

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2181-2192.doi: 10.16182/j.issn1004731x.joss.23-0575
Previous Articles Next Articles
Xu Jian1, Liu Gaofeng1, Zhao Yijian1, Zheng Zili1, Yan Huanying2
Received:2023-05-15
Revised:2023-08-17
Online:2024-09-15
Published:2024-09-30
CLC Number:
Xu Jian, Liu Gaofeng, Zhao Yijian, Zheng Zili, Yan Huanying. The Synchronous Grasping Method of Virtual-real Assembly Robot Based on Digital Twin[J]. Journal of System Simulation, 2024, 36(9): 2181-2192.

Fig. 1
Framework of virtual real synchronization system for robots
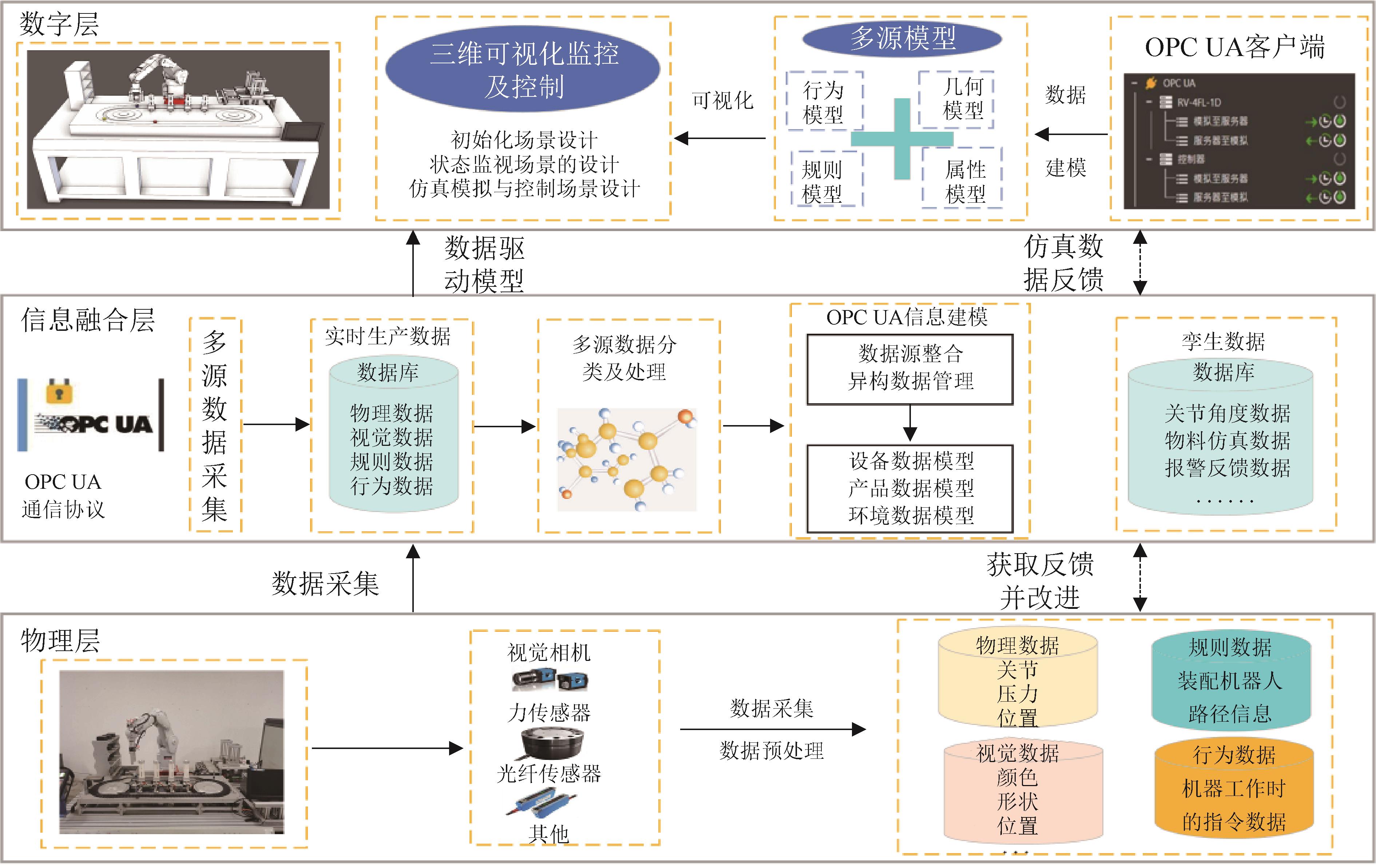
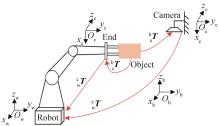
Fig. 2
Schematic diagram of hand eye calibration
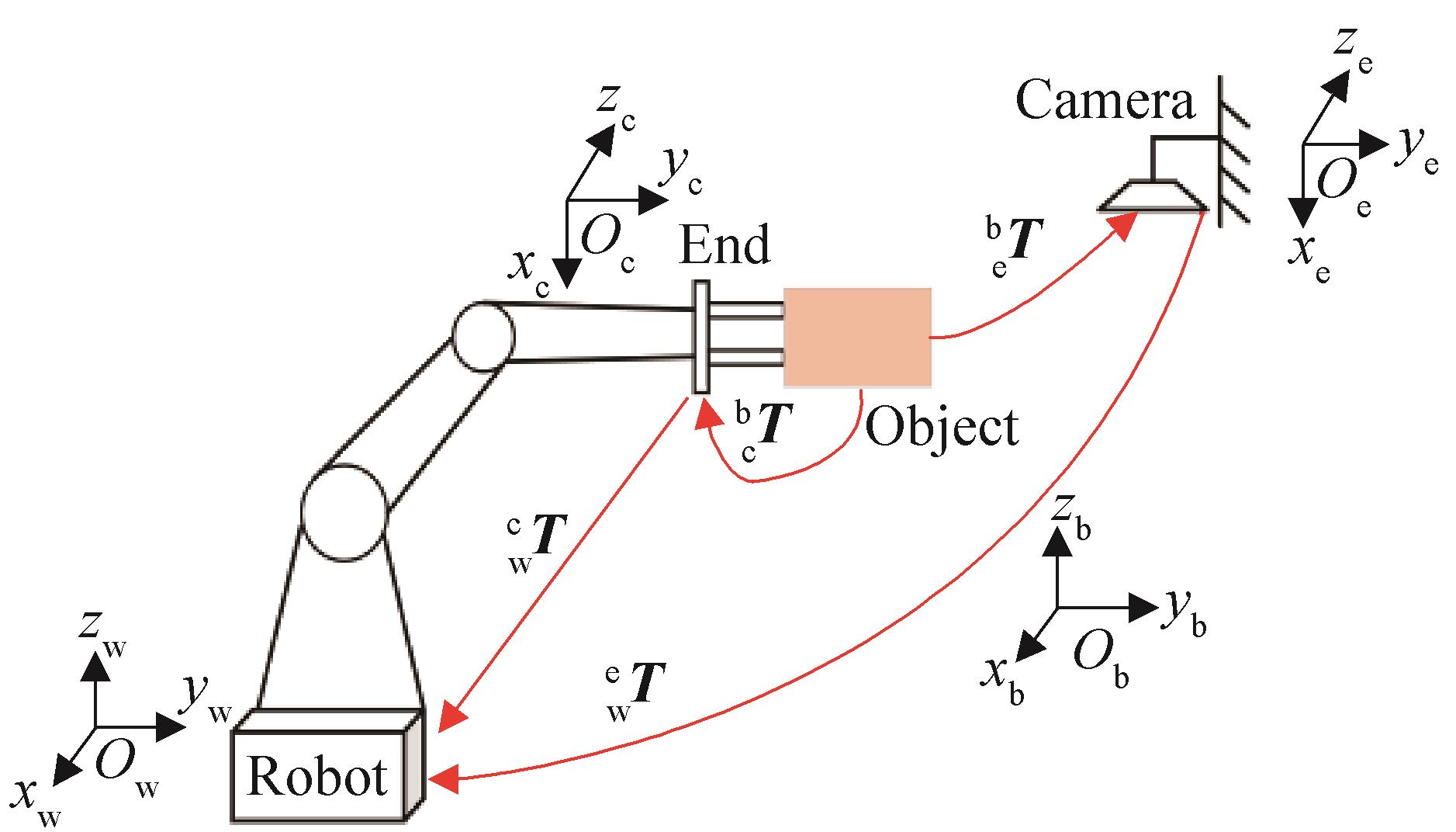
Fig. 3
Digital twin robot grasping framework
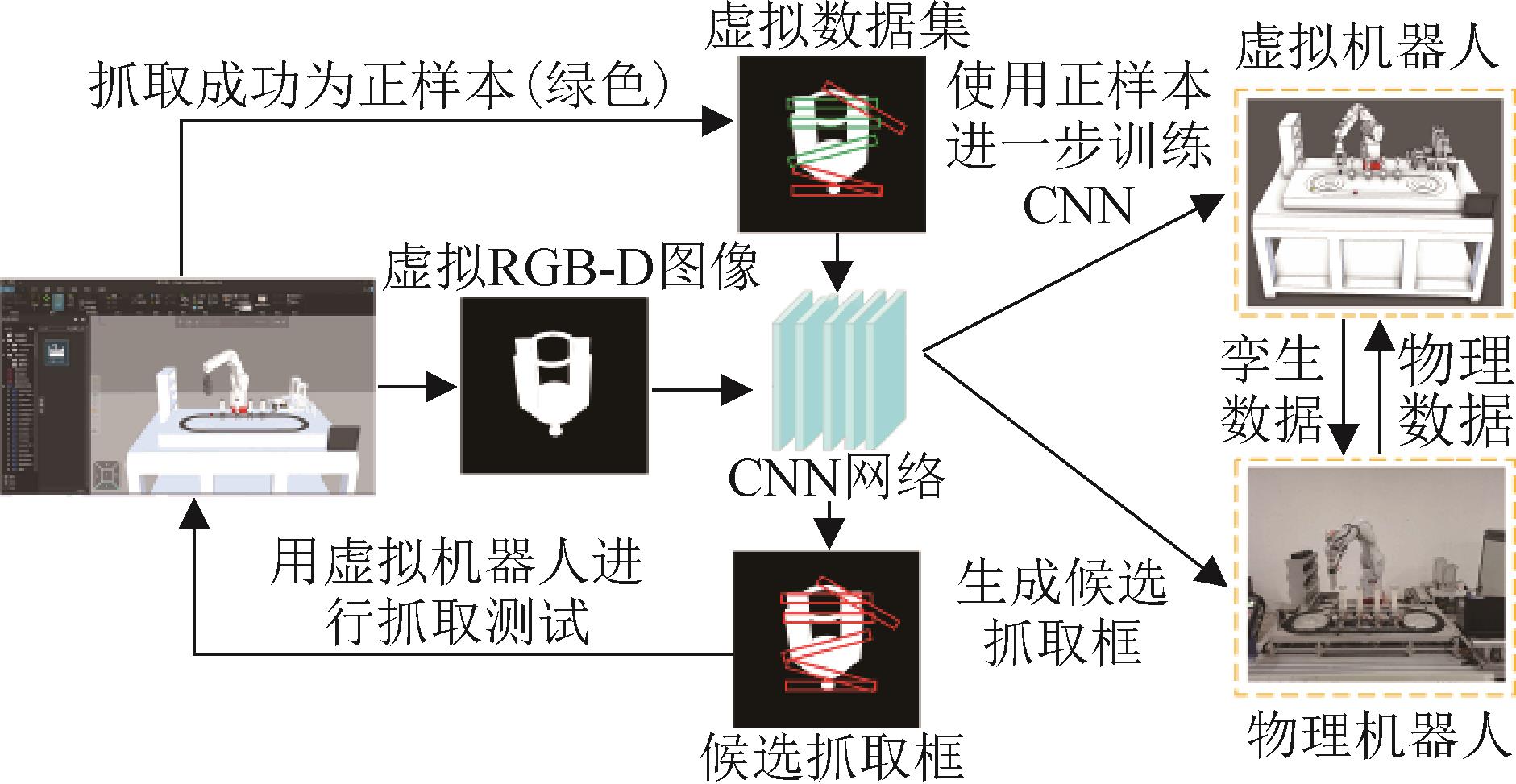
Fig. 4
Digital twin synchronization mechanism for robot manufacturing unit
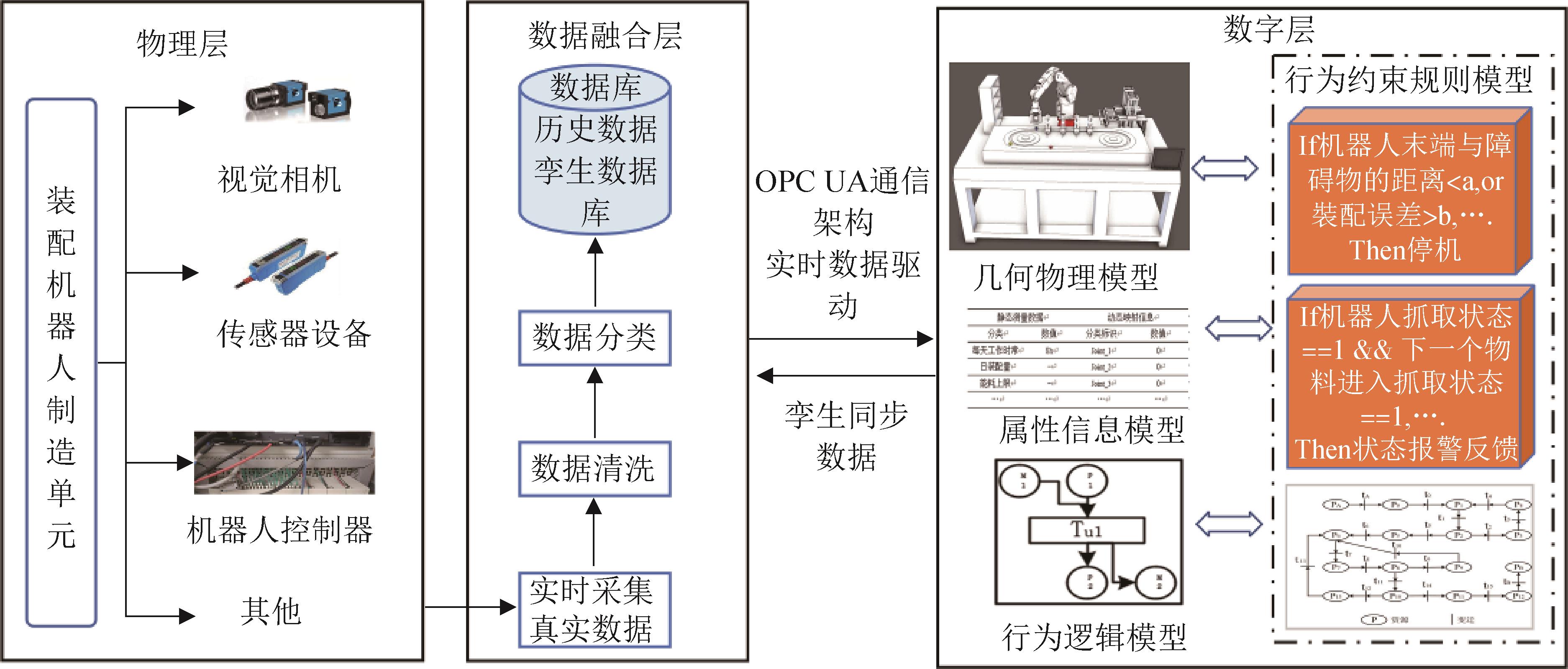
Fig. 5
Multi source heterogeneous data processing
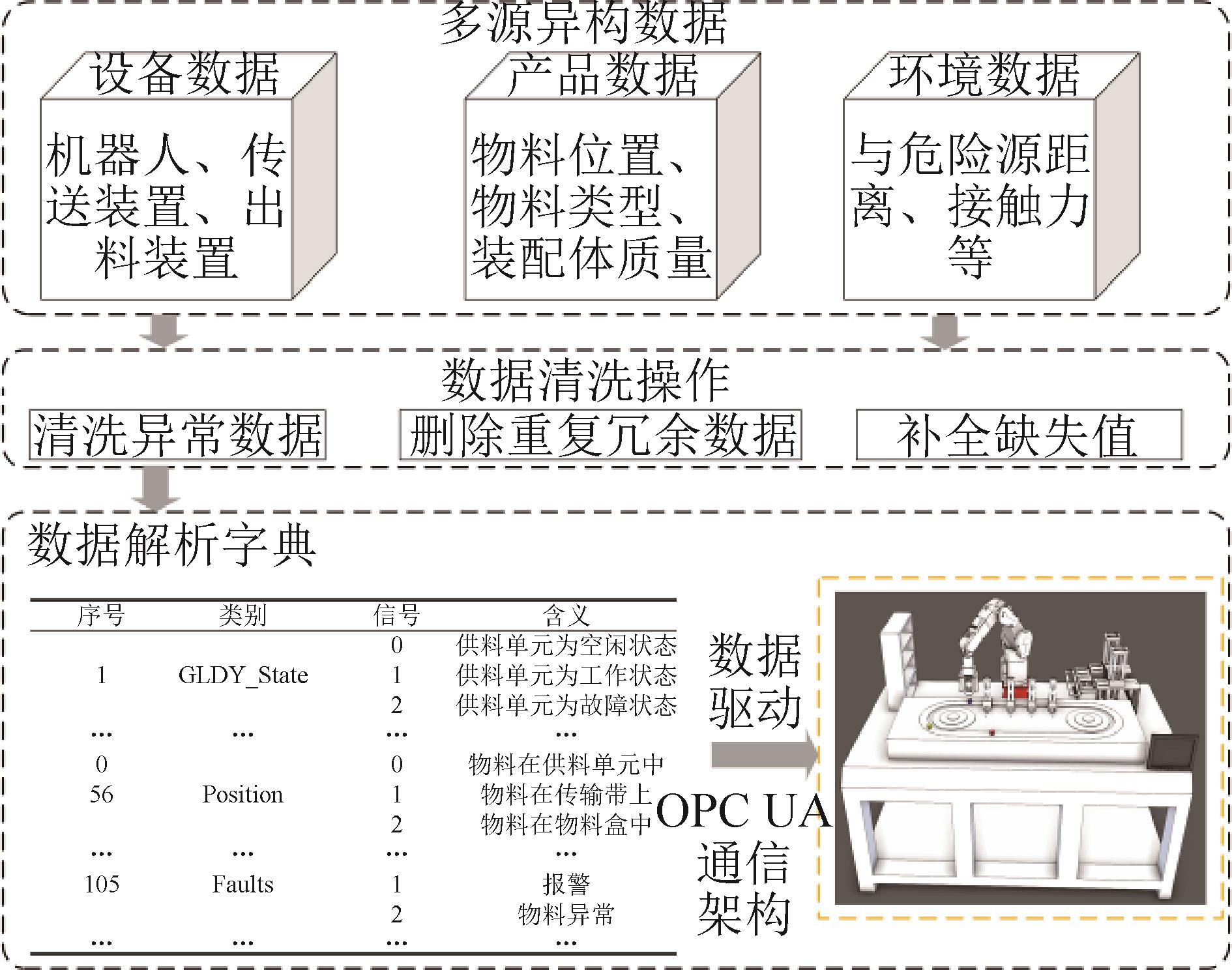
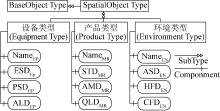
Fig. 6
Real time data OPC UA information model based on digital twin
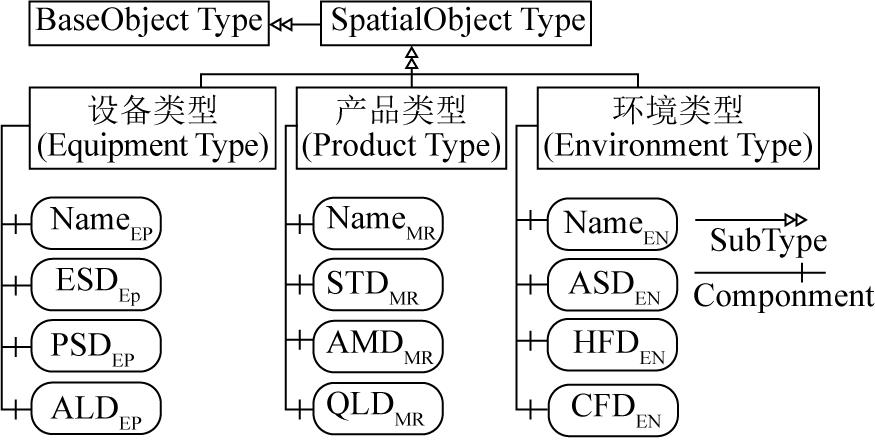
Fig. 7
Virtual real connection based on OPC UA server
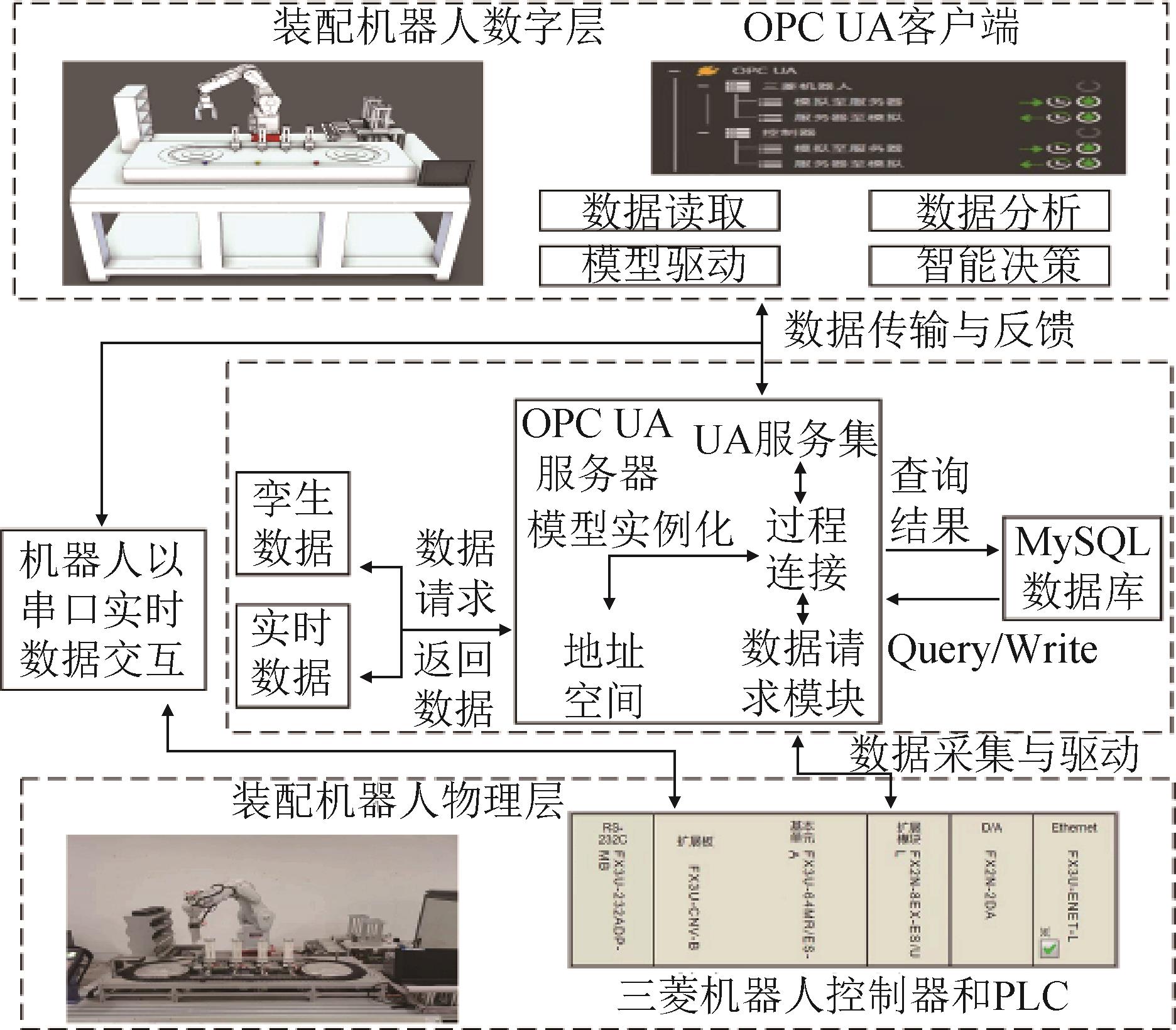
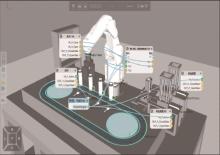
Fig. 8
Connection diagram of robot state variables
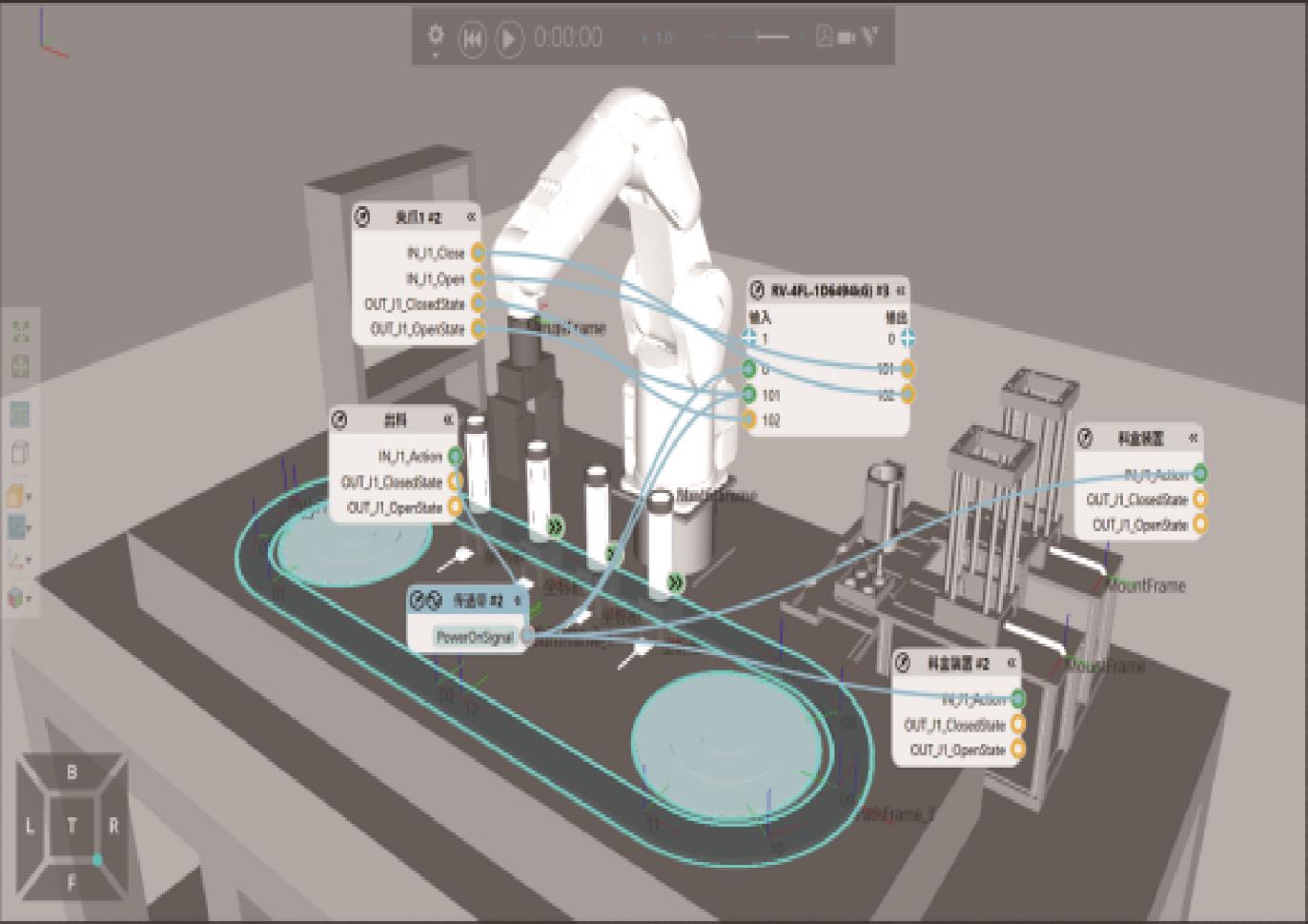

Fig. 9
Data driven virtual model operation
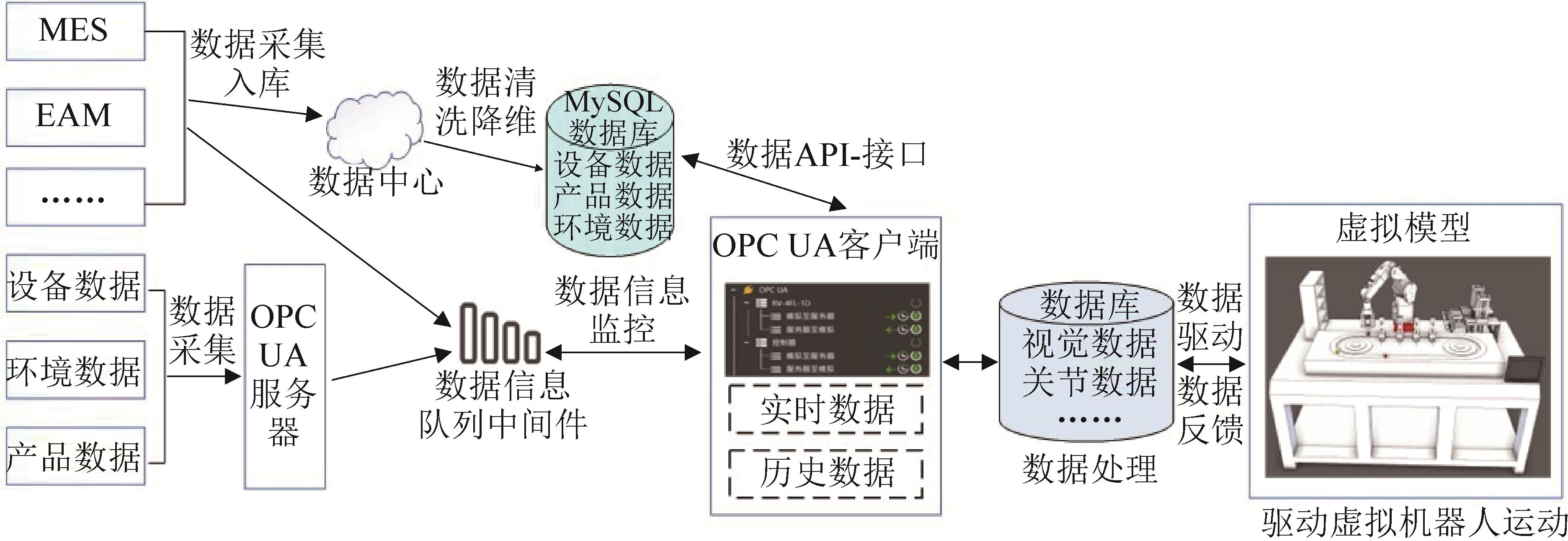

Fig. 10
Virtual layer OPC UA connection screen
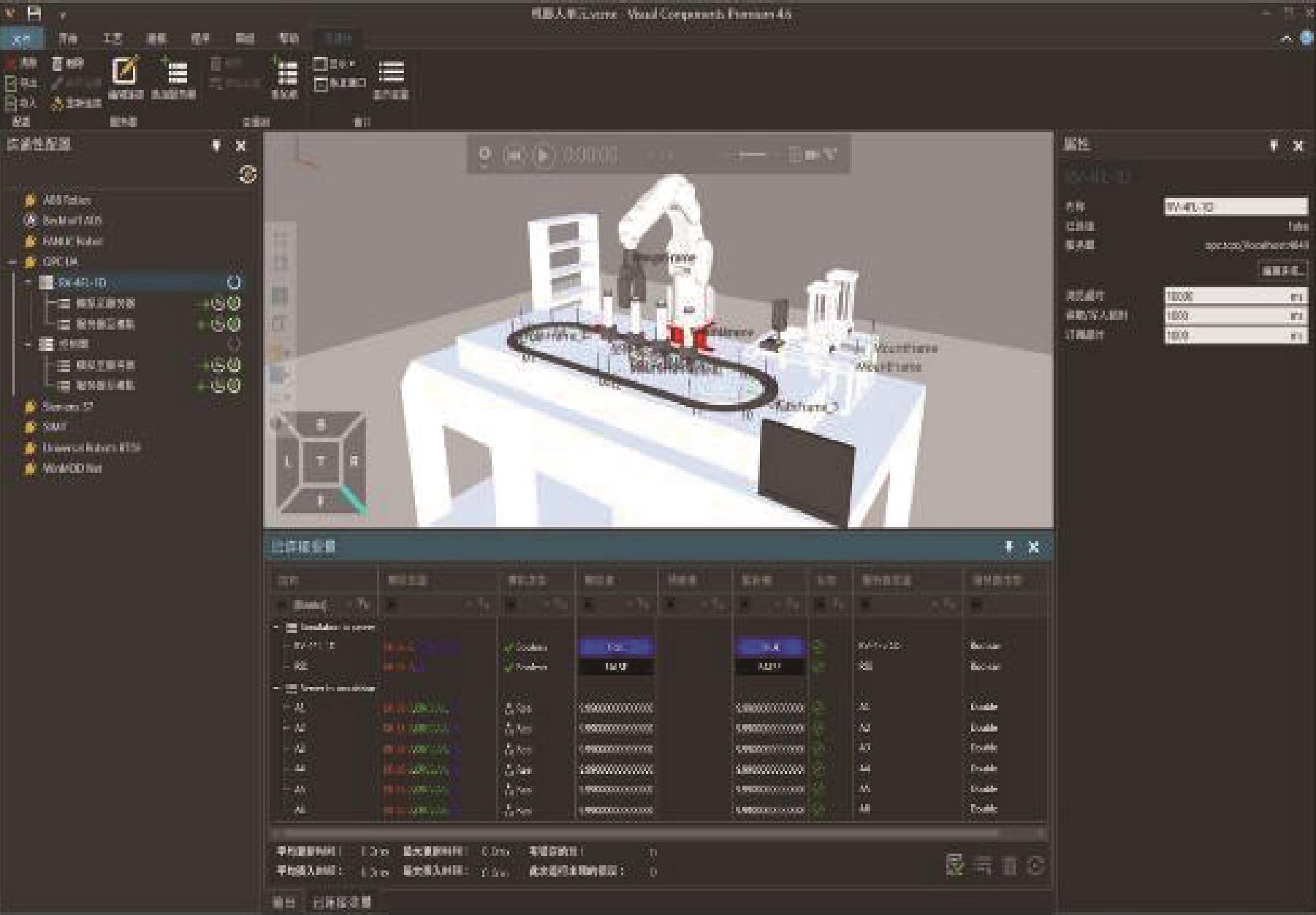

Fig. 11
Monitoring results of connected variables
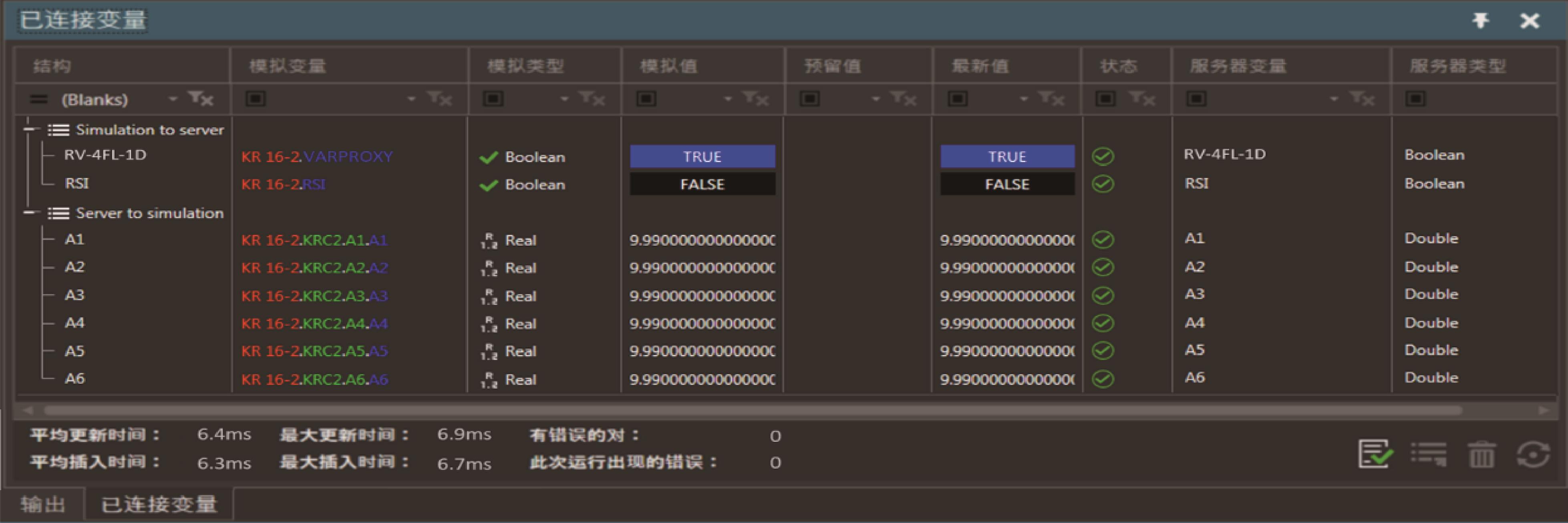

Fig. 12
Joint angle values of virtual and real robots
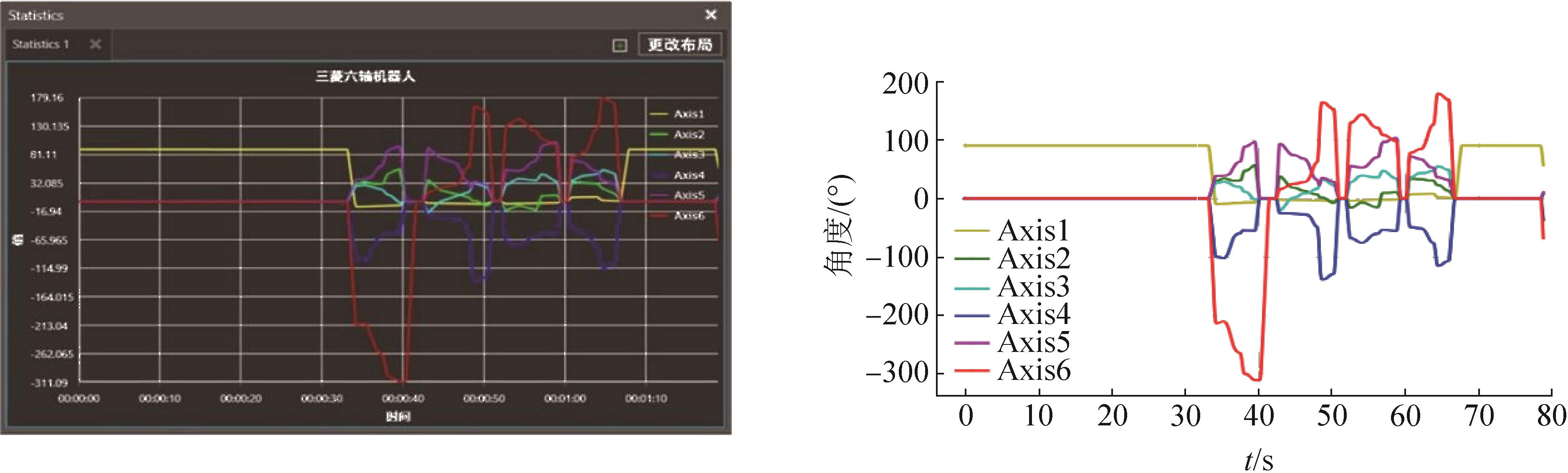

Fig. 13
Schematic diagram of virtual and real synchronization of assembly robot

Table 1
Joint angle data
| 点位 | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
| -70.21 | 91.32 | 345.16 | 112.58 | 132.98 | 16.51 | |
| -70.12 | 91.27 | 345.08 | 112.47 | 132.84 | 16.42 | |
| 0.09 | 0.05 | 0.08 | 0.11 | 0.14 | 0.09 | |
| 72.18 | 121.21 | 112.93 | 109.28 | 39.98 | -72.56 | |
| 72.09 | 121.08 | 112.87 | 109.19 | 40.05 | -72.49 | |
| 0.09 | 0.13 | 0.06 | 0.09 | 0.07 | 0.07 | |
| 140.31 | -48.68 | 37.12 | -65.89 | 48.75 | 94.87 | |
| 140.23 | -48.56 | 37.19 | -65.74 | 48.63 | 94.93 | |
| 0.08 | 0.12 | 0.07 | 0.15 | 0.12 | 0.06 |
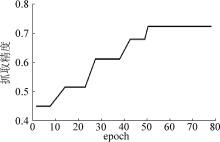
Fig. 14
Virtual grab accuracy
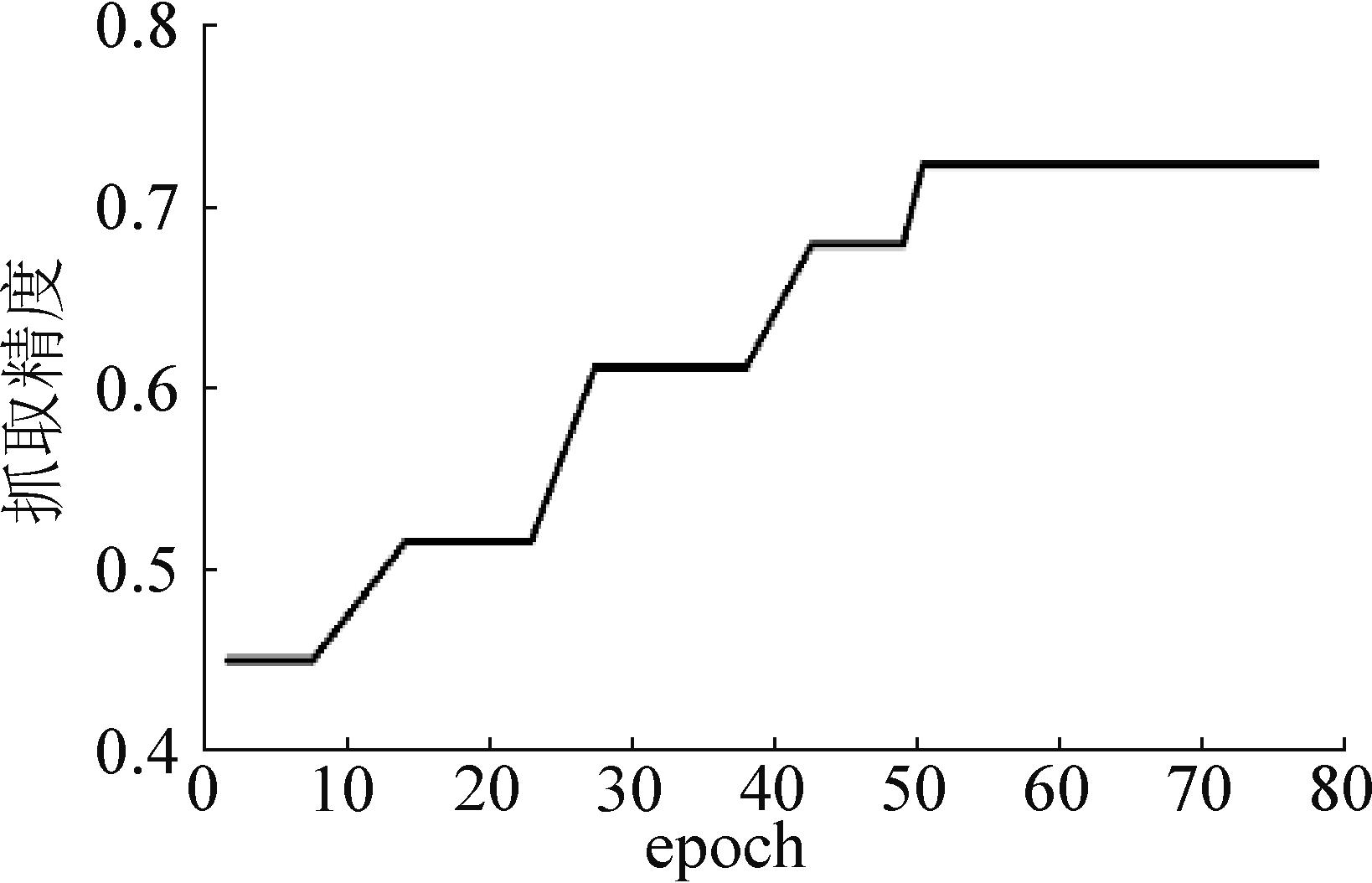
Table 2
Grab accuracy
| 抓取 | 原始CNN | 数字孪生优化CNN |
|---|---|---|
| 虚拟 | 0.58 | 0.63 |
| 真实 | 0.48 | 0.56 |
| 1 | Hu Fuwen. Mutual Information-enhanced Digital Twin Promotes Vision-guided Robotic Grasping[J]. Advanced Engineering Informatics, 2022, 52: 101562. |
| 2 | Kleeberger Kilian, Bormann Richard, Kraus Werner, et al. A Survey on Learning-based Robotic Grasping[J]. Current Robotics Reports, 2020, 1(4): 239-249. |
| 3 | Real E, Moore S, Selle A, et al. Large-scale Evolution of Image Classifiers[C]//Proceedings of the 34th International Conference on Machine Learning. Cambridge: JMLR, 2017: 2902-2911. |
| 4 | Akinola I, Angelova A, Lu Yao, et al. Visionary: Vision Architecture Discovery for Robot Learning[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2021: 10779-10785. |
| 5 | Liu Yongkui, Xu He, Liu Ding, et al. A Digital Twin-based Sim-to-real Transfer for Deep Reinforcement Learning-enabled Industrial Robot Grasping[J]. Robotics and Computer-Integrated Manufacturing, 2022, 78: 102365. |
| 6 | Grieves M. Digital Twin: Manufacturing Excellence Through Virtual Factory Replication[J]. White paper, 2014, 1: 1-7. |
| 7 | 陶飞, 刘蔚然, 张萌, 等. 数字孪生五维模型及十大领域应用[J]. 计算机集成制造系统, 2019, 25(1): 1-18. |
| Tao Fei, Liu Weiran, Zhang Meng, et al. Five-dimension Digital Twin Model and Its Ten Applications[J]. Computer Integrated Manufacturing Systems, 2019, 25(1): 1-18. | |
| 8 | Tipary Bence, Erdős Gábor. Generic Development Methodology for Flexible Robotic Pick-and-place Workcells Based on Digital Twin[J]. Robotics and Computer-Integrated Manufacturing, 2021, 71: 102140. |
| 9 | 徐健, 宋鑫, 刘秀平, 等. 基于数字孪生的装配机器人建模及系统实现[J]. 系统仿真学报, 2023, 35(7): 1497-1507. |
| Xu Jian, Song Xin, Liu Xiuping, et al. Modeling and System Realization of Assembly Robot Based on Digital Twin[J]. Journal of System Simulation, 2023, 35(7): 1497-1507. | |
| 10 | 刘怀兰, 赵文杰, 李世壮, 等. 数字孪生车间机器人虚实驱动系统构建方法[J]. 中国机械工程, 2022, 33(21): 2623-2632. |
| Liu Huailan, Zhao Wenjie, Li Shizhuang, et al. Construction Method of Virtual-real Drive Systems for Robots in Digital Twin Workshops[J]. China Mechanical Engineering, 2022, 33(21): 2623-2632. | |
| 11 | Kuts Vladimir, Otto Tauno, Tähemaa Toivo, et al. Digital Twin Based Synchronised Control and Simulation of the Industrial Robotic Cell Using Virtual Reality[J]. Journal of Machine Engineering, 2019, 19(1): 128-144. |
| 12 | 王剑, 王好臣, 李学伟, 等. 基于OPC UA的数字孪生车间信息物理融合系统[J]. 现代制造工程, 2023(4): 43-50. |
| Wang Jian, Wang Haochen, Li Xuewei, et al. Digital Twin Workshop Information Physical Fusion System Based on OPC UA[J]. Modern Manufacturing Engineering, 2023(4): 43-50. | |
| 13 | 乔峰丽, 苗鸿宾, 纪慧君, 等. 面向数字孪生的工业机械臂手眼标定方法的研究[J]. 机床与液压, 2023, 51(1): 31-35. |
| Qiao Fengli, Miao Hongbin, Ji Huijun, et al. Research on Hand-eye Calibration Method for Digital Twin Oriented Industrial Manipulator[J]. Machine Tool & Hydraulics, 2023, 51(1): 31-35. | |
| 14 | 马喜平, 李迪, 姚侠楠, 等. 基于Tsai两步法的视觉点胶系统相机标定方法[J]. 自动化与仪表, 2018, 33(5): 1-4, 18. |
| Ma Xiping, Li Di, Yao Xianan, et al. Camera Calibration of Visual Dispensing System Based on Tsai's Two-step Method[J]. Automation & Instrumentation, 2018, 33(5): 1-4, 18. | |
| 15 | Kyu Tae Park, Lee Donggun, Sang Do Noh. Operation Procedures of a Work-center-level Digital Twin for Sustainable and Smart Manufacturing[J]. International Journal of Precision Engineering and Manufacturing-Green Technology, 2020, 7(3): 791-814. |
| 16 | 周学广, 吕伟栋, 袁志民. 基于着色Petri网的舰艇指挥控制信息流建模研究[J]. 系统仿真学报, 2019, 31(5): 828-842. |
| Zhou Xueguang, Weidong Lü, Yuan Zhimin. Colored Petri Net Based Modeling on Warship Command and Control Information Flow[J]. Journal of System Simulation, 2019, 31(5): 828-842. | |
| 17 | Perzylo Alexander, Profanter Stefan, Rickert Markus, et al. OPC UA NodeSet Ontologies as a Pillar of Representing Semantic Digital Twins of Manufacturing Resources[C]//2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). Piscataway, NJ, USA: IEEE, 2019: 1085-1092. |
| 18 | 束长宝, 于照, 张继勇. 基于TCP/IP的网络通信及其应用[J]. 微计算机信息, 2006(36): 157-159. |
| Shu Changbao, Yu Zhao, Zhang Jiyong. Network Communication and Its Applications Based on TCP/IP[J]. Microcomputer Information, 2006(36): 157-159. | |
| 19 | Lenz I, Lee H, Saxena A. Deep Learning for Detecting Robotic Grasps[J]. International Journal of Robotics Research, 2015, 34(4/5): 705-724. |
| 20 | Wohlkinger Walter, Aldoma Aitor, Rusu R B, et al. 3DNet: Large-scale Object Class Recognition from CAD Models[C]//2012 IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2012: 5384-5391. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Nan Yandong, Zhu Jinda, Lu Xinbin, Qin Zhiying, Qi Dandan, Ding Zhiheng. State Monitoring of Nuclear Power Connection Sleeve Quality Inspection Equipment Driven by Digital Twin [J]. Journal of System Simulation, 2026, 38(4): 1004-1017. |
| [3] | Yan Dong, Yang Hanzhe, Jiang Fangfang, Liu Chengbao, Zhang Peng. Design and Application of Collaborative Simulation System for Satellite Constellation Flight Missions [J]. Journal of System Simulation, 2026, 38(4): 1067-1079. |
| [4] | Wang Ziying, Sun Congjun, Li Guihu, Zhang Tianhao. Virtual Train Operation Platform Based on Digital Twin [J]. Journal of System Simulation, 2026, 38(3): 736-745. |
| [5] | Lu Houjun, Zhu Yifei, Rong Yanping, Zhang Wanghui. Digital Twin Modeling Method for Bulk Cargo Stacks Based on 2D LiDAR [J]. Journal of System Simulation, 2025, 37(9): 2269-2286. |
| [6] | Liu Yongkui, Yang Kang, Tuo Benben, Pan Yaduo, Wang Xinyu, Wang Yihan, Gong Yongqian, Zhang Lin, Wang Lihui, Lin Tingyu, Zi Bin, Li Yuan, You Wei, Xu Xun. Digital Twinned Industrial Robot: Conceptual Framework, Key Technologies, and Case Study [J]. Journal of System Simulation, 2025, 37(7): 1723-1752. |
| [7] | Liu Tao, Li Hanxi, Yin Yong, Liu Jialun. Research Review of Intelligent Navigation Simulation Technology and Its Applications [J]. Journal of System Simulation, 2025, 37(7): 1684-1709. |
| [8] | Chen Qinghua, Liang Zuoyou, Guan Weijuan, Ji Jiadong, Liu Ping. Construction Method of Digital Twin System for High-low Temperature Test Chamber [J]. Journal of System Simulation, 2025, 37(6): 1400-1411. |
| [9] | Zhang Wenjia, Zhang Heming. Research on Grey-box Modeling Method of Digital Twins for Cantilever Structure [J]. Journal of System Simulation, 2025, 37(5): 1158-1168. |
| [10] | Zhang Huimai, Hu Xiaoya, Zhou Chunjie. Digital Twin Framework for the Generation and Optimization of Security Policies for TSN Industrial Control Systems [J]. Journal of System Simulation, 2025, 37(4): 861-874. |
| [11] | Jiang Lun, Wang Dajiang, Sun Wenlei, Bao Shenghui, Liu Han, Chang Saike. Research on Transformer Fault Diagnosis Method Based on Digital Twin [J]. Journal of System Simulation, 2025, 37(3): 775-790. |
| [12] | Hu Tianxiang, Ye Hui, Yang Xiaofei. Construction of a Digital Twin-based Ship Manufacturing Workshop Monitoring System [J]. Journal of System Simulation, 2025, 37(2): 517-528. |
| [13] | Zheng Jiayu, Mai Zhuxue, Chen Zheyi. Optimization of Service Caching and Computation Offloading in Digital Twin Cloud-edge Networks [J]. Journal of System Simulation, 2025, 37(11): 2741-2753. |
| [14] | Zhang Xiyang, Lin Xusheng, Zhou Rui, Hu Yi. Research on the Digital Twin Architecture and Application of CNC System [J]. Journal of System Simulation, 2025, 37(1): 183-198. |
| [15] | Wu Qinghui, BaoYaqing , Zhao Zhongxin, Huang Xu, Wei Yuchen. Research and Implementation of Digital Twin System for Mine Drainage Monitoring [J]. Journal of System Simulation, 2025, 37(1): 199-210. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
