

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (1): 271-283.doi: 10.16182/j.issn1004731x.joss.23-1035
• Papers • Previous Articles Next Articles
Huang Qiushi1,3, Wang Yanyang1,2, Wu Changliang1,2, Huang Junfu3, Zhang Shenggen3, Luo Haoxuan3
Received:2023-08-21
Revised:2023-10-11
Online:2025-01-20
Published:2025-01-23
Contact:
Wang Yanyang
CLC Number:
Huang Qiushi, Wang Yanyang, Wu Changliang, Huang Junfu, Zhang Shenggen, Luo Haoxuan. Cooperative Control Method of Mixed Traffic at Signalized Intersection[J]. Journal of System Simulation, 2025, 37(1): 271-283.

Fig. 1
Schematic diagram of mixed traffic at intersection
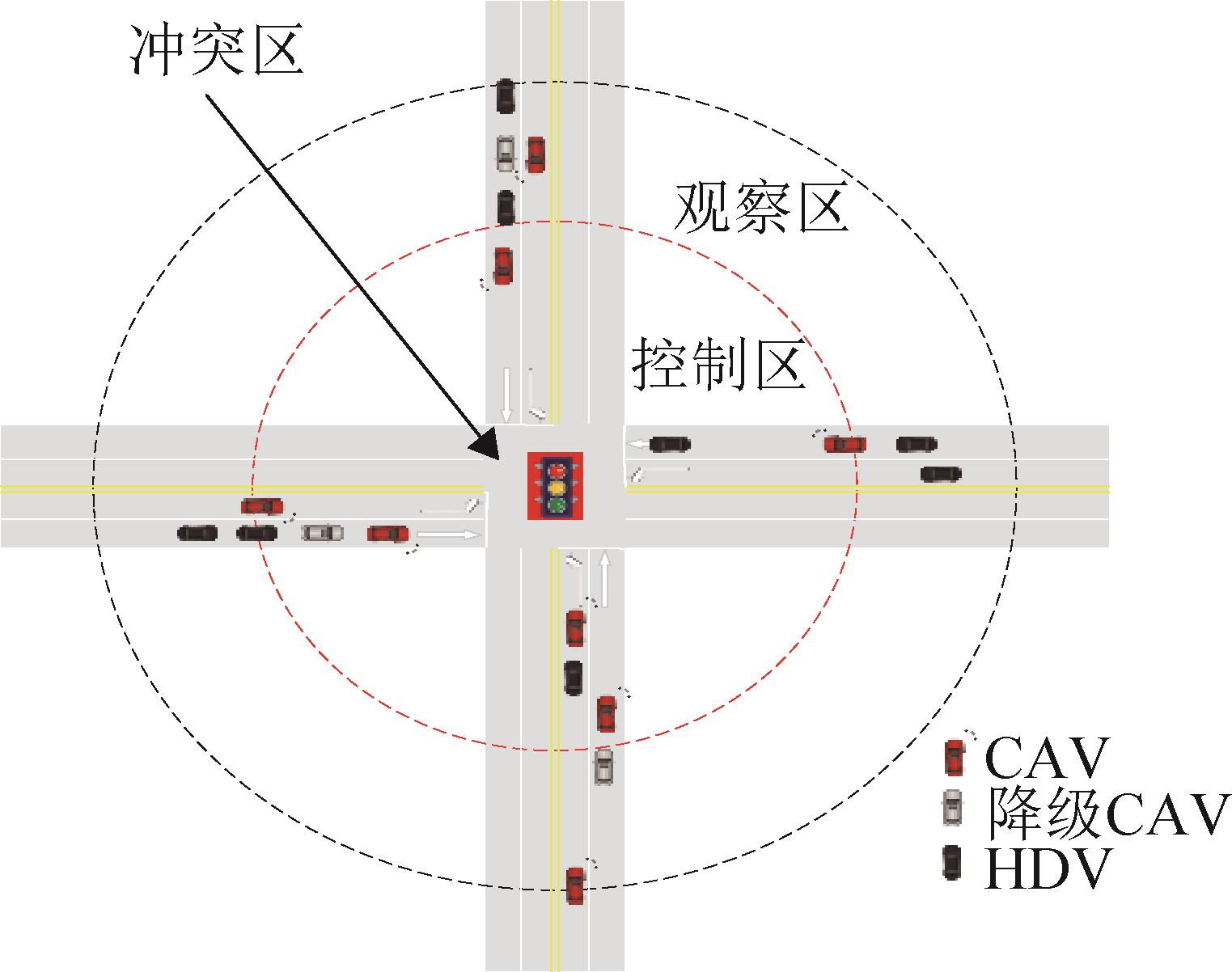
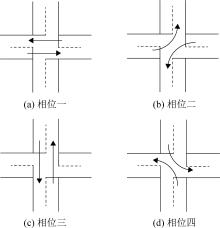
Fig. 2
Phase design schematic
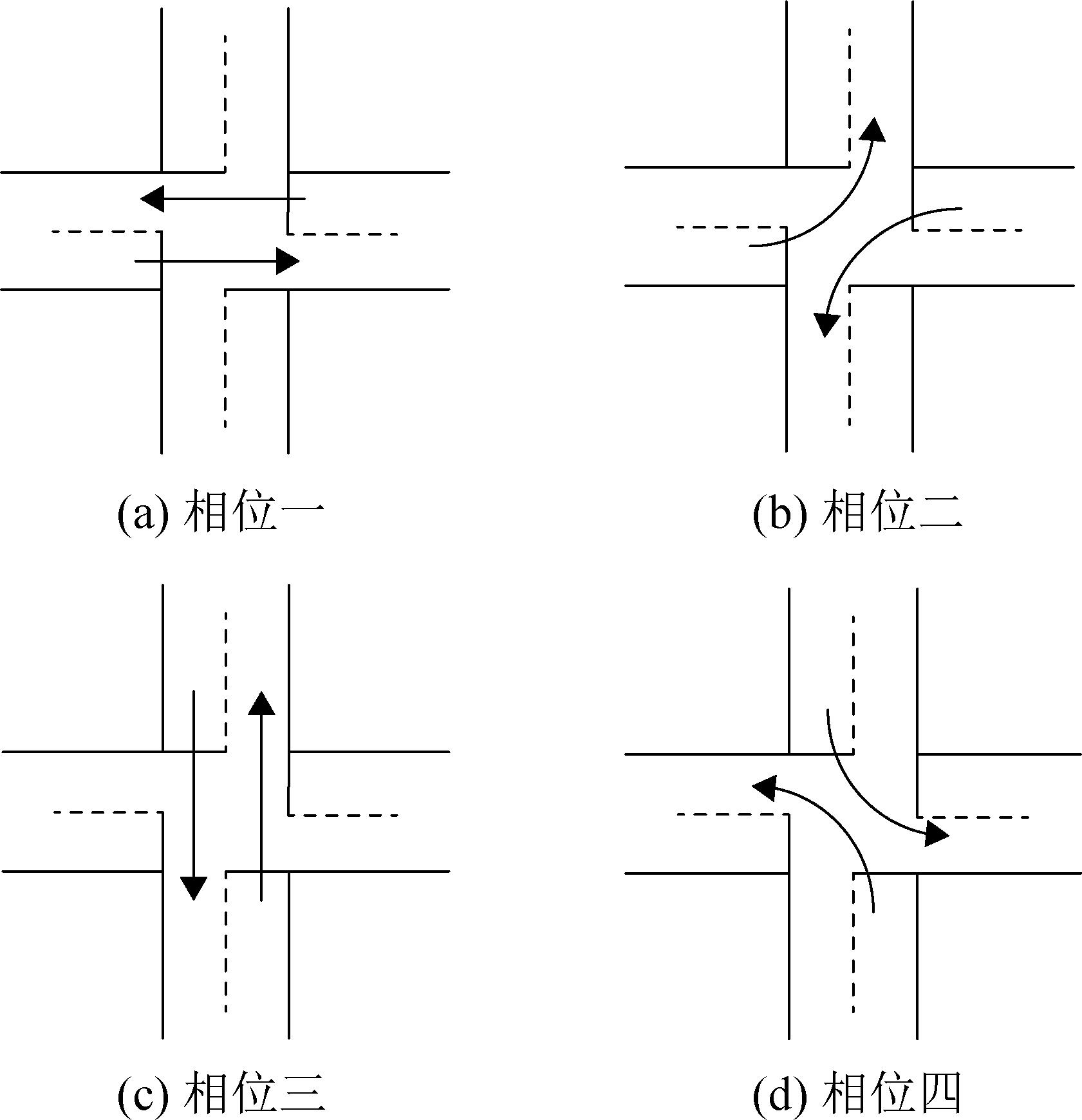
Fig. 3
Optimal framework for upper and lower layer cooperative control
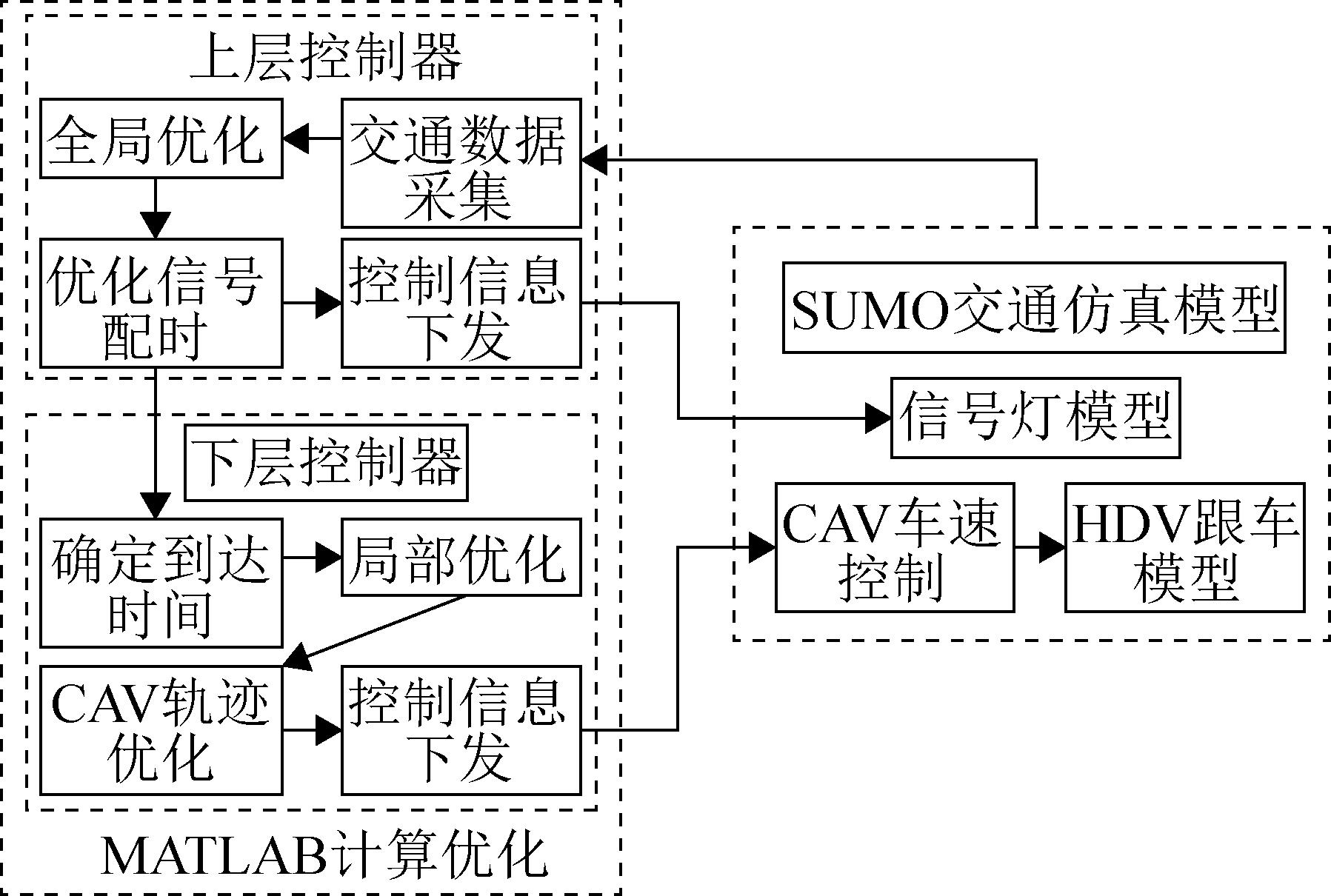
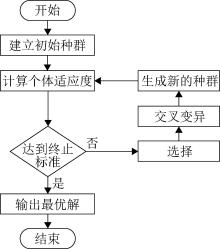
Fig. 4
Genetic algorithm flow chart
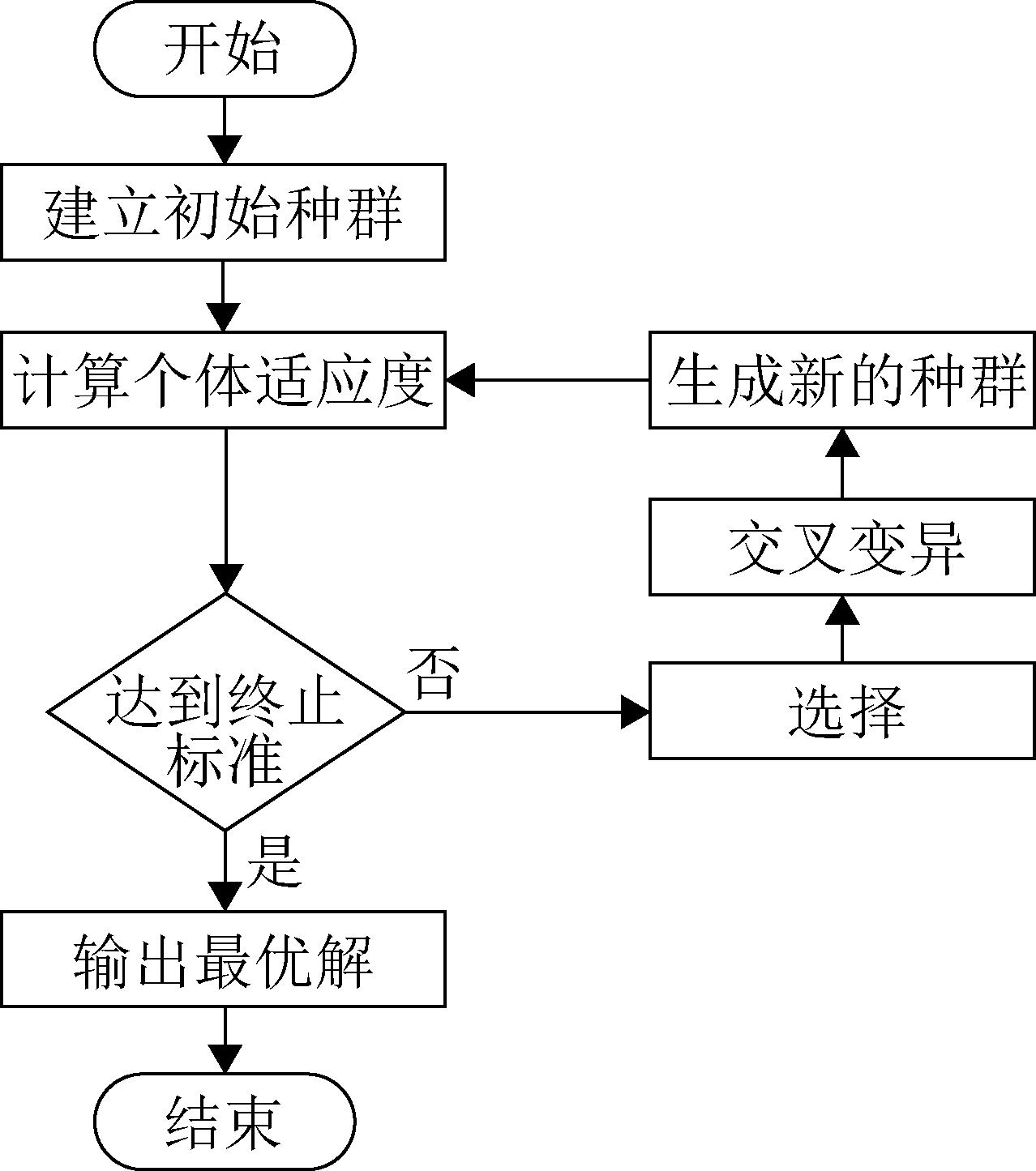
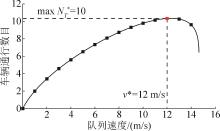
Fig. 5
Relationship between platoon speed and number of passes in equilibrium
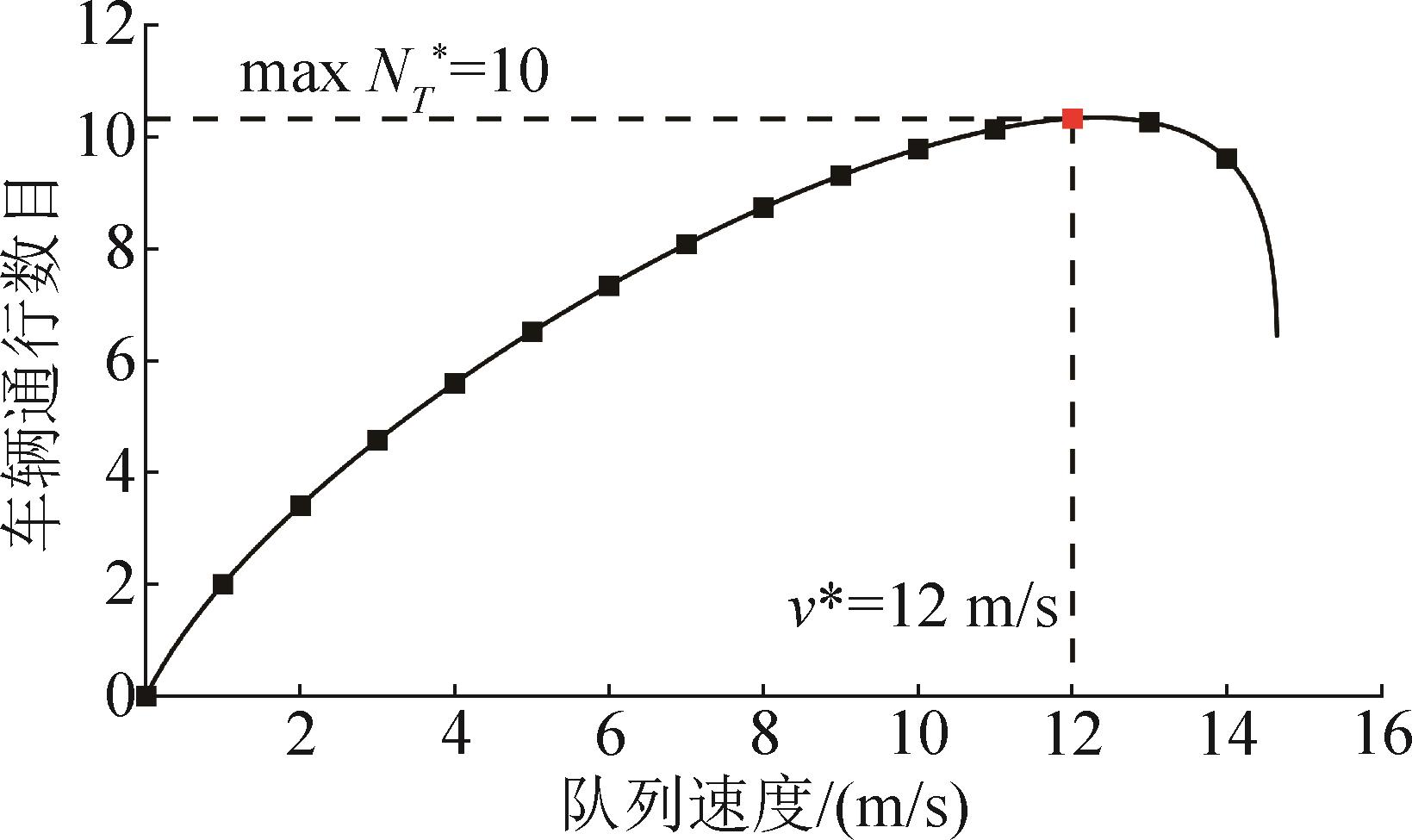
Fig. 6
Mixed platoon control algorithm flow chart
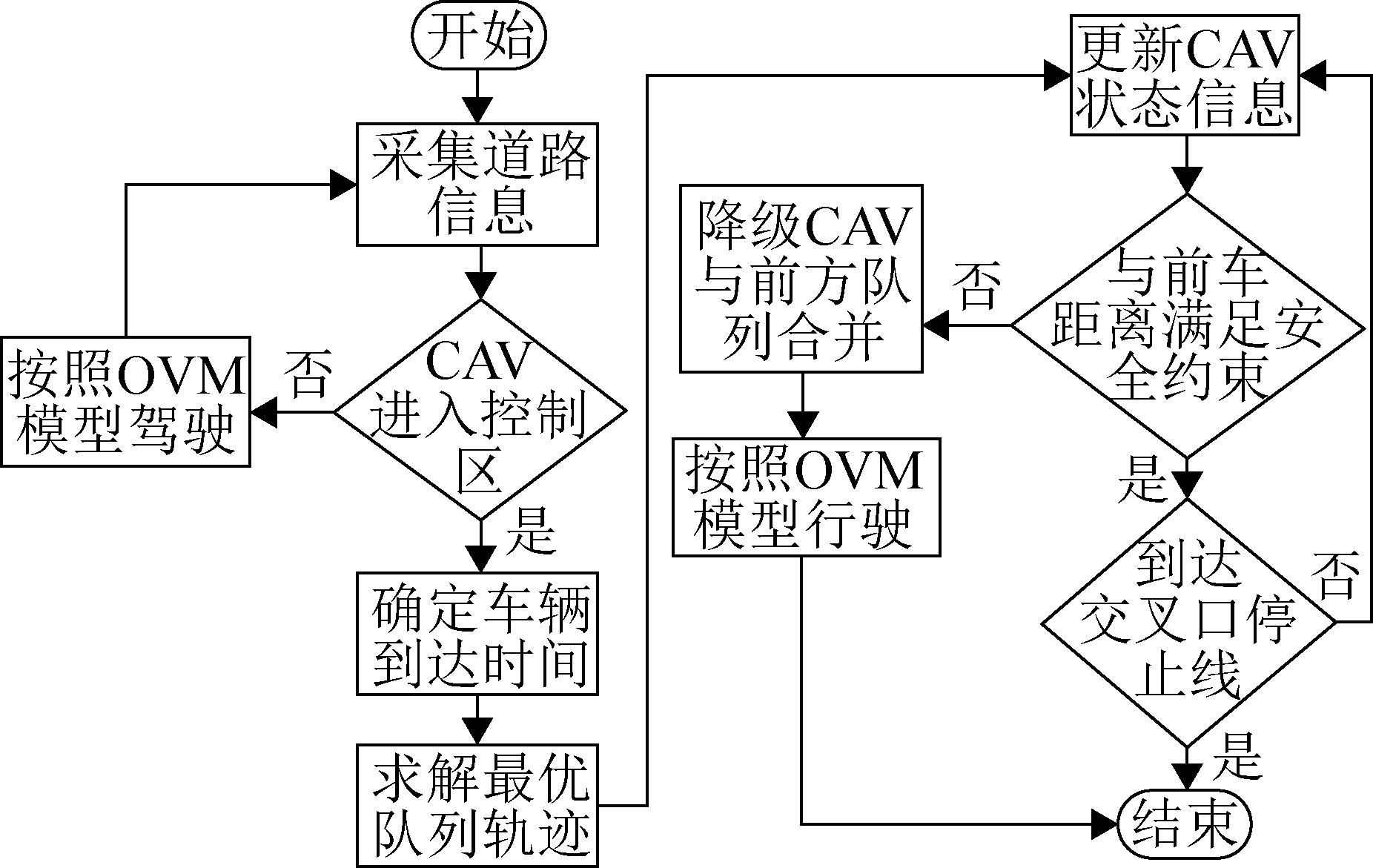
Table 1
The traffic flow: balanced traffic flow in each lane
| 交通场景 | 东进口 | 西进口 | 南进口 | 北进口 | ||||
|---|---|---|---|---|---|---|---|---|
| 直行 | 左转 | 直行 | 左转 | 直行 | 左转 | 直行 | 左转 | |
| 低 | 255 | 164 | 225 | 152 | 243 | 147 | 213 | 160 |
| 中 | 391 | 238 | 365 | 262 | 378 | 249 | 383 | 245 |
| 高 | 585 | 430 | 578 | 432 | 602 | 411 | 583 | 426 |
Table 2
The traffic flow: unbalanced traffic flow in each lane
| 交通场景 | 东进口 | 西进口 | 南进口 | 北进口 | ||||
|---|---|---|---|---|---|---|---|---|
| 直行 | 左转 | 直行 | 左转 | 直行 | 左转 | 直行 | 左转 | |
| I | 325 | 251 | 181 | 164 | 261 | 147 | 174 | 162 |
| II | 223 | 235 | 405 | 333 | 412 | 334 | 383 | 221 |
| III | 601 | 405 | 413 | 217 | 612 | 390 | 350 | 262 |
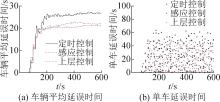
Fig. 7
Vehicle delay time: low-peak period
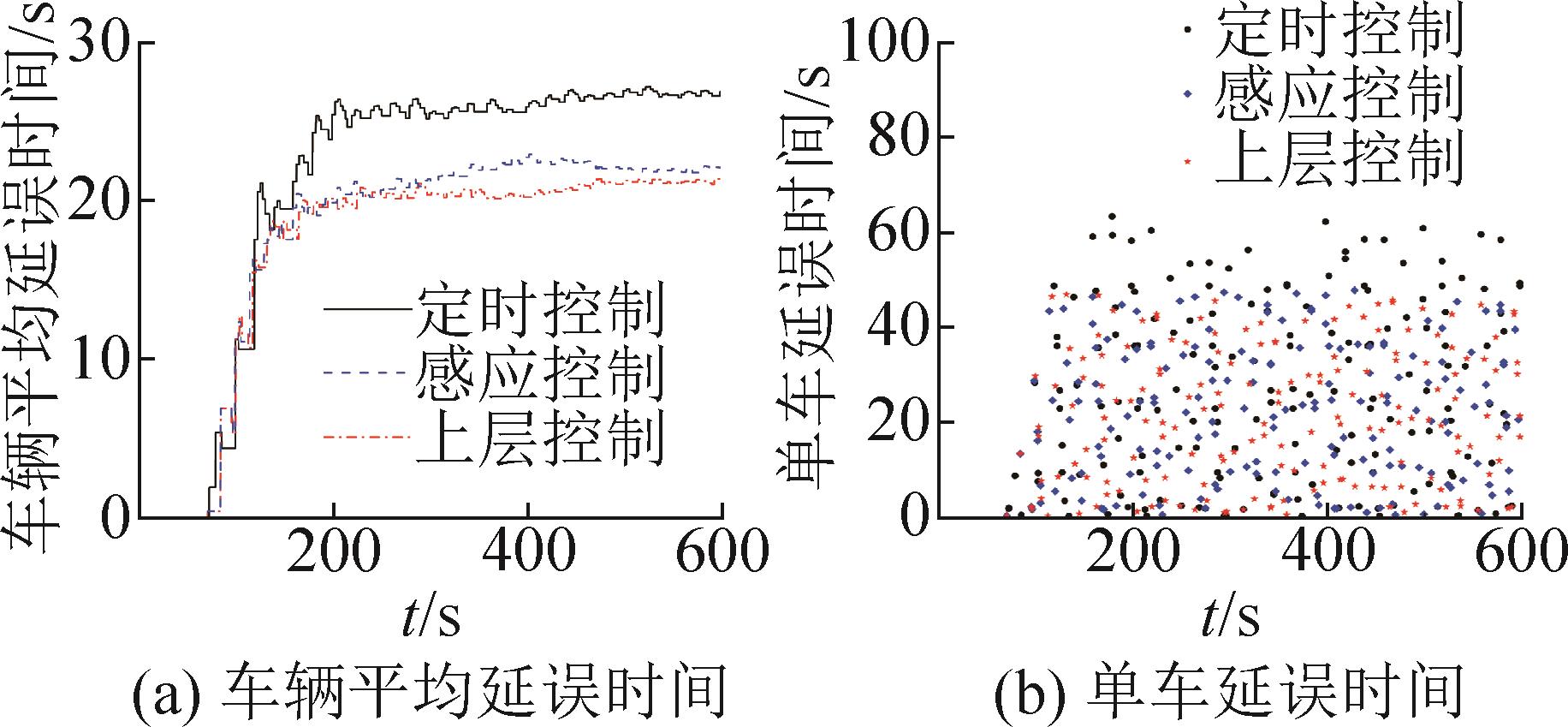
Fig. 8
Vehicle delay time: mid-peak period
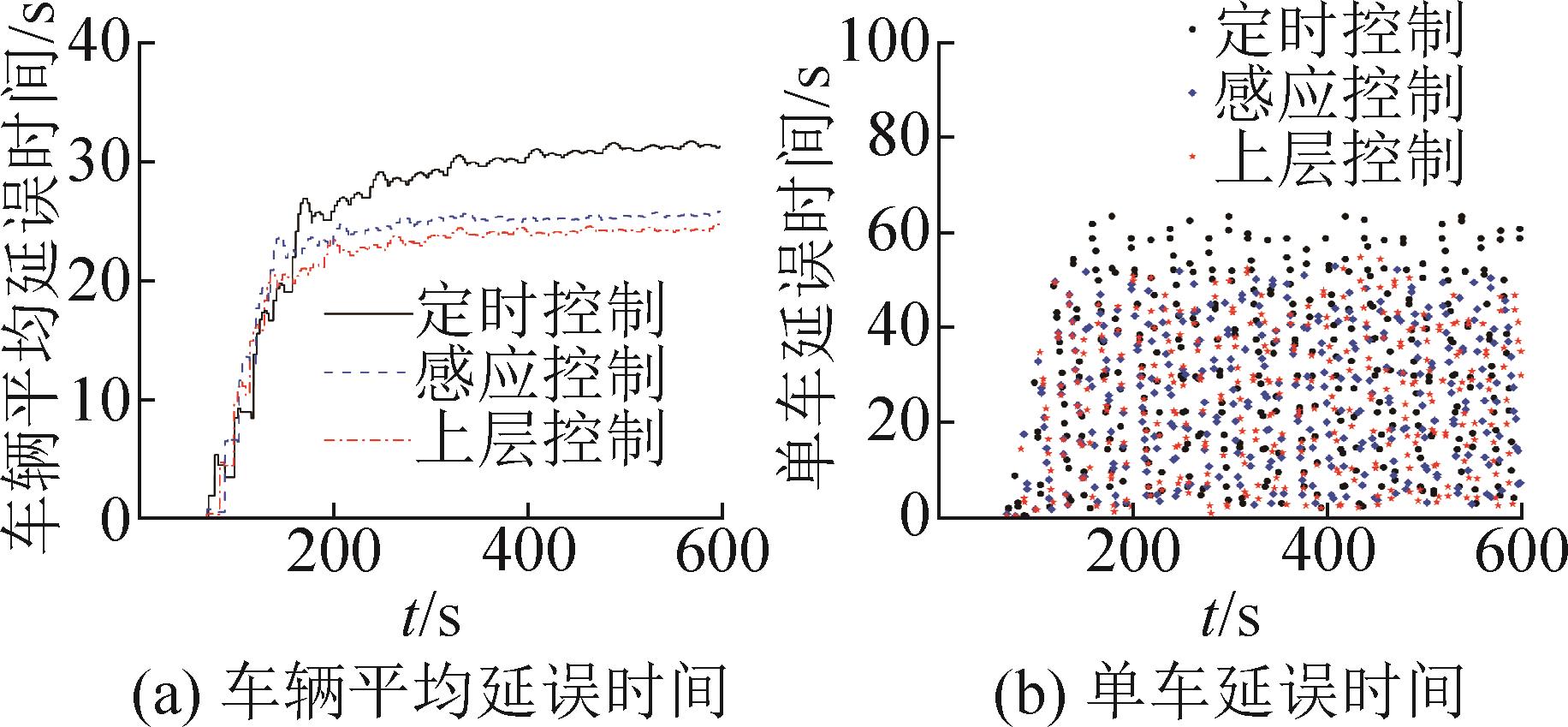
Fig. 9
Vehicle delay time: high-peak period
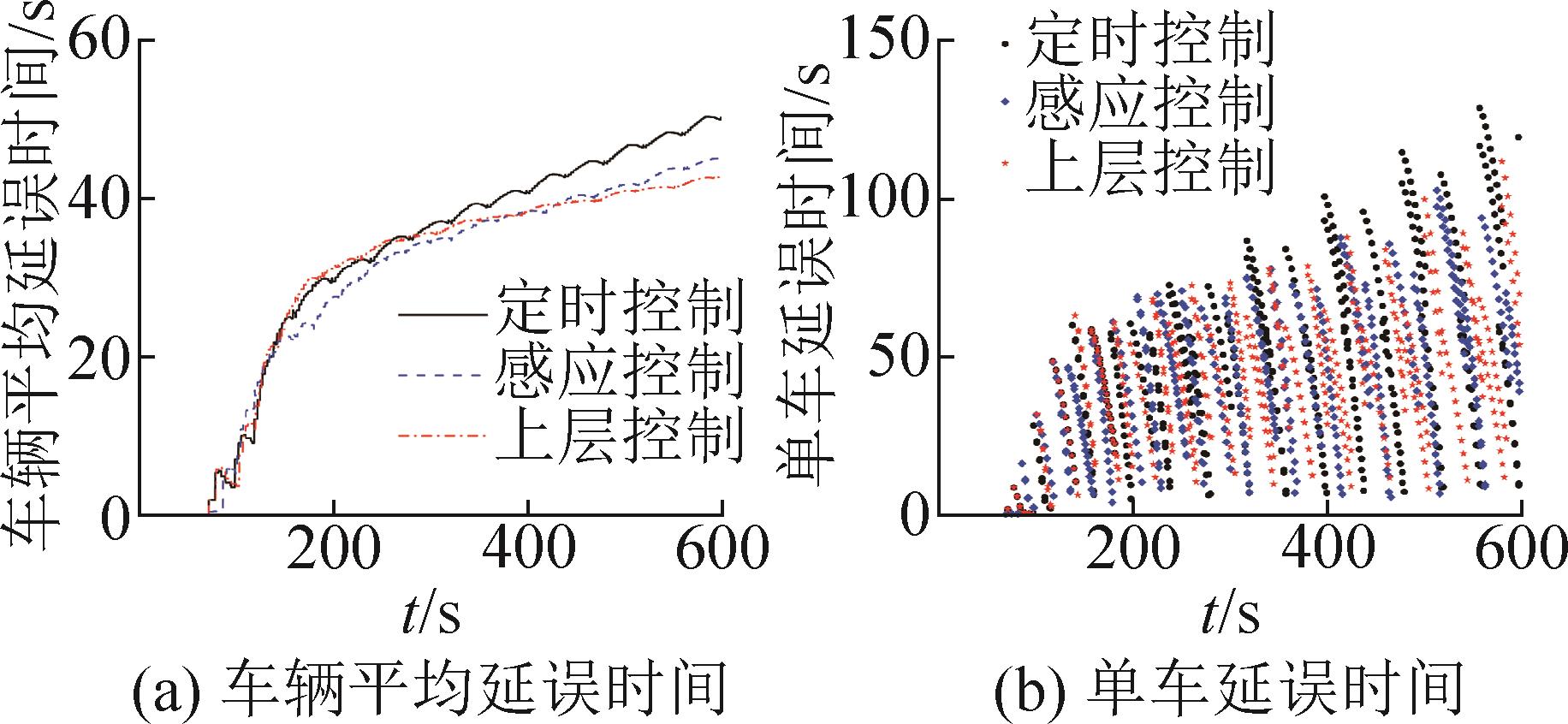

Fig. 10
Vehicle delays time: unbalanced traffic flow I
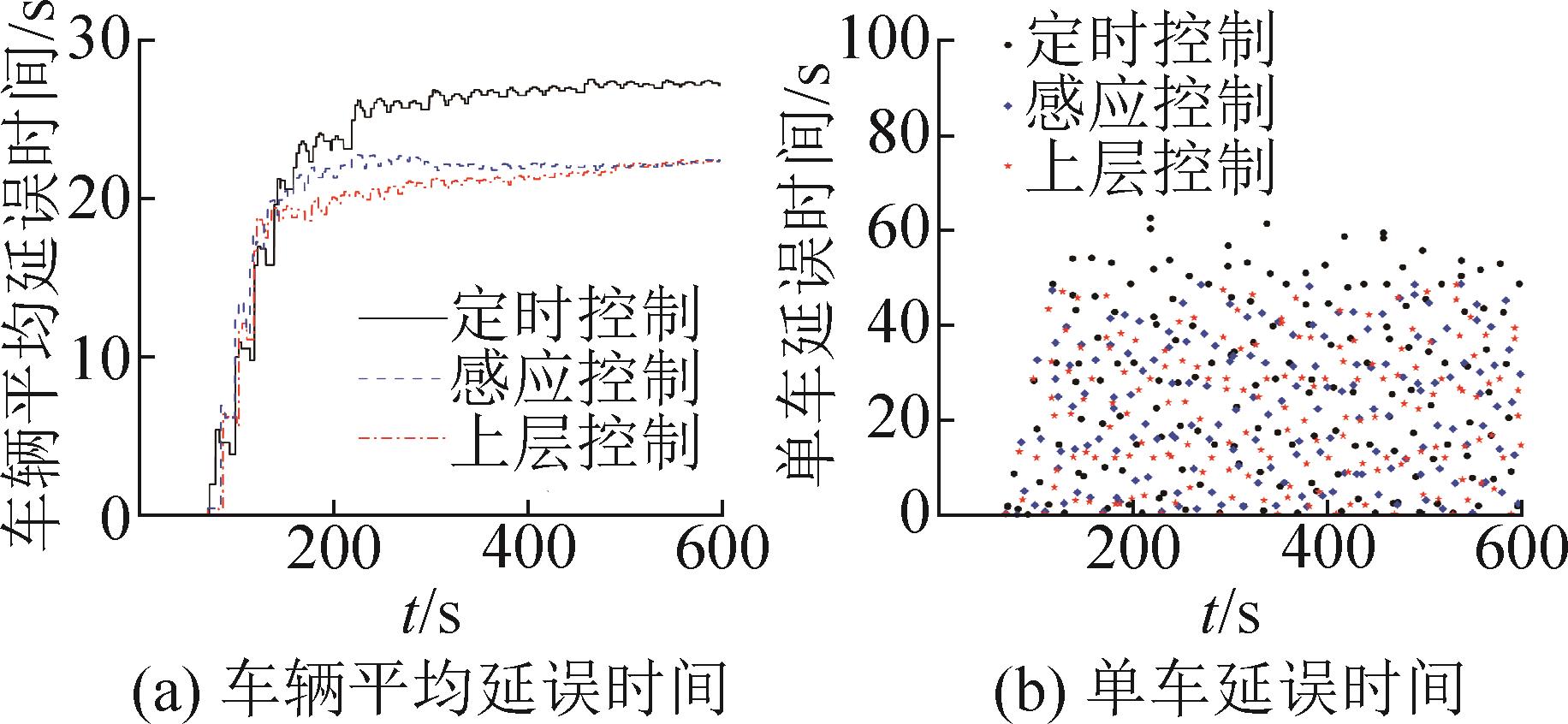
Fig. 11
Vehicle delays time: unbalanced traffic flow II
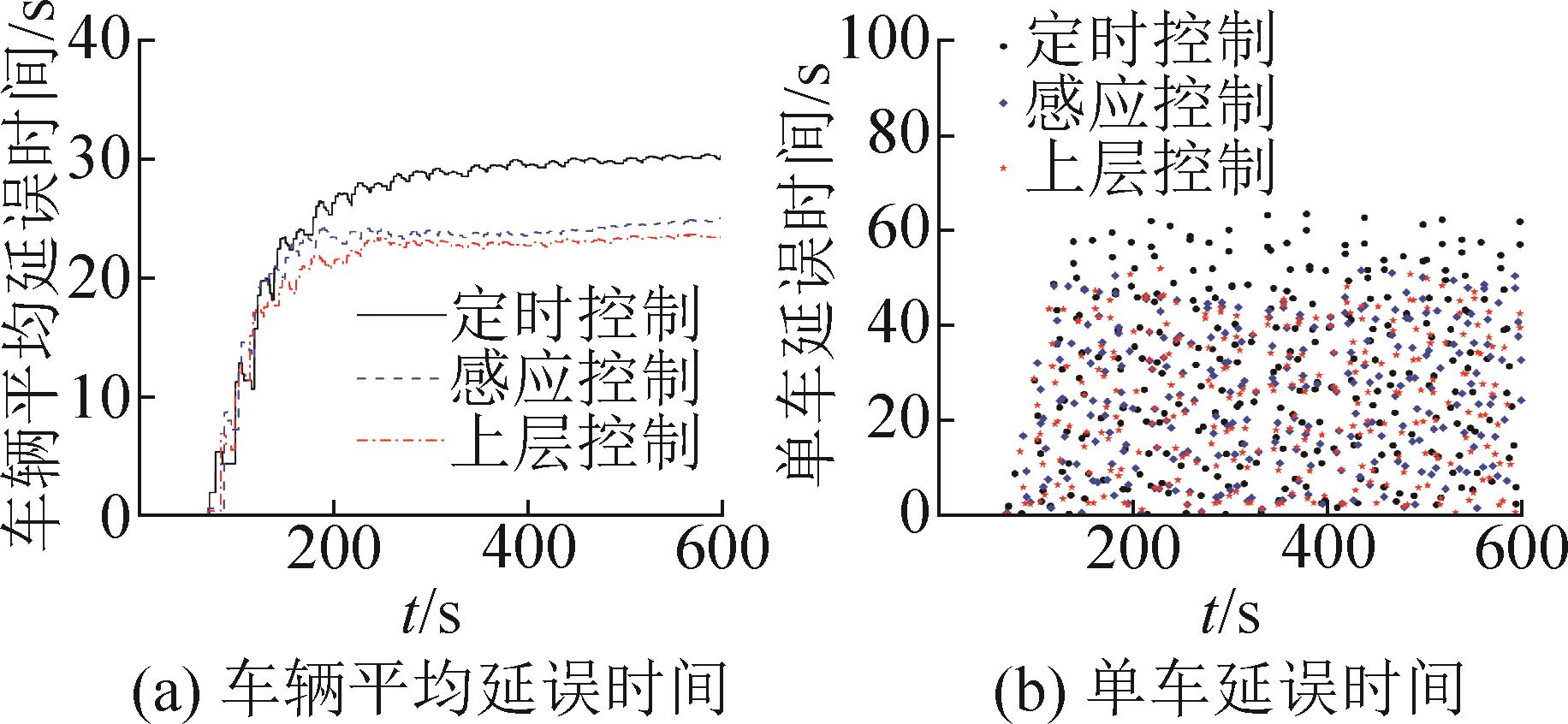
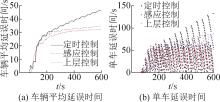
Fig. 12
Vehicle delays time: unbalanced traffic flow II
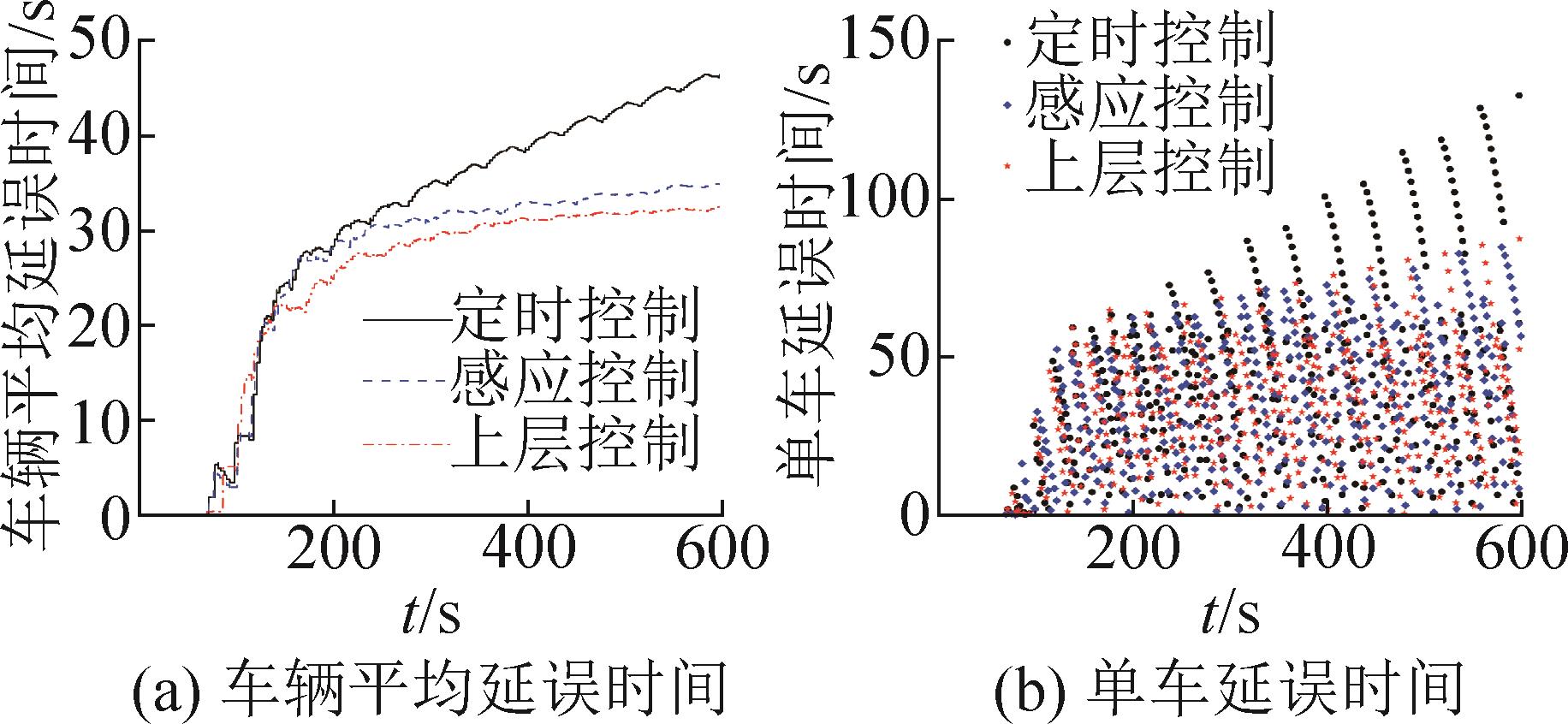

Fig. 13
Method performance comparison: different controls
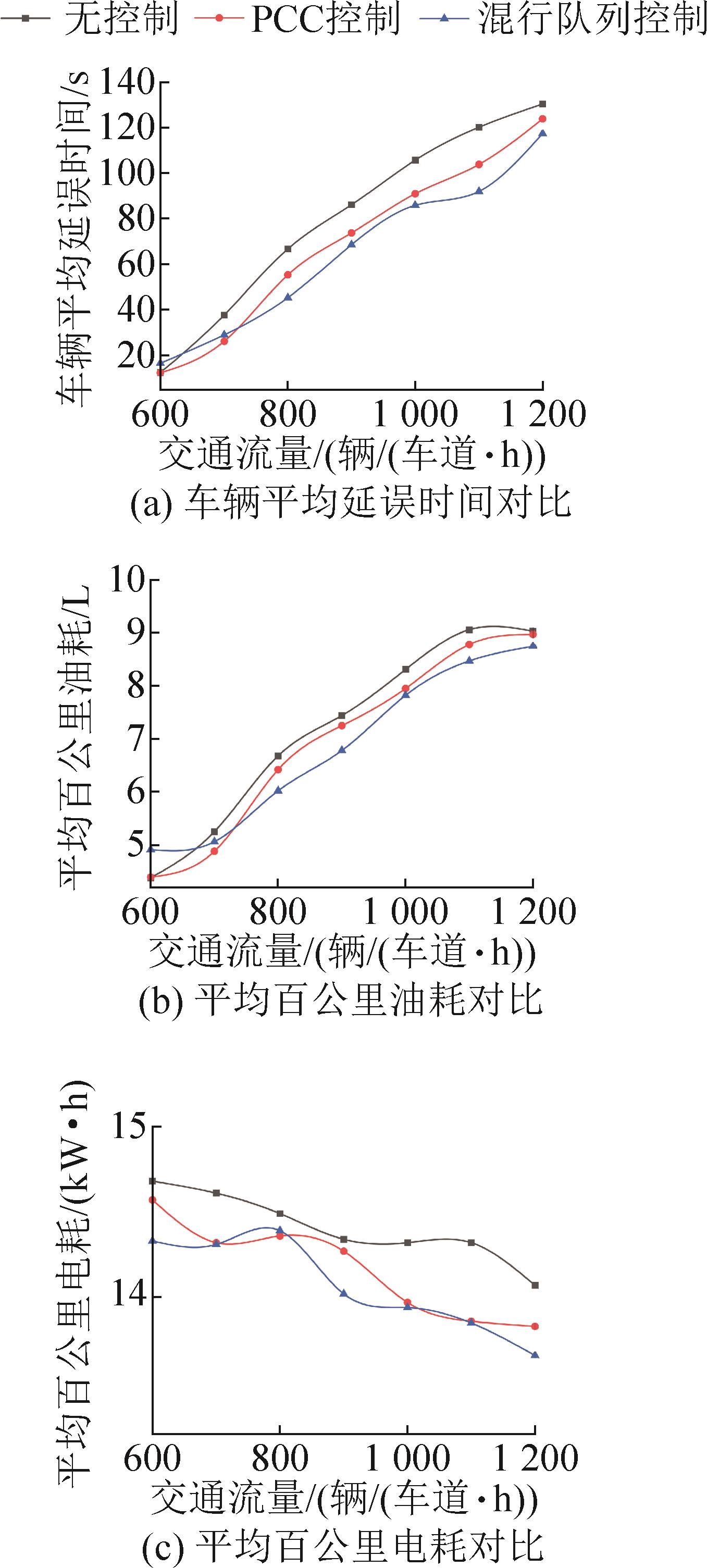

Fig. 14
900 vehicle/(lane·hour) vehicle traffic situation
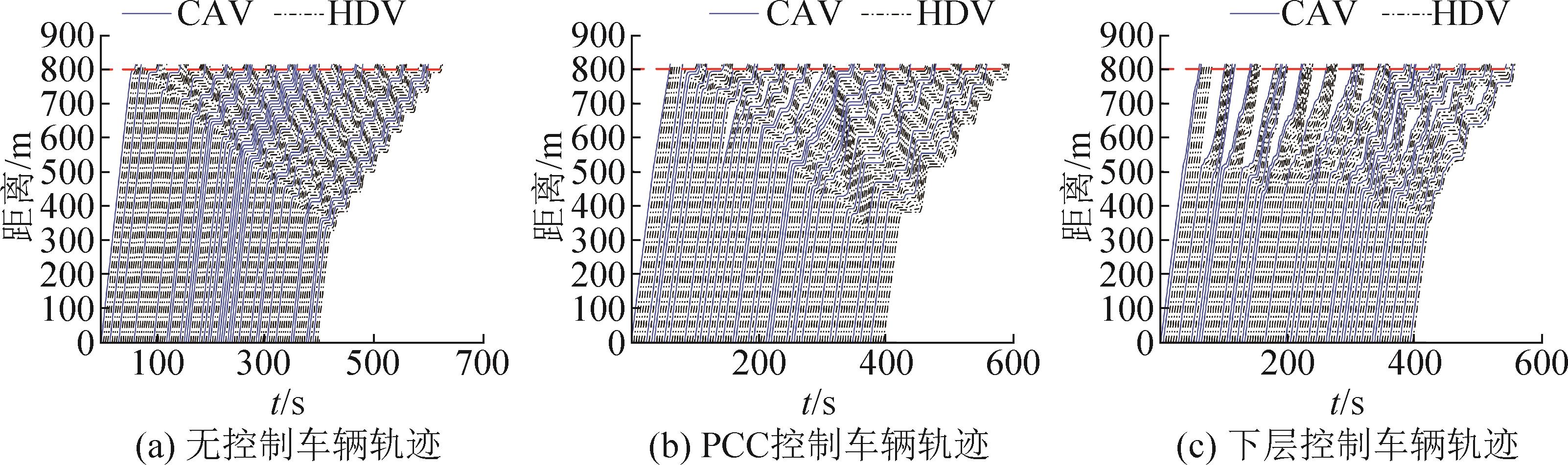
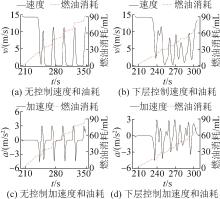
Fig. 15
Comparison of speed, acceleration and fuel consumption: No. 52 vehicle
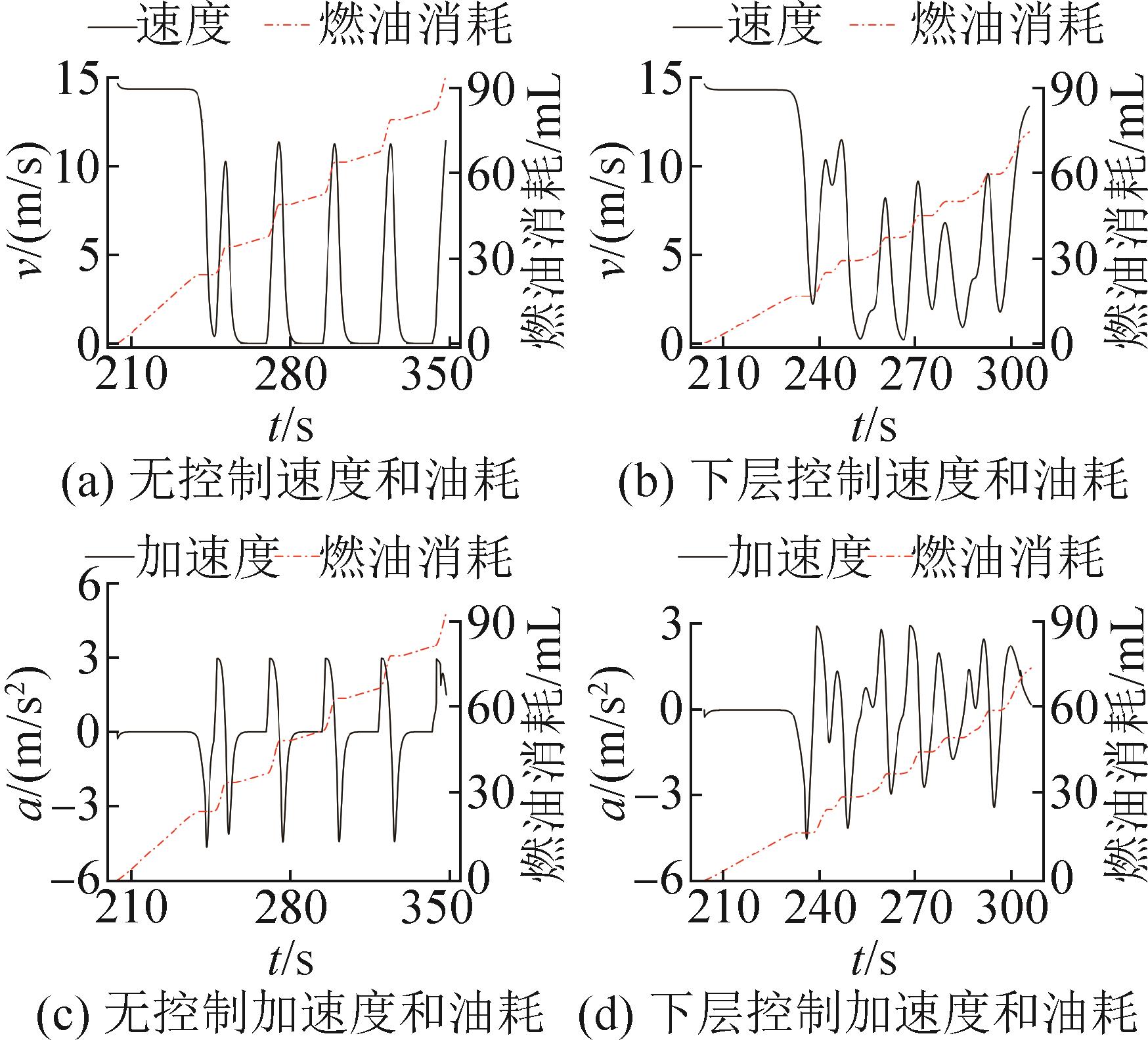
Fig. 16
Comparison of speed, acceleration and fuel consumption: No. 61 vehicle
Table 3
Basic simulation parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 仿真步长/s | 0.1 | 道路长度/m | 800 |
| 最大加速度/(m/s2) | 3 | 控制区长度/m | 300 |
| 最小加速度/(m/s2) | -6 | 实际绿灯时长/s | 20 |
| 终态位置权重 | 105 | 黄灯时长/s | 2 |
| 终态速度权重 | 104 | 总车辆数 | 240 |
| 最高速度/(m/s) | 15 | 最低速度/(m/s) | 0 |
| 交叉比例 | 0.9 | 最大迭代次数 | 500 |
| 种群大小 | 100 | 变异概率 | 0.1 |

Fig. 17
Method performance comparison: balanced traffic
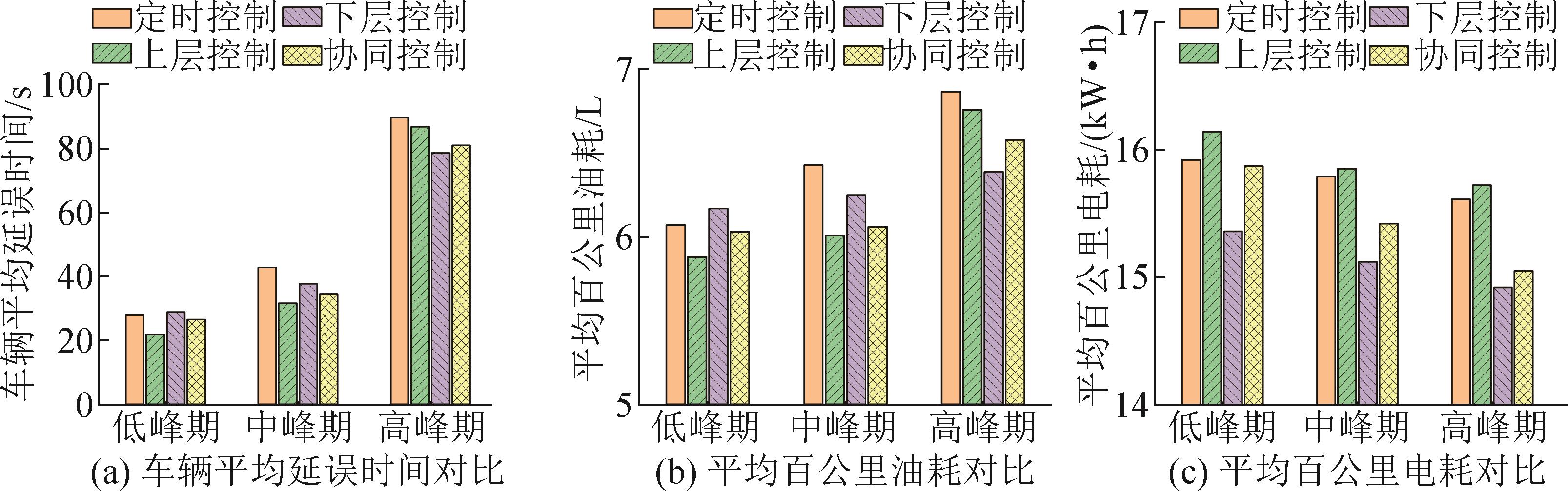

Fig. 18
Method performance comparison: unbalanced traffic
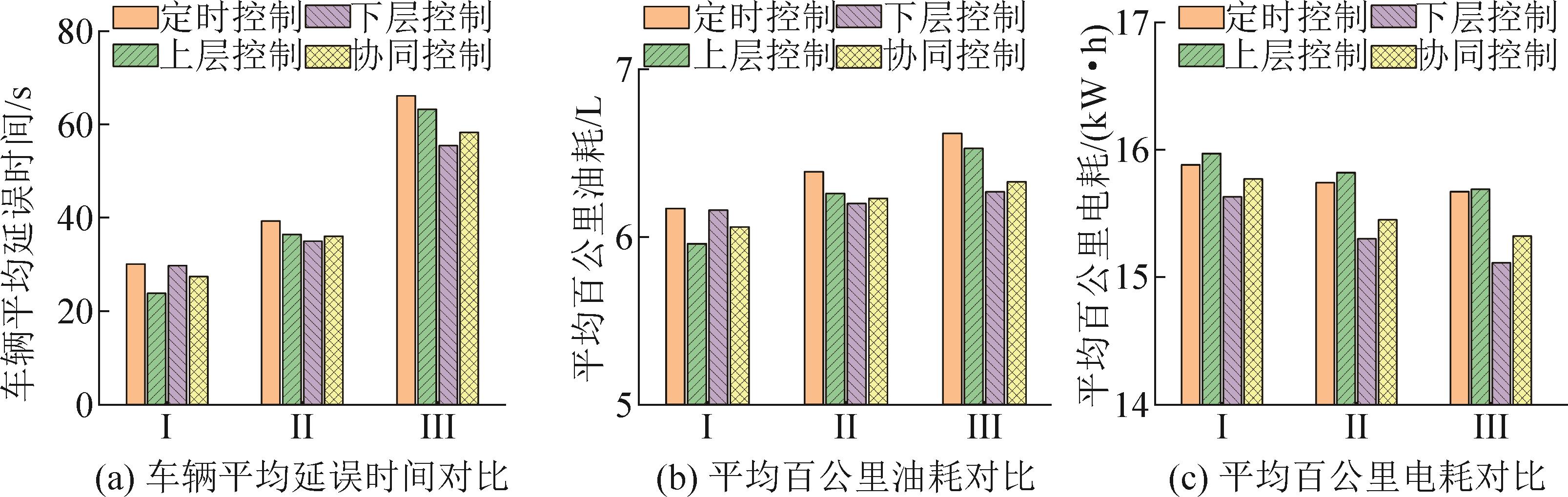
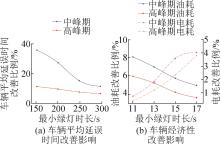
Fig. 19
Method performance: minimum green light
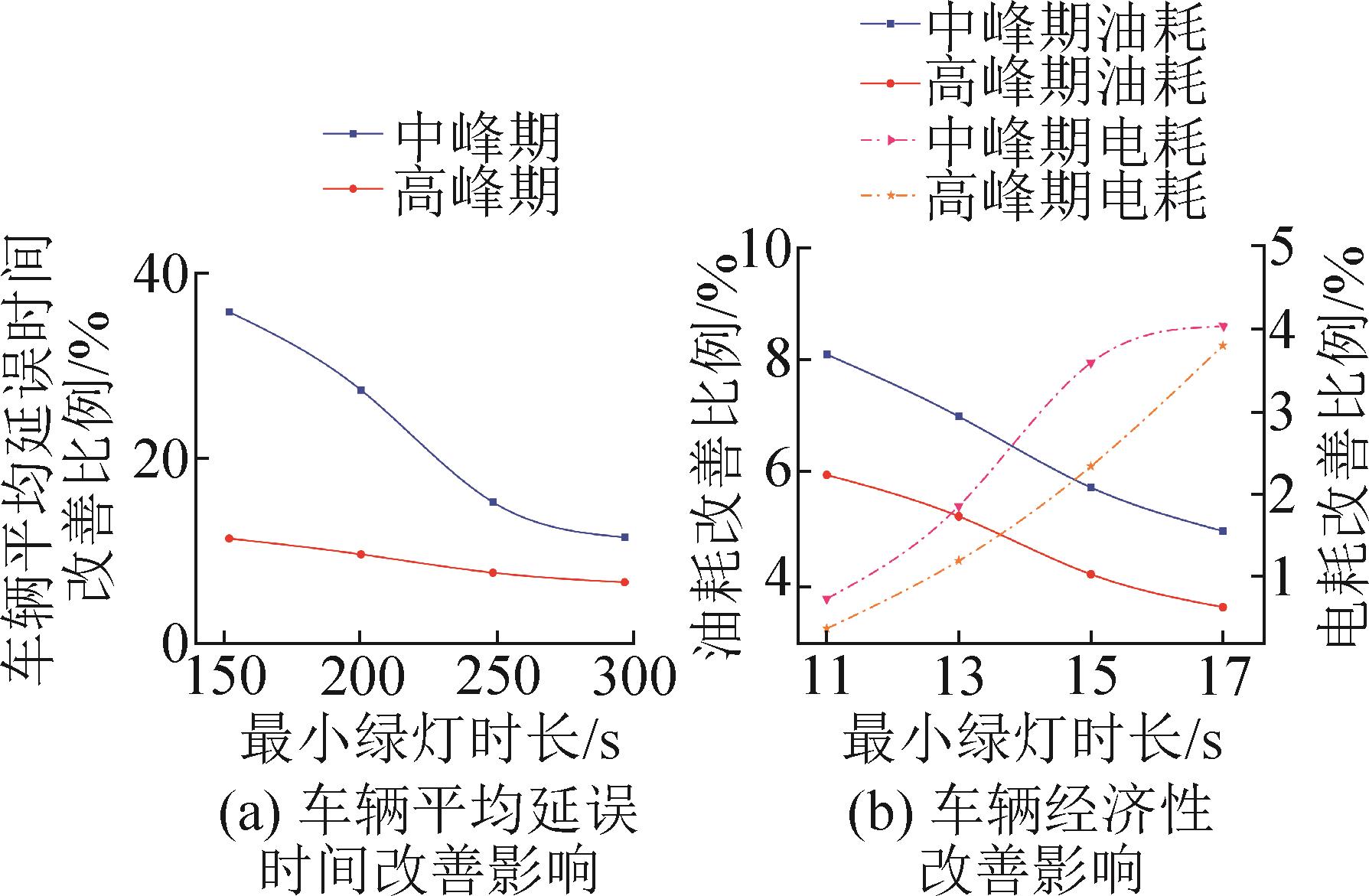

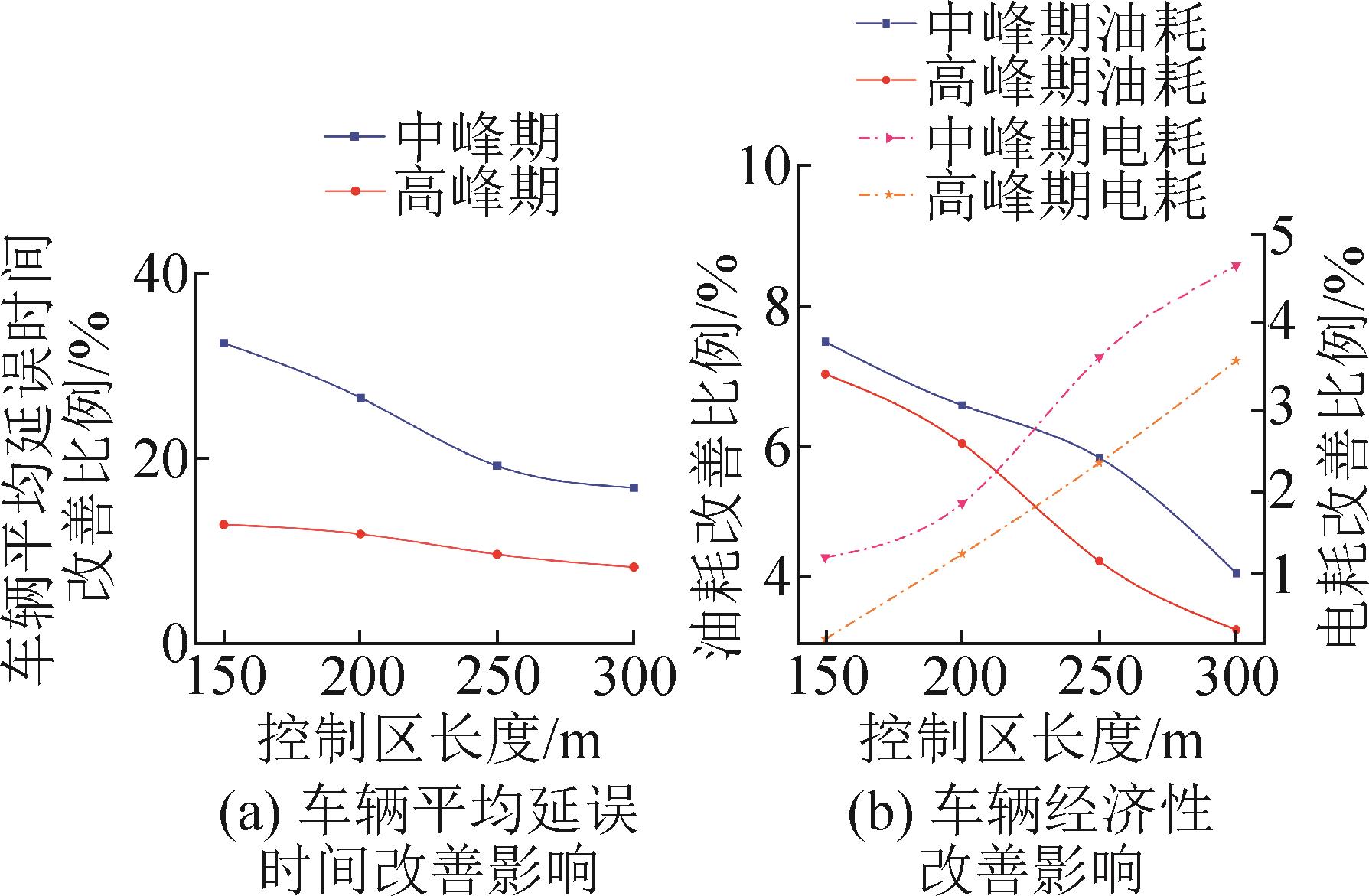
Fig. 20
Method performance: control zone length
| 1 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| Li Keqiang, Dai Yifan, Li Shengbo, et al. State-of-the-art and Technical Trends of Intelligent and Connected Vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. | |
| 2 | Tajalli M, Mehrabipour M, Hajbabaie A. Network-level Coordinated Speed Optimization and Traffic Light Control for Connected and Automated Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 6748-6759. |
| 3 | Lee J, Park B, Yun I. Cumulative Travel-time Responsive Real-time Intersection Control Algorithm in the Connected Vehicle Environment[J]. Journal of Transportation Engineering, 2013, 139(10): 1020-1029. |
| 4 | Liang Xiao, Guler S I, Gayah V V. A Heuristic Method to Optimize Generic Signal Phasing and Timing Plans at Signalized Intersections Using Connected Vehicle Technology[J]. Transportation Research Part C: Emerging Technologies, 2020, 111: 156-170. |
| 5 | Feng Yiheng, Head K L, Khoshmagham S, et al. A Real-time Adaptive Signal Control in a Connected Vehicle Environment[J]. Transportation Research Part C: Emerging Technologies, 2015, 55: 460-473. |
| 6 | Han Xiao, Ma Rui, Zhang H M. Energy-aware Trajectory Optimization of CAV Platoons Through a Signalized Intersection[J]. Transportation Research Part C: Emerging Technologies, 2020, 118: 102652. |
| 7 | Wan Nianfeng, Vahidi A, Luckow A. Optimal Speed Advisory for Connected Vehicles in Arterial Roads and the Impact on Mixed Traffic[J]. Transportation Research Part C: Emerging Technologies, 2016, 69: 548-563. |
| 8 | Ma Jiaqi, Li Xiaopeng, Zhou Fang, et al. Parsimonious Shooting Heuristic for Trajectory Design of Connected Automated Traffic Part II: Computational Issues and Optimization[J]. Transportation Research Part B: Methodological, 2017, 95: 421-441. |
| 9 | Xu Biao, Ban Xuegang, Bian Yougang, et al. Cooperative Method of Traffic Signal Optimization and Speed Control of Connected Vehicles at Isolated Intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1390-1403. |
| 10 | Guo Yi, Ma Jiaqi, Xiong Chenfeng, et al. Joint Optimization of Vehicle Trajectories and Intersection Controllers with Connected Automated Vehicles: Combined Dynamic Programming and Shooting Heuristic Approach[J]. Transportation Research Part C: Emerging Technologies, 2019, 98: 54-72. |
| 11 | Yu Chunhui, Feng Yiheng, Liu X, et al. Integrated Optimization of Traffic Signals and Vehicle Trajectories at Isolated Urban Intersections[J]. Transportation Research Part B: Methodological, 2018, 112: 89-112. |
| 12 | Akcelik R. Traffic Signals: Capacity and Timing Analysis[M]. Melbourne, Australian: Publication of Australian Road Research Board, 1981. |
| 13 | Helbing Dirk, Tilch Benno. Generalized Force Model of Traffic Dynamics[J]. Physical Review E, 1998, 58(1): 133-138. |
| 14 | Chen Chaoyi, Wang Jiawei, Xu Qing, et al. Mixed Platoon Control of Automated and Human-driven Vehicles at a Signalized Intersection: Dynamical Analysis and Optimal Control[J]. Transportation Research Part C: Emerging Technologies, 2021, 127: 103138. |
| 15 | Akcelik Rahmi. Efficiency and Drag in the Power-based Model of Fuel Consumption[J]. Transportation Research Part B: Methodological, 1989, 23(5): 376-385. |
| 16 | Fiori C, Ahn K, Rakha H A. Power-based Electric Vehicle Energy Consumption Model: Model Development and Validation[J]. Applied Energy, 2016, 168: 257-268. |
| 17 | Pablo Alvarez Lopez, Behrisch Michael, Bieker-Walz Laura, et al. Microscopic Traffic Simulation Using SUMO[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Piscataway: IEEE, 2018: 2575-2582. |
| 18 | Asadi B, Vahidi A. Predictive Cruise Control: Utilizing Upcoming Traffic Signal Information for Improving Fuel Economy and Reducing Trip Time[J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 707-714. |
| [1] | Teng Jing, Tong Wencong, Zhang Zhongjie, Yao Xing, Li Junxian. Automatic Speed Guidance Method and Simulation Evaluation for Trams at Intersections [J]. Journal of System Simulation, 2026, 38(5): 1426-1439. |
| [2] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [3] | Gong Feng, Jiang Tao, Zhang Qin, Liu Yu. Simulation and Optimization of Support Processes for Aircraft Fleet Launch Under Limited Resources [J]. Journal of System Simulation, 2025, 37(8): 1965-1977. |
| [4] | Chen Kun, Chen Liang, Xie Jiming, Liu Fengbo, Chen Taixiong, Wei Lukuan. Simulation Study on Adaptive Signal Control of Deformed Intersection Based on LSTM-GNN [J]. Journal of System Simulation, 2025, 37(6): 1343-1351. |
| [5] | Chen Juan, Zheng Wang, Liu Qianqian, Lu Bin. Automatic Multi-objective Optimization Based on Dynamic Storage Location Allocation Strategy [J]. Journal of System Simulation, 2025, 37(6): 1435-1448. |
| [6] | Wu Zisong, Chang Daofang, Gai Yuchun. Optimization of Cargo Location Allocation in Four-way Shuttle Warehousing System Based on Two-stage Hybrid Algorithm [J]. Journal of System Simulation, 2025, 37(5): 1234-1245. |
| [7] | Huang Shijie, Zhang Zhensheng, Cai Jing, Zhang Rui. Research on Modeling, Optimization and Application of Aeroengine Oil System [J]. Journal of System Simulation, 2025, 37(5): 1266-1279. |
| [8] | Shi Xiaodong, Guo Yongcheng, Ma Mingqi, Pan Jiarui. Optimization of Vehicle Routing for Cross-infection Risk in the Epidemic [J]. Journal of System Simulation, 2025, 37(4): 910-921. |
| [9] | Xu Qiang, Xu Jianlei, Hu Yanhai, Chen Haihui, Zhang Xing, Xing Zhaohui. Trajectory Optimization of Robotic Arm Based on Improved Simulated Annealing Genetic Algorithm [J]. Journal of System Simulation, 2025, 37(2): 404-412. |
| [10] | Xu Zhixia, Wang Rui, Sun Nan, He Bing, Shen Xiaowei, Zhu Xiaofei. Research on Cooperative Interference Allocation of Jamming Resources Based on Improved Genetic Algorithm [J]. Journal of System Simulation, 2025, 37(12): 3176-3189. |
| [11] | Ma Zhenpeng, Jiao Hanyang, Zhang Zhe, Liu Cheng, Jiang Bo, Wang Lin. Research on Vehicle Path Optimization Algorithms for Urban Logistics and Distribution [J]. Journal of System Simulation, 2025, 37(11): 2768-2777. |
| [12] | Ding Xinhuan, Wang Huaqing, Dang Xu. Multi-objective Optimization of Signal Timing at Intersections Considering Tailpipe Emissions [J]. Journal of System Simulation, 2025, 37(10): 2687-2700. |
| [13] | Ma Huawei, Yan Boying. Vehicle Routing Problem with Drones Considering Zoned Distribution of Epidemic Prevention Materials [J]. Journal of System Simulation, 2025, 37(1): 234-244. |
| [14] | Deng Mingjun, Hu Xinxia, Li Xiang, Xu Liping. Arterial Coordination Optimization Method Based on Vehicle Speed Guidance and Inductive Control [J]. Journal of System Simulation, 2024, 36(6): 1309-1321. |
| [15] | Xiao Peng, Xie Feng, Ni Haihong, Zhang Min, Tang Zhili, Li Ni. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning [J]. Journal of System Simulation, 2024, 36(5): 1141-1151. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
