

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (8): 1635-1650.doi: 10.16182/j.issn1004731x.joss.23-0480
•
Tanaka Satoshi
Received:2023-04-22
Revised:2023-06-29
Online:2023-08-25
Published:2023-08-15
About author: |
| |
Tanaka Satoshi. Application of 3D Scanned Big Data of Large-scale Cultural Heritage Objects Based on Noise-robust Transparent Visualization[J]. Journal of System Simulation, 2023, 35(8): 1635-1650.

Fig. 1
3D scanning of Tamaki Shrine in Nara, Japan, by using a digital camera and a UAV


Fig. 2
Transparent visualization of festival float, Hachiman-yama, in the Gion Festival in Kyoto, Japan

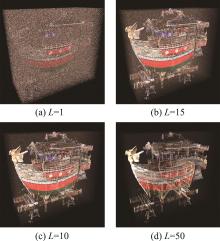
Fig. 3
Experiment demonstrating noise transparentization (1): Artificially added intense random noise disappears rapidly as the number of point subgroups, L, increases
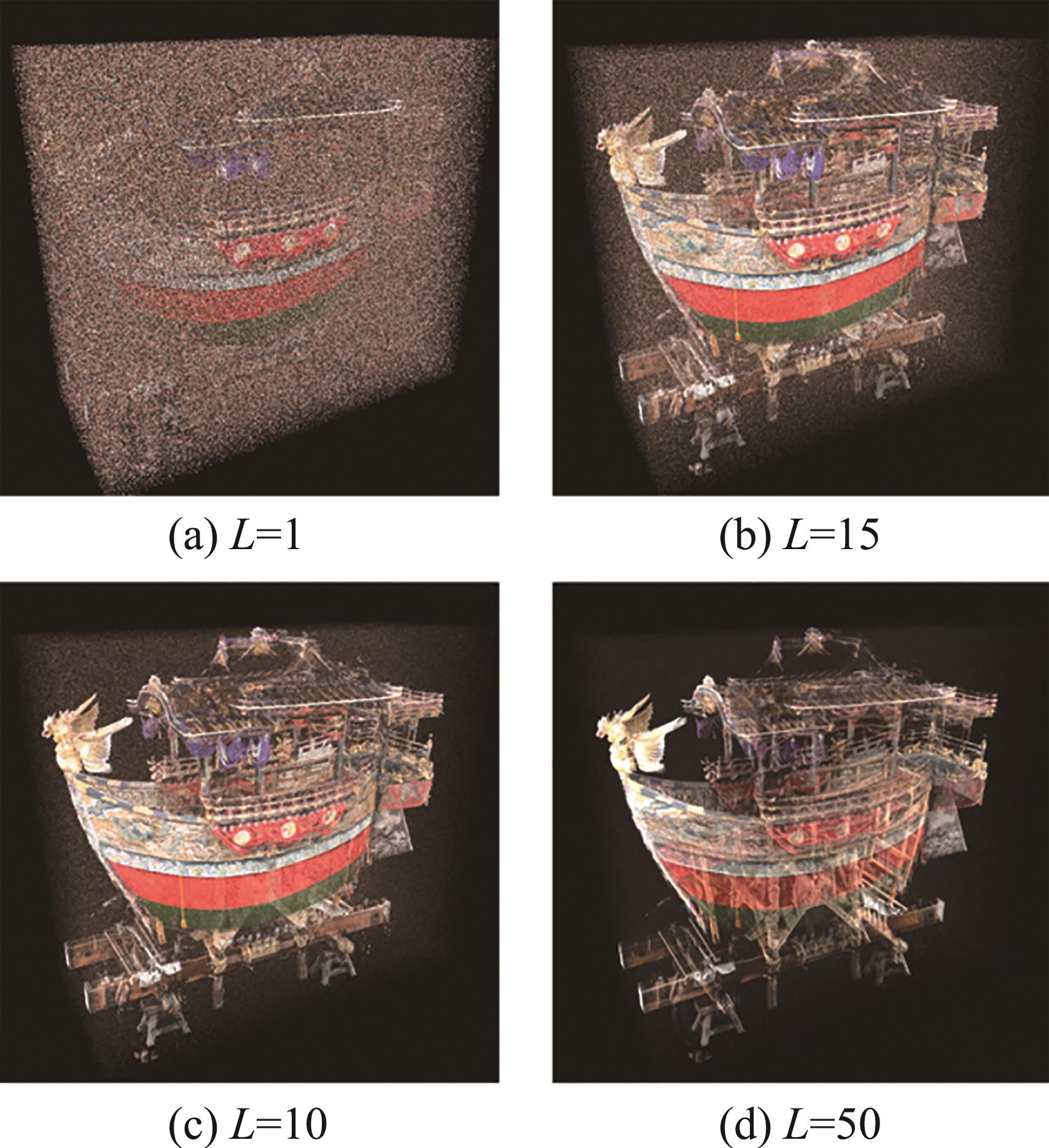

Fig. 4
Experiment demonstrating noise transparentization (2): Unprocessed 3D scanned data of the forest in the Fujimori Shrine, Kyoto, Japan are used
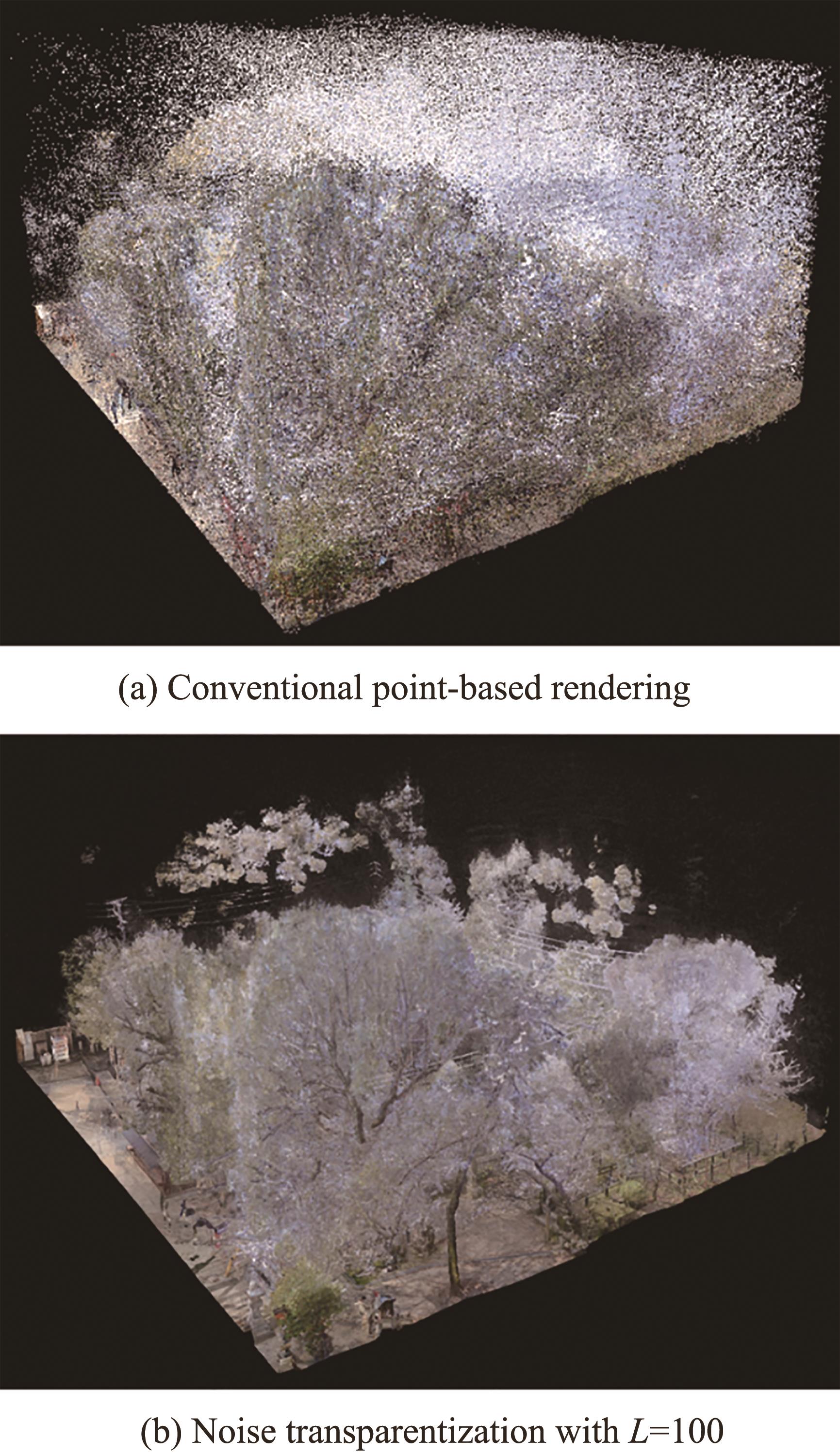

Fig. 5
Borobudur Temple in Indonesia

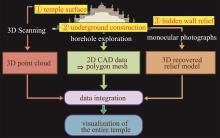
Fig. 6
Principle of digital archiving and visualization of Borobudur Temple
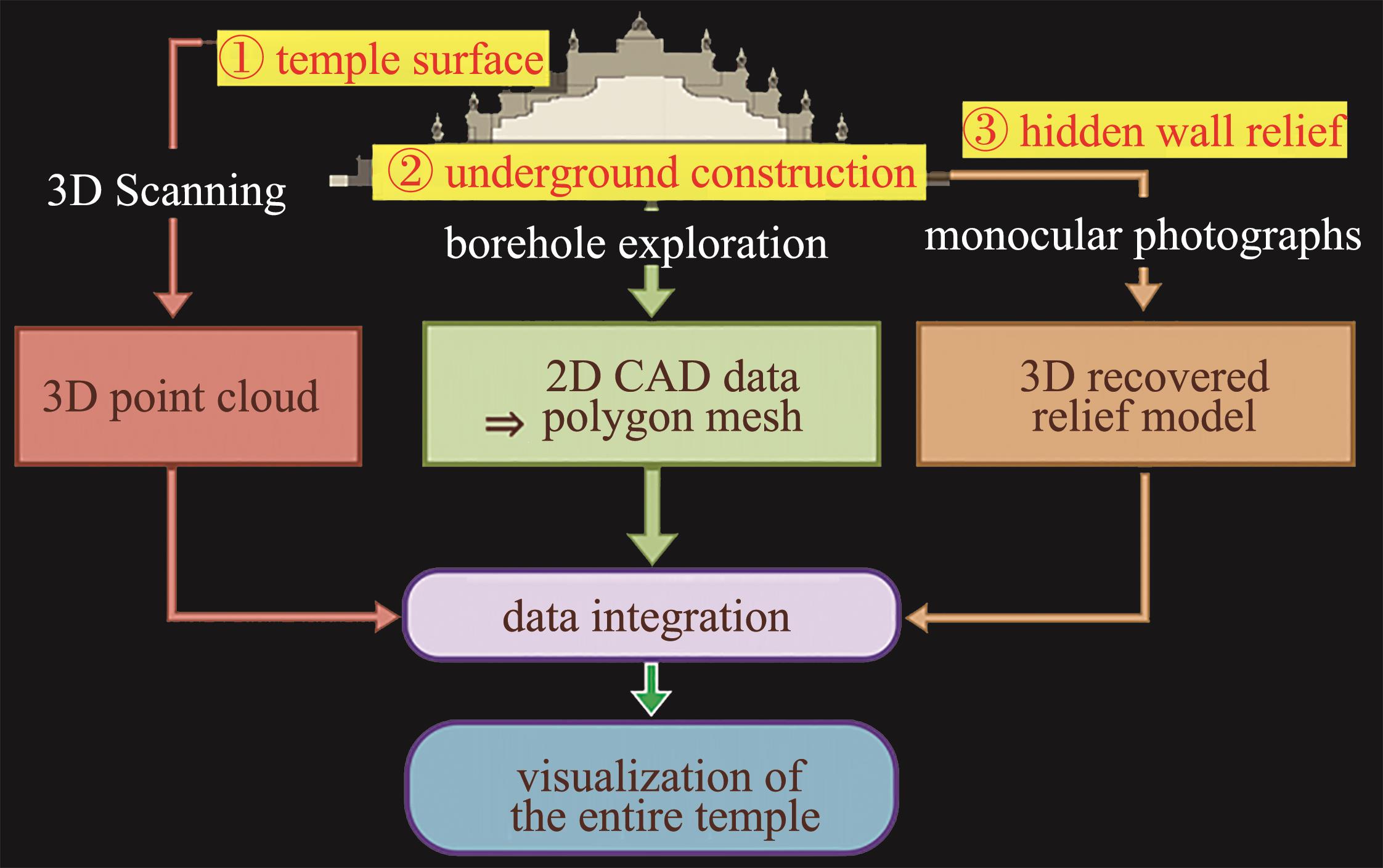
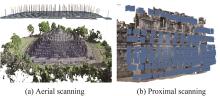
Fig. 7
Camera positions used for photogrammetric scanning
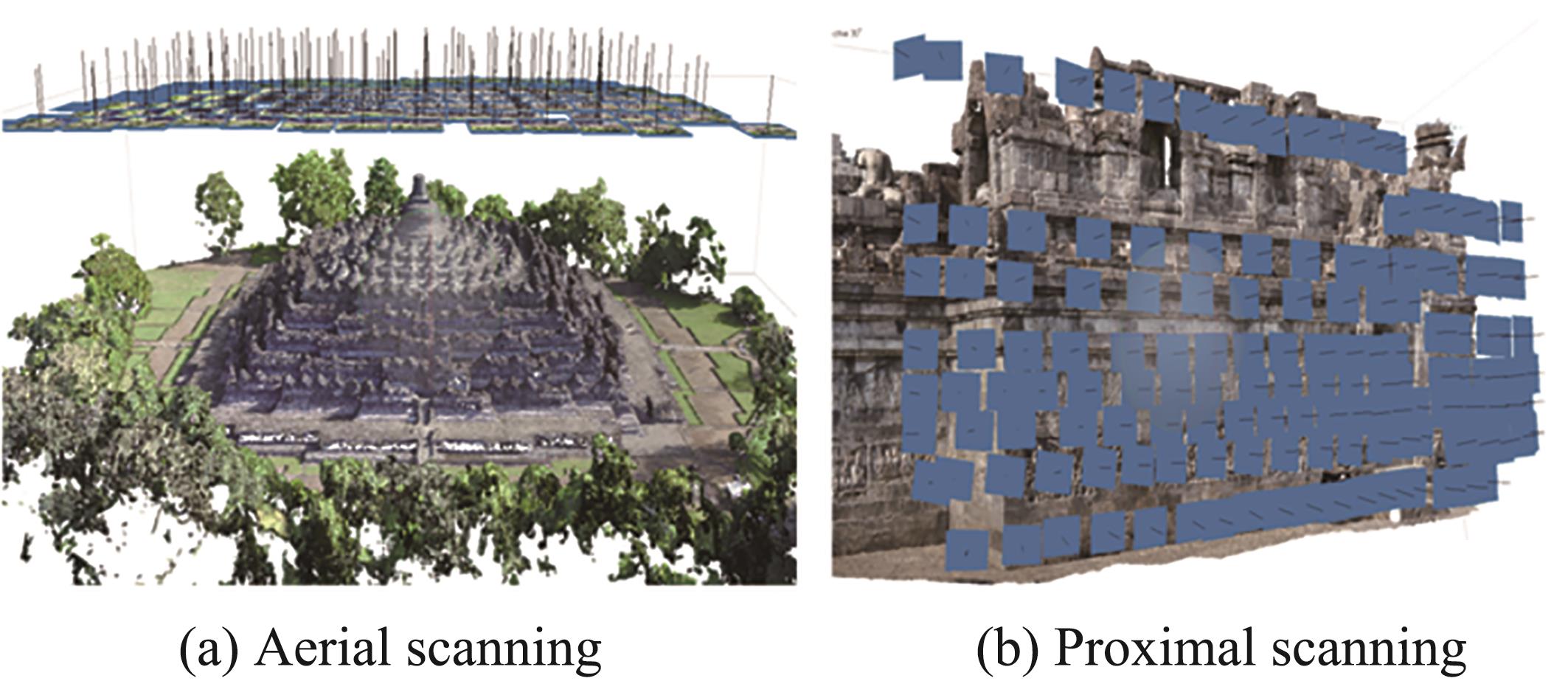

Fig. 8
Relief exposed to the exterior at the southeast corner of the hidden base (Karmavibhangga)
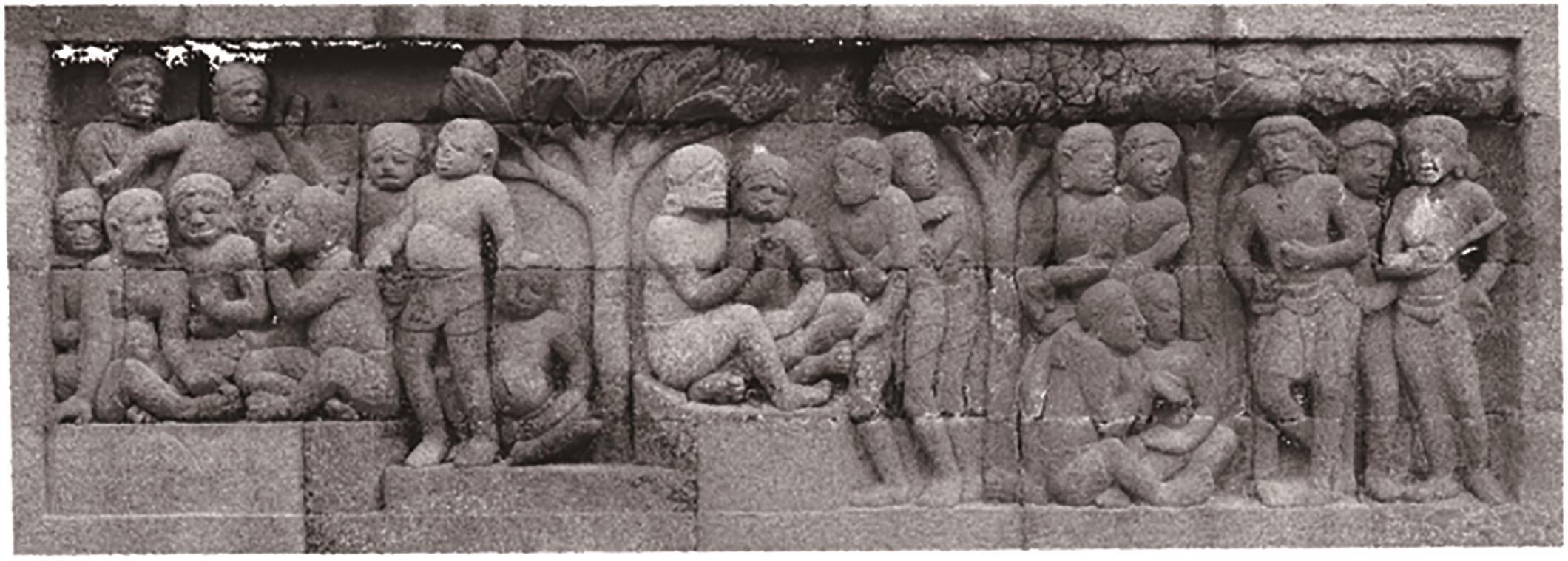
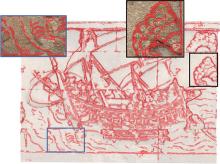
Fig. 9
Edge-highlighting visualization of a wall relief depicting an ancient ship
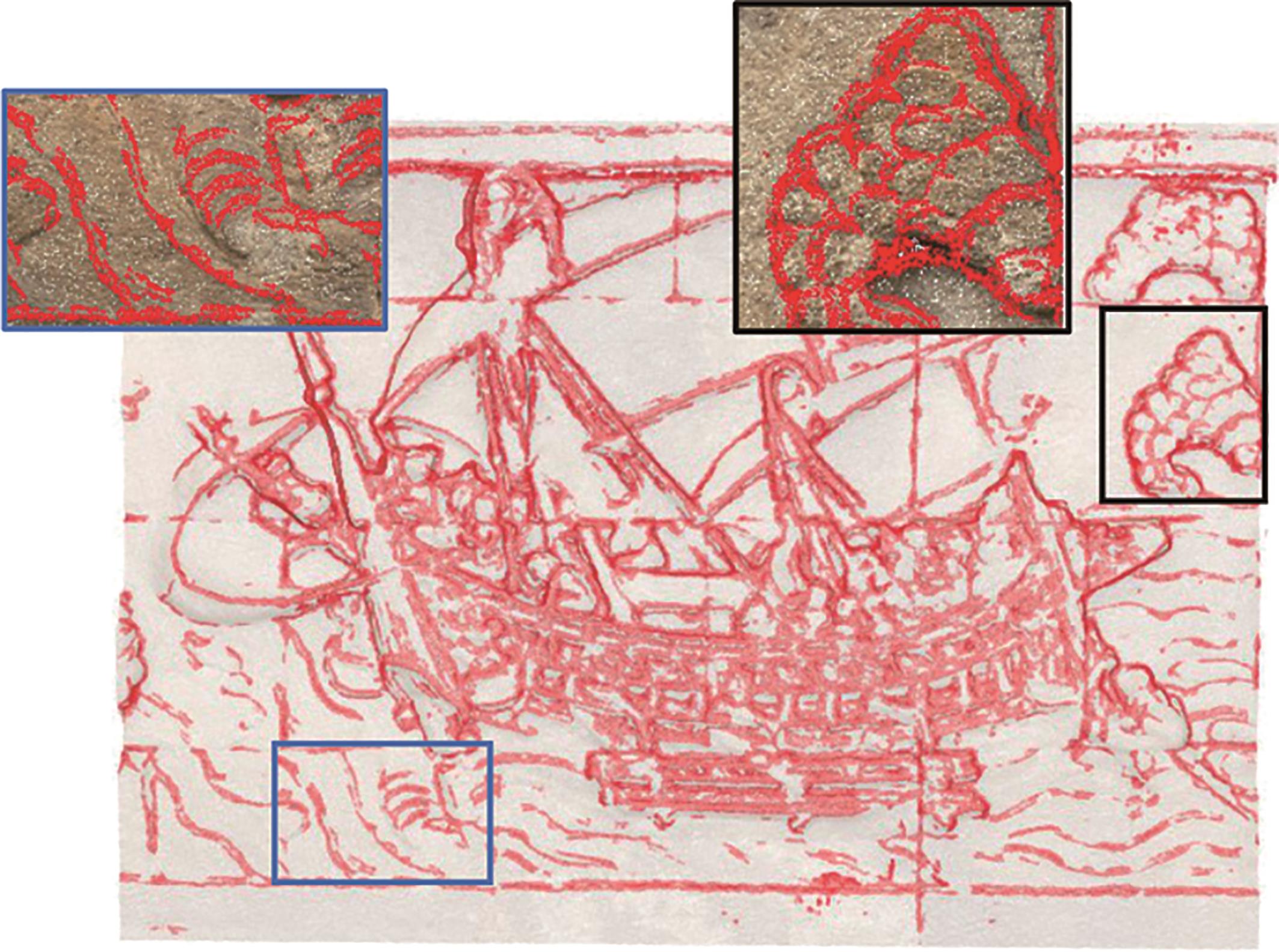

Fig. 10
Cross-sectional drawing of the underground foundation construction area (based on 2D CAD data)[19]
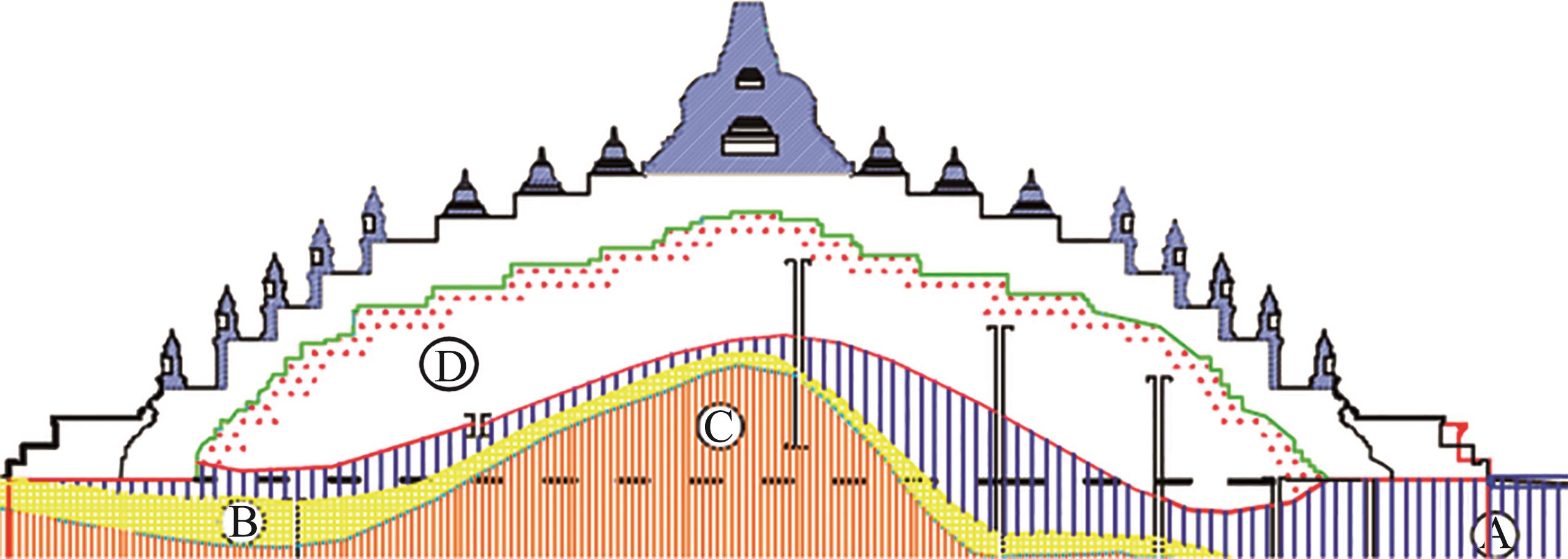
Fig. 11
Transparent fused visualization of the four embankment layers in the underground foundation construction area
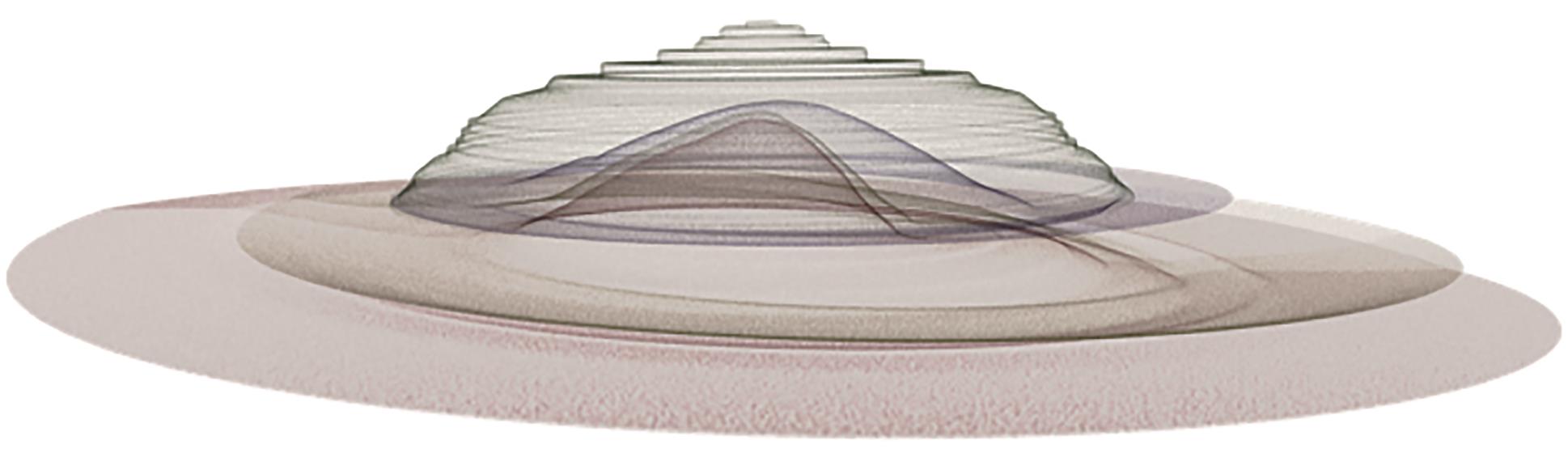

Fig. 12
Karmavibhangga reliefs on the first stratum above ground which are made visible for visitors
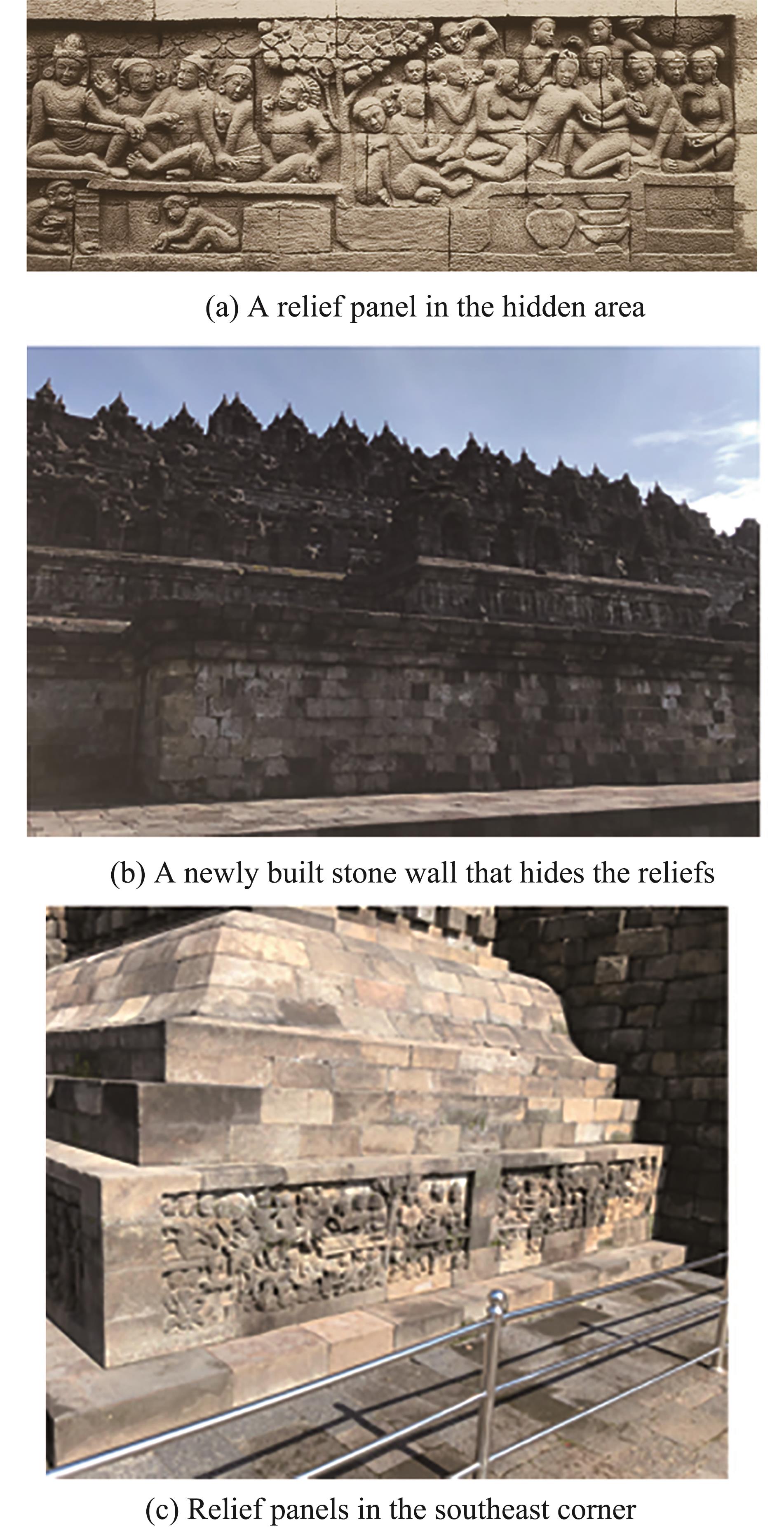
Fig. 13
3D restoration of hidden wall reliefs from old photographs
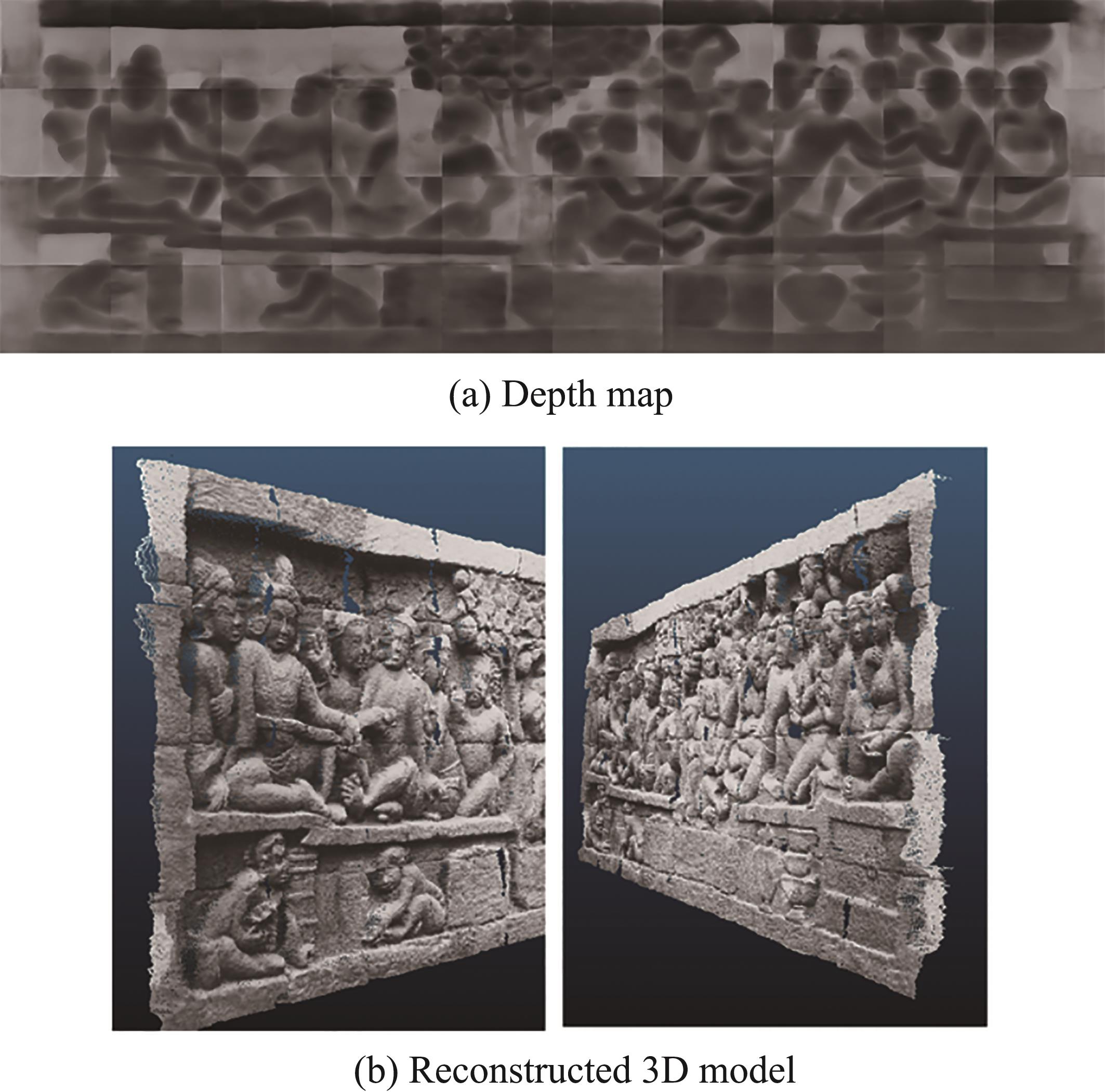
Fig. 14
Transparent visualization of the entire Borobudur Temple: multi-data-source visualization executed by integrating the temple surface, underground foundation construction area, and hidden wall reliefs
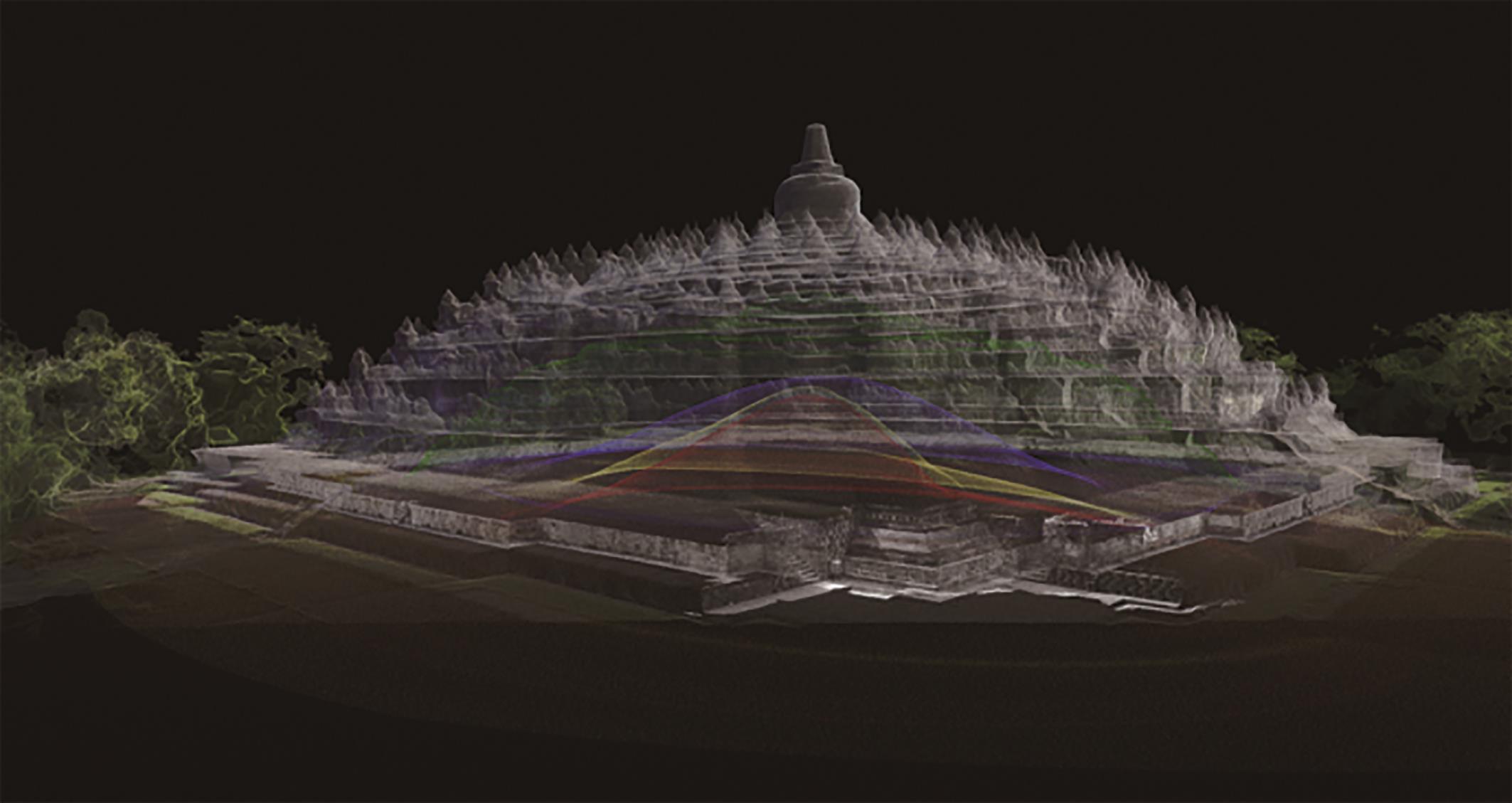

Fig. 15
VR system of the Borobudur Temple using the integrated point cloud of the entire temple

| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
Tokyo National Museum. Borobudur dan Seni Purbakala Indonesia[Z]. Tokyo, Japan: Tokyo National Museum, 1980.
|
| 20 |
|
| 21 |
|
| 22 |
Balai Konservasi Borobudur. Candi Borobudur[EB/OL]. (2016-07-21) [2023-07-25].
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| [1] | Shi Min, Guo Shisheng, Wang Suqin, Li Zhaoxin, Zhu Dengming. Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors [J]. Journal of System Simulation, 2026, 38(5): 1290-1302. |
| [2] | Wan Fei, Yin Yong. Large-scale Scene Registration Technology Based on 3D Gaussian Splatting Fusing GPS Prior Information [J]. Journal of System Simulation, 2026, 38(3): 563-571. |
| [3] | Zhu He, Zhou Feng, Zhang Qi, Zhu Mengxiao, Dai Ju. PL-Mamba: A 3D Point Cloud Semantic Segmentation Network Based on Bimodal Fusion [J]. Journal of System Simulation, 2026, 38(1): 73-83. |
| [4] | Li Weigang, Zou Shaofeng, Wang Yongqiang, Yu Chuxiang. Intensity-based Feature Filtering for LiDAR-based SLAM [J]. Journal of System Simulation, 2025, 37(2): 392-403. |
| [5] | Du Yuanhao, Geng Xiuli, Xu Chengzhi, Liu Yinhua. Point Cloud Registration Method Based on Improved Grey Wolf Algorithm and Adaptive Splitting KD-Tree [J]. Journal of System Simulation, 2025, 37(2): 424-435. |
| [6] | Li Weigang, Gan Lei, Wang Yongqiang. Dynamic Scene Point Cloud Mapping Method Based on LiDAR-IMU [J]. Journal of System Simulation, 2025, 37(1): 95-106. |
| [7] | Huo Hanlin, Zou Xiangjun, Chen Yan, Zhou Xinzhao, Chen Mingyou, Li Chengen, Pan Yaoqiang, Tang Yunchao. Visual Robot Obstacle Avoidance Planning and Simulation Using Mapped Point Clouds [J]. Journal of System Simulation, 2024, 36(9): 2149-2158. |
| [8] | Wang Haichao, Yin Yong, Jing Qianfeng, Cong Lin. Estimation of the Berthing Parameter of Unmanned Surface Vessels Based on 3D LiDAR [J]. Journal of System Simulation, 2024, 36(8): 1737-1748. |
| [9] | Ge Chengpeng, Zhao Dong, Wang Rui, Ma Qinghua. Section Point Cloud Denoising Method Based on Enhanced DBSCAN and Distance Consensus Evaluation [J]. Journal of System Simulation, 2024, 36(8): 1800-1809. |
| [10] | Li Weigang, Yu Chuxiang, Wang Yongqiang, Zou Shaofeng. Real-time Lidar SLAM Algorithm Based on Distribution Optimal Registration [J]. Journal of System Simulation, 2024, 36(11): 2566-2577. |
| [11] | Lu Bin, Wang Minghan, Sun Yang, Yang Zhenyu. Global-local Fusion for Efficient 3D Object Detection [J]. Journal of System Simulation, 2024, 36(11): 2616-2630. |
| [12] | Huang Hongzhi, Yan Kai, Liu Changfeng, Wang Jianwen, Luo Bin. Ground Robot Relocation Method Based on UAV Point Cloud Map [J]. Journal of System Simulation, 2024, 36(10): 2444-2454. |
| [13] | Yuan Zhang, Haoyu Han, Xie Han, Jiaxu Fu. Point Cloud Registration Method Based on Improved Covariance Matrix Descriptor [J]. Journal of System Simulation, 2023, 35(5): 979-986. |
| [14] | Chen Ying, Shen Li. Monocular Depth Image Mark-less Pose Estimation Based on Feature Regression [J]. Journal of System Simulation, 2020, 32(2): 269-277. |
| [15] | Wei Liang, Xue Muyao, Huo Ju, Zhang Jinjie. Non-cooperative Target Feature Point Cloud Registration Optimization Based on ICP Algorithm [J]. Journal of System Simulation, 2020, 32(12): 2383-2387. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
