

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (4): 1008-1024.doi: 10.16182/j.issn1004731x.joss.23-1552
• Papers • Previous Articles Next Articles
Zhang Xingyu1, Wu Baolei2, Wang Jun3, Hong Miaoying1, Wang Jiahui3, Qi Yongqiang1
Received:2023-12-20
Revised:2024-01-20
Online:2025-04-17
Published:2025-04-16
Contact:
Qi Yongqiang
CLC Number:
Zhang Xingyu, Wu Baolei, Wang Jun, Hong Miaoying, Wang Jiahui, Qi Yongqiang. Research on Dual-layer Path Planning Method for Lunar Rover Based on Slip Prediction[J]. Journal of System Simulation, 2025, 37(4): 1008-1024.
Fig. 1
Predicted trajectory
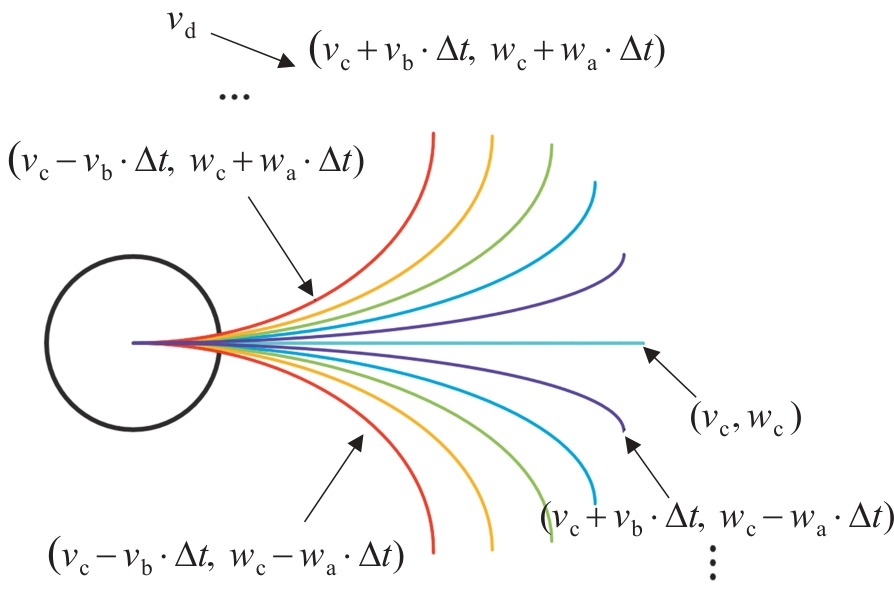
Fig. 2
Analysis window
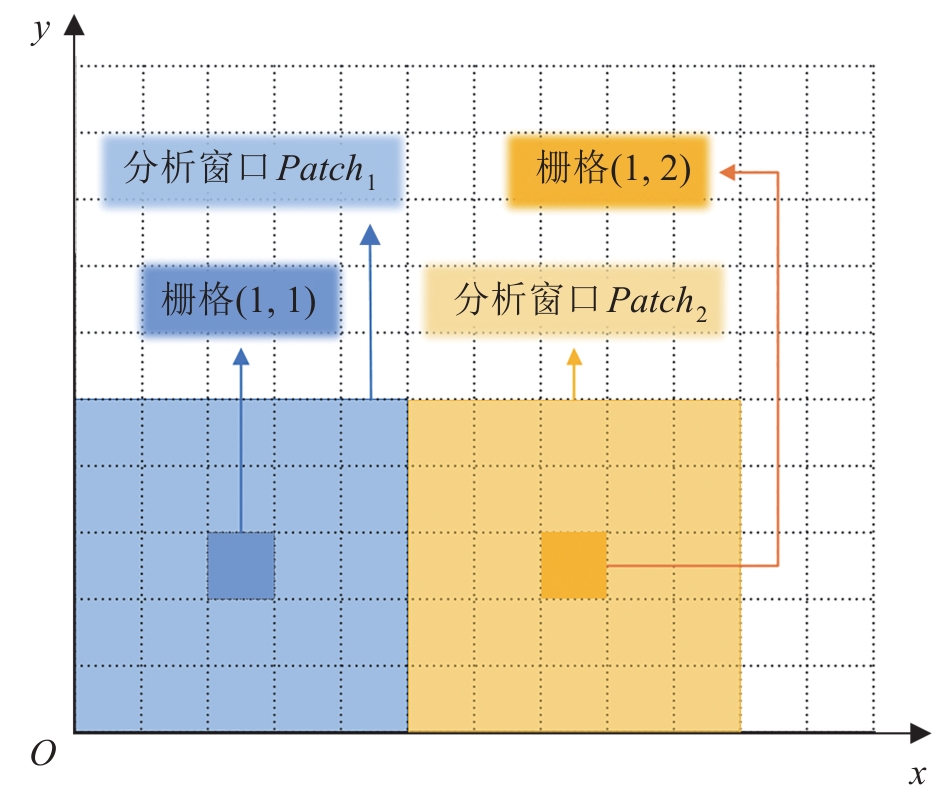
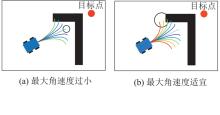
Fig. 3
Maximum angular velocity analysis
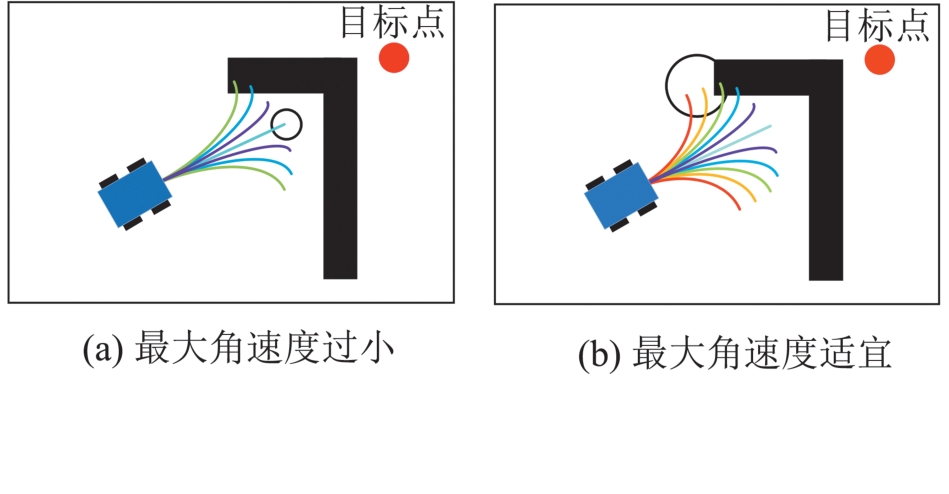

Fig. 4
Adaptive prediction time analysis
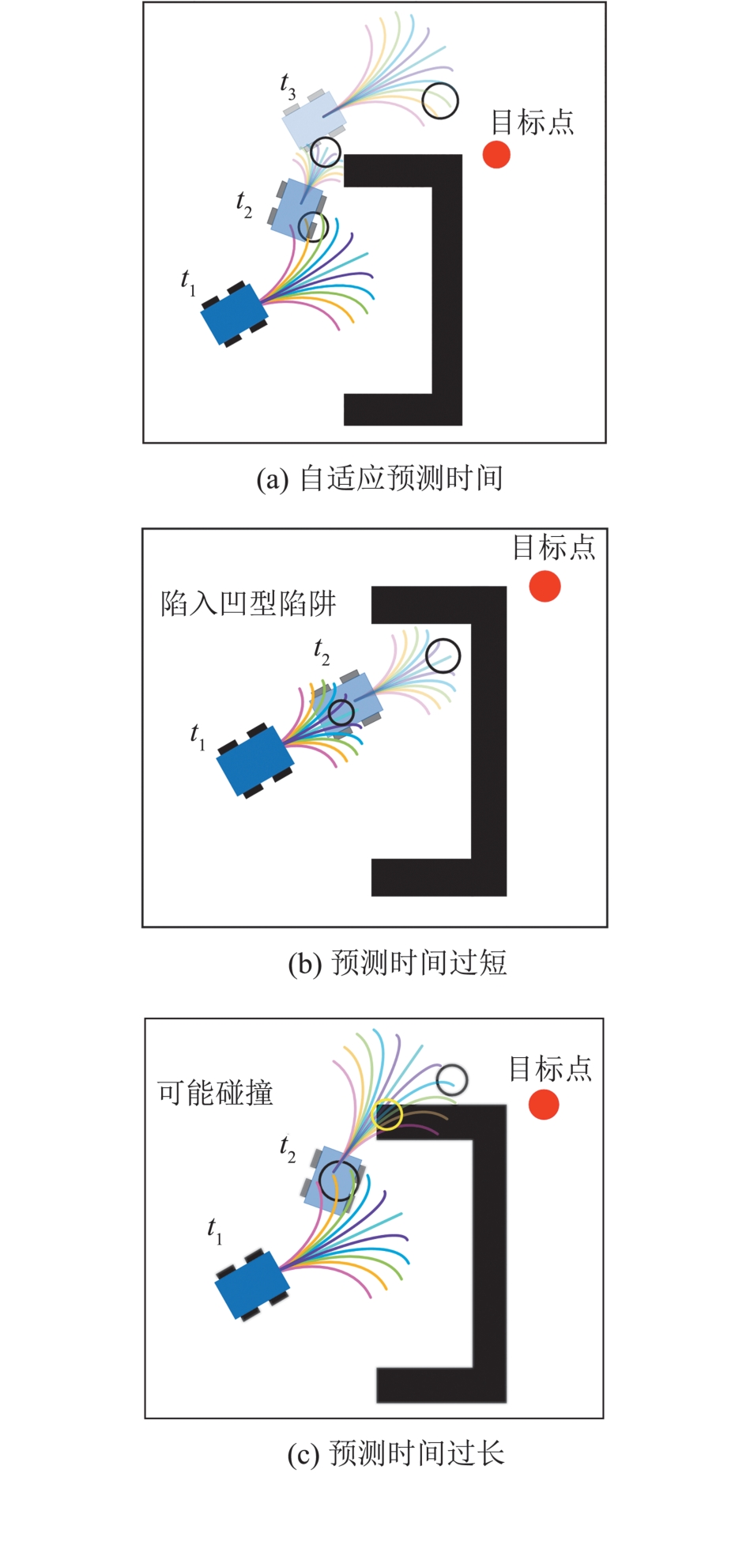
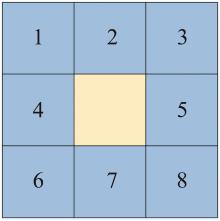
Fig. 5
Eight directions
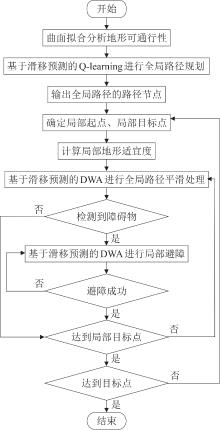
Fig. 6
Flowchart of dual-layer path planning based on slip prediction
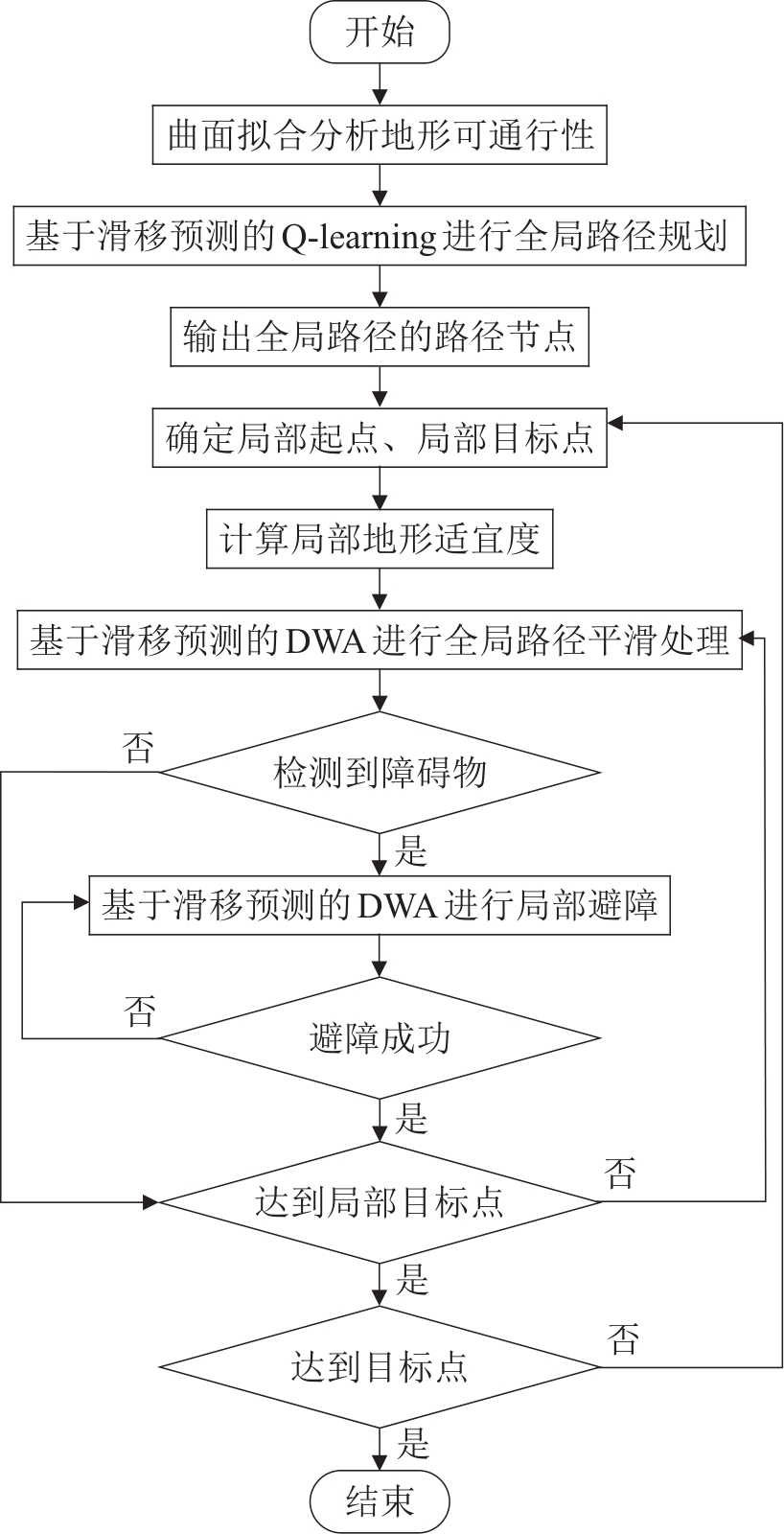
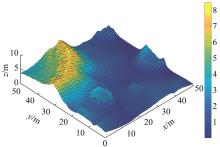
Fig. 7
Three-dimensional terrain model of lunar surface
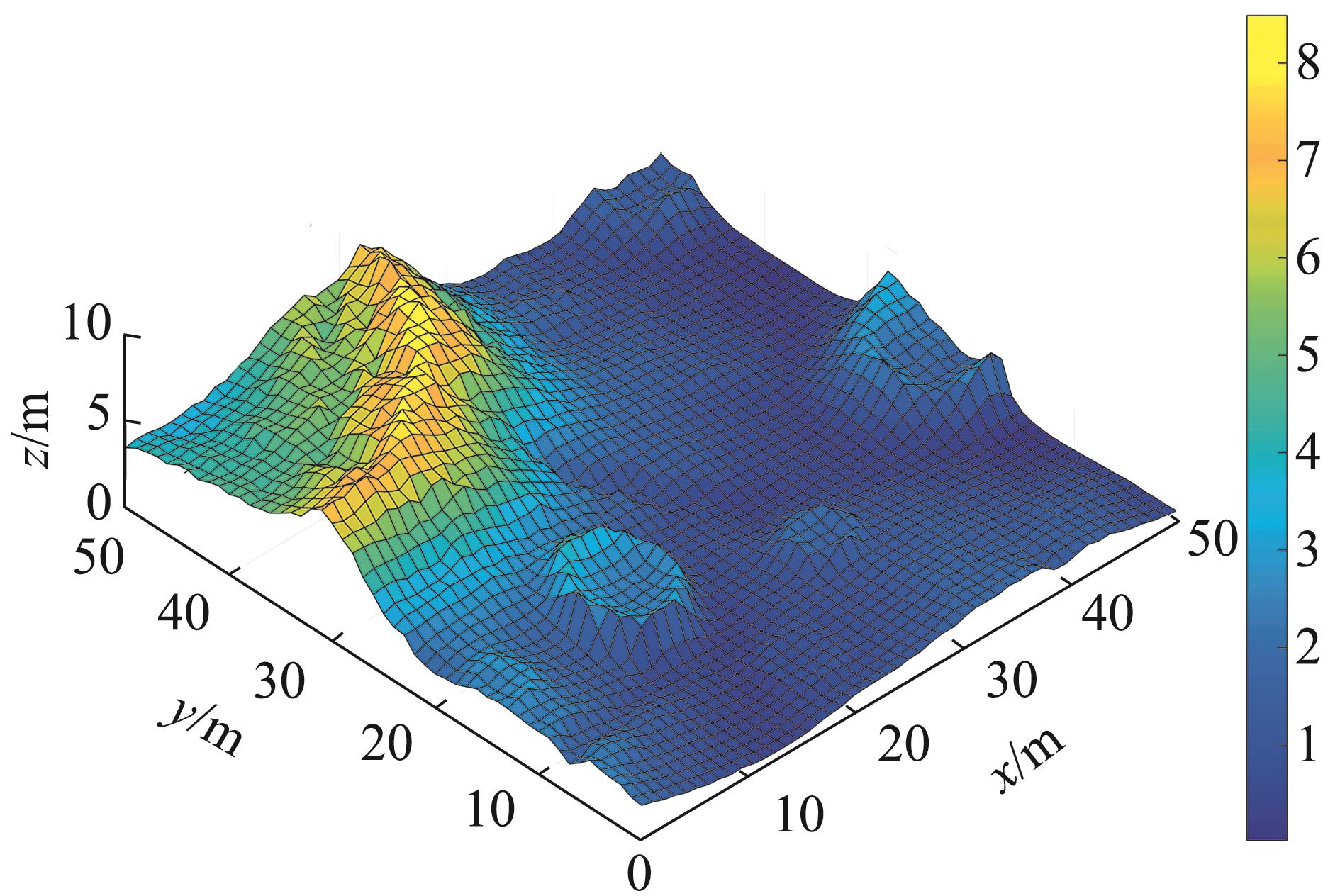
Fig. 8
Distribution map of comprehensive terrain complexity
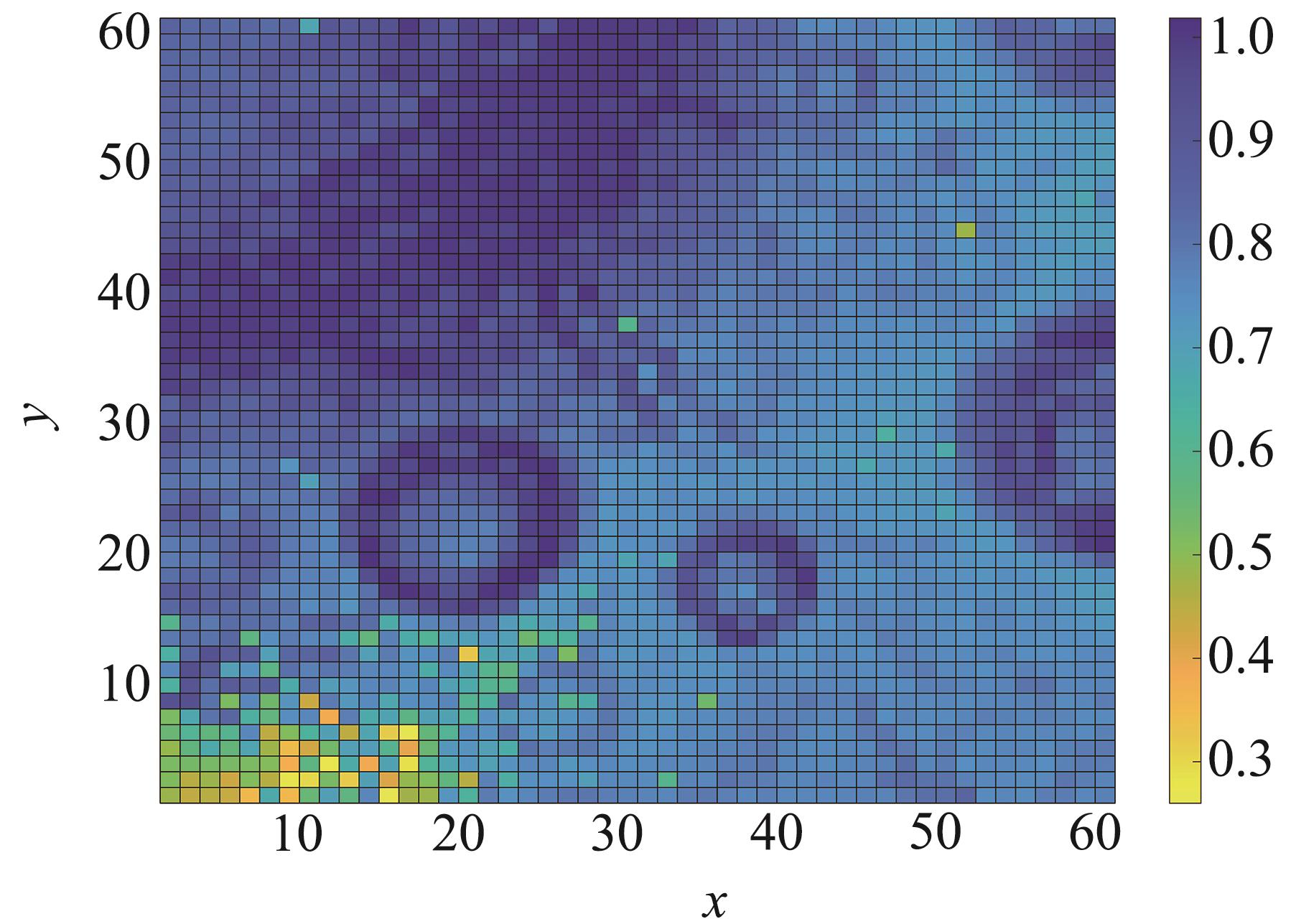
Table 1
Parameters for terrain accessibility analysis
| 主要参数 | 量值 |
|---|---|
| 最大安全坡度角/(°) | 30 |
| 最大越障高度/m | 1 |
| 0.4 | |
| 0.3 | |
| 0.3 |
Table 2
Global path planning parameters
| 主要参数 | 量值 |
|---|---|
| 学习率 | 0.2 |
| 折扣因子 | 0.99 |
| 贪婪系数 | 0.9 |
| 最大训练次数 | 2 000 |
| 每次训练的最大步数 | 3 721 |
| 禁区距离阈值 | 10 |
| -1 000 | |
| 1 000 | |
| -1 |
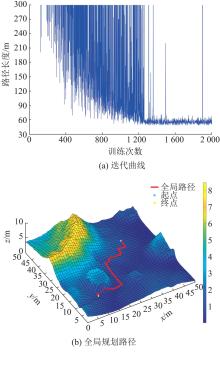
Fig. 9
Traditional Q-learning algorithm
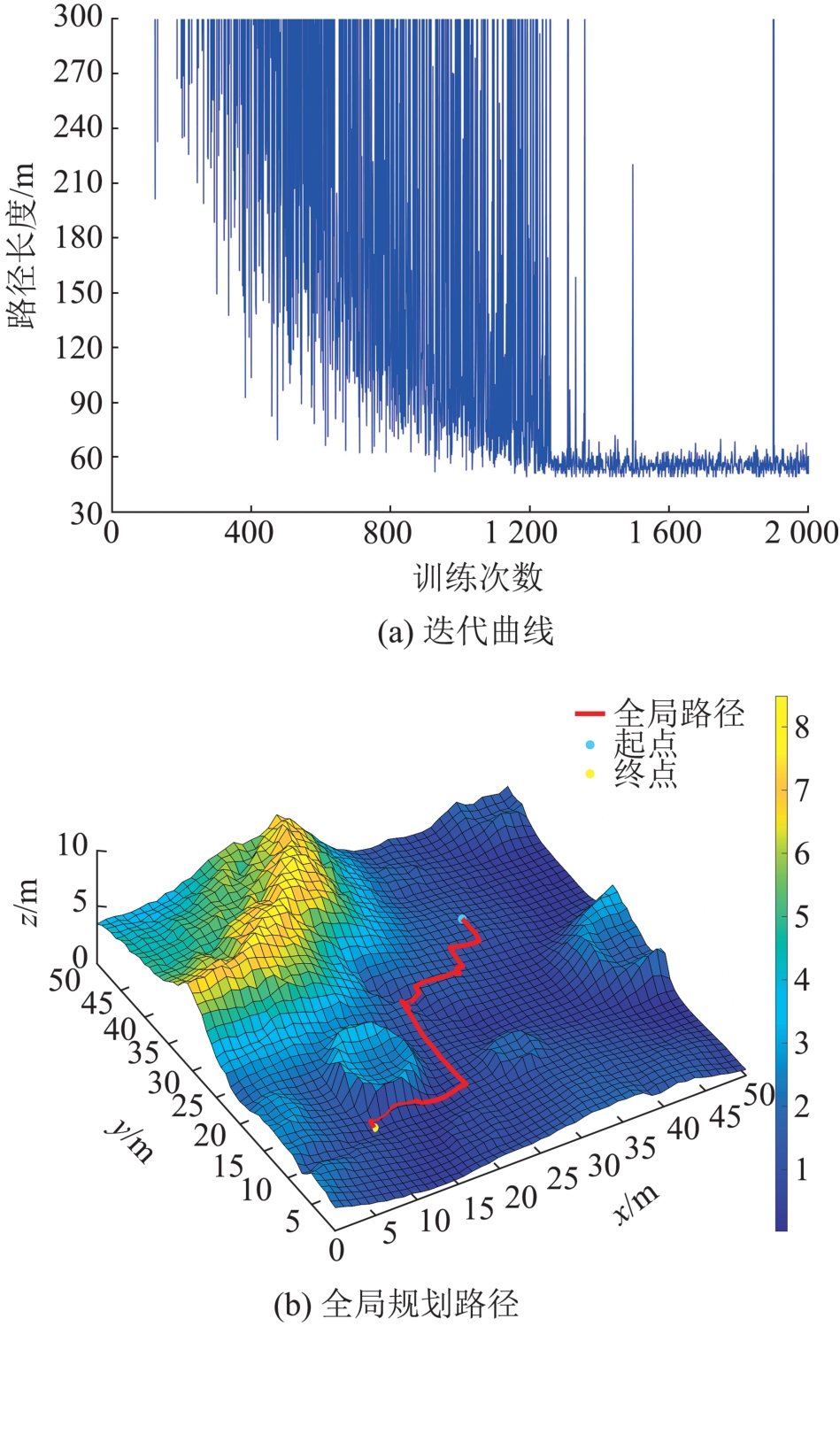
Fig. 10
Improved Q-learning algorithm without backtracking mechanism
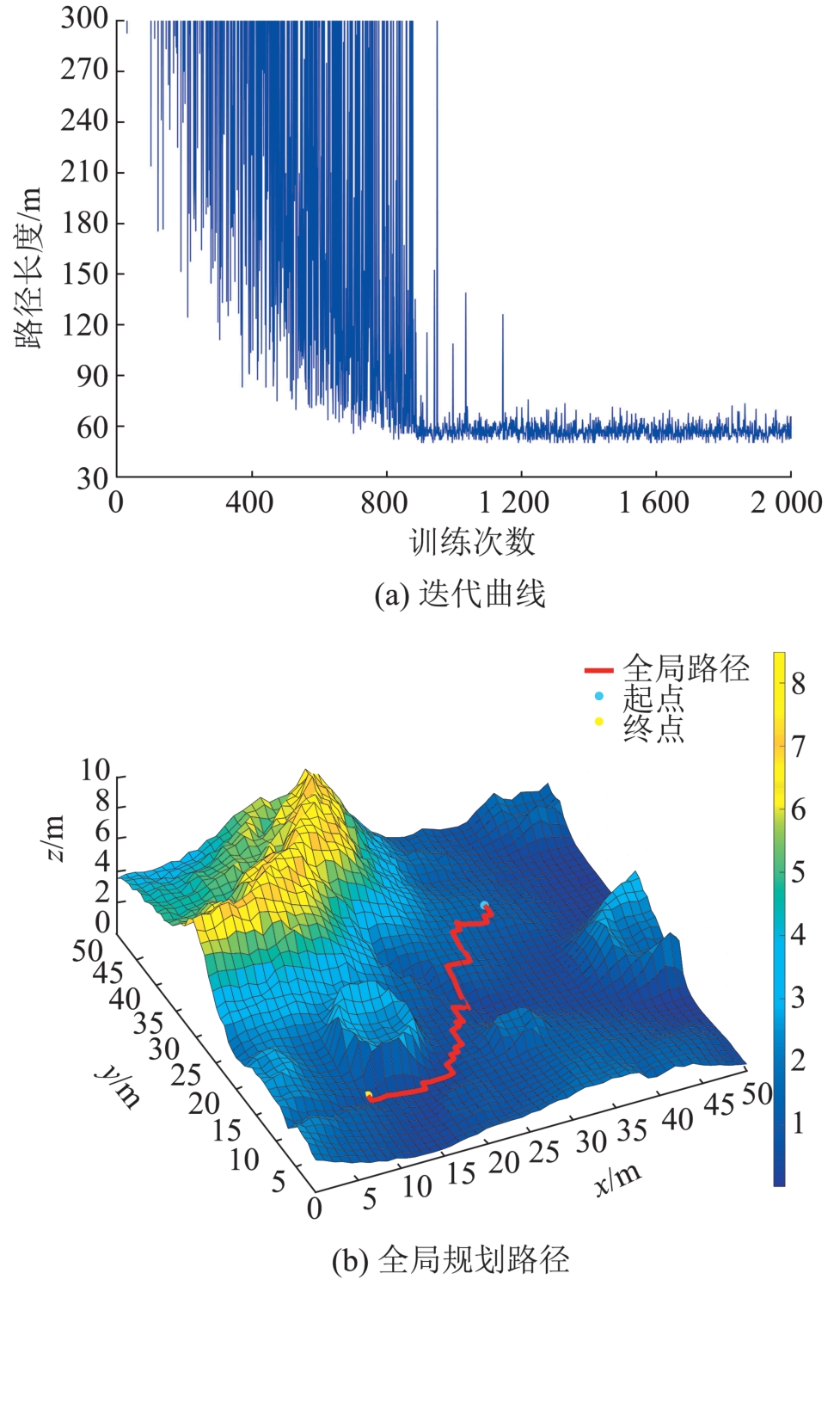
Fig. 11
Improved Q-learning algorithm with backtracking mechanism
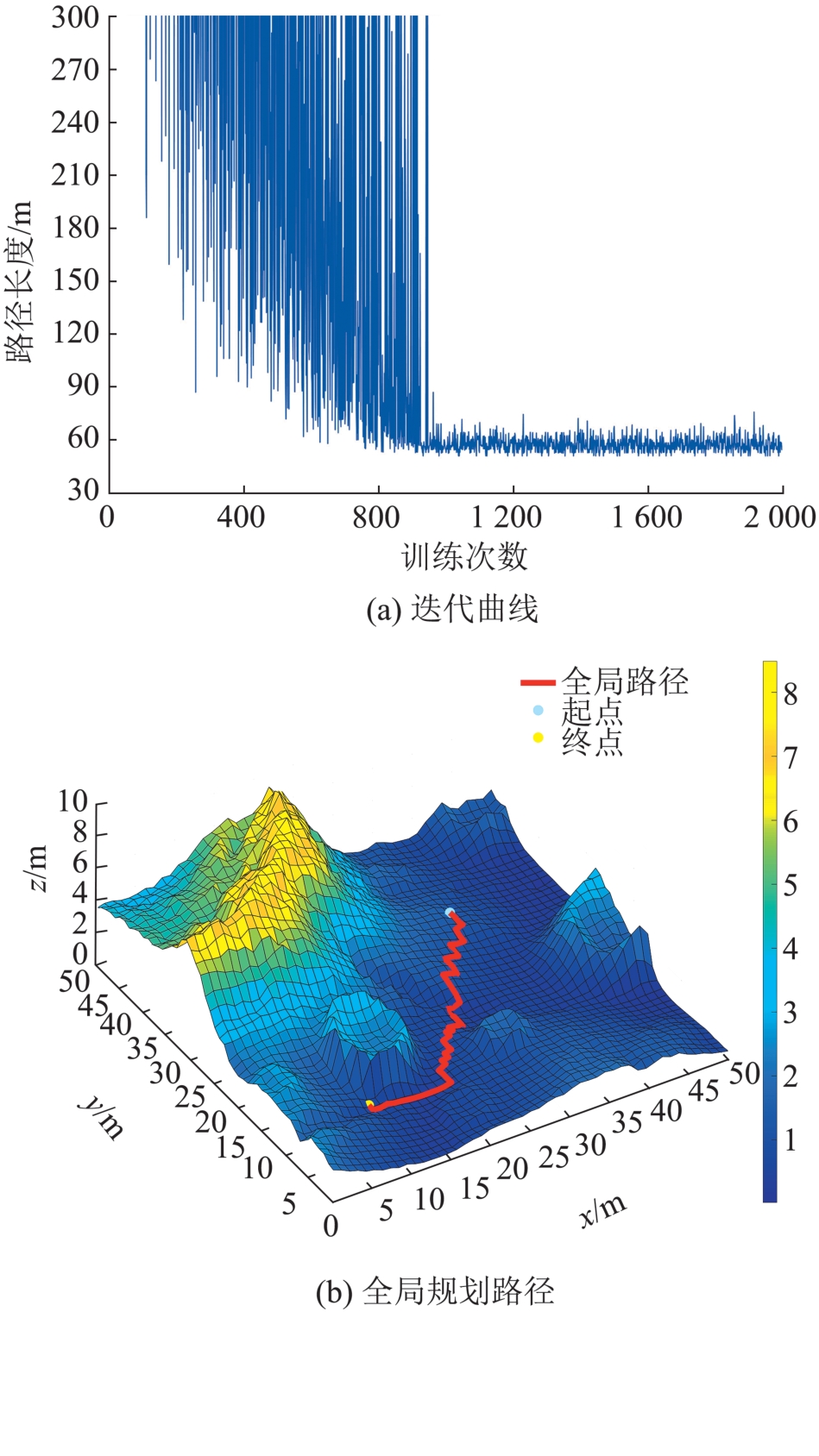
Table 3
Comparison of global path planning metrics
| 指标 | 传统Q-learning算法 | Q-learning+ 三级奖励机制 | Q-learning+三级奖励机制+退回机制 |
|---|---|---|---|
| 路径安全性 | 0.14 | 0.25 | 0.21 |
| 路径长度/m | 48.421 8 | 47.960 7 | 47.991 4 |
| 运行时间/s | 125.33 | 1 969.40 | 1 843.20 |
Fig. 12
Comparative experiment Ⅰ
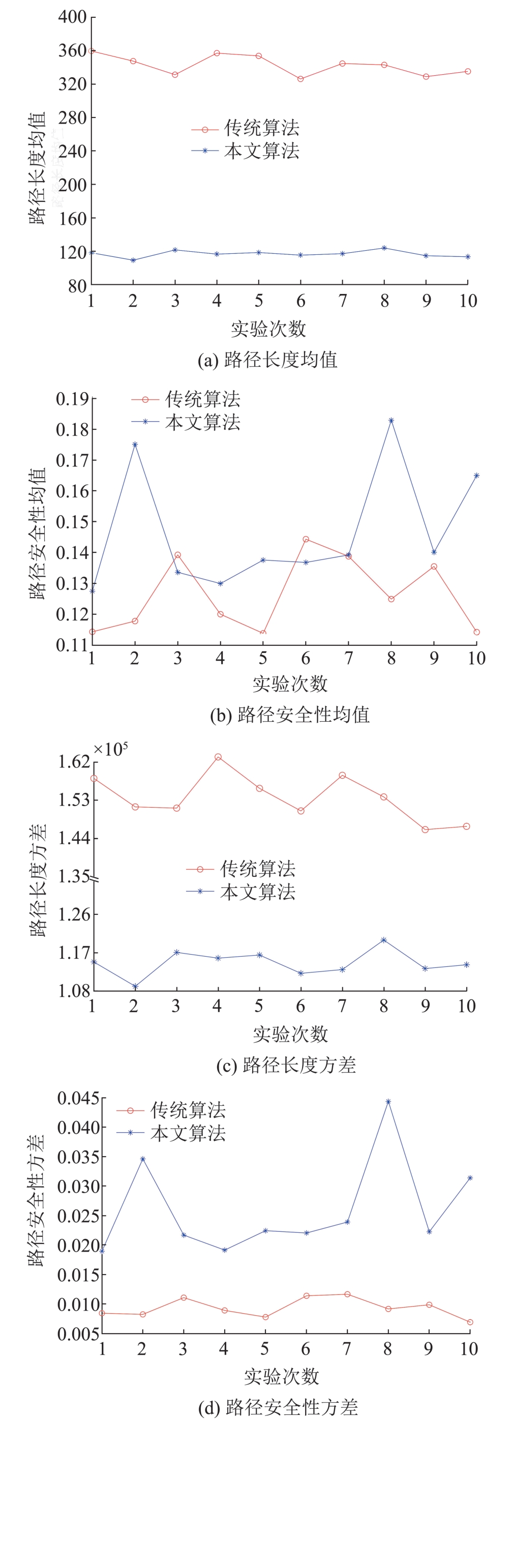
Table 4
Local path planning parameters
| 主要参数 | 量值 | 主要参数 | 量值 |
|---|---|---|---|
| 100 | 0.005 | ||
| 0.3 | 0.4 | ||
| 0.3 | 0.25 | ||
| 3.5 | 0.1 | ||
| 10 | 0.003 |
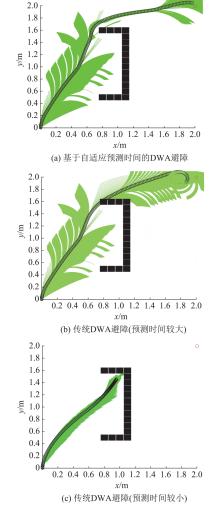
Fig. 13
Comparative experiment Ⅱ
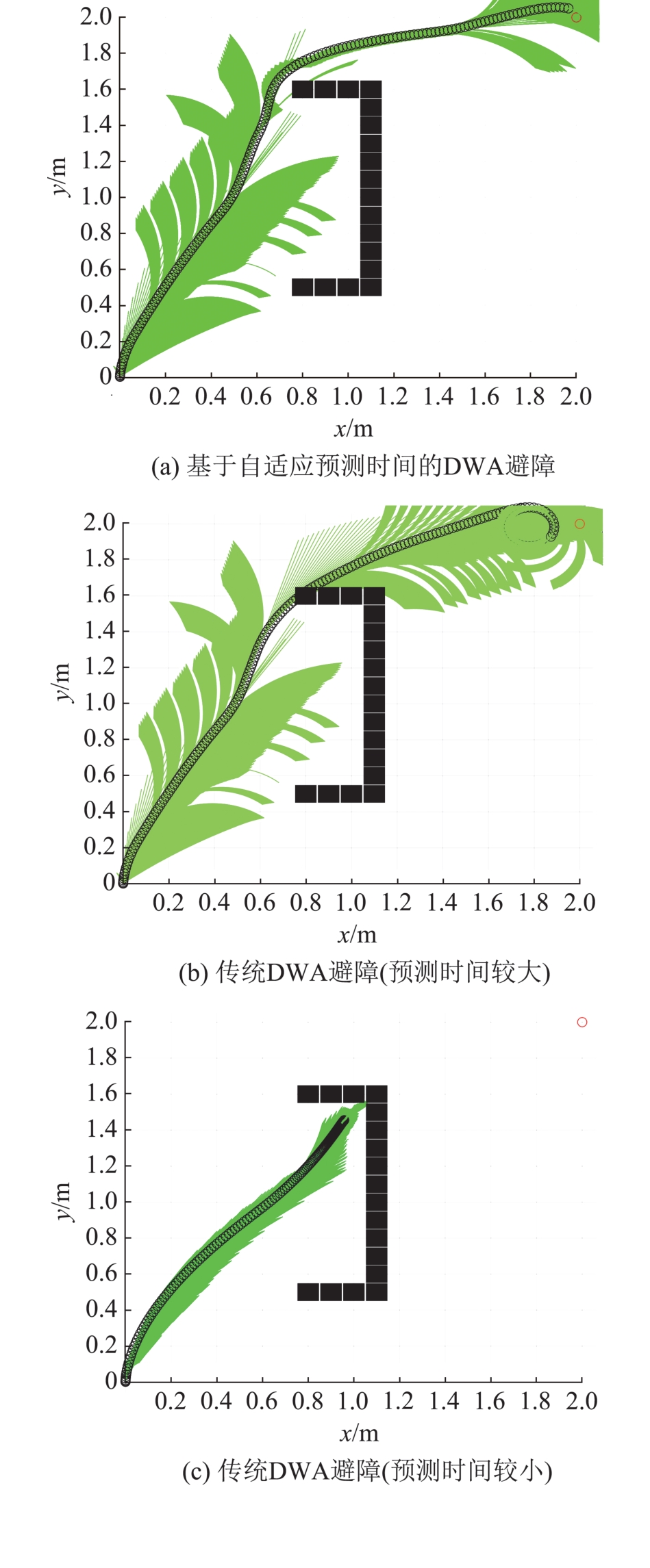
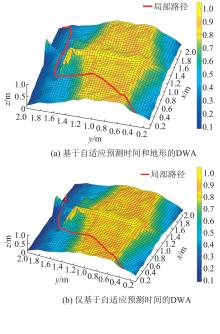
Fig. 14
Comparative experiment Ⅲ
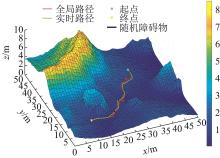
Fig. 15
Dual-layer path planning based on slip prediction
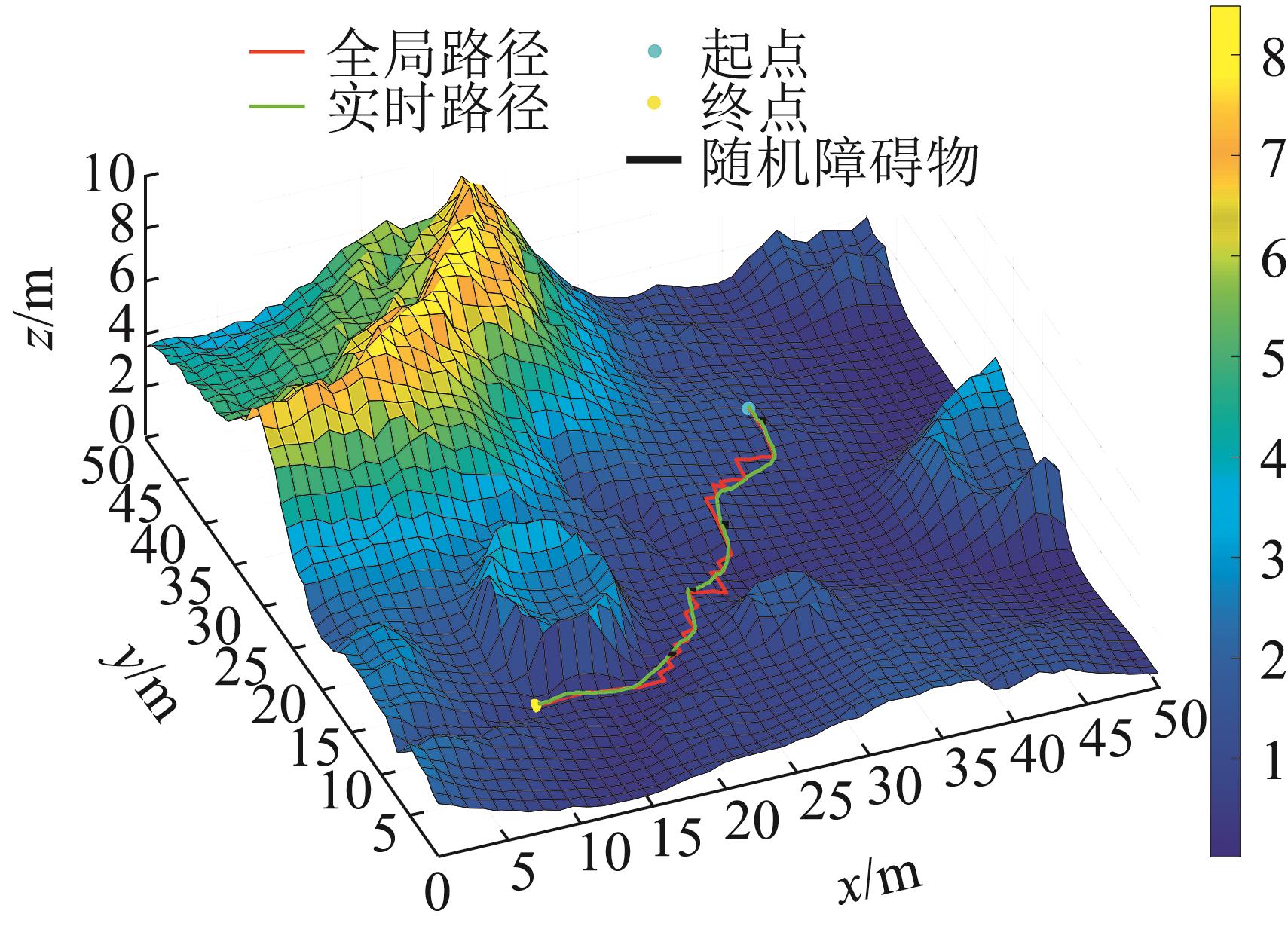
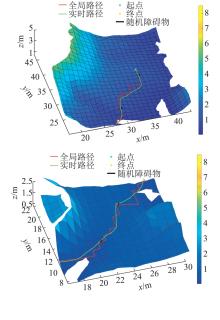
Fig. 16
Local map for dual-layer path planning
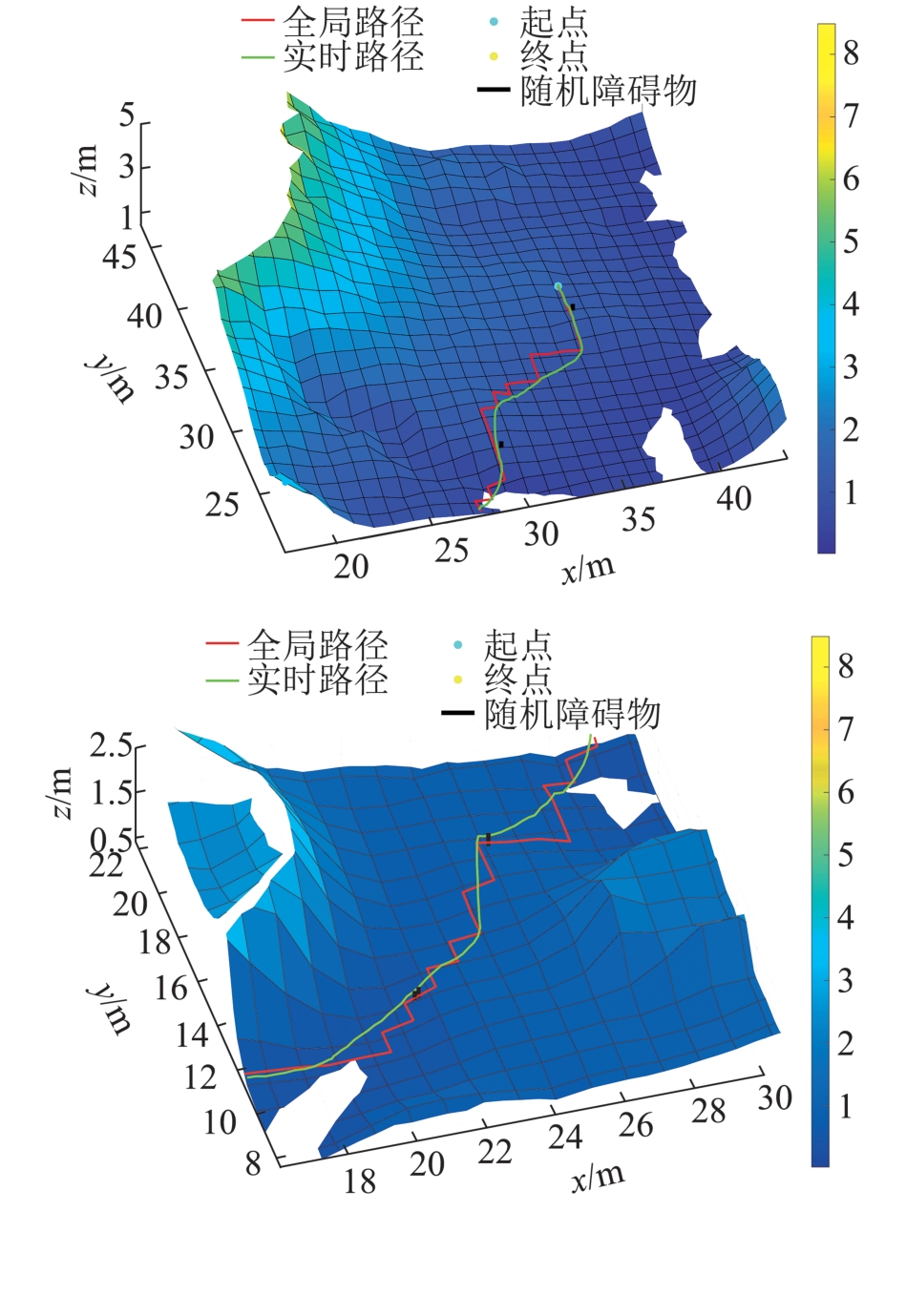
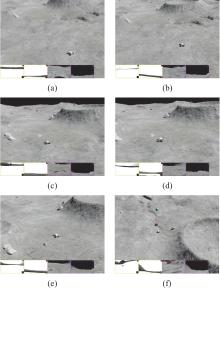
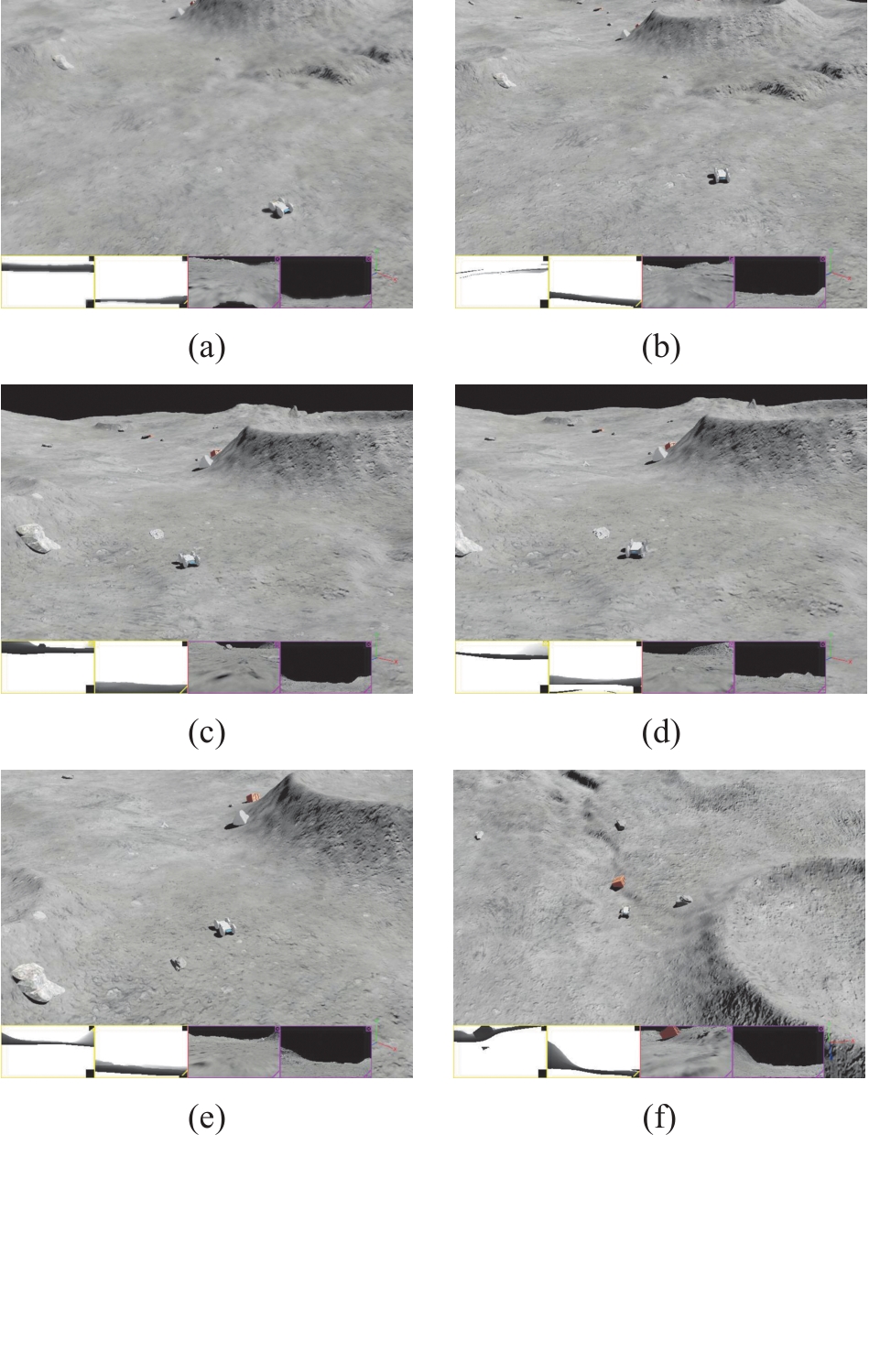
Fig. 17
Virtual environment testing experiment
| 1 | 李晓婉, 成芳, 赵航, 等. 月球导航的卫星可见性及信号强度分析[J]. 测绘科学, 2022, 47(7): 14-20. |
| Li Xiaowan, Cheng Fang, Zhao Hang, et al. Analysis on Visibility and Signal Strength of Satellite for Lunar Navigation[J]. Science of Surveying and Mapping, 2022, 47(7): 14-20. | |
| 2 | 张天翼. 面向在轨应用的火星车滑移行为研究[D]. 长春: 吉林大学, 2022. |
| Zhang Tianyi. Research on Slip Behavior of Mars Rover for On-orbit Application[D]. Changchun: Jilin University, 2022. | |
| 3 | 马浩. 基于视觉的月球/火星车滑移率预测研究[D]. 北京: 中国科学院大学(中国科学院遥感与数字地球研究所), 2019. |
| Ma Hao. Vision Based Lunar/Mars Rover Slip Prediction Research[D]. Beijing: University of Chinese Academy of Sciences(Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences), 2019. | |
| 4 | 邢琰, 刘祥, 滕宝毅, 等. 月球表面巡视探测自主局部避障规划[J]. 控制理论与应用, 2019, 36(12): 2042-2046. |
| Xing Yan, Liu Xiang, Teng Baoyi, et al. Autonomous Local Obstacle Avoidance Path Planning of Lunar Surface Exploration Rovers[J]. Control Theory & Applications, 2019, 36(12): 2042-2046. | |
| 5 | 周兰凤, 杨丽娜, 方华. 基于滑移预测的月球车路径规划研究[J]. 计算机应用与软件, 2019, 36(11): 47-50. |
| Zhou Lanfeng, Yang Lina, Fang Hua. Lunar Rover Path Planning Based on Slip Prediction[J]. Computer Applications and Software, 2019, 36(11): 47-50. | |
| 6 | 成毅. 基于DEM的三维地形建模及集输管道路径优化研究[D]. 大庆: 东北石油大学, 2019. |
| Cheng Yi. Research on 3D Terrain Modeling Based on DEM and Path Optimization of Gathering Pipeline[D]. Daqing: Northeast Petroleum University, 2019. | |
| 7 | Hu Jiaming, Hu Yuhui, Lu Chao, et al. Integrated Path Planning for Unmanned Differential Steering Vehicles in Off-road Environment with 3D Terrains and Obstacles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5562-5572. |
| 8 | Zhang Wei, Wang Naixin, Wu Wenhua. A Hybrid Path Planning Algorithm Considering AUV Dynamic Constraints Based on Improved A* Algorithm and APF Algorithm[J]. Ocean Engineering, 2023, 285, Part 1: 115333. |
| 9 | Liu Chao, Wu Lei, Xiao Wensheng, et al. An Improved Heuristic Mechanism Ant Colony Optimization Algorithm for Solving Path Planning[J]. Knowledge-Based Systems, 2023, 271: 110540. |
| 10 | Yang Hui, Qi Jie, Miao Yongchun, et al. A New Robot Navigation Algorithm Based on a Double-layer Ant Algorithm and Trajectory Optimization[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8557-8566. |
| 11 | Ning Xuefeng, Li Yuanjia, Liu Zehuai. Improved Genetic Algorithm-based Obstacle Avoidance Path Planning Method for Inspection Robots[C]//2023 2nd International Symposium on Control Engineering and Robotics (ISCER). Piscataway: IEEE, 2023: 346-350. |
| 12 | Qi Jie, Yang Hui, Sun Haixin. MOD-RRT*: A Sampling-based Algorithm for Robot Path Planning in Dynamic Environment[J]. IEEE Transactions on Industrial Electronics, 2021, 68(8): 7244-7251. |
| 13 | Chi Wenzheng, Ding Zhiyu, Wang Jiankun, et al. A Generalized Voronoi Diagram-based Efficient Heuristic Path Planning Method for RRTs in Mobile Robots[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4926-4937. |
| 14 | Ee Soong Low, Ong Pauline, Cheng Yee Low, et al. Modified Q-learning with Distance Metric and Virtual Target on Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2022, 199: 117191. |
| 15 | Ee Soong Low, Ong Pauline, Cheng Yee Low. A Modified Q-learning Path Planning Approach Using Distortion Concept and Optimization in Dynamic Environment for Autonomous Mobile Robot[J]. Computers & Industrial Engineering, 2023, 181: 109338. |
| 16 | Kobayashi Masato, Zushi Hiroka, Nakamura Tomoaki, et al. Local Path Planning: Dynamic Window Approach with Q-learning Considering Congestion Environments for Mobile Robot[J]. IEEE Access, 2023, 11: 96733-96742. |
| 17 | Hun Lee Dhong, Sang Su Lee, Choon Ki Ahn, et al. Finite Distribution Estimation-based Dynamic Window Approach to Reliable Obstacle Avoidance of Mobile Robot[J]. IEEE Transactions on Industrial Electronics, 2021, 68(10): 9998-10006. |
| 18 | 王旭扬, 梁志伟, 高翔, 等. 基于改进DWA算法的足球机器人局部轨迹规划[J]. 国外电子测量技术, 2023, 42(8): 1-9. |
| Wang Xuyang, Liang Zhiwei, Gao Xiang, et al. Local Trajectory Planning of Soccer Robot Based on Improved DWA Algorithm[J]. Foreign Electronic Measurement Technology, 2023, 42(8): 1-9. | |
| 19 | 杨海兰, 祁永强, 吴保磊, 等. 动态环境下基于忆阻强化学习的移动机器人路径规划[J]. 系统仿真学报, 2023, 35(7): 1619-1633. |
| Yang Hailan, Qi Yongqiang, Wu Baolei, et al. Path Planning of Mobile Robots Based on Memristor Reinforcement Learning in Dynamic Environment[J]. Journal of System Simulation, 2023, 35(7): 1619-1633. | |
| 20 | Pei Muleilan, An Hao, Liu Bo, et al. An Improved Dyna-Q Algorithm for Mobile Robot Path Planning in Unknown Dynamic Environment[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(7): 4415-4425. |
| 21 | 黄昱洲, 王立松, 秦小麟. 一种基于深度强化学习的无人小车双层路径规划方法[J]. 计算机科学, 2023, 50(1): 194-204. |
| Huang Yuzhou, Wang Lisong, Qin Xiaolin. Bi-level Path Planning Method for Unmanned Vehicle Based on Deep Reinforcement Learning[J]. Computer Science, 2023, 50(1): 194-204. | |
| 22 | Fox D, Burgard W, Thrun S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| 23 | 奚玉荣. 基于单目图像的三维火星地形重构方法研究[D]. 长春: 吉林大学, 2022. |
| Xi Yurong. Research on 3D Martian Terrain Reconstruction Method Based on Monocular Image[D]. Changchun: Jilin University, 2022. | |
| 24 | 韩浦霞. 基于双目视觉的嫦娥三号月球高程值计算[D]. 天津: 天津理工大学, 2018. |
| Han Puxia. The Calculation of the Lunar Elevation Value of Chang'E3 Based on Binocular Vision[D]. Tianjin: Tianjin University of Technology, 2018. | |
| 25 | 巩绪生. 基于三维地形的人机协同路径规划[D]. 长沙: 国防科学技术大学, 2006. |
| Gong Xusheng. Human-machine Cooperation Path Planning Based on Three Dimensional Terrain[D]. Changsha: National University of Defense Technology, 2006. | |
| 26 | 郭延宁, 冯振, 马广富, 等. 行星车视觉导航与自主控制进展与展望[J]. 宇航学报, 2018, 39(11): 1185-1196. |
| Guo Yanning, Feng Zhen, Ma Guangfu, et al. Advances and Trends in Visual Navigation and Autonomous Control of a Planetary Rover[J]. Journal of Astronautics, 2018, 39(11): 1185-1196. |
| [1] | Dong Zhiming, Hu Zhongqi, Dai Haoran, Gao Jiancheng. An Automated Generation Method for Combat Simulation Scenarios Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1129-1145. |
| [2] | Li Xiaonan, Chao Tao, Ma Ping, Yang Ming, Wang Yuxuan. Robust Identification of Black-box Nonlinear SSM Using Expectation-maximization [J]. Journal of System Simulation, 2026, 38(5): 1146-1158. |
| [3] | Liu Yingang, Ma Ming, Zhang Ronghua. Dynamic Task Planning for Wargaming Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1187-1204. |
| [4] | Su Hongjia, Zhang Cheng, Liu Fei. SoS Effectiveness Evaluation Method Based on Fuzzy Functional Dependency Network Analysis [J]. Journal of System Simulation, 2026, 38(5): 1224-1238. |
| [5] | Mei Huawei, Yang Penghui, Yu Yang. Ultra-short-term Photovoltaic Power Prediction Based on Improved PatchTST Considering Data Drift [J]. Journal of System Simulation, 2026, 38(5): 1239-1254. |
| [6] | Li Quan, Su Peng, Wan Haiying, Zhang Chengxi, He Zhijian, Ni Yiyang, Zhao Zhonggai, Liu Fei. Modeling of Penicillin Fermentation Process Based on a Multi-stage LHS-EPRCC Method [J]. Journal of System Simulation, 2026, 38(5): 1255-1276. |
| [7] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [8] | Shi Min, Guo Shisheng, Wang Suqin, Li Zhaoxin, Zhu Dengming. Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors [J]. Journal of System Simulation, 2026, 38(5): 1290-1302. |
| [9] | Jiang Yanji, Xiao Xingyi, Dong Hao, Yu Miao, Huang Jinshan, Liu Daqian, Fei Bowen. Detection Method for 3D Lanes Based on Graph Relationship Optimization Integrating Point and Lane Features [J]. Journal of System Simulation, 2026, 38(5): 1303-1319. |
| [10] | Zhang Xin, Zhang Ping, Zhang Chen, Liu Wei, Han Boyang. Research on Calculation Model of Excavation Resistance Under Heterogeneous Soil Conditions [J]. Journal of System Simulation, 2026, 38(5): 1320-1332. |
| [11] | Wang Wei, Liu Dong, Cui Xinhao, Li Bo, Xiao Yiyong, Ren Yi. Multi-level Digital Model of Dynamic Earned Value Management for Complex Engineering Projects and Its Applications [J]. Journal of System Simulation, 2026, 38(5): 1350-1364. |
| [12] | Peng Lijun, Su Tingqi, Liu Peijin, He Lin, Zhou Xiewu, Zhang Minxin. Detection Method for Laboratory PPE Compliance Wearing Based on Human Key Points [J]. Journal of System Simulation, 2026, 38(5): 1365-1382. |
| [13] | Teng Jing, Tong Wencong, Zhang Zhongjie, Yao Xing, Li Junxian. Automatic Speed Guidance Method and Simulation Evaluation for Trams at Intersections [J]. Journal of System Simulation, 2026, 38(5): 1426-1439. |
| [14] | Jiang Shengchao, Pei Yunqing, Zhai Hongying, Wu Guojian, Gao Fang. Power Flow Calculation Based on Block-encoded Adiabatic Quantum Newton-Raphson Method [J]. Journal of System Simulation, 2026, 38(5): 1453-1465. |
| [15] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
