| 1 |
Stern Roni, Sturtevant N, Felner Ariel, et al. Multi-agent Pathfinding: Definitions, Variants, and Benchmarks[C]//Proceedings of the Twelfth International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2019: 151-158.
|
| 2 |
Sun Yifei, Zhang Zikai, Li Yidong, et al. Joint Optimization of Path Planning and Task Assignment for Space Robot[C]//2021 12th International Symposium on Parallel Architectures, Algorithms and Programming (PAAP). Piscataway: IEEE, 2021: 47-51.
|
| 3 |
毛建旭, 贺振宇, 王耀南, 等. 电力巡检机器人路径规划技术及应用综述[J]. 控制与决策, 2023, 38(11): 3009-3024.
|
|
Mao Jianxu, He Zhenyu, Wang Yaonan, et al. Review of Research and Applications on Path Planning Technology for Power Inspection Robots[J]. Control and Decision, 2023, 38(11): 3009-3024.
|
| 4 |
Kumar V, Sahin F. Cognitive Maps in Swarm Robots for the Mine Detection Application[C]//SMC'03 Conference Proceedings. 2003 IEEE International Conference on Systems, Man and Cybernetics. Conference Theme - System Security and Assurance. Piscataway: IEEE, 2003: 3364-3369.
|
| 5 |
Dai Loulei, Wang Hongguo, Pan Quanke. An Effective Multi-objective Evolutionary Algorithm Based on Decomposition for a Robot Rescue Path Planning Problem[C]//2022 41st Chinese Control Conference (CCC). Piscataway: IEEE, 2022: 2065-2070.
|
| 6 |
Wang Chen, Mao Jian. Summary of AGV Path Planning[C]//2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE). Piscataway: IEEE, 2019: 332-335.
|
| 7 |
Ma Hang, Hönig Wolfgang, Kumar T K S, et al. Lifelong Path Planning with Kinematic Constraints for Multi-agent Pickup and Delivery[C]//Proceedings of the Thirty-Third AAAI Conference on Artificial Intelligence and Thirty-First Innovative Applications of Artificial Intelligence Conference and Ninth AAAI Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2019: 7651-7658.
|
| 8 |
Zhang Jing, He You, Peng Yingning, et al. Cooperative Path Planning for Adversarial Target Based on Neural Network and Artificial Potential Field[C]//2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC). Piscataway: IEEE, 2018: 1-5.
|
| 9 |
Lu Yafei, Wu Anping, Chen Qingyang, et al. An Improved UAV Path Planning Method Based on RRT-APF Hybrid Strategy[C]//2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE). Piscataway: IEEE, 2020: 81-86.
|
| 10 |
Zhao Dewei, Zhang Sheng, Shao Faming, et al. Path Planning for the Rapid Reconfiguration of a Multi-robot Formation Using an Integrated Algorithm[J]. Electronics, 2023, 12(16): 3483.
|
| 11 |
Tai Lei, Paolo Giuseppe, Liu Ming. Virtual-to-real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2017: 31-36.
|
| 12 |
张凯翔, 毛剑琳, 向凤红, 等. 基于讨价还价博弈机制的B-IHCA*多机器人路径规划算法[J]. 自动化学报, 2023, 49(7): 1483-1497.
|
|
Zhang Kaixiang, Mao Jianlin, Xiang Fenghong, et al. B-IHCA*, a Bargaining Game Based Multi-agent Path Finding Algorithm[J]. Acta Automatica Sinica, 2023, 49(7): 1483-1497.
|
| 13 |
宣志玮, 毛剑琳, 张凯翔. CBS框架下面向复杂地图的低拓展度A*算法[J]. 电子学报, 2022, 50(8): 1943-1950.
|
|
Xuan Zhiwei, Mao Jianlin, Zhang Kaixiang. Low-expansion A* Algorithm Based on CBS Framework for Complex Map[J]. Acta Electronica Sinica, 2022, 50(8): 1943-1950.
|
| 14 |
Sharon Guni, Stern Roni, Felner Ariel, et al. Conflict-based Search for Optimal Multi-agent Pathfinding[J]. Artificial Intelligence, 2015, 219: 40-66.
|
| 15 |
Phillips M, Likhachev M. SIPP: Safe Interval Path Planning for Dynamic Environments[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 5628-5635.
|
| 16 |
Carlos Hernández Ulloa, Yeoh W, Baier Jorge A, et al. A Simple and Fast Bi-objective Search Algorithm[C]//Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 143-151.
|
| 17 |
Okumura Keisuke, Tixeuil Sébastien. Fault-tolerant Offline Multi-agent Path Planning[C]//Proceedings of the Thirty-Seventh AAAI Conference on Artificial Intelligence and Thirty-Fifth Conference on Innovative Applications of Artificial Intelligence and Thirteenth Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2023: 11647-11654.
|
| 18 |
Atzmon Dor, Stern Roni, Felner Ariel, et al. Robust Multi-agent Path Finding[C]//Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems. Palo Alto: AAAI Press, 2018: 1862-1864.
|
| 19 |
Yakovlev Konstantin, Andreychuk Anton, Stern Roni. Revisiting Bounded-suboptimal Safe Interval Path Planning[C]//Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 300-304.
|
| 20 |
Silver D. Cooperative Pathfinding[C]//Proceedings of the First Artificial Intelligence and Interactive Digital Entertainment Conference. Palo Alto: AAAI Press, 2021: 117-122.
|
| 21 |
Mandow Lawrence, José Luis Pérez De La Cruz. Multiobjective A* Search with Consistent Heuristics[J]. Journal of the ACM, 2008, 57(5): 27.
|
| 22 |
Khorshid M, Holte R, Sturtevant N. A Polynomial-time Algorithm for Non-optimal Multi-agent Pathfinding[C]//Proceedings of the Fourth Annual Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2011: 76-83.
|
| 23 |
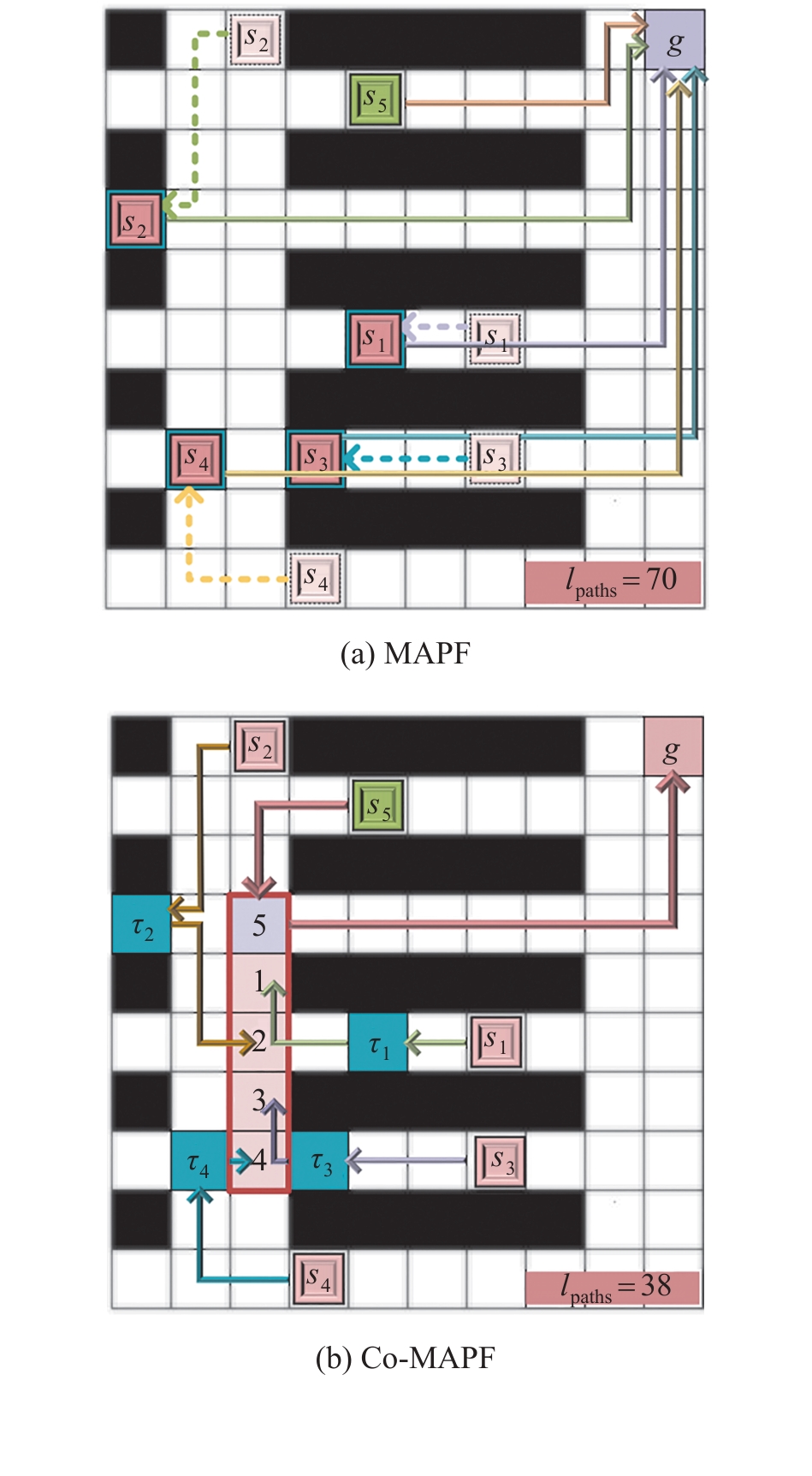
Greshler Nir, Gordon Ofir, Salzman Oren, et al. Cooperative Multi-agent Path Finding: Beyond Path Planning and Collision Avoidance[C]//2021 International Symposium on Multi-Robot and Multi-Agent Systems (MRS). Piscataway: IEEE, 2021: 20-28.
|