

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (11): 2888-2903.doi: 10.16182/j.issn1004731x.joss.24-0622
• Papers • Previous Articles Next Articles
Chen Jitong1, Zhou Jiajia1, Wu Di2, Jiang Hailong3
Received:2024-06-11
Revised:2024-08-05
Online:2025-11-18
Published:2025-11-27
Contact:
Zhou Jiajia
CLC Number:
Chen Jitong, Zhou Jiajia, Wu Di, Jiang Hailong. A USV Path Planning Algorithm under Special Environment Based on TD3-RRT[J]. Journal of System Simulation, 2025, 37(11): 2888-2903.
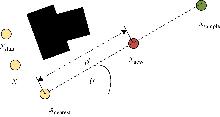
Fig. 1
Principle of RRT algorithm
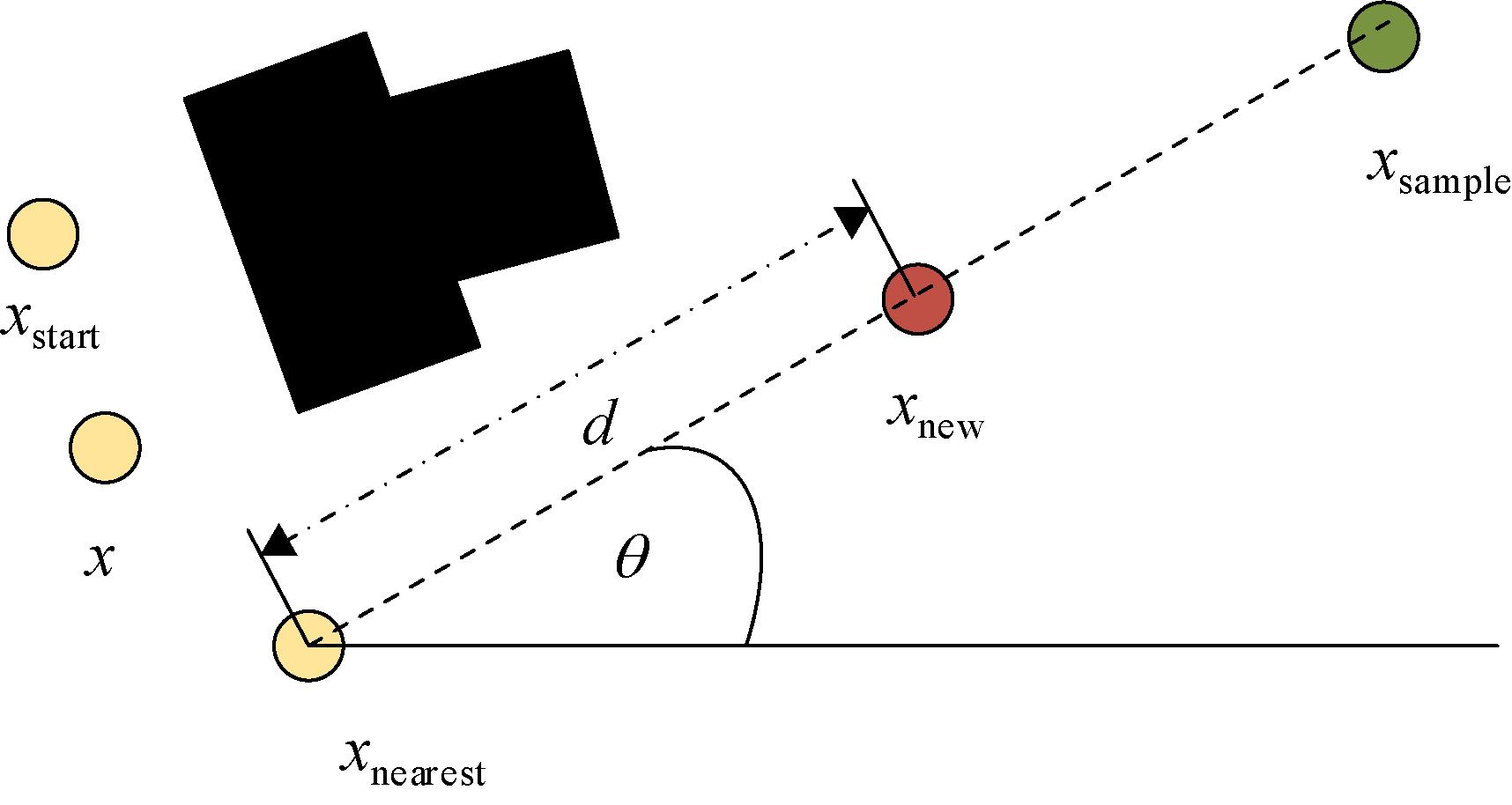
Fig. 2
TD3 algorithm network structure
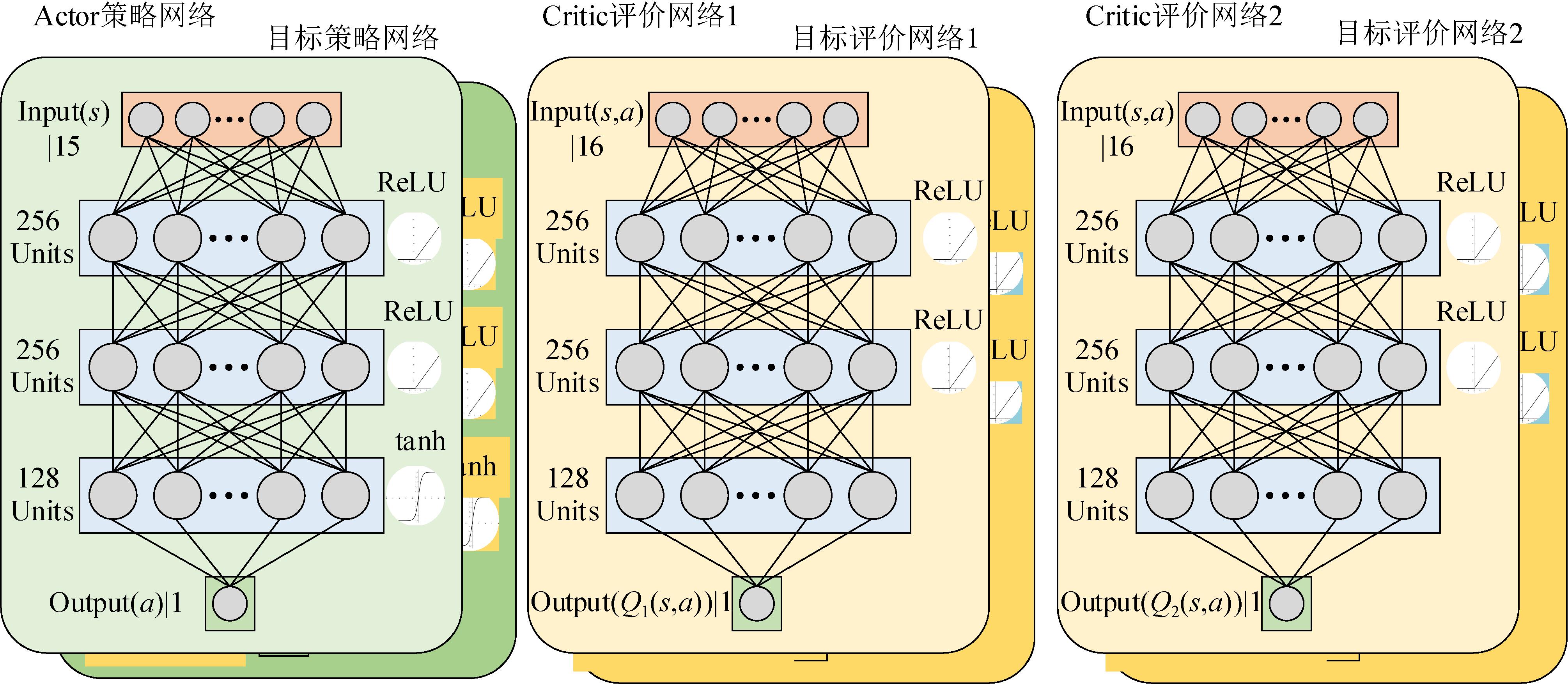
Fig. 3
Improved experience replay
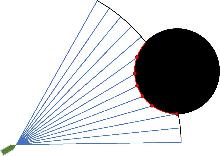
Fig. 4
Forward looking detection area
Fig. 5
Angle reward
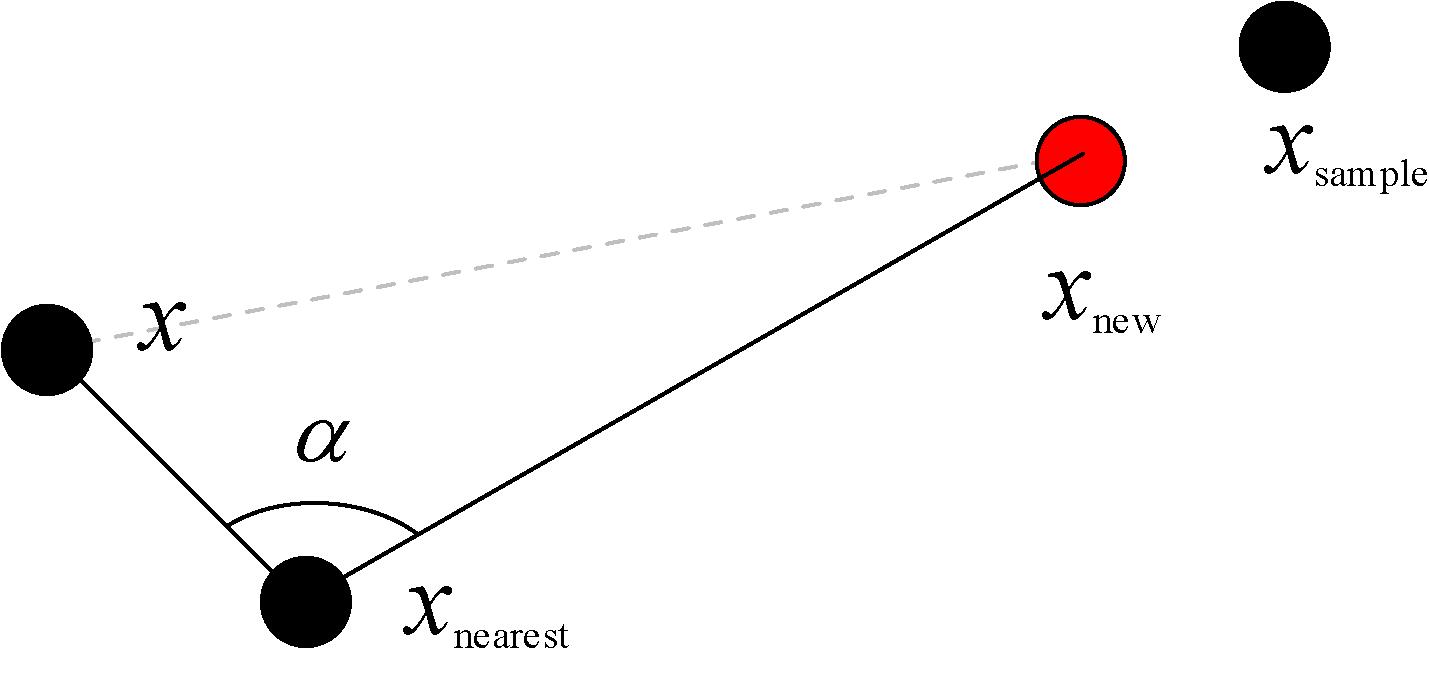
Fig. 6
Flowchart of TD3-RRT algorithm
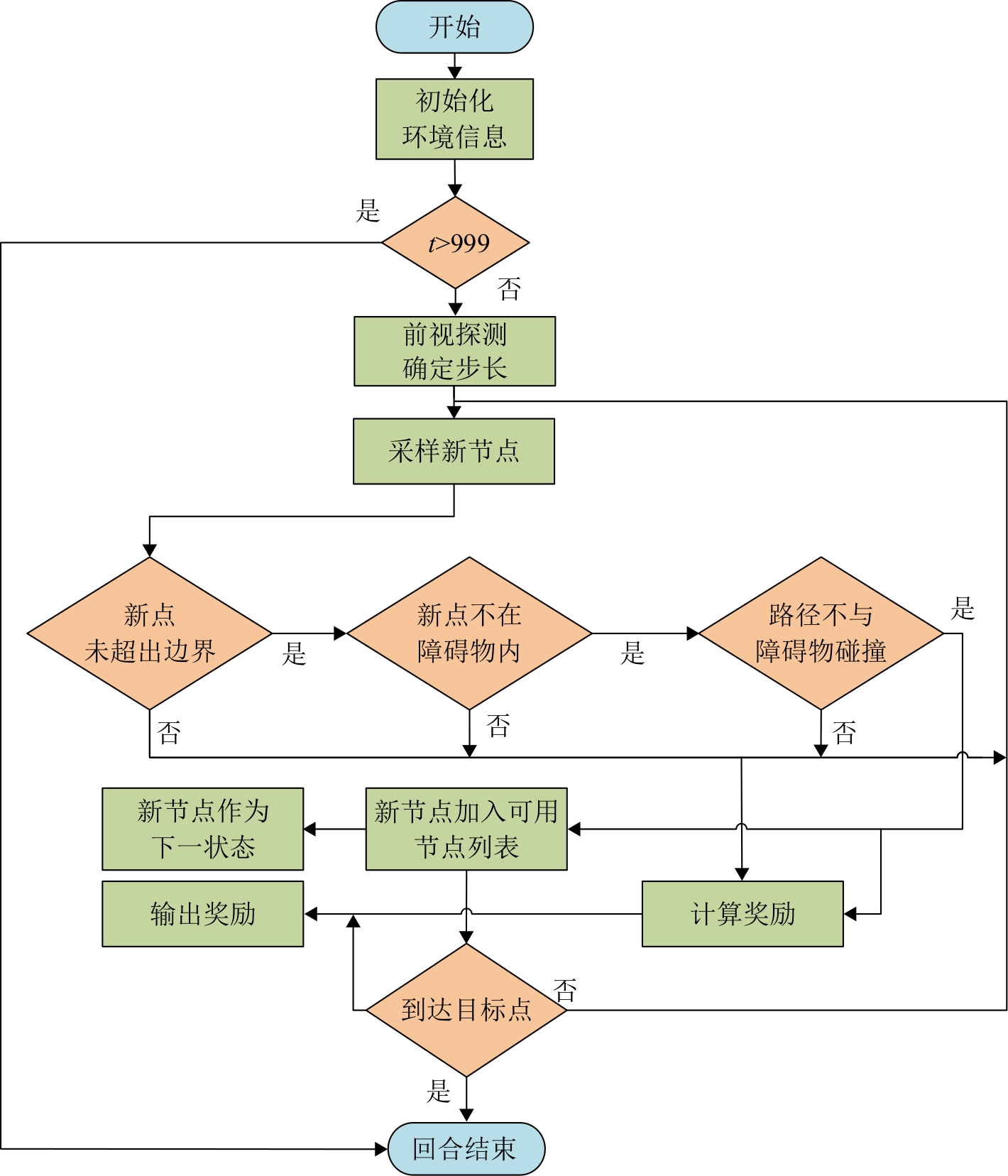
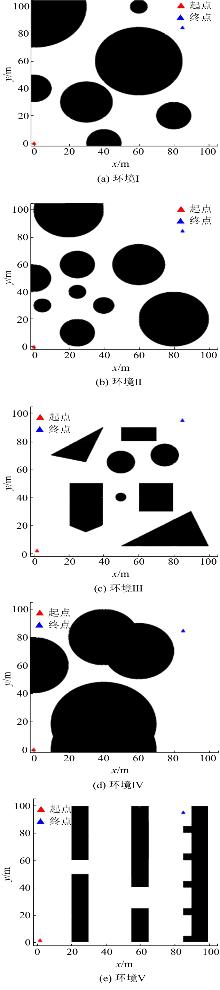
Fig. 7
Contrast experiment environment
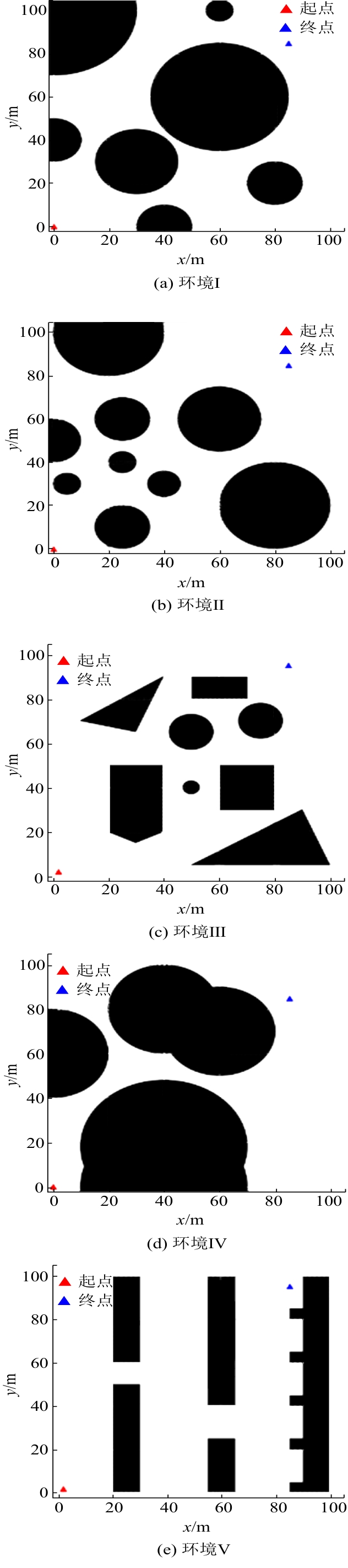
Table 1
TD3-RRT hyperparameter setting
| 超参数 | 值 |
|---|---|
| 折扣因子 | 0.99 |
| 学习率 | 0.000 3 |
| 软更新参数 | 0.005 |
| 经验池容量 | 106 |
| 批容量 | 512 |
| 策略网络更新频率 | 2 |
| 训练回合数 | 2 000 |
| 训练最大步数 | 1 000 |
| 测试最大步数 | 500 |
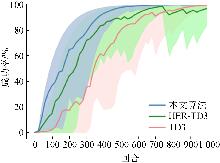
Fig. 8
Comparison of methods for experience replay
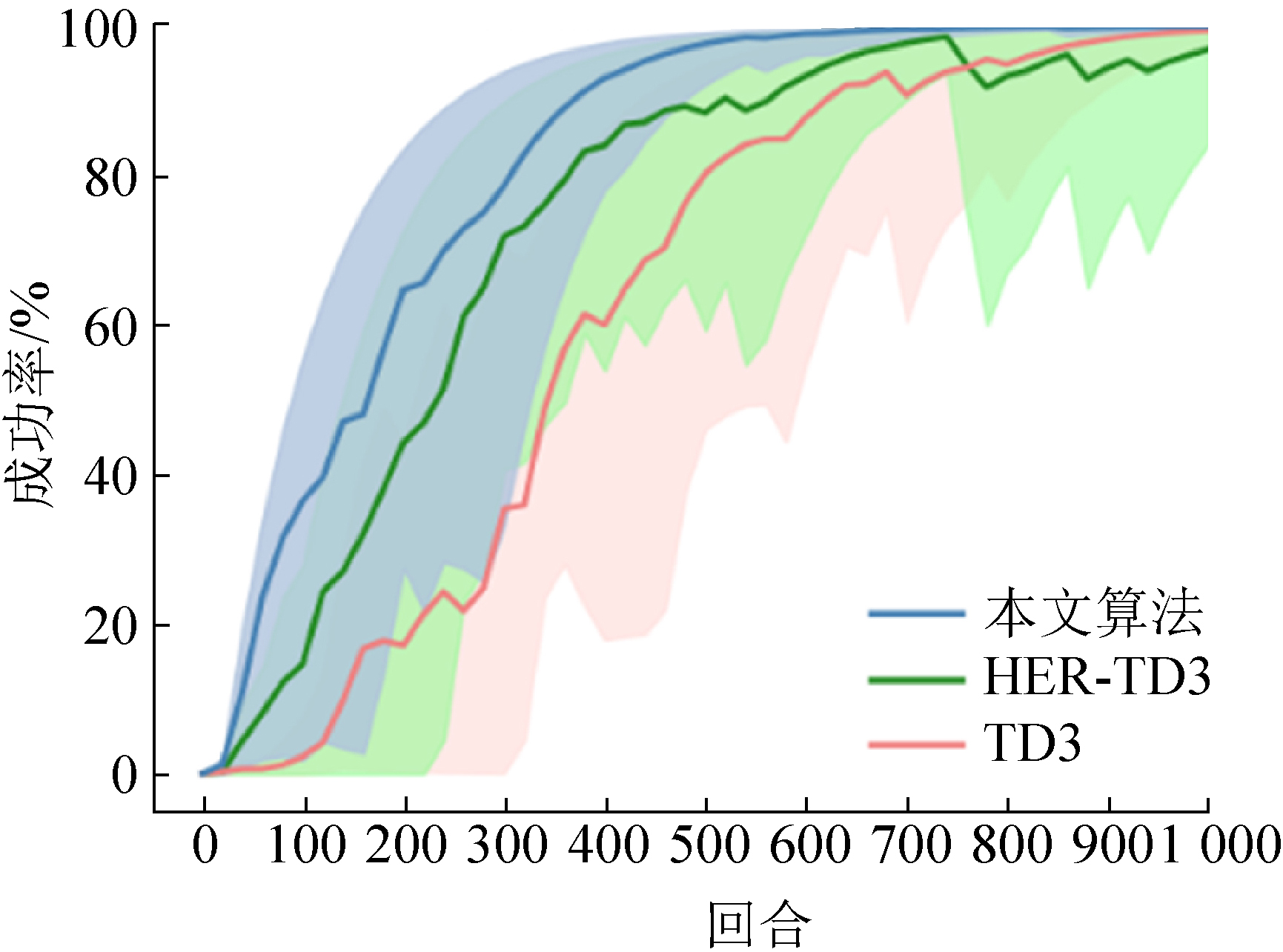
Table 2
Comparison of experiment results of forward looking detection module
| 环境 | 算法 | 平均路径长度/m | 平均运行时间/s |
|---|---|---|---|
| 环境Ⅰ | 算法1 | 138.962 | 0.058 |
| 算法2 | 140.969 | 0.045 | |
| 环境Ⅱ | 算法1 | 139.543 | 0.060 |
| 算法2 | 131.417 | 0.044 | |
| 环境Ⅳ | 算法1 | 142.743 | 0.077 |
| 算法2 | 151.549 | 0.051 |
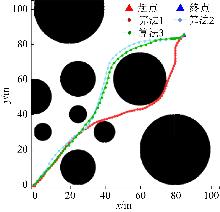
Fig. 9
Comparison of planned paths
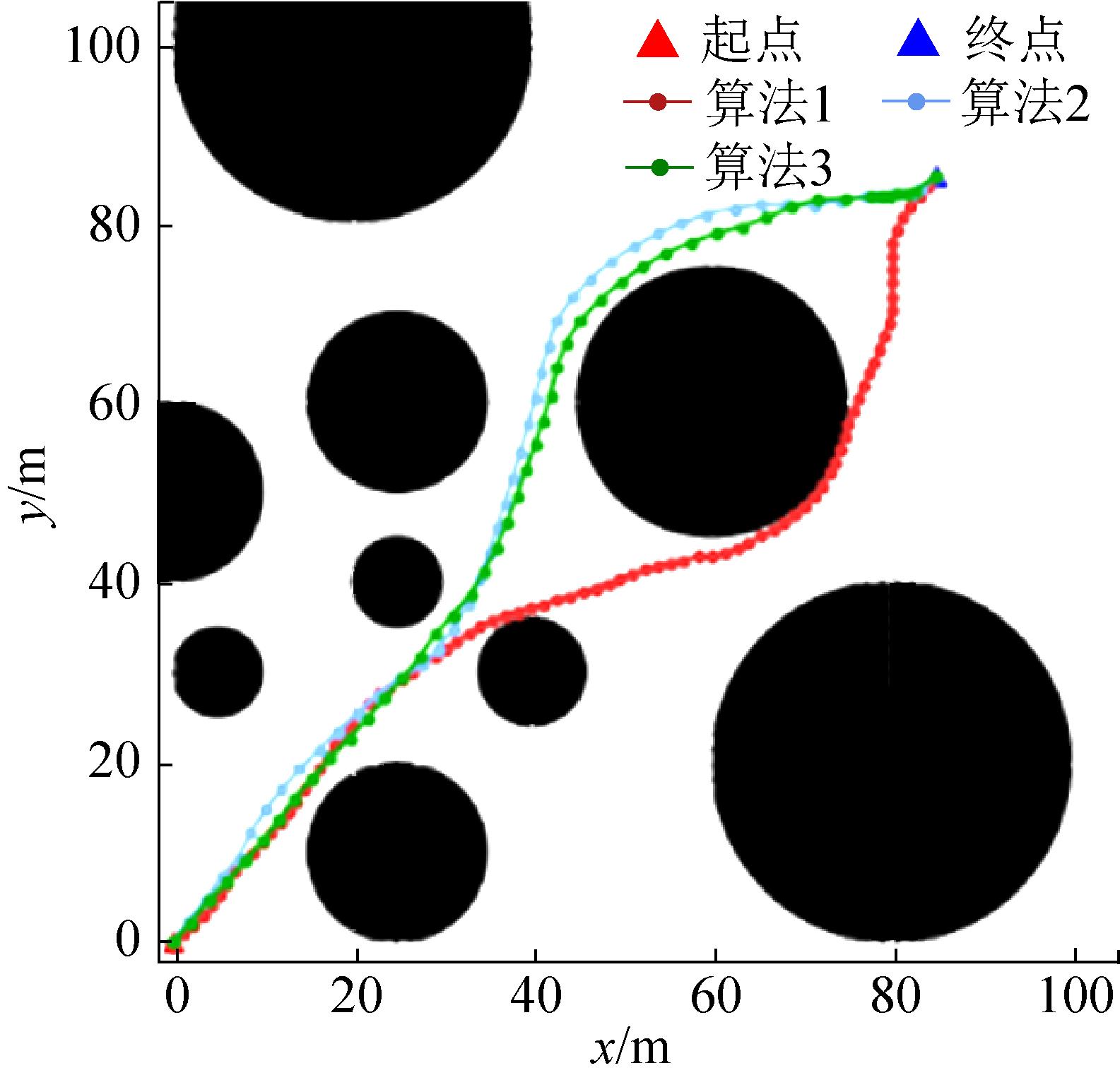

Fig. 10
Rewards and path length changes in different environments
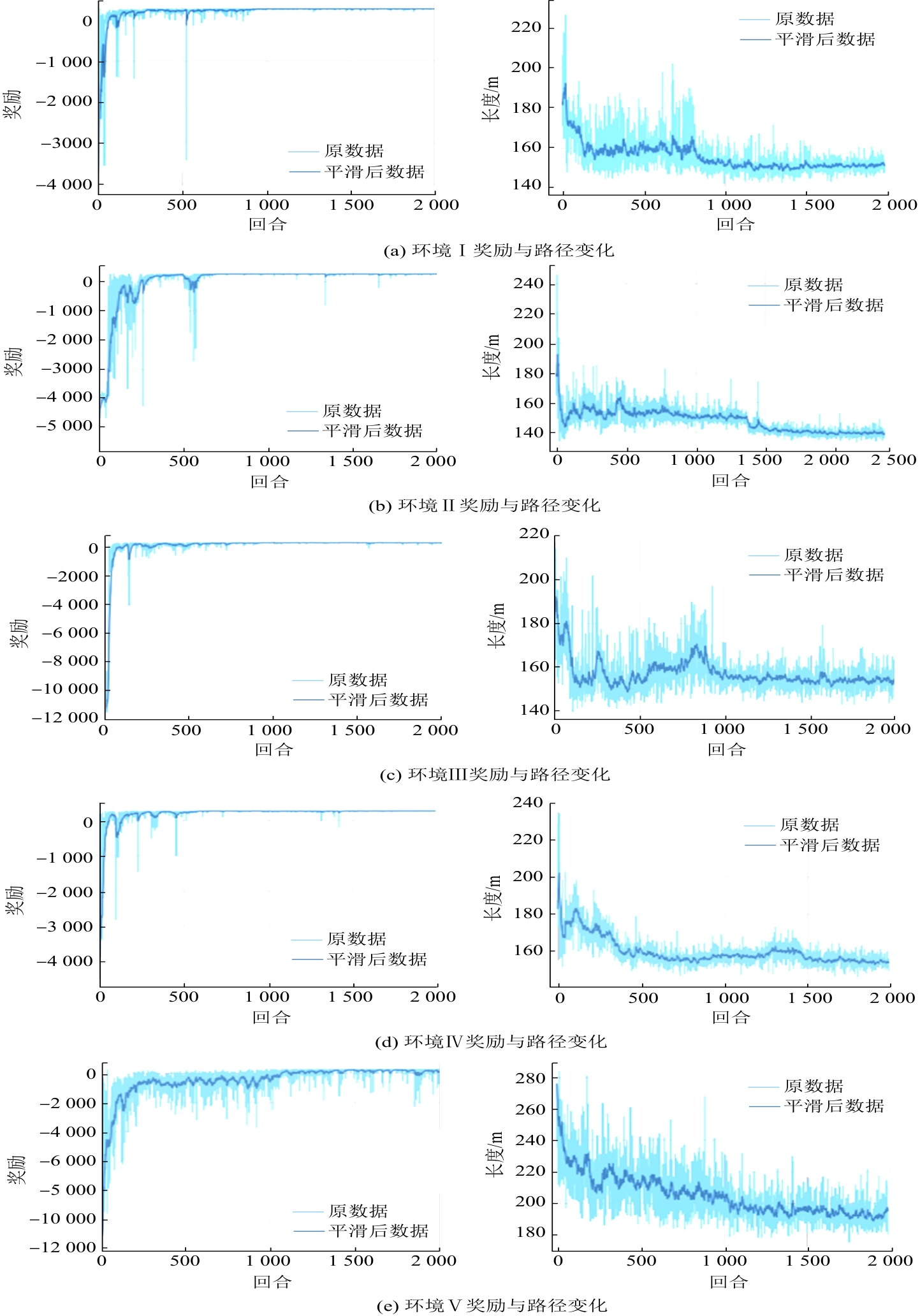
Table 3
Experiment results in environment Ⅰ
| 算法 | 平均路径长度/m | 平均运行时间/s | 平均 转向角/(°) | 最小 步数 |
|---|---|---|---|---|
| RRT | 161.327 | 0.074 | 3 264.6 | 452 |
| RRT* | 137.763 | 0.473 | 210.0 | 406 |
| RRT-connect | 156.976 | 0.102 | 2 893.9 | 423 |
| DQN-RRT | 157.044 | 0.069 | 1 924.8 | 59 |
| 本文算法 | 140.969 | 0.046 | 303.6 | 68 |
Table 4
Experiment results in environment Ⅱ
| 算法 | 平均 路径长度/m | 平均运行时间/s | 平均 转向角/(°) | 最小 步数 |
|---|---|---|---|---|
| RRT | 156.730 | 0.087 | 3 305.9 | 141 |
| RRT* | 131.433 | 1.792 | 324.1 | 289 |
| RRT-connect | 151.971 | 0.077 | 2 006.3 | 112 |
| DQN-RRT | 145.120 | 0.626 | 2 170.1 | 72 |
| 本文算法 | 130.843 | 0.033 | 235.2 | 48 |
Table 5
Experiment results in environment Ⅲ
| 算法 | 平均路径长度/m | 平均运行时间/s | 平均转向角/(°) | 最小 步数 |
|---|---|---|---|---|
| RRT | 152.762 | 0.055 | 2 246.8 | 337 |
| RRT* | 135.544 | 0.311 | 224.0 | 289 |
| RRT-connect | 152.411 | 0.097 | 2 239.3 | 88 |
| DQN-RRT | 178.228 | 0.294 | 1 916.9 | 76 |
| 本文算法 | 143.720 | 0.084 | 246.2 | 50 |
Table 6
Experiment results in environment Ⅳ
| 算法 | 平均路径长度/m | 平均运行时间/s | 平均转向角/(°) | 最小 步数 |
|---|---|---|---|---|
| RRT | 173.275 | 0.071 | 3 762.4 | 341 |
| RRT* | 143.048 | 1.124 | 276.0 | 364 |
| RRT-connect | 162.888 | 0.061 | 3 273.8 | 241 |
| DQN-RRT | 162.279 | 0.419 | 3 111.9 | 102 |
| 本文算法 | 145.597 | 0.041 | 405.6 | 51 |
Table 7
Experiment results in environment Ⅴ
| 算法 | 平均路径长度/m | 平均运行时间/s | 平均转向角/(°) | 最小 步数 |
|---|---|---|---|---|
| RRT | 202.996 | 1.207 | 3 703.4 | 2 000 |
| RRT* | 181.333 | 2.175 | 590.4 | 623 |
| RRT-connect | 218.475 | 0.270 | 4 176.7 | 296 |
| DQN-RRT | 未收敛 | 未收敛 | 未收敛 | 未收敛 |
| 本文算法 | 169.131 | 0.247 | 607.2 | 62 |

Fig. 11
Comparison of planned paths in different environments
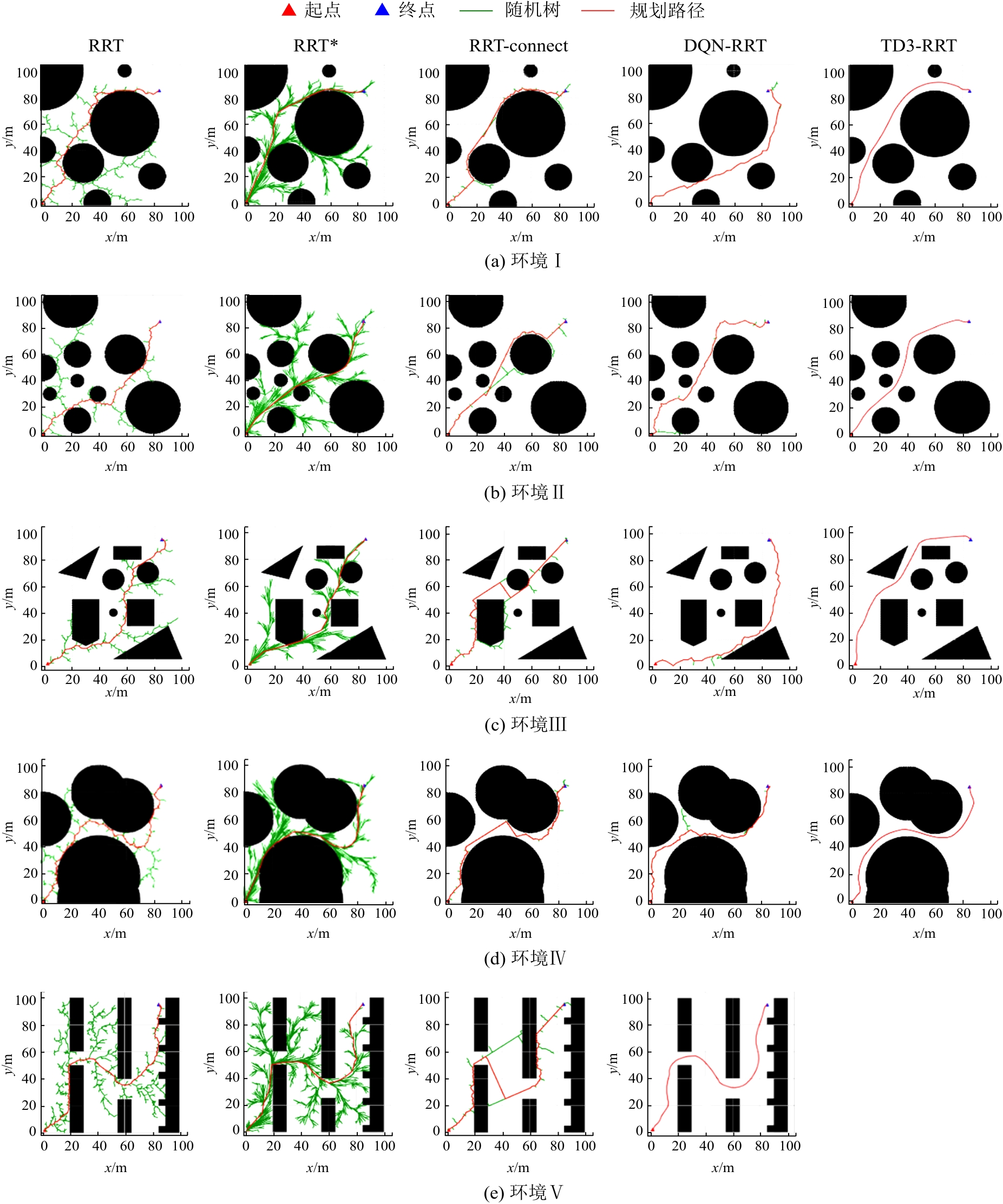
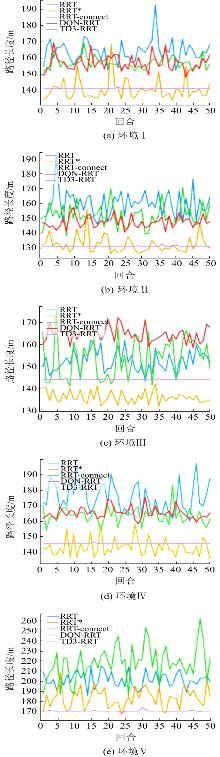
Fig. 12
Comparison of path lengths in different environments
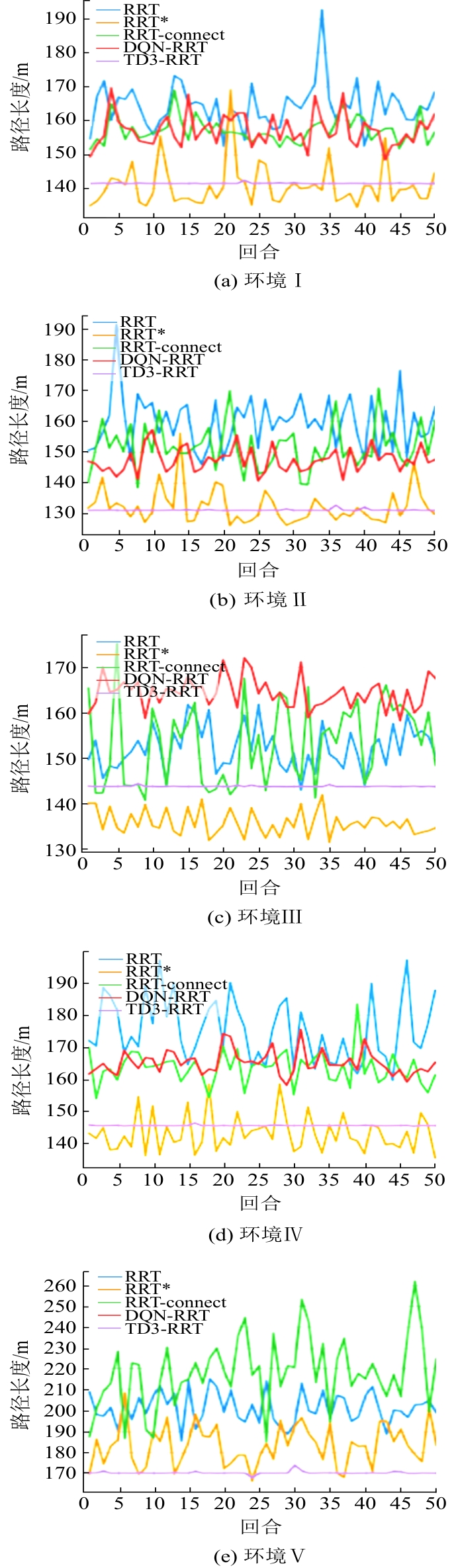

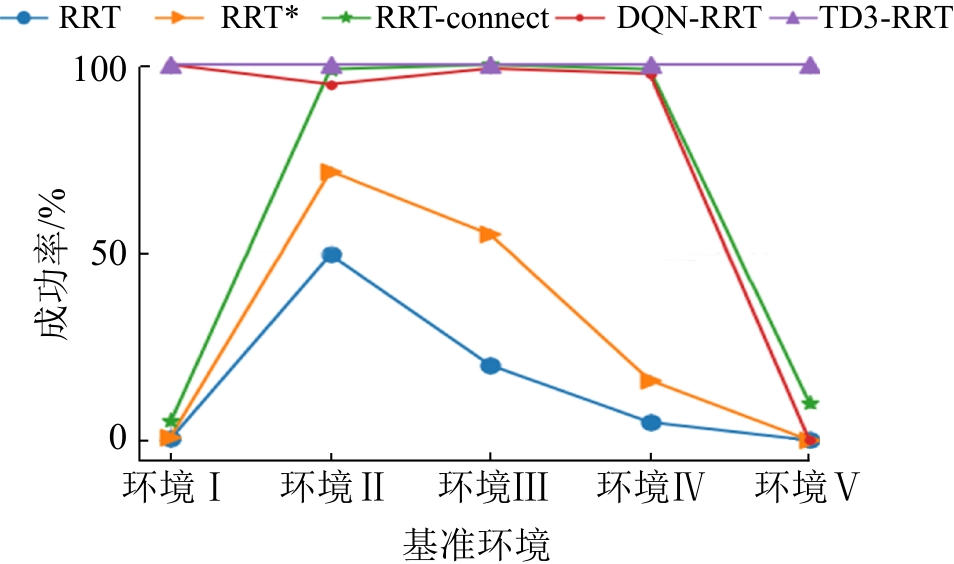
Fig. 13
Comparison of success rates of different algorithms in different environments
| [1] | Zhang Dengxing, Chen Chen, Zhang Guanyu. AGV Path Planning Based on Improved A-star Algorithm[C]//2024 IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC). Piscataway: IEEE, 2024: 1590-1595. |
| [2] | Fan Xiaojing, Guo Yinjing, Liu Hui, et al. Improved Artificial Potential Field Method Applied for AUV Path Planning[J]. Mathematical Problems in Engineering, 2020, 2020(1): 6523158. |
| [3] | Ubaidillah Achmad, Sukri Hanifudin. Application of Odometry and Dijkstra Algorithm as Navigation and Shortest Path Determination System of Warehouse Mobile Robot[J]. Journal of Robotics and Control, 2023, 4(3): 413-423. |
| [4] | Zhang Jingcheng, An Yuqiang, Cao Jianing, et al. UAV Trajectory Planning for Complex Open Storage Environments Based on an Improved RRT Algorithm[J]. IEEE Access, 2023, 11: 23189-23204. |
| [5] | Chen Zihong, Zhang Xing, Wang Liangyan, et al. A Fast Path Planning Method Based on RRT Star Algorithm[C]//2023 3rd International Conference on Consumer Electronics and Computer Engineering (ICCECE). Piscataway: IEEE, 2023: 258-262. |
| [6] | Tu Zhixin, Zhuang Wenbing, Leng Yuquan, et al. Accelerated Informed RRT*: Fast and Asymptotically Path Planning Method Combined with RRT*-connect and APF[C]//International Conference on Intelligent Robotics and Applications. Singapore: Springer Nature Singapore, 2023: 279-292. |
| [7] | Tu Haiyan, Deng Yizhao, Li Qiyang, et al. Improved RRT Global Path Planning Algorithm Based on Bridge Test[J]. Robotics and Autonomous Systems, 2024, 171: 104570. |
| [8] | Gu Qiyong, Zhen Rong, Liu Jialun, et al. An Improved RRT Algorithm Based on Prior AIS Information and DP Compression for Ship Path Planning[J]. Ocean Engineering, 2023, 279: 114595. |
| [9] | Huang Jie, Sun Wei. A Method of Feasible Trajectory Planning for UAV Formation Based on Bi-directional Fast Search Tree[J]. Optik, 2020, 221: 165213. |
| [10] | Nguyen T T, Nguyen N D, Nahavandi S. Deep Reinforcement Learning for Multiagent Systems: A Review of Challenges, Solutions, and Applications[J]. IEEE Transactions on Cybernetics, 2020, 50(9): 3826-3839. |
| [11] | Sun Qingqiang, Ge Zhiqiang. A Survey on Deep Learning for Data-driven Soft Sensors[J]. IEEE Transactions on Industrial Informatics, 2021, 17(9): 5853-5866. |
| [12] | Wang Ruihui, Xu Li. Application of Deep Reinforcement Learning in UAVs: A Review[C]//2022 34th Chinese Control and Decision Conference (CCDC). Piscataway: IEEE, 2022: 4096-4103. |
| [13] | Wang Haodong, Hao Jiangyu, Wu Wenhao, et al. A New AGV Path Planning Method Based on PPO Algorithm[C]//2023 42nd Chinese Control Conference (CCC). Piscataway: IEEE, 2023: 3760-3765. |
| [14] | 李昭莹, 欧一鸣, 石若凌. 基于深度Q网络的改进RRT路径规划算法[J]. 空天防御, 2021, 4(3): 17-23. |
| Li Zhaoying, Yiming Ou, Shi Ruoling. Improved RRT Path Planning Algorithm Based on Deep Q-network[J]. Air & Space Defense, 2021, 4(3): 17-23. | |
| [15] | Qiu Yue, Zhou Suyang, Xia Dong, et al. Local Integrated Energy System Operational Optimization Considering Multi-type Uncertainties: A Reinforcement Learning Approach Based on Improved TD3 Algorithm[J]. IET Renewable Power Generation, 2023, 17(9): 2236-2256. |
| [16] | Bhourji R S, Mozaffari S, Alirezaee S. Reinforcement Learning DDPG–PPO Agent-based Control System for Rotary Inverted Pendulum[J]. Arabian Journal for Science and Engineering, 2024, 49(2): 1683-1696. |
| [17] | Hu Yutao, Zhao Yuntao, Feng Yongxin, et al. OneR-DQN: A Botnet Traffic Detection Model Based on Deep Q Network Algorithm in Deep Reinforcement Learning[J]. International Journal of Security and Networks, 2024, 19(1): 31-42. |
| [18] | Liu Yuchen, Man K L, Li Gangmin, et al. Evaluating and Selecting Deep Reinforcement Learning Models for Optimal Dynamic Pricing: A Systematic Comparison of PPO, DDPG, and SAC[C]//Proceedings of the 2024 8th International Conference on Control Engineering and Artificial Intelligence. New York: ACM, 2024: 215-219. |
| [19] | Schramm L, Deng Yunfu, Granados E, et al. USHER: Unbiased Sampling for Hindsight Experience Replay[C]//Proceedings of the 6th Conference on Robot Learning. Chia Laguna Resort: PMLR, 2023: 2073-2082. |
| [20] | Shi Chengchun, Zhu Jin, Shen Ye, et al. Off-policy Confidence Interval Estimation with Confounded Markov Decision Process[J]. Journal of the American Statistical Association, 2024, 119(545): 273-284. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
