

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (8): 1726-1736.doi: 10.16182/j.issn1004731x.joss.22-0412
•
Laiyi Yang1( ), Jing Bi1(), Haitao Yuan2
), Jing Bi1(), Haitao Yuan2
Received:2022-04-26
Revised:2022-10-08
Online:2023-08-25
Published:2023-08-15
Laiyi Yang, Jing Bi, Haitao Yuan. Intelligent Path Planning for Mobile Robots Based on SAC Algorithm[J]. Journal of System Simulation, 2023, 35(8): 1726-1736.
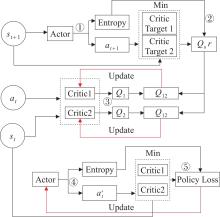
Fig. 1
Network structure of SAC algorithm
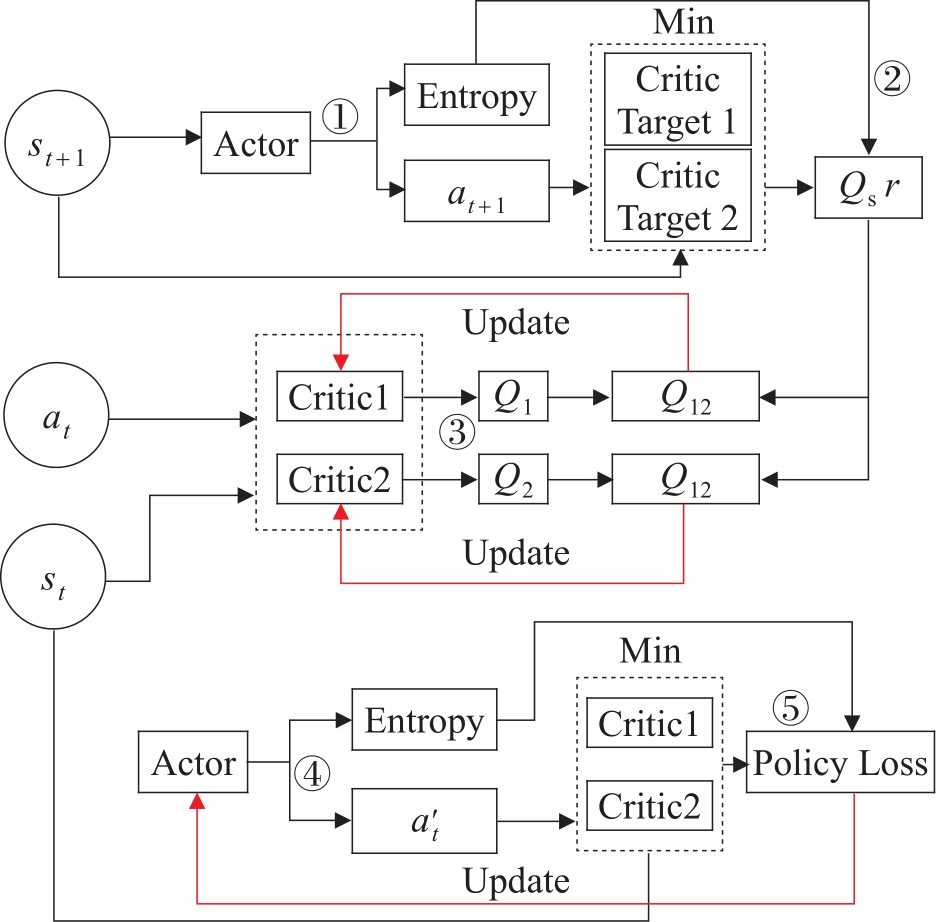
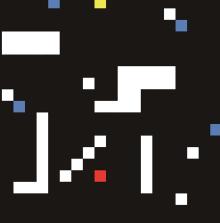
Fig. 2
Simulation environment

Table 1
SAC algorithm-related parameters
| 参数 | 取值 |
|---|---|
| 折扣因子 | 0.95 |
| 学习率 | 0.000 3 |
| 训练批次大小 | 256 |
| 每次迭代的步长 | 1 000 |
| 经验池大小 | 107 |
| 温度系数 | 0.005 |
| α初始值 | 1 |
| 梯度步数 | 1 |
| 探索函数 | 随机采样 |
Fig. 3
Maximum reward values for SAC and PPO
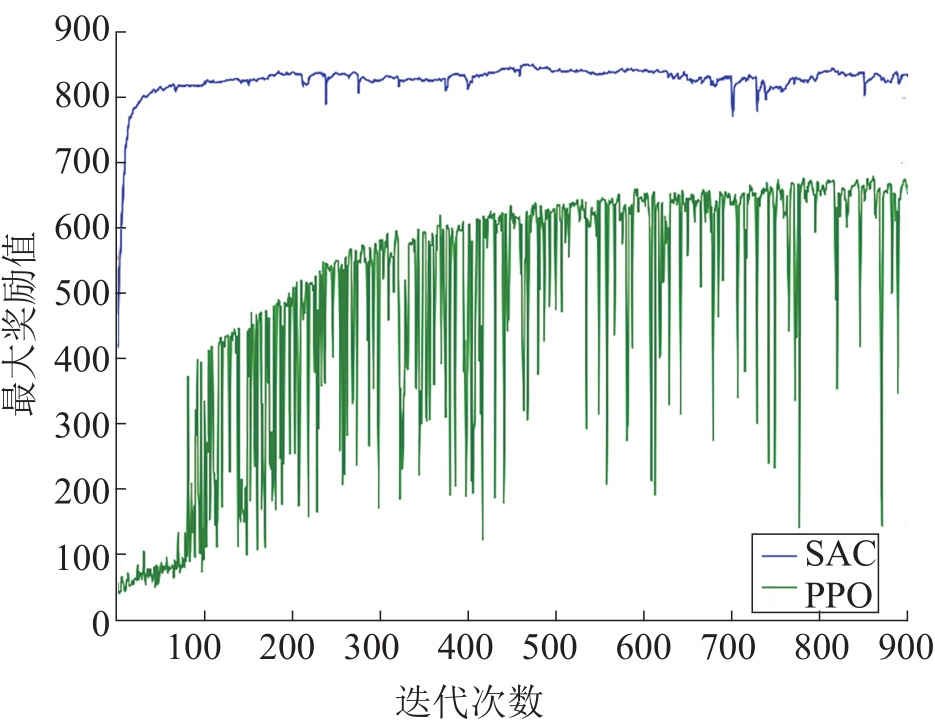
Fig. 4
Average reward values for SAC and PPO
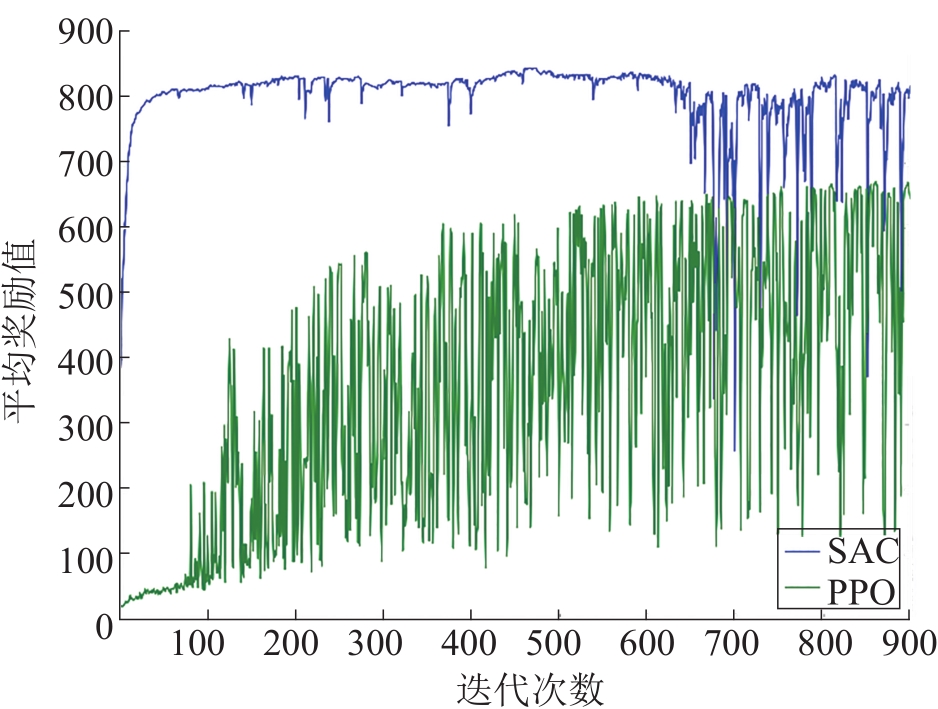
Fig. 5
Minimum reward values for SAC and PPO
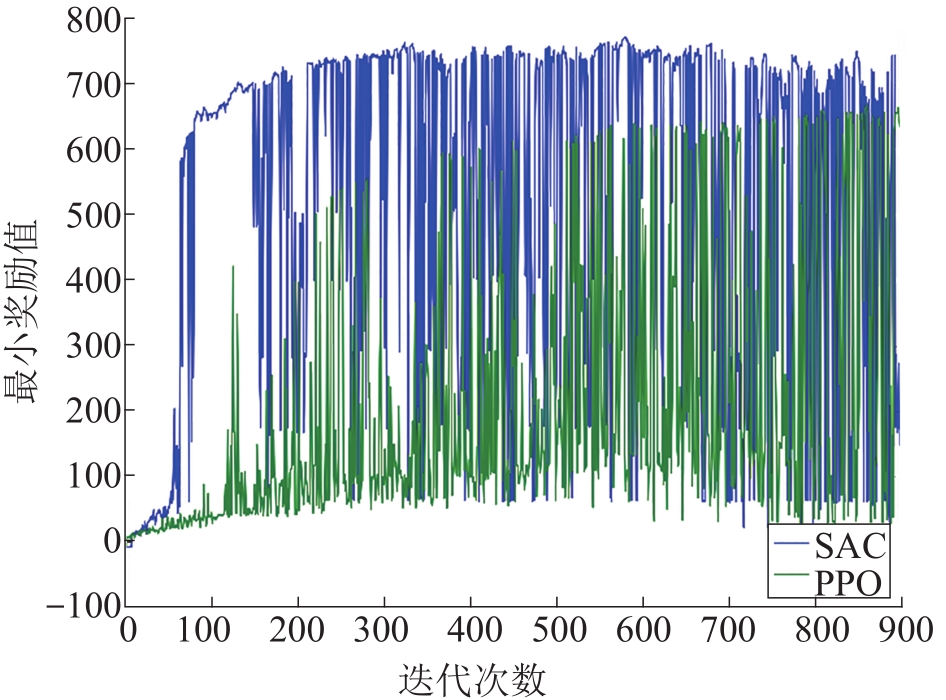
Fig. 6
Angles for SAC and PPO
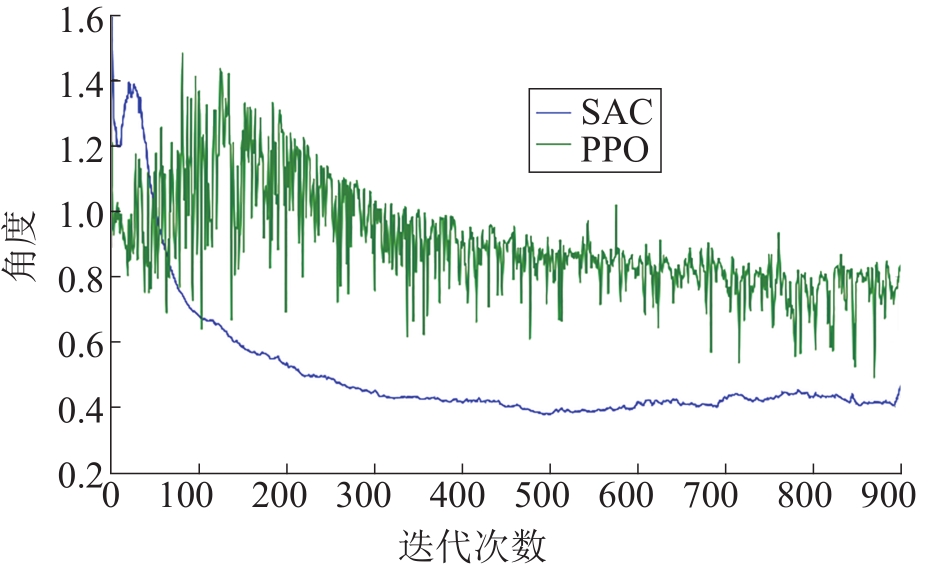
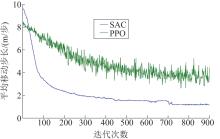
Fig. 7
Speeds for SAC and PPO
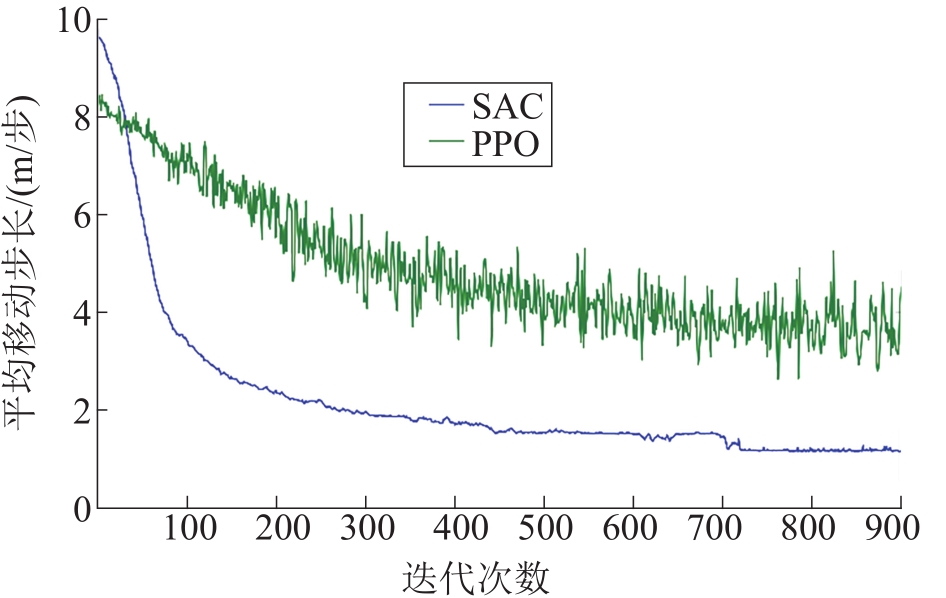
Fig. 8
Steps for SAC and PPO
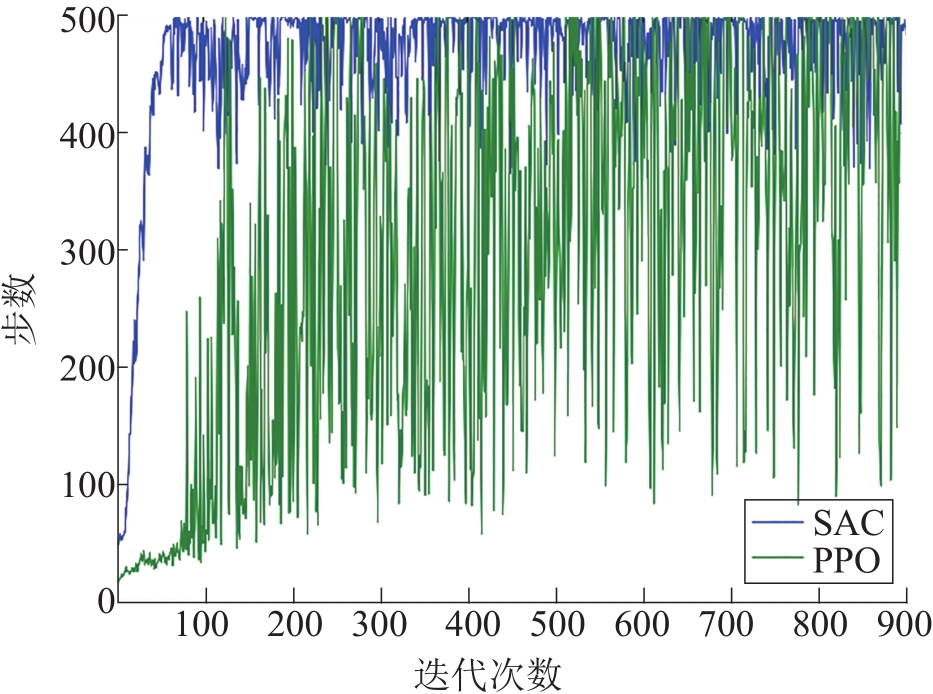
Table 2
Comparison of SAC and PPO results
| 指标 | SAC | PPO |
|---|---|---|
| 到达率/% | 94 | 71 |
| 平均步数 | 342.63 | 301.29 |
| 平均路径长度/m | 726.38 | 1072.93 |
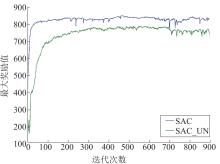
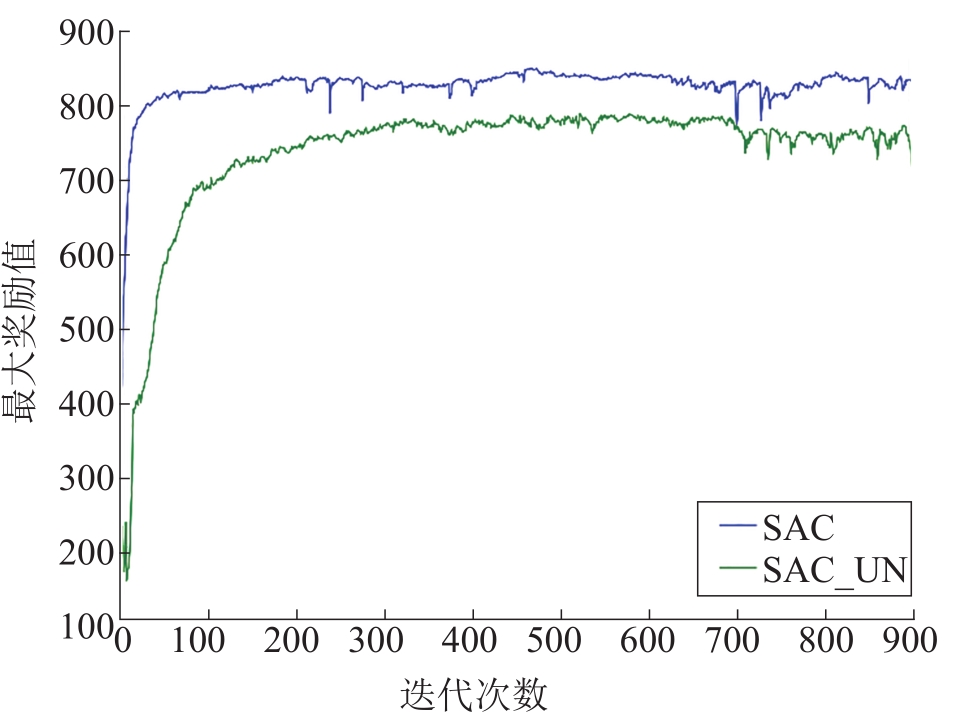
Fig. 9
Maximum reward values for SAC and SAC_UN
| 1 |
朱大奇, 颜明重. 移动机器人路径规划技术综述[J]. 控制与决策, 2010, 25(7): 961-967.
|
|
|
|
| 2 |
黄晓冬, 苑海涛, 毕敬, 等. 基于DQN的海战场舰船路径规划及仿真[J]. 系统仿真学报, 2021, 33(10): 2440-2448.
|
|
|
|
| 3 |
|
| 4 |
张捍东, 郑睿, 岑豫皖. 移动机器人路径规划技术的现状与展望[J]. 系统仿真学报, 2005, 17(2): 439-443.
|
|
|
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
邓学强. 基于改进人工势场法的移动机器人路径规划[J]. 山东理工大学学报(自然科学版), 2014, 28(1): 38-41.
|
|
|
|
| 9 |
|
| 10 |
|
| 11 |
乔俊飞, 侯占军, 阮晓钢. 基于神经网络的强化学习在避障中的应用[J]. 清华大学学报(自然科学版), 2008, 48(增2): 1747-1750.
|
|
|
|
| 12 |
刘建伟, 高峰, 罗雄麟. 基于值函数和策略梯度的深度强化学习综述[J]. 计算机学报, 2019, 42(6): 1406-1438.
|
|
|
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
陶重犇, 雷祝兵, 李春光, 等. 基于改进模拟退火算法的搬运机器人路径规划[J]. 计算机测量与控制, 2018, 26(7): 182-185.
|
|
|
|
| 17 |
|
| 18 |
蒙盾, 胡卓, 张华军. 基于改进A*算法的多层邮轮疏散系统仿真[J]. 系统仿真学报, 2022, 34(6): 1375-1382.
|
|
|
|
| 19 |
徐力, 刘云华, 王启富. 自适应遗传算法在机器人路径规划的应用[J]. 计算机工程与应用, 2020, 56(18): 36-41.
|
|
|
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
罗阳阳, 彭晓燕. 基于改进PSO的四轮移动机器人全局路径规划[J]. 计算机仿真, 2020, 37(7): 373-379.
|
|
|
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
|
| 31 |
|
| 32 |
|
| 33 |
|
| 34 |
|
| 35 |
何柳柳, 杨羊, 李征, 等. 面向持续集成测试优化的强化学习奖励机制[J]. 软件学报, 2019, 30(5): 1438-1449.
|
|
|
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [8] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [9] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [10] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [11] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [12] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [13] | Chen Zhen, Wu Zhuoyi, Zhang Lin. Research on Policy Representation in Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(7): 1753-1769. |
| [14] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [15] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
