT*移动机器人路径规划[J]. 计算机科学与探索, 2021, 15(4): 723-732. |
| Cao Kai, Chen Yangquan, Gao Song, et al. Vortex Artificial-potential-field Guided RRT* for Path Planning of Mobile Robot[J]. Journal of Frontiers of Computer Science & Technology, 2021, 15(4): 723-732. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
