

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (5): 1290-1302.doi: 10.16182/j.issn1004731x.joss.25-0502
Previous Articles Next Articles
Shi Min1, Guo Shisheng1, Wang Suqin1, Li Zhaoxin2,3, Zhu Dengming4,5
Received:2025-06-03
Revised:2025-08-11
Online:2026-05-21
Published:2026-05-29
Contact:
Wang Suqin
CLC Number:
Shi Min, Guo Shisheng, Wang Suqin, Li Zhaoxin, Zhu Dengming. Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors[J]. Journal of System Simulation, 2026, 38(5): 1290-1302.

Fig. 1
Structure of AGP-Grasp method
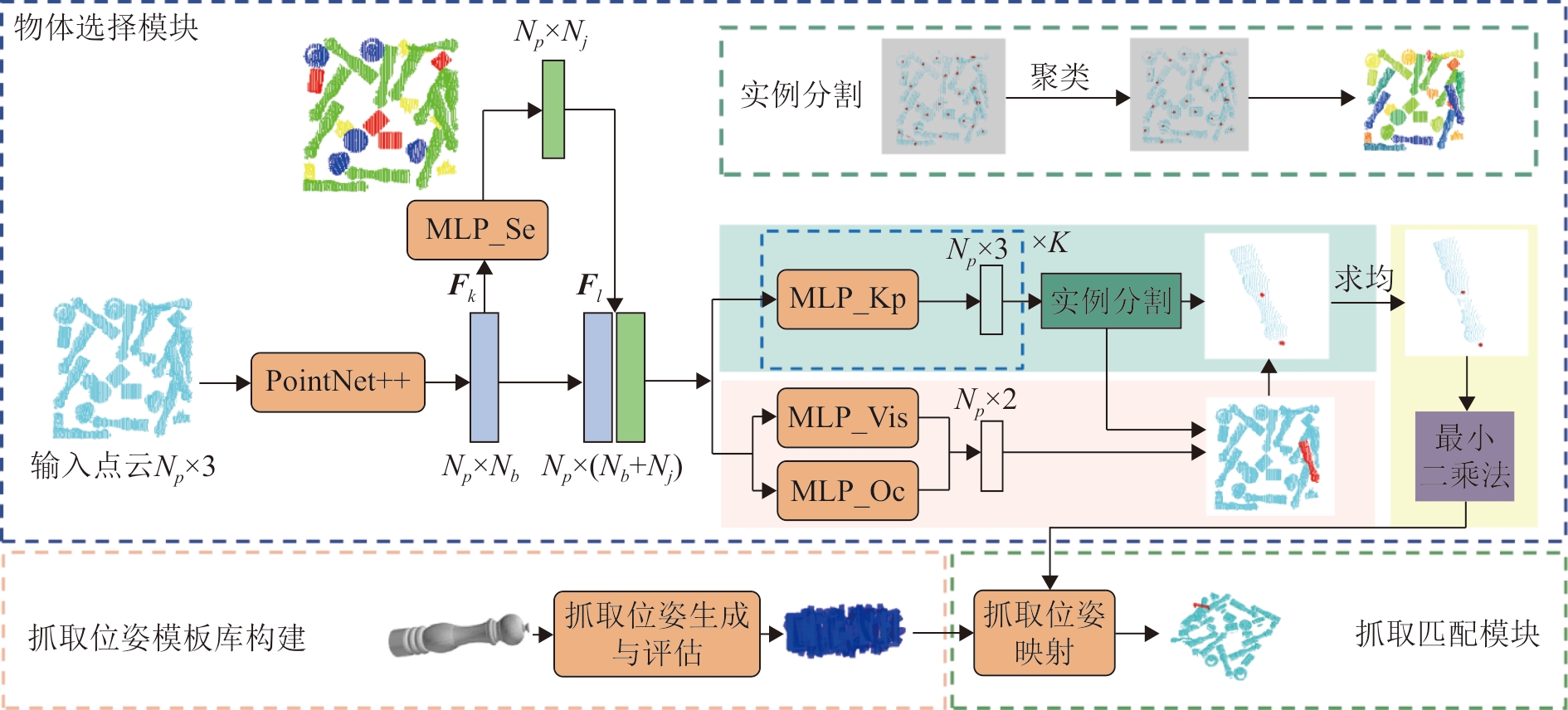

Fig. 2
Force-closure effect diagram
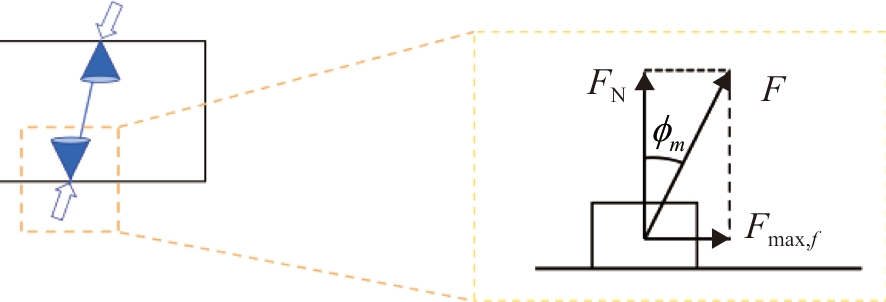
Fig. 3
Gripper model diagram
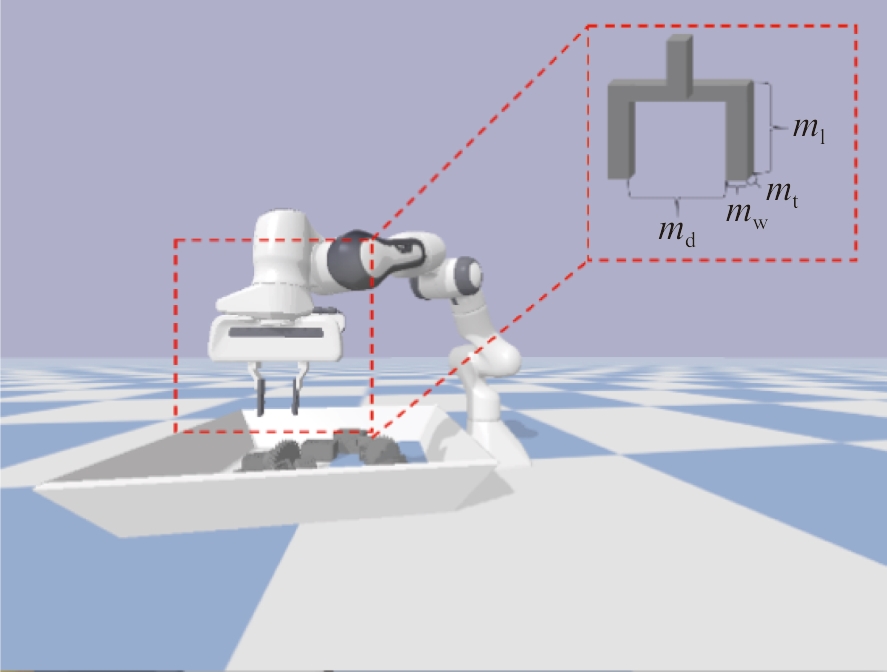

Fig. 4
Flowchart of grasp template library construction
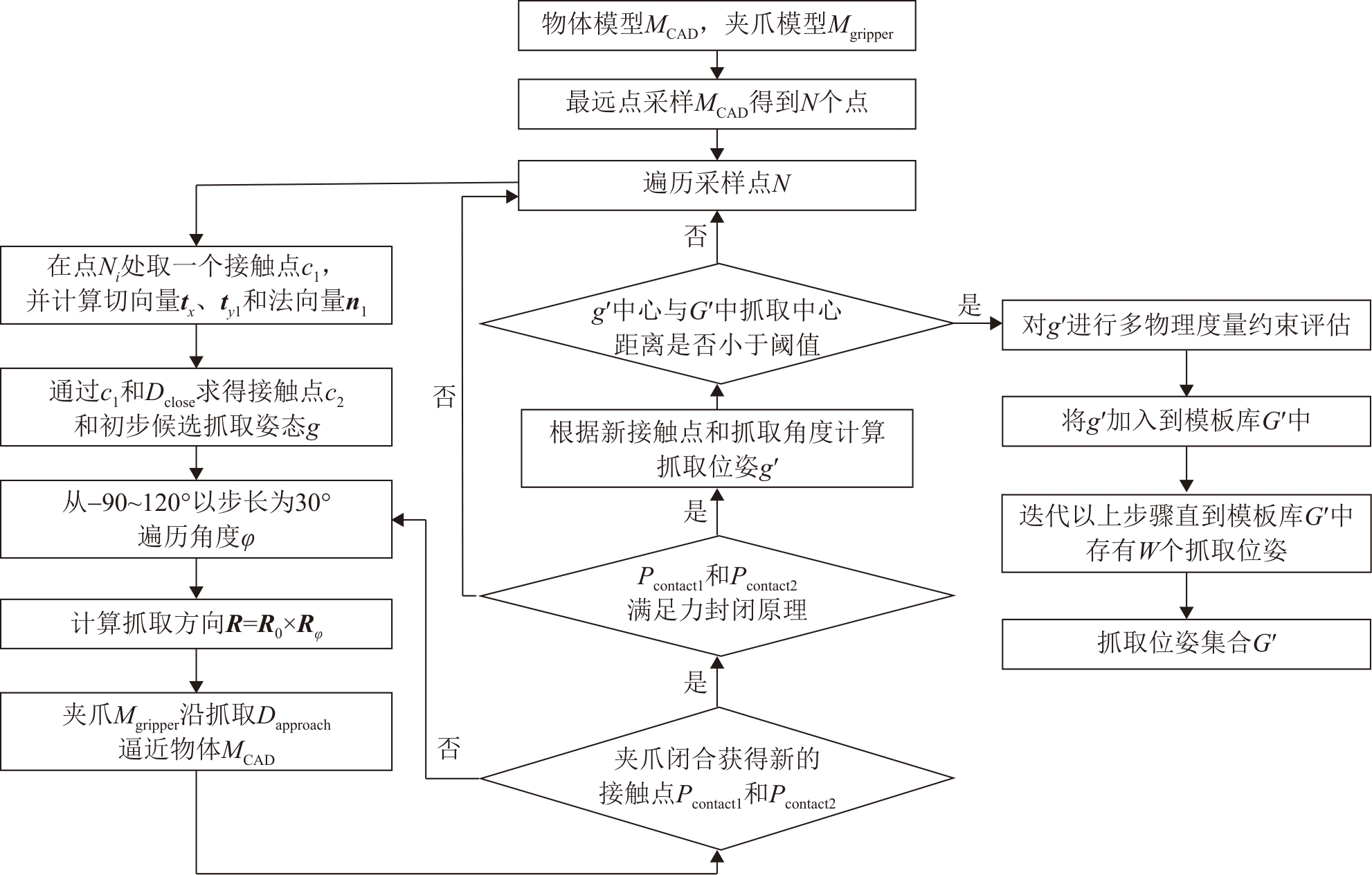
Fig. 5
Schematic diagram of stacked objects
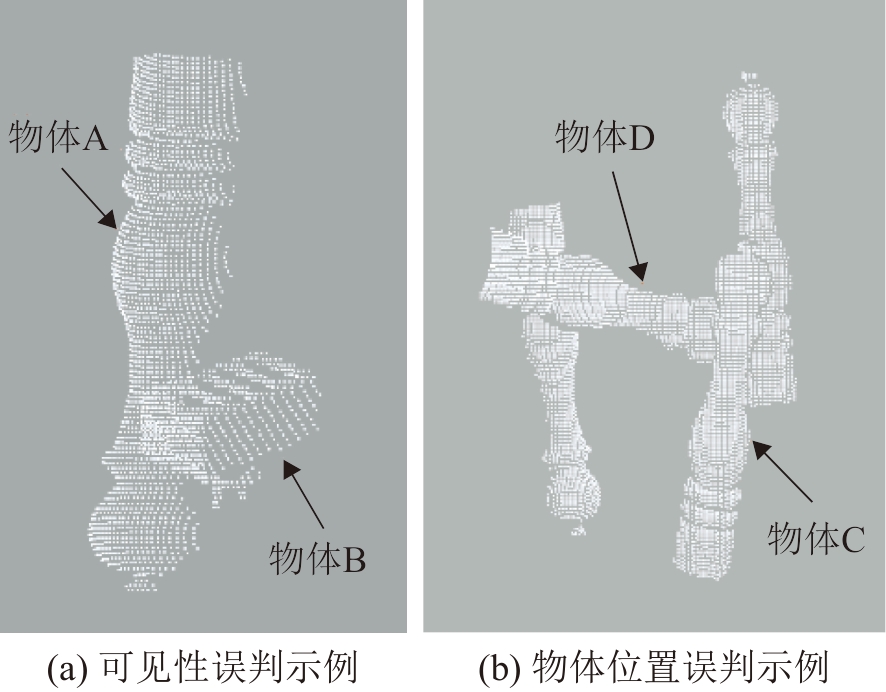

Fig. 6
Overall framework of geometric guidance and multi-task learning
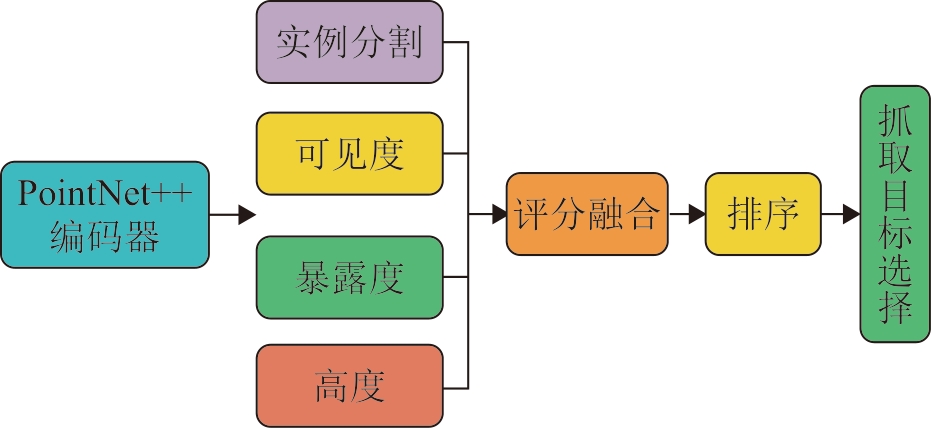

Fig. 7
Schematic diagram of dataset and experimental scene
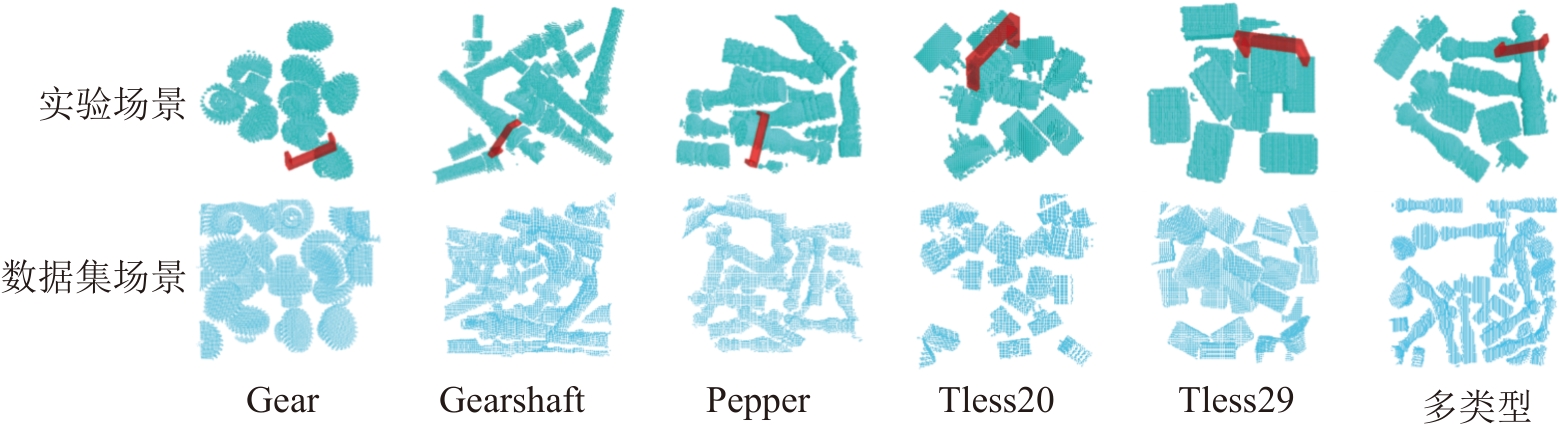

Fig. 8
Experimental simulation platform
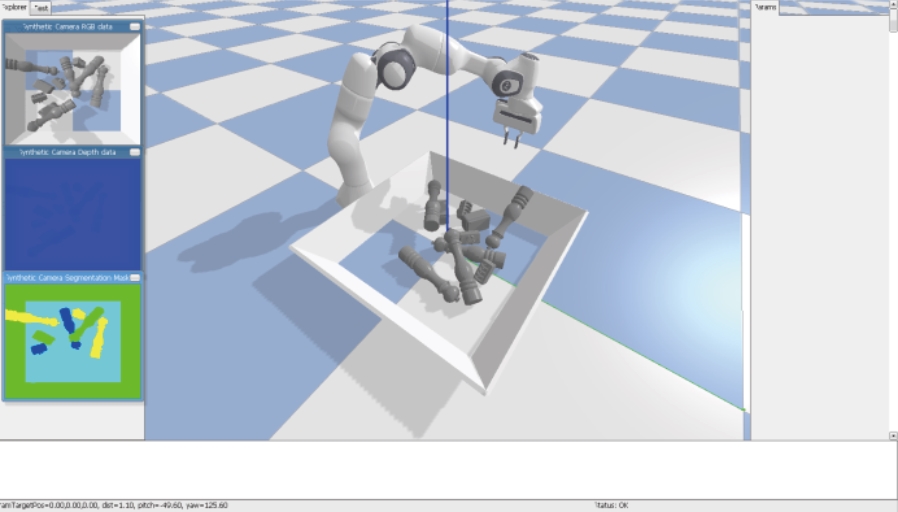
Table 1
Comparison of grasp success rates in single-type scenes
| 方法 | Pepper | Tless20 | Tless29 | Gear | GearsSaft |
|---|---|---|---|---|---|
| PointNetGPD | 84 | 75 | 74 | 80 | 82 |
| NG-Net | 98 | 80 | 96 | 93 | 97 |
| No-Label[ | 99 | 91 | 94 | 98 | 98 |
| 本文算法 | 99 | 98 | 99 | 99 | 99 |
Table 2
Comparison of grasp success rates in multi-type scenes
| 方法 | Pepper | Tless20 | Tless29 | Gear |
|---|---|---|---|---|
| PointNetGPD | 72 | 64 | 52 | 56 |
| NG-Net | 92 | 80 | 96 | 88 |
| No-Label | 80 | 76 | 88 | 82 |
| 本文算法 | 98 | 96 | 98 | 98 |
Table 3
Comparison of grasp time in two types of scenes
| 方法 | 单类型场景下 | 多类型场景下 | ||||
|---|---|---|---|---|---|---|
| Pepper | Tless20 | Tless29 | Gear | Gearshaft | ||
| PointNetGPD | 3.381 | 4.862 | 4.415 | 4.363 | 3.553 | 9.080 |
| No-Label | 1.083 | 1.407 | 1.435 | 3.655 | 1.222 | 3.516 |
| 本文算法 | 1.071 | 1.464 | 1.481 | 3.653 | 0.951 | 3.371 |
Table 4
Comparison of template matching time in two types of scenes
| 抓取模板数量 | 单类型场景下 | 多类型场景下 | ||||
|---|---|---|---|---|---|---|
| Pepper | Tless20 | Tless29 | Gear | Gearshaft | ||
| 180 | 0.123 5 | 0.127 2 | 0.215 5 | 0.141 5 | 0.146 6 | 0.171 3 |
| 200 | 0.158 2 | 0.137 3 | 0.237 0 | 0.167 0 | 0.158 6 | 0.189 9 |
| 220 | 0.162 6 | 0.156 6 | 0.258 5 | 0.179 9 | 0.193 5 | 0.211 4 |
Table 5
Comparison of keypoint-based ablation experiment results
| 场景 | 方法 | Pepper | Tless20 | Tless29 | Gear | Gearshaft |
|---|---|---|---|---|---|---|
| 单类型 | 基于关键点 | 99 | 98 | 99 | 99 | 99 |
| 直接回归 | 96 | 95 | 94 | 97 | 98 | |
| 多类型 | 基于关键点 | 98 | 96 | 98 | 98 | |
| 直接回归 | 94 | 94 | 92 | 96 |
Table 6
Comparison of ablation experiment results on grasp scores
| 场景 | 方法 | Pepper | Tless20 | Tless29 | Gear |
|---|---|---|---|---|---|
| 单类型 | Baseline+得分 | 99 | 98 | 99 | 99 |
| Baseline | 99 | 93 | 96 | 99 | |
| 多类型 | Baseline+得分 | 98 | 96 | 98 | 98 |
| Baseline | 96 | 96 | 92 | 88 |
Table 7
Comparison of ablation experiment results under different numbers of templates
| 抓取模板数量 | 单类型场景下 | 多类型场景下 | ||||
|---|---|---|---|---|---|---|
| Pepper | Tless20 | Tless29 | Gear | Gearshaft | ||
| 180 | 98 | 95 | 96 | 98 | 96 | 96.0 |
| 200 | 99 | 98 | 99 | 99 | 99 | 97.5 |
| 220 | 99 | 97 | 98 | 98 | 99 | 97.0 |
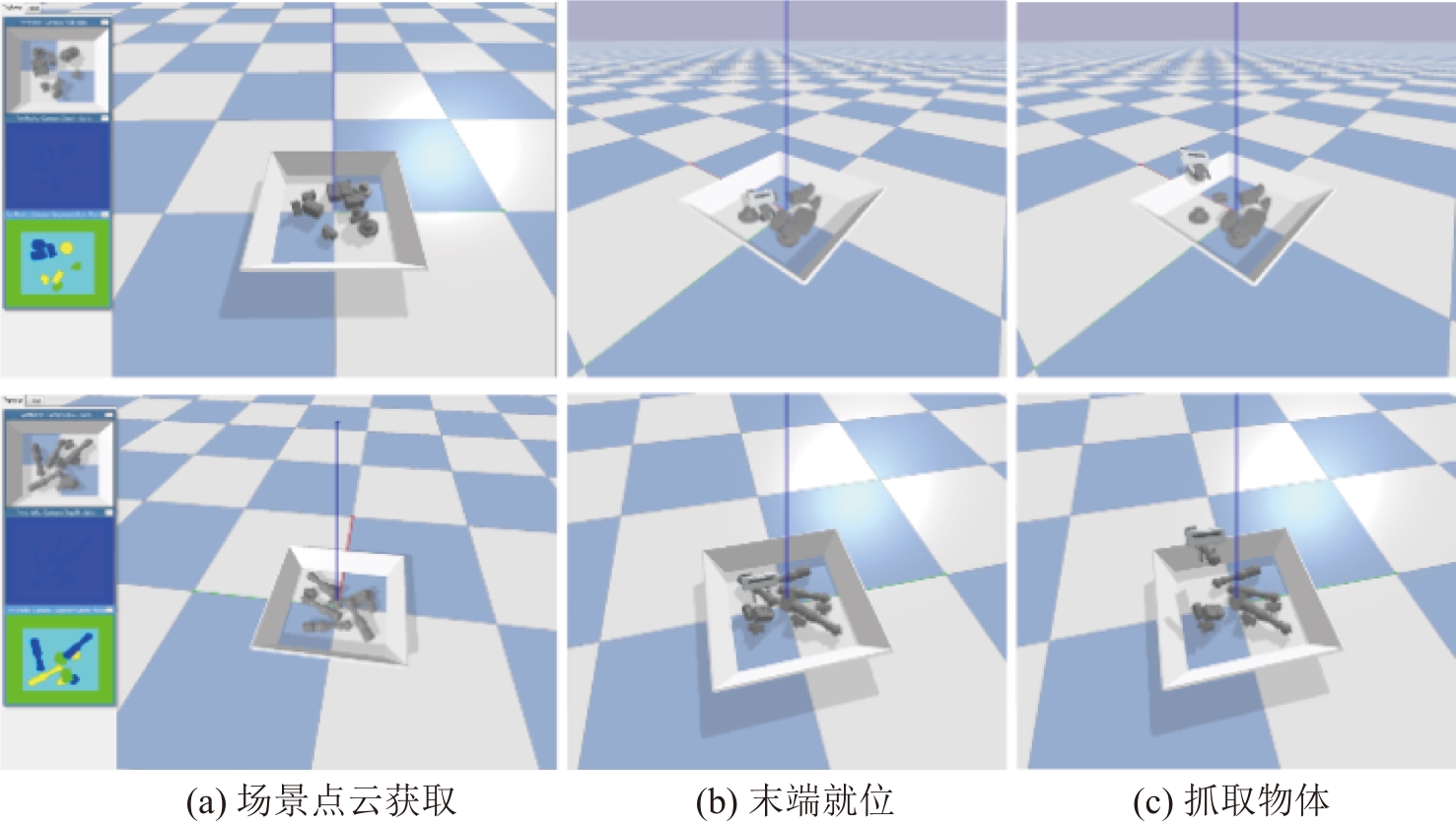
Fig. 9
Grasp process in simulation environment
| [1] | 徐健, 刘高峰, 赵一剑, 等. 装配机器人的数字孪生虚实同步及抓取方法[J]. 系统仿真学报, 2024, 36(9): 2181-2192. |
| Xu Jian, Liu Gaofeng, Zhao Yijian, et al. The Synchronous Grasping Method of Virtual-real Assembly Robot Based on Digital Twin[J]. Journal of System Simulation, 2024, 36(9): 2181-2192. | |
| [2] | Zhang Jing, Tao Dacheng. Empowering Things with Intelligence: A Survey of the Progress, Challenges, and Opportunities in Artificial Intelligence of Things[J]. IEEE Internet of Things Journal, 2021, 8(10): 7789-7817. |
| [3] | Wang Shengfan, Jiang Xin, Zhao Jie, et al. Efficient Fully Convolution Neural Network for Generating Pixel Wise Robotic Grasps with High Resolution Images[C]//2019 IEEE International Conference on Robotics and Biomimetics (ROBIO). Piscataway: IEEE, 2019: 474-480. |
| [4] | Mahler J, Liang J, Niyaz S, et al. Dex-Net 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics[EB/OL]. (2017-08-08) [2025-03-24]. . |
| [5] | Yu Sheng, Zhai Dihua, Xia Yuanqing, et al. SE-ResUNet: A Novel Robotic Grasp Detection Method[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5238-5245. |
| [6] | Morrison Douglas, Corke Peter, Leitner Jürgen. Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach[EB/OL]. (2018-05-15) [2025-02-14]. . |
| [7] | Kaynar Furkan, Rajagopalan Sudarshan, Zhou Shaobo, et al. Remote Task-oriented Grasp Area Teaching by Non-experts Through Interactive Segmentation and Few-shot Learning[EB/OL]. (2023-03-17) [2025-03-24]. . |
| [8] | Liu Jirong, Zhang Ruo, Fang Haoshu, et al. Target-referenced Reactive Grasping for Dynamic Objects[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2023: 8824-8833. |
| [9] | Fang Haoshu, Wang Chenxi, Gou Minghao, et al. GraspNet-1Billion: A Large-scale Benchmark for General Object Grasping[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020: 11441-11450. |
| [10] | Zhao Binglei, Zhang Hanbo, Lan Xuguang, et al. REGNet: REgion-based Grasp Network for End-to-end Grasp Detection in Point Clouds[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 13474-13480. |
| [11] | Ren Guangli, Geng Wenjie, Guan Peiyu, et al. Pixel-wise Grasp Detection via Twin Deconvolution and Multi-dimensional Attention[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(8): 4002-4010. |
| [12] | Liang Hongzhuo, Ma Xiaojian, Li Shuang, et al. PointNetGPD: Detecting Grasp Configurations from Point Sets[C]//2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2019: 3629-3635. |
| [13] | Qin Yuzhe, Chen Rui, Zhu Hao, et al. S4G: Amodal Single-view Single-shot SE(3) Grasp Detection in Cluttered Scenes[C]//Proceedings of the Conference on Robot Learning. Chia Laguna Resort: PMLR, 2020: 53-65. |
| [14] | Wang Chenxi, Fang Haoshu, Gou Minghao, et al. Graspness Discovery in Clutters for Fast and Accurate Grasp Detection[C]//2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021: 15944-15953. |
| [15] | 徐胜军, 崔智伟, 史亚, 等. 多尺度区域注意力堆叠物体抓取检测网络[J]. 激光与光电子学进展, 2025, 62(10): 224-235. |
| Xu Shengjun, Cui Zhiwei, Shi Ya, et al. Regional-attention Stacked-object Grasp Detection Network[J]. Laser & Optoelectronics Progress, 2025, 62(10): 224-235. | |
| [16] | Shi Min, Hou Jingzhao, Li Zhaoxin, et al. NG-net: No-grasp Annotation Grasp Detection Network for Stacked Scenes[J]. Journal of Intelligent Manufacturing, 2025, 36(2): 1477-1490. |
| [17] | 石敏, 侯京召, 朱登明, 等. 无抓取标注的堆叠物体抓取位姿检测方法[J]. 计算机辅助设计与图形学学报, 2025, 37(9): 1632-1642. |
| Shi Min, Hou Jingzhao, Zhu Dengming, et al. No-label Stacked Object Grasp Pose Detection Algorithm[J]. Journal of Computer-Aided Design & Computer Graphics, 2025, 37(9): 1632-1642. | |
| [18] | Huang Dingtao, Lin Ente, Chen Lipeng, et al. SD-net: Symmetric-aware Keypoint Prediction and Domain Adaptation for 6D Pose Estimation in Bin-picking Scenarios[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2024: 2747-2754. |
| [19] | Dong Zhikai, Liu Sicheng, Zhou Tao, et al. PPR-net: Point-wise Pose Regression Network for Instance Segmentation and 6D Pose Estimation in Bin-picking Scenarios[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2019: 1773-1780. |
| [20] | Zeng Long, Weijie Lü, Dong Zhikai, et al. PPR-Net++: Accurate 6-D Pose Estimation in Stacked Scenarios[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 3139-3151. |
| [21] | Kleeberger Kilian, Landgraf Christian, Huber Marco F. Large-scale 6D Object Pose Estimation Dataset for Industrial Bin-picking[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2019: 2573-2578. |
| [22] | 楚红雨, 冷齐齐, 张晓强, 等. 融入注意力机制的多模特征机械臂抓取位姿检测[J]. 控制与决策, 2024, 39(3): 777-785. |
| Chu Hongyu, Leng Qiqi, Zhang Xiaoqiang, et al. Multi-modal Feature Robotic Arm Grasping Pose Detection with Attention Mechanism[J]. Control and Decision, 2024, 39(3): 777-785. |
| [1] | Dong Zhiming, Hu Zhongqi, Dai Haoran, Gao Jiancheng. An Automated Generation Method for Combat Simulation Scenarios Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1129-1145. |
| [2] | Li Xiaonan, Chao Tao, Ma Ping, Yang Ming, Wang Yuxuan. Robust Identification of Black-box Nonlinear SSM Using Expectation-maximization [J]. Journal of System Simulation, 2026, 38(5): 1146-1158. |
| [3] | Liu Yingang, Ma Ming, Zhang Ronghua. Dynamic Task Planning for Wargaming Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1187-1204. |
| [4] | Su Hongjia, Zhang Cheng, Liu Fei. SoS Effectiveness Evaluation Method Based on Fuzzy Functional Dependency Network Analysis [J]. Journal of System Simulation, 2026, 38(5): 1224-1238. |
| [5] | Mei Huawei, Yang Penghui, Yu Yang. Ultra-short-term Photovoltaic Power Prediction Based on Improved PatchTST Considering Data Drift [J]. Journal of System Simulation, 2026, 38(5): 1239-1254. |
| [6] | Li Quan, Su Peng, Wan Haiying, Zhang Chengxi, He Zhijian, Ni Yiyang, Zhao Zhonggai, Liu Fei. Modeling of Penicillin Fermentation Process Based on a Multi-stage LHS-EPRCC Method [J]. Journal of System Simulation, 2026, 38(5): 1255-1276. |
| [7] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [8] | Jiang Yanji, Xiao Xingyi, Dong Hao, Yu Miao, Huang Jinshan, Liu Daqian, Fei Bowen. Detection Method for 3D Lanes Based on Graph Relationship Optimization Integrating Point and Lane Features [J]. Journal of System Simulation, 2026, 38(5): 1303-1319. |
| [9] | Zhang Xin, Zhang Ping, Zhang Chen, Liu Wei, Han Boyang. Research on Calculation Model of Excavation Resistance Under Heterogeneous Soil Conditions [J]. Journal of System Simulation, 2026, 38(5): 1320-1332. |
| [10] | Wang Wei, Liu Dong, Cui Xinhao, Li Bo, Xiao Yiyong, Ren Yi. Multi-level Digital Model of Dynamic Earned Value Management for Complex Engineering Projects and Its Applications [J]. Journal of System Simulation, 2026, 38(5): 1350-1364. |
| [11] | Peng Lijun, Su Tingqi, Liu Peijin, He Lin, Zhou Xiewu, Zhang Minxin. Detection Method for Laboratory PPE Compliance Wearing Based on Human Key Points [J]. Journal of System Simulation, 2026, 38(5): 1365-1382. |
| [12] | Teng Jing, Tong Wencong, Zhang Zhongjie, Yao Xing, Li Junxian. Automatic Speed Guidance Method and Simulation Evaluation for Trams at Intersections [J]. Journal of System Simulation, 2026, 38(5): 1426-1439. |
| [13] | Jiang Shengchao, Pei Yunqing, Zhai Hongying, Wu Guojian, Gao Fang. Power Flow Calculation Based on Block-encoded Adiabatic Quantum Newton-Raphson Method [J]. Journal of System Simulation, 2026, 38(5): 1453-1465. |
| [14] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [15] | Nan Yandong, Zhu Jinda, Lu Xinbin, Qin Zhiying, Qi Dandan, Ding Zhiheng. State Monitoring of Nuclear Power Connection Sleeve Quality Inspection Equipment Driven by Digital Twin [J]. Journal of System Simulation, 2026, 38(4): 1004-1017. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
