

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2193-2207.doi: 10.16182/j.issn1004731x.joss.23-0585
Previous Articles Next Articles
Sun Haijie1,2, San Hongjun1,2, Xiao Le1,2, Yao Dexin1,2, Chen Jiupeng1,2, Yang Xiaoyuan1,2
Received:2023-05-18
Revised:2023-07-08
Online:2024-09-15
Published:2024-09-30
Contact:
San Hongjun
CLC Number:
Sun Haijie, San Hongjun, Xiao Le, Yao Dexin, Chen Jiupeng, Yang Xiaoyuan. An Improved Path Planning Algorithm for Mobile Robots[J]. Journal of System Simulation, 2024, 36(9): 2193-2207.

Fig. 1
Grid map
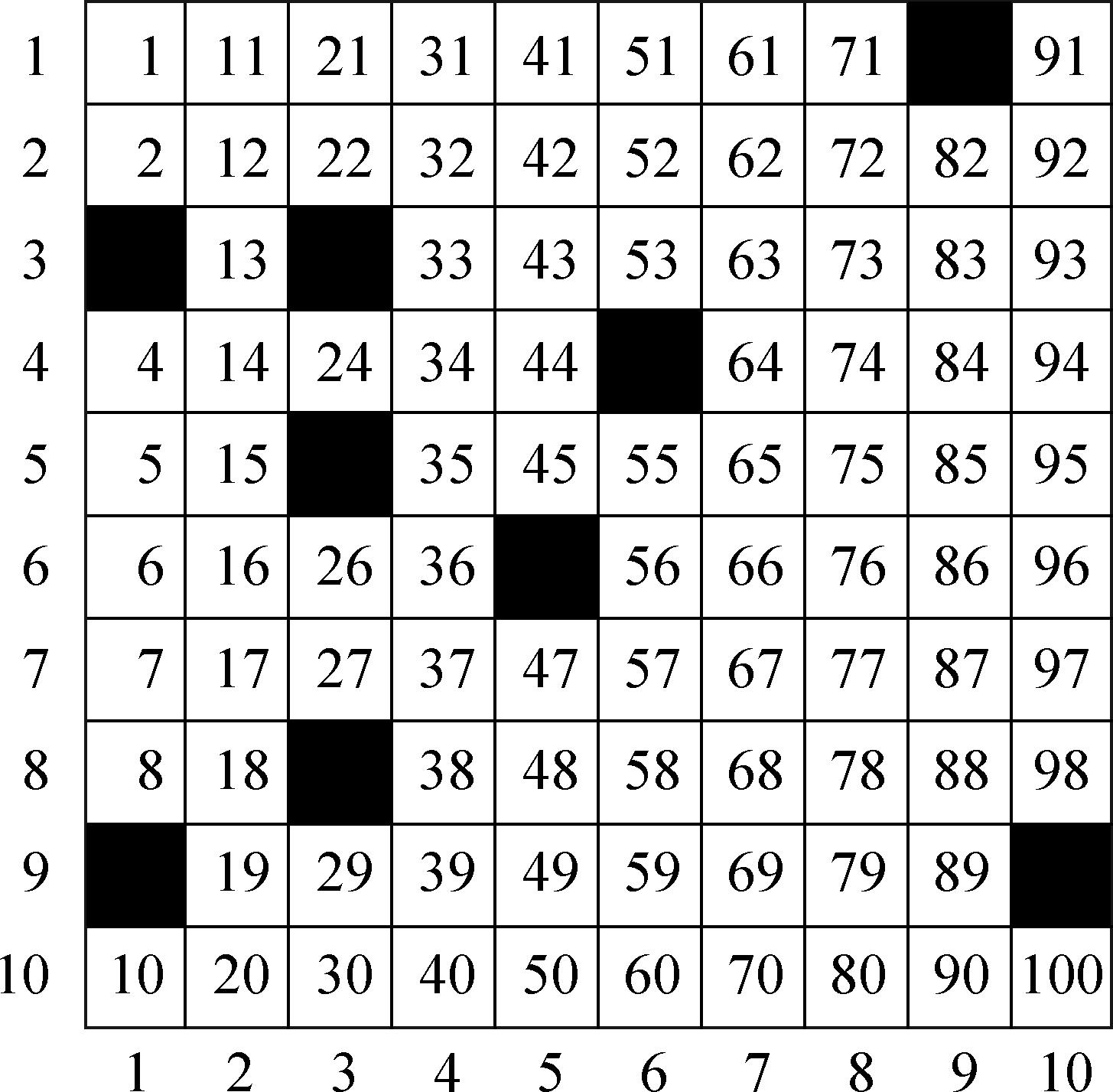
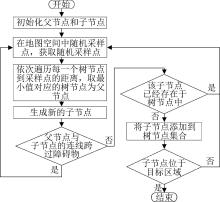
Fig. 2
Flowchart of RRT algorithm
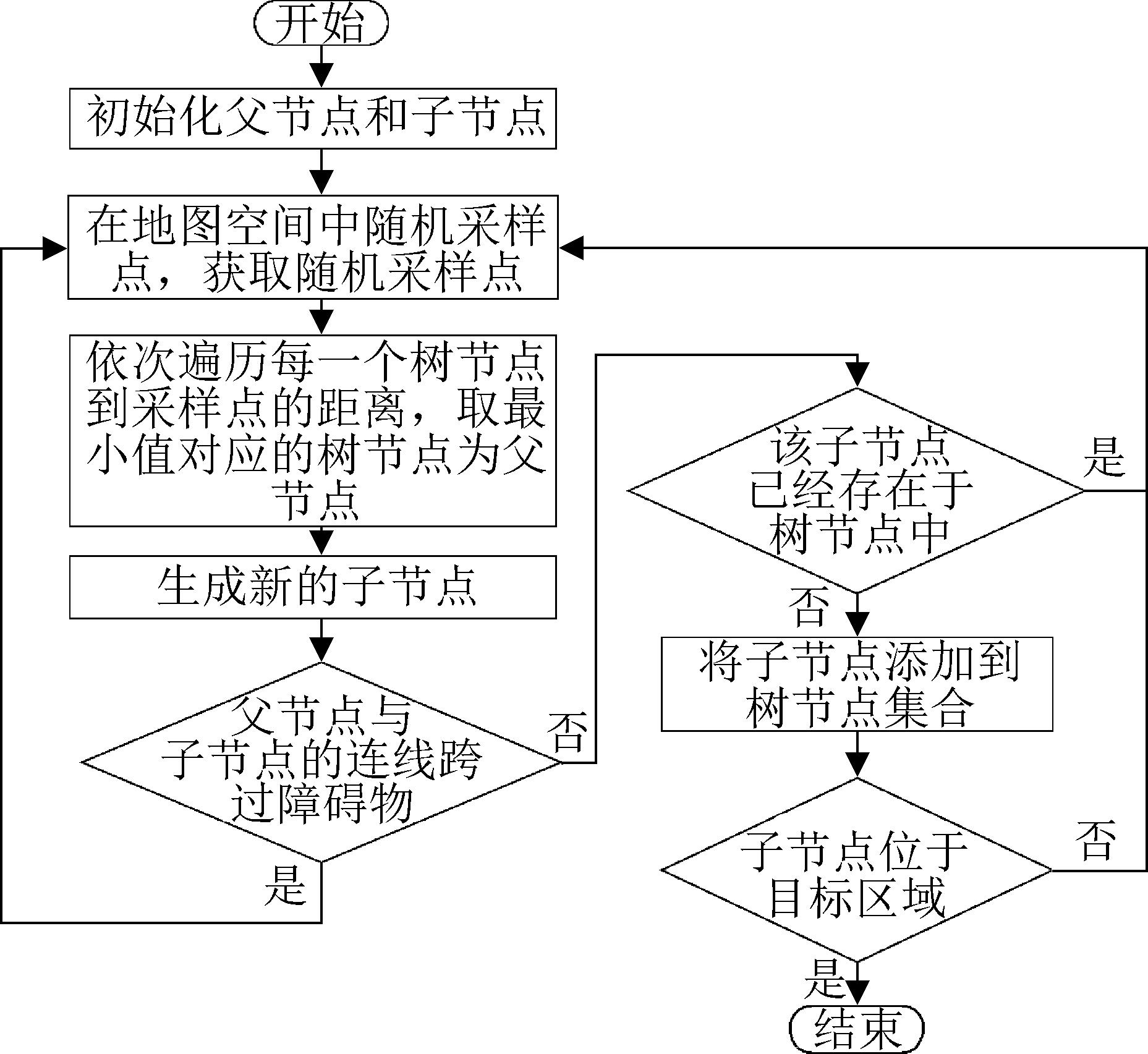

Fig. 3
Limit sampling interval
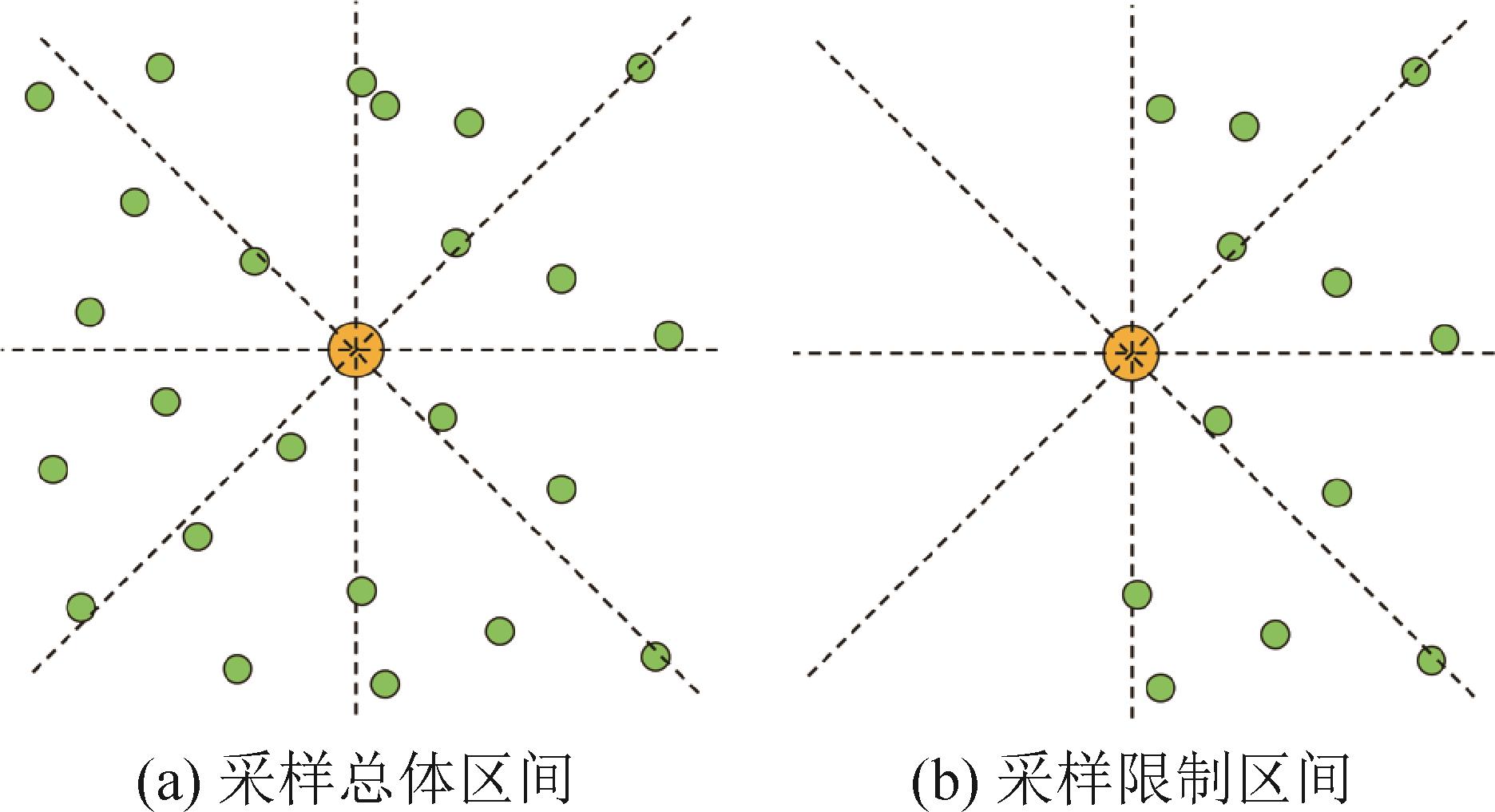
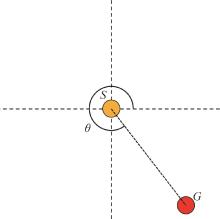
Fig. 4
Determine location
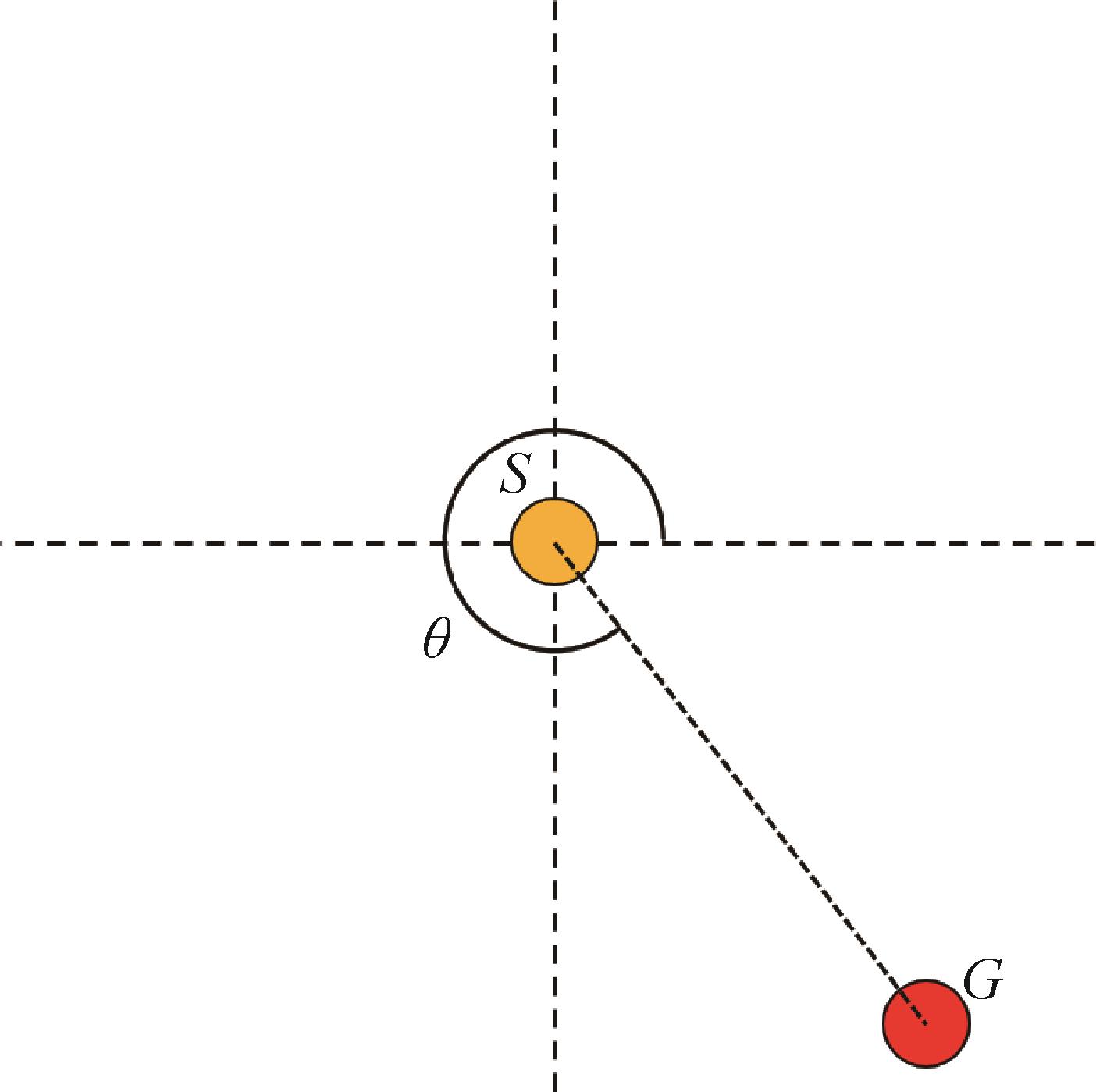
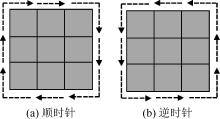
Fig. 5
Two types of flow
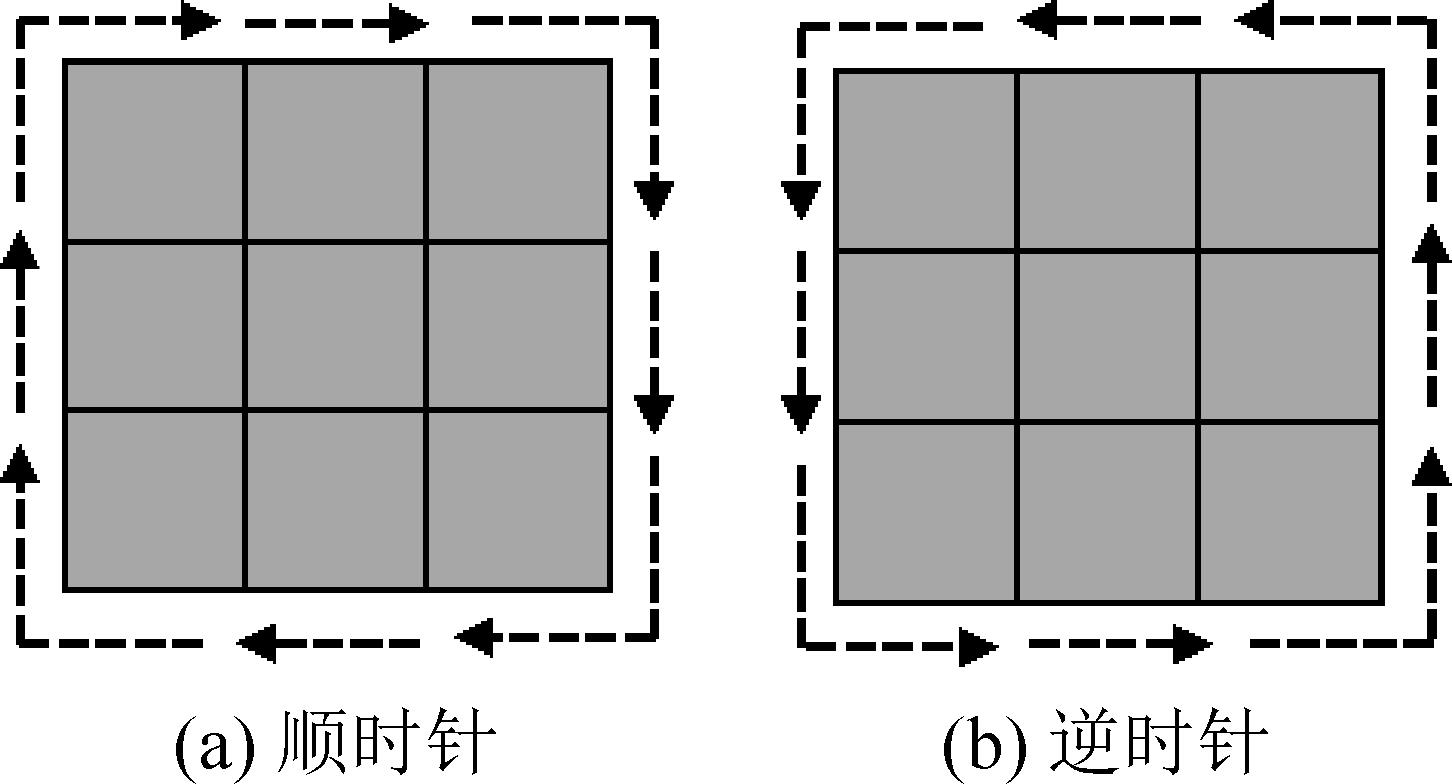

Fig. 6
Clockwise flow types


Fig. 7
Counter-clockwise flow types
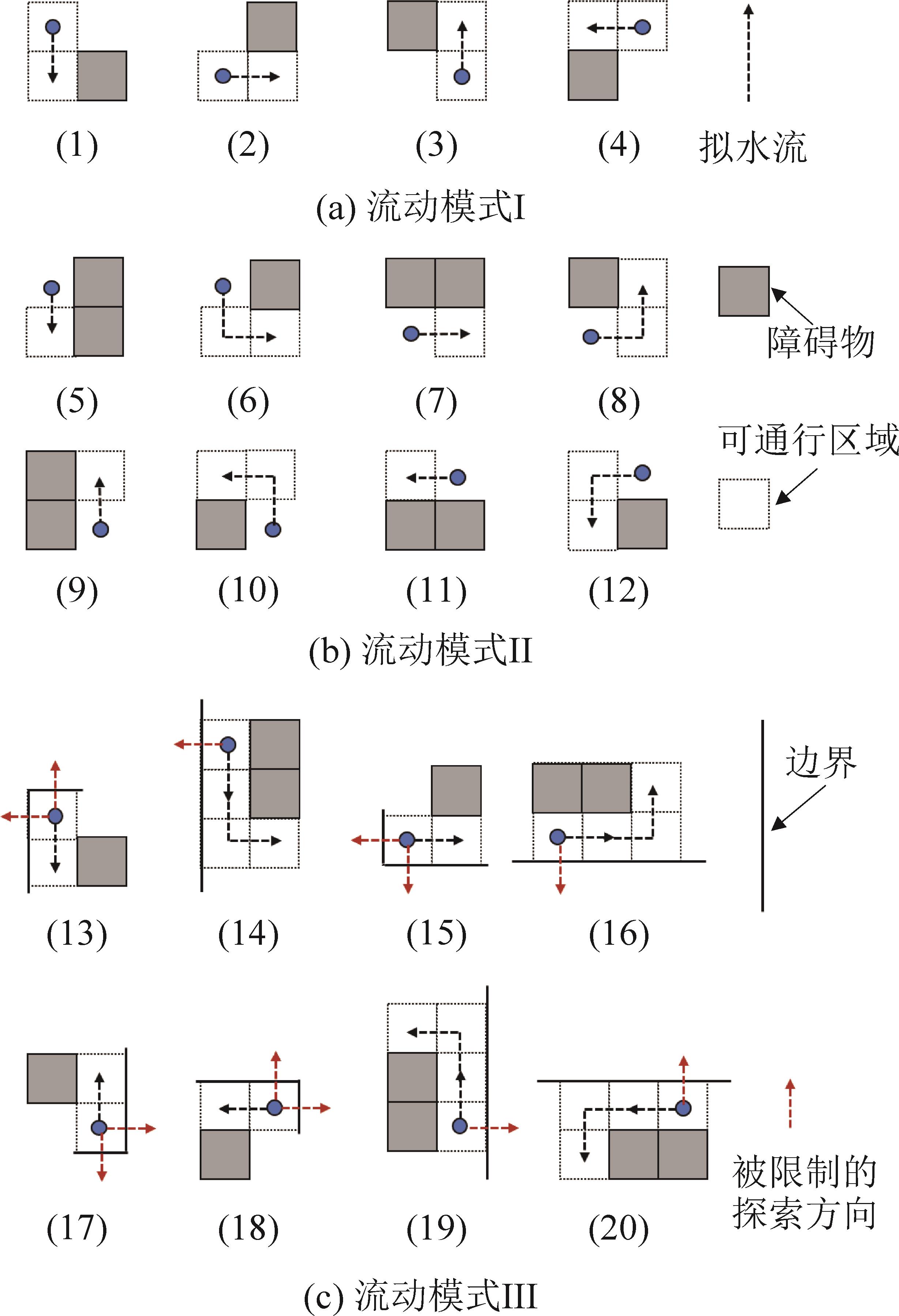
Table 1
Correspondence table of code meaning
| 流动条件 | 含义 | 符号 |
|---|---|---|
| field [i, j+1] | 向右搜索 | R |
| field [i+1, j] | 向下搜索 | D |
| field [i, j-1] | 向左搜索 | L |
| field [i-1, j] | 向上搜索 | U |
| field [i+1, j+1] | 向右下搜索 | RD |
| field [i-1, j+1] | 向右上搜索 | RU |
| field [i+1, j-1] | 向左下搜索 | LD |
| field [i-1, j-1] | 向左上搜索 | LU |
| = 0 | 搜索结果为可通行区域 | 0 |
| = 1 | 搜索结果为可障碍物 | 1 |
Table 2
Correspondence table of flow conditions (clockwise)
| 流动 | 模式 | 极端限定条件 | 流动条件 |
|---|---|---|---|
| M1- | \ | U0, RU1, R0 | |
| M2- | \ | R1, RU1, U0 | |
| M3- | j=0 | R1, RU1, U0 | |
| M3- | j=0 & i=R | RU1, U0 | |
| M2- | \ | R1, U0, RU0 | |
| M3- | j=0 | R1, U0, RU0 | |
| M1- | \ | R0, RD1, D0 | |
| M2- | \ | D1, RD1, R0 | |
| M3- | i=0 | D1, RD1, R0 | |
| M3- | i=0 & j=0 | RD1, R0 | |
| M2- | \ | D1, RD0, R0 | |
| M3- | i=0 | D1, R0, RD0 | |
| M1- | \ | D0, LD1, L0 | |
| M2- | \ | L1, LD1, D0 | |
| M3- | j=C | L1, LD1, D0 | |
| M3- | i=0 & j=C | LD1, D0 | |
| M2- | \ | L1, D0, LD0 | |
| M3- | j=C | L1, LD0, D0 | |
| M1- | \ | L0, LU1, U0 | |
| M2- | \ | U1, LU1, L0 | |
| M3- | i=R | U1, LU1, L0 | |
| M3- | i=R & j=C | LU1, L0 | |
| M2- | \ | U1, L0, LU0 | |
| M3- | i=R | U1, LU0, L0 |
Table 3
Correspondence table of flow conditions (counter-clockwise)
| 流动 | 模式 | 极端限定条件 | 流动条件 |
|---|---|---|---|
| M1- | \ | D0, RD1, R0 | |
| M2- | \ | R1, RD1, D0 | |
| M3- | j=0 | R1, RD1, D0 | |
| M3- | j=0 & i=0 | RD1, D0 | |
| M2- | \ | R1, RD0, D0 | |
| M3- | j=0 | R1, D0, RD0 | |
| M1- | \ | R0, RU1, U0 | |
| M2- | \ | U1, RU1, R0 | |
| M3- | i=R | U1, RU1, R0 | |
| M3- | i=R & j=0 | RU1, R0 | |
| M2- | \ | U1, R0, RU0 | |
| M3- | i=R | U1, R0, RU0 | |
| M1- | \ | U0, LU1, L0 | |
| M2- | \ | L1, LU1, U0 | |
| M3- | j=C | L1, LU1, U0 | |
| M3- | i=R & j=C | LU1, U0 | |
| M2- | \ | L1, U0, LU0 | |
| M3- | j=C | L1, LU0, U0 | |
| M1- | \ | L0, LD1, D0 | |
| M2- | \ | D1, LD1, L0 | |
| M3- | i=0 | D1, LD1, L0 | |
| M3- | i=0 & j=C | LD1, L0 | |
| M2- | \ | D1, L0, LD0 | |
| M3- | i=0 | D1, LD0, L0 |
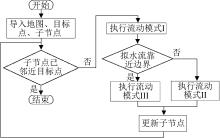
Fig. 8
Flowchart of QS


Fig. 9
Schematic diagram of QS
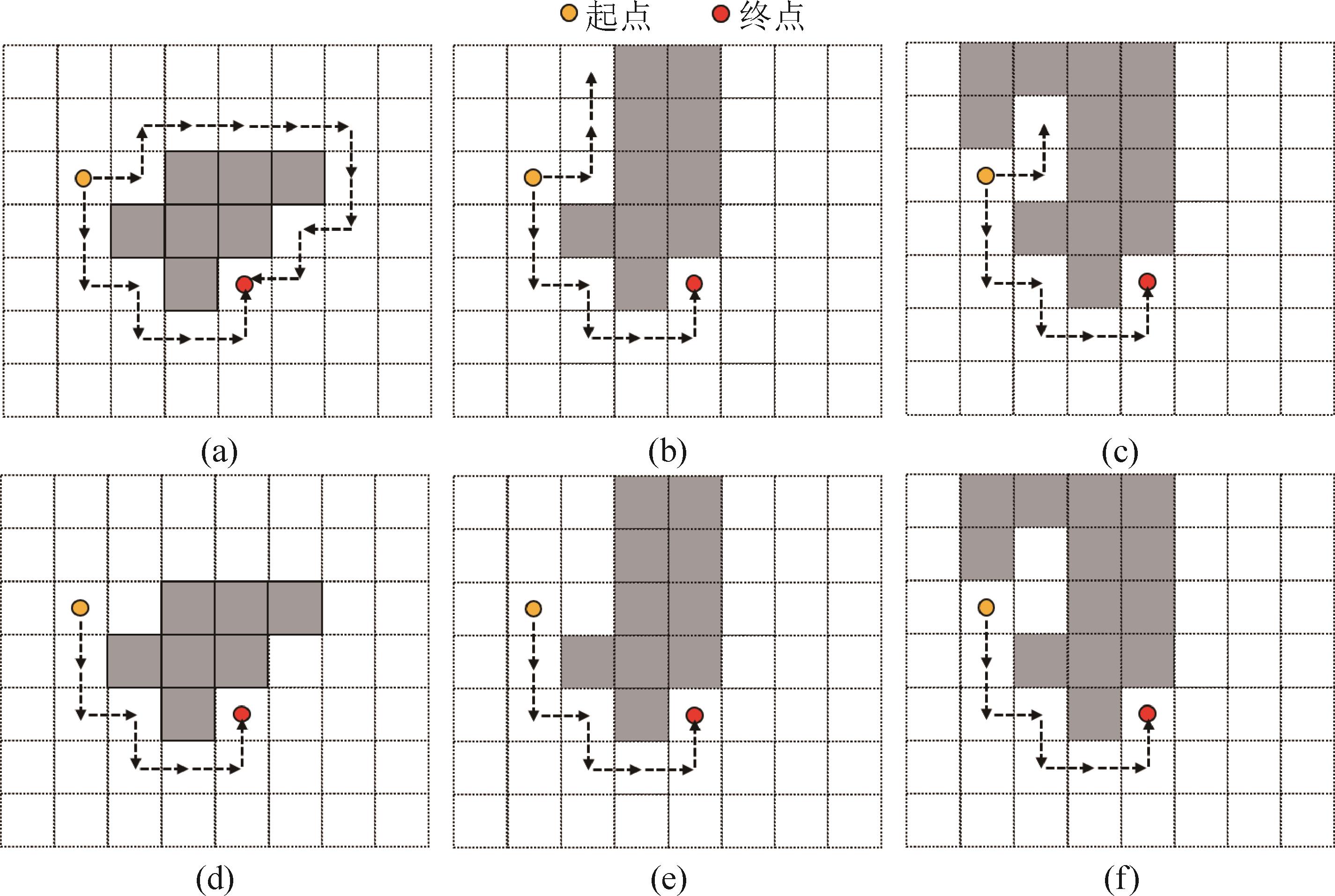

Fig. 10
Algorithm obstacle avoidance of QSA*
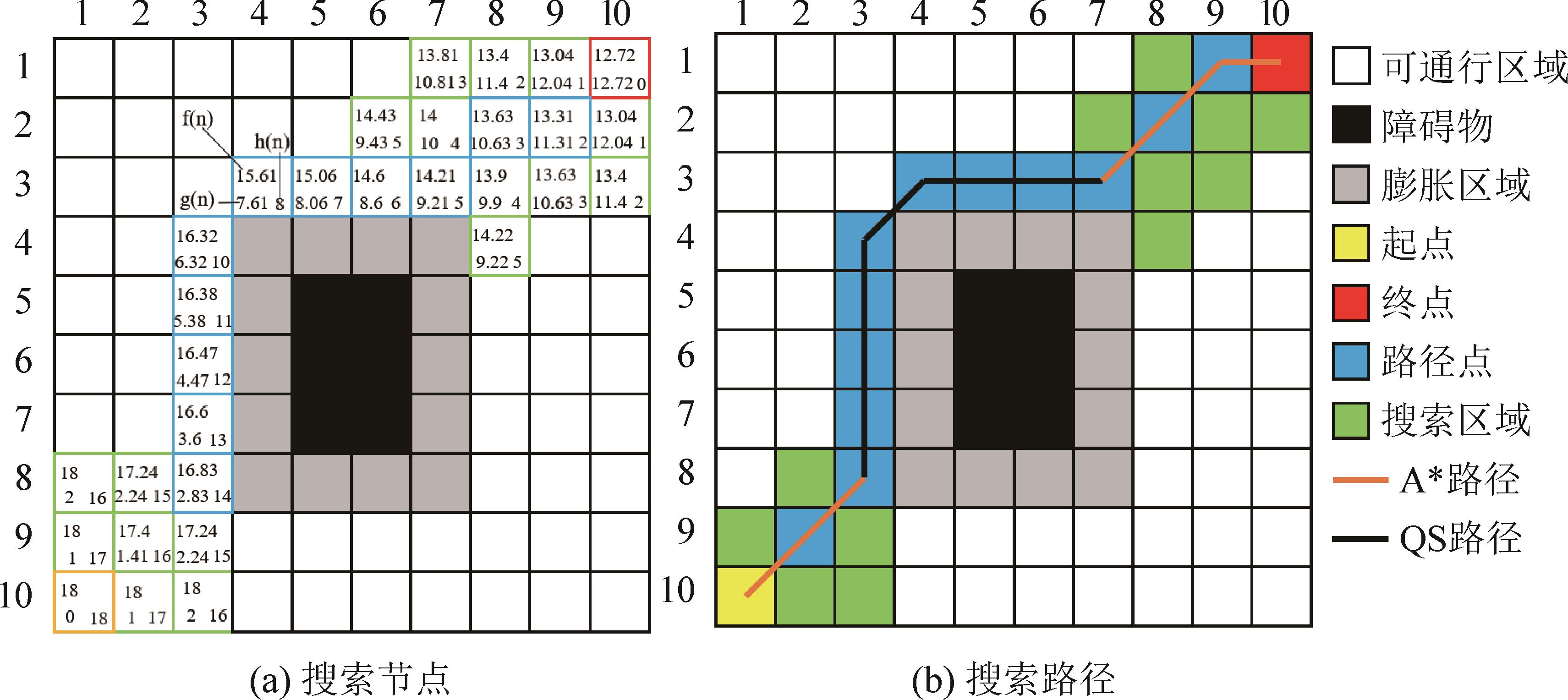
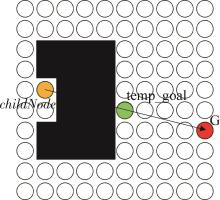
Fig. 11
Search for temporary target
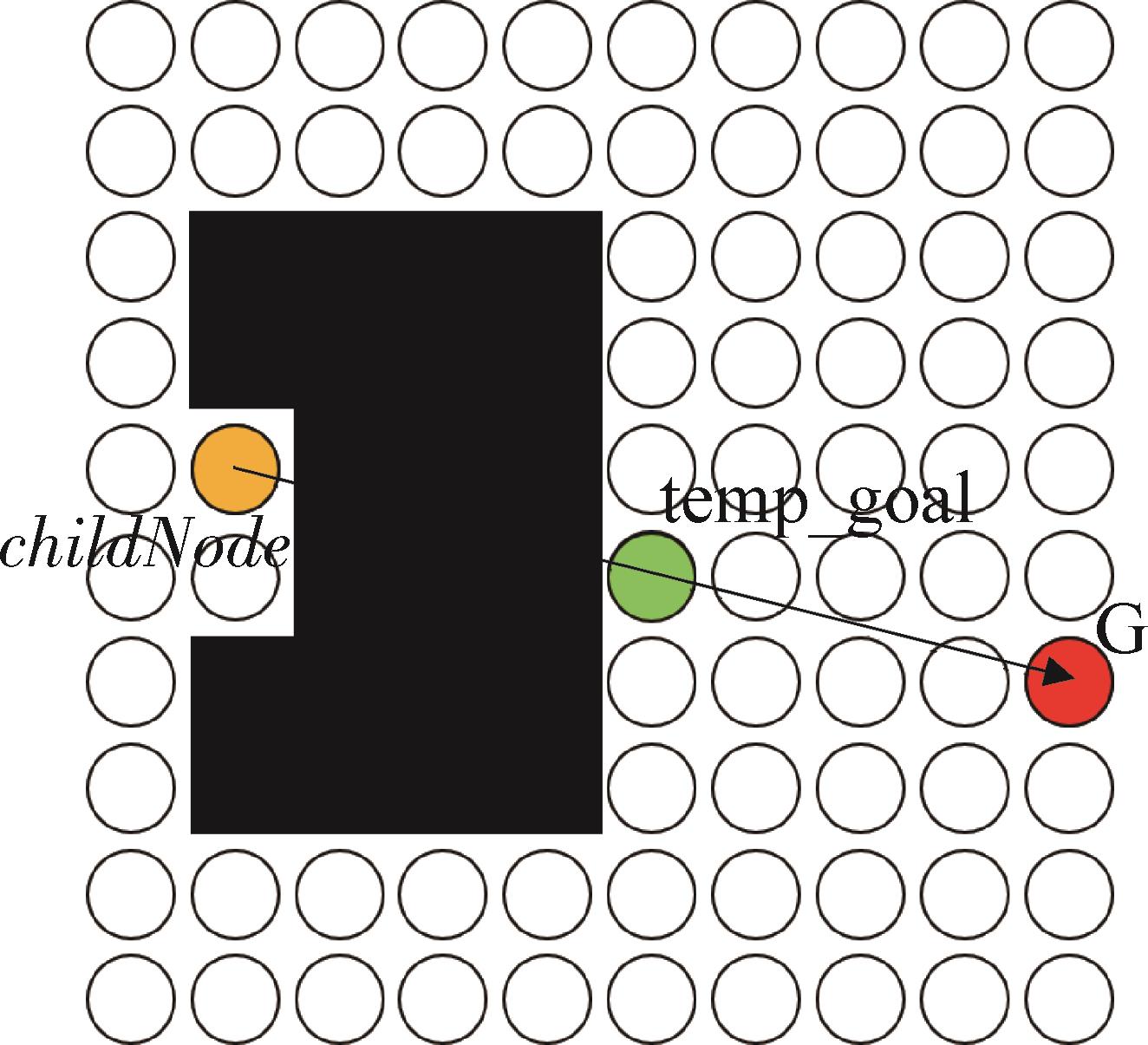
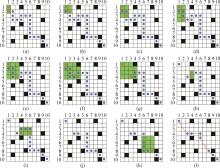
Fig. 12
Schematic diagram of path optimization
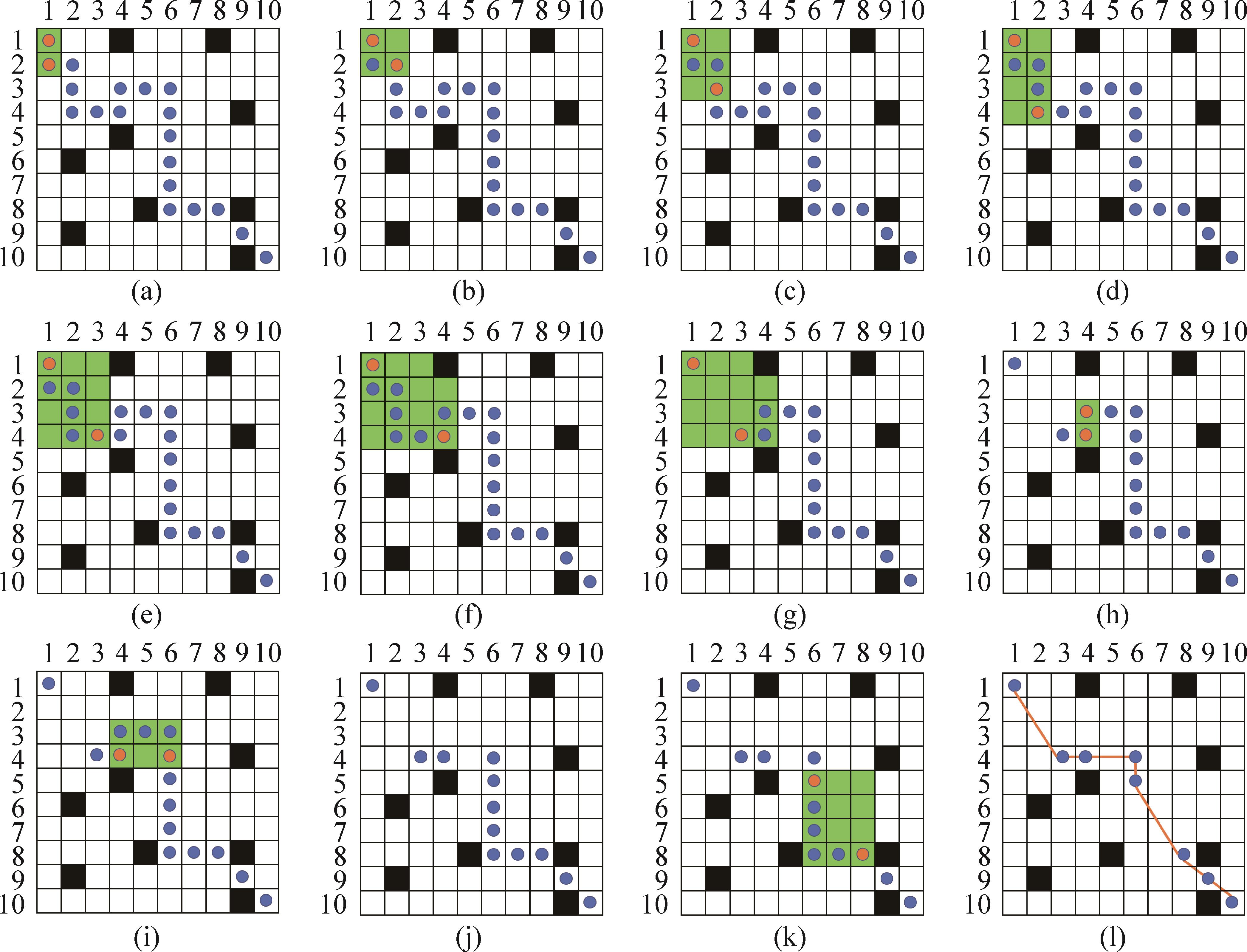
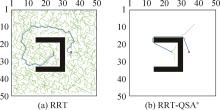
Fig. 13
Maze map-Ⅰ

Table 4
Algorithms statistics comparison (maze map-I)
| 指标 | RRT | |||
|---|---|---|---|---|
| 时间/s | 路径长度 | 节点数 | 转折角度/(°) | |
| 均值 | 0.25 | 87.74 | 483.80 | 1 861.75 |
| 标准差 | 0.26 | 3.27 | 206.32 | 251.30 |
| 最大值 | 0.87 | 110.65 | 878 | 2 252.23 |
| 最小值 | 0.02 | 72.15 | 185 | 1 513.73 |
| 指标 | RRT-QSA* | |||
| 时间/s | 路径长度 | 节点数 | 转折角度/(°) | |
| 均值 | 0.004 | 42.86 | 50.67 | 305.51 |
| 标准差 | 0.003 | 1.79 | 2.72 | 6.95 |
| 最大值 | 0.015 | 46.45 | 53 | 308.99 |
| 最小值 | 0.002 | 41.96 | 45 | 291.59 |
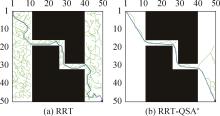
Fig. 14
Narrow passage map
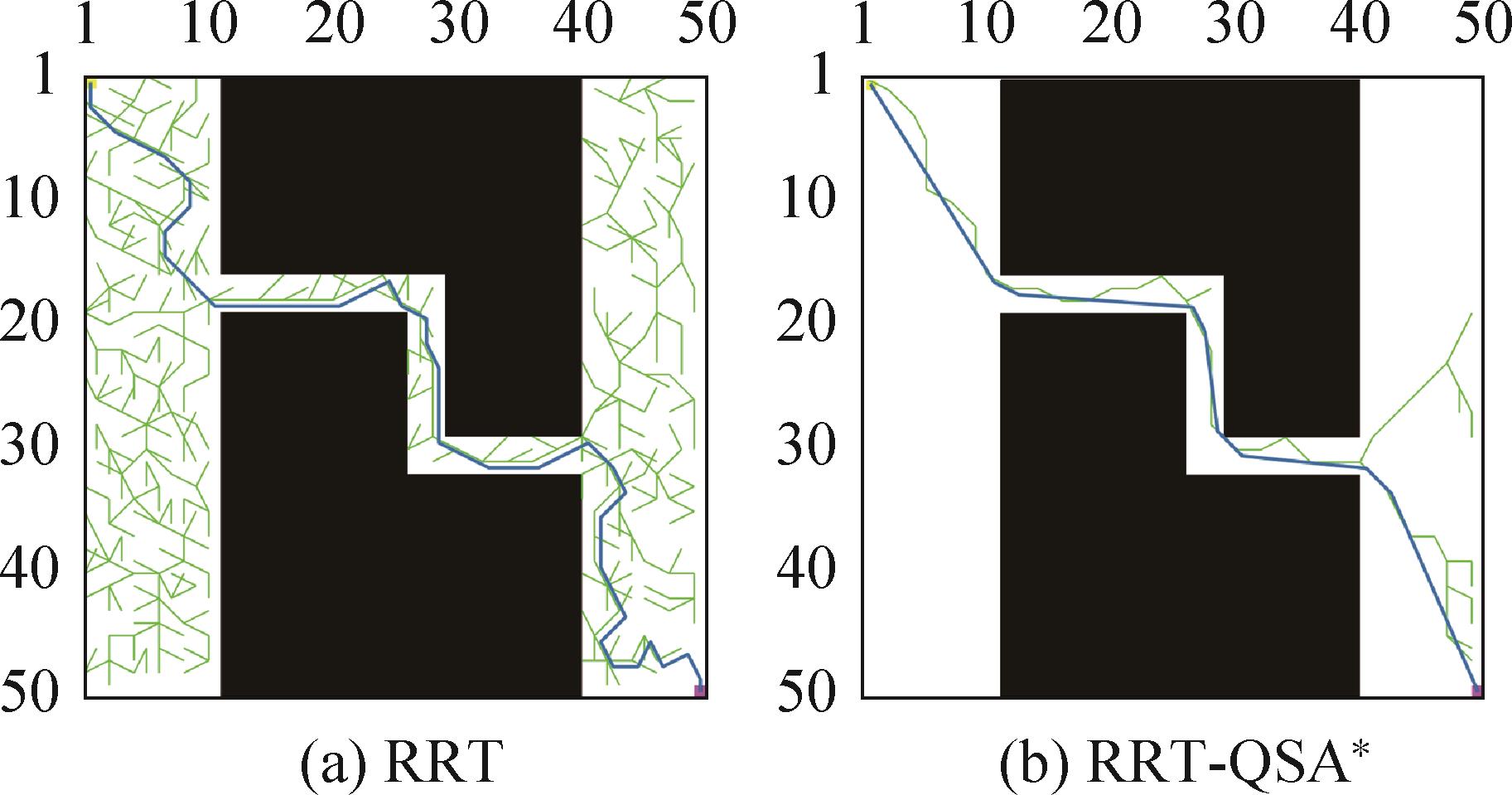
Table 5
Algorithms statistics comparison (narrow passage map)
| 指标 | RRT | RRT-QSA* | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 时间/s | 路径长度 | 节点数 | 转折角度/(°) | 时间/s | 路径长度 | 节点数 | 转折角度/(°) | ||
| 均值 | 0.20 | 89.89 | 387.80 | 1 804.36 | 0.03 | 81.91 | 74.40 | 377.35 | |
| 标准差 | 0.16 | 3.27 | 81.42 | 114.65 | 0.01 | 2.09 | 47.36 | 42.26 | |
| 最大值 | 0.66 | 95.09 | 547 | 1 988.53 | 0.03 | 86.35 | 216 | 470.11 | |
| 最小值 | 0.05 | 84.61 | 243 | 1 632.59 | 0.02 | 78.52 | 53 | 321.51 | |
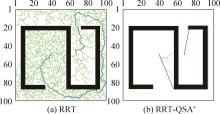
Fig. 15
Maze map-Ⅱ
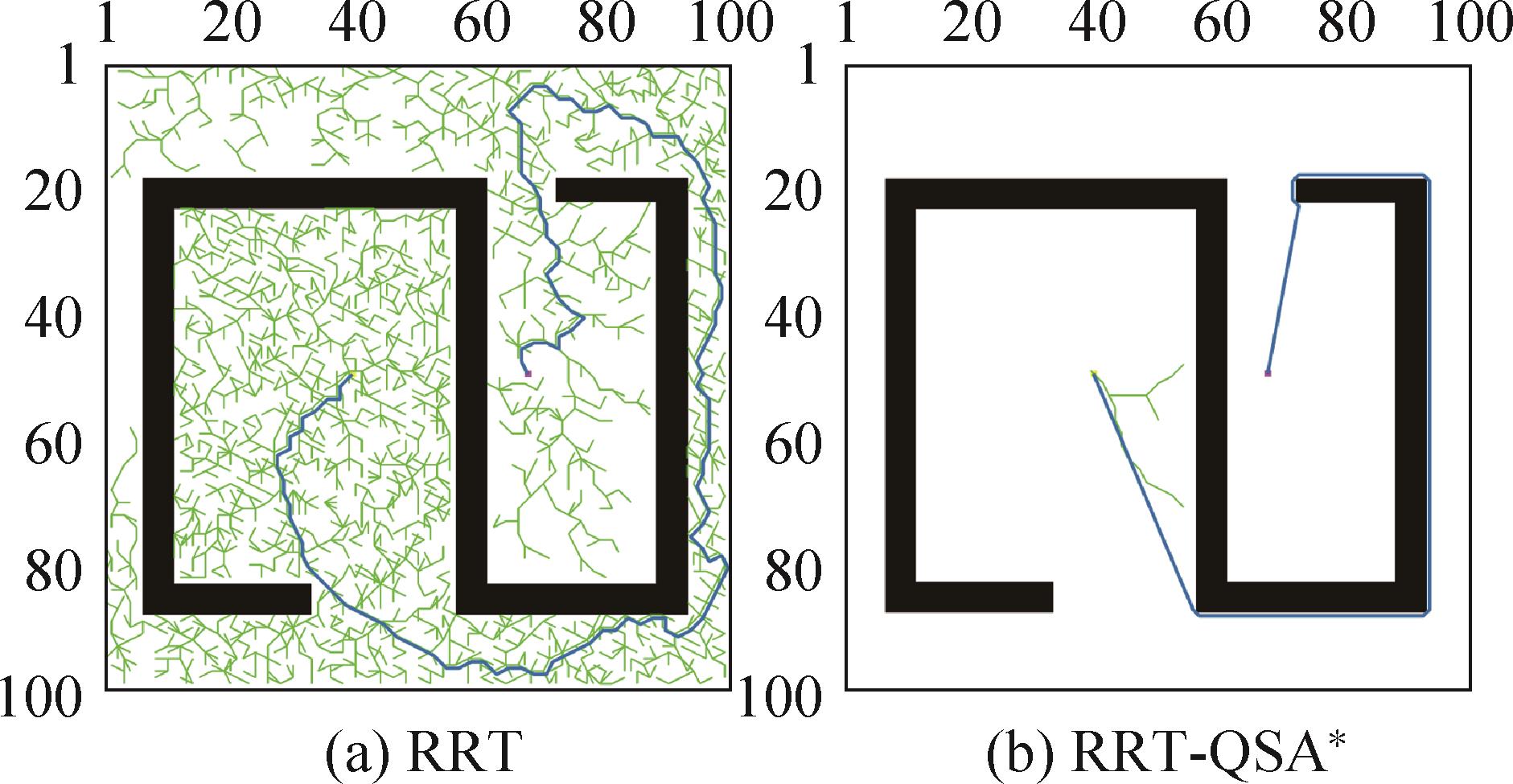
Table 6
Algorithms statistics comparison (maze map-II)
| 指标 | RRT | RRT-QSA* | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 时间/s | 路径长度 | 节点数 | 转折角度/(°) | 时间/s | 路径长度 | 节点数 | 转折角度/(°) | ||
| 均值 | 6.20 | 279.82 | 2 205.86 | 4 639.15 | 0.013 | 203.76 | 312.50 | 438.32 | |
| 标准差 | 5.50 | 16.66 | 728.86 | 387.67 | 0.002 | 2.36 | 9.20 | 6.95 | |
| 最大值 | 21.49 | 309.60 | 3 745 | 5 363.13 | 0.017 | 208.87 | 326 | 490.75 | |
| 最小值 | 1.64 | 250.98 | 1 217 | 4 064.18 | 0.001 | 201.45 | 297 | 419.63 | |
Table 7
Algorithms statistics comparison (different maps)
| 参数 | 算法 | 50×50 | 100×100 | 150×150 | 200×200 |
|---|---|---|---|---|---|
| 时间/s | RRT | 0.41 | 3.39 | 32.62 | 102.39 |
| RRT-QSA* | 0.013 | 0.07 | 0.14 | 0.16 | |
| A* | 0.013 | 0.04 | 0.07 | 0.12 | |
| 转折点数 | RRT | 553 | 1 714 | 5 074 | 9 331 |
| RRT-QSA* | 74 | 183 | 269 | 372 | |
| A* | 225 | 431 | 680 | 951 | |
| 路径长度 | RRT | 94.1 | 183.67 | 283.78 | 349.82 |
| RRT-QSA* | 78.3 | 159.39 | 244.71 | 315.18 | |
| A* | 76.9 | 173.39 | 242.93 | 299.59 | |
| 转折角度/(°) | RRT | 1 767 | 3 440 | 5 383 | 6 713 |
| RRT-QSA* | 337 | 290 | 599 | 467 | |
| A* | 279 | 242 | 451.9 | 448.21 |
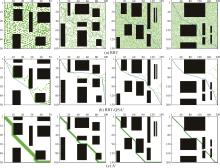
Fig. 16
Simulation results of each algorithm in different maps
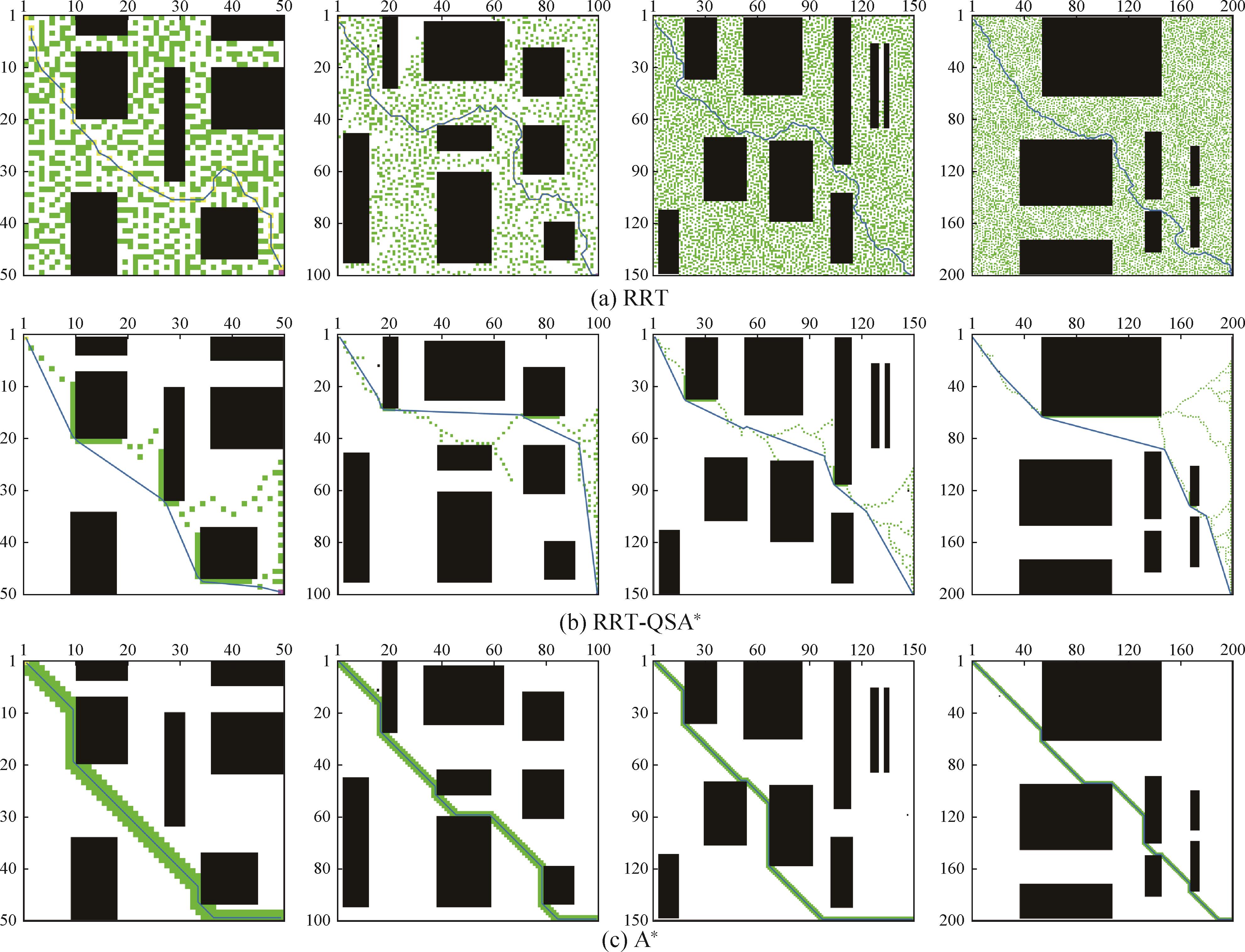

Fig. 17
Performance comparison of each algorithm in different maps
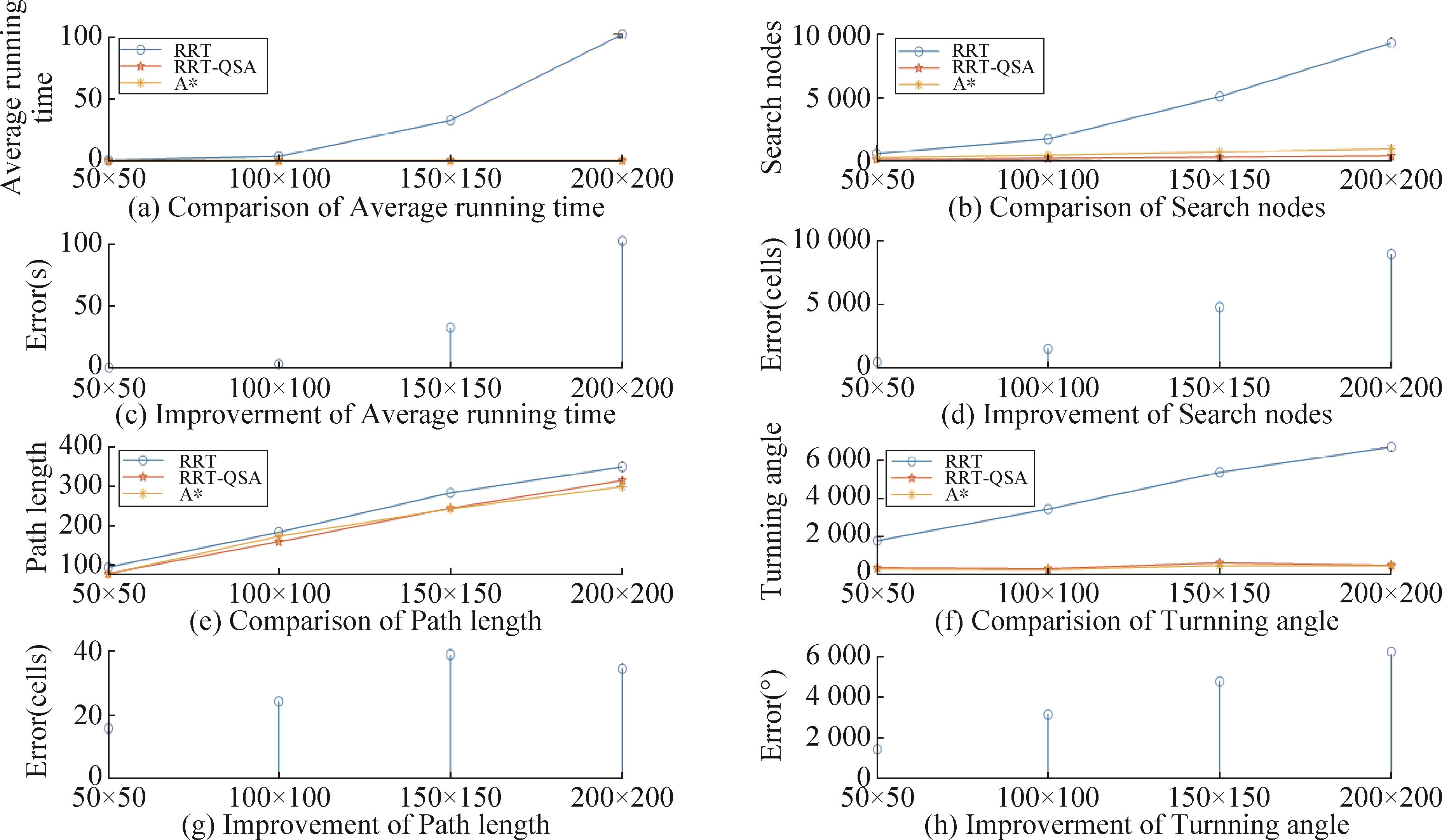
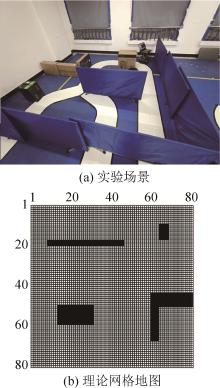
Fig. 18
Experimental scenes and theoretical grid maps
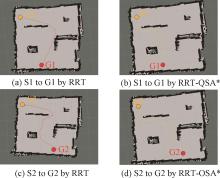
Fig. 19
Path planning results of RRT-QSA* and RRT algorithms

Table 8
Comparison of searching time
| 算法 | S1-G1 | S2-G2 |
|---|---|---|
| RRT | 1.5309 | 2.0347 |
| RRT-QSA* | 0.0326 | 0.0365 |
| 1 | Patle B K, Ganesh Babu L, Pandey Anish, et al. A Review: On Path Planning Strategies for Navigation of Mobile Robot[J]. Defence Technology, 2019, 15(4): 582-606. |
| 2 | Liu Lixing, Wang Xu, Yang Xin, et al. Path Planning Techniques for Mobile Robots: Review and Prospect[J]. Expert Systems with Applications, 2023, 227: 120254. |
| 3 | 林韩熙, 向丹, 欧阳剑, 等. 移动机器人路径规划算法的研究综述[J]. 计算机工程与应用, 2021, 57(18): 38-48. |
| Lin Hanxi, Xiang Dan, Ouyang Jian, et al. Review of Path Planning Algorithms for Mobile Robots[J]. Computer Engineering and Applications, 2021, 57(18): 38-48. | |
| 4 | Dijkstra E W. A Note on Two Problems in Connexion with Graphs[J]. Numerische Mathematik, 1959, 1(1): 269-271. |
| 5 | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 6 | Koenig S, Likhachev M. Fast Replanning for Navigation in Unknown Terrain[J]. IEEE Transactions on Robotics, 2005, 21(3): 354-363. |
| 7 | Lavalle S M. Rapidly-exploring Random Trees: A New Tool for Path Planning[J]. Research Report, 1999, 98(11): 1-4. |
| 8 | Wang Jiankun, Meng M Q H, Khatib O. EB-RRT: Optimal Motion Planning for Mobile Robots[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(4): 2063-2073. |
| 9 | Liao Bin, Wan Fangyi, Hua Yi, et al. F-RRT*: An Improved Path Planning Algorithm with Improved Initial Solution and Convergence Rate[J]. Expert Systems with Applications, 2021, 184: 115457. |
| 10 | 陈秋莲, 蒋环宇, 郑以君. 机器人路径规划的快速扩展随机树算法综述[J]. 计算机工程与应用, 2019, 55(16): 10-17. |
| Chen Qiulian, Jiang Huanyu, Zheng Yijun. Summary of Rapidly-exploring Random Tree Algorithm in Robot Path Planning[J]. Computer Engineering and Applications, 2019, 55(16): 10-17. | |
| 11 | 赵文龙, Yahouza M Sani Abdou. 基于改进RRT算法的移动机器人路径规划方法[J]. 计算机与数字工程, 2022, 50(8): 1733-1738. |
| Zhao Wenlong, Yahouza M Sani Abdou. Path Planning Method Based on Improved RRT Algorithm for Mobile Robot[J]. Computer & Digital Engineering, 2022, 50(8): 1733-1738. | |
| 12 | 张伟民, 付仕雄. 基于改进RRT*算法的移动机器人路径规划[J]. 华中科技大学学报(自然科学版), 2021, 49(1): 31-36. |
| Zhang Weimin, Fu Shixiong. Mobile Robot Path Planning Based on Improved RRT* Algorithm[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2021, 49(1): 31-36. | |
| 13 | Li Yanjie, Wei Wu, Gao Yong, et al. PQ-RRT*: An Improved Path Planning Algorithm for Mobile Robots[J]. Expert Systems with Applications, 2020, 152: 113425. |
| 14 | Wang Jiankun, Li Baopu, Meng M Q H. Kinematic Constrained Bi-directional RRT with Efficient Branch Pruning for Robot Path Planning[J]. Expert Systems with Applications, 2021, 170: 114541. |
| 15 | Zhou Ying, Zhang Endong, Guo Hongling, et al. Lifting Path Planning of Mobile Cranes Based on an Improved RRT Algorithm[J]. Advanced Engineering Informatics, 2021, 50: 101376. |
| 16 | 张瑞, 周丽, 刘正洋. 融合RRT*与DWA算法的移动机器人动态路径规划[J/OL]. 系统仿真学报. (2023-03-24) [2024-03-18]. . |
| Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach[J/OL]. Journal of System Simulation. (2023-03-24) [2024-03-18]. . | |
| 17 | Miao Changwei, Chen Guangzhu, Yan Chengliang, et al. Path Planning Optimization of Indoor Mobile Robot Based on Adaptive Ant Colony Algorithm[J]. Computers & Industrial Engineering, 2021, 156: 107230. |
| 18 | 孙瑞, 张文胜. 基于改进蚁群算法的移动机器人平滑路径规划[J]. 图学学报, 2019, 40(2): 344-350. |
| Sun Rui, Zhang Wensheng. Smooth Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Journal of Graphics, 2019, 40(2): 344-350. | |
| 19 | Zhong Xunyu, Tian Jun, Hu Huosheng, et al. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-scale Dynamic Environment[J]. Journal of Intelligent & Robotic Systems, 2020, 99(1): 65-77. |
| 20 | Li Changgeng, Huang Xia, Ding Jun, et al. Global Path Planning Based on a Bidirectional Alternating Search A* Algorithm for Mobile Robots[J]. Computers & Industrial Engineering, 2022, 168: 108123. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
