| 1 |
Wu Lei, Huang Xiaodong, Cui Junguo, et al. Modified Adaptive Ant Colony Optimization Algorithm and Its Application for Solving Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2023, 215: 119410.
|
| 2 |
Fragapane Giuseppe, René de Koster, Sgarbossa Fabio, et al. Planning and Control of Autonomous Mobile Robots for Intralogistics: Literature Review and Research Agenda[J]. European Journal of Operational Research, 2021, 294(2): 405-426.
|
| 3 |
张瑞, 周丽, 刘正洋. 融合RRT*与DWA算法的移动机器人动态路径规划[J]. 系统仿真学报, 2024, 36(4): 957-968.
|
|
Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach[J]. Journal of System Simulation, 2024, 36(4): 957-968.
|
| 4 |
Jeddisaravi Kossar, Reza Javanmard Alitappeh, C A Pimenta Luciano, et al. Multi-objective Approach for Robot Motion Planning in Search Tasks[J]. Applied Intelligence, 2016, 45(2): 305-321.
|
| 5 |
Luo Qiang, Wang Haibao, Zheng Yan, et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Neural Computing and Applications, 2020, 32(6): 1555-1566.
|
| 6 |
Wang Qi, Tang Chunlei. Deep Reinforcement Learning for Transportation Network Combinatorial Optimization: A Survey[J]. Knowledge-Based Systems, 2021, 233: 107526.
|
| 7 |
Qu Rong, Xu Ying, Castro J P, et al. Particle Swarm Optimization for the Steiner Tree in Graph and Delay-constrained Multicast Routing Problems[J]. Journal of Heuristics, 2013, 19(2): 317-342.
|
| 8 |
Huynh Thi Thanh Binh, Pham Dinh Thanh, Ta Bao Thang. New Approach to Solving the Clustered Shortest-path Tree Problem Based on Reducing the Search Space of Evolutionary Algorithm[J]. Knowledge-Based Systems, 2019, 180: 12-25.
|
| 9 |
Tang Gang, Tang Congqiang, Claramunt Christophe, et al. Geometric A-star Algorithm: An Improved A-star Algorithm for AGV Path Planning in a Port Environment[J]. IEEE Access, 2021, 9: 59196-59210.
|
| 10 |
Zhao Tao, Li Haodong, Songyi Dian. Multi-robot Path Planning Based on Improved Artificial Potential Field and Fuzzy Inference System[J]. Journal of Intelligent & Fuzzy Systems, 2020, 39(5): 7621-7637.
|
| 11 |
Li Changgeng, Huang Xia, Ding Jun, et al. Global Path Planning Based on a Bidirectional Alternating Search A* Algorithm for Mobile Robots[J]. Computers & Industrial Engineering, 2022, 168: 108123.
|
| 12 |
赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910.
|
|
Zhao Xiao, Wang Zheng, Huang Chengkan, et al. Mobile Robot Path Planning Based on an Improved A* Algorithm[J]. Robot, 2018, 40(6): 903-910.
|
| 13 |
Shang Erke, Dai Bin, Nie Yiming, et al. An Improved A-star Based Path Planning Algorithm for Autonomous Land Vehicles[J]. International Journal of Advanced Robotic Systems, 2020, 17(5): 1729881420962263.
|
| 14 |
Liu Haoxin, Zhang Yonghui. ASL-DWA: An Improved A-star Algorithm for Indoor Cleaning Robots[J]. IEEE Access, 2022, 10: 99498-99515.
|
| 15 |
辛煜, 梁华为, 杜明博, 等. 一种可搜索无限个邻域的改进A*算法[J]. 机器人, 2014, 36(5): 627-633.
|
|
Xin Yu, Liang Huawei, Du Mingbo, et al. An Improved A* Algorithm for Searching Infinite Neighbourhoods[J]. Robot, 2014, 36(5): 627-633.
|
| 16 |
Xie Lei, Xue Shuangfei, Zhang Jinfen, et al. A Path Planning Approach Based on Multi-direction A* Algorithm for Ships Navigating Within Wind Farm Waters[J]. Ocean Engineering, 2019, 184: 311-322.
|
| 17 |
陈娇, 徐菱, 陈佳, 等. 改进A*和动态窗口法的移动机器人路径规划[J]. 计算机集成制造系统, 2022, 28(6): 1650-1658.
|
|
Chen Jiao, Xu Ling, Chen Jia, et al. Path Planning Based on Improved A* and Dynamic Window Approach for Mobile Robot[J]. Computer Integrated Manufacturing Systems, 2022, 28(6): 1650-1658.
|
| 18 |
封声飞, 雷琦, 吴文烈, 等. 自适应蚁群算法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(17): 35-43.
|
|
Feng Shengfei, Lei Qi, Wu Wenlie, et al. Mobile Robot Path Planning Based on Adaptive Ant Colony Algorithm[J]. Computer Engineering and Applications, 2019, 55(17): 35-43.
|
| 19 |
徐菱, 付文浩, 江文辉, 等. 基于16方向24邻域改进蚁群算法的移动机器人路径规划[J]. 控制与决策, 2021, 36(5): 1137-1146.
|
|
Xu Ling, Fu Wenhao, Jiang Wenhui, et al. Mobile Robots Path Planning Based on 16-directions 24-neighborhoods Improved Ant Colony Algorithm[J]. Robot, 2021, 36(5): 1137-1146.
|
| 20 |
王中玉, 曾国辉, 黄勃, 等. 改进A*算法的机器人全局最优路径规划[J]. 计算机应用, 2019, 39(9): 2517-2522.
|
|
Wang Zhongyu, Zeng Guohui, Huang Bo, et al. Global Optimal Path Planning for Robots with Improved A* Algorithm[J]. journal of Computer Applications, 2019, 39(9): 2517-2522.
|
| 21 |
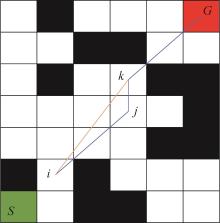
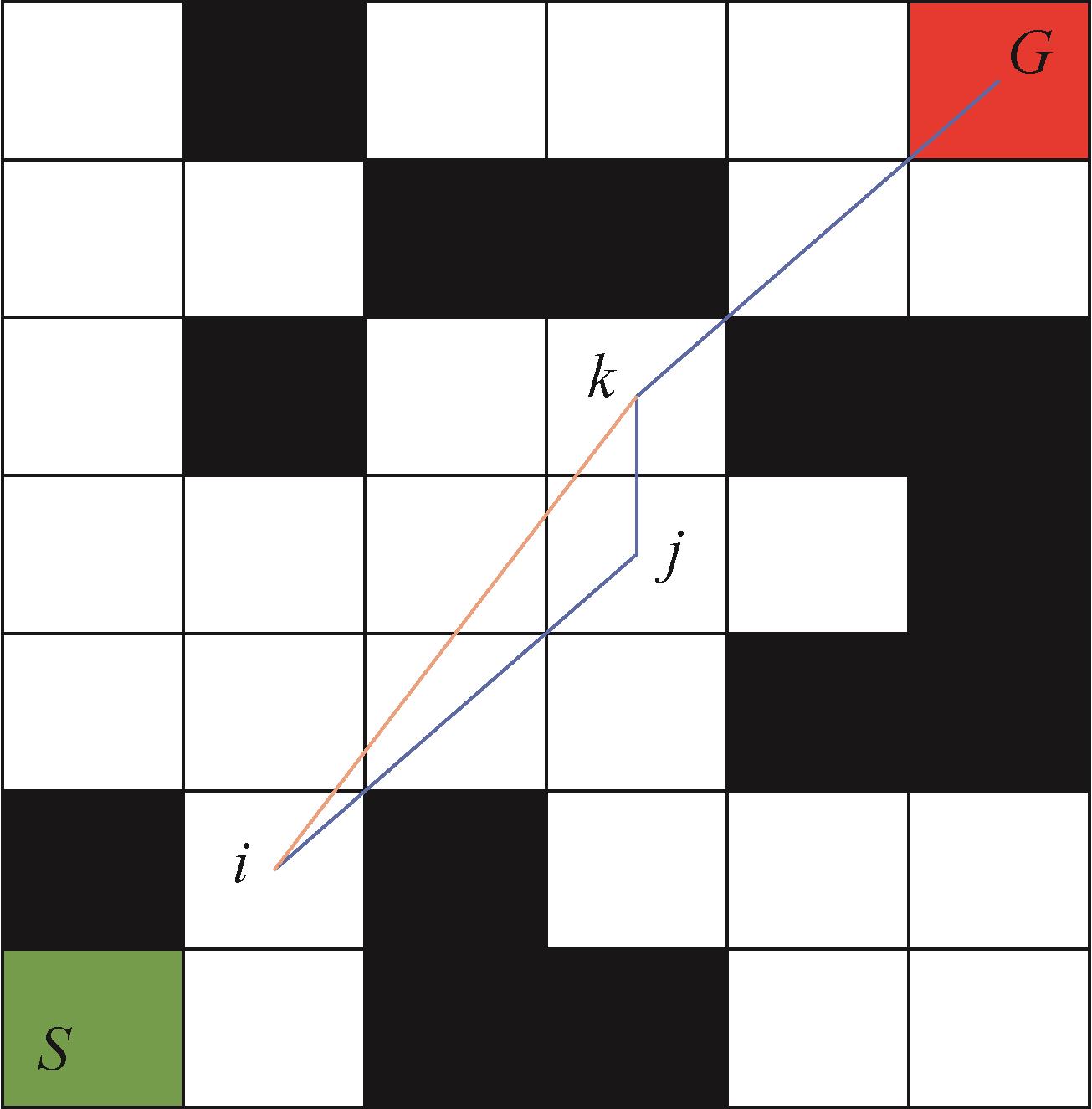
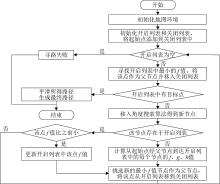
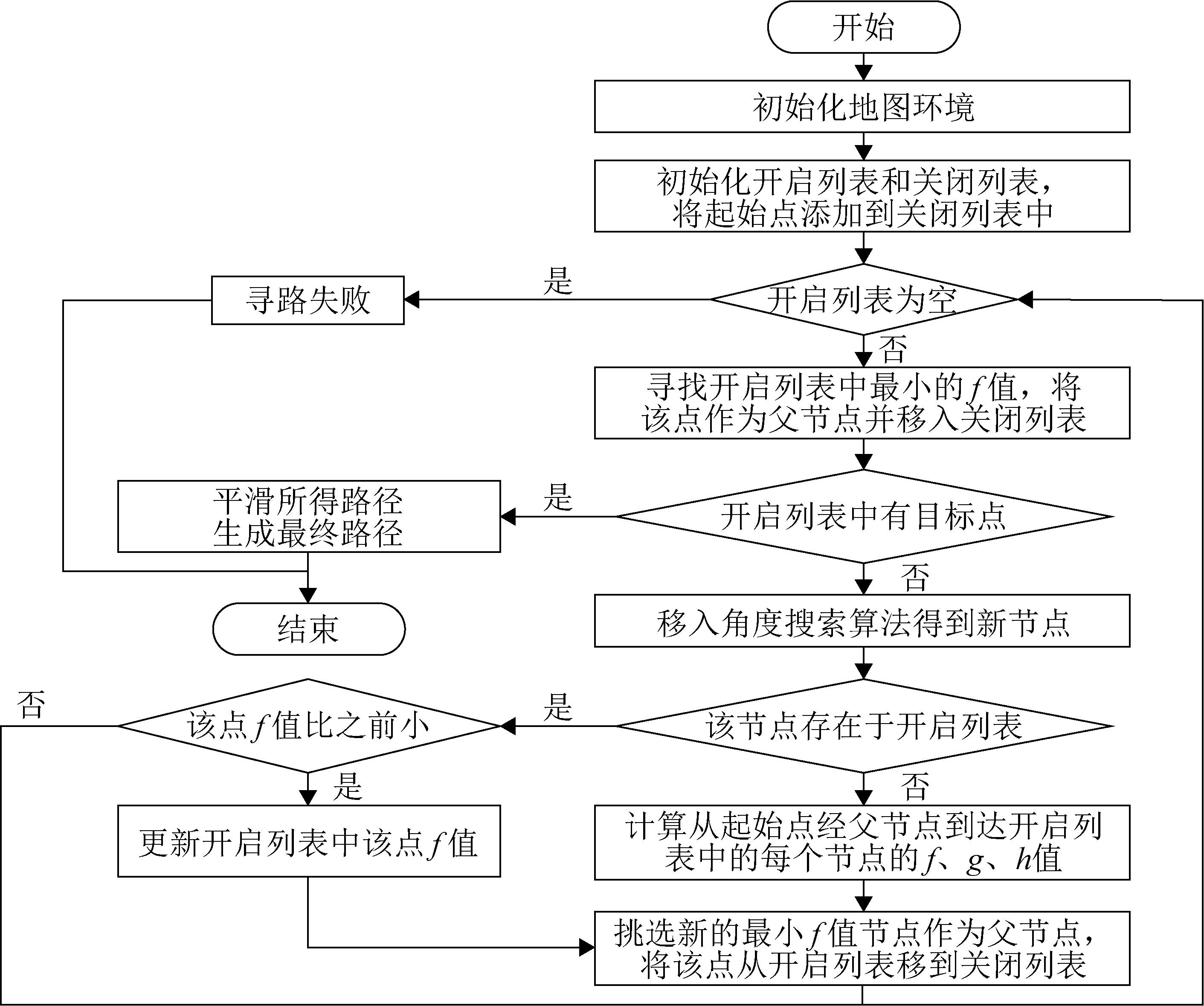
王雅如, 姚得鑫, 刘增力, 等. 基于角度搜索的移动机器人路径规划方法[J]. 系统仿真学报, 2024, 36(7): 1643-1654.
|
|
Wang Yaru, Yao Dexin, Liu Zengli, et al. Path Planning for Mobile Robot Based on Angle Search[J]. Journal of System Simulation, 2024, 36(7): 1643-1654.
|