

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (10): 2265-2276.doi: 10.16182/j.issn1004731x.joss.23-0638
• Papers • Previous Articles Next Articles
Ma Zongfang, Zhang Linxuan, Song Lin, Wang Jia
Received:2023-05-28
Revised:2023-08-01
Online:2024-10-15
Published:2024-10-18
Contact:
Zhang Linxuan
CLC Number:
Ma Zongfang, Zhang Linxuan, Song Lin, Wang Jia. Garage AGV Path Planning and Simulation Based on Improved DWA[J]. Journal of System Simulation, 2024, 36(10): 2265-2276.
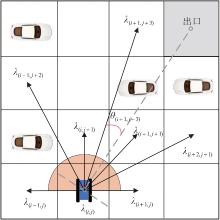
Fig. 1
Directional pheromone
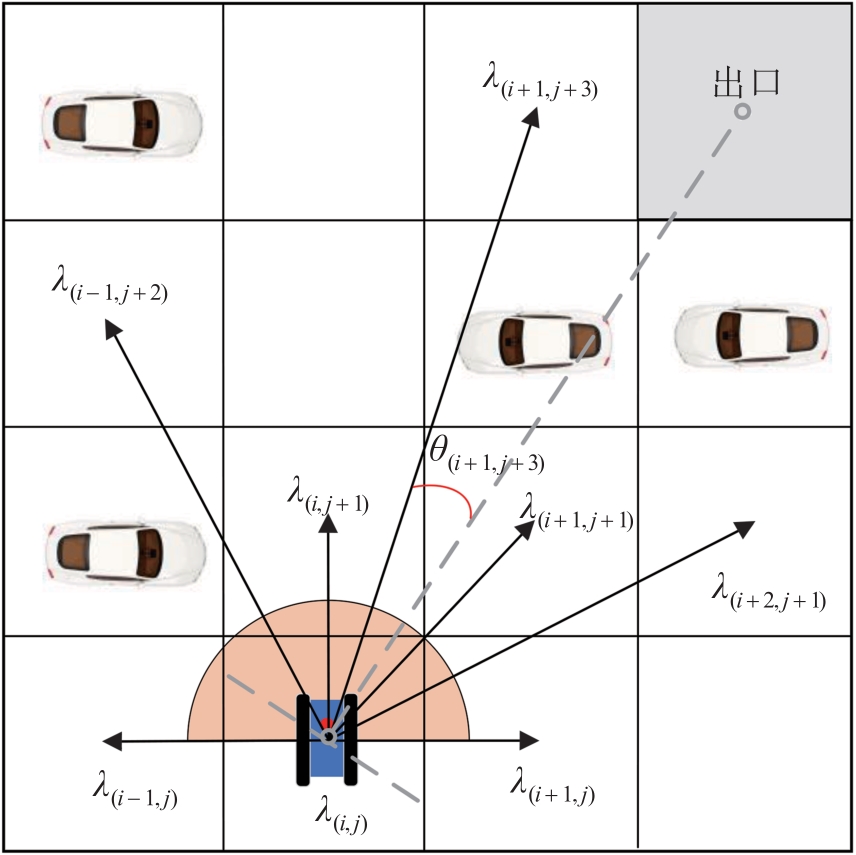
Table 1
Improved ant colony parameter setting
| 主要参数 | 量值 | 主要参数 | 量值 |
|---|---|---|---|
| 蚂蚁个数m | 50 | 信息素挥发系数 | 0.5 |
| 最大迭代次数N | 200 | 信息素强度Q | 50 |
| 信息素启发因子 | 1.1 | 信息素上限 | 0.9 |
| 信息素启发因子 | 20 | 信息素下限 | 0.1 |

Fig. 2
Simulation results of 3 algorithms
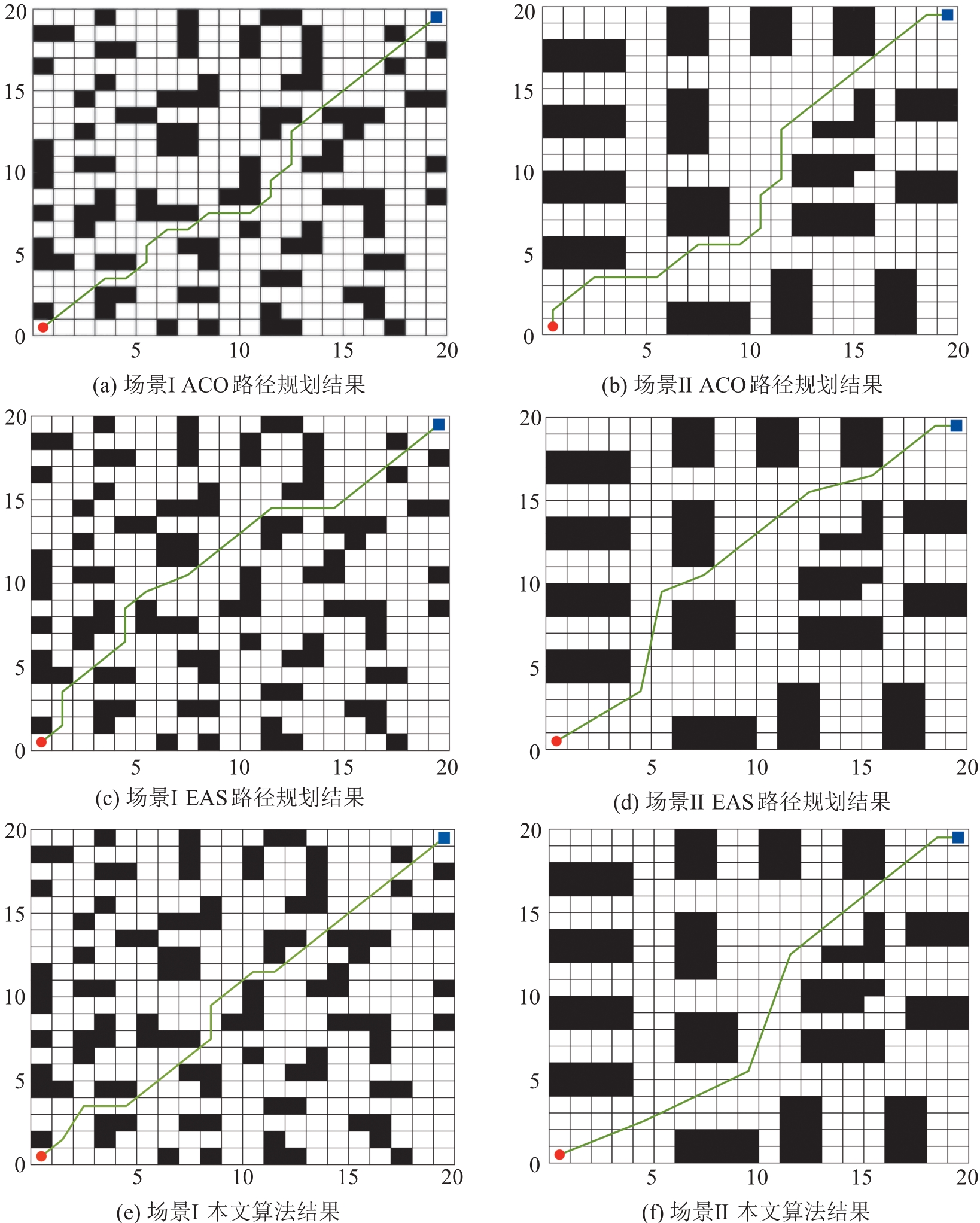
Table 2
Comparison of experimental results of global path planning
| 栅格地图 | 算法 | 最优路径长度/m | 迭代次数 | 拐点数 |
|---|---|---|---|---|
| 场景Ⅰ | ACO | 31.627 | 120 | 12 |
| EAS | 29.799 | 89 | 8 | |
| 本文算法 | 28.035 | 56 | 7 | |
| 场景Ⅱ | ACO | 32.472 | 114 | 10 |
| EAS | 29.201 | 77 | 6 | |
| 本文算法 | 27.475 | 38 | 3 |
Fig. 3
Crawler robot model
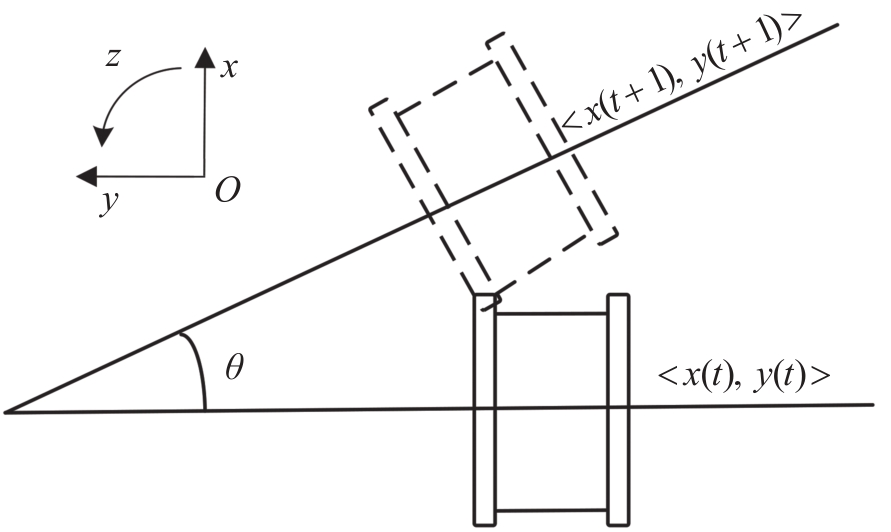
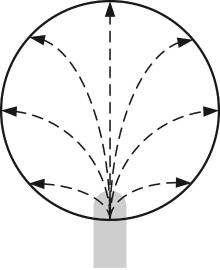
Fig. 4
Circle for limiting maximum distance
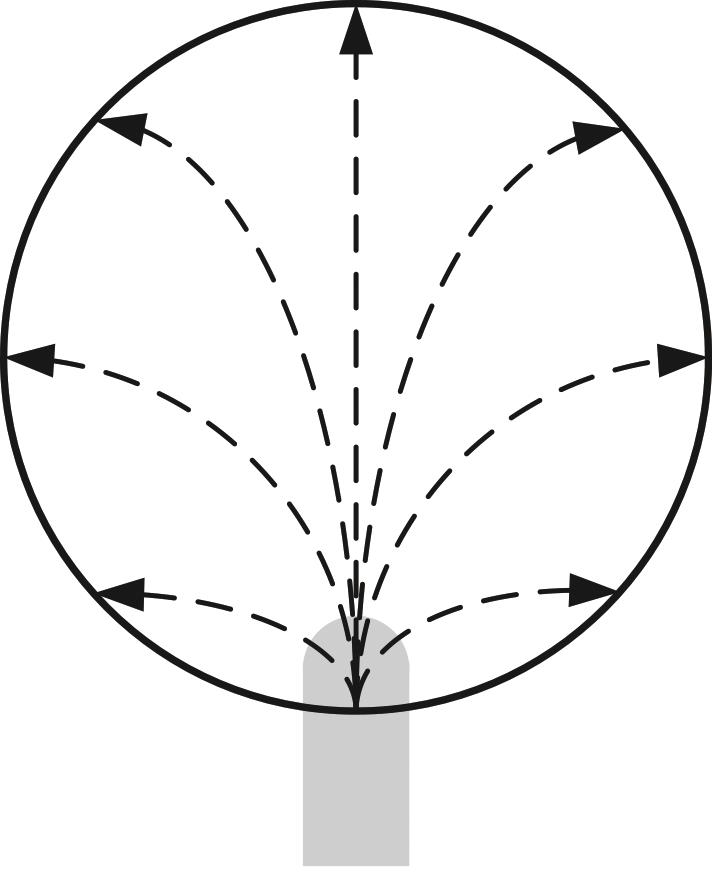
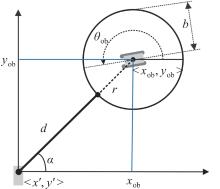
Fig. 5
Circular distance between robot and obstacle
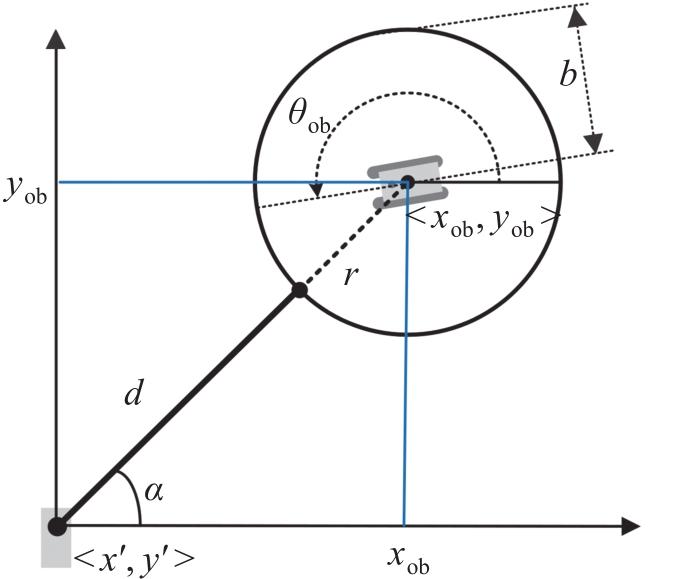
Fig. 6
Elliptical distance between robot and obstacle
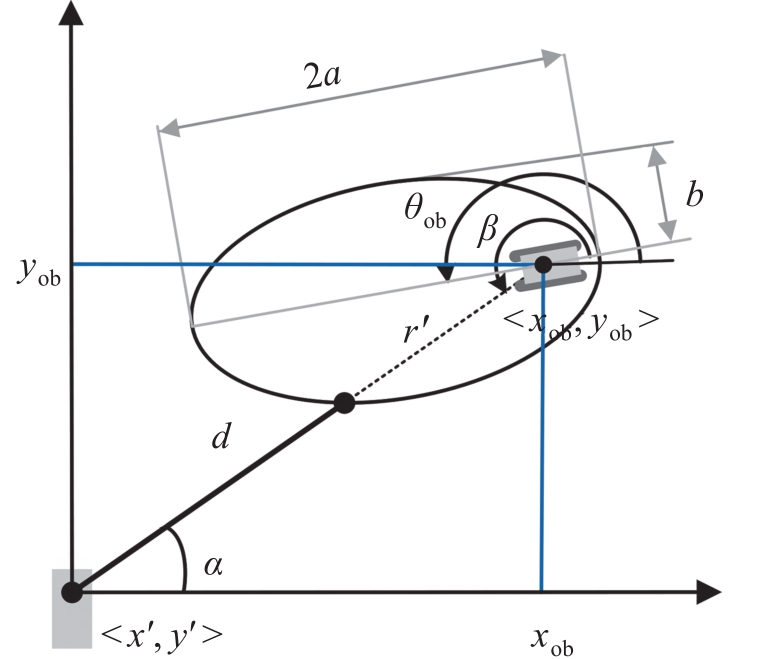
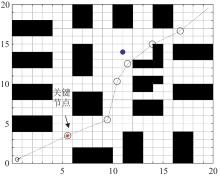
Fig. 7
Path key sub node selection
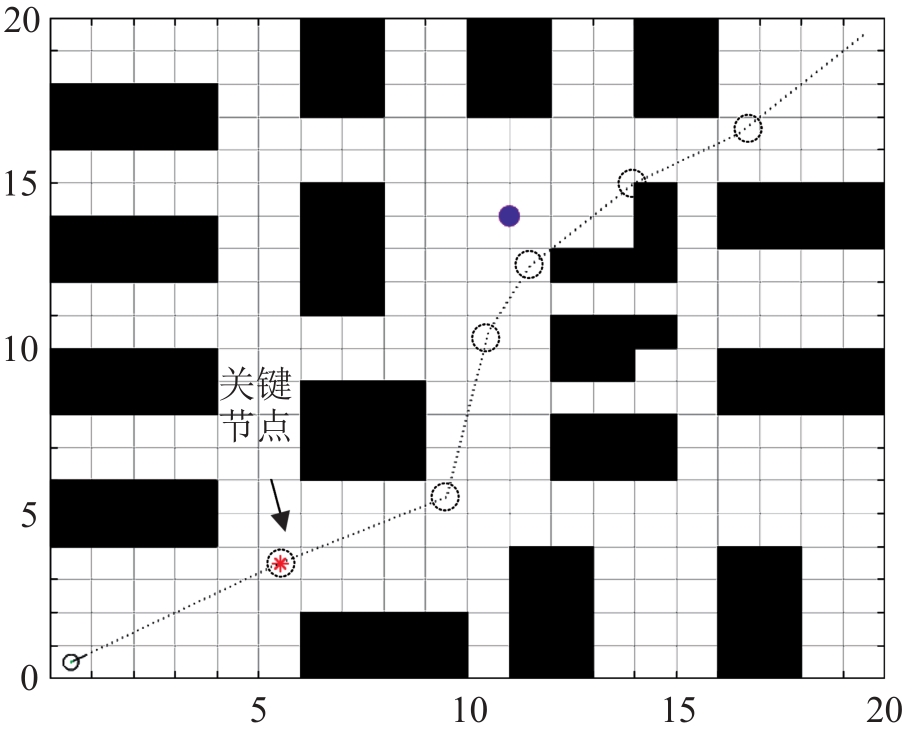
Table 3
Improve DWA parameter settings
| 主要参数 | 量值 |
|---|---|
| 最大线速度/(m/s) | 5 |
| 最大角速度/(rad/s) | 30 |
| 最大线加速度/(m/s2) | 0.5 |
| 最大角加速度/(rad/s2) | 60 |
| 线速度分辨率/(m/s) | 0.1 |
| 角速度分辨率/(rad/s) | 1 |
| 障碍物膨胀半径/m | 0.4 |
| 机器人半径/m | 0.5 |
| 时间分辨率/s | 0.1 |
Table 4
Speed space parameter setting
| 主要参数 | 量值 |
|---|---|
| 方位角评价系数 | 0.1 |
| 障碍物距离评价系数 | 0.2 |
| 速度评价系数 | 0.3 |
| 路径评价系数 | 0.2 |

Fig. 8
Simulation results of two local path planning algorithms
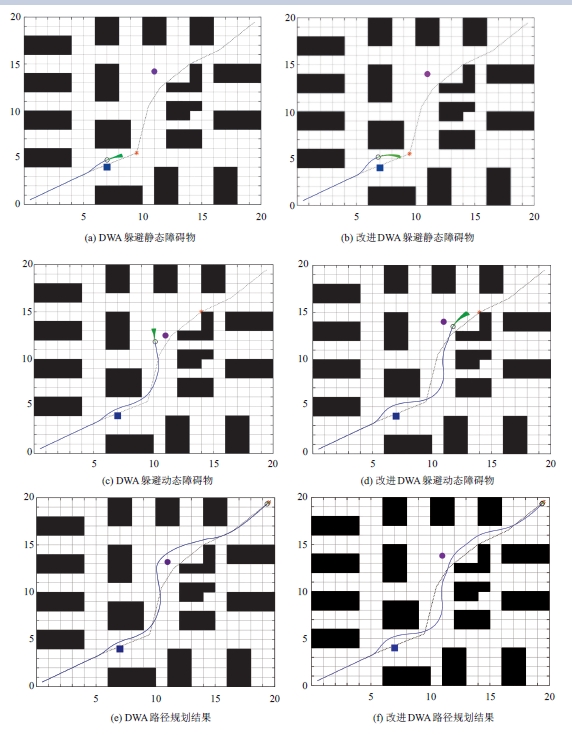
Fig. 9
Fusion algorithm flow
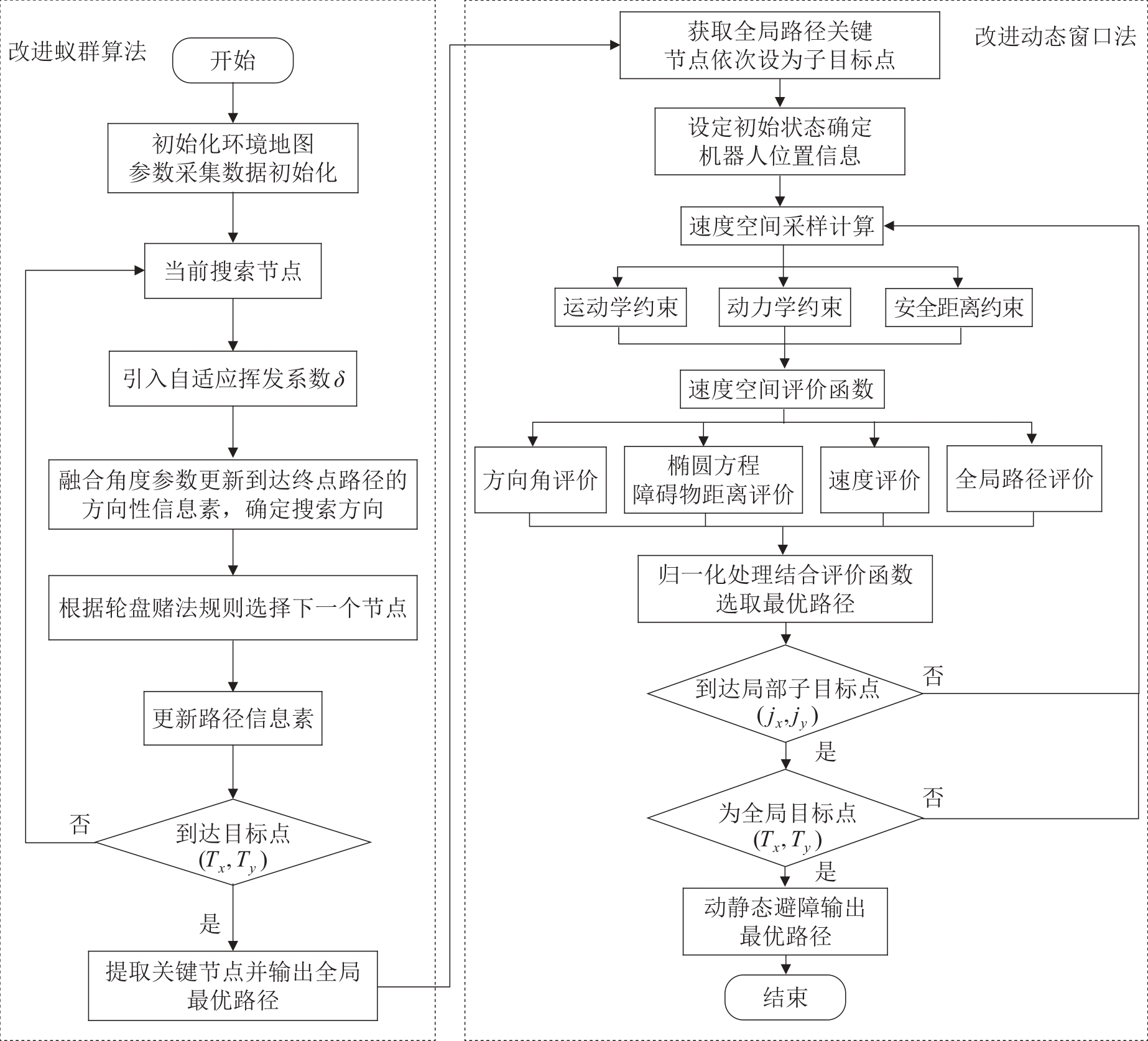
Table 5
Comparison of local path planning algorithms
| 局部规划算法 | 迭代次数 | 路径长度/m | 运行时间/s |
|---|---|---|---|
| 传统DWA | 574 | 31.601 | 128.465 |
| 改进DWA | 531 | 28.758 | 101.941 |
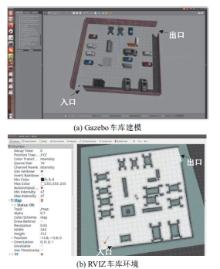
Fig. 10
Garage modeling environment
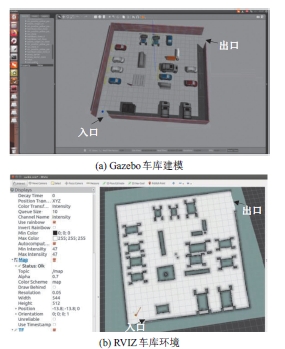

Fig. 11
Simulation results of traditional DWA algorithm
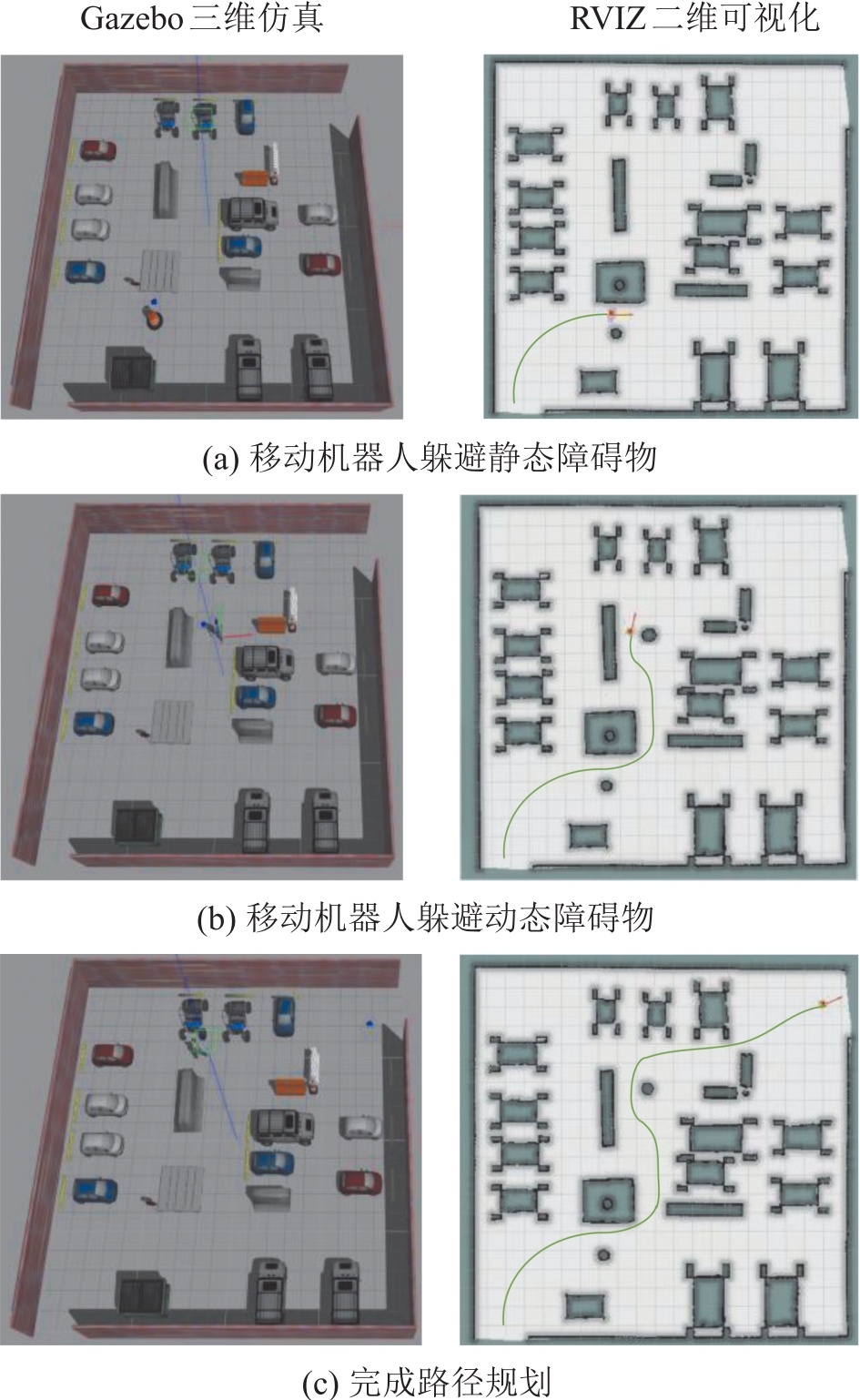
Fig.12
Simulation results of fusion algorithm
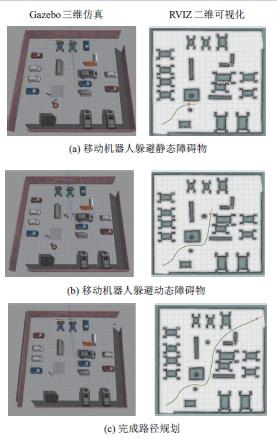
Table 6
Comparison of algorithm results in simulation environment
| 局部规划算法 | 路径长度/m | 运行时间/s |
|---|---|---|
| 传统DWA | 32.649 | 135.728 |
| 融合算法 | 28.435 | 106.271 |
| 1 | 梁军, 韩冬冬, 盘朝奉, 等. 基于移动机器人的智能车库关键技术综述[J]. 机械工程学报, 2022, 58(3): 1-20. |
| Liang Jun, Han Dongdong, Pan Zhaofeng, et al. Review on Critical Technologies of Robot-based Intelligent Garages[J]. Journal of Mechanical Engineering, 2022, 58(3): 1-20. | |
| 2 | 张明慧, 史小辉. 城市智慧停车解决方案及应用实例[J]. 物联网技术, 2020, 10(4): 36-40. |
| 3 | Lin Yucheng, Cheung W F. Developing WSN/BIM-based Environmental Monitoring Management System for Parking Garages in Smart Cities[J]. Journal of Management in Engineering, 2020, 36(3): 04020012. |
| 4 | 杨来义, 毕敬, 苑海涛. 基于SAC算法的移动机器人智能路径规划[J]. 系统仿真学报, 2023, 35(8): 1726-1736. |
| Yang Laiyi, Bi Jing, Yuan Haitao. Intelligent Path Planning for Mobile Robots Based on SAC Algorithm[J]. Journal of System Simulation, 2023, 35(8): 1726-1736. | |
| 5 | AL-Taharwa Ismail, Sheta Alaa, Al-Weshah Mohammed. A Mobile Robot Path Planning Using Genetic Algorithm in Static Environment[J]. Journal of Computer Science, 2008, 4(4): 341-344. |
| 6 | Rashid Razif, Perumal N, Elamvazuthi I, et al. Mobile Robot Path Planning Using Ant Colony Optimization[C]//2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA). Piscataway: IEEE, 2016: 1-6. |
| 7 | Martin C Santiago Robert, Anton Louise De Ocampo, Ubando Aristotle T, et al. Path Planning for Mobile Robots Using Genetic Algorithm and Probabilistic Roadmap[C]//2017 IEEE 9th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM). Piscataway: IEEE, 2017: 1-5. |
| 8 | 陈志梅, 李敏, 邵雪卷, 等. 基于改进RRT算法的桥式起重机避障路径规划[J]. 系统仿真学报, 2021, 33(8): 1832-1838. |
| Chen Zhimei, Li Min, Shao Xuejuan, et al. Obstacle Avoidance Path Planning of Bridge Crane Based on Improved RRT Algorithm[J]. Journal of System Simulation, 2021, 33(8): 1832-1838. | |
| 9 | 王鹤静, 王丽娜. 机器人路径规划算法综述[J]. 桂林理工大学学报, 2023, 43(1): 137-147. |
| Wang Hejing, Wang Lina. Review of Path Planning for Robots[J]. Journal of Guilin University of Technology, 2023, 43(1): 137-147. | |
| 10 | Liu Yuecheng, Zhao Yongjia. A Virtual-waypoint Based Artificial Potential Field Method for UAV Path Planning[C]//2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC). Piscataway: IEEE, 2016: 949-953. |
| 11 | 郑维, 刘德垚, 王洪斌, 等. 三级缓冲区结合模糊逻辑的DWA及其应用[J]. 小型微型计算机系统, 2022, 43(8): 1615-1624. |
| Zheng Wei, Liu Deyao, Wang Hongbin, et al. DWA with Three-level Buffer and Fuzzy Logic and Its Application[J]. Journal of Chinese Computer Systems, 2022, 43(8): 1615-1624. | |
| 12 | Fox D, Burgard W, Thrun S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| 13 | Omer Ali Abubakr, Mohammed Abdel Kareem Jaradat, Mamoun Adel Hafez. A Reduced Cascaded Fuzzy Logic Controller for Dynamic Window Weights Optimization[C]//2018 11th International Symposium on Mechatronics and Its Applications (ISMA). Piscataway: IEEE, 2018: 1-4. |
| 14 | 魏立新, 张钰锟, 孙浩, 等. 基于改进蚁群和DWA算法的机器人动态路径规划[J]. 控制与决策, 2022, 37(9): 2211-2216. |
| Wei Lixin, Zhang Yukun, Sun Hao, et al. Robot Dynamic Path Planning Based on Improved Ant Colony and DWA Algorithm[J]. Control and Decision, 2022, 37(9): 2211-2216. | |
| 15 | 赵伟, 吴子英. 双层优化A*算法与动态窗口法的动态路径规划[J]. 计算机工程与应用, 2021, 57(22): 295-303. |
| Zhao Wei, Wu Ziying. Dynamic Path Planning Based on Bilevel Optimization A* Algorithm and Dynamic Window Method[J]. Computer Engineering and Applications, 2021, 57(22): 295-303. | |
| 16 | Chang Lu, Shan Liang, Jiang Chao, et al. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment[J]. Autonomous Robots, 2021, 45(1): 51-76. |
| 17 | Dai Jun, Li Dongfang, Zhao Junwei, et al. Autonomous Navigation of Robots Based on the Improved Informed-RRT* Algorithm and DWA[J]. Journal of Robotics, 2022, 2022: 3477265. |
| 18 | Xiquan Mai, Li Di, Ouyang Jian, et al. An Improved Dynamic Window Approach for Local Trajectory Planning in the Environment with Dense Objects[J]. Journal of Physics: Conference Series, 2021, 1884(1): 012003. |
| 19 | Wang Zhidong, Wu Changhong, Xu Jing, et al. Research on Path Planning of Cleaning Robot Based on an Improved Ant Colony Algorithm[C]//2020 2nd International Conference on Computer Science Communication and Network Security (CSCNS2020). Les Ulis: EDP Sciences, 2021: 07005. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
