

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (5): 1303-1319.doi: 10.16182/j.issn1004731x.joss.25-0591
Previous Articles Next Articles
Jiang Yanji1,2, Xiao Xingyi1,2, Dong Hao2,3,4, Yu Miao5, Huang Jinshan6, Liu Daqian1, Fei Bowen1
Received:2025-06-24
Revised:2025-11-11
Online:2026-05-21
Published:2026-05-29
Contact:
Dong Hao
CLC Number:
Jiang Yanji, Xiao Xingyi, Dong Hao, Yu Miao, Huang Jinshan, Liu Daqian, Fei Bowen. Detection Method for 3D Lanes Based on Graph Relationship Optimization Integrating Point and Lane Features[J]. Journal of System Simulation, 2026, 38(5): 1303-1319.
Fig. 1
Model framework
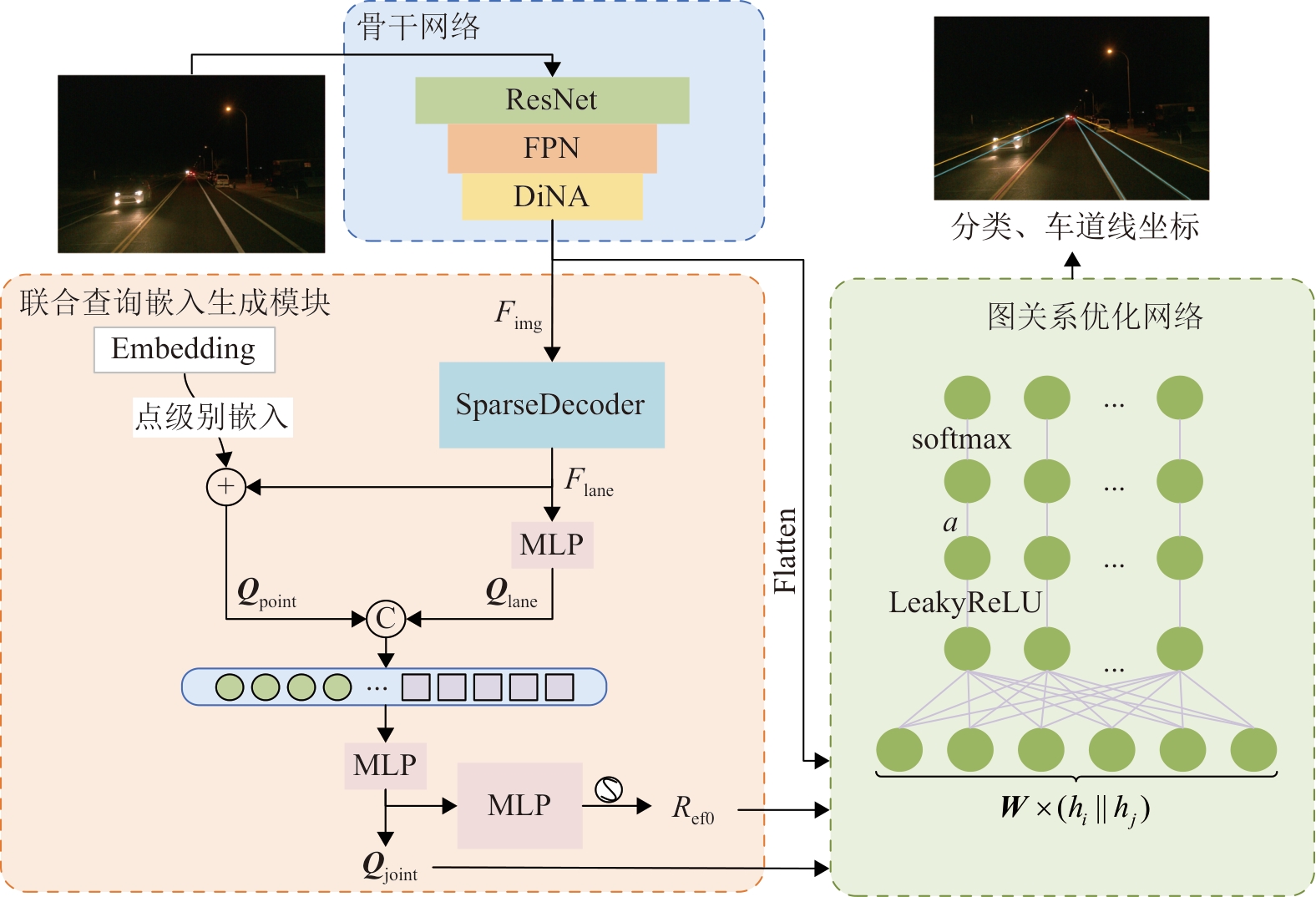

Fig. 2
Graph relationship optimization network
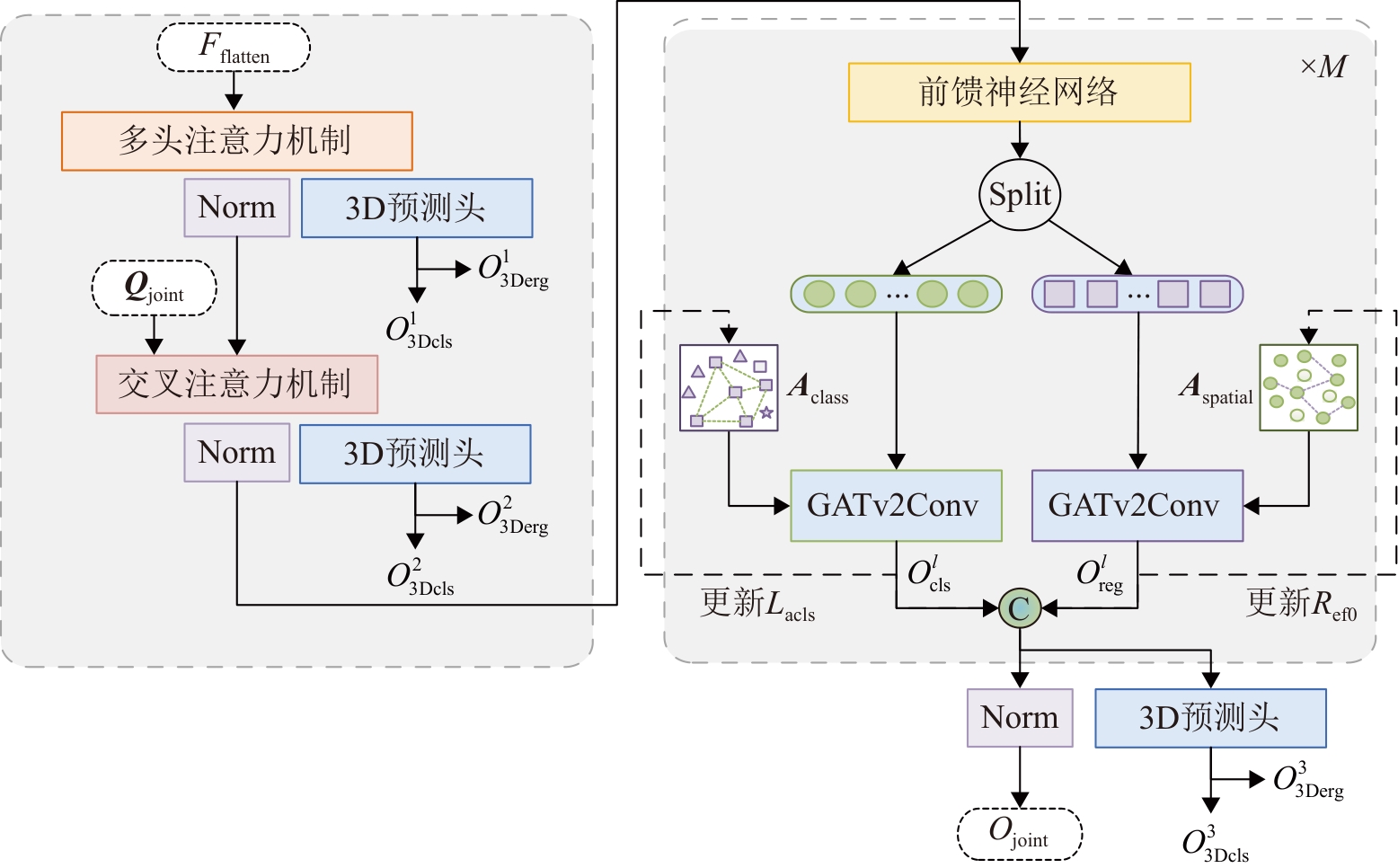
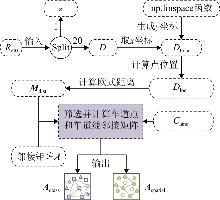
Fig. 3
Graph relationship calculation network
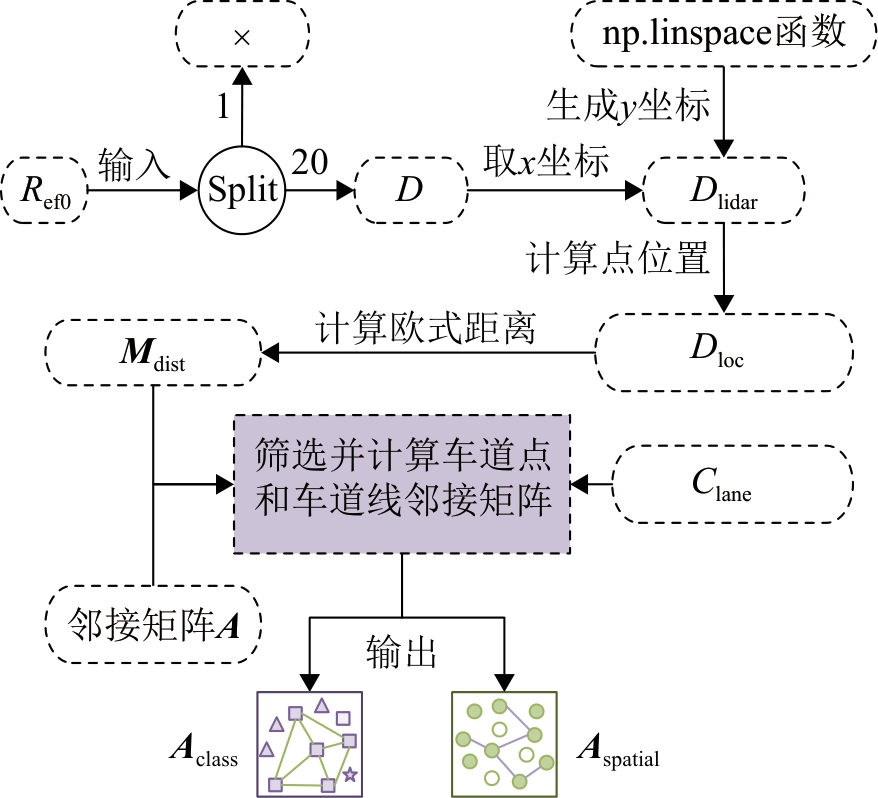
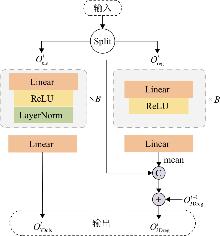
Fig. 4
3D prediction head
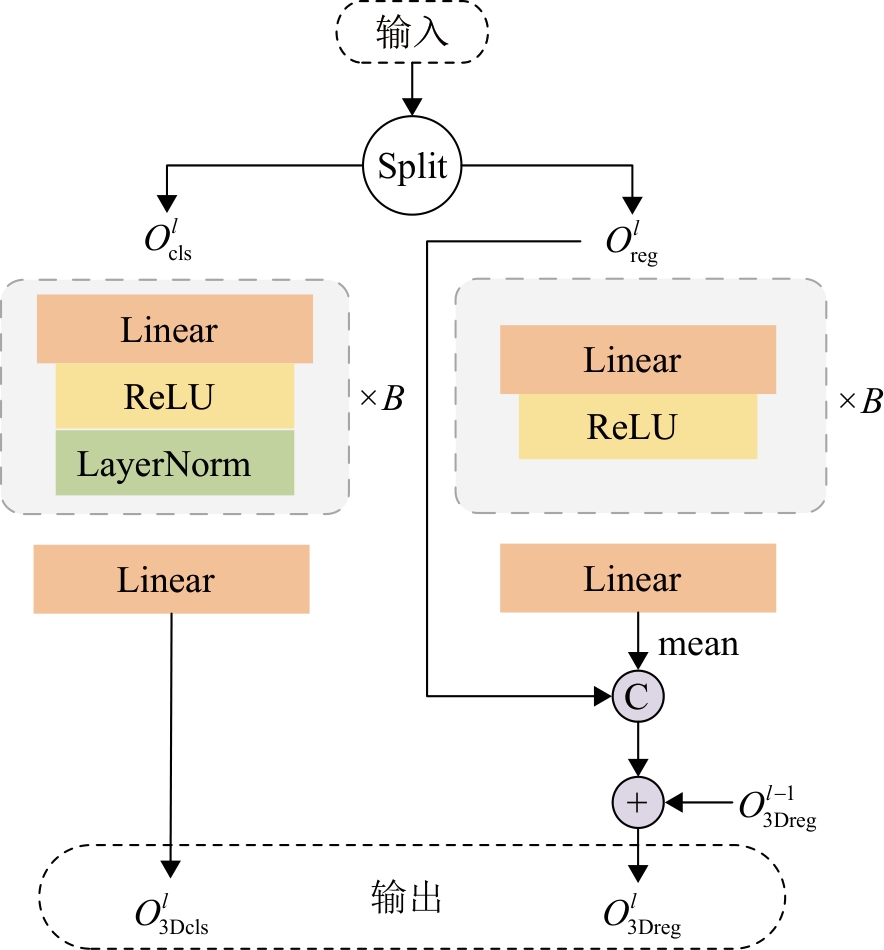
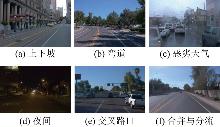
Fig. 5
OpenLane dataset sample
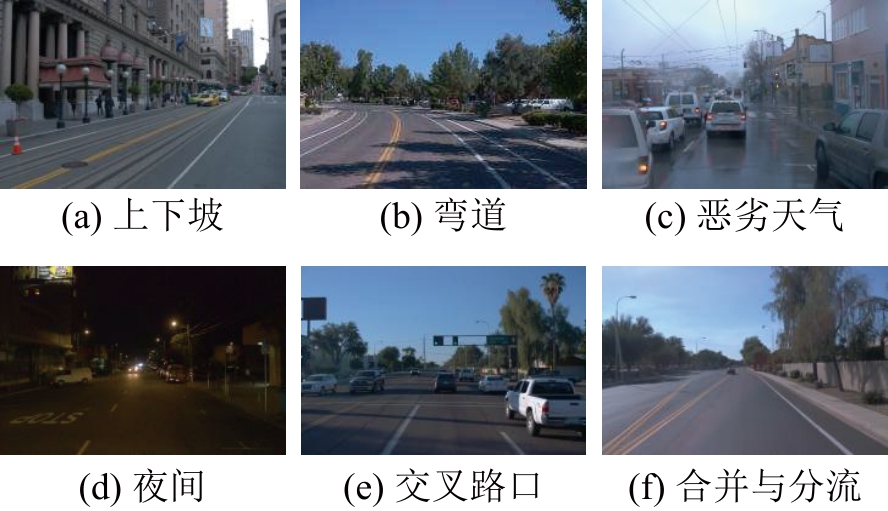
Fig. 6
Example of ONCE-3DLanes dataset
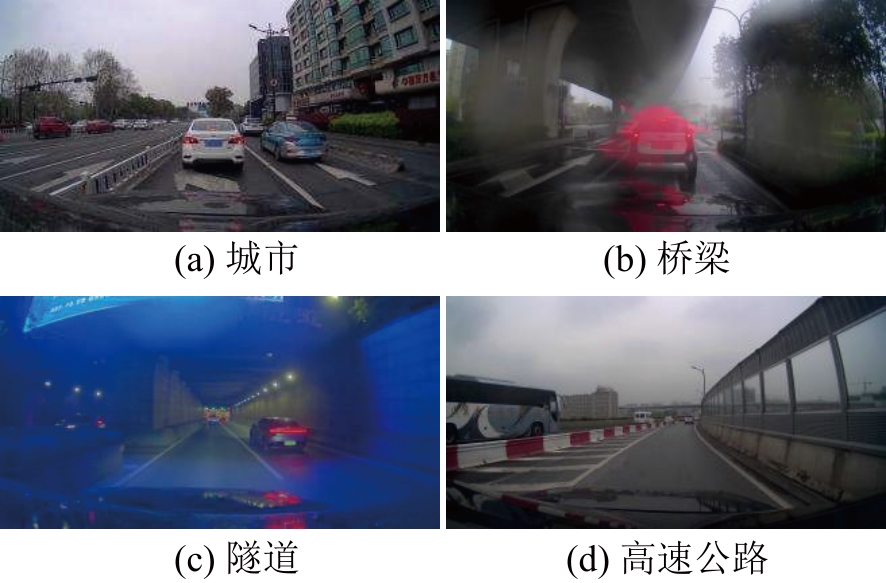

Fig. 7
Apollo Synthetic dataset sample
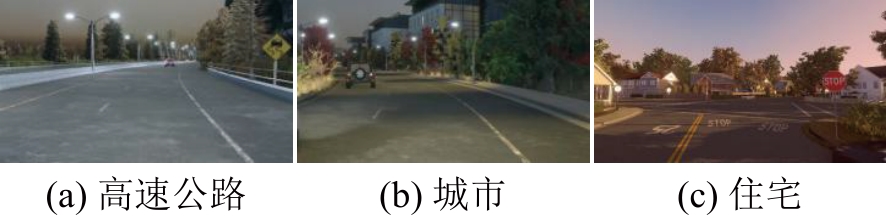
Table 1
Comparative results on OpenLane dataset
| 方法 | F1值/% | C.ACC/% | Ex /(C/m) | Ex /(F/m) | Ez /(C/m) | Ez /(F/m) |
|---|---|---|---|---|---|---|
| 3D-LaneNet[ | 44.1 | ‒ | 0.479 | 0.572 | 0.367 | 0.443 |
| Performer[ | 50.5 | 92.3 | 0.485 | 0.553 | 0.364 | 0.431 |
| CurveFormer++[ | 52.7 | 88.1 | 0.337 | 0.801 | 0.198 | 0.676 |
| Anchor3DLane[ | 53.1 | 90.0 | 0.300 | 0.311 | 0.103 | 0.139 |
| LaneCPP[ | 60.3 | ‒ | 0.264 | 0.310 | 0.077 | 0.117 |
| LATR[ | 61.9 | 91.9 | 0.219 | 0.259 | 0.073 | 0.104 |
| GPLNet | 63.1 | 92.4 | 0.195 | 0.230 | 0.070 | 0.100 |
Table 2
Comparative results of F1 under different scenarios on OpenLane dataset
| 方法 | 全部 | 上下坡 | 弯道 | 极端天气 | 夜间 | 交叉路口 | 合并与分流 |
|---|---|---|---|---|---|---|---|
| 3D-LaneNet | 44.1 | 40.8 | 46.5 | 47.5 | 41.5 | 32.1 | 41.7 |
| Performer | 50.5 | 42.4 | 55.6 | 48.6 | 46.6 | 40.0 | 50.7 |
| CurveFormer++ | 52.7 | 48.3 | 59.4 | 50.6 | 48.4 | 45.0 | 48.1 |
| Anchor3DLane | 53.1 | 45.5 | 56.2 | 51.9 | 47.2 | 44.2 | 50.5 |
| LaneCPP | 60.3 | 53.6 | 64.4 | 56.7 | 54.9 | 52.0 | 58.7 |
| LATR | 61.9 | 55.2 | 68.2 | 57.1 | 55.4 | 52.3 | 61.5 |
| GPLNet | 63.1 | 53.3 | 68.5 | 58.5 | 55.7 | 53.8 | 62.0 |
Fig. 8
Visualization of results on OpenLane dataset
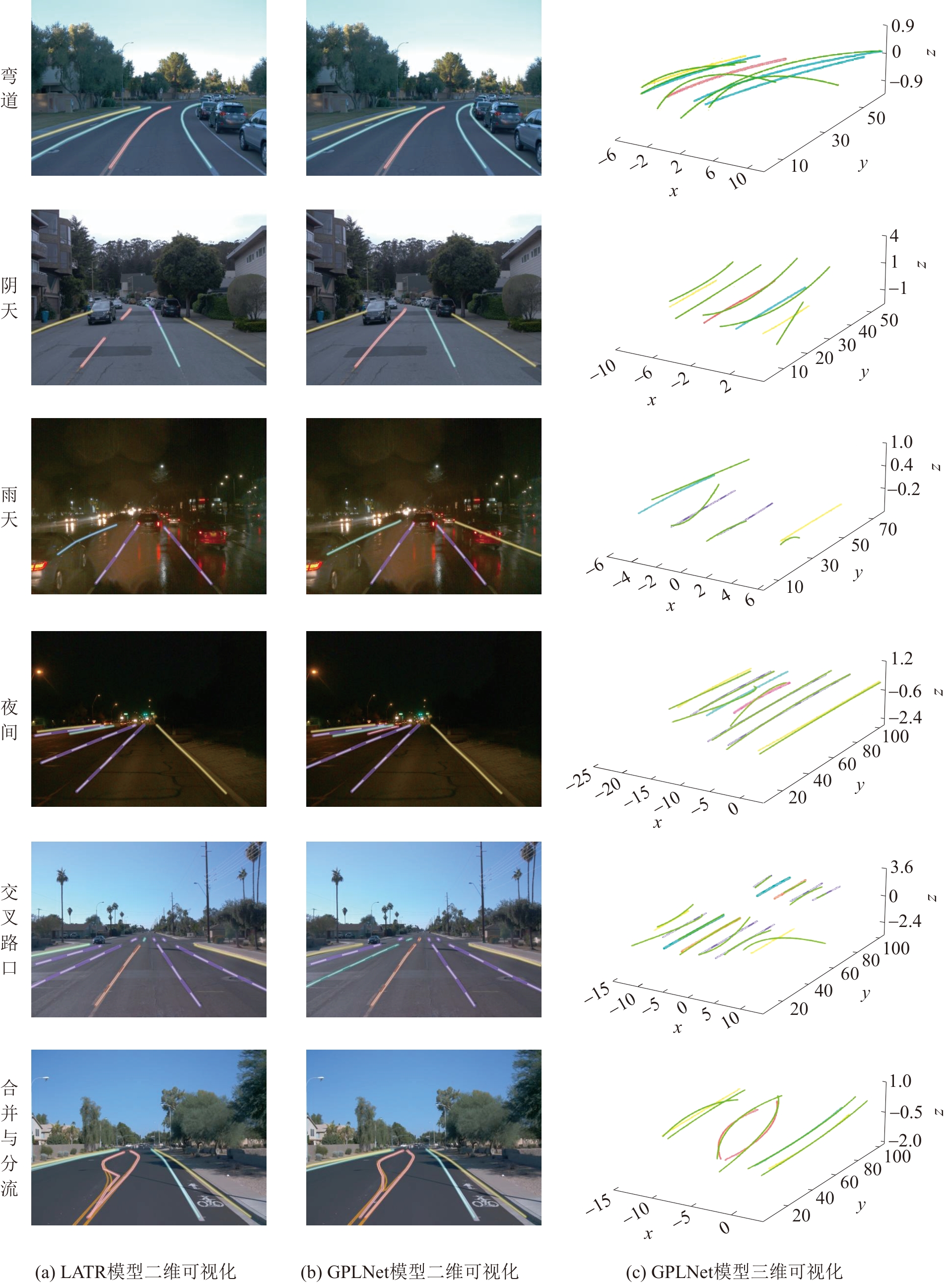
Table 3
Comparison of algorithm's computational power consumption
| 方法 | 参数量×106 | 帧率/(帧/s) | F1值/% |
|---|---|---|---|
| Performer | 63.11 | 11.67 | 50.5 |
| LATR | 44.47 | 13.34 | 61.9 |
| GPLNet | 43.55 | 13.75 | 63.1 |
Table 4
Comparative results on ONCE-3DLanes dataset
| 方法 | F1值/ % | 精确 率/% | 召回 率/% | 距离 误差/m |
|---|---|---|---|---|
| 3D-LaneNet | 44.73 | 35.16 | 61.46 | 0.127 |
| Performer | 74.33 | 80.30 | 69.18 | 0.074 |
| Anchor3DLane | 74.44 | 80.50 | 69.23 | 0.064 |
| DecoupleLane[ | 75.07 | 81.19 | 69.26 | 0.062 |
| CurveFormer++ | 77.85 | 82.22 | 72.79 | 0.081 |
| LATR | 80.59 | 86.12 | 75.73 | 0.052 |
| GPLNet | 80.62 | 83.92 | 77.57 | 0.040 |
Table 5
Comparative results on Apollo Synthetic dataset
| 场景 | 评估指标 | 3D-LaneNet | CLGO | PersFormer | CurveFormer[ | Anchor3DLane | LATR | GPLNet |
|---|---|---|---|---|---|---|---|---|
| 平衡场景 | F1值/% | 86.4 | 91.9 | 92.9 | 95.8 | 95.6 | 96.8 | 96.9 |
| Ex /(C/m) | 0.068 | 0.061 | 0.054 | 0.078 | 0.052 | 0.022 | 0.019 | |
| Ex /(F/m) | 0.477 | 0.361 | 0.356 | 0.326 | 0.306 | 0.253 | 0.243 | |
| Ez /(C/m) | 0.015 | 0.029 | 0.01 | 0.018 | 0.015 | 0.007 | 0.005 | |
| Ez /(F/m) | 0.202 | 0.25 | 0.234 | 0.219 | 0.223 | 0.202 | 0.199 | |
| 稀有场景 | F1值/% | 72.0 | 86.1 | 87.5 | 95.6 | 94.4 | 96.1 | 96.3 |
| Ex /(C/m) | 0.166 | 0.147 | 0.107 | 0.182 | 0.094 | 0.050 | 0.040 | |
| Ex /(F/m) | 0.855 | 0.735 | 0.782 | 0.737 | 0.693 | 0.600 | 0.580 | |
| Ez /(C/m) | 0.039 | 0.071 | 0.024 | 0.039 | 0.027 | 0.015 | 0.011 | |
| Ez /(F/m) | 0.521 | 0.609 | 0.602 | 0.561 | 0.579 | 0.532 | 0.527 | |
| 视觉变体 | F1值/% | 72.5 | 87.3 | 89.6 | 90.8 | 91.4 | 95.1 | 95.2 |
| Ex /(C/m) | 0.115 | 0.084 | 0.074 | 0.125 | 0.068 | 0.045 | 0.036 | |
| Ex /(F/m) | 0.601 | 0.464 | 0.430 | 0.410 | 0.367 | 0.315 | 0.302 | |
| Ez /(C/m) | 0.032 | 0.045 | 0.015 | 0.028 | 0.020 | 0.016 | 0.015 | |
| Ez /(F/m) | 0.23 | 0.312 | 0.266 | 0.254 | 0.232 | 0.228 | 0.220 |
Table 6
Ablation study of each module
| 联合查询嵌入 | 图关系优化 | F1值/% | C.ACC/% | ||||
|---|---|---|---|---|---|---|---|
| × | × | 67.19 | 89.17 | 0.276 | 0.343 | 0.099 | 0.132 |
| √ | × | 69.34 | 91.49 | 0.260 | 0.319 | 0.098 | 0.128 |
| × | √ | 68.60 | 90.60 | 0.259 | 0.320 | 0.098 | 0.131 |
| √ | √ | 71.30 | 93.03 | 0.247 | 0.307 | 0.097 | 0.125 |
Table 7
Ablation study of graph relationship optimization
| 结构关系 | 类别关系 | F1值/% | C.ACC/% | ||||
|---|---|---|---|---|---|---|---|
| × | × | 69.34 | 91.49 | 0.260 | 0.319 | 0.098 | 0.128 |
| √ | × | 71.13 | 92.94 | 0.248 | 0.311 | 0.097 | 0.126 |
| × | √ | 69.45 | 91.97 | 0.255 | 0.324 | 0.097 | 0.130 |
| √ | √ | 71.30 | 93.03 | 0.247 | 0.307 | 0.097 | 0.125 |
Fig. 9
Visualization of ablation experiment on graph relationship optimization
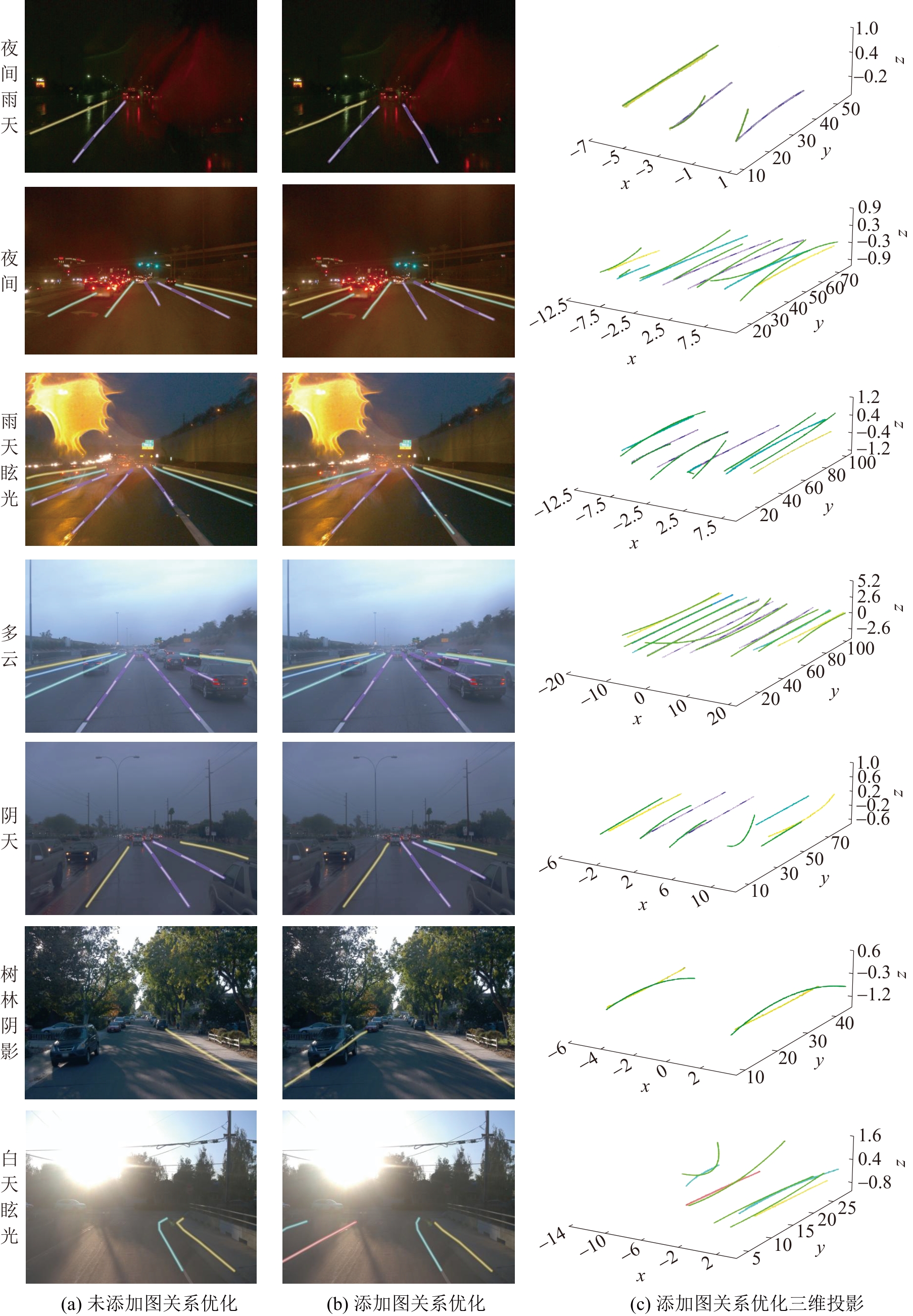
Table 8
Ablation experiment of distance threshold ϵ
F1值/ % | C.ACC/ % | (F/m) | (C/m) | (F/m) | ||
|---|---|---|---|---|---|---|
| 0 | 69.36 | 91.54 | 0.256 | 0.322 | 0.128 | 0.154 |
| 10 | 70.77 | 91.96 | 0.251 | 0.316 | 0.098 | 0.130 |
| 15 | 70.93 | 92.87 | 0.252 | 0.311 | 0.097 | 0.125 |
| 20 | 70.96 | 92.72 | 0.245 | 0.293 | 0.095 | 0.119 |
| 25 | 71.15 | 92.93 | 0.249 | 0.310 | 0.097 | 0.126 |
| 30 | 70.93 | 92.63 | 0.234 | 0.315 | 0.095 | 0.129 |
| 35 | 70.24 | 92.25 | 0.245 | 0.319 | 0.096 | 0.127 |
| [1] | 侯志明. 复杂场景下的车道线检测算法研究[D]. 北京: 北京交通大学, 2024. |
| Hou Zhiming. Research on Lane Line Detection Algorithm in Complex Scenes[D]. Beijing: Beijing Jiaotong University, 2024. | |
| [2] | 崔辰. 5G通信技术下的汽车无人驾驶技术之研究[J]. 时代汽车, 2022(3): 16-18. |
| Cui Chen. Research on Vehicle Driverless Technology Under 5G Communication Technology[J]. Auto Time, 2022(3): 16-18. | |
| [3] | 罗为明, 应朝阳, 孙巍, 等. 辅助驾驶汽车安全技术检验需求研究[J]. 中国标准化, 2023(21): 219-223. |
| Luo Weiming, Ying Zhaoyang, Sun Wei, et al. Research on Safety Technological Inspection Requirements of Vehicles with Driving Assist[J]. China Standardization, 2023(21): 219-223. | |
| [4] | Krizhevsky A, Sutskever I, Hinton G E. ImageNet Classification with Deep Convolutional Neural Networks[J]. Communications of the ACM, 2017, 60(6): 84-90. |
| [5] | 谢春丽, 梁梓涵. 复杂环境下基于实例分割的车道线检测[J]. 重庆交通大学学报(自然科学版), 2025, 44(4): 79-86, 120. |
| Xie Chunli, Liang Zihan. Lane Detection Based on Instance Segmentation in Complex Environment[J]. Journal of Chongqing Jiaotong University(Natural Science), 2025, 44(4): 79-86, 120. | |
| [6] | Zheng Tu, Huang Yifei, Liu Yang, et al. CLRNet: Cross Layer Refinement Network for Lane Detection[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 888-897. |
| [7] | Wang Jinsheng, Ma Yinchao, Huang Shaofei, et al. A Keypoint-based Global Association Network for Lane Detection[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 1382-1391. |
| [8] | Feng Zhengyang, Guo Shaohua, Tan Xin, et al. Rethinking Efficient Lane Detection via Curve Modeling[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 17041-17049. |
| [9] | 葛泽坤, 陶发展, 付主木, 等. 改进多头注意力机制的车道检测方法[J]. 计算机工程与应用, 2024, 60(2): 264-271. |
| Ge Zekun, Tao Fazhan, Fu Zhumu, et al. Lane Detection Method Based on Improved Multi-head Self-attention[J]. Computer Engineering and Applications, 2024, 60(2): 264-271. | |
| [10] | 邹斌, 刘晶. 基于3DLaneTR的三维车道线检测算法[J]. 武汉理工大学学报, 2024, 46(7): 146-151. |
| Zou Bin, Liu Jing. 3D Lane Detection Algorithm Based on 3DLaneTR[J]. Journal of Wuhan University of Technology, 2024, 46(7): 146-151. | |
| [11] | Guo Yuliang, Chen Guang, Zhao Peitao, et al. Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection[C]//Computer Vision-ECCV 2020. Cham: Springer International Publishing, 2020: 666-681. |
| [12] | Garnett Noa, Cohen Rafi, Pe'er Tomer, et al. 3D-LaneNet: End-to-end 3D Multiple Lane Detection[C]//2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2019: 2921-2930. |
| [13] | Chen Li, Sima Chonghao, Li Yang, et al. PersFormer: 3D Lane Detection via Perspective Transformer and the OpenLane Benchmark[C]//Computer Vision-ECCV 2022. Cham: Springer Nature Switzerland, 2022: 550-567. |
| [14] | Huang Shaofei, Shen Zhenwei, Huang Zehao, et al. Anchor3DLane: Learning to Regress 3D Anchors for Monocular 3D Lane Detection[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2023: 17451-17460. |
| [15] | Luo Yueru, Zheng Chaoda, Yan Xu, et al. LATR: 3D Lane Detection from Monocular Images with Transformer[C]//2023 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2023: 7907-7918. |
| [16] | 王世乾. 基于深度学习的车道线检测算法研究[D]. 杭州: 浙江科技大学, 2024. |
| Wang Shiqian. Research on Lane Detection Algorithm Based on Deep Learning[D]. Hangzhou: Zhejiang University of Science and Technology, 2024. | |
| [17] | 胡杰, 陈楠, 徐文才, 等. 基于自适应门控的双路激光雷达三维车道线检测[J]. 中国激光, 2023, 50(22): 132-146. |
| Hu Jie, Chen Nan, Xu Wencai, et al. Three-dimensional Lane Detection Algorithm of Lidar Based on Adaptive Gating and Dual Pathways[J]. Chinese Journal of Lasers, 2023, 50(22): 132-146. | |
| [18] | Xu Keyulu, Hu Weihua, Leskovec J, et al. How Powerful are Graph Neural Networks[EB/OL]. (2019-02-22) [2025-04-25]. . |
| [19] | Shi Weijing, Rajkumar R. Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020: 1708-1716. |
| [20] | 钟凯, 陈颖, 颜承志, 等. 基于图神经网络与动态采样的三维目标检测算法[J]. 激光与光电子学进展, 2025, 62(14): 191-202. |
| Zhong Kai, Chen Ying, Yan Chengzhi, et al. 3D Object Detection Algorithm Based on Graph Neural Network and Dynamic Sampling[J]. Laser & Optoelectronics Progress, 2025, 62(14): 191-202. | |
| [21] | Büchner Martin, Zürn Jannik, Todoran Ion-George, et al. Learning and Aggregating Lane Graphs for Urban Automated Driving[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2023: 13415-13424. |
| [22] | 刘凯, 汪佳琴, 李汉涛. 基于深度学习的车辆轨迹预测研究综述[J]. 郑州大学学报(工学版), 2025, 46(5): 77-89. |
| Liu Kai, Wang Jiaqin, Li Hantao. A Review of Vehicle Trajectory Prediction Based on Deep Learning[J]. Journal of Zhengzhou University(Engineering Science), 2025, 46(5): 77-89. | |
| [23] | Wang Yue, Solomon J. Object DGCNN: 3D Object Detection Using Dynamic Graphs[C]//Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 20745-20758. |
| [24] | Yang Chenhongi, Lin Tianwei, Huang Lichao, et al. WidthFormer: Toward Efficient Transformer-based BEV View Transformation[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2024: 8457-8464. |
| [25] | Brody S, Alon U, Yahav E, et al. How Attentive are Graph Attention Networks[EB/OL]. (2022-01-31) [2025-04-25]. . |
| [26] | Yan Fan, Nie Ming, Cai Xinyue, et al. ONCE-3DLanes: Building Monocular 3D Lane Detection[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 17122-17131. |
| [27] | Pan Xingang, Shi Jianping, Luo Ping, et al. Spatial as Deep: Spatial CNN for Traffic Scene Understanding[C]//Proceeding of the Thirty-Second AAAI Conference on Artificial Intelligence and the Thirtieth Innovative Applications of Artificial Intelligence Conference and the Eighth Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2018: 7276-7283. |
| [28] | Wang Ze, Ren Weiqiang, Qiu Qiang, et al. LaneNet: Real-time Lane Detection Network[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2018: 1-5. |
| [29] | Efrat N, Bluvstein M, Oron S, et al. 3D-LaneNet+: Anchor Free Lane Detection Using a Semi-local Representation[EB/OL].(2020-11-04) [2025-04-25]. . |
| [30] | Bai Yifeng, Chen Zhirong, Liang Pengpeng, et al. CurveFormer++: 3D Lane Detection by Curve Propagation with Temporal Curve Queries and Attention[EB/OL]. (2025- 03-16) [2025-04-25]. . |
| [31] | Pittner Maximilian, Janai Joel, Condurache Alexandru P. LaneCPP: Continuous 3D Lane Detection Using Physical Priors[C]//2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2024: 10639-10648. |
| [32] | Han Wencheng, Shen Jianbing. Decoupling the Curve Modeling and Pavement Regression for Lane Detection[EB/OL]. (2023-09-19) [2025-04-25]. . |
| [33] | Bai Yifeng, Chen Zhirong, Fu Zhangjie, et al. CurveFormer: 3D Lane Detection by Curve Propagation with Curve Queries and Attention[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2023: 7062-7068. |
| [1] | Jiang Yanji, Zhang Yingyang, Dong Hao, Zhang Xiaoguang, Wang Meihui. Lane Detection in Dark Light Based on Instance Association [J]. Journal of System Simulation, 2025, 37(9): 2188-2199. |
| [2] | Wu Jianping, Li Guanzhou, Zhao Shuai, Huang Ling. Intelligent Transition of Automotive Industry Driven by Autonomous Driving Simulation Testing Technology [J]. Journal of System Simulation, 2025, 37(7): 1649-1664. |
| [3] | Ji Peng, Zhao Jinpeng, Jiang Limin. Design and Function Analysis of New Steering System for Autonomous Vehicle [J]. Journal of System Simulation, 2025, 37(1): 211-219. |
| [4] | Lu Bin, Wang Minghan, Sun Yang, Yang Zhenyu. Global-local Fusion for Efficient 3D Object Detection [J]. Journal of System Simulation, 2024, 36(11): 2616-2630. |
| [5] | Wang Gaihua, Li Kehong, Long Qian, Yao Jingxuan, Zhu Bolun, Zhou Zhengshu, Pan Xuran. Object Detection of Lightweight Transformer Based on Knowledge Distillation [J]. Journal of System Simulation, 2024, 36(11): 2517-2527. |
| [6] | Su Tong, Wang Ying, Deng Qiyang, Li Zhaobin. Improved Foggy Pedestrian and Vehicle Detection Algorithm Based on YOLOv5 [J]. Journal of System Simulation, 2024, 36(10): 2413-2422. |
| [7] | Zhu Zhengze, Zhou Haiying, Fu Yongzhi, Zhou Kui, Wang Sishan, Gong jiayuan, Deng Sihao, Hou Kunming. Cooperative Control Technology of Networked Autonomous Driving Vehicle Based on Delay Compensation [J]. Journal of System Simulation, 2019, 31(7): 1448-1459. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
