

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (12): 3033-3049.doi: 10.16182/j.issn1004731x.joss.25-0576
• Overview • Previous Articles Next Articles
Xiong Jun1, Zhang Wenbo1, Xiong Zhi2, Zhou Feng1, Yang Bo1
Received:2025-06-19
Revised:2025-08-23
Online:2025-12-26
Published:2025-12-24
CLC Number:
Xiong Jun, Zhang Wenbo, Xiong Zhi, Zhou Feng, Yang Bo. Survey of Cooperative Multi-Agent Path Finding[J]. Journal of System Simulation, 2025, 37(12): 3033-3049.
Table 1
Comparison between MAPF and Co-MAPF
| 对比维度 | MAPF | Co-MAPF |
|---|---|---|
| 核心目标 | 为每个智能体规划无碰撞路径,确保所有智能体从起点到达终点,主要关注路径可行性 | 在无碰撞的基础上,通过智能体间协同合作提升整体性能 |
| 协作方式 | 通过优先级规划、冲突避免等被动方式避免碰撞,智能体间无主动信息共享或目标协调 | 引入主动协作机制,智能体主动调整行为以配合其他个体 |
| 信息依赖 | 依赖局部或全局信息进行路径规划,但不强调智能体间的实时信息交互 | 需要智能体间通信,以实现动态协同决策 |
| 应用场景 | 对整体效率要求较低、智能体交互简单的场景 | 适用于大规模、高动态场景,需提升整体系统效率 |
Table 2
Advantages and disadvantages of 3 architectures
| 架构 | 优点 | 缺点 |
|---|---|---|
| 集中式 | 全局优化路径质量高;规划效率稳,适合静态小规模场景 | 计算复杂度指数级增长,可扩展性差;依赖中央节点单点容错差 |
| 分布式 | 动态适应性强,支持大规模集群;通信压力低 | 局部优化易导致全局次优;依赖高效协同协议,冲突风险高 |
| 混合式 | 平衡规划质量与灵活性;部分容错性提升 | 接口设计复杂,层级通信瓶颈需额外管理;全局约束可能导致局部僵化 |

Fig. 1
Sampling-based Co-MAPF framework
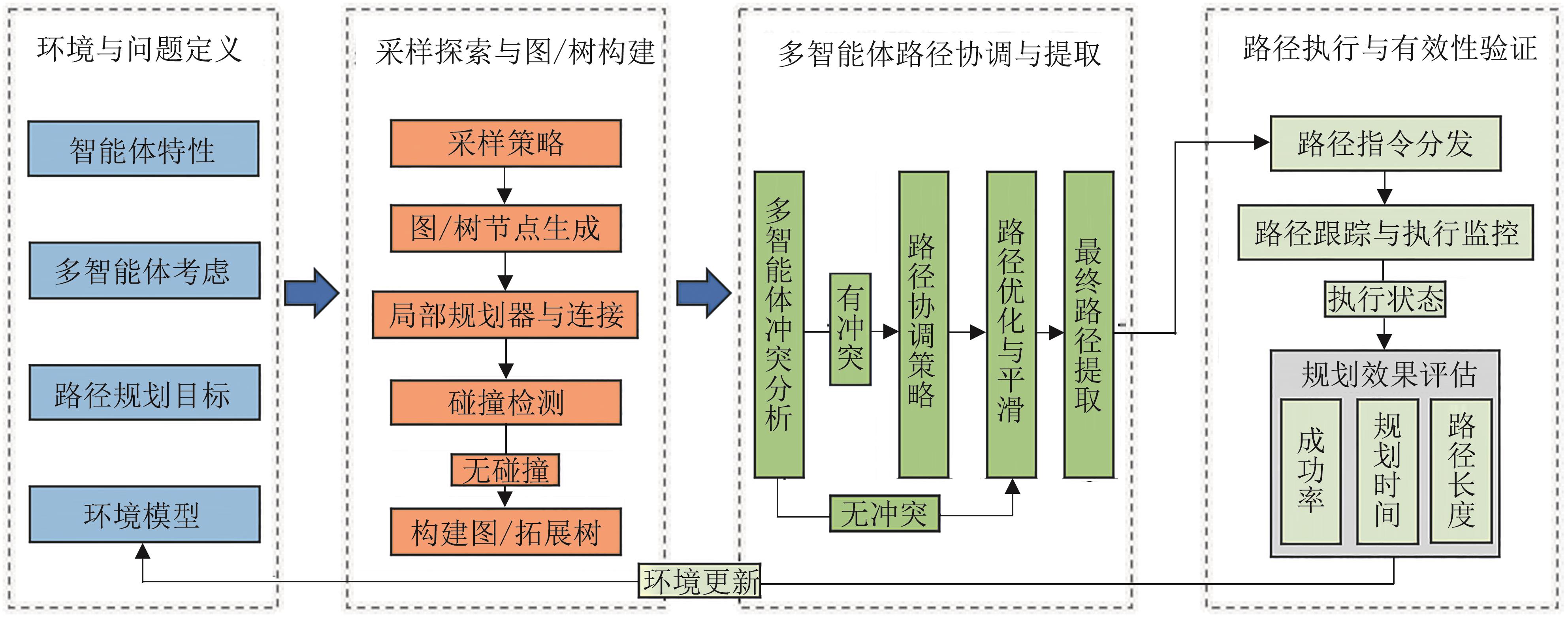
Table 3
Algorithms based on sampling
| 类型 | 算法 | 核心理论 | 特点 |
|---|---|---|---|
| RRT | 改进RRT*[ | 通过目标偏向采样、动态障碍物建模、运动约束集成进行优化 | 解决动态环境下多机器人协同避障问题,适用于复杂环境协同任务 |
| Multi-RRT*[ | 基于单智能体动态RRT*的分散迭代算法,采用“规划-比较-分配”框架,冲突方视为动态障碍进行局部重规划 | 解决共享环境协同路径规划,保证有限迭代内收敛到无冲突路径 | |
| RRT*的领导者-跟随者[ | 双层结构:领导者离线规划全局路径,跟随者通过网络/共识协议协同,并融合APF确保安全距离 | 用于动态障碍环境下的轨迹规划与跟踪,确保智能体间及与障碍物间的安全距离 | |
| MA-RRT*FN[ | 对MA-RRT*的改进,引入动态节点移除机制,移除“弱节点”以限制节点数量 | 降低内存消耗的同时保持规划性能,内存需求低且固定 | |
| MFM-RRT*[ | 基于RRT*改进,引入探索期和切割周期,提出新路径成本函数并结合APF减少编队变形 | 用于有严格编队保持要求的任务,保持安全距离 | |
| 改进拍卖算法和QS-RRT[ | 结合改进拍卖算法和QS-RRT(quick and smooth convergence RRT),引入节点快速收敛策略和协同约束机制 | 保证路径长度近似最优,降低到达目标时间,提升整体任务执行效率 | |
| PRM | 改进PRM(能量感知)[ | 优化采样空间,考虑智能体的能量消耗 | 智能体根据能量状况规划路径,避免因个体能量不足影响整体任务 |
| 改进PRM(鲁棒性)[ | 从环境建模、算法优化、路径后处理方面进行改进 | 提升算法在复杂环境中的鲁棒性和可靠性 | |
| 基于“存活策略”[ | 结合Boustrophedon运动和回溯点检测,实时感知并分解任务,结合PRM生成路径 | 分布式探索,实时环境感知,生成无冲突路径 | |
| Voronoi | 结合其他路径规划算法[ | 基于Voronoi图,结合其他路径规划算法进行协同定位 | 实现全局目标的无冲突协同定位,提升整体路径规划的效率和效果 |

Fig. 2
Search-based Co-MAPF framework
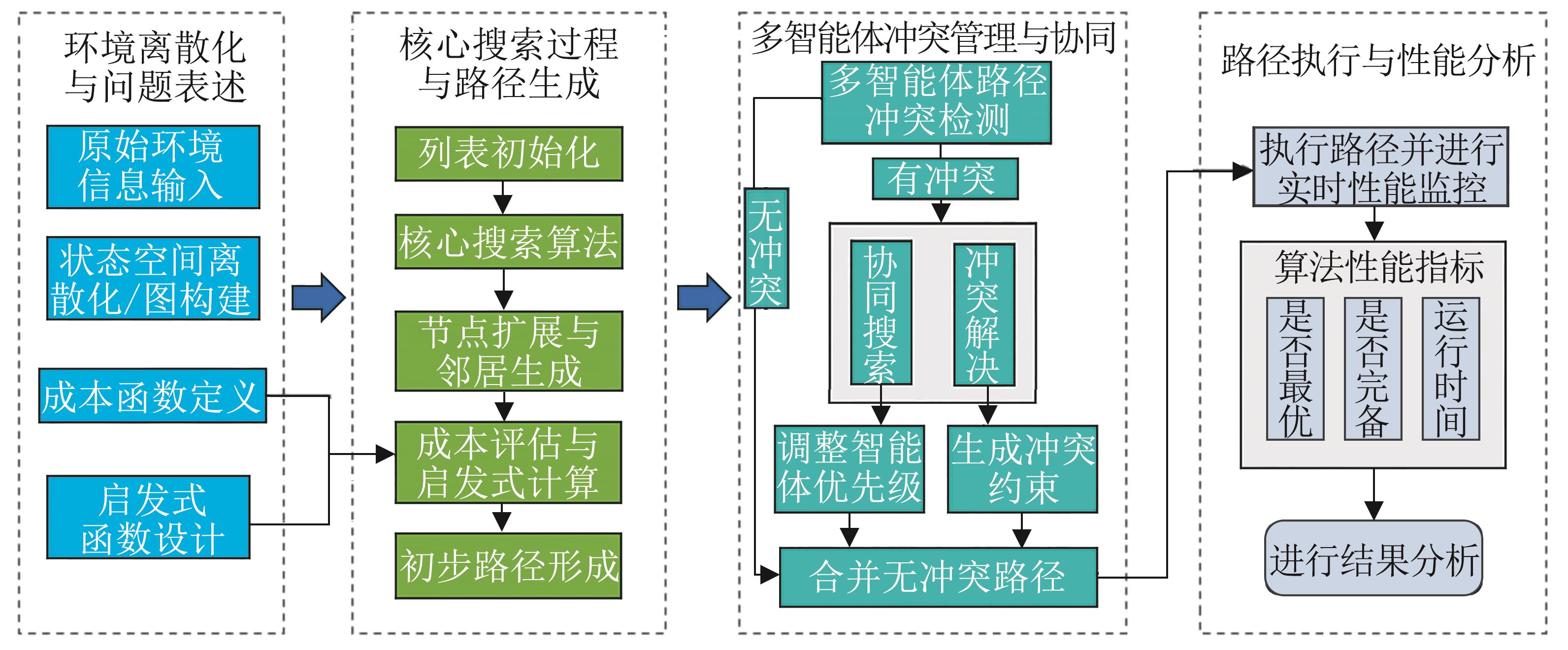
Table 4
Algorithms based on search
| 类型 | 算法 | 核心理论 | 特点 |
|---|---|---|---|
| A* | EPEA*(enhanced partial expansion A*)及其变体[ | 通过算子选择函数(operator selection function, OSF)仅生成当前所需的子节点 | 优化节点生成效率,避免冗余节点,减少内存和时间消耗 |
| 冲突导向的窗口式分层合作A*算法(conflict oriented windowed hierarchical cooperative A*, CO-WHCA*) [ | 基于冲突导向的窗口分层协作A*,动态识别冲突点生成协调窗口 | 改进在线协同效率,减少无效规划复杂度,动态确定最优协调顺序 | |
| A*、A*++以及带重构的A*++[ | 引入成本感知启发函数 | 提高计算效率,保证最优性,减少节点扩展量,用于动态环境 | |
| 冲突搜索与时空混合的A*算法(conflict search and space-time hybrid A*, CS-STHA) [ | 融合冲突搜索机制与改进的时空混合路径规划技术 | 有效解决协同避碰难题 | |
| 改进协同A*算法(improved cooperative A*, ICA*) [ | 引入转弯成本与路径重复成本,结合动态权重引导策略 | 减少转向和重叠,优化总移动步数、完成时间和等待时长 | |
| 基于时间的协同A*[ | 引入时间维度扩展状态空间,时序优先级调度 | 实现时空联合避障,保证最优性,处理动态协调性与计算效率平衡 | |
| 基于讨价还价博弈的改进型分层协作A*算法(bargaining game based improving hierarchical cooperative A*, B-IHCA*) [ | 通过协商博弈机制构造框架,加入带熔断机制的改进HCA*作为内核 | 通过调整迭代达成无冲突协调路径方案 | |
| D* | D*分布式求解器[ | D*全局规划生成探索点,分布式求解器分配任务,自适应规划器生成轨迹 | 融合多尺度规划与分布式协作,用于部分未知城市环境,优化行驶距离 |
| RHC | 后退水平图搜索算法(receding horizon graph search, RHGS) [ | 结合后退水平控制与图搜索,采用同步组合FSA(finite state automaton)描述协同,惰性边缘评估减少碰撞检测 | 结合实时性与最优性,减少碰撞检测计算量 |
| OBS | 基于顺序搜索和时间调度的算法(order-based search with kinematics arrival time scheduling, OBS-KATS) [ | 双层级:高层基于顺序搜索,低层进行运动学到达时间调度 | 结合全局顺序优化与运动学调度,兼具最优性、完备性和高效性 |
| LNS | 协同并行大邻域搜索算法(cooperative parallel large neighborhood search, CPLNS) [ | 引入分组协作策略,采用SIPPS(safe interval path planning with soft constraints)组内共享最优解,并整合模拟退火增强搜索能力 | 解决大规模MAPF问题,改进LNS的并行扩展性与效率,优化通信与内存效率 |
| M* | TC-M*[ | 基于M*的冲突检测和MOM*的多目标处理技术,在联合图上搜索,动态扩展子图 | 对所有团队协作路径规划问题(teamwise cooperative path finding, TCPF)完备,保证终止 |
| CBS | TC-CBS[ | 基于冲突搜索(conflict-based search, CBS),并扩展到多团队、多目标场景,高层约束管理,低层单智能体规划 | 在完全协作的场景中,TC-CBS是完备的,能找到所有成本唯一的帕累托最优解 |
| TC-CBS-t[ | 引入目标变换,通过为每个团队的目标函数添加一个小的加权项,将问题转化为完全协作问题,从而保证算法完备性 | TC-CBS-t解决了TC-CBS的不完备性问题,确保算法在有限时间内终止 | |
| LaCAM | LaCAM*[ | 在LaCAM算法(lazy constraints addition search for MAPF)基础上,增加持续搜索和重写节点间父级关系的机制 | 具有完备性和最优性,能在找到初始解后逐步优化解的质量 |
| 改进LaCAM*[ | 提出多种技术,包括非确定性节点提取、递归使用LaCAM*等,融合这些技术提升解的质量 | 能在实时性要求下提升解的质量,且能处理多达10 000个智能体的极端场景 | |
| Real-Time LaCAM[ | 通过增量构建LaCAM深度优先搜索,在毫秒级截止时间内计算部分路径并重新规划 | 运行时间极短,适用于拥挤环境,且可与机器学习策略结合 | |
| PBS | D-PBS(dueling priority-based search)[ | 高层:按冲突对数量递增顺序扩展子节点;低层:优先扩展冲突数量最少的节点 | 能更快减少冲突,提升在高智能体密度和多障碍物环境下的性能 |
| 贪婪优先级搜索算法(greedy priority-based search, GPBS) [ | 整合低层的交替对决式冲突,解决和高层的同伦群优先级绑定技术,在PBS框架下协调多智能体运动 | 有效解决拥挤环境中的死锁问题,提高在大量非完整约束机器人场景下的可扩展性 |
Fig. 3
Co-MAPF framework based on intelligent optimization
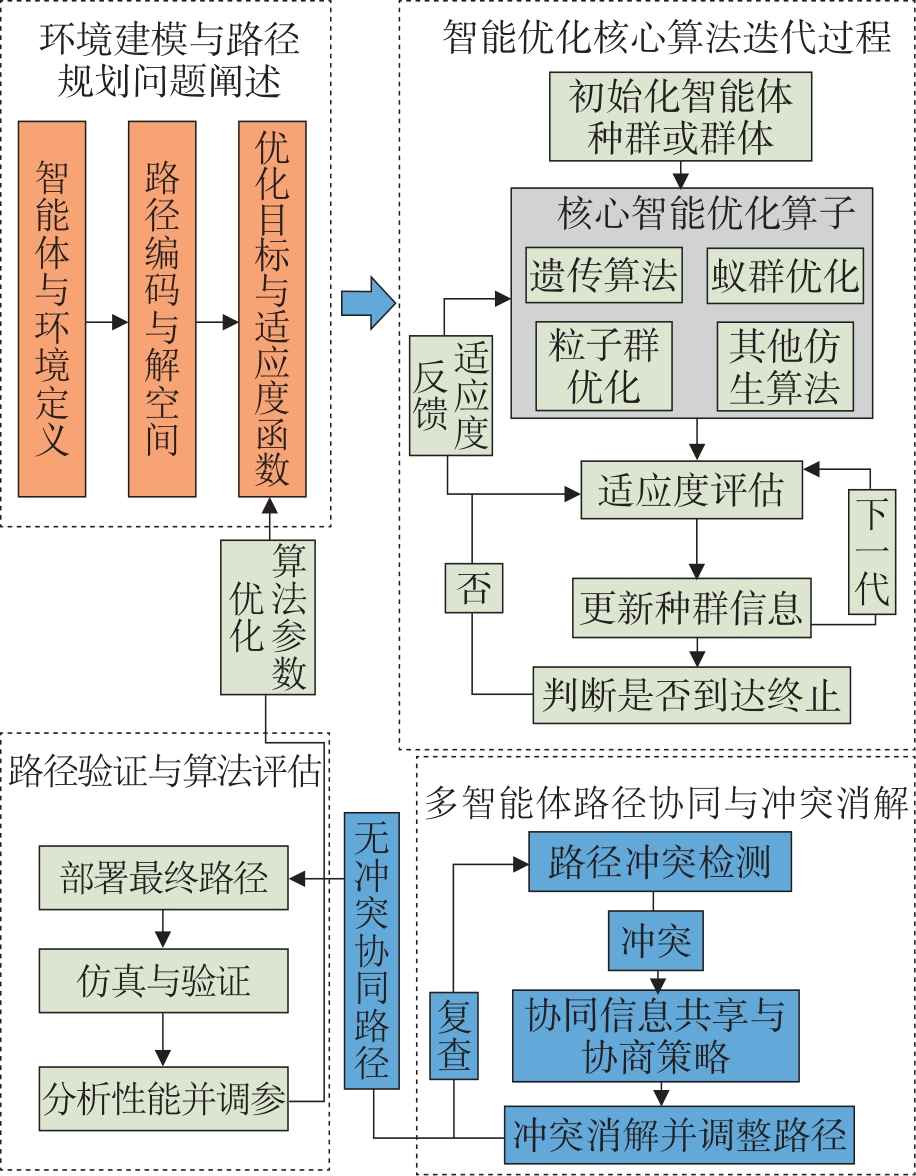
Table 5
Algorithms based on intelligent optimization
| 类型 | 算法 | 核心理论 | 特点 |
|---|---|---|---|
| 遗传算法 | 分散式异步协作遗传算法(decentralized asynchronous collaborative GA, DAC-GA) [ | 分散式异步协作GA,智能体依赖本地GA和稀疏通信交换的“交接值”实现协作,并异步更新交接值 | 低通信开销,平衡局部优化与全局协作,支持动态环境实时响应 |
| 粒子群优化算法 | SRVPSO(Simultaneous Replanning Vectorized PSO)[ | 耦合任务分配与路径规划,任务分配采用妥协视图模型,路径规划采用SRVPSO,碰撞避免 | 通过PSO群体智能实现高效协同,支持动态环境实时重规划 |
| 妥协视图(compromise view, CV)/最近邻搜索(NNS)[ | 对比2种任务分配模型,两者均采用SRVPSO进行路径规划 | 分析不同任务分配策略,CV路径短耗时长,NNS计算快路径略长 | |
| AFSA-PSO[ | 结合PSO群体搜索和人工鱼群算法(artificial fish swarm algorithm, AFSA)局部觅食模拟,通过粒子位置编码进行协同策略,分群体并行优化并引入变异机制增强多样性 | 解决集中式控制局限,兼具全局收敛性与快速局部收敛能力 | |
| IPPSO(improved potential field-based PSO)[ | 改进的PSO算法 | 用于未知环境协同目标搜索,在狭窄区域表现好,能高效搜索覆盖目标簇 | |
| 蚁群优化算法 | 改进ACO[ | 智能体动态采集信息更新信息素,结合计算机视觉调整启发式权重 | 利用信息素机制实现间接协作 |
| 基于ACO[ | 模拟蚁群自组织和正反馈,引入模糊神经网络处理不确定性,结合主成分分析(principle component analysis, PCA)评估效率 | 实现分布式全局最优路径搜索,提升复杂环境中自适应性与协作效率 | |
| 蚁群信息素决策[ | 将信息素机制与分布式通信结合 | 实现无人集群自主协同与动态环境适应 | |
| 萤火虫算法 | ASBAF[ | MAS和萤火虫算法融合,结合信任机制和奖励驱动策略,利用FA优化路径选择 | 有效任务分配与协作决策,应对复杂事件能力强,性能优势明显 |
| 甲虫触角搜索算法 | BAS(beetle antennae search, BAS)+PSO[ | 融合BAS和PSO | 解决传统PSO在机器人数量较少时易过早收敛的问题 |
| BNN | 双改进生物启发神经网络算法(dual improved bio-inspired neural network, DIBNN) [ | 通过改进的神经网络模型和协作机制,构建了DIBNN,从而实现未知复杂环境下的多机器人高效协同区域搜索 | 兼顾搜索效率与路径优化,为未知环境协同任务提供新思路 |
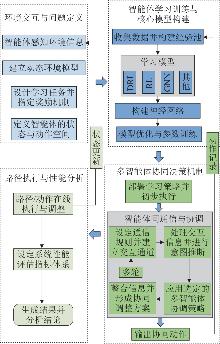
Fig. 4
Learning-based Co-MAPF framework
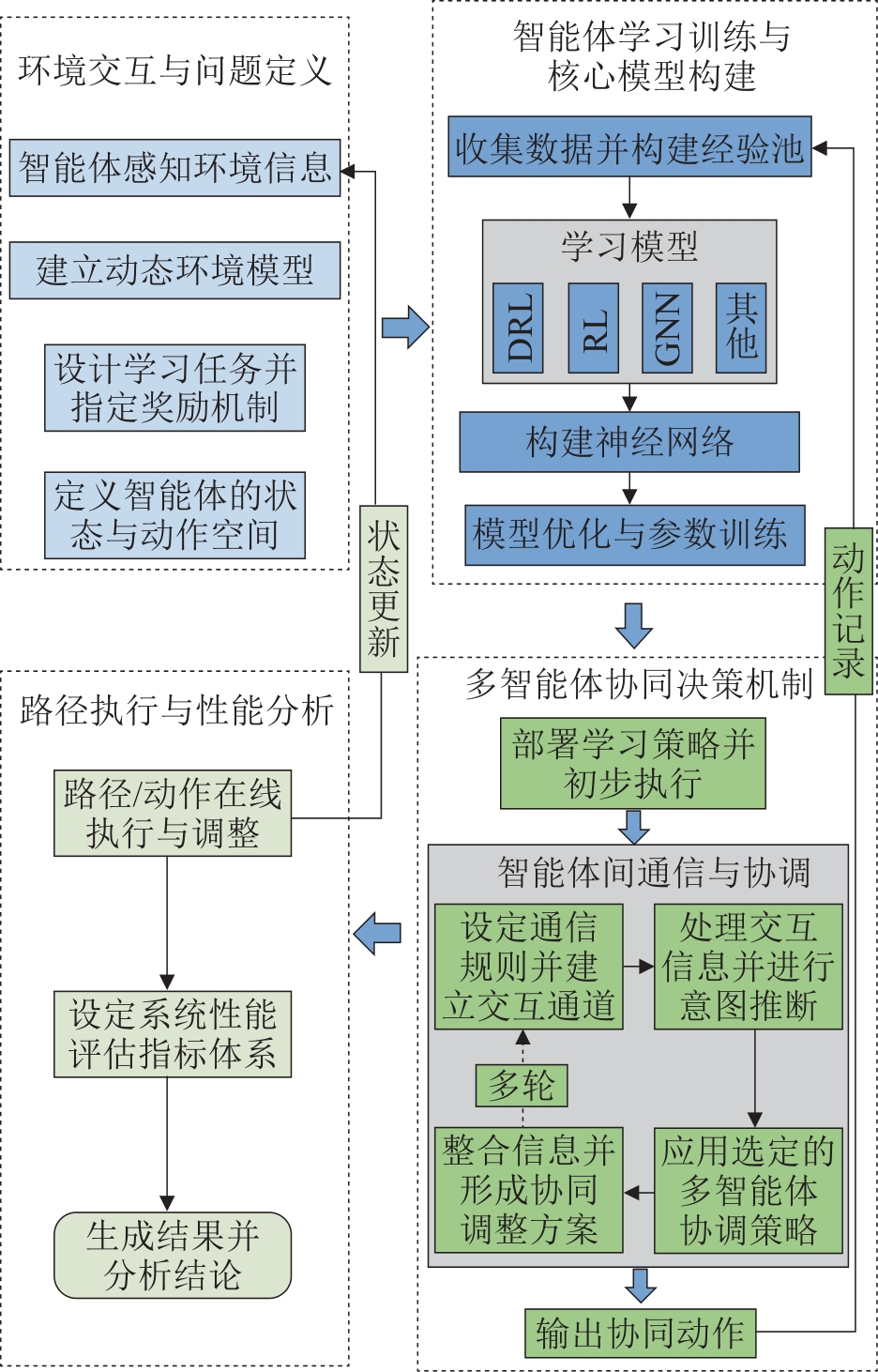
Table 6
Algorithms based on traditional RL
| 算法 | 核心理论 | 特点 |
|---|---|---|
| Q-learning[ | 设计动态奖励函数,引入协作优先级策略 | 通过Q-learning和设计策略引导协作 |
| 混合势场+Q-learning[ | 混合势场与Q-learning结合学习局部路径,利用环境知识进行跨子目标增量学习 | 减少随机探索步数,分布式实现 |
| 基于Holonic系统的协作Q-learning[ | 本地决策更新本地Q表,头Holon协作整合经验,通过置信度权重更新全局Q表 | 平衡个体贡献可靠性,分层协作架构 |
| Q-learning+迁移学习(transfer learning, TL)[ | 多智能体并行学习生成独立Q表,通过迁移学习整合子Q表作为初始Q表 | 加速整体学习过程 |
| VDN[ | 采用价值分解网络(value-decomposition networks, VDN) | 解决因局部观测导致的“虚假奖励”问题,避免“懒惰智能体”现象 |
| 符号距离场(signed distance field, SDF)[ | SDF-FPP(SDF-based formation path planning)+RL生成虚拟领导者轨迹,AOFC算法(adaptive-offset formation control)将SDF信息转为动态偏移函数 | 将SDF引入编队控制,实现编队形变避障。维持编队结构,处理输入饱和和不确定扰动 |
Table 7
Algorithms based on deep reinforcement learning
| 算法 | 核心理论 | 特点 |
|---|---|---|
| MACNS(multi-agent collaborative navigation system)[ | 设计图近端策略优化算法,将GNN集成到策略网络 | 实现智能体的同质化决策,优于传统PPO方法 |
| AMTP[ | 将AC运用于多智能体强化学习(MARL)并结合DDPG | 协同优化任务分配和路径规划;适用动态环境及高实时性场景 |
| SAC+AIT*[ | 将SAC算法与基于采样的路径规划方法AIT*(adaptively informed trees)结合 | 解决复杂环境下的多智能体避障导航问题 |
| 基于MADDPG的模型[ | 采用集中训练与分散执行框架,设计状态/动作空间,结合稀疏与形式化奖励 | 针对复杂多机避障与路径优化,实现多机协同决策 |
| 基于MADDPG的模型[ | 机器人自主选择目标位置,通过全局策略共享提升协作 | 无需预设机器人与目标点对应关系,提升协作效率 |
| 基于MADDPG的模型[ | 将动态分配与MAPF建模为MARL框架,通过共享策略网络实现协作 | 实现跨智能体的协作决策 |
| MADDPG+PER[ | MADDPG中引入优先经验回放机制(prioritized experience replay, PER),根据TD-error(temporal difference error)调整学习优先级 | 加速策略收敛,提升路径稳定性 |
| CPER-MADDPG[ | MADDPG结合组合优先级经验回放(combined prioritized experience replay, CPER),设计双优先级回放机制;融合TD-error、即时奖励计算经验重要性 | 显著提升关键样本利用率,在大规模复杂环境下表现更优 |
| NP-MAPPO(network pruning-based multi-agent PPO)[ | 扩展PPO至多智能体场景,引入网络剪枝技术优化策略网络结构 | 较传统MAPPO显著提高训练效率,多目标场景下路径规划成功率优于MADDPG等 |
| APF融入DRL[ | 通过APF构建势场,将其转化为DRL的动态奖励信号 | 在部分可观测环境中同步完成路径规划与任务决策 |
Table 8
Algorithms based on graph structure learning
| 算法 | 核心理论 | 特点 |
|---|---|---|
| GNN[ | 结合CNN和GNN;实现信息的局部共享 | 解决受限观测和通信下的协同导航,促进智能体间协作 |
| 结合CNN、GraphSAGE和MLP | 实现局部通信与观测下的协作,增强全局认知 | |
| MAG-DQN[ | 将GCN与DRL结合,利用GCN处理图拓扑信息,结合集中式深度Q学习分配探索目标 | 利用图拓扑信息进行动态目标分配 |
| SAMARL[ | 通过时空图建模复杂交互,利用注意力机制捕捉时空依赖生成策略,采用CTDE范式 | 多智能体协同社会感知导航,保持安全距离 |
| IntNet[ | 引入意图共享和自适应通信调度,预测模块生成未来状态/意图。结合GAT处理邻居消息,通信调度器优化传输 | 减少冗余通信 |
| MAGAT[ | 引入键-查询注意力机制评估邻居消息重要性,通过软加权聚合关键信息 | 解决GNN无法区分消息优先级问题,减少冗余通信和规划冲突 |
| DHC[ | 利用图卷积和多头注意力机制实现局部通信协调,采用分布式独立Q学习框架,通过课程学习增加复杂度 | 用于拥挤环境下协同路径规划,协调行动避免碰撞,支持大规模扩展 |
Table 9
Other learning algorithms
| 算法 | 核心理论 | 特点 |
|---|---|---|
| PRIMAL[ | 结合RL与IL,智能体基于局部视野实时规划,隐式协调其他智能体行为 | 解决传统集中式规划在规模扩展和实时性上的局限性,避免显式通信 |
| PRIMALc[ | 智能体通过“预测图”共享未来几步的预测动作 | 通过通信机制增强协作,但增加了训练复杂性,适合需要高协调性的多智能体场景 |
| PRIMAL2[ | 对PRIMAL的改进,增强结构化感知,使用隐性公约学习,优化训练框架 | 解决原PRIMAL在复杂结构化场景中协调效率低、死锁频繁的问题;证明分布式RL在在线规划中的潜力 |
| Park Algorithm[ | 标记矩阵评估探索价值,结合历史经验更新策略E_path/G_path生成路径,自适应概率平衡探索 | 实现自我学习与相互协作,有效克服稀疏解空间下的低效搜索,避免陷入局部最优 |
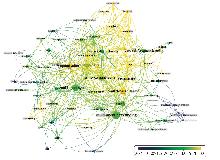
Fig. 5
Research hotspot map of Co-MAPF

| [1] | Torreño Alejandro, Onaindia Eva, Komenda Antonín, et al. Cooperative Multi-agent Planning: A Survey[J]. ACM Computing Surveys, 2018, 50(6): 84. |
| [2] | Stern Roni, Sturtevant Nathan R, Felner Ariel, et al. Multi-agent Pathfinding: Definitions, Variants, and Benchmarks[C]//Proceedings of the Twelfth International Symposium on Combinatorial Search (SoCS 2019). Palo Alto: AAAI Press, 2019: 151-158. |
| [3] | Greshler Nir, Gordon Ofir, Salzman Oren, et al. Cooperative Multi-agent Path Finding: Beyond Path Planning and Collision Avoidance[C]//2021 International Symposium on Multi-robot and Multi-agent Systems (MRS). Piscataway: IEEE, 2021: 20-28. |
| [4] | Ho Florence, Geraldes Rúben, Gonçalves Artur, et al. Decentralized Multi-agent Path Finding for UAV Traffic Management[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 997-1008. |
| [5] | Ho Florence, Salta Ana, Geraldes Ruben, et al. Multi-agent Path Finding for UAV Traffic Management[C]//Proceedings of the 18th International Conference on Autonomous Agents and Multiagent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2019: 131-139. |
| [6] | Choudhury S, Solovey Kiril, Kochenderfer M, et al. Coordinated Multi-agent Pathfinding for Drones and Trucks Over Road Networks[EB/OL]. (2022-02-10) [2025-04-16]. . |
| [7] | Xiang Hongyu, Han Yuhang, Pan Nan, et al. Study on Multi-UAV Cooperative Path Planning for Complex Patrol Tasks in Large Cities[J]. Drones, 2023, 7(6): 367. |
| [8] | Huang Taoan, Li Jiaoyang, Koenig S, et al. Anytime Multi-agent Path Finding via Machine Learning-guided Large Neighborhood Search[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2022: 9368-9376. |
| [9] | Li Jiaoyang, Tinka A, Kiesel S, et al. Lifelong Multi-agent Path Finding in Large-scale Warehouses[C]//Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2020: 1898-1900. |
| [10] | Phan T, Phan Timy, Koenig S. Generative Curricula for Multi-agent Path Finding via Unsupervised and Reinforcement Learning[J]. Journal of Artificial Intelligence Research, 2025, 82: 2471-2534. |
| [11] | Sturtevant N R. Benchmarks for Grid-based Pathfinding[J]. IEEE Transactions on Computational Intelligence and AI in Games, 2012, 4(2): 144-148. |
| [12] | Gebser Martin, Obermeier Philipp, Otto Thomas, et al. Experimenting with Robotic Intra-logistics Domains[J]. Theory and Practice of Logic Programming, 2018, 18(3/4): 502-519. |
| [13] | Skrynnik Alexey, Andreychuk Anton, Borzilov Anatolii, et al. POGEMA: A Benchmark Platform for Cooperative Multi-agent Pathfinding[EB/OL]. (2025-04-08) [2025-04-16]. . |
| [14] | Gul Faiza, Mir Adnan, Mir Imran, et al. A Centralized Strategy for Multi-agent Exploration[J]. IEEE Access, 2022, 10: 126871-126884. |
| [15] | Kantamneni A, Brown L E, Parker G, et al. Survey of Multi-agent Systems for Microgrid Control[J]. Engineering Applications of Artificial Intelligence, 2015, 45: 192-203. |
| [16] | Li Yang, Cui Rongxin, Yang Chenguang, et al. Multi-robot Path Planning Based on the Developed RRT* Algorithm[C]//Proceedings of the 32nd Chinese Control Conference. Piscataway: IEEE, 2013: 7049-7053. |
| [17] | Verbari Paolo, Bascetta Luca, Prandini Maria. Multi-agent Trajectory Planning: A Decentralized Iterative Algorithm Based on Single-agent Dynamic RRT*[C]//2019 American Control Conference (ACC). Piscataway: IEEE, 2019: 1977-1982. |
| [18] | Agachi C, Arvin F, Hu Junyan. RRT*-based Leader-follower Trajectory Planning and Tracking in Multi-agent Systems[C]//2024 IEEE 12th International Conference on Intelligent Systems (IS). Piscataway: IEEE, 2024: 1-6. |
| [19] | Jiang Jinmingwu, Wu Kaigui. Cooperative Pathfinding Based on Memory-efficient Multi-agent RRT*[J]. IEEE Access, 2020, 8: 168743-168750. |
| [20] | Zhu Yiwen, Hu Jiawei, Xiong Zhenhua. Multi-agent Formation Maintaining RRT* (MFM-RRT*) Considering Formation Maintenance[C]//2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM). Piscataway: IEEE, 2024: 1518-1523. |
| [21] | Li Qingze, Hua Yongzhao, Zhai Haoran, et al. Multi-agent Weapon Target Assignment and Cooperative Path Planning Based on QS-RRT Algorithm[C]//2022 41st Chinese Control Conference (CCC). Piscataway: IEEE, 2022: 4909-4914. |
| [22] | Li Weimin, Wang Lei, Zou Awei, et al. Path Planning for UAV Based on Improved PRM[J]. Energies, 2022, 15(19): 7267. |
| [23] | Jin Qingeng, Hu Qingwu, Zhao Pengcheng, et al. An Improved Probabilistic Roadmap Planning Method for Safe Indoor Flights of Unmanned Aerial Vehicles[J]. Drones, 2023, 7(2): 92. |
| [24] | Koval Anton, Sina Sharif Mansouri, Nikolakopoulos George. Multi-agent Collaborative Path Planning Based on Staying Alive Policy[J]. Robotics, 2020, 9(4): 101. |
| [25] | Huang Chaochun, Du Bin, Chen Mou. Multi-UAV Cooperative Online Searching Based on Voronoi Diagrams[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(3): 3038-3049. |
| [26] | Goldenberg Meir, Felner Ariel, Sturtevant N, et al. Optimal-generation Variants of EPEA*[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2013: 89-97. |
| [27] | Goldenberg Meir, Felner Ariel, Stern Roni, et al. Enhanced Partial Expansion A*[J]. Journal of Artificial Intelligence Research, 2014, 50(1): 141-187. |
| [28] | Bnaya Zahy, Felner Ariel. Conflict-oriented Windowed Hierarchical Cooperative A*[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2014: 3743-3748. |
| [29] | Votion J, Cao Yongcan. Diversity-based Cooperative Multivehicle Path Planning for Risk Management in Costmap Environments[J]. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6117-6127. |
| [30] | Yao Jiyu, Longhui Gang. Ship Collaborative Path Planning Method Based on CS-STHA[J]. Journal of Marine Science and Engineering, 2022, 10(10): 1504. |
| [31] | Liu Yiming, Chen Mengxia, Huang Hejiao. Multi-agent Pathfinding Based on Improved Cooperative A* in Kiva System[C]//2019 5th International Conference on Control, Automation and Robotics (ICCAR). Piscataway: IEEE, 2019: 633-638. |
| [32] | Gibson J, Schuler T, McGuire L, et al. Swarm and Multi-agent Time-based A* Path Planning for Lighter-than-air Systems[J]. Unmanned Systems, 2020, 8(3): 253-260. |
| [33] | 张凯翔, 毛剑琳, 向凤红, 等. 基于讨价还价博弈机制的B-IHCA*多机器人路径规划算法[J]. 自动化学报, 2023, 49(7): 1483-1497. |
| Zhang Kaixiang, Mao Jianlin, Xiang Fenghong, et al. B-IHCA*, a Bargaining Game Based Multi-agent Path Finding Algorithm[J]. Acta Automatica Sinica, 2023, 49(7): 1483-1497. | |
| [34] | Vokřínek Jiří, Komenda Antonín, Pěchouček Michal. Cooperative Agent Navigation in Partially Unknown Urban Environments[C]//Proceedings of the 3rd International Symposium on Practical Cognitive Agents and Robots. New York: ACM, 2010: 41-48. |
| [35] | Scheffe Patrick, V A Pedrosa Matheus, Flaßkamp Kathrin, et al. Receding Horizon Control Using Graph Search for Multi-agent Trajectory Planning[J]. IEEE Transactions on Control Systems Technology, 2023, 31(3): 1092-1105. |
| [36] | Yan Zhongxia, Zheng Han, Wu C. Multi-agent Path Finding for Cooperative Autonomous Driving[C]//2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2024: 12361-12367. |
| [37] | Chen Kai, Qu Qingjun, Zhu Feng, et al. CPLNS: Cooperative Parallel Large Neighborhood Search for Large-scale Multi-agent Path Finding[J]. IEEE Transactions on Parallel and Distributed Systems, 2024, 35(11): 2069-2086. |
| [38] | Ren Zhongqiang, Zhang Chaoran, Rathinam S, et al. Search Algorithms for Multi-agent Teamwise Cooperative Path Finding[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2023: 1407-1413. |
| [39] | Ren Zhongqiang, Cai Yilin, Wang Hesheng. Multi-agent Teamwise Cooperative Path Finding and Traffic Intersection Coordination[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2024: 7990-7995. |
| [40] | Okumura K. Improving Lacam for Scalable Eventually Optimal Multi-agent Pathfinding[C]//Proceedings of the Thirty-second International Joint Conference on Artificial Intelligence. California: IJCAI, 2023: 243-251. |
| [41] | Okumura K. Engineering LaCAM*: Towards Real-time, Large-scale, and Near-optimal Multi-agent Pathfinding[C]//Proceedings of the 23rd International Conference on Autonomous Agents and Multiagent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2024: 1501-1509. |
| [42] | Liang Runzhe, Veerapaneni R, Harabor Daniel, et al. Real-time LaCAM for Real-time MAPF[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2025: 196-200. |
| [43] | Zhang Xiaotong, Xiong Gang, Wang Yuanjing, et al. D-PBS: Dueling Priority-based Search for Multiple Nonholonomic Robots Motion Planning in Congested Environments[J]. IEEE Robotics and Automation Letters, 2024, 9(7): 6288-6295. |
| [44] | Chan S H, Stern Roni, Felner Ariel, et al. Greedy Priority-based Search for Suboptimal Multi-agent Path Finding[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2023: 11-19. |
| [45] | Pallin Martin, Rashid Jayedur, Ögren Petter. A Decentralized Asynchronous Collaborative Genetic Algorithm for Heterogeneous Multi-agent Search and Rescue Problems[C]//2021 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Piscataway: IEEE, 2021: 1-8. |
| [46] | Biswas Sumana, Anavatti Sreenatha G, Garratt Matthew A. Particle Swarm Optimization Based Co-operative Task Assignment and Path Planning for Multi-agent System[C]//2017 IEEE Symposium Series on Computational Intelligence (SSCI). Piscataway: IEEE, 2017: 1-6. |
| [47] | Biswas Sumana, Anavatti Sreenatha G, Garratt Matthew A. A Time-efficient Co-operative Path Planning Model Combined with Task Assignment for Multi-agent Systems[J]. Robotics, 2019, 8(2): 35. |
| [48] | Zuo Jiankai, Chen Jiatong, Tan Yaxin, et al. A Multi-agent Collaborative Work Planning Strategy Based on AFSA-PSO Algorithm[C]//2019 International Conference on Robots & Intelligent System (ICRIS). Piscataway: IEEE, 2019: 254-257. |
| [49] | Cai Yifan, Yang S X. An Improved PSO-based Approach with Dynamic Parameter Tuning for Cooperative Target Searching of Multi-robots[C]//2014 World Automation Congress (WAC). Piscataway: IEEE, 2014: 616-621. |
| [50] | Cai Yifan, Yang S X. An Improved PSO-based Approach with Dynamic Parameter Tuning for Cooperative Multi-robot Target Searching in Complex Unknown Environments[J]. International Journal of Control, 2013, 86(10): 1720-1732. |
| [51] | Lhoussaine Ait Ben Mouh, Baslam Mohamed, Ouhda Mohamed, et al. Ant Trajectory Planning with Multi-agents Collaboration and Computer Vision[C]//International Conference on Advanced Intelligent Systems for Sustainable Development (AI2SD'2023). Cham: Springer Nature Switzerland, 2024: 83-91. |
| [52] | Xie Qian, Chen Weiyi, Zhuang Yumu. Research on Task Planning and Efficiency Evaluation of Multi-agent Collaborative Search Based on Ant Colony Optimization[C]//2023 3rd International Signal Processing, Communications and Engineering Management Conference (ISPCEM). Piscataway: IEEE, 2023: 302-307. |
| [53] | 吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2021, 47(4): 814-827. |
| Wu Ao, Yang Rennong, Liang Xiaolong, et al. Cooperative Search Algorithm Based on Pheromone Decision for UAV Swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 814-827. | |
| [54] | Gharrad Hana, Jabeur Nafaa, Ansar Ul-Haque Yasar, et al. A Five-step Drone Collaborative Planning Approach for the Management of Distributed Spatial Events and Vehicle Notification Using Multi-agent Systems and Firefly Algorithms[J]. Computer Networks, 2021, 198: 108282. |
| [55] | Yang Fan, Li Sheng, Chen Chen. Multi-robot Cooperative Search Method Based on Biological Heuristic Algorithm[C]//2021 China Automation Congress (CAC). Piscataway: IEEE, 2021: 642-646. |
| [56] | Chen Bo, Zhang Hui, Zhang Fangfang, et al. DIBNN: A Dual-improved-BNN Based Algorithm for Multi-robot Cooperative Area Search in Complex Obstacle Environments[J]. IEEE Transactions on Automation Science and Engineering, 2025, 22: 2361-2374. |
| [57] | Mohammed El Habib Souidi, Toufik Messaoud Maarouk, Ledmi Abdeldjalil. Multi-agent Ludo Game Collaborative Path Planning Based on Markov Decision Process[C]//Inventive Systems and Control. Singapore: Springer Singapore, 2021: 37-51. |
| [58] | Megherbi D B, Kim M. A Collaborative Distributed Multi-agent Reinforcement Learning Technique for Dynamic Agent Shortest Path Planning Via Selected Sub-goals in Complex Cluttered Environments[C]//2015 IEEE International Multi-Disciplinary Conference on Cognitive Methods in Situation Awareness and Decision. Piscataway: IEEE, 2015: 118-124. |
| [59] | Lamini Chaymaa, Fathi Youssef, Benhlima Said. Collaborative Q-learning Path Planning for Autonomous Robots Based on Holonic Multi-agent System[C]//2015 10th International Conference on Intelligent Systems: Theories and Applications (SITA). Piscataway: IEEE, 2015: 1-6. |
| [60] | Huang Beinuo, Chen Xin, Sun Yipu, et al. Multi-agent Cooperative Strategy Learning Method Based on Transfer Learning[C]//2022 13th Asian Control Conference (ASCC). Piscataway: IEEE, 2022: 1095-1100. |
| [61] | Wang Zilu, Liu Lin, Jiangtao Lü. Multi-UAV Cooperative Exploration Route Planning Based on Reinforcement Learning[C]//2024 6th International Conference on Electronic Engineering and Informatics (EEI). Piscataway: IEEE, 2024: 1436-1441. |
| [62] | Lu Maikao, Ge Mingfeng, Ding Tengfei, et al. SDF-based Reinforcement Learning for Adaptive Path Planning and Formation Control of Multiagent Systems[J]. IEEE Internet of Things Journal, 2025, 12(12): 19944-19954. |
| [63] | Xiao Ziren, Li Peisong, Liu Chang, et al. MACNS: A Generic Graph Neural Network Integrated Deep Reinforcement Learning Based Multi-agent Collaborative Navigation System for Dynamic Trajectory Planning[J]. Information Fusion, 2024, 105: 102250. |
| [64] | Poudel Sabitri, Moh Sangman. Priority-aware Task Assignment and Path Planning for Efficient and Load-balanced multi-UAV Operation[J]. Vehicular Communications, 2023, 42: 100633. |
| [65] | Zhao Xiaoru, Yang Rennong, Zhong Liangsheng, et al. Multi-UAV Path Planning and Following Based on Multi-agent Reinforcement Learning[J]. Drones, 2024, 8(1): 18. |
| [66] | Shang Zhihao, Mao Zhiqiang, Zhang Huachao, et al. Collaborative Path Planning of Multiple Carrier-based Aircraft Based on Multi-agent Reinforcement Learning[C]//2022 23rd IEEE International Conference on Mobile Data Management (MDM). Piscataway: IEEE, 2022: 512-517. |
| [67] | Murata Kazuhi, Miyazaki Kenta, Matsunaga Nobutomo. Experiment of Cooperative Transportation Using Multi-robots by Multi-agent Deep Deterministic Policy Gradient[C]//2022 13th Asian Control Conference (ASCC). Piscataway: IEEE, 2022: 1120-1123. |
| [68] | Liu Qi, Gao Jianqi, Zhu Dongjie, et al. Multi-agent Target Assignment and Path Finding for Intelligent Warehouse: A Cooperative Multi-agent Deep Reinforcement Learning Perspective[EB/OL]. (2024-10-27) [2025-04-25]. . |
| [69] | Shen Hang, Li Xiang, Wang Yan, et al. Collaborative Path Penetration in 5G-IoT Networks: A Multi-agent Deep Reinforcement Learning Approach[J]. Peer-to-Peer Networking and Applications, 2025, 18(3): 113. |
| [70] | Liu Ping, Ma Xiangyu, Ding Jie, et al. Multi-agent Collaborative Path Planning Algorithm with Reinforcement Learning and Combined Prioritized Experience Replay in Internet of Things[J]. Computers and Electrical Engineering, 2024, 116: 109193. |
| [71] | 司鹏搏, 吴兵, 杨睿哲, 等. 基于多智能体深度强化学习的无人机路径规划[J]. 北京工业大学学报, 2023, 49(4): 449-458. |
| Si Pengbo, Wu Bing, Yang Ruizhe, et al. UAV Path Planning Based on Multi-agent Deep Reinforcement Learning[J]. Journal of Beijing University of Technology, 2023, 49(4): 449-458. | |
| [72] | Lu Siyao, Xu Rui, Li Zhaoyu, et al. Lunar Rover Collaborated Path Planning with Artificial Potential Field-based Heuristic on Deep Reinforcement Learning[J]. Aerospace, 2024, 11(4): 253. |
| [73] | Li Qingbiao, Gama F, Ribeiro A, et al. Graph Neural Networks for Decentralized Multi-robot Path Planning[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2020: 11785-11792. |
| [74] | Dai Hanqi, Lu Weining, Yang Jun, et al. Cooperative Path Planning of Multi-agent Based on Graph Neural Network[C]//2022 34th Chinese Control and Decision Conference (CCDC). Piscataway: IEEE, 2022: 5620-5624. |
| [75] | Luo Tianze, Subagdja Budhitama, Wang Di, et al. Multi-agent Collaborative Exploration through Graph-based Deep Reinforcement Learning[C]//2019 IEEE International Conference on Agents (ICA). Piscataway: IEEE, 2019: 2-7. |
| [76] | Wang Weizheng, Mao Le, Wang Ruiqi, et al. Multi-robot Cooperative Socially-aware Navigation Using Multi-agent Reinforcement Learning[C]//2024 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2024: 12353-12360. |
| [77] | Parada L, Yu K, Angeloudis P. IntNet: A Communication-driven Multi-agent Reinforcement Learning Framework for Cooperative Autonomous Driving[J]. IEEE Robotics and Automation Letters, 2025, 10(3): 2478-2485. |
| [78] | Li Qingbiao, Lin Weizhe, Liu Zhe, et al. Message-aware Graph Attention Networks for Large-scale Multi-robot Path Planning[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5533-5540. |
| [79] | Ma Ziyuan, Luo Yudong, Ma Hang. Distributed Heuristic Multi-agent Path Finding with Communication[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 8699-8705. |
| [80] | Sartoretti G, Kerr J, Shi Yunfei, et al. PRIMAL: Pathfinding via Reinforcement and Imitation Multi-agent Learning[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2378-2385. |
| [81] | Luo Zhiyao, Sartoretti Guillaume. Deep Reinforcement Learning Based Multi-agent Pathfinding[EB/OL]. [2025-05-18].. |
| [82] | Damani Mehul, Luo Zhiyao, Wenzel Emerson, et al. PRIMAL2: Pathfinding Via Reinforcement and Imitation Multi-agent Learning-lifelong[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2666-2673. |
| [83] | Liu Jiaming, Zheng Zhi. A Path Planning Method Based on Collaborative Learning for Multi-robot with Connectivity and Obstacle Avoidance Constraints[C]//2022 China Automation Congress (CAC). Piscataway: IEEE, 2022: 6770-6775. |
| [1] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [2] | Li Jiting, Sun Yi, Wang Yirong, Lin Yiqin, Jia Jun, Ding Gangsong. LLM-driven Multi-agent Social Network Simulation: Interdisciplinary Integration and Cutting-edge Development [J]. Journal of System Simulation, 2026, 38(2): 235-260. |
| [3] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [4] | Wang Yifan, Yang Bin, Wang Congjun. Simulation Method for Multi-crew Construction Processes Based on Large Language Model-powered Agent [J]. Journal of System Simulation, 2026, 38(2): 488-500. |
| [5] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [6] | Zhang Yue, Zhang Wenliang, Feng Qiang, Guo Xing, Ren Yi, Wang Zili. Combat-oriented Comprehensive Simulation and Verification Technology for Equipment System RMS [J]. Journal of System Simulation, 2025, 37(7): 1823-1835. |
| [7] | Gu Xueqiang, Luo Junren, Zhou Yanzhong, Zhang Wanpeng. Survey on Large Language Agent Technologies for Intelligent Game Theoretic Decision-making [J]. Journal of System Simulation, 2025, 37(5): 1142-1157. |
| [8] | Yao Changhua, Bi Shanning, Ma Rufei, Yu Xiaohan, Li Jiaqiang, Chen Jinli. Method for Dynamic Coalition Formation of Wargame Agent for Force Cooperation [J]. Journal of System Simulation, 2025, 37(5): 1188-1196. |
| [9] | Huang Zhiqin, Lu Tianying, Chen Zheyi. Multi-UAV Deployment and Collaborative Offloading for Large-scale IoT Systems [J]. Journal of System Simulation, 2025, 37(1): 25-39. |
| [10] | Jiang Quan, Wei Jingxuan. Real-time Scheduling Method for Dynamic Flexible Job Shop Scheduling [J]. Journal of System Simulation, 2024, 36(7): 1609-1620. |
| [11] | Yu Lei, Zhu Xichou, Liao Huaming, Guo Jiafeng, Cheng Xueqi. Interaction Between Virus Transmission Variation and Population Crossover Activity and Diffusion Model [J]. Journal of System Simulation, 2024, 36(7): 1713-1728. |
| [12] | Zhou Zhiyong, Mo Fei, Zhao Kai, Hao Yunbo, Qian Yufeng. Adaptive PID Control Algorithm Based on PPO [J]. Journal of System Simulation, 2024, 36(6): 1425-1432. |
| [13] | Yan Xingyu, Li Dayan, Wang Niya, Zhang Kaixiang, Mao Jianlin. Multi-agent Path Planning with Obstacle Penalty Factor [J]. Journal of System Simulation, 2024, 36(3): 673-685. |
| [14] | Zhang Guohui, Gao Ang, Zhang Ya'nan. Combat Effectiveness Evaluation Method of Homogeneous Cluster Equipment System Based on RLoMAG+EAS [J]. Journal of System Simulation, 2024, 36(1): 160-169. |
| [15] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
