

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (11): 2956-2965.doi: 10.16182/j.issn1004731x.joss.24-0651
• Papers • Previous Articles
Yang Lanying1, Li Chao1, Zou Haifeng2, Wan Jiangtao1, Zhang Renqiang1, Liu Hui1, Lu Hong1
Received:2024-06-19
Revised:2024-09-02
Online:2025-11-18
Published:2025-11-27
CLC Number:
Yang Lanying, Li Chao, Zou Haifeng, Wan Jiangtao, Zhang Renqiang, Liu Hui, Lu Hong. Robot Path Planning Optimization Based on Fusion of Improved Ant Colony Algorithm and A* Algorithm[J]. Journal of System Simulation, 2025, 37(11): 2956-2965.
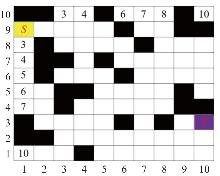
Fig. 1
Network environment model
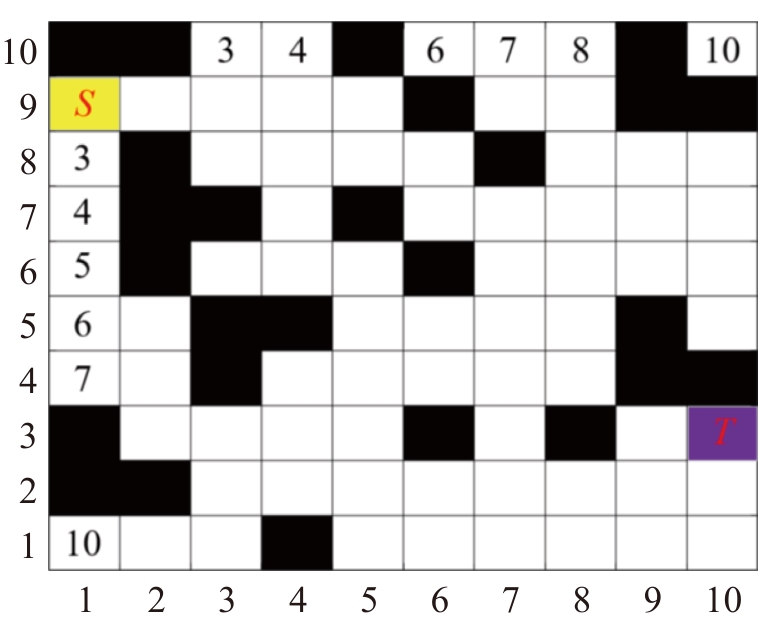

Fig. 2
Optional nodes for original ant colony algorithm
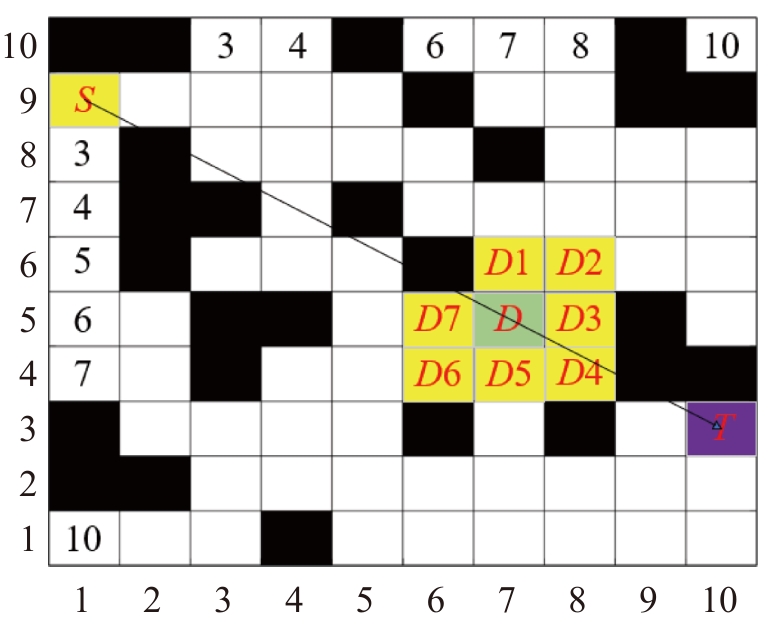

Fig. 3
Guidance direction mechanism
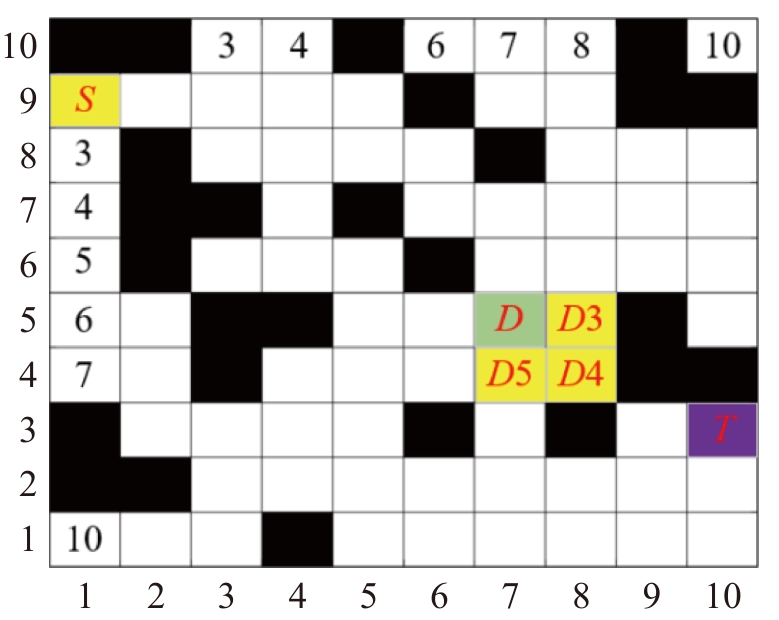

Fig. 4
Path-finding
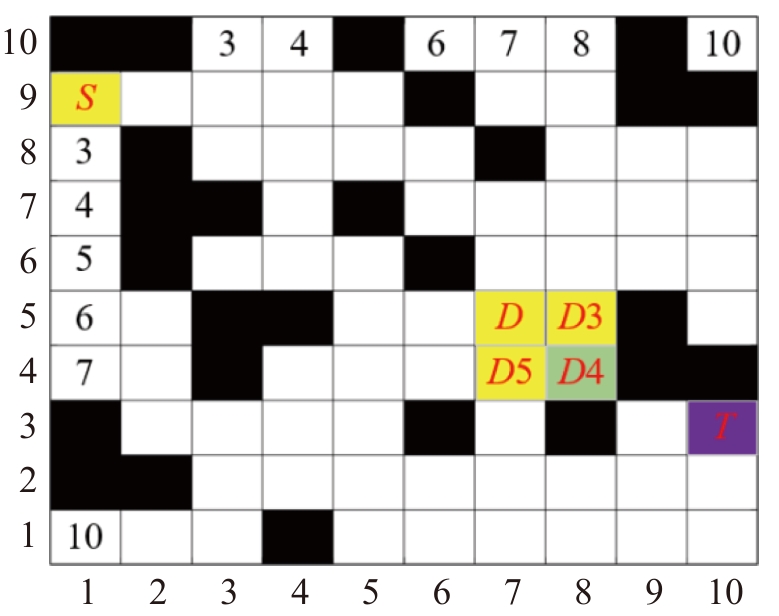

Fig. 5
Initial pheromone
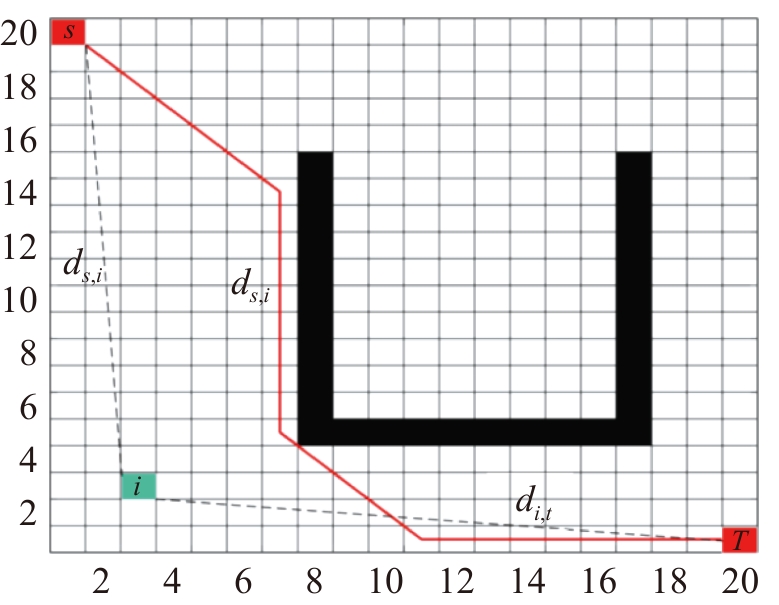

Fig. 6
Flow chart of adaptive path-finding ant colony algorithm
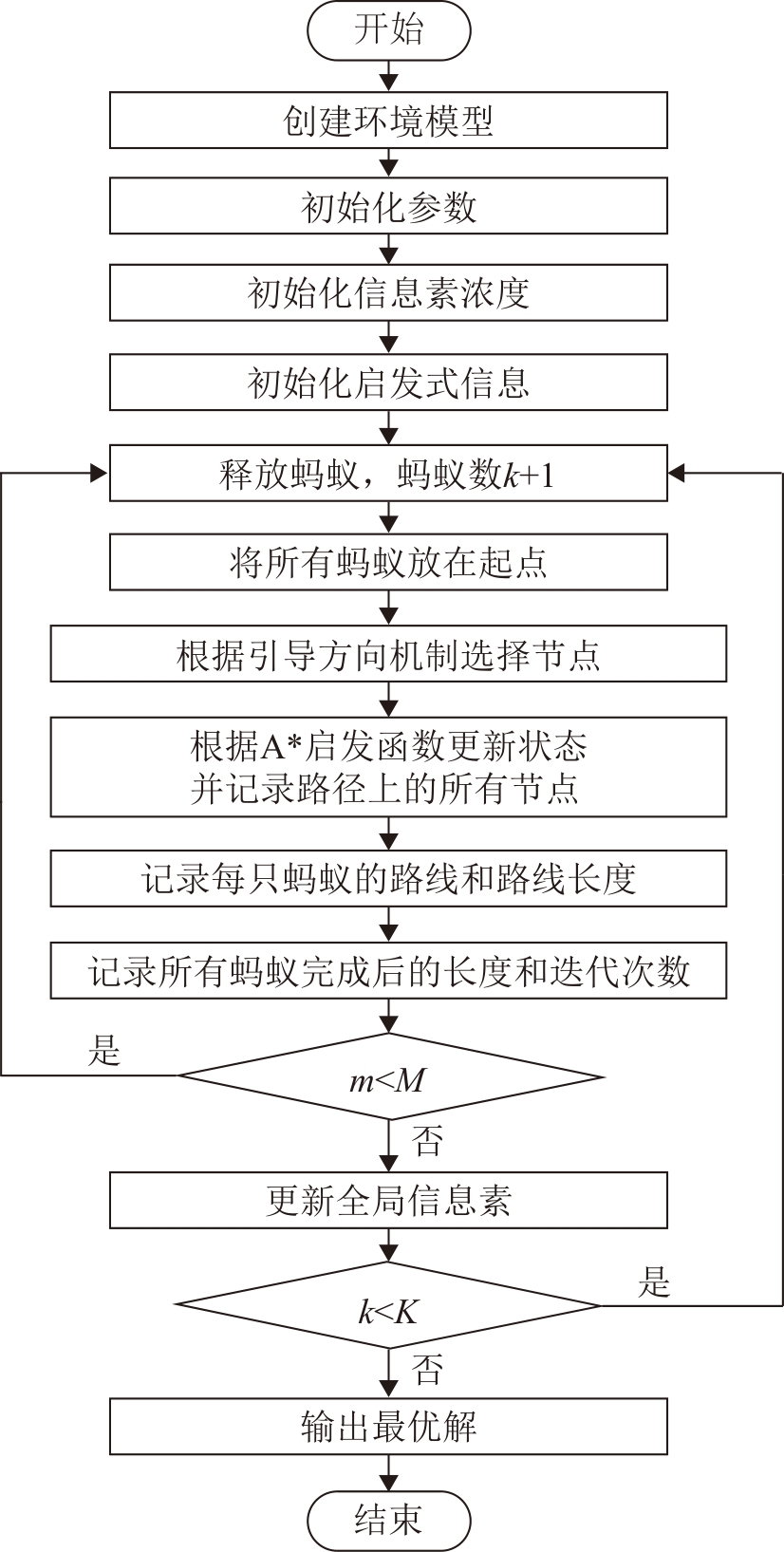

Fig. 7
Environmental mode


Fig. 8
Heuristic factors and path length
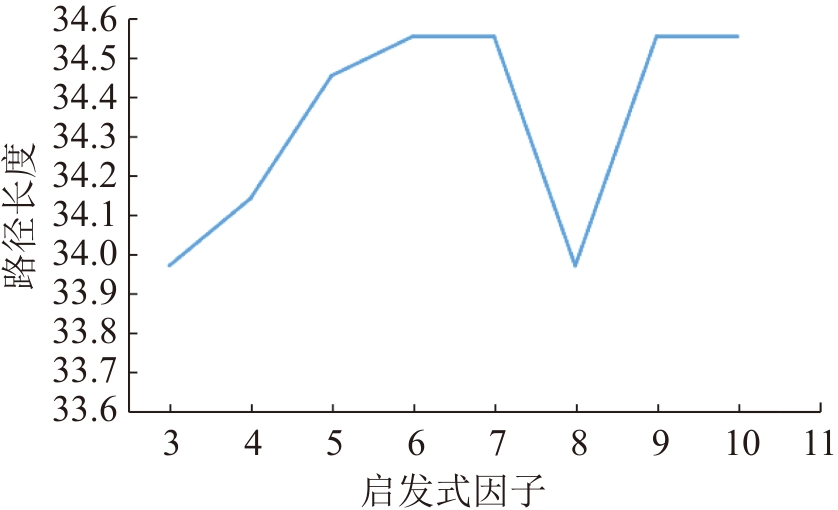
Table 1
Relationship between heuristic factors and path optimums
| 启发式因子 | 路径长度最优值 |
|---|---|
| 3 | 33.970 5 |
| 4 | 34.142 1 |
| 5 | 34.456 2 |
| 6 | 34.556 3 |
| 7 | 34.556 3 |
| 8 | 33.970 5 |
| 9 | 34.556 3 |
| 10 | 34.556 3 |
Table 2
Relationship between pheromone factor and path optimal value
| 信息素因子 | 路径长度最优值 |
|---|---|
| 2 | 34.556 3 |
| 3 | 34.556 3 |
| 4 | 34.556 3 |
| 5 | 33.970 6 |
| 6 | 33.970 5 |
| 7 | 34.556 3 |
| 8 | 34.556 3 |
| 9 | 34.556 3 |

Fig. 9
Pheromone factor and path length
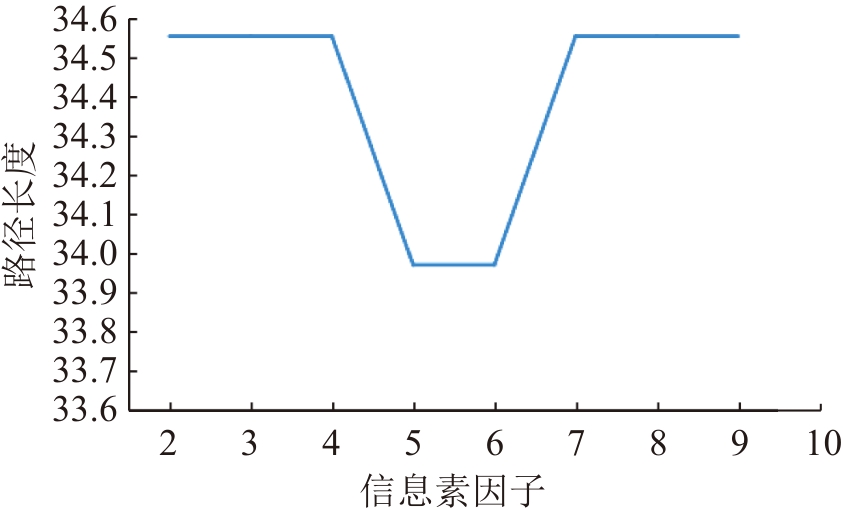
Table 3
Relationship between pheromone evaporation factor and path optimum
| 信息素蒸发因子 | 路径长度最优值 |
|---|---|
| 0.1 | 33.970 6 |
| 0.2 | 33.970 5 |
| 0.3 | 34.556 3 |
| 0.4 | 34.556 3 |
| 0.5 | 34.556 3 |
| 0.6 | 34.556 3 |

Fig. 10
Pheromone evaporation factor and path length
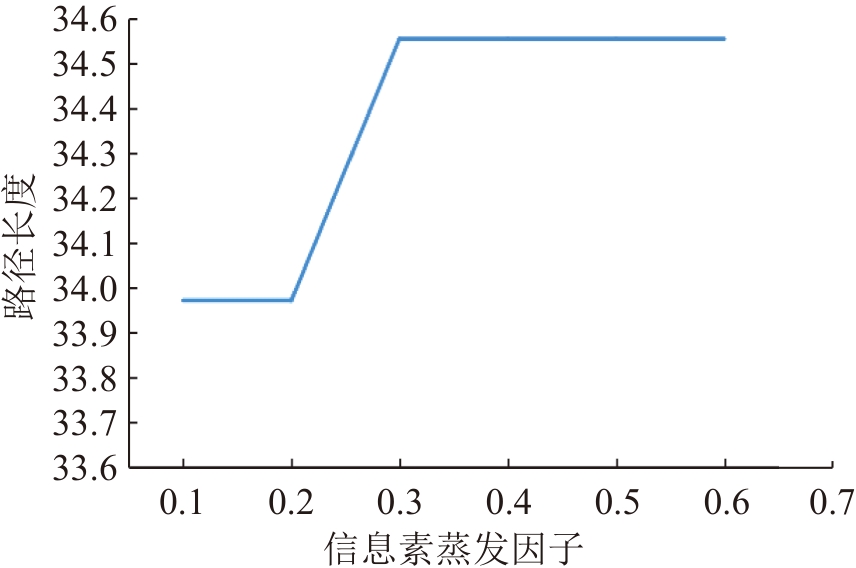
Table 4
Relationship table of experimental data of environmental modelsII and III
| 因子 | 环境模型II | 环境模型III | |||
|---|---|---|---|---|---|
| 路径长度最优值 | 10次路径平均值 | 路径长度最优值 | 10次路径平均值 | ||
| 启发式 | 3 | 29.799 0 | 31.716 16 | 75.639 6 | 75.639 60 |
| 4 | 29.799 0 | 31.609 06 | 73.982 8 | 75.469 78 | |
| 5 | 29.799 0 | 31.964 68 | 74.811 2 | 75.283 98 | |
| 6 | 29.799 0 | 31.136 28 | 73.982 8 | 74.755 58 | |
| 7 | 29.799 0 | 31.219 12 | 73.982 8 | 74.986 94 | |
| 8 | 29.799 0 | 30.970 60 | 73.982 8 | 74.621 26 | |
| 9 | 29.799 0 | 31.633 32 | 73.982 8 | 74.621 26 | |
| 10 | 29.799 0 | 31.467 64 | 73.982 8 | 74.562 68 | |
| 信息素 | 2 | 29.799 0 | 30.970 60 | 73.982 8 | 74.065 64 |
| 3 | 29.799 0 | 31.750 48 | 73.982 8 | 74.397 00 | |
| 4 | 29.799 0 | 31.219 12 | 73.982 8 | 74.314 16 | |
| 5 | 29.799 0 | 31.219 12 | 73.982 8 | 74.821 26 | |
| 6 | 29.799 0 | 31.219 12 | 73.982 8 | 74.065 64 | |
| 7 | 29.799 0 | 32.296 04 | 73.982 8 | 74.621 26 | |
| 8 | 29.799 0 | 32.520 30 | 73.982 8 | 74.231 32 | |
| 信息素蒸发 | 0.1 | 29.799 0 | 31.219 12 | 73.982 8 | 74.065 64 |
| 0.2 | 29.799 0 | 31.053 44 | 73.982 8 | 74.065 64 | |
| 0.3 | 29.799 0 | 31.550 48 | 73.982 8 | 74.645 52 | |
| 0.4 | 29.799 0 | 32.851 67 | 73.982 8 | 74.597 00 | |
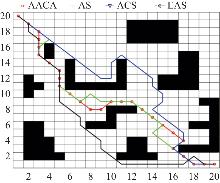
Fig. 11
Path planning diagram of each algorithm in environment Ⅱ
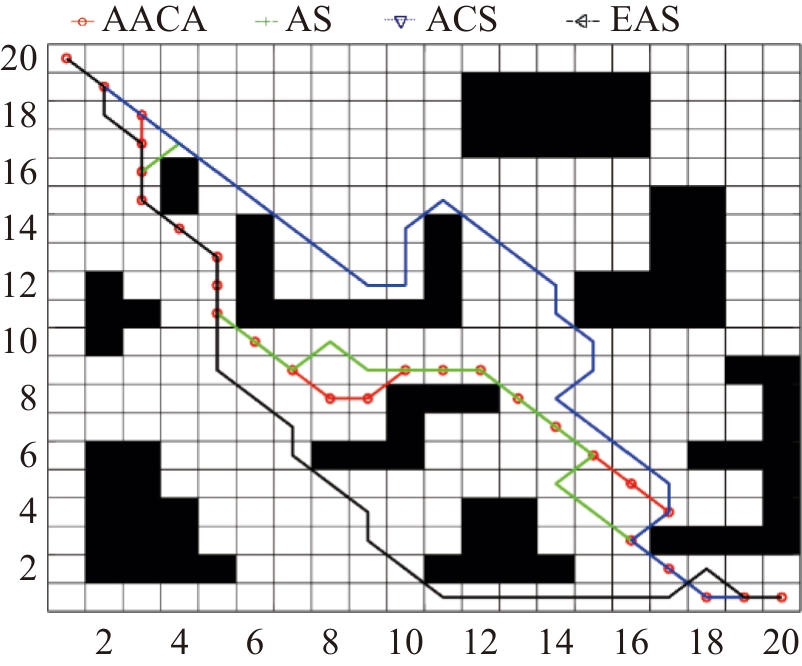
Fig. 12
Number of iterations and path length in environment Ⅱ
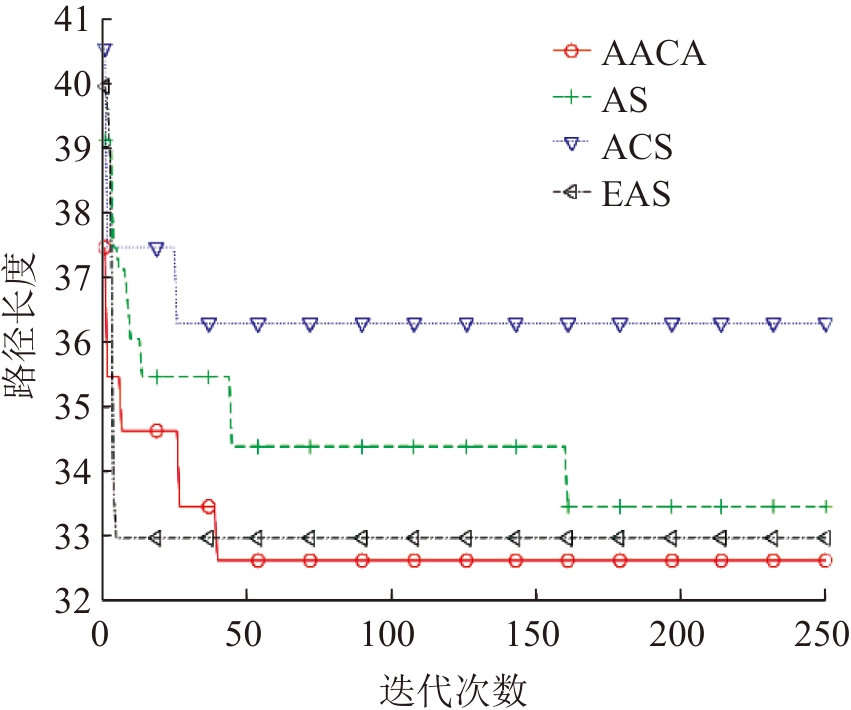
Table 5
Comparison of the performance of each algorithm in environment Ⅱ
| 性能指标 | AACA | AS | ACS | EAS |
|---|---|---|---|---|
| 最优值 | 30.971 0 | 32.971 0 | 34.870 0 | 31.799 0 |
| 最优值次数 | 4 | 1 | 3 | 1 |
| 平均值 | 32.602 2 | 33.427 6 | 35.435 6 | 33.799 2 |
| 最大值 | 32.627 4 | 34.042 0 | 36.284 0 | 35.799 0 |
| 转弯次数 | 11 | 12 | 13 | 13 |
| 运行时间/s | 20 | 38 | 49 | 46 |

Fig. 13
Path planning diagram of each algorithm in environment Ⅲ
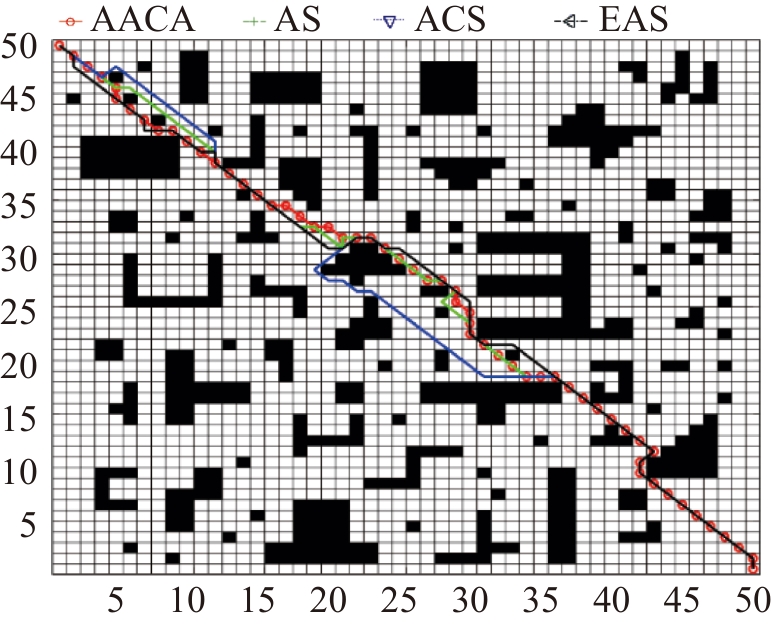

Fig. 14
Path planning of each algorithm in environment Ⅲ
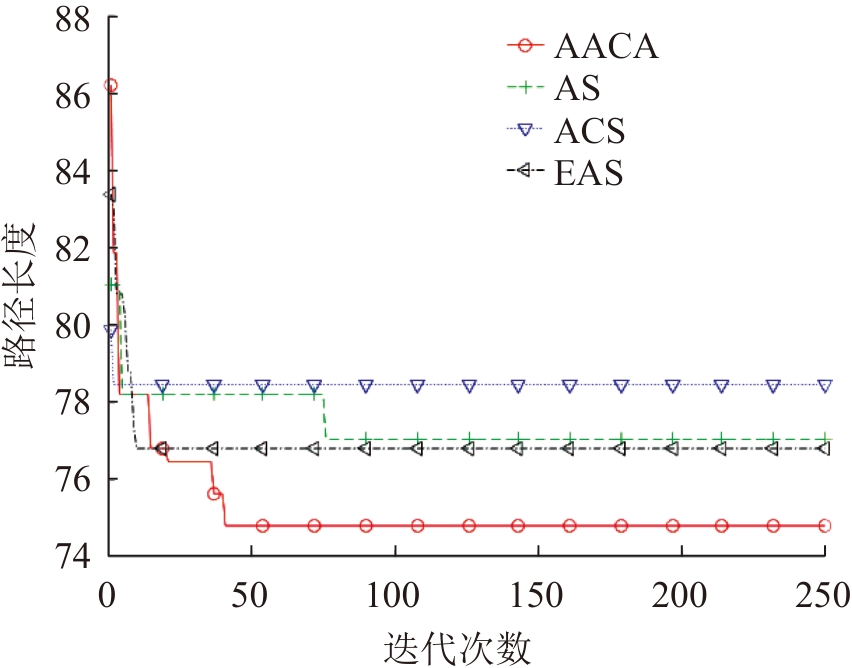
Table 6
Comparison of the performance of each algorithm in environment Ⅲ
| 性能指标 | AACA | AS | ACS | EAS |
|---|---|---|---|---|
| 最优值 | 73.098 0 | 76.225 0 | 76.225 0 | 76.468 0 |
| 最优值次数 | 4 | 1 | 1 | 1 |
| 平均值 | 74.148 0 | 76.888 2 | 77.453 8 | 76.908 2 |
| 最大值 | 74.811 0 | 77.054 0 | 78.468 0 | 77.397 0 |
| 转弯次数 | 19 | 26 | 20 | 20 |
| 运行时间/s | 327 | 446 | 2 933 | 2 634 |
| [1] | Liu Lixing, Wang Xu, Yang Xin, et al. Path Planning Techniques for Mobile Robots: Review and Prospect[J]. Expert Systems with Applications, 2023, 227: 120254. |
| [2] | Shen Zhipeng, Ding Wenna, Liu Yuchen, et al. Path Planning Optimization for Unmanned Sailboat in Complex Marine Environment[J]. Ocean Engineering, 2023, 269: 113475. |
| [3] | Yonetani Ryo, Taniai Tatsunori, Barekatain Mohammadamin, et al. Path Planning Using Neural A* Search[C]//Proceedings of the 38th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2021: 12029-12039. |
| [4] | Luo Min, Hou Xiaorong, Yang Jing. Surface Optimal Path Planning Using an Extended Dijkstra Algorithm[J]. IEEE Access, 2020, 8: 147827-147838. |
| [5] | Zhang Yi, Pang Dashuai. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[C]//2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC). Piscataway: IEEE, 2022: 558-563. |
| [6] | Dorigo M, Maniezzo V, Colorni A. Ant System: Optimization by a Colony of Cooperating Agents[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 1996, 26(1): 29-41. |
| [7] | Yang Bing, Wu Lunwen, Xiong Jian, et al. Location and Path Planning for Urban Emergency Rescue by a Hybrid Clustering and Ant Colony Algorithm Approach[J]. Applied Soft Computing, 2023, 147: 110783. |
| [8] | Liu Chao, Wu Lei, Xiao Wensheng, et al. An Improved Heuristic Mechanism Ant Colony Optimization Algorithm for Solving Path Planning[J]. Knowledge-Based Systems, 2023, 271: 110540. |
| [9] | Li Mingze, Li Bing, Qi Zhigang, et al. Optimized APF-ACO Algorithm for Ship Collision Avoidance and Path Planning[J]. Journal of Marine Science and Engineering, 2023, 11(6): 1177. |
| [10] | Fatemidokht Hamideh, Marjan Kuchaki Rafsanjani. F-ant: An Effective Routing Protocol for Ant Colony Optimization Based on Fuzzy Logic in Vehicular Ad Hoc Networks[J]. Neural Computing and Applications, 2018, 29(11): 1127-1137. |
| [11] | 王晓燕, 杨乐, 张宇, 等. 基于改进势场蚁群算法的机器人路径规划[J]. 控制与决策, 2018, 33(10): 1775-1781. |
| Wang Xiaoyan, Yang Le, Zhang Yu, et al. Robot Path Planning Based on Improved Ant Colony Algorithm with Potential Field Heuristic[J]. Control and Decision, 2018, 33(10): 1775-1781. | |
| [12] | Miao Changwei, Chen Guangzhu, Yan Chengliang, et al. Path Planning Optimization of Indoor Mobile Robot Based on Adaptive Ant Colony Algorithm[J]. Computers & Industrial Engineering, 2021, 156: 107230. |
| [13] | 李祥祥, 胡甫才, 刘畅, 等. 基于改进精英势场蚁群算法的机器人三维路径规划算法研究[J]. 计算机科学与应用, 2021, 11(4): 849-858 |
| Li Xiangxiang, Hu Fuchai, Liu Chang, et al. Robot 3D Path Planning Algorithm Based on Improved Elitist Potential Field Ant Colony Algorithm[J]. Computer Science and Application, 2021, 11(4): 849-858. | |
| [14] | Tao Yong, Gao He, Ren Fan, et al. A Mobile Service Robot Global Path Planning Method Based on Ant Colony Optimization and Fuzzy Control[J]. Applied Sciences, 2021, 11(8): 3605. |
| [15] | Wei Z Q, Xu F, Jin Y Q. Phase Unwrapping for SAR Interferometry Based on an Ant Colony Optimization Algorithm[J]. International Journal of Remote Sensing, 2008, 29(3): 711-725. |
| [16] | 万晓凤, 胡伟, 方武义, 等. 基于改进蚁群算法的机器人路径规划研究[J]. 计算机工程与应用, 2014, 50(18): 63-66. |
| Wan Xiaofeng, Hu Wei, Fang Wuyi, et al. Research on Path Planning of Robot Based on Improved Ant Colony Algorithm[J]. Computer Engineering and Applications, 2014, 50(18): 63-66. | |
| [17] | Xiong Ni, Zhou Xinzhi, Yang Xiuqing, et al. Mobile Robot Path Planning Based on Time Taboo Ant Colony Optimization in Dynamic Environment[J]. Frontiers in Neurorobotics, 2021, 15: 642733. |
| [18] | Pei Zuan, Wei Yufeng. Prediction of the Bond Strength of FRP-to-concrete Under Direct Tension by ACO-based ANFIS Approach[J]. Composite Structures, 2022, 282: 115070. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [15] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
