

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (10): 2182-2192.doi: 10.16182/j.issn1004731x.joss.23-FZ0828
• Papers • Previous Articles Next Articles
Li Ming1( ), Xu Qun2, Wang Yan1(), Ji Zhicheng1
), Xu Qun2, Wang Yan1(), Ji Zhicheng1
Received:2023-07-04
Revised:2023-09-08
Online:2023-10-30
Published:2023-10-26
Contact:
Wang Yan
E-mail:1284991759@qq.com;wangyan@jiangnan.edu.cn
CLC Number:
Li Ming, Xu Qun, Wang Yan, Ji Zhicheng. Simulation and Research of Manipulator Motion Strategy Based on Adaptive Dynamic Programming[J]. Journal of System Simulation, 2023, 35(10): 2182-2192.
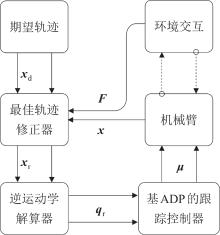
Fig. 1
Flow chart of control scheme
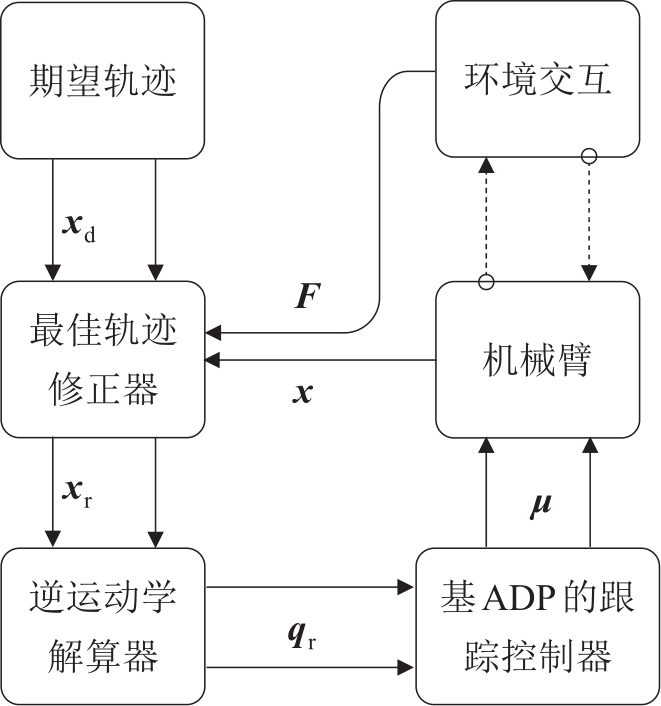
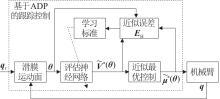
Fig. 2
Structure diagram of ADP-based tracking controller
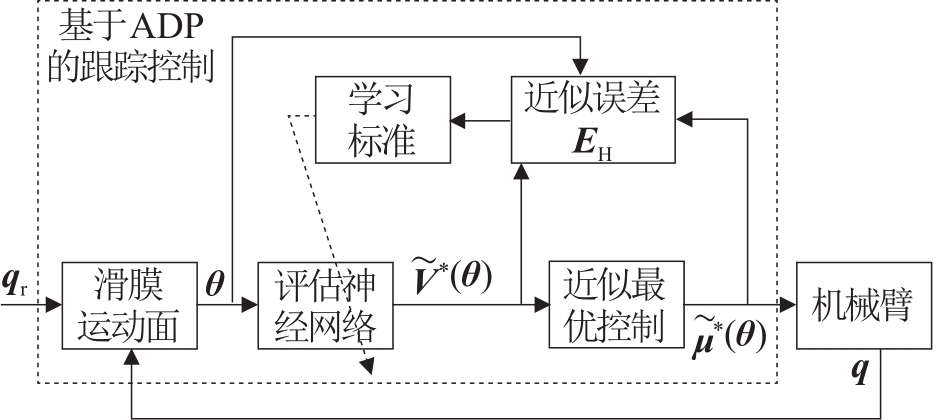
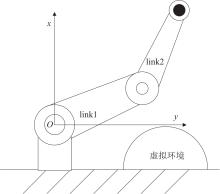
Fig. 3
Structure diagram of simulated two-link manipulator
Fig. 4
Tracking trajectory based on PID
Fig. 5
Tracking trajectory based on ADP
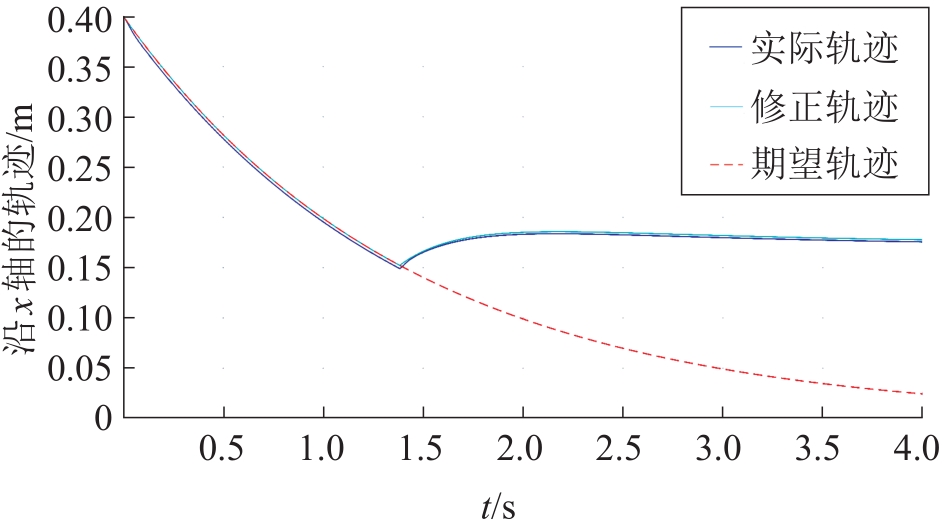
Fig. 6
Comparison of ADP and PID tracking errors
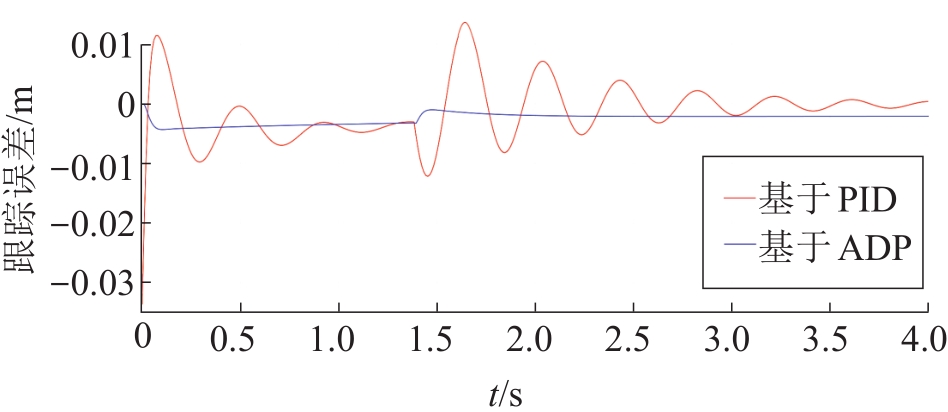
Fig. 7
Torque of each joint under PID control
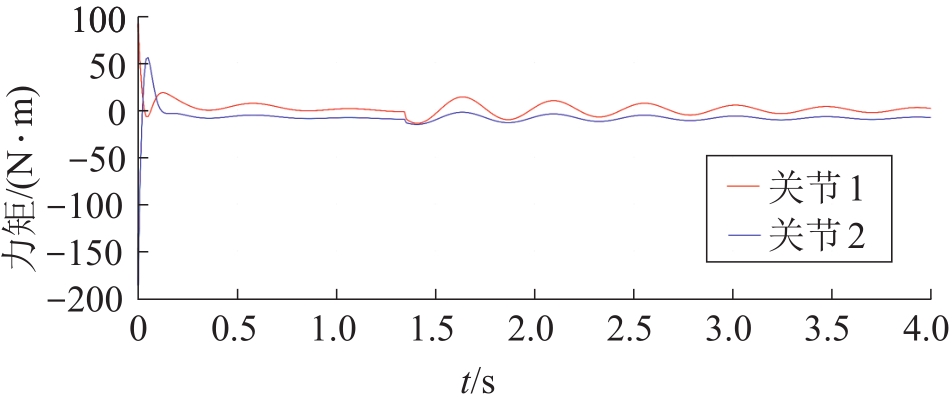
Fig. 8
Torque of each joint under ADP optimal control
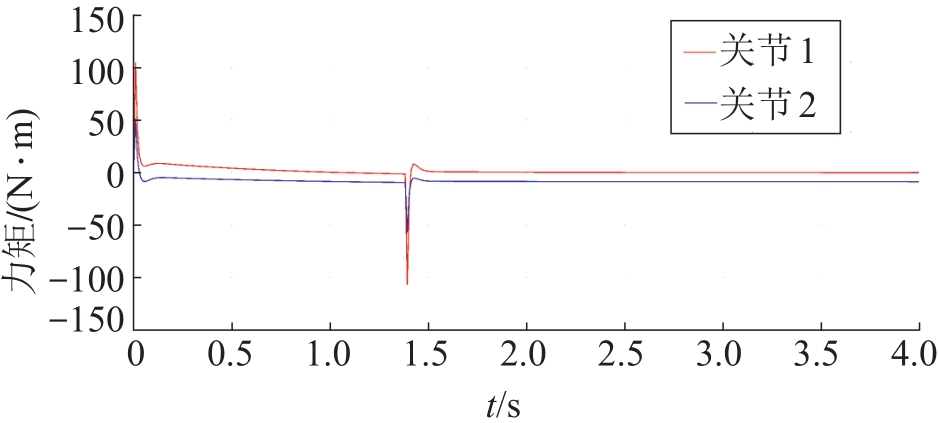
Fig. 9
Convergence of parameter weights
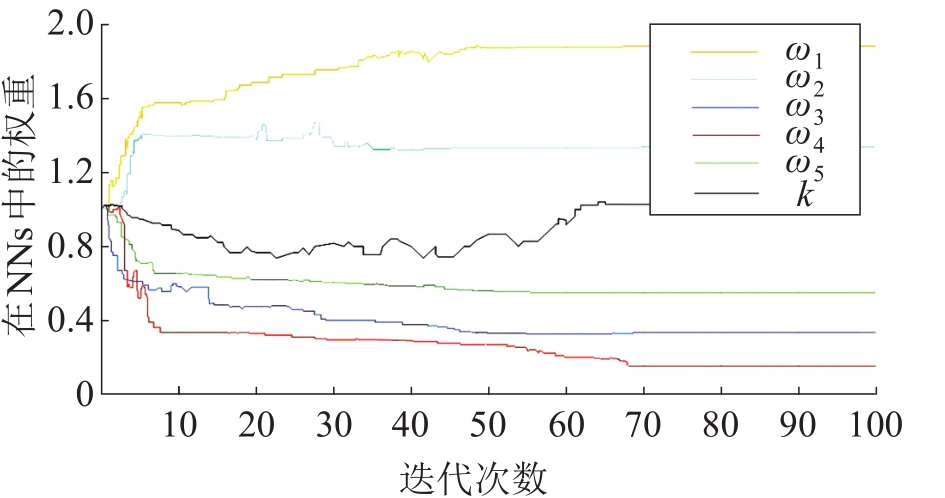
Fig. 10
Tracking trajectory based on ADP before R optimization
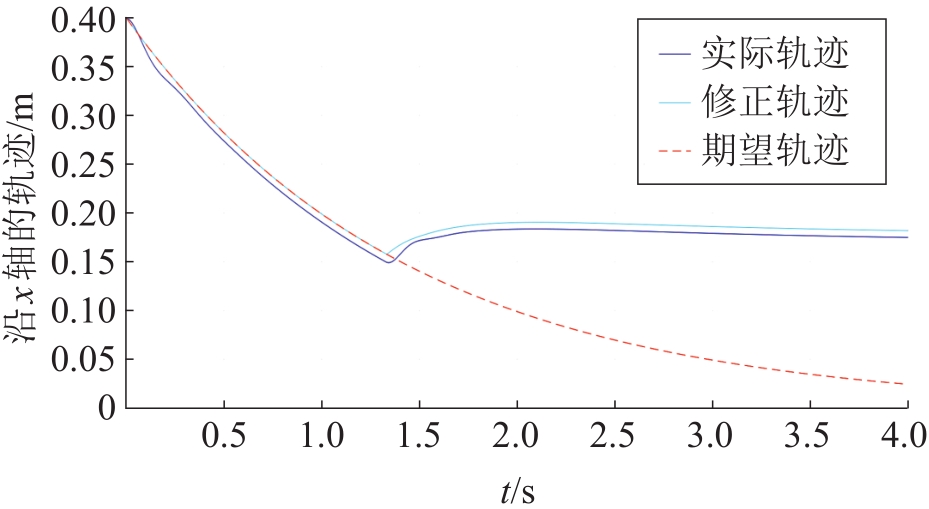

Fig. 11
Comparison of tracking errors before and after R optimization
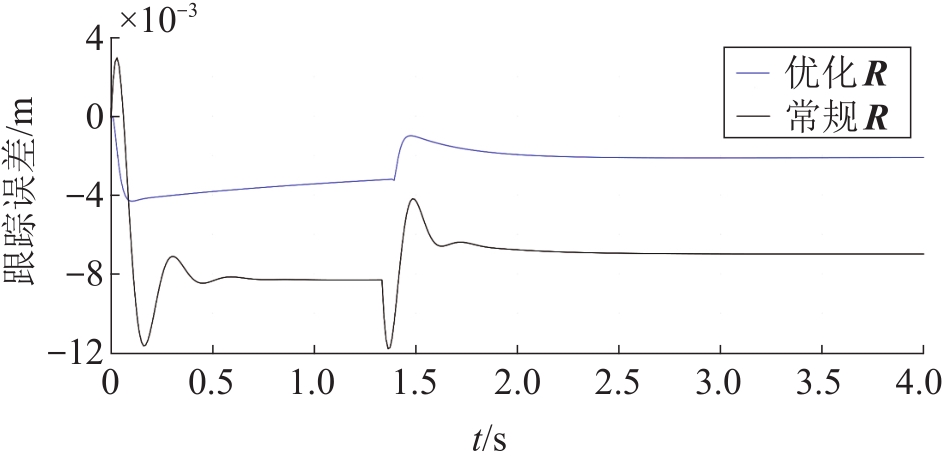
Fig. 12
Torque of each joint before R optimization
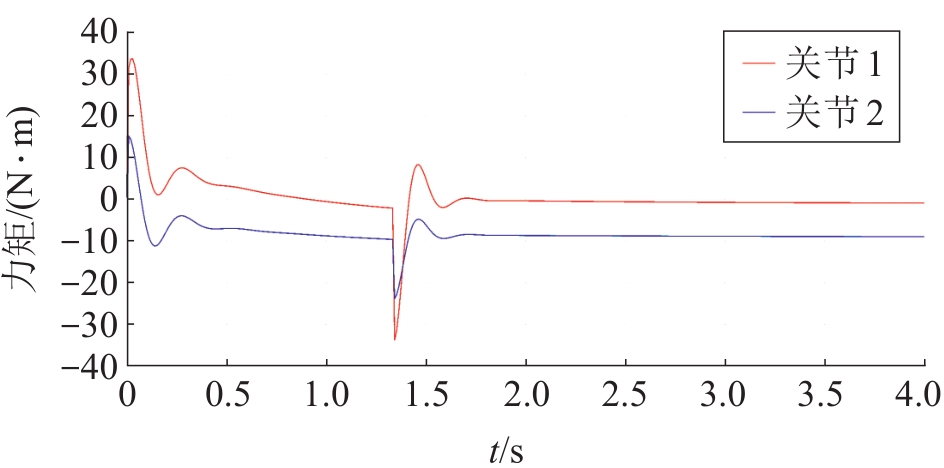
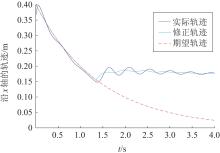
Fig. 13
PID control tracking trajectory under disturbance
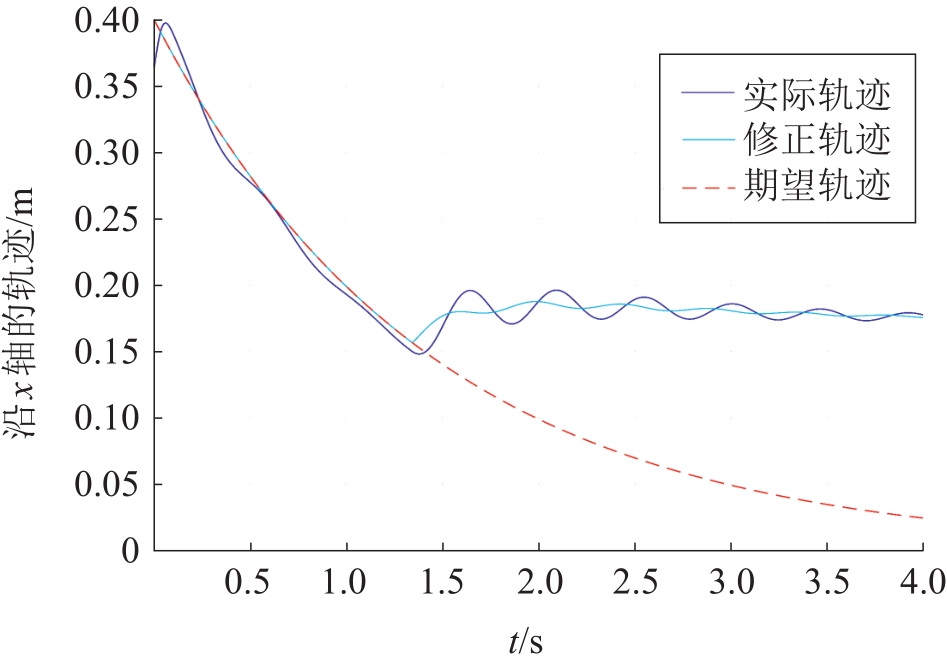
Fig. 14
ADP control tracking trajectory after R optimization under disturbance
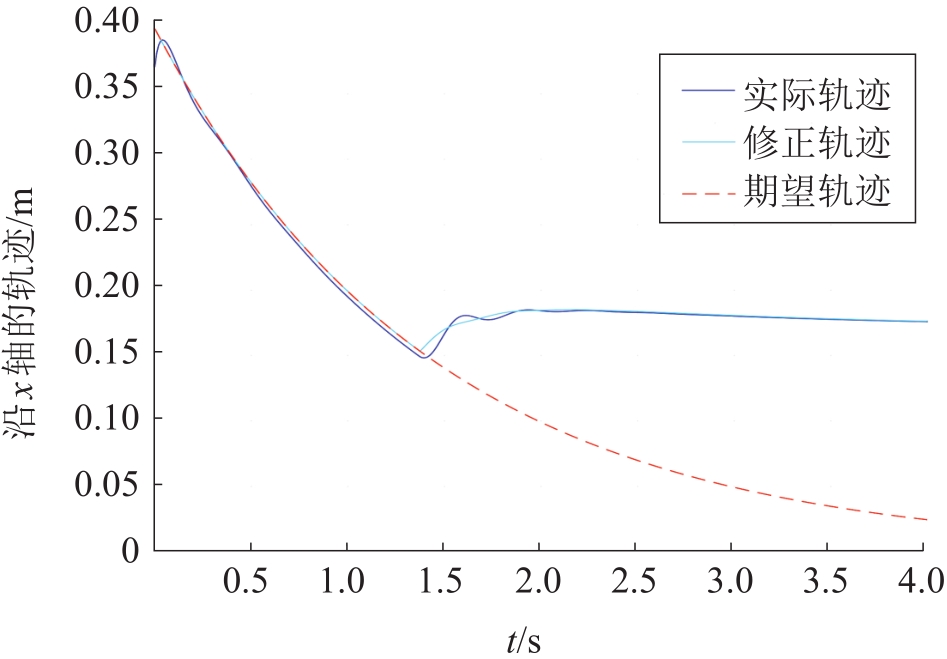
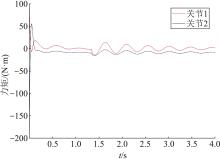
Fig. 15
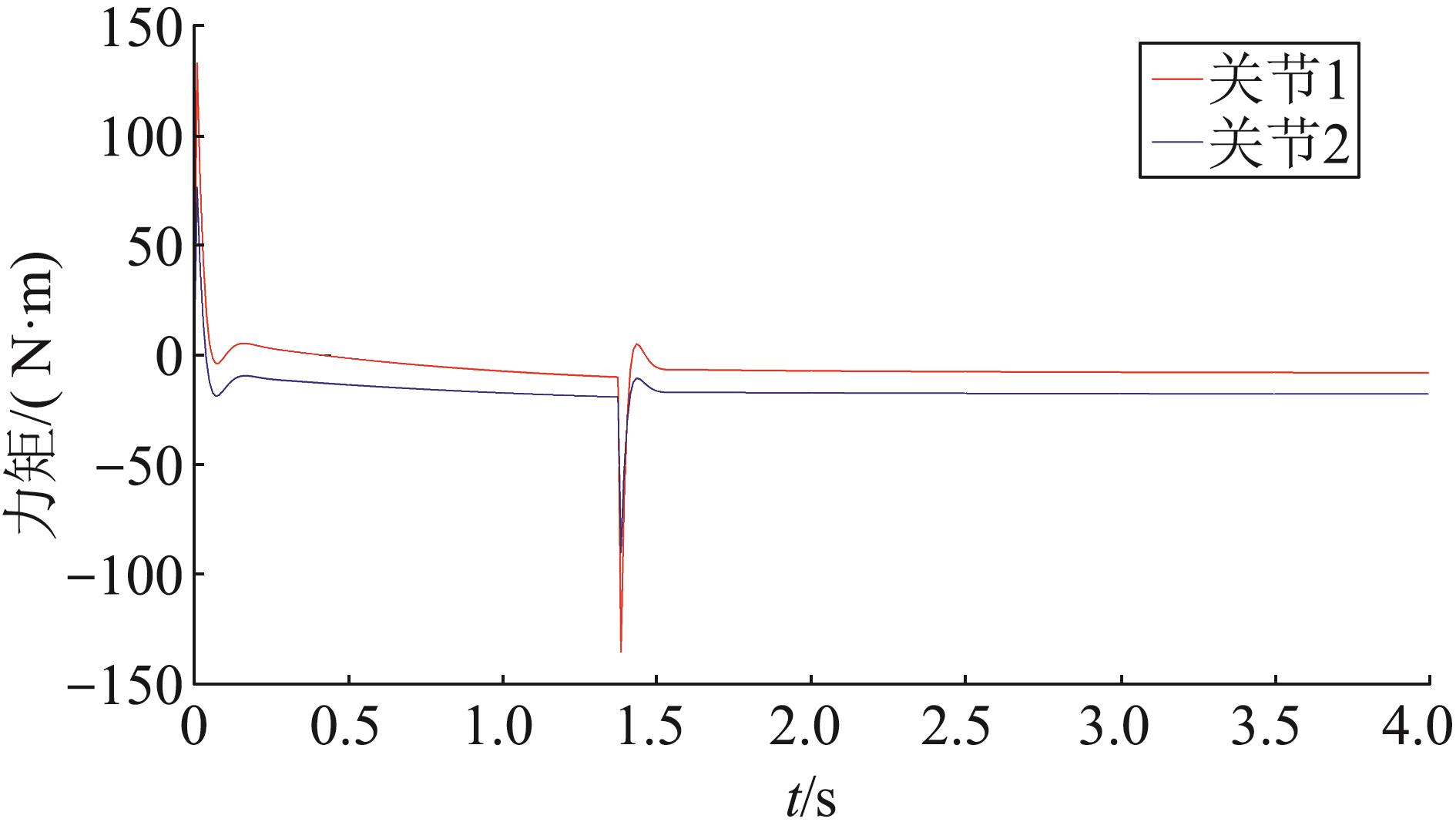
PID control of joint torque under disturbance
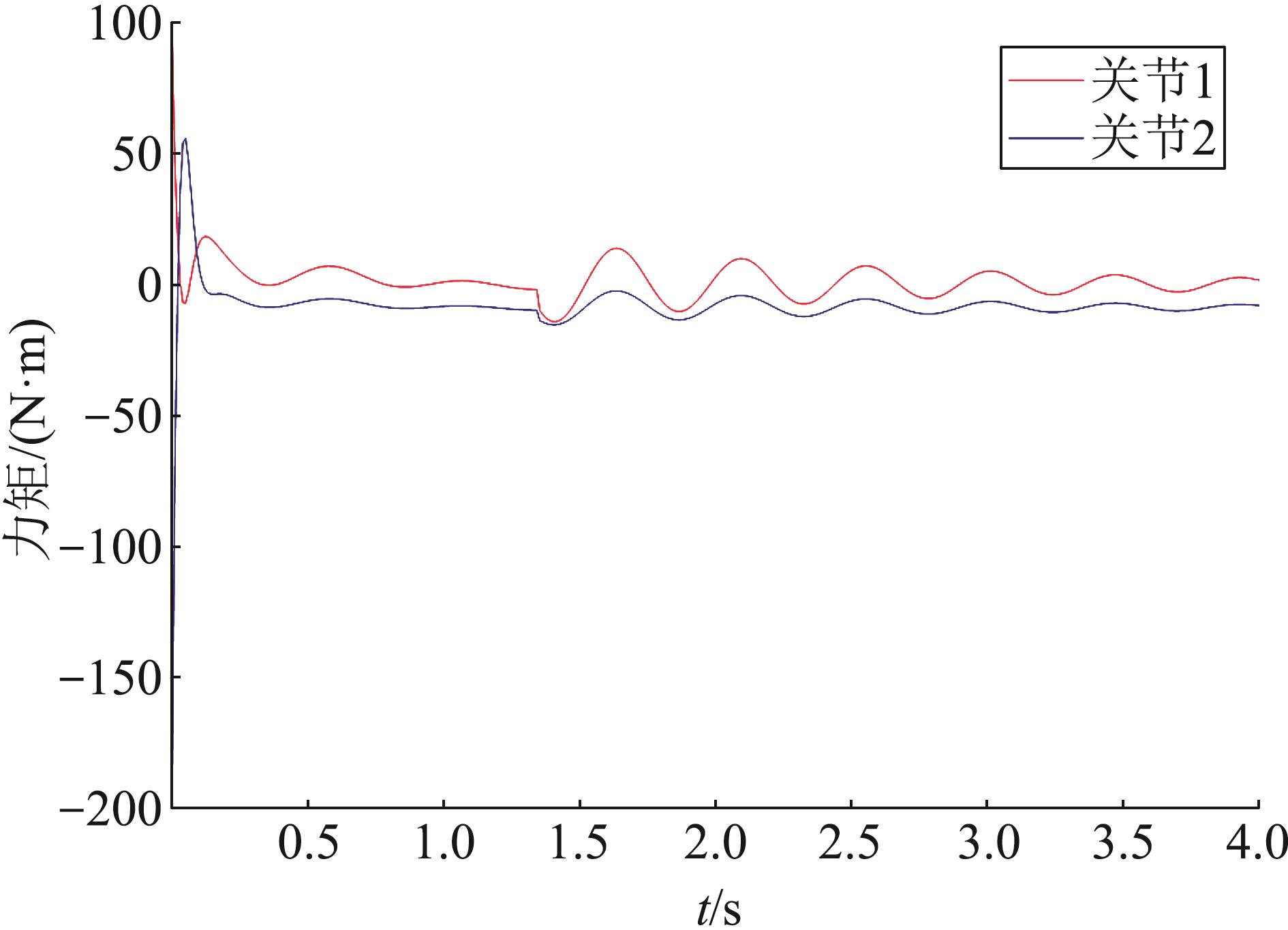
Fig. 16
ADP control of joint torque after R optimization under disturbance
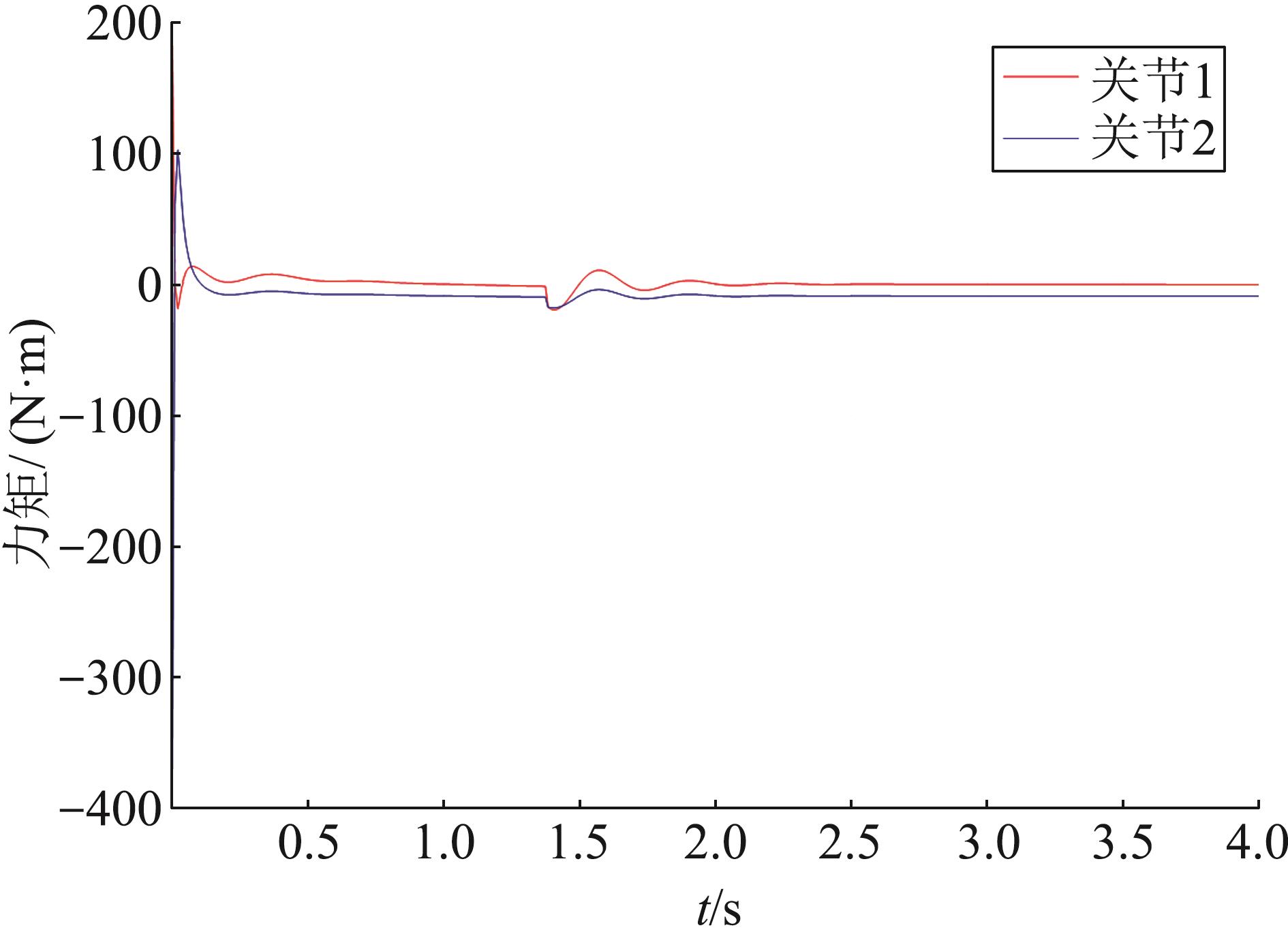
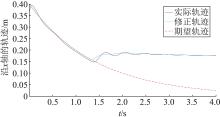
Fig. 17
PID control tracking trajectory under uncertain parameters
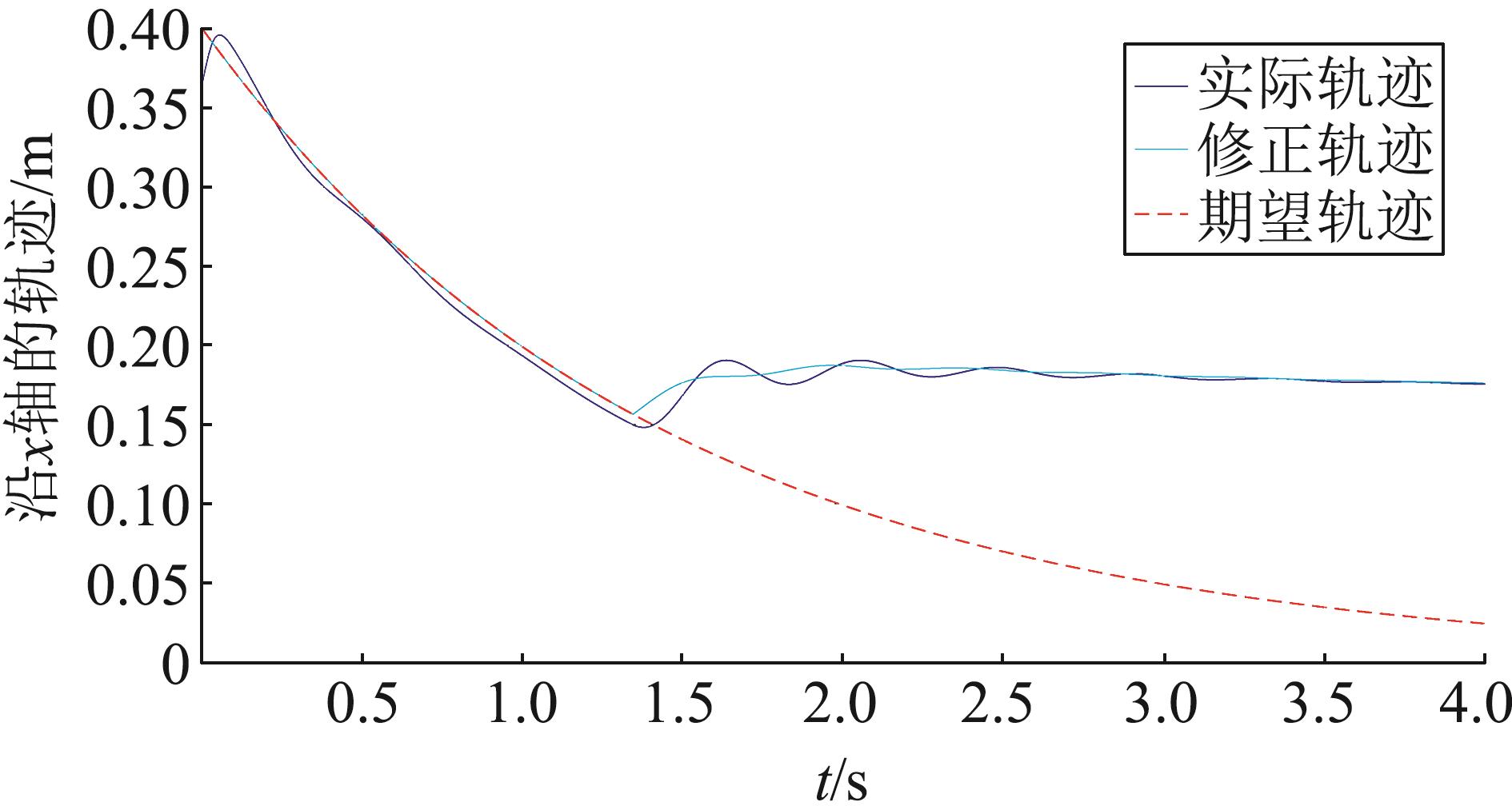
Fig. 18
ADP control tracking trajectory under uncertain parameters
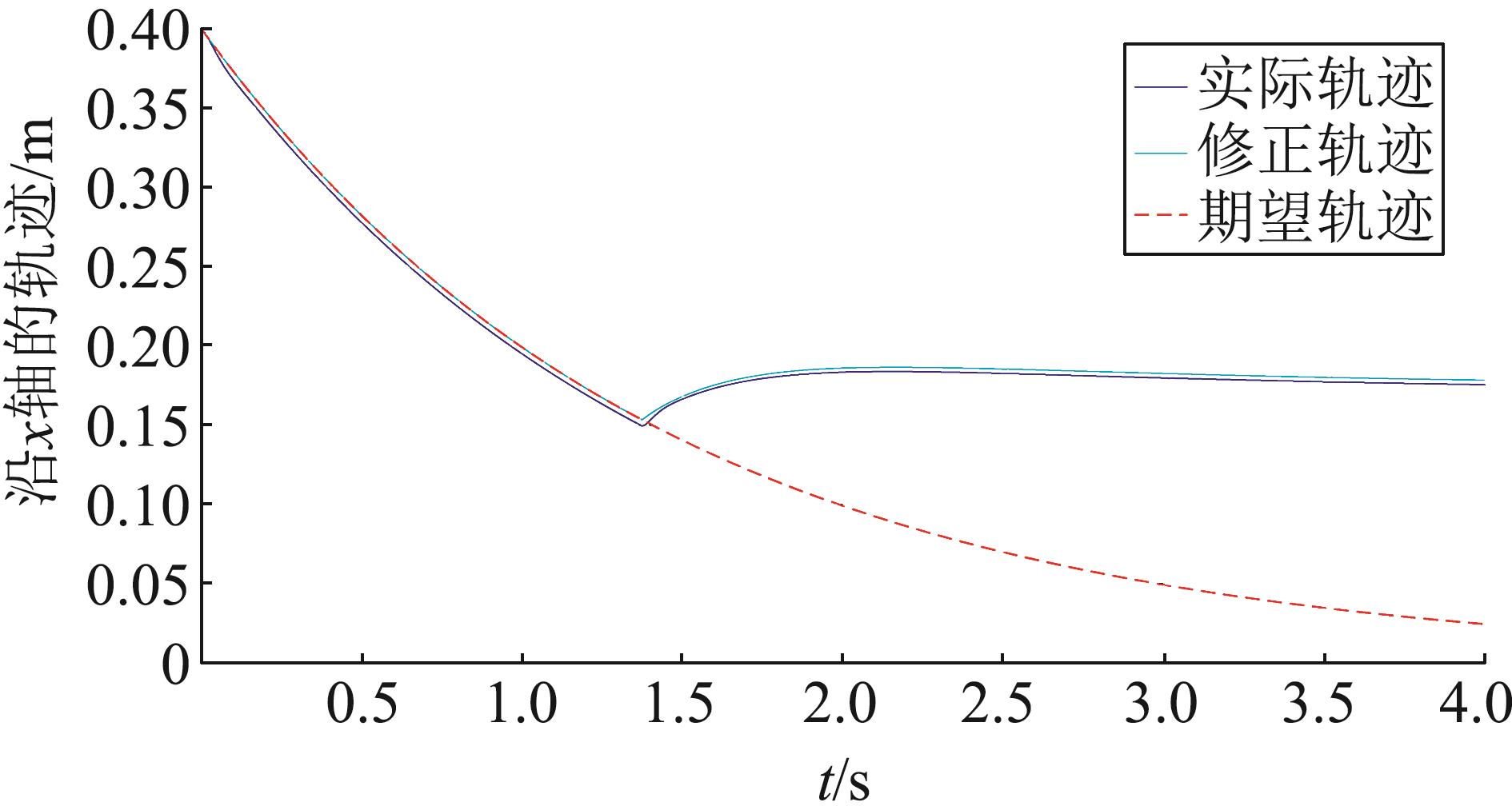
Fig. 19
PID control of joint torque under uncertain parameters
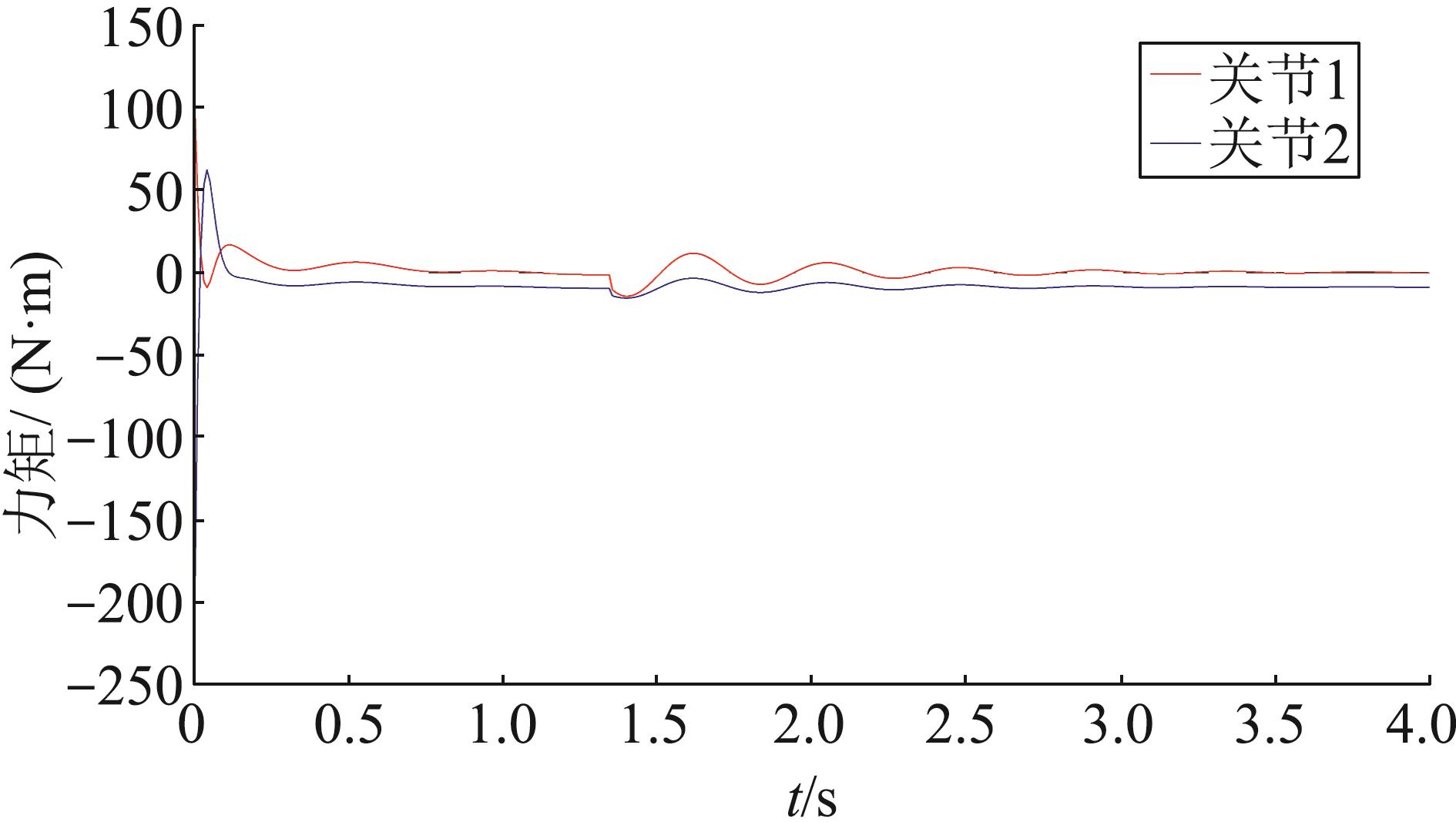
Fig. 20
ADP control of joint torque under uncertain parameters
| 1 | 夏长高, 杨鹏程, 韩江义, 等. 基于遗传算法优化的除草机械臂模糊PID控制研究[J]. 农机化研究, 2022, 44(12): 15-21. |
| Xia Changgao, Yang Pengcheng, Han Jiangyi, et al. Research on Control of Weeding Manipulator Arm Based on Fuzzy PID Optimized by Genetic Algorithm[J]. Journal of Agricultural Mechanization Research, 2022, 44(12): 15-21. | |
| 2 | 丁荣乐, 侯旋, 孙文建. 考虑变有效载荷的机械臂自适应PID控制[J]. 机电工程, 2022, 39(3): 291-299. |
| Ding Rongle, Hou Xuan, Sun Wenjian. Adaptive PID Controlling Method for Robotic Manipulators Considering Variable Payloads[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(3): 291-299. | |
| 3 | 刘鹤松, 颜文旭, 倪宏宇, 等. 基于新型自适应律的巡检机械臂滑模控制[J]. 控制工程, 2023, 30(3): 434-442. |
| Liu Hesong, Yan Wenxu, Ni Hongyu, et al. Sliding Mode Control of Inspection Manipulator Based on New Adaptive Law[J]. Control Engineering of China, 2023, 30(3): 434-442. | |
| 4 | 许一鸣. 基于自适应动态规划的柔性机械臂组合控制[D]. 徐州: 中国矿业大学, 2019. |
| Xu Yiming. Composite Control of Flexible Manipulators Based on Adaptive Dynamic Programming[D]. Xuzhou: China University of Mining and Technology, 2019. | |
| 5 | Gao Hejia, He Wei, Zhou Chen, et al. Neural Network Control of a Two-link Flexible Robotic Manipulator Using Assumed Mode Method[J]. IEEE Transactions on Industrial Informatics, 2019, 15(2): 755-765. |
| 6 | Tayebi A. Adaptive Iterative Learning Control for Robot Manipulators[J]. Automatica, 2004, 40(7): 1195-1203. |
| 7 | 李焕, 王奉文, 徐世杰, 等. 基于阻抗控制的机械臂末端工具的柔顺控制[J]. 空间控制技术与应用, 2019, 45(1): 20-26. |
| Li Huan, Wang Fengwen, Xu Shijie, et al. Compliance Control of End-effector of Space Manipulator Based on Impedance Control[J]. Aerospace Control and Application, 2019, 45(1): 20-26. | |
| 8 | 杨国卿. 不确定参数条件下机械臂的滑模预测控制研究[D]. 济南: 山东大学, 2022. |
| Yang Guoqing. Research on Sliding Mode Predictive Control of Robot Manipulator with Uncertain Parameters[D]. Ji'nan: Shandong University, 2022. | |
| 9 | 裴红蕾. 机械臂关节空间轨迹的神经网络滑模跟踪控制[J]. 制造技术与机床, 2020(5): 43-48. |
| Pei Honglei. Manipulator Joint Space Trajectory Tracking Control Based on Neutral Network-sliding Mode Controller[J]. Manufacturing Technology & Machine Tool, 2020(5): 43-48. | |
| 10 | 刘洋洋, 院老虎, 腾英元, 等. 基于RBF神经网络补偿的自适应滑模机械手控制[J]. 组合机床与自动化加工技术, 2023(6): 119-122, 127. |
| Liu Yangyang, Yuan Laohu, Teng Yingyuan, et al. Adaptive Sliding Mode Manipulator Control Based on RBF Neural Network Compensation[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2023(6): 119-122, 127. | |
| 11 | Peng Guangzhu, Yang Chenguang, He Wei, et al. Force Sensorless Admittance Control With Neural Learning for Robots With Actuator Saturation[J]. IEEE Transactions on Industrial Electronics, 2020, 67(4): 3138-3148. |
| 12 | 韩秀梅. 基于自适应动态规划的非线性系统最优控制方法研究[D]. 大连: 大连理工大学, 2022. |
| Han Xiumei. Adaptive-dynamic-programming-based Optimal Control Method for Nonlinear Systems[D]. Dalian: Dalian University of Technology, 2022. | |
| 13 | 王泰华, 马彬彬, 李亚飞. 基于神经网络观测器的机械臂力/位置控制[J]. 制造业自动化, 2023, 45(2): 184-188. |
| Wang Taihua, Ma Binbin, Li Yafei. Mechanical Arm Force/Position Control Based on Neural Network Observer[J]. Manufacturing Automation, 2023, 45(2): 184-188. | |
| 14 | 张文辉, 沈金淼, 游张平, 等. 空间机械臂基于速度观测器的神经网络控制[J]. 空间控制技术与应用, 2022, 48(6): 12-21. |
| Zhang Wenhui, Shen Jinmiao, You Zhangping, et al. Neural Network Control of Space Manipulator Based on Velocity Observer[J]. Aerospace Control and Application, 2022, 48(6): 12-21. | |
| 15 | 唐智浩. 空间机械臂动力学预测与控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. |
| Tang Zhihao. Research on Dynamic Prediction and Control Method of Space Manipulator[D]. Harbin: Harbin Institute of Technology, 2021. | |
| 16 | Liu Derong, Yang Xiong, Li Hongliang. Adaptive Optimal Control for a Class of Continuous-time Affine Nonlinear Systems With Unknown Internal Dynamics[J]. Neural Computing and Applications, 2013, 23(7): 1843-1850. |
| 17 | Zhan Hong, Huang Dianye, Yang Chenguang. Adaptive Dynamic Programming Enhanced Admittance Control for Robots With Environment Interaction and Actuator Saturation[J]. International Journal of Intelligent Robotics and Applications, 2021, 5(1): 89-100. |
| 18 | Vamvoudakis K G, Lewis F L. Online Actor-critic Algorithm to Solve the Continuous-time Infinite Horizon Optimal Control Problem[J]. Automatica, 2010, 46(5): 878-888. |
| 19 | Zhang Beibei, Yang Xiao, Zhao Dongya, et al. Sliding Mode Control for Nonlinear Manipulator Systems[J]. IFAC-PapersOnLine, 2017, 50(1): 5127-5132. |
| 20 | Yoo B K, Ham W C. Adaptive Control of Robot Manipulator Using Fuzzy Compensator[J]. IEEE Transactions on Fuzzy Systems, 2000, 8(2): 186-199. |
| 21 | Rahmani M, Komijani H, Rahman M H. New Sliding Mode Control of 2-DOF Robot Manipulator Based on Extended Grey Wolf Optimizer[J]. International Journal of Control Automation and Systems, 2020, 18(6): 1572-1580. |
| [1] | Wang Jun, Liu Min, Zhang Xiaochuan, Ding Yishan, Feng Juhui, Zhuang Ye. Modelling Method of Unmanned Vehicle Dynamics Based on Neural Network [J]. Journal of System Simulation, 2026, 38(4): 932-947. |
| [2] | Wang Jiheng, Hu Yang, Song Ziqiu, Fang Fang, Liu Jizhen. Prediction of Inflow Wind Field for Large-scale Wind Turbines Based on Multimodal Hybrid Deep Learning [J]. Journal of System Simulation, 2026, 38(2): 501-517. |
| [3] | Li Zhiqiang, Shen Xukun, Hu Yong, Zhou Xueyang, Chen Yifan. Material Reconstruction from Single Image Combining Neural Networks with Singular Value Decomposition [J]. Journal of System Simulation, 2026, 38(1): 189-199. |
| [4] | Wei Chengbiao, Zhao Taoyan, Cao Jiangtao, Li Ping. Design and Prediction of Deep Fuzzy Neural Network [J]. Journal of System Simulation, 2025, 37(9): 2200-2210. |
| [5] | Lü Jinhu, Jiang Hongyi, Liu Deyuan, Tan Shaolin. Modeling and Simulation of Complex Systems Based on Graph Neural Networks [J]. Journal of System Simulation, 2025, 37(7): 1624-1638. |
| [6] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [7] | Zhang Peng, Feng Ke, Gong Jiancheng, Yang Xiaoqiang, Shen Jinxing. Combat Effectiveness Evaluation of Air Defense Missile Weapon System Based on RBF Neural Network [J]. Journal of System Simulation, 2025, 37(2): 529-540. |
| [8] | Shen Jiawei, Cai Daye, Yang Guoqing, Lü Pan, Li Hong. Dynamic Loading Simulation Method for Large-scale Spiking Neural Network [J]. Journal of System Simulation, 2025, 37(2): 541-550. |
| [9] | Li Xiaobin, Hu Bing, Yin Chao, Li Bo, Ma Jun. Spatiotemporal Graph Convolution-based Demand Forecasting and Simulation Analysis for Automotive Parts Supply Chain [J]. Journal of System Simulation, 2025, 37(12): 3060-3074. |
| [10] | Zhang Wenkang, Sun Xiaofeng, Zhong Yiping, Yin Yong. Numerical Simulations of Ship Liquid Tank Sloshing Based on Graph Neural Networks [J]. Journal of System Simulation, 2025, 37(12): 3087-3099. |
| [11] | Xu Jinglin, Chen Qianru, Peng Yang, Yu Fangqiang. Self-calibrating Passenger Flow Simulation and Spatial Optimization for Public Building Based on GRU-SA [J]. Journal of System Simulation, 2025, 37(11): 2826-2838. |
| [12] | Tian Yuanxing, Han Zeyin, Wang Ning, Su Baoding, Xiang Weilin. Twin Modeling of Gearbox Fault Early Warning System Based on Spatio-Temporal Characteristics [J]. Journal of System Simulation, 2025, 37(11): 2867-2876. |
| [13] | Zhang Zhili, Liu Jin, Zhou Zhaofa, Liang Zhe, Zhang Yunhao. Research on Temperature Compensation Technology of Fiber Optic Gyroscope based on ISCSO-BP Neural Network Model [J]. Journal of System Simulation, 2025, 37(11): 2904-2917. |
| [14] | Li Boning, Chen Ming, Qi Shuchang, Meng Haoran, Wang Lei. Attitude Control of Quadrotor UAV Based on Disturbance Observer and Command Filtering [J]. Journal of System Simulation, 2025, 37(11): 2793-2803. |
| [15] | Huang Deqi, Tu Yating, Zhang Zhenhua, Guo Xin. Modeling and Simulation of Traffic Signal Control Based on MLP with Improved GCN-TD3 [J]. Journal of System Simulation, 2025, 37(10): 2568-2577. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
