

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (12): 2917-2925.doi: 10.16182/j.issn1004731x.joss.23-1422
• Papers • Previous Articles Next Articles
Li Ming, Ye Wangzhong, Yan Jiehua
Received:2023-11-22
Revised:2023-12-18
Online:2024-12-20
Published:2024-12-20
CLC Number:
Li Ming, Ye Wangzhong, Yan Jiehua. Path Planning of Desert Robot Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2024, 36(12): 2917-2925.

Fig. 1
Basic framework of reinforcement learning
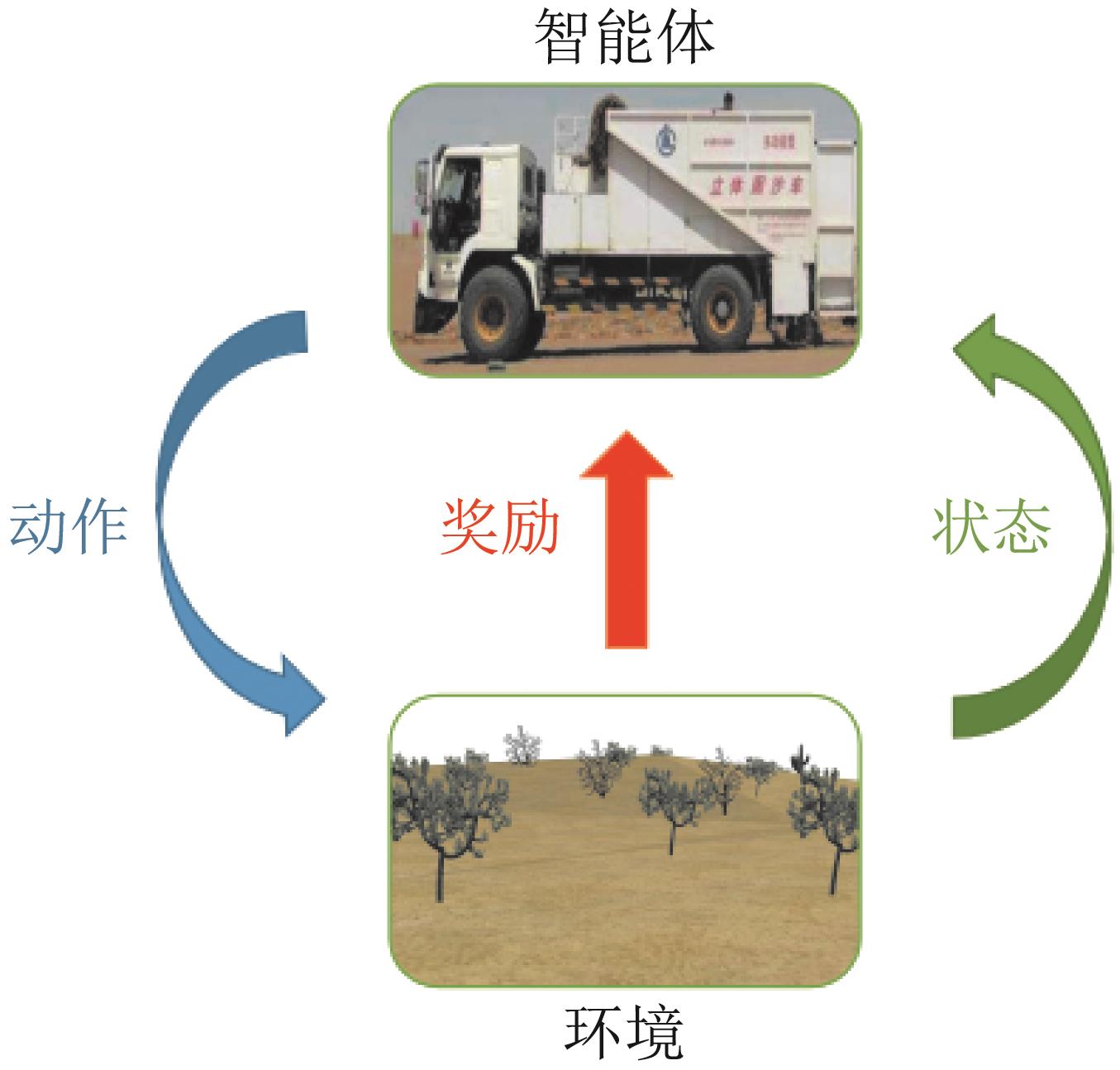

Fig. 2
Neural network structure
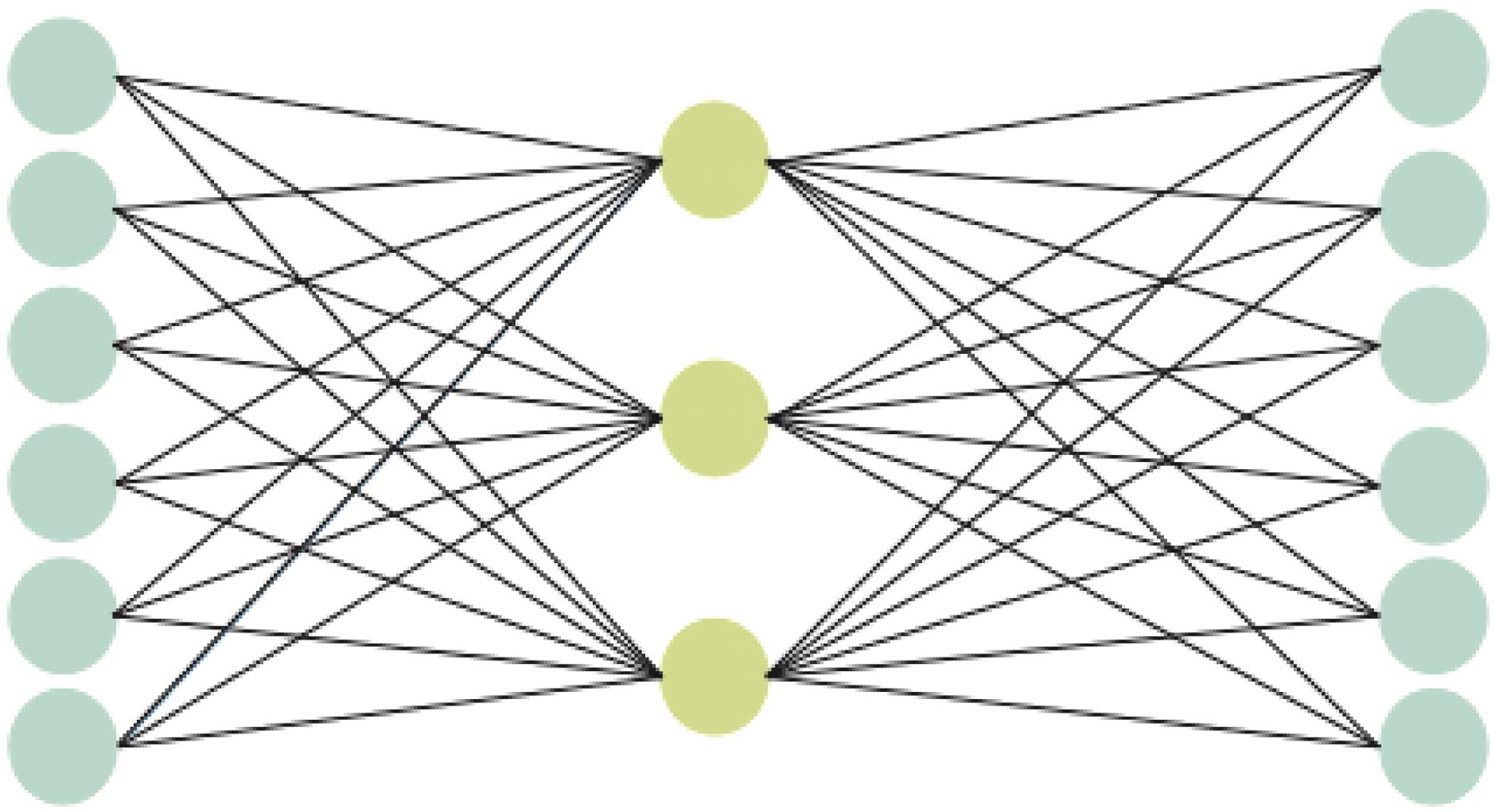
Table 1
Reward value
| 奖励值 | 移动机器人所处状态 |
|---|---|
| r1 | 到达终点 |
| r2 | 发生碰撞 |
| 未发生碰撞 |
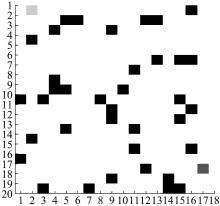
Fig. 3
Grid simulation environment
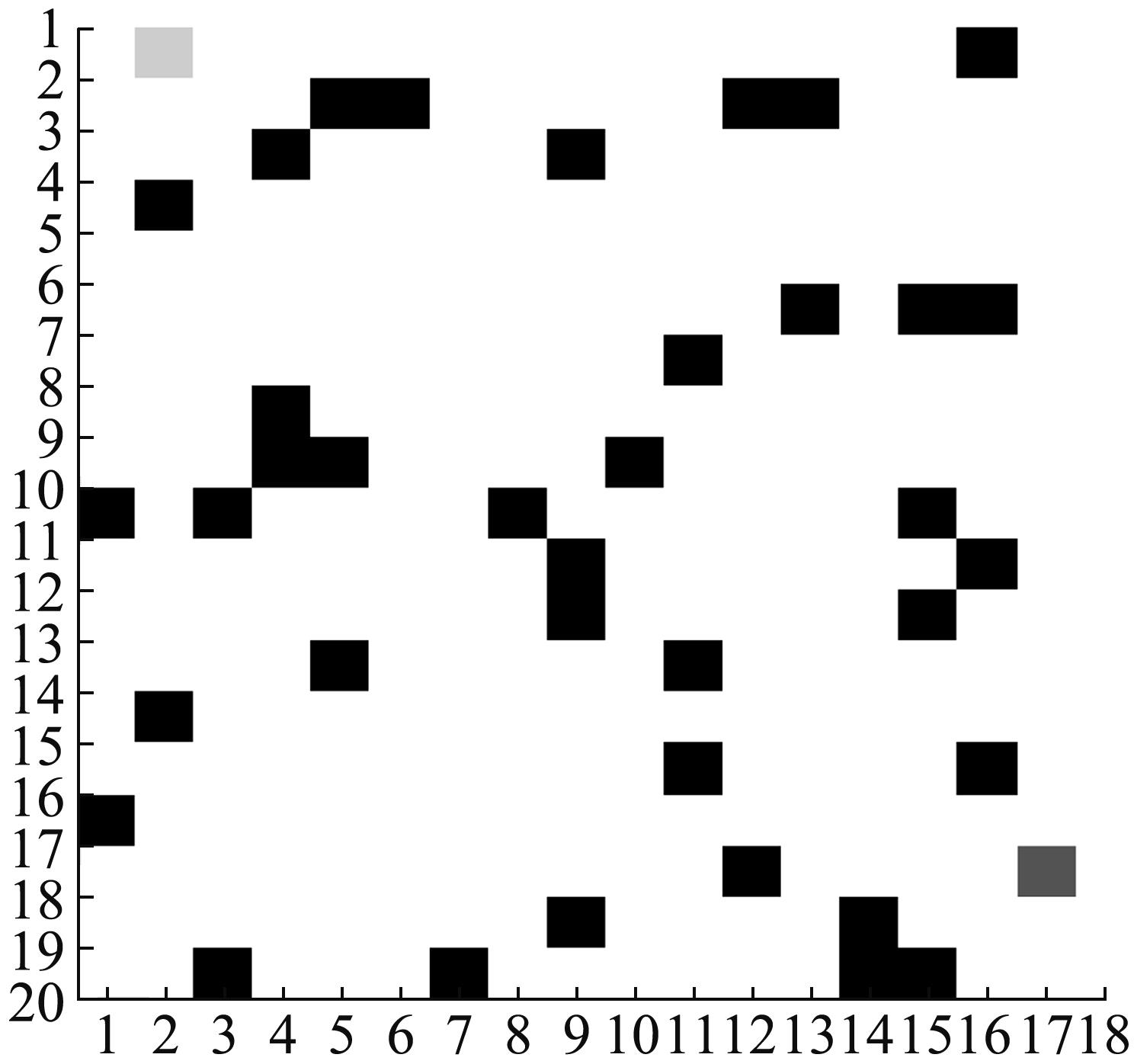
Table 2
Q-learning and DQN algorithm parameter settings
| 参数 | 取值 |
|---|---|
| 奖励值 | 1 |
| 惩罚值 | -1 |
| 学习率 | 0.001 |
| 探索因子 | 0.8 |
| 折扣因子 | 0.9 |
| 最大步长 | 200 |
| 最大迭代次数 | 1 500 |
| 动作选择 | 8 |
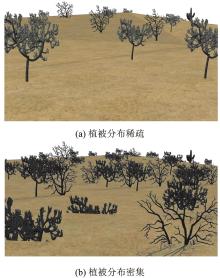
Fig. 4
Vegetation distribution in desert
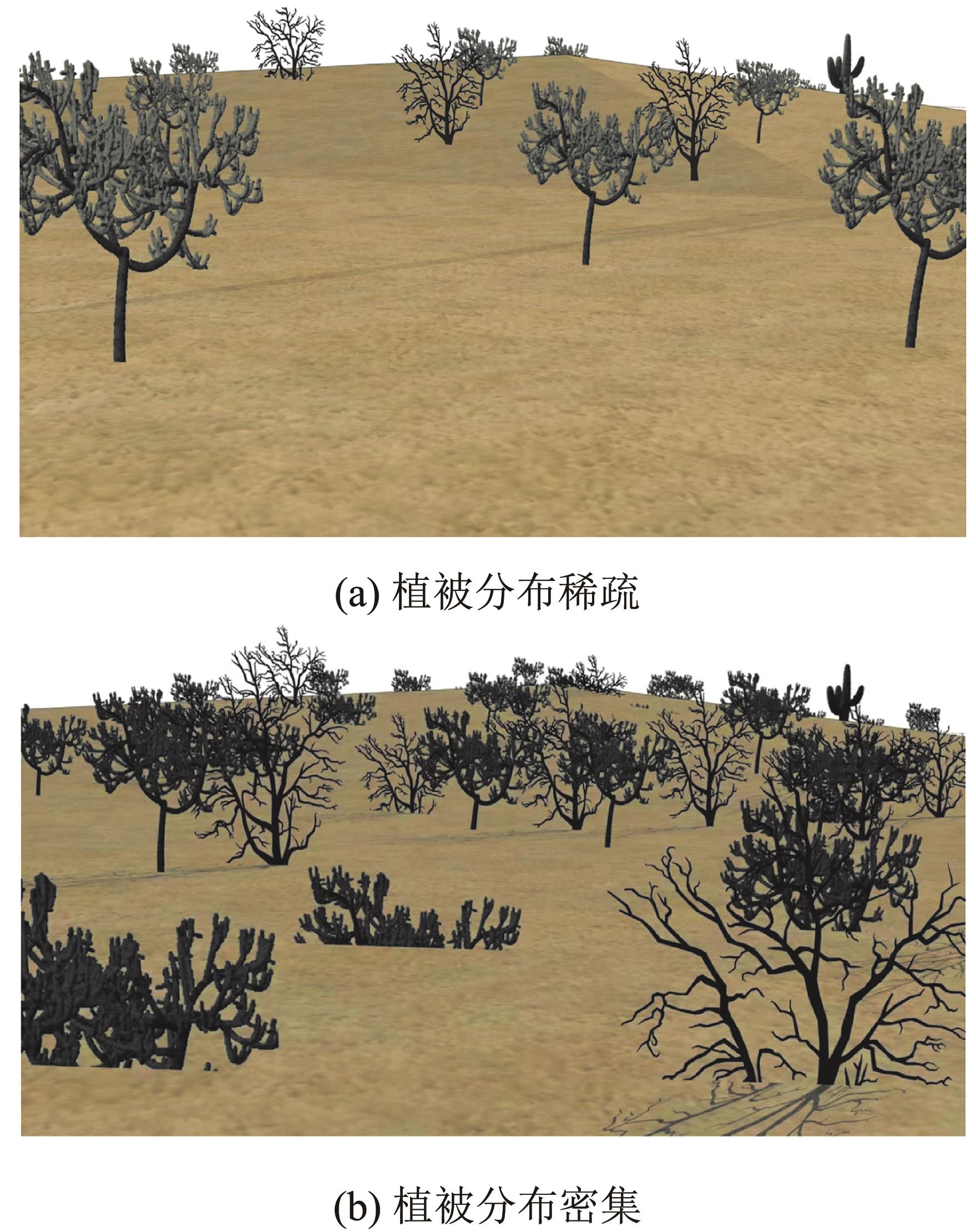
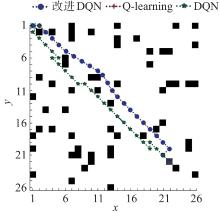
Fig. 5
3 algorithms path planning in experiment I
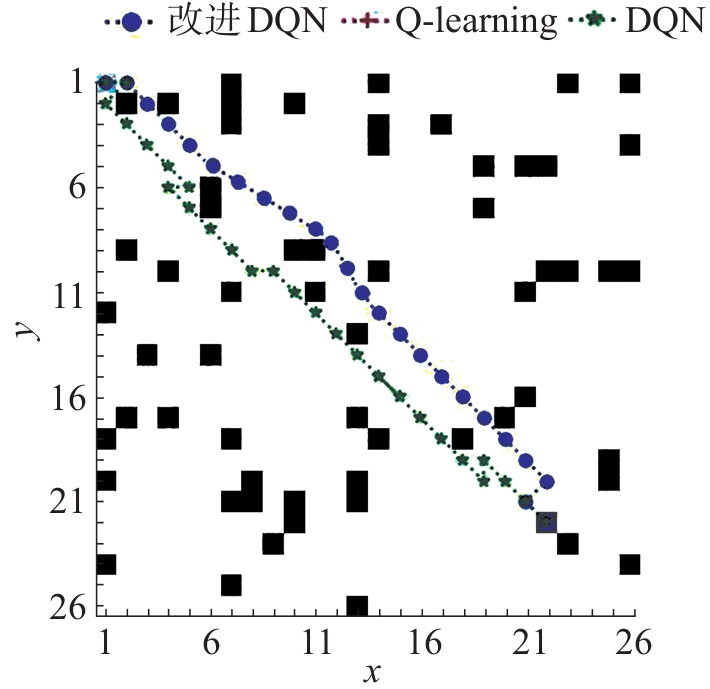

Fig. 6
Reward value changes with number of iteration in experiment I
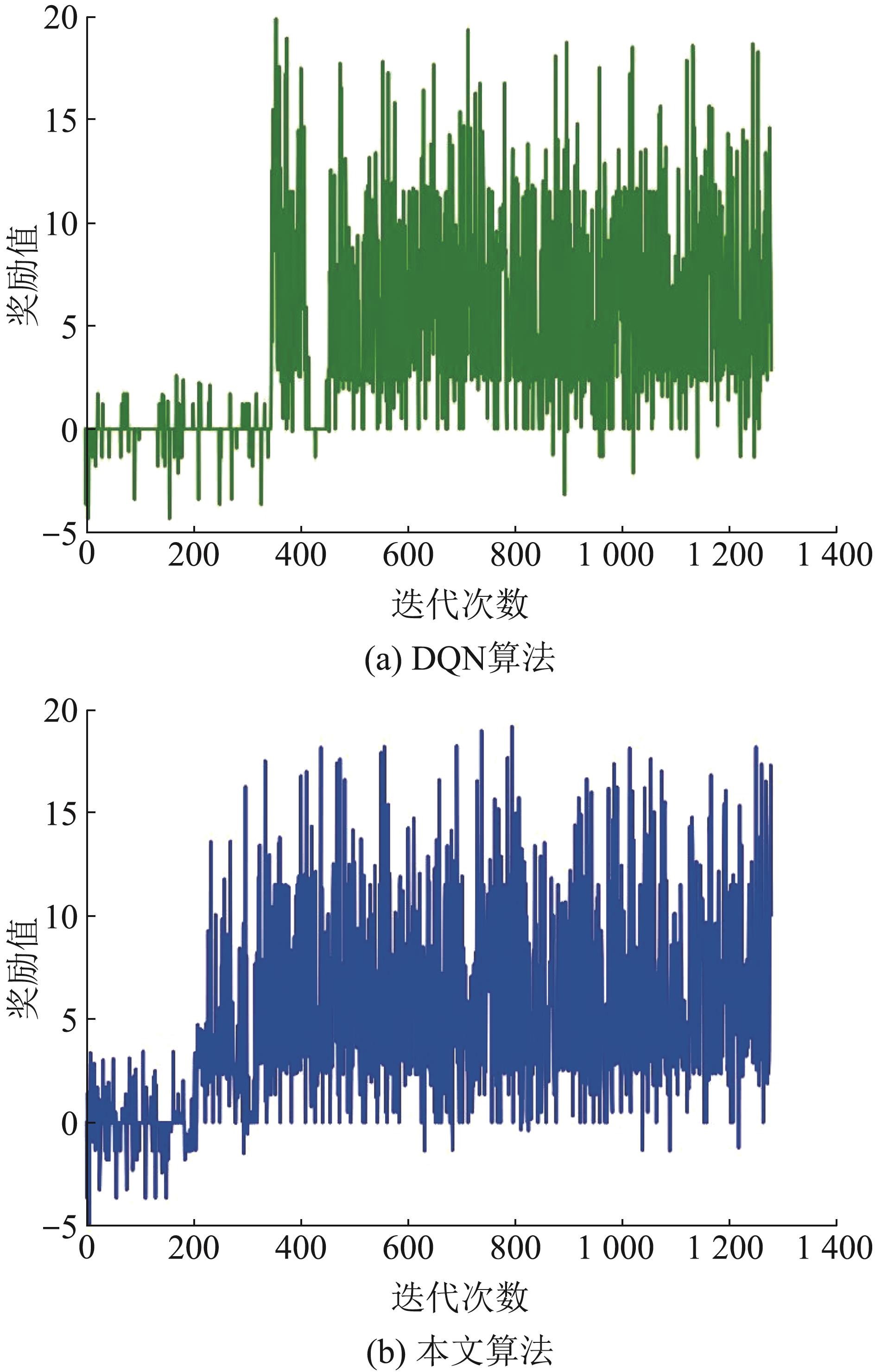
Table 3
Comparison of path length and number of iterations
| 算法 | 路径长度 | 迭代次数 | 时间/s |
|---|---|---|---|
| 减少率/% | 11.9 | 32.6 | 17.4 |
| DQN | 36.97 | 562 | 2.64 |
| 本文 | 32.57 | 379 | 2.18 |
Fig. 7
3 algorithms path planning in experiment II
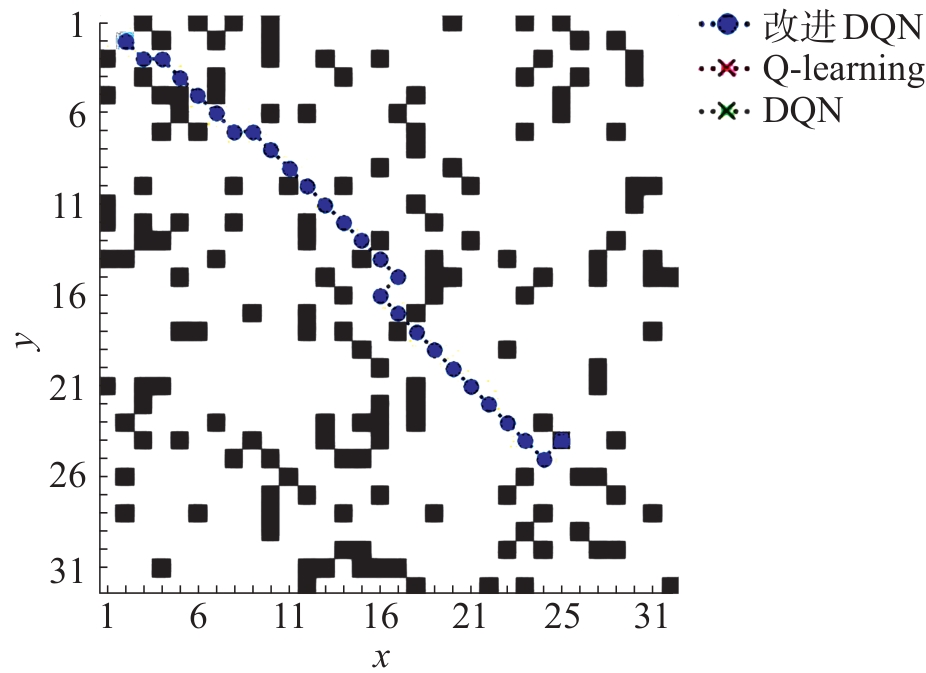

Fig. 8
Reward value changes with number of iterations in experiment II
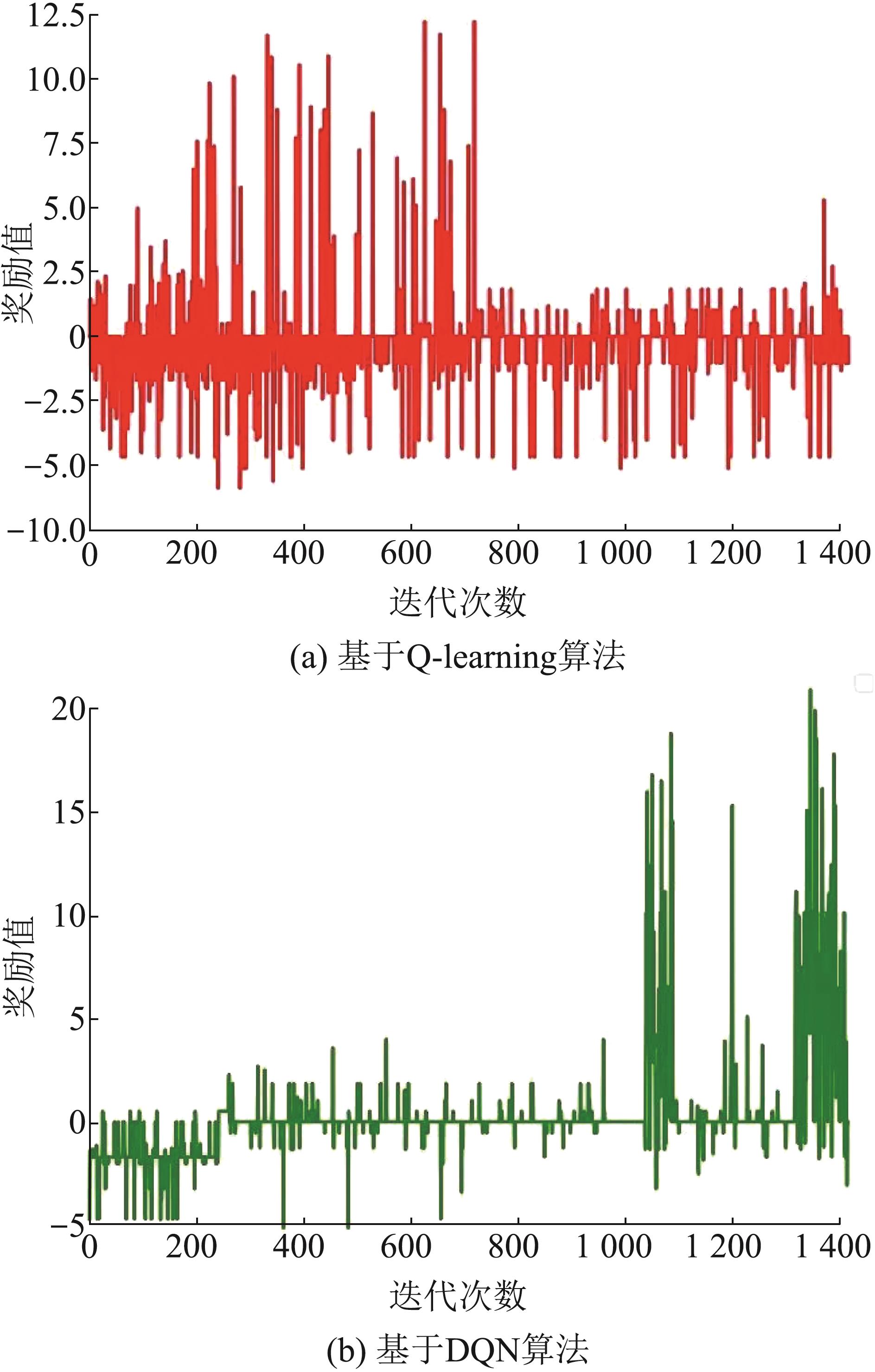

Fig. 9
Actual indoor environment
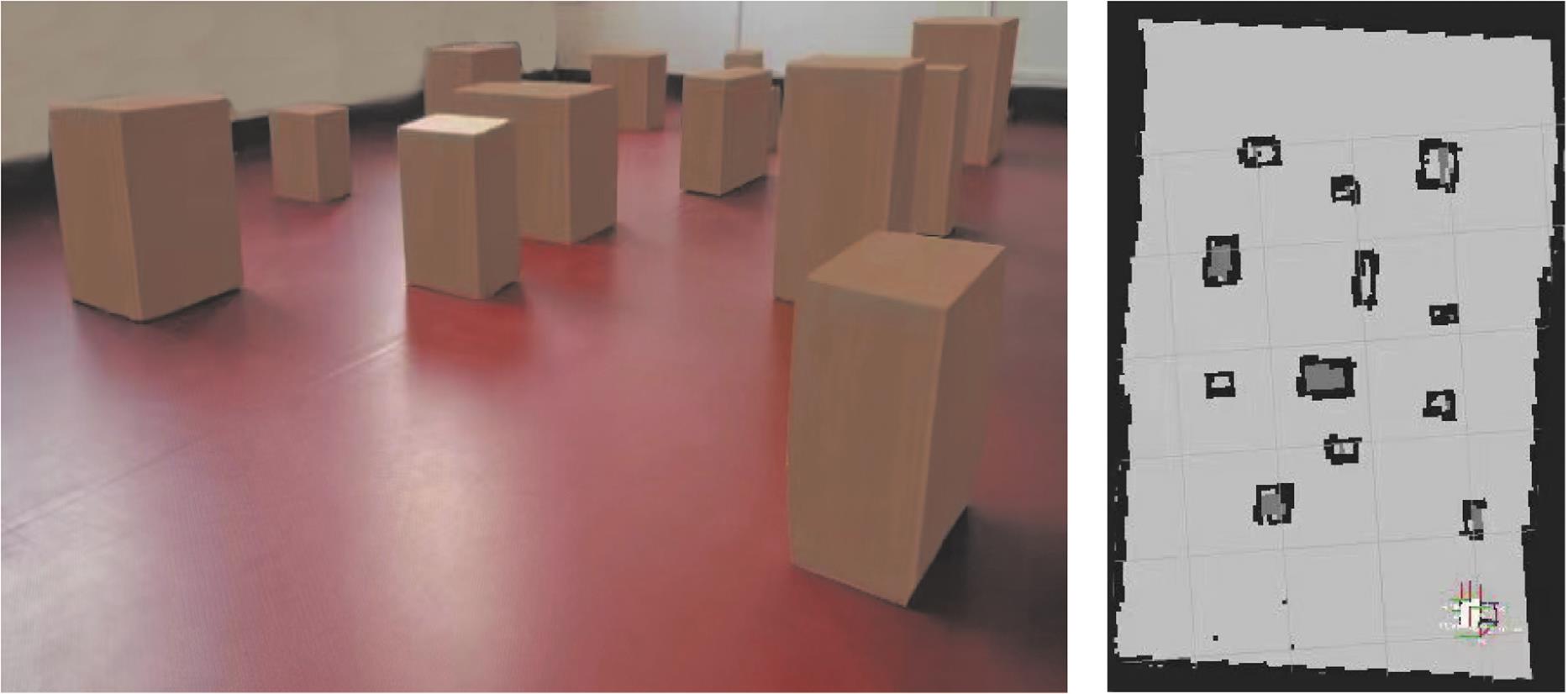
Fig. 10
Comparison of actual environmental path planning
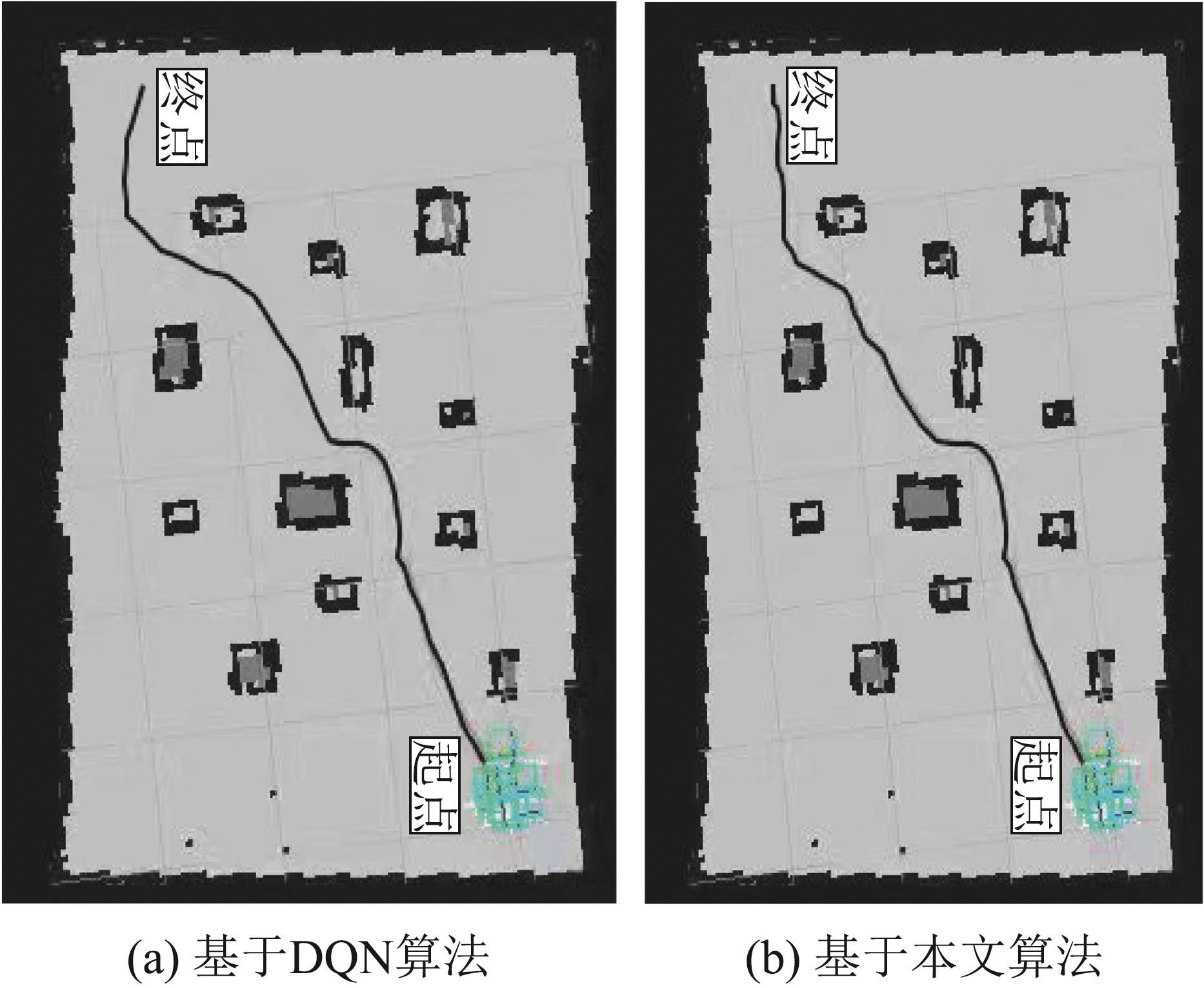
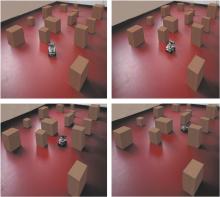
Fig. 11
Obstacle avoidance process
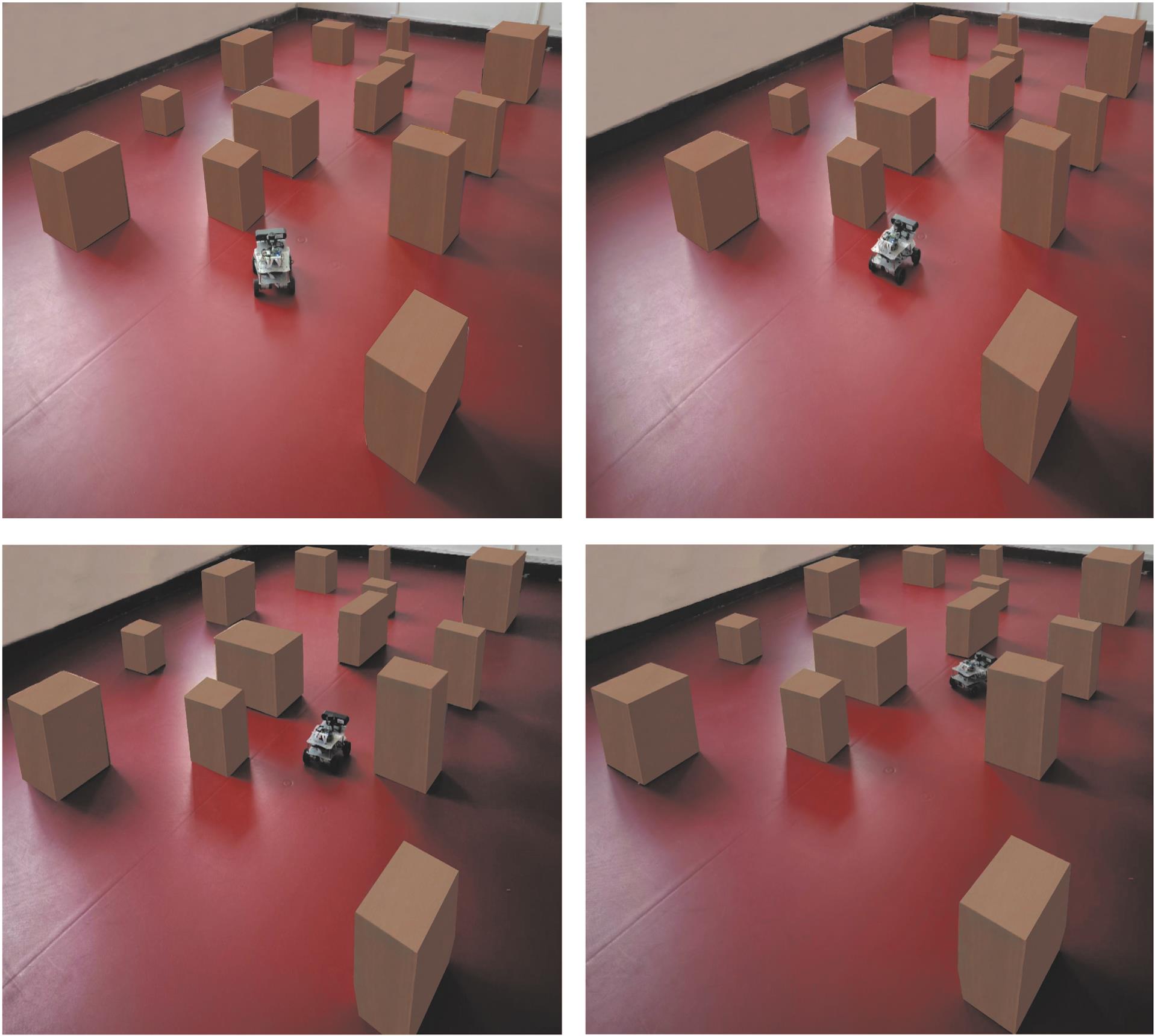
Table 4
Path planning method results comparison
| 算法 | 能否到达目标点 | 规划时间/s | 路径长度/m |
|---|---|---|---|
| Q-learning | 否 | ||
| DQN | 能 | 2.15 | 6.25 |
| 本文 | 能 | 1.72 | 5.96 |
| 1 | 周建秀, 谷雨, 达来, 等. 阿拉善地区荒漠化遥感监测及动态变化[J]. 干旱区资源与环境, 2014, 28(1): 126-130. |
| Zhou Jianxiu, Gu Yu, Lai Da, et al. Monitoring of Desertification and Sandification Status and Dynamic Change with Remote Sensing for Alashan[J]. Journal of Arid Land Resources and Environment, 2014, 28(1): 126-130. | |
| 2 | 张宏巍, 孔祥吉, 卓凌, 等. 荒漠化防治视角下的自然公园规划设计策略研究——以杭锦后旗为例[J]. 干旱区资源与环境, 2020, 34(10): 147-152. |
| Zhang Hongwei, Kong Xiangji, Zhuo Ling, et al. Natural Park Planning and Design Strategy from the Perspective of Desertification Control[J]. Journal of Arid Land Resources and Environment, 2020, 34(10): 147-152. | |
| 3 | 马宗方, 张琳旋, 宋琳, 等. 基于改进动态窗口的车库AGV路径规划及仿真[J/OL]. 系统仿真学报. (2023-10-31) [2023-11-18]. . |
| Ma Zongfang, Zhang Linxuan, Song Lin, et al. Obstacle Avoidance Path Planning and Simulation of Garage AGV Based on Improved DWA[J/OL]. Journal of System Simulation. (2023-10-31) [2023-11-18]. . | |
| 4 | 刘荣华, 王欣, 吴迪, 等. 改进双向动态JPS算法的移动机器人全局路径规划[J]. 计算机应用研究, 2024, 41(4): 1117-1122. |
| Liu Ronghua, Wang Xin, Wu Di, et al. Improved Bidirectional Dynamic JPS Algorithm for Global Path Planning of Mobile Robot[J]. Application Research of Computers, 2024, 41(4): 1117-1122. | |
| 5 | 肖金壮, 余雪乐, 周刚, 等. 一种面向室内AGV路径规划的改进蚁群算法[J]. 仪器仪表学报, 2022, 43(3): 277-285. |
| Xiao Jinzhuang, Yu Xuele, Zhou Gang, et al. An Improved Ant Colony Algorithm for Indoor AGV Path Planning[J]. Chinese Journal of Scientific Instrument, 2022, 43(3): 277-285. | |
| 6 | Yang Hui, Qi Jie, Miao Yongchun, et al. A New Robot Navigation Algorithm Based on a Double-layer Ant Algorithm and Trajectory Optimization[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8557-8566. |
| 7 | 贺勇, 侯体成, 曾子望. 融合改进A*和动态窗口法的无人机路径规划[J/OL]. 机械科学与技术. (2023-10-19) [2023-11-15]. . |
| He Yong, Hou Ticheng, Zeng Ziwang. UAV Path Planning Based on Improved A* and DWA[J/OL]. Mechanical Science and Technology for Aerospace Engineering. (2023-10-19) [2023-11-15]. . | |
| 8 | 李勇, 张朝兴, 柴燎宁. 基于人工势场DDPG算法的移动机械臂协同避障轨迹规划[J/OL]. 计算机集成制造系统. (2023-09-20) [2023-11-10]. . |
| Li Yong, Zhang Chaoxing, Chai Liaoning. Collaborative Obstacle Avoidance Trajectory Planning for Mobile Robotic Arms Based on Artificial Potential Field DDPG Algorithm[J/OL]. Computer Integrated Manufacturing Systems. (2023-09-20) [2023-11-10]. . | |
| 9 | 傅嘉晨, 付润定, 张亚. 基于分布式遗传算法和改进人工势场法的导弹反探测航迹规划[J]. 东南大学学报(自然科学版), 2023, 53(4): 709-717. |
| Fu Jiachen, Fu Runding, Zhang Ya. Anti-reconnaissance Path Planning Technique of Missile Based on Distributed Genetic Algorithm and Improved Artificial Potential Field Method[J]. Journal of Southeast University(Natural Science Edition), 2023, 53(4): 709-717. | |
| 10 | 李远方, 侯军英, 杨永霞, 等. 基于MOPSO和TOPSIS的多目标优化温室黄瓜光环境调控模型[J]. 农业工程学报, 2023, 39(19): 185-194. |
| Li Yuanfang, Hou Junying, Yang Yongxia, et al. Multi-objective Optimization of the Light Environment Regulation Model for Greenhouse Cucumber Using MOPSO and TOPSIS[J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(19): 185-194. | |
| 11 | Liu Mengjuan, Zheng Daiwei, Li Jiaxing, et al. An Ensemble Learning Framework for Click-through Rate Prediction Based on a Reinforcement Learning Algorithm with Parameterized Actions[J]. Knowledge-Based Systems, 2024, 283: 111152. |
| 12 | 黄岩松, 姚锡凡, 景轩, 等. 基于深度Q网络的多起点多终点AGV路径规划[J]. 计算机集成制造系统, 2023, 29(8): 2550-2562. |
| Huang Yansong, Yao Xifan, Jing Xuan, et al. DQN-based AGV Path Planning for Situations with Multi-starts and Multi-targets[J]. Computer Integrated Manufacturing Systems, 2023, 29(8): 2550-2562. | |
| 13 | Luíza Caetano Garaffa, Basso Maik, Andréa Aparecida Konzen, et al. Reinforcement Learning for Mobile Robotics Exploration: A Survey[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(8): 3796-3810. |
| 14 | 林歆悠, 叶卓明, 周斌豪. 基于DQN强化学习的自动驾驶转向控制策略[J]. 机械工程学报, 2023, 59(16): 315-324. |
| Lin Xinyou, Ye Zhuoming, Zhou Binhao. DQN Reinforcement Learning-based Steering Control Strategy for Autonomous Driving[J]. Journal of Mechanical Engineering, 2023, 59(16): 315-324. | |
| 15 | Xin Jing, Zhao Huan, Liu Ding, et al. Application of Deep Reinforcement Learning in Mobile Robot Path Planning[C]//2017 Chinese Automation Congress (CAC). Piscataway: IEEE, 2017: 7112-7116. |
| 16 | 尹旷, 王红斌, 方健, 等. 基于强化学习的移动机器人路径规划优化[J]. 电子测量技术, 2021, 44(10): 91-95. |
| Yin Kuang, Wang Hongbin, Fang Jian, et al. Optimization of Robot Path Planning Based on Reinforcement Learning[J]. Electronic Measurement Technology, 2021, 44(10): 91-95. | |
| 17 | 罗国攀, 张国良, 李德胜. 基于深度强化学习的移动机器人路径规划优化[J]. 组合机床与自动化加工技术, 2023(4): 36-39, 45. |
| Luo Guopan, Zhang Guoliang, Li Desheng. Path Planning Optimization of Mobile Robots Based on Deep Reinforcement Learning[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2023(4): 36-39, 45. | |
| 18 | 李辉, 祁宇明. 一种复杂环境下基于深度强化学习的机器人路径规划方法[J]. 计算机应用研究, 2020, 37(增1): 129-131. |
| Li Hui, Qi Yuming. Robot Path Planning Method Based on Deep Reinforcement Learning in Complex Environment[J]. Application Research of Computers, 2020, 37(S1): 129-131. | |
| 19 | 李子怡, 胡祥涛, 张勇乐, 等. 基于虚拟目标制导的自适应Q学习路径规划算法[J]. 计算机集成制造系统, 2024, 30(2): 553-568. |
| Li Ziyi, Hu Xiangtao, Zhang Yongle, et al. Adaptive Q-learning Path Planning Algorithm Based on Virtual Target Guidance[J]. Computer Integrated Manufacturing Systems, 2024, 30(2): 553-568. | |
| 20 | 王越龙, 王松艳, 晁涛. 基于多步信息辅助的Q-learning路径规划算法[J/OL]. 系统仿真学报. (2023-09-08) [2023-11-18]. . |
| Wang Yuelong, Wang Songyan, Chao Tao. Multi-step Information Aided Q-learning Path Planning Algorithm[J/OL]. Journal of System Simulation. (2023-09-08) [2023-11-18]. . | |
| 21 | 宋丽君, 周紫瑜, 李云龙, 等. 改进Q-Learning的路径规划算法研究[J]. 小型微型计算机系统, 2024, 45(4): 823-829. |
| Song Lijun, Zhou Ziyu, Li Yunlong, et al. Research on Path Planning Algorithm Based on Improved Q-learning Algorithm[J]. Journal of Chinese Computer Systems, 2024, 45(4): 823-829. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Zhang Dingkun, Liang Haizhao. Hierarchical Motion Planning of Mobile Robot Based on Dynamic Corridor Inflation and Convex Optimization [J]. Journal of System Simulation, 2026, 38(5): 1383-1407. |
| [3] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [4] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [5] | Wang Xueqian, Men Jianbing, Zhou Xin, Wang Shuyou, Li Mei. A Precise Damage Assessment Method for Lethal Blast Warheads Against Quadruped Robots [J]. Journal of System Simulation, 2026, 38(3): 702-713. |
| [6] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [7] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [8] | Zhang Ziyao, Ji Yunfeng. Simulation of Robotic Arm Ball-catching Strategy Based on Curriculum RL of Transformer [J]. Journal of System Simulation, 2026, 38(2): 321-331. |
| [9] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [10] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [11] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [12] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [13] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [14] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [15] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
