

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (6): 1567-1582.doi: 10.16182/j.issn1004731x.joss.25-1114
• Papers • Previous Articles Next Articles
Chen Xiulong, Sun Yi, Wang Aiguo
Received:2025-11-13
Revised:2026-02-02
Online:2026-06-25
Published:2026-06-25
Contact:
Wang Aiguo
CLC Number:
Chen Xiulong, Sun Yi, Wang Aiguo. Dynamic Analysis of Flexible Mechanism with Lubrication Clearances Considering Uncertain Parameters[J]. Journal of System Simulation, 2026, 38(6): 1567-1582.
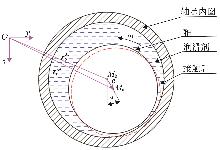
Fig. 1
Clearance model of revolute joint
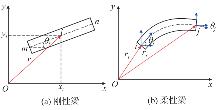
Fig. 2
Two-dimensional planar beam element
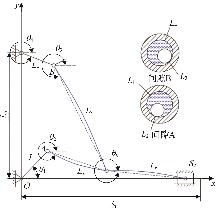
Fig. 3
Seven-link mechanism with lubrication clearances of revolute joint and link flexibility
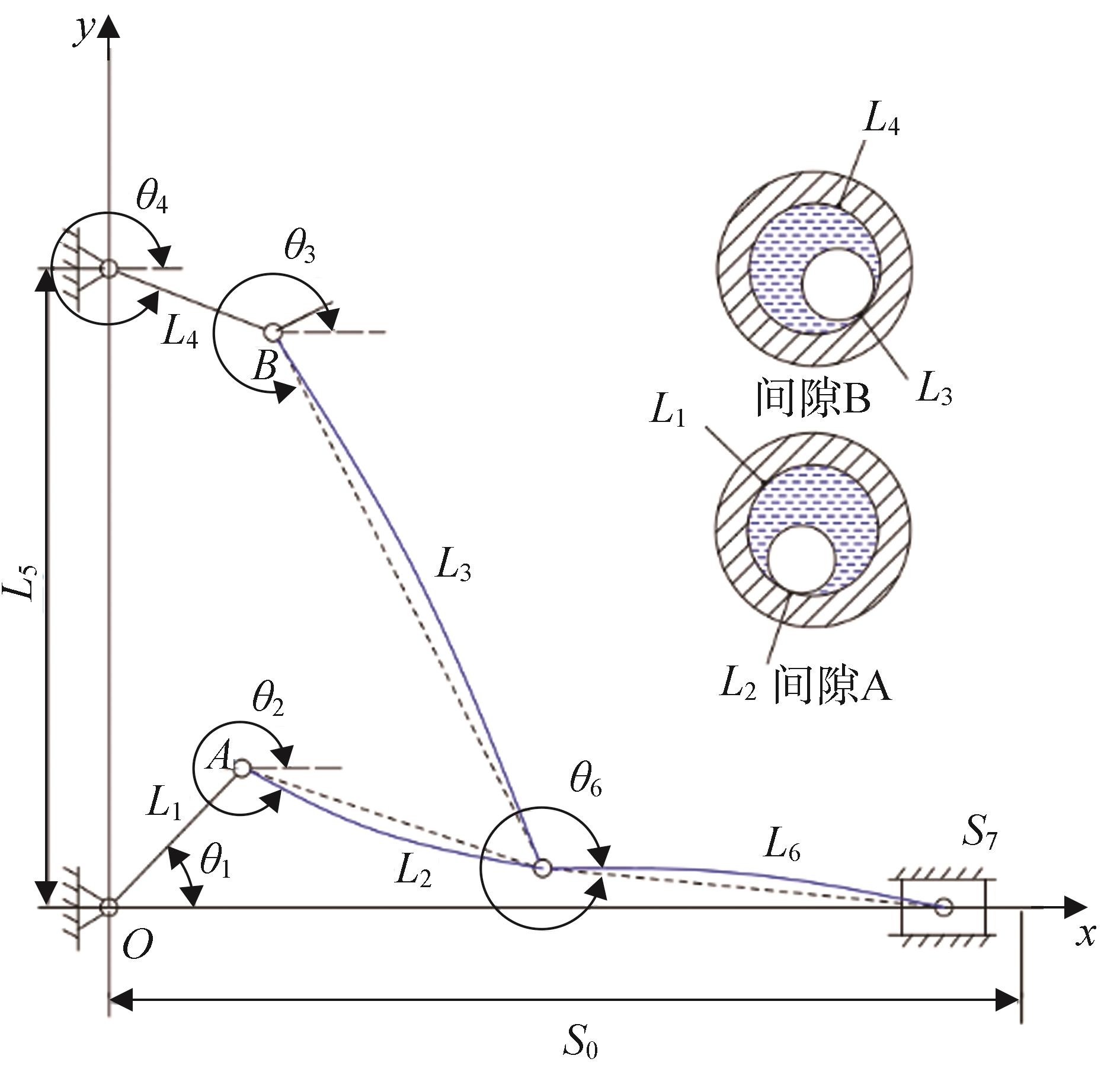

Fig. 4
Flowchart of dynamic solution for flexible mechanism with lubrication clearances considering interval parameters
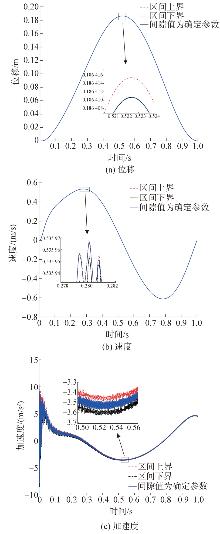
Fig. 5
Motion characteristics of slider with clearances value as interval parameter
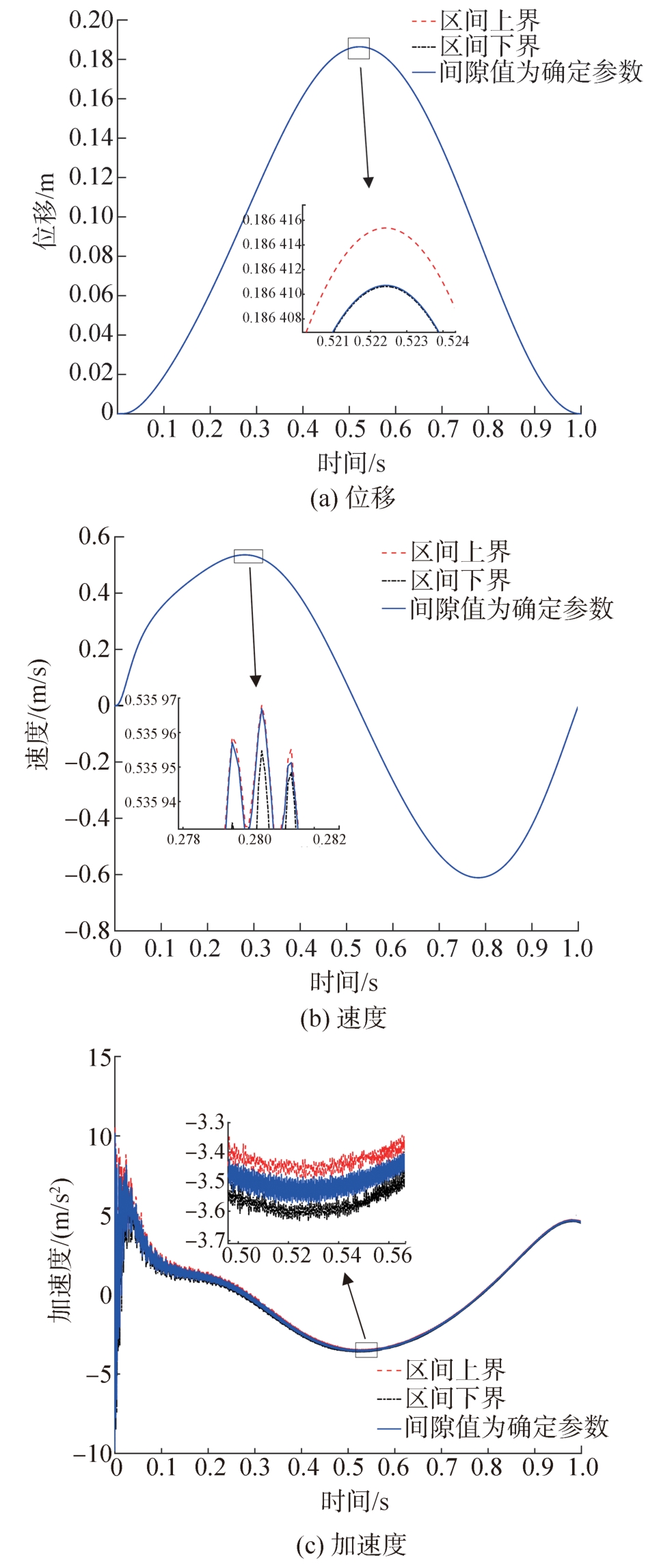
Fig. 6
Acting force with clearances value as interval parameter
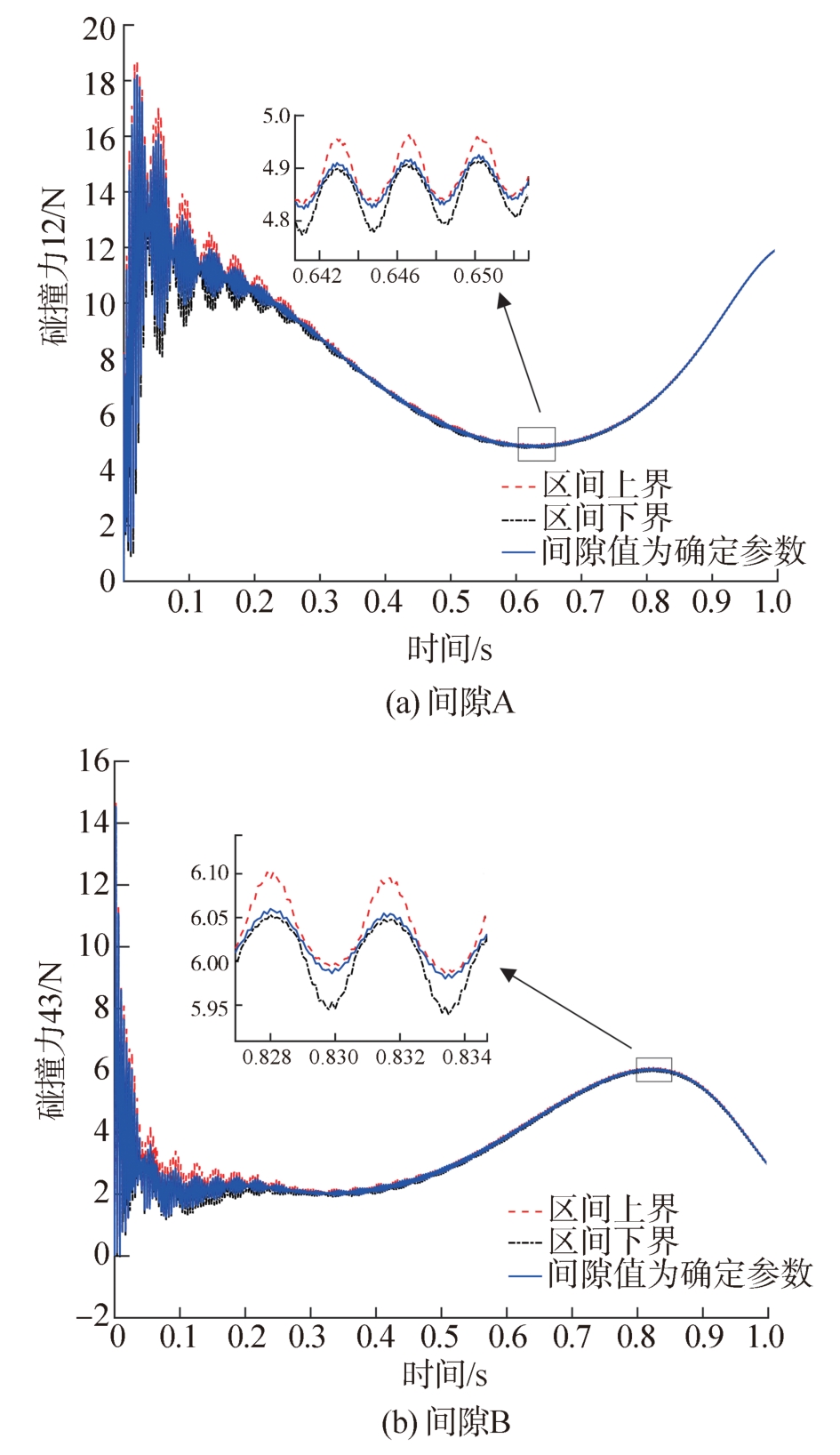

Fig. 7
Motion characteristics of the slider with dynamic viscosity as interval parameter
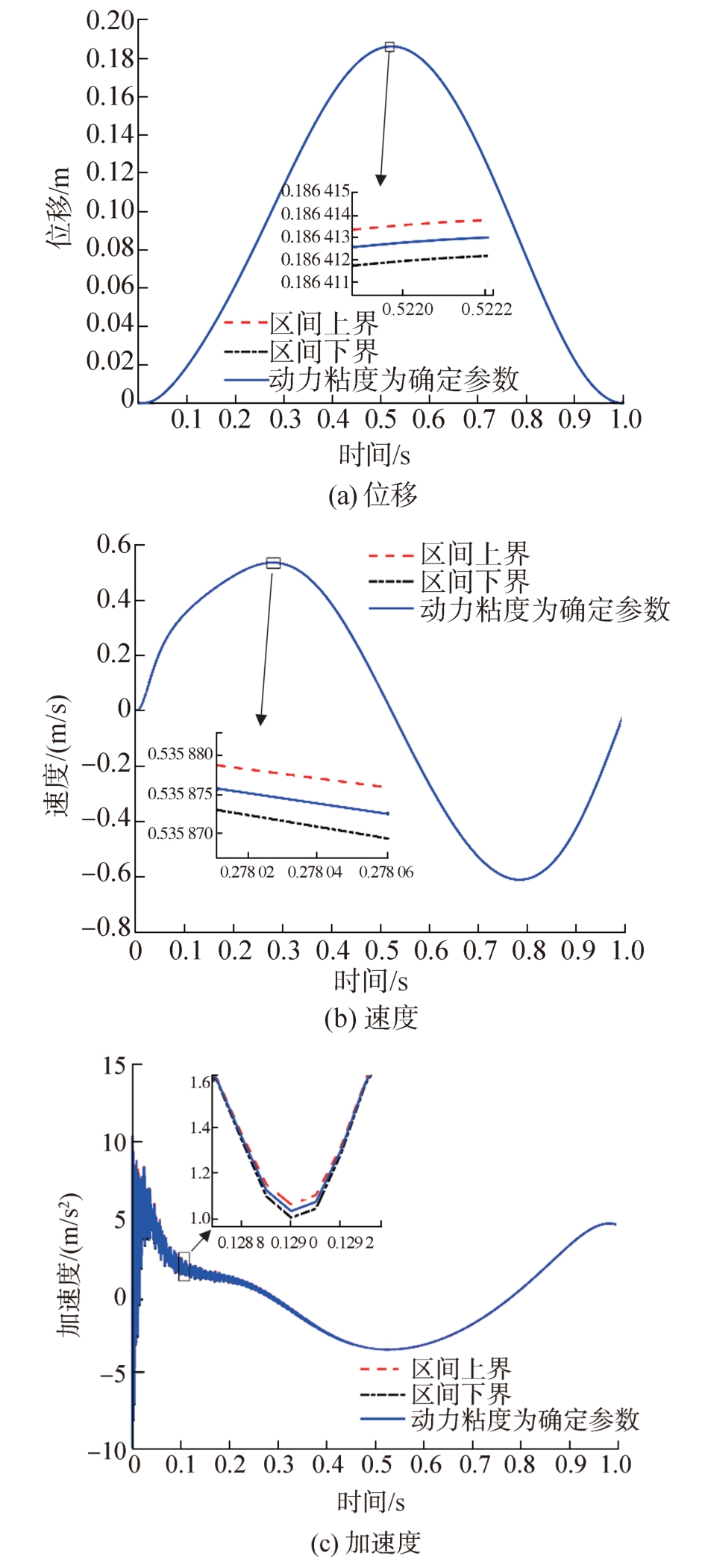

Fig. 8
Acting force with dynamic viscosity as interval parameter
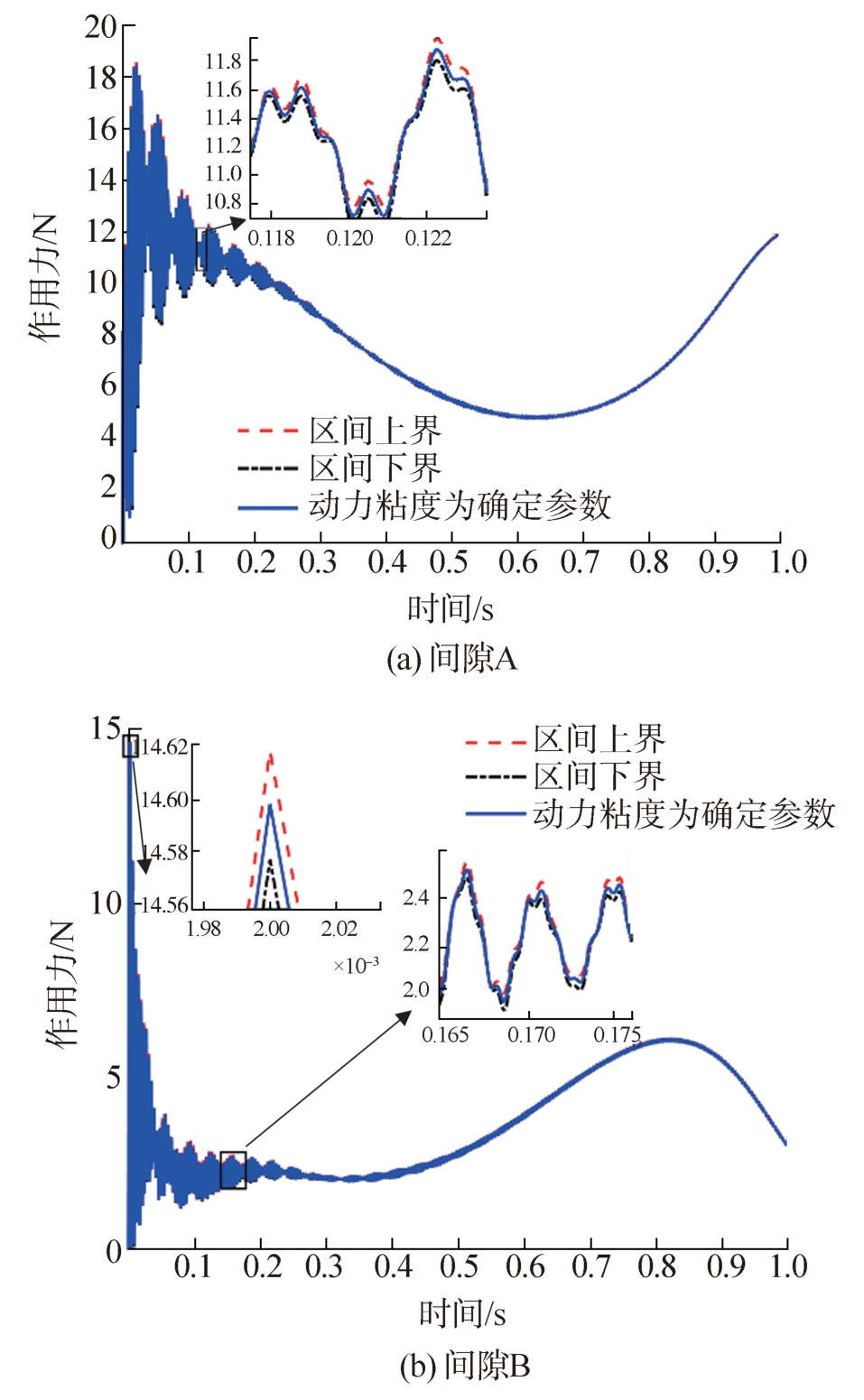
Fig. 9
Motion characteristics of slider with cross-sectional area as interval parameter
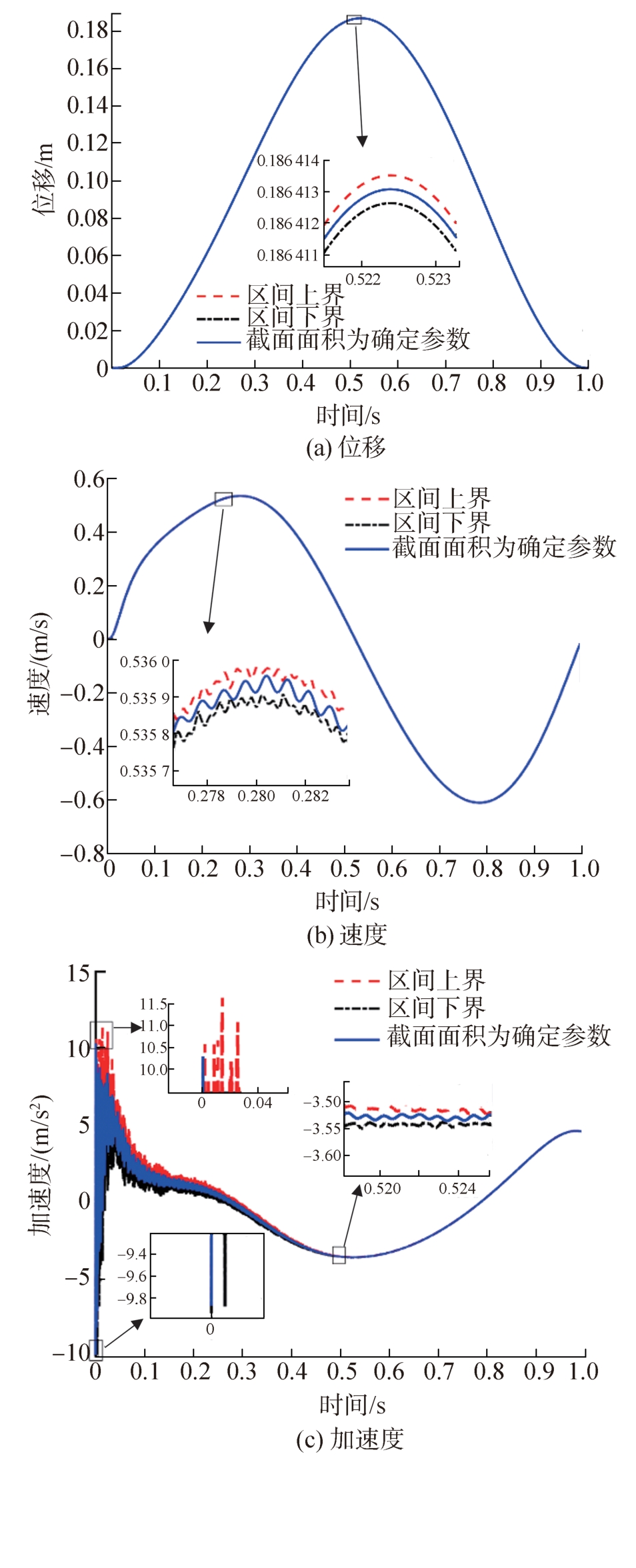

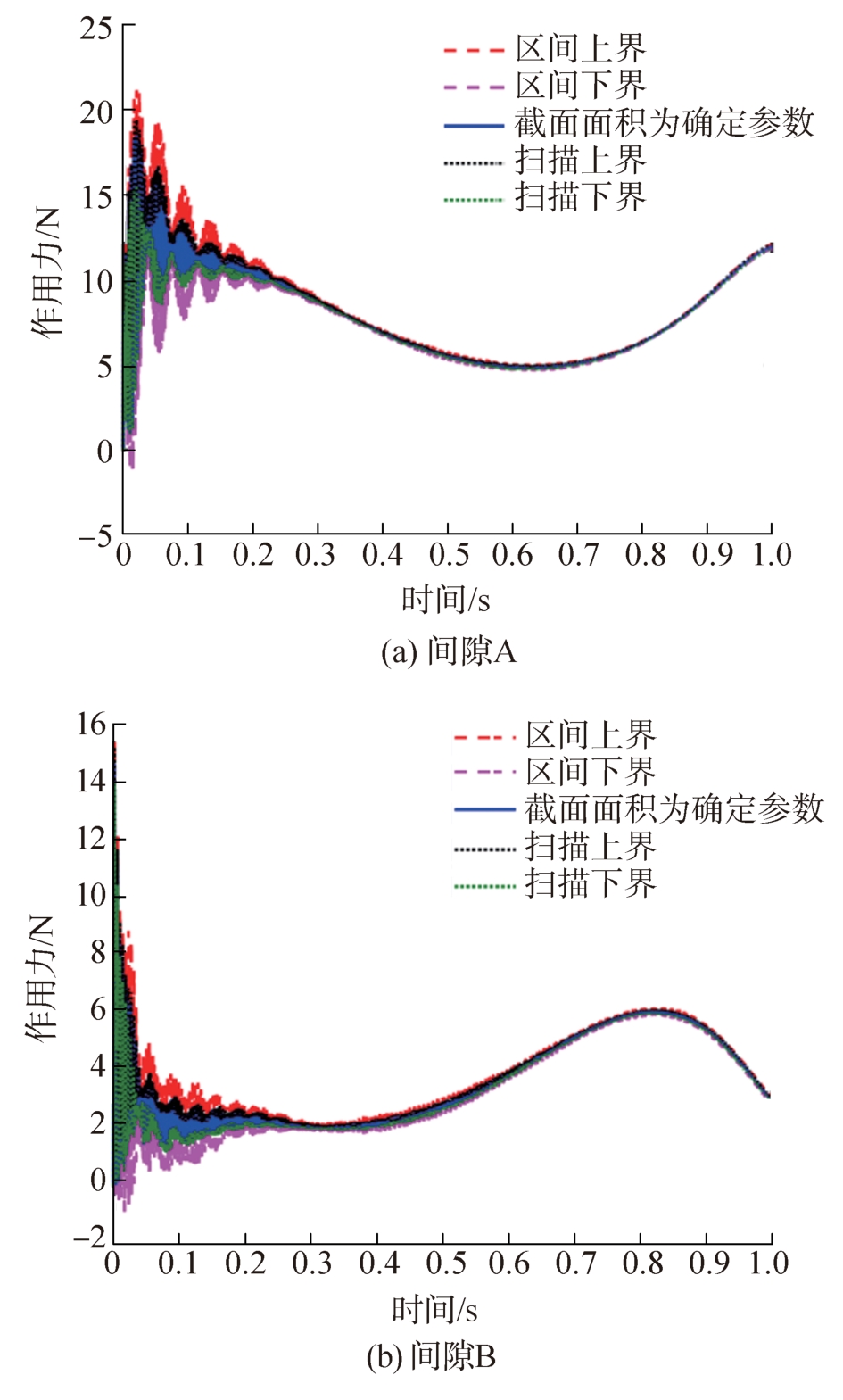
Fig. 10
Acting force with cross-sectional area as interval parameter
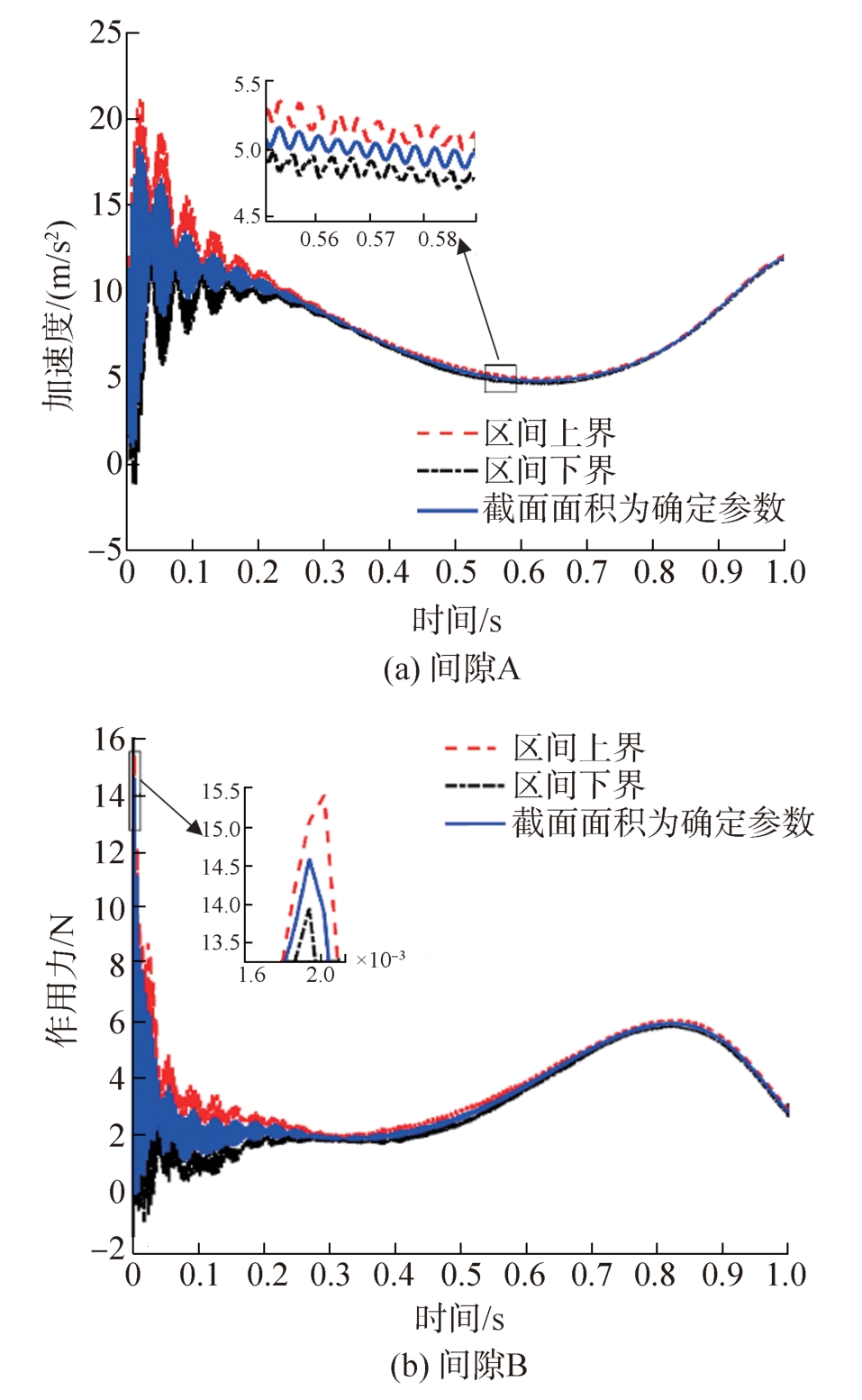
Table 1
Structural parameters
| 构件 | 长度/m | 质心距离/m | 质量/kg | 转动惯量/(kg·m2) |
|---|---|---|---|---|
| 曲柄1 | 0.080 | 0.040 | 0.107 | 1.179×10-4 |
| 连杆2 | 0.180 | 0.090 | 0.219 | 7.736×10-4 |
| 连杆3 | 0.318 | 0.159 | 0.374 | 3.595×10-3 |
| 曲柄4 | 0.080 | 0.040 | 0.107 | 1.179×10-4 |
| 机架5 | 0.301 | — | — | — |
| 连杆6 | 0.300 | 0.150 | 0.354 | 3.056×10-3 |
| 滑块7 | — | — | 0.139 | 6.083×10-5 |
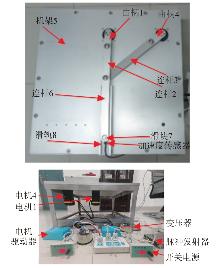
Fig. 11
Test platform of seven-link mechanism with clearances of revolute joint
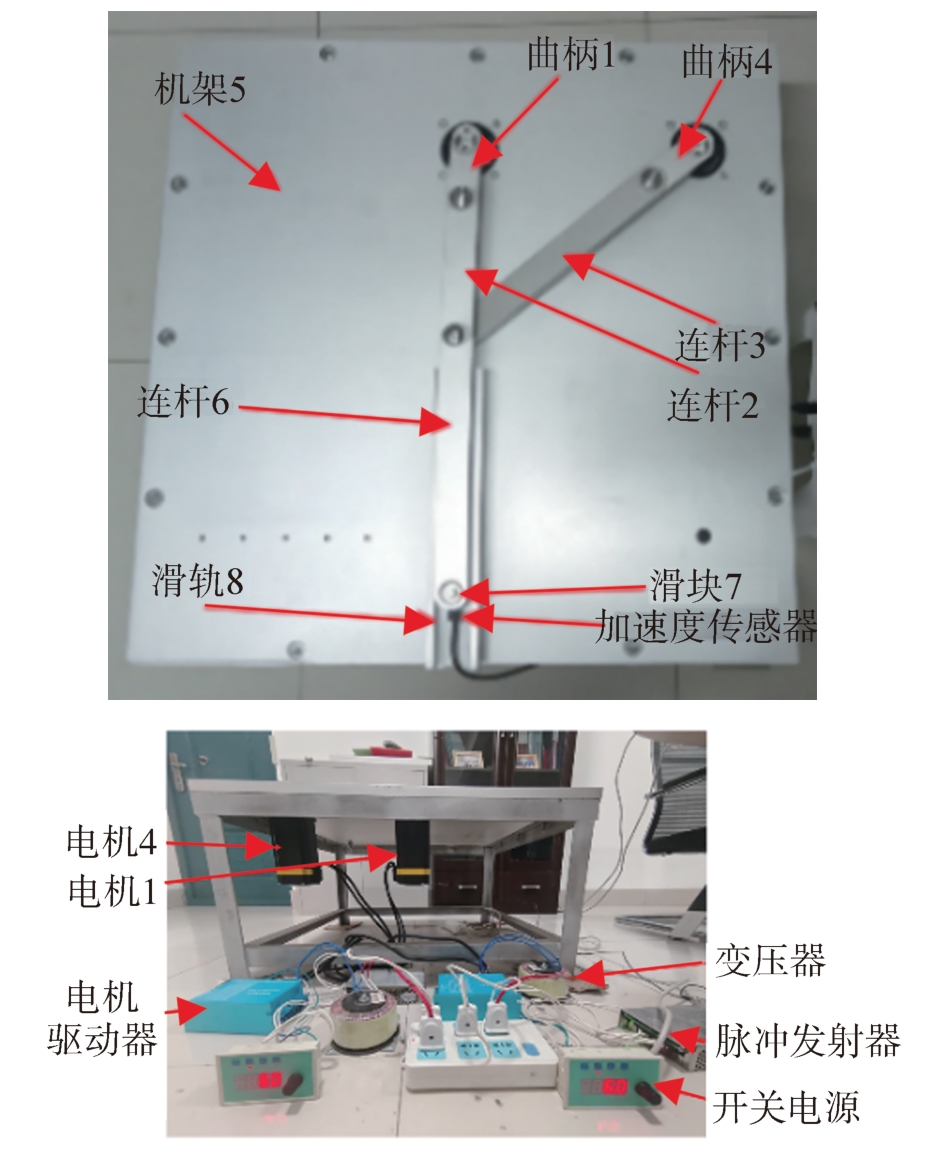

Fig. 12
Comparison of experimental and theoretical results
Fig. 13
Comparison and verification of motion characteristics of the slider
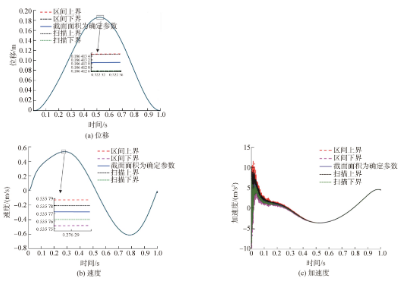

Fig. 14
Comparison and verification of clearances acting force
| [1] | 崔盼礼, 贺尔铭, 宋得军, 等. 基于多项式维数分解法的起落架参数不确定性量化分析[J]. 振动与冲击, 2025, 44(7): 286-292. |
| Cui Panli, He Erming, Song Dejun, et al. Quantitative Analysis of Landing Gear Parametric Uncertainty Based on Polynomial Dimensional Decomposition Method[J]. Journal of Vibration and Shock, 2025, 44(7): 286-292. | |
| [2] | 王森, 宋敬伟, 李浩然, 等. 含间隙冗余混联机构高精度刚度建模方法[J]. 机械工程学报, 2025, 61(11): 72-85. |
| Wang Sen, Song Jingwei, Li Haoran, et al. High Accuracy Stiffness Modeling Method for Hybrid Mechanism with Clearance and Redundant Drive[J]. Journal of Mechanical Engineering, 2025, 61(11): 72-85. | |
| [3] | 杜超凡, 徐宁宁, 黎亮, 等. 基于无网格法的中心刚体- FGM微梁动力学建模和仿真[J]. 力学学报, 2025, 57(10): 2432-2445. |
| Du Chaofan, Xu Ningning, Li Liang, et al. Dynamic Modeling and Simulation of a Hub-FGM Micro-beam Based on Meshless Method[J]. Chinese Journal of Theoretical and Applied Mechanics, 2025, 57(10): 2432-2445. | |
| [4] | Salahshoor Esmaeil, Ebrahimi Saeed, Zhang Yunqing. Frequency Analysis of a Typical Planar Flexible Multibody System with Joint Clearances[J]. Mechanism and Machine Theory, 2018, 126: 429-456. |
| [5] | 万琦, 张永芳, 朱成龙. 多间隙铰链印刷机递纸机构动力学特性研究[J]. 机械传动, 2024, 48(9): 43-48, 75. |
| Wan Qi, Zhang Yongfang, Zhu Chenglong. Research on the Dynamic Characteristics of the Gripper Mechanism with Multi-clearance Joints for Printing Machines[J]. Journal of Mechanical Transmission, 2024, 48(9): 43-48, 75. | |
| [6] | Zheng Enlai, Wang Tianyu, Guo Jun, et al. Dynamic Modeling and Error Analysis of Planar Flexible Multilink Mechanism with Clearance and Spindle-bearing Structure[J]. Mechanism and Machine Theory, 2019, 131: 234-260. |
| [7] | 陈修龙, 江守源. 含间隙多连杆机构刚柔耦合动力学建模与分析[J]. 计算机集成制造系统, 2023, 29(10): 3366-3379. |
| Chen Xiulong, Jiang Shouyuan. Rigid-flexible Coupling Dynamic Modeling and Analysis of Multi-link Mechanism with Clearance[J]. Computer Integrated Manufacturing Systems, 2023, 29(10): 3366-3379. | |
| [8] | 王志敏, 金国光, 梁栋, 等. 考虑多间隙关节和不确定参数机构的非线性动力学分析[J]. 振动与冲击, 2023, 42(12): 48-58. |
| Wang Zhimin, Jin Guoguang, Liang Dong, et al. Nonlinear Dynamics Analysis of Mechanism with Multi-clearance Joints and Uncertain Parameters[J]. Journal of Vibration and Shock, 2023, 42(12): 48-58. | |
| [9] | 郑延丰, 李思远, 杨超, 等. 基于Chebyshev多项式和有限质点法的Bennett机构动力响应不确定性分析[J]. 工程力学, 2026, 43(3): 21-30, 55. |
| Zheng Yanfeng, Li Siyuan, Yang Chao, et al. Dynamics Analysis of Bennett Linkage with Parameter Uncertainties Using Chebyshev Polynomials Method and Finite Particle Method[J]. Engineering Mechanics, 2026, 43(3): 21-30, 55. | |
| [10] | Xiang Wuweikai, Yan Shaoze. Dynamic Analysis of Space Robot Manipulator Considering Clearance Joint and Parameter Uncertainty: Modeling, Analysis and Quantification[J]. Acta Astronautica, 2020, 169: 158-169. |
| [11] | 马新星, 张振果, 华宏星. 考虑参数非概率不确定性的碰摩转子非线性振动响应分析[J]. 振动与冲击, 2021, 40(18): 56-62. |
| Ma Xinxing, Zhang Zhenguo, Hua Hongxing. Nonlinear Vibration Responses of a Rubbing Rotor Considering the Non-probabilistic Uncertainty of Parameters[J]. Journal of Vibration and Shock, 2021, 40(18): 56-62. | |
| [12] | Sun Dongyang, Zhang Baoqiang, Liang Xuefeng, et al. Dynamic Analysis of a Simplified Flexible Manipulator with Interval Joint Clearances and Random Material Properties[J]. Nonlinear Dynamics, 2019, 98(2): 1049-1063. |
| [13] | Marques Filipe, Flores Paulo, Pimenta Claro J C, et al. Modeling and Analysis of Friction Including Rolling Effects in Multibody Dynamics: A Review[J]. Multibody System Dynamics, 2019, 45(2): 223-244. |
| [14] | Chen Xiulong, Mu Xing. Theoretical and Experimental Studies on Effect of Impact Load on Dynamic Characteristics of Multi-link Press Mechanisms with Clearances[J]. Nonlinear Dynamics, 2024, 112(1): 81-100. |
| [15] | Tan Haiyan, Hu Yujin, Li Li. A Continuous Analysis Method of Planar Rigid-body Mechanical Systems with Two Revolute Clearance Joints[J]. Multibody System Dynamics, 2017, 40(4): 347-373. |
| [16] | 王铁成, 陈国平, 马方, 等. 含混合间隙多体系统动力学分析[J]. 振动与冲击, 2016, 35(9): 178-183. |
| Wang Tiecheng, Chen Guoping, Ma Fang, et al. Dynamic Analysis of Multibody Systems with Mixed Clearance[J]. Journal of Vibration and Shock, 2016, 35(9): 178-183. | |
| [17] | Chen Yu, Feng Jun, Peng Xu, et al. An Approach for Dynamic Analysis of Planar Multibody Systems with Revolute Clearance Joints[J]. Engineering With Computers, 2021, 37(3): 2159-2172. |
| [18] | Chen Xiulong, Jiang Shuai, Wang Suyu, et al. Dynamics Analysis of Planar Multi-DOF Mechanism with Multiple Revolute Clearances and Chaos Identification of Revolute Clearance Joints[J]. Multibody System Dynamics, 2019, 47(4): 317-345. |
| [19] | Zhang Haodong, Zhang Xianmin, Zhan Zhenhui, et al. Dynamic Modeling and Comparative Analysis of a 3-PRR Parallel Robot with Multiple Lubricated Joints[J]. International Journal of Mechanics and Materials in Design, 2020, 16(3): 541-555. |
| [20] | Leonov O A, Shkaruba N Z, Vergazova Y G. Determination of Ultimate Functional Clearances of a Plain Bearing Under Hydrodynamic Lubrication Conditions[J]. Journal of Friction and Wear, 2024, 45(4): 223-227. |
| [21] | Flores Paulo, Ambrósio Jorge, Pimenta Claro J. Dynamic Analysis for Planar Multibody Mechanical Systems with Lubricated Joints[J]. Multibody System Dynamics, 2004, 12(1): 47-74. |
| [1] | Li Xiaonan, Chao Tao, Ma Ping, Yang Ming, Wang Yuxuan. Robust Identification of Black-box Nonlinear SSM Using Expectation-maximization [J]. Journal of System Simulation, 2026, 38(5): 1146-1158. |
| [2] | Wang Jun, Liu Min, Zhang Xiaochuan, Ding Yishan, Feng Juhui, Zhuang Ye. Modelling Method of Unmanned Vehicle Dynamics Based on Neural Network [J]. Journal of System Simulation, 2026, 38(4): 932-947. |
| [3] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [4] | Xie Xueyuan, Lin Chen, Wu Han, Zhao Qinglan, Gao Junfei, Hao Qiangguo, Zheng Xinqian. Research on Joint Simulation of Special Vehicle Engine Operation Characteristics Based on Virtual Driving Scenarios [J]. Journal of System Simulation, 2025, 37(8): 2163-2175. |
| [5] | Hu yang, Li Zihao, Fu Deyi, Song Ziqiu, Fang Fang, Liu Jizhen. Deep Learning Modeling of Multi-scale Characteristics of Large-scale Wind Turbine Gearbox [J]. Journal of System Simulation, 2025, 37(10): 2454-2468. |
| [6] | Yuan Chao, Zhang Yao, Zhao Yadong, Xu Dawei, Yuan Jing, Zhai Yongjie. Modeling and Simulation of Pipeline Cable Inspection Robot Based on Omnidirectional Wheel [J]. Journal of System Simulation, 2024, 36(9): 2100-2112. |
| [7] | Hongbin Liu, Zhiqiang Shen, Yize Wang, Ming Qiu, Wenrong Lin. Application of Digital Twin Model in Grinding of Bearing Rings [J]. Journal of System Simulation, 2023, 35(3): 557-567. |
| [8] | Yu Xiaolan, Xiong Wei, Han Chi, Wu Zhenwei. Research on Operational Effectiveness Evaluation Method of Space-based Information Support Equipment System [J]. Journal of System Simulation, 2023, 35(11): 2429-2444. |
| [9] | Jianlei Liu, Xuejian Jiao, Huaiqian Wang. Development of Vehicle Dynamics Virtual Simulation System Based on CarSim [J]. Journal of System Simulation, 2022, 34(8): 1847-1854. |
| [10] | Yingyan Zhao, Qunsheng Cao, Zhengnan Cao, Jianchun Wang. Realization of Domestic Ship Hydrodynamic Numerical Software on Industrial Cloud Platform [J]. Journal of System Simulation, 2022, 34(8): 1855-1863. |
| [11] | Jing Wang, Ying Dong. Simulation Research on COVID-19 Transmission and Control Measures Based on SEIiRD Model [J]. Journal of System Simulation, 2022, 34(7): 1532-1546. |
| [12] | Wei Chen, Zongping Li, Can Liu, Yanni Ju. Research on the Number of Passengers on the Platform of Rail Transit Station Considering Congestion Propagation [J]. Journal of System Simulation, 2022, 34(7): 1582-1592. |
| [13] | Tong Wu, Qinghui Wang, Zhijia Xu. Study on the Scale Characteristics of Permeability of TPMS Porous Materials [J]. Journal of System Simulation, 2022, 34(5): 1015-1024. |
| [14] | Ou Xie, Aiguo Song, Qixin Zhu. Study on Near-body Pressure Characteristics of Bionic Robotic Fish Undulating in Near Wall Region [J]. Journal of System Simulation, 2022, 34(4): 870-877. |
| [15] | Guangxu Xi, Yongyi Liu, Chong Wu, Junjie Zhang, Yinghao Chen. Key Technology Research on Stall Spin Simulation Training System of an Aircraft [J]. Journal of System Simulation, 2022, 34(4): 878-890. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
