

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (10): 2423-2434.doi: 10.16182/j.issn1004731x.joss.23-0768
• Papers • Previous Articles Next Articles
Guo Minghao1, Ji Peng1, Huang Haiwei2
Received:2023-06-26
Revised:2023-08-23
Online:2024-10-15
Published:2024-10-18
Contact:
Ji Peng
CLC Number:
Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method[J]. Journal of System Simulation, 2024, 36(10): 2423-2434.

Fig. 1
Safety ellipse
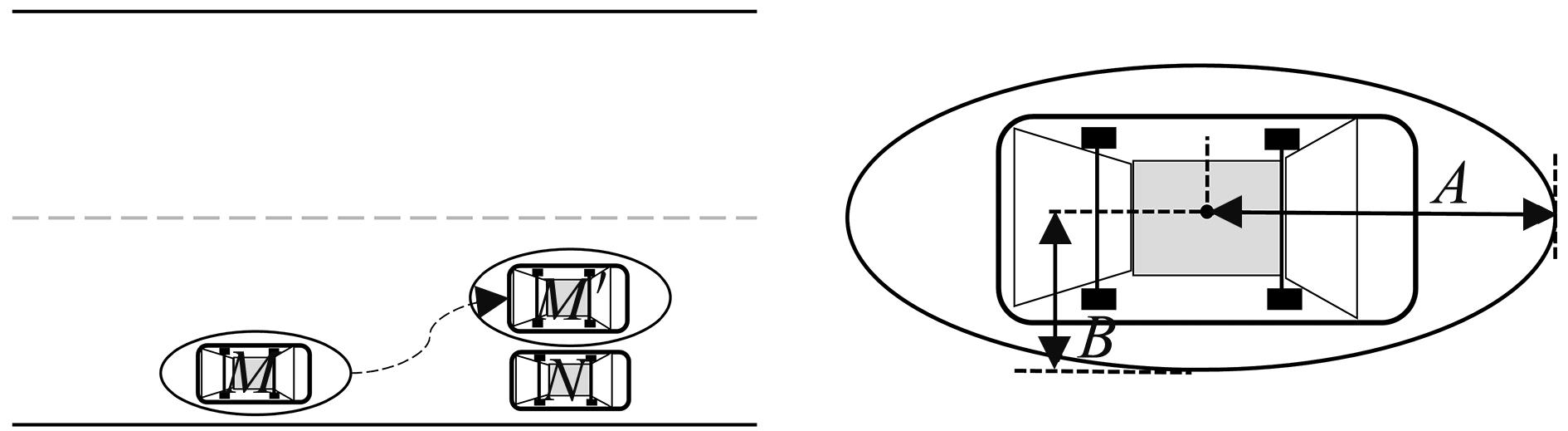
Fig. 2
Resolving middle equilibrium


Fig. 3
Resolving long paths
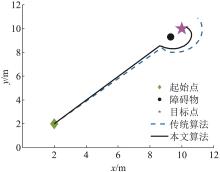
Fig. 4
Solving target unreachability
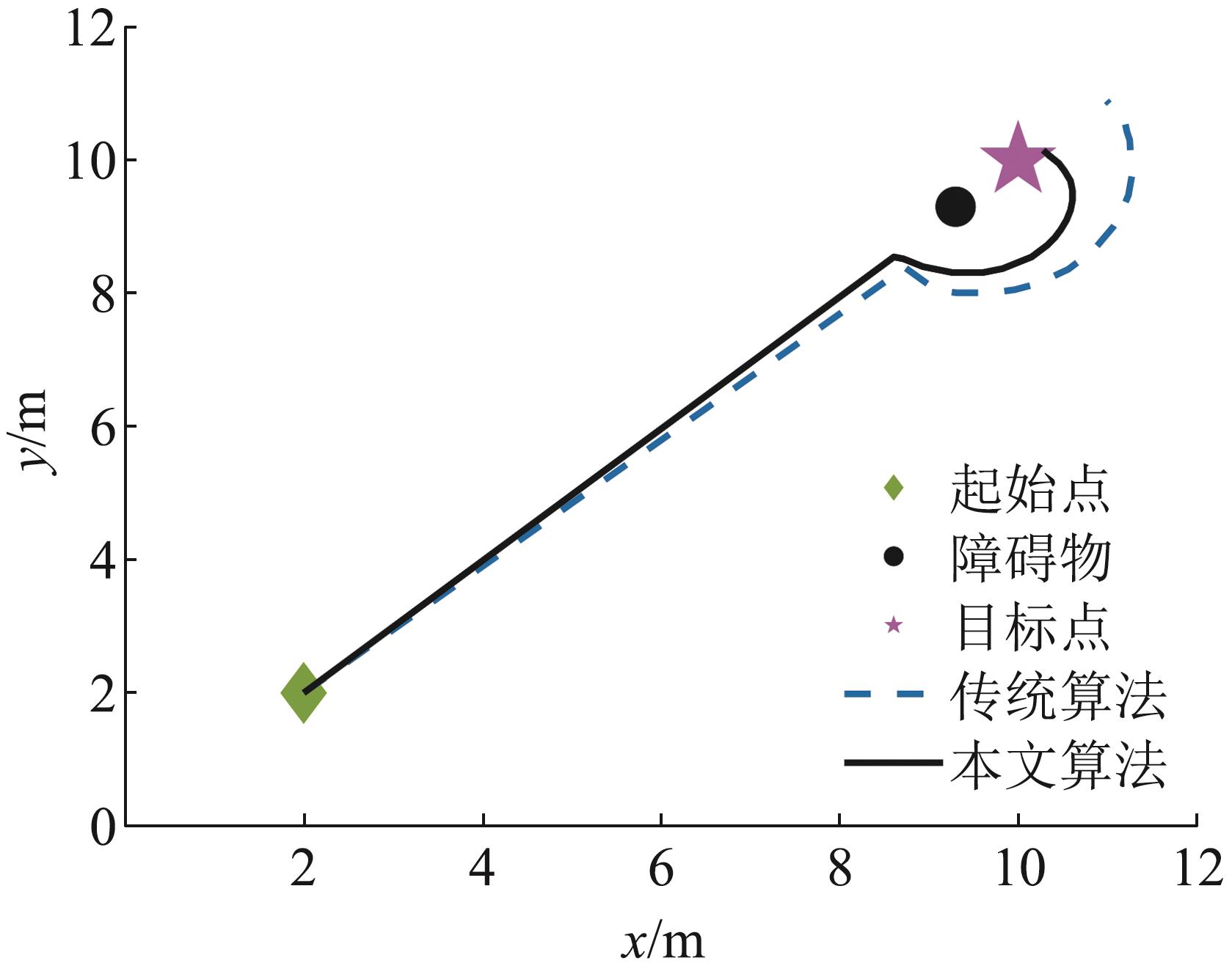
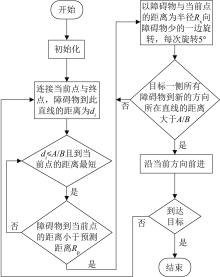
Fig. 5
Flow chart of prediction distance algorithm
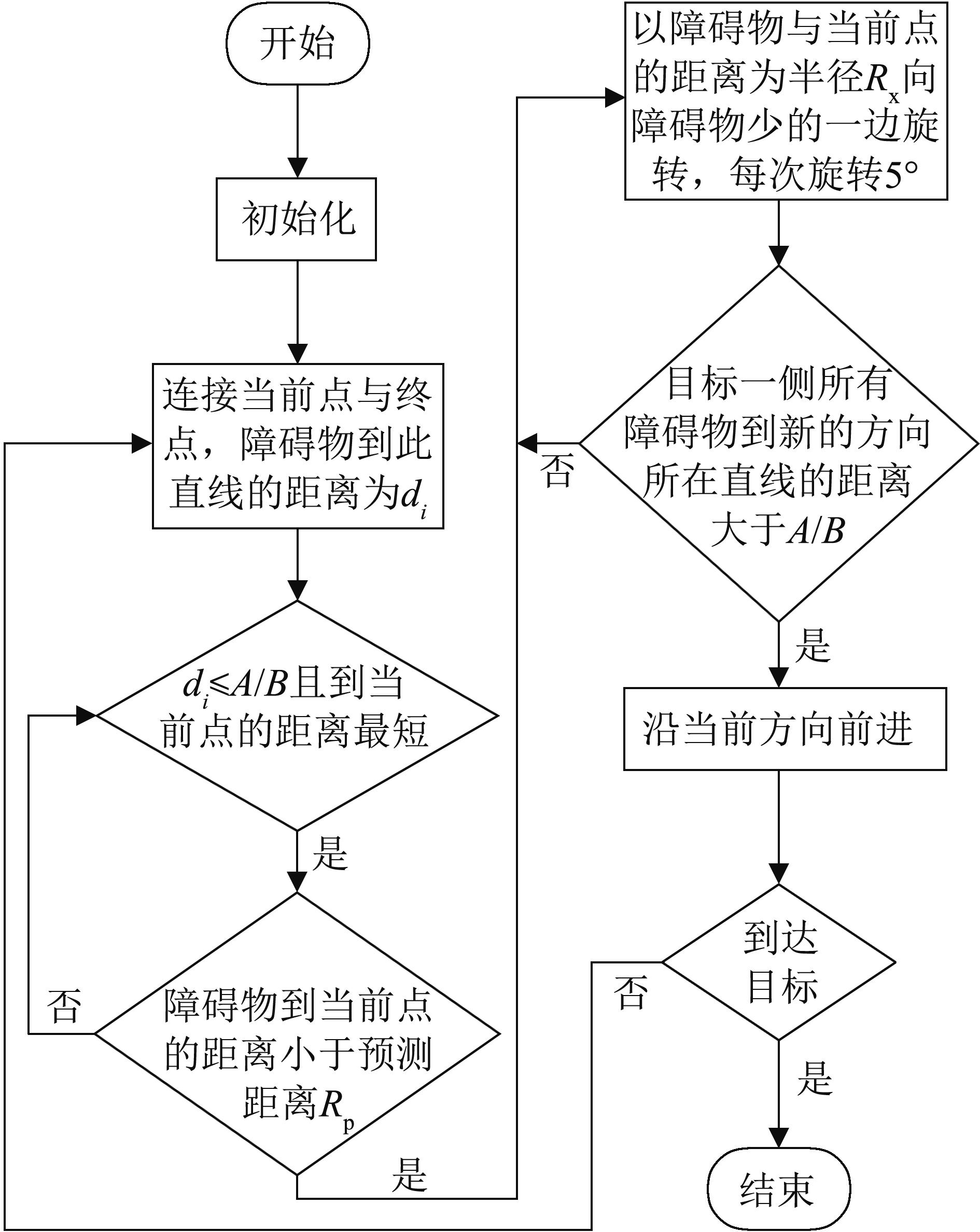

Fig. 6
Solve stuck U-shaped obstacle
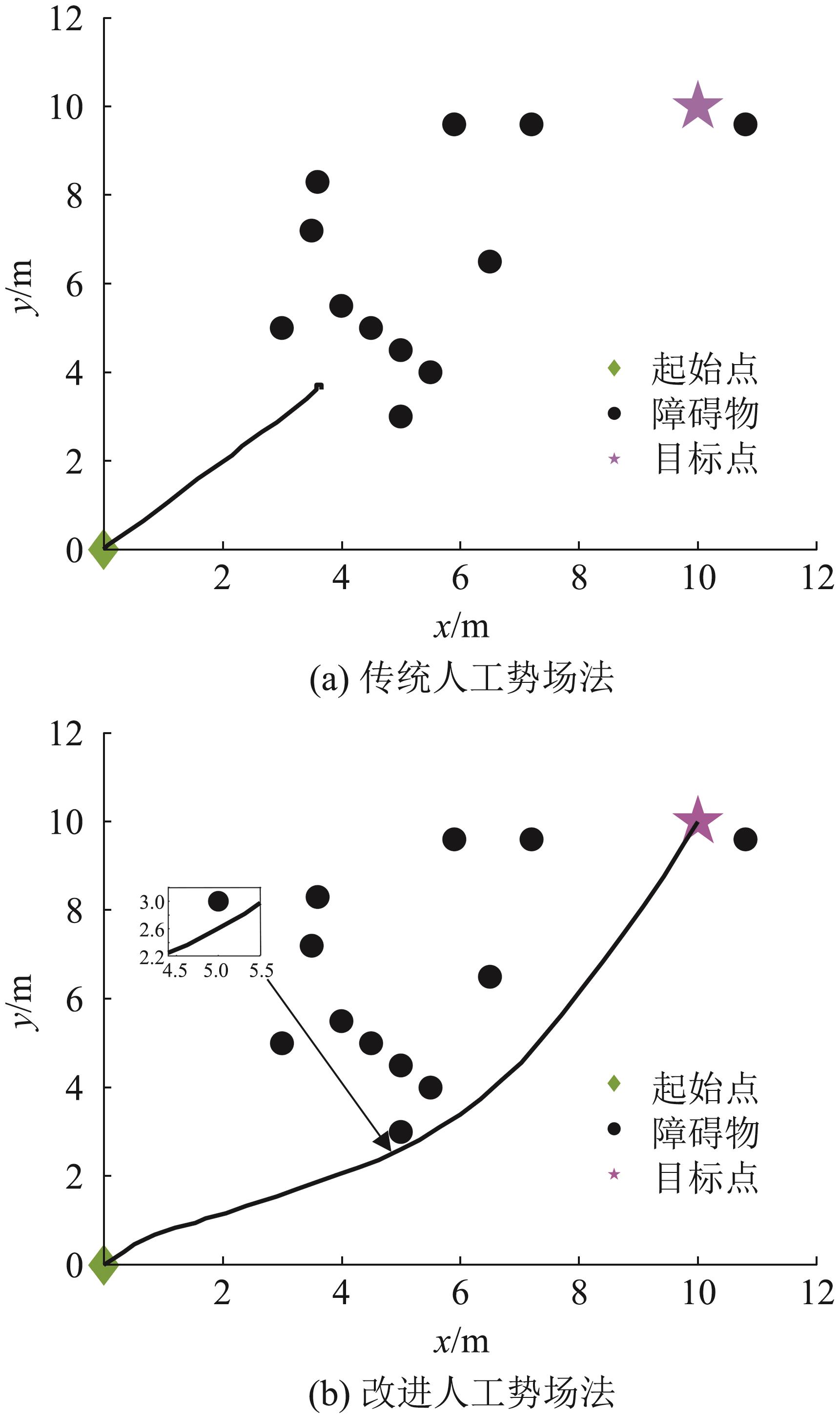
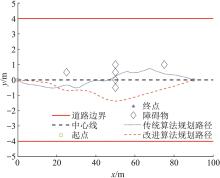
Fig. 7
Comparison of dynamic obstacle avoidance paths
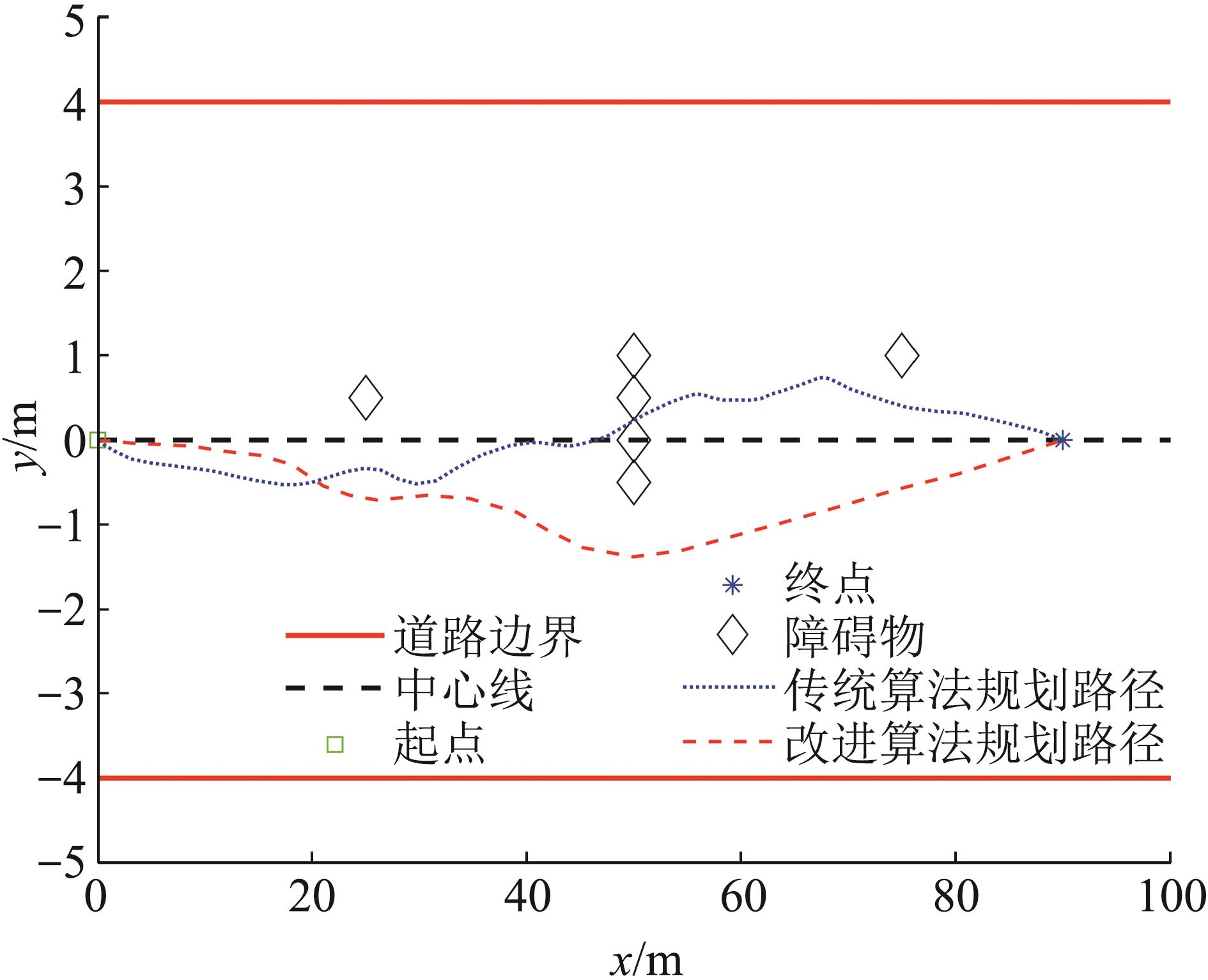
Table 1
Simulation data table under dynamic obstacle conditions
| 参数 | 传统人工势场法 | 改进人工势场法 |
|---|---|---|
| 路径长度/m | 102.49 | 99.37 |
| 迭代次数 | 196 | 174 |
| 运行时间/s | 12.23 | 10.64 |
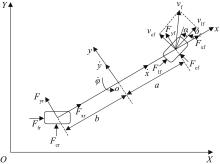
Fig. 8
Vehicle dynamics model
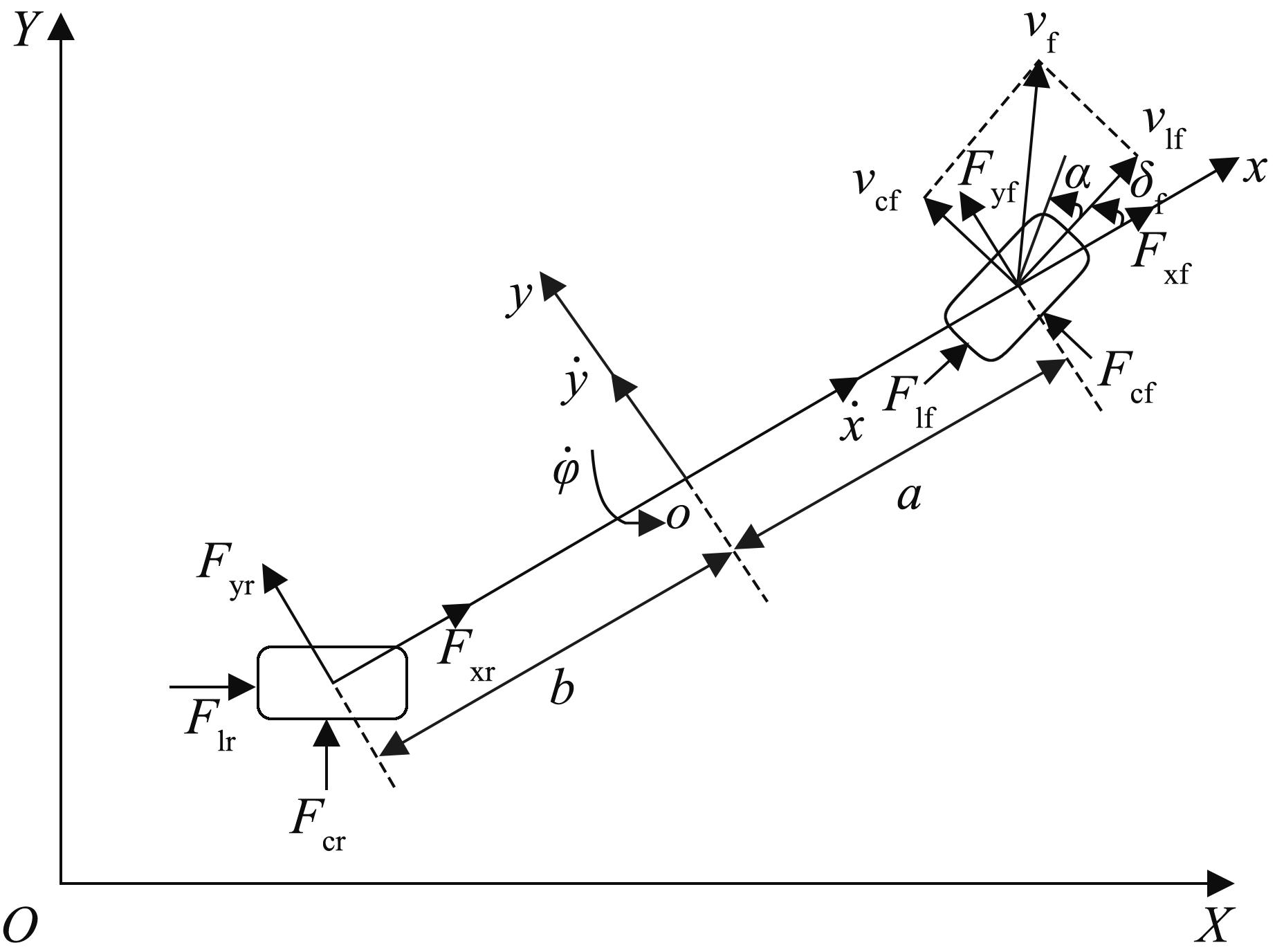

Fig. 9
Tire characteristics diagram
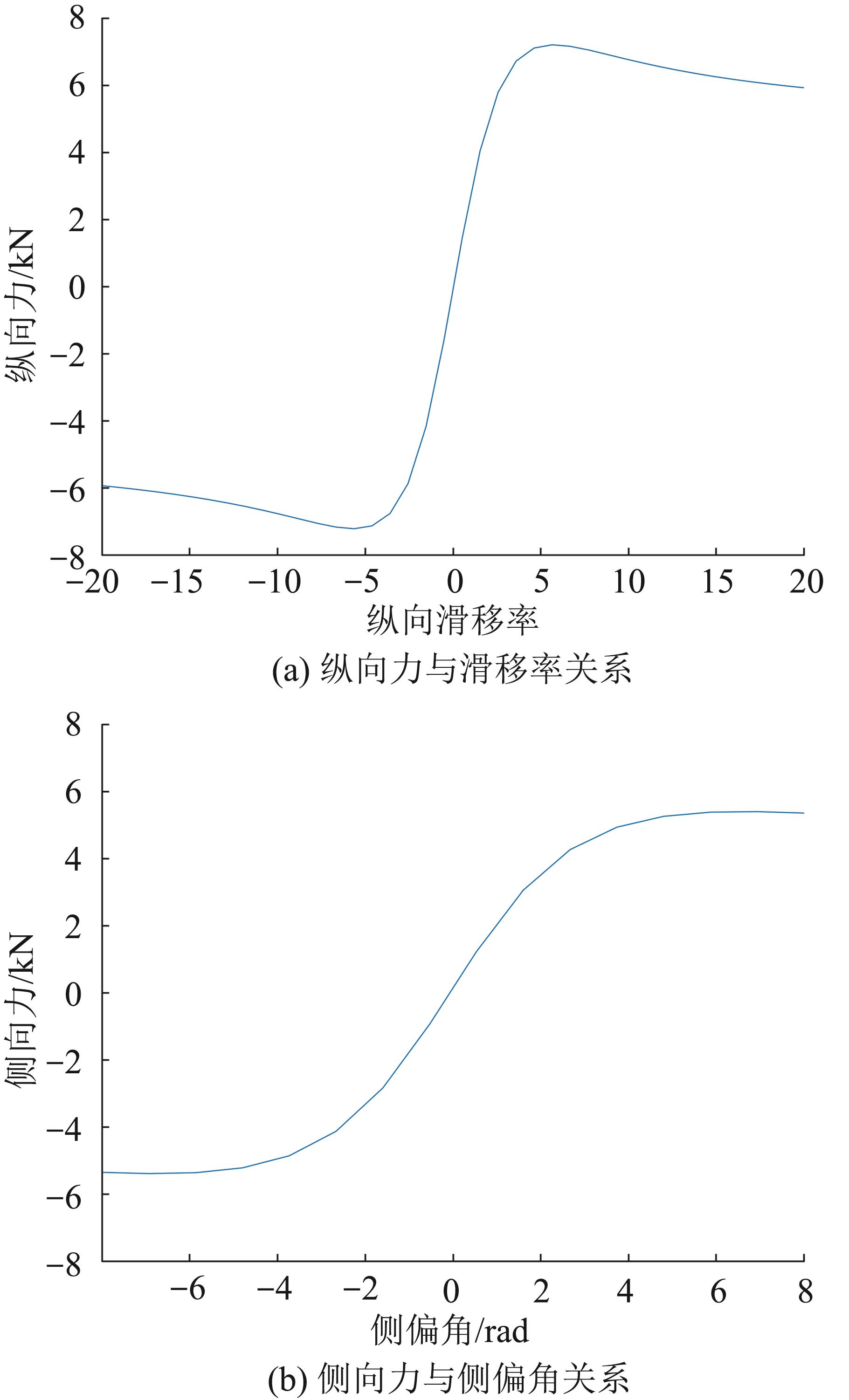

Fig. 10
CarSim, Simulink joint simulation platform
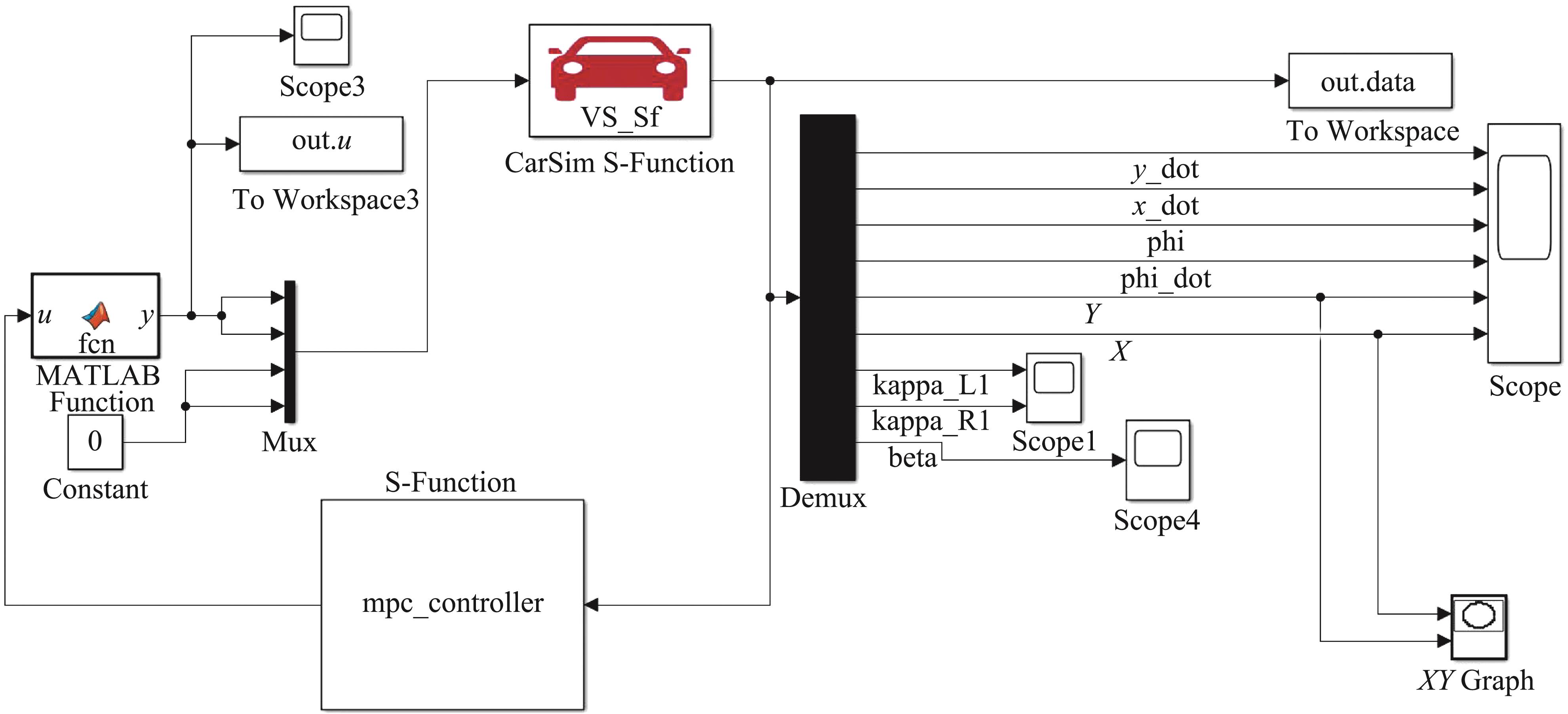

Fig. 11
Simulation of lane change at different vehicle speeds
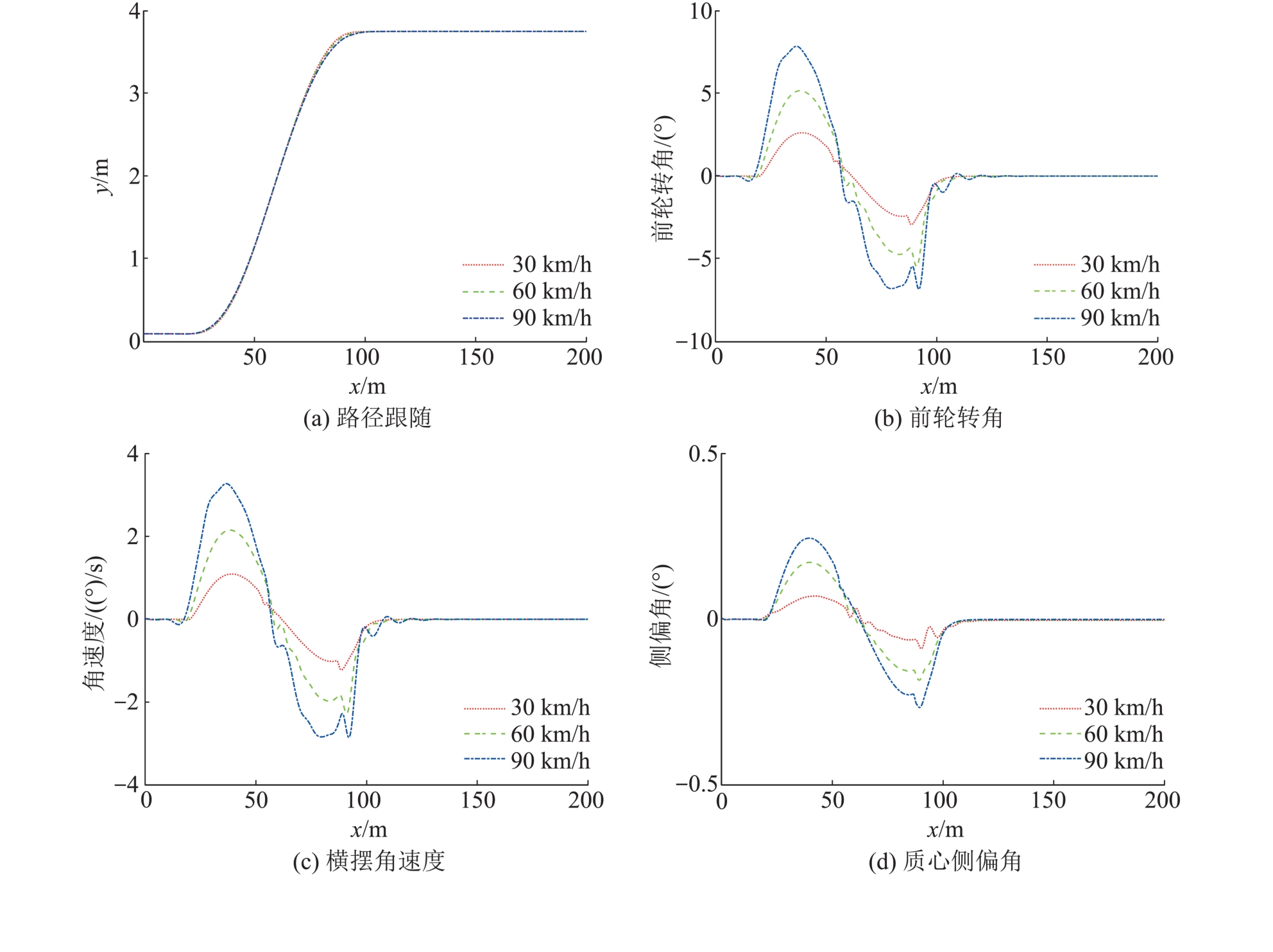
Fig. 12
Simulation results in overtaking scenario
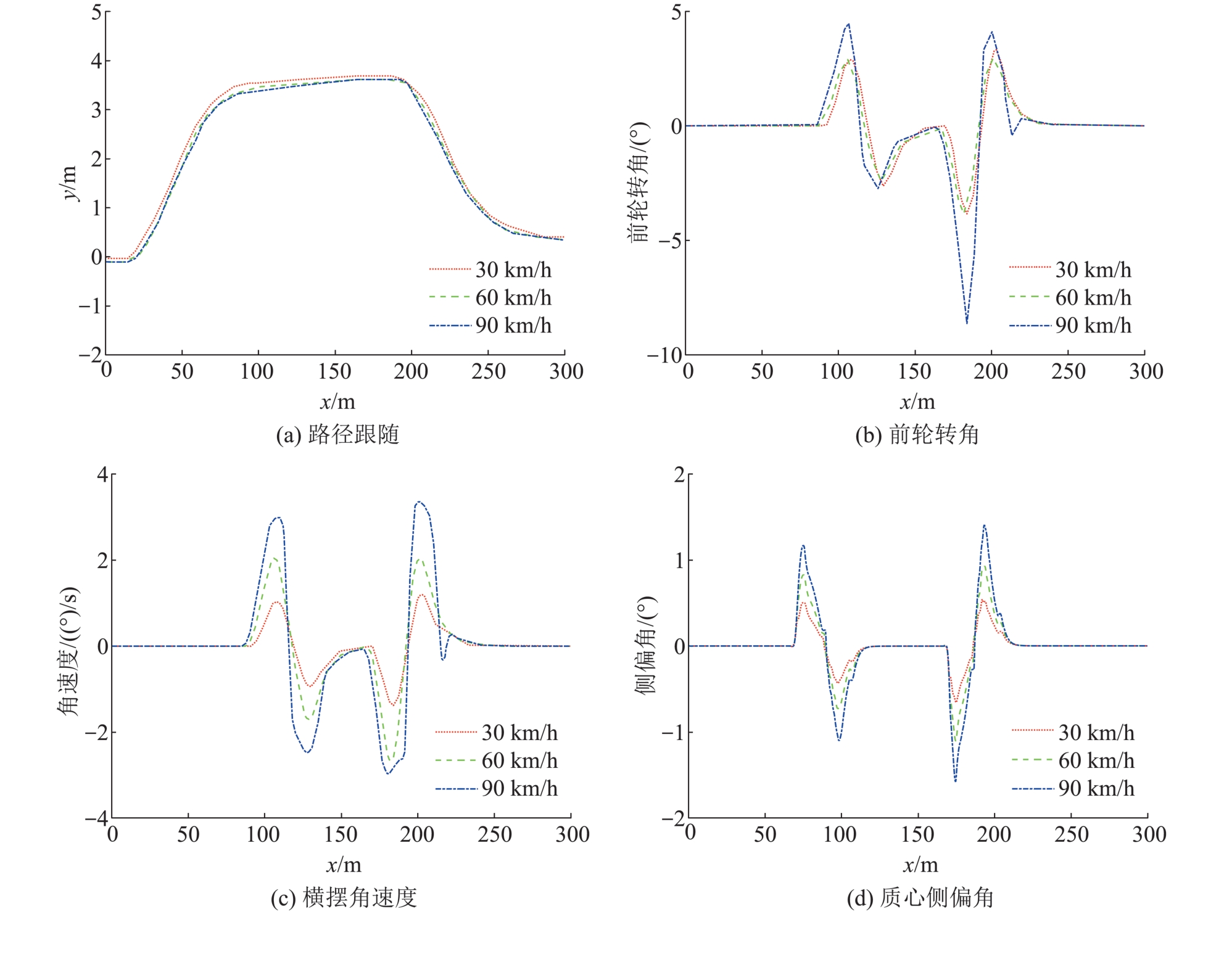
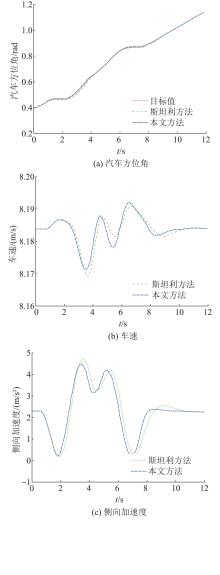
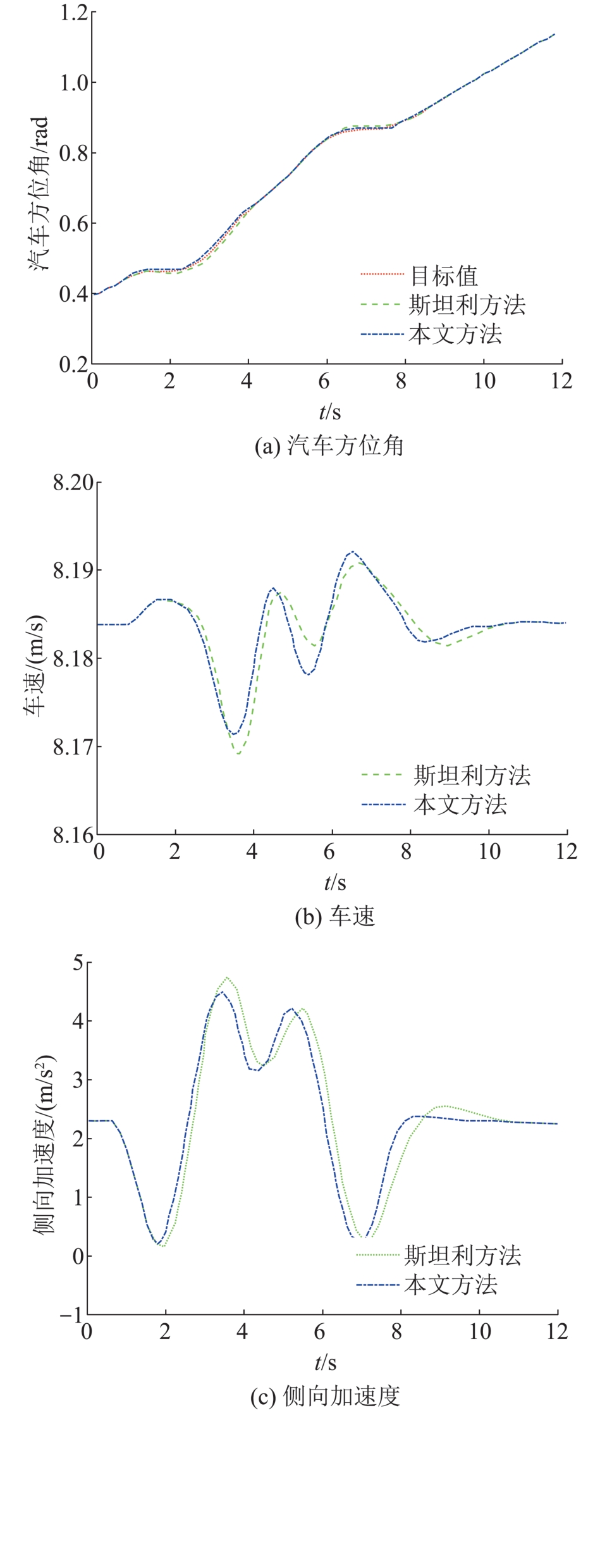
Fig. 13
Tracking control comparison
| 1 | 李骏, 万文星, 郝三强, 等. 复杂路况下无人驾驶路径跟踪模型预测控制研究[J]. 汽车工程, 2022, 44(5): 664-674. |
| Li Jun, Wan Wenxing, Hao Sanqiang, et al. Research on Model Predictive Control of Autonomous Vehicle Path Tracking Under Complex Road Condition[J]. Automotive Engineering, 2022, 44(5): 664-674. | |
| 2 | 牛秦玉, 李博. 基于模拟退火遗传算法的全向AGV路径规划[J/OL]. 计算机集成制造系统. (2022-05-17) [2023-04-16]. . |
| Niu Qinyu, Li Bo. Omnidirectional AGV Path Planning Based on Simulated Annealing Genetic Algorithm[J/OL]. Computer Integrated Manufacturing Systems. (2022-05-17) [2023-04-16]. . | |
| 3 | 辛鹏, 王艳辉, 刘晓立, 等. 优化改进RRT和人工势场法的路径规划算法[J]. 计算机集成制造系统, 2023, 29(9): 2899-2907. |
| Xin Peng, Wang Yanhui, Liu Xiaoli, et al. Path Planning Algorithm Based on Optimize and Improve RRT and Artificial Potential Field[J]. Computer Integrated Manufacturing Systems, 2023, 29(9): 2899-2907. | |
| 4 | 余翔, 姜陈, 段思睿, 等. 改进A*算法和人工势场法的路径规划[J]. 系统仿真学报, 2024, 36(3): 782-794. |
| Yu Xiang, Jiang Chen, Duan Sirui, et al. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method[J]. Journal of System Simulation, 2024, 36(3): 782-794. | |
| 5 | 李二超, 王玉华. 改进人工势场法的移动机器人避障轨迹研究[J]. 计算机工程与应用, 2022, 58(6): 296-304. |
| Li Erchao, Wang Yuhua. Research on Obstacle Avoidance Trajectory of Mobile Robot Based on Improved Artificial Potential Field[J]. Computer Engineering and Applications, 2022, 58(6): 296-304. | |
| 6 | 余政. 基于改进人工势场法的智能汽车超车轨迹规划策略[J]. 农业装备与车辆工程, 2021, 59(9): 64-68. |
| Yu Zheng. Intelligent Vehicle Overtaking Trajectory Planning Strategy Based on Improved Artificial Potential Field Method[J]. Agricultural Equipment & Vehicle Engineering, 2021, 59(9): 64-68. | |
| 7 | 程志, 张志安, 李金芝, 等. 改进人工势场法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(23): 29-34. |
| Cheng Zhi, Zhang Zhian, Li Jinzhi, et al. Mobile Robots Path Planning Based on Improved Artificial Potential Field[J]. Computer Engineering and Applications, 2019, 55(23): 29-34. | |
| 8 | 宋洁, 张小俊, 张云龙. 智能汽车换道避障路径规划与跟踪控制[J]. 现代制造工程, 2022(10): 43-50, 20. |
| Song Jie, Zhang Xiaojun, Zhang Yunlong. Path Planning and Tracking Control for Intelligent Vehicles Changing Lanes to Avoid Obstacles[J]. Modern Manufacturing Engineering, 2022(10): 43-50, 20. | |
| 9 | Wang Ruijie, Yin Guodong, Jin Xianjian. Robust Adaptive Sliding Mode Control for Nonlinear Four-wheel Steering Autonomous Vehicles Path Tracking Systems[C]//2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia). Piscataway: IEEE, 2016: 2999-3006. |
| 10 | 邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| Deng Haipeng, Ma Bin, Zhao Haiguang, et al. Path Planning and Tracking Control of Autonomous Vehicle for Obstacle Avoidance[J]. Acta Armamentarii, 2020, 41(3): 585-594. | |
| 11 | Rasekhipour Y, Khajepour A, Chen S K, et al. A Potential Field-based Model Predictive Path-planning Controller for Autonomous Road Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 1255-1267. |
| 12 | 陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658. |
| Chen Tiande, Huang Yanyan, Shen Wei. Non-oscillation Path Planning Based on Virtual Obstacle Method[J]. Acta Armamentarii, 2019, 40(3): 651-658. | |
| 13 | 朱伟达. 基于改进型人工势场法的车辆避障路径规划研究[D]. 镇江: 江苏大学, 2017. |
| Zhu Weida. Research on Path Planning and Obstacle Avoidance Method for Vehicle Based on Improved Artificial Potential Field[D]. Zhenjiang: Jiangsu University, 2017. | |
| 14 | 肖婷. 智能车在复杂环境下的路径规划与跟随控制算法研究[D]. 长春: 吉林大学, 2019. |
| Xiao Ting. Research on the Path Planning and the Tracking Control Algorithm of the Intelligent Vehicle in Complex Environment[D]. Changchun: Jilin University, 2019. | |
| 15 | 安林芳. 智能车辆自动驾驶路径规划研究[D]. 长沙: 湖南大学, 2017. |
| An Linfang. Research on the Path Planning for Automatic Driving of Intelligent Vehicle[D]. Changsha: Hunan University, 2017. | |
| 16 | Pacejka H B, Bert C W. Tyre Models for Vehicle Dynamics Analysis[J]. Journal of Applied Mechanics, 1995, 62(1): 268. |
| 17 | 余志生. 汽车理论[M]. 6版. 北京: 机械工业出版社, 2019. |
| Yu Zhisheng. Automobile Theory[M]. 6th ed. Beijing: China Machine Press, 2019. | |
| 18 | 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6): 174-182. |
| Tang Zhirong, Ji Jie, Wu Mingyang, et al. Vehicles Path Planning and Tracking Based on an Improved Artificial Potential Field Method[J]. Journal of Southwest University(Natural Science Edition), 2018, 40(6): 174-182. | |
| 19 | Guo Lie, Ge Pingshu, Sun Dachuan, et al. Adaptive Cruise Control Based on Model Predictive Control with Constraints Softening[J]. Applied Sciences, 2020, 10(5): 1635. |
| 20 | Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: The Robot that Won the DARPA Grand Challenge[J]. Journal of Robotic Systems, 2006, 23(9): 661-692. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Ma Miaomiao, Long Zijuan, Ren Zhiwei, Cheng Yongqiang. Hierarchical Optimal Scheduling of Integrated Energy System with Electric Vehicles Based on EMPC [J]. Journal of System Simulation, 2025, 37(5): 1116-1128. |
| [15] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
