

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (7): 1586-1595.doi: 10.16182/j.issn1004731x.joss.23-0360
Previous Articles Next Articles
Zhang Zhenli1,2( ), Wang Yongzhuang1,2, Qin Yao1,2, Yang Jie1,2
), Wang Yongzhuang1,2, Qin Yao1,2, Yang Jie1,2
Received:2023-04-03
Revised:2023-05-11
Online:2024-07-15
Published:2024-07-12
CLC Number:
Zhang Zhenli, Wang Yongzhuang, Qin Yao, Yang Jie. Maglev Ball Control Algorithm Based on Levant Differentiator[J]. Journal of System Simulation, 2024, 36(7): 1586-1595.
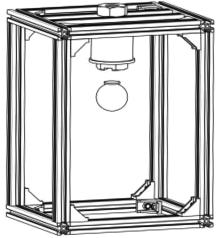
Fig. 1
PEMS system platform structure
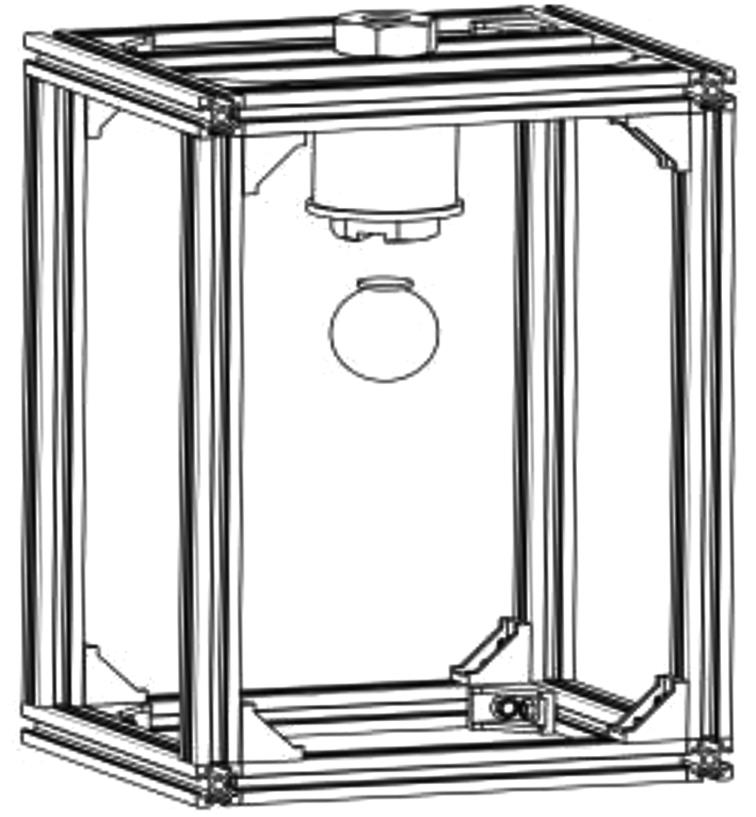
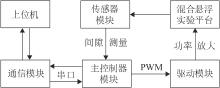
Fig. 2
Control block of PEMS system
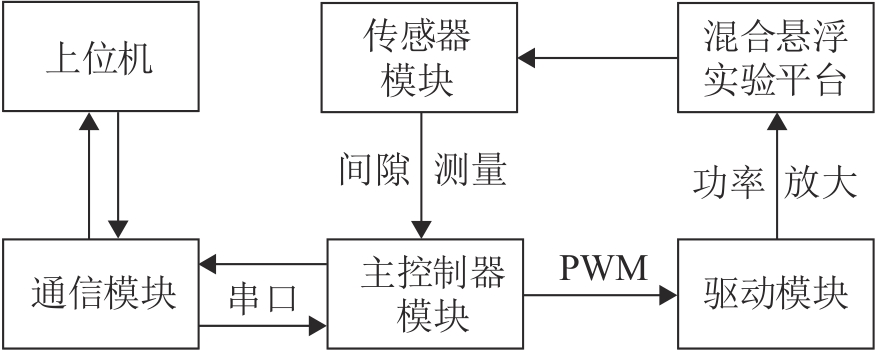
Table 1
Single-point PEMS system platform parameters
| 符号 | 含义 | 取值 |
|---|---|---|
| m/kg | 钢球质量 | 11.5 |
| N | 电磁铁线圈匝数 | 500 |
| R/Ω | 总电阻 | 10 |
| S/(mm2) | 电磁铁磁极面积 | 415.48 |
| hmp/mm | 永磁体厚度 | 30 |
| μ0/(H/m) | 真空磁导率 | 4π×10-7 |
| i0/A | 平衡点电流 | 0 |
| Hc/(A/m) | 永磁体矫顽力 | 800×103 |
| μr | 永磁体相对磁导率 | 1 |
| x0/mm | 平衡气隙 | 15 |
Fig. 3
Performance comparison of soft transition Levant differentiator and improved Levant differentiator without noise
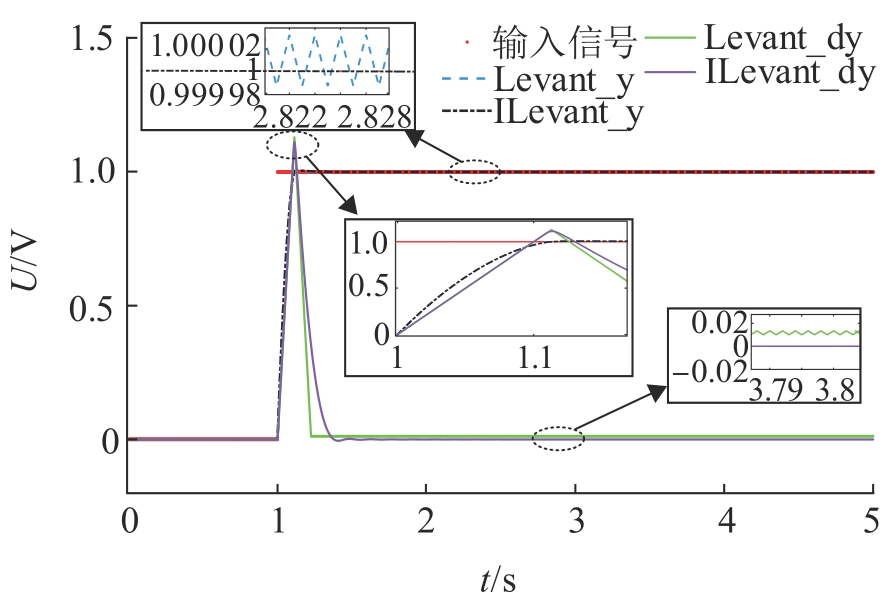
Fig. 4
Performance comparison of soft transition Levant differentiator and improved Levant differentiator with noise interference
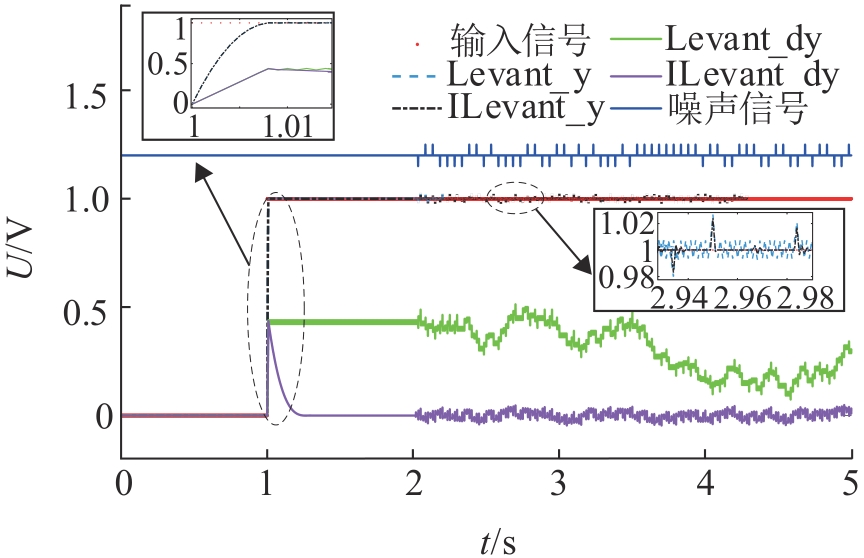

Fig. 5
ILevant-PID controller structure
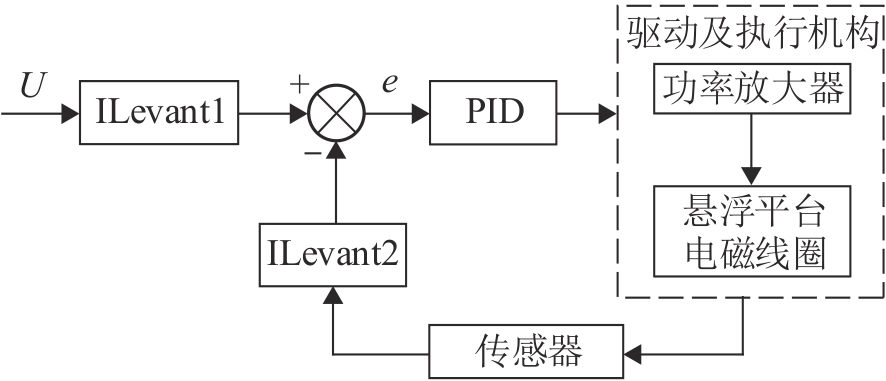
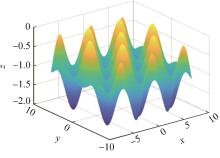
Fig. 6
Griewank test function image
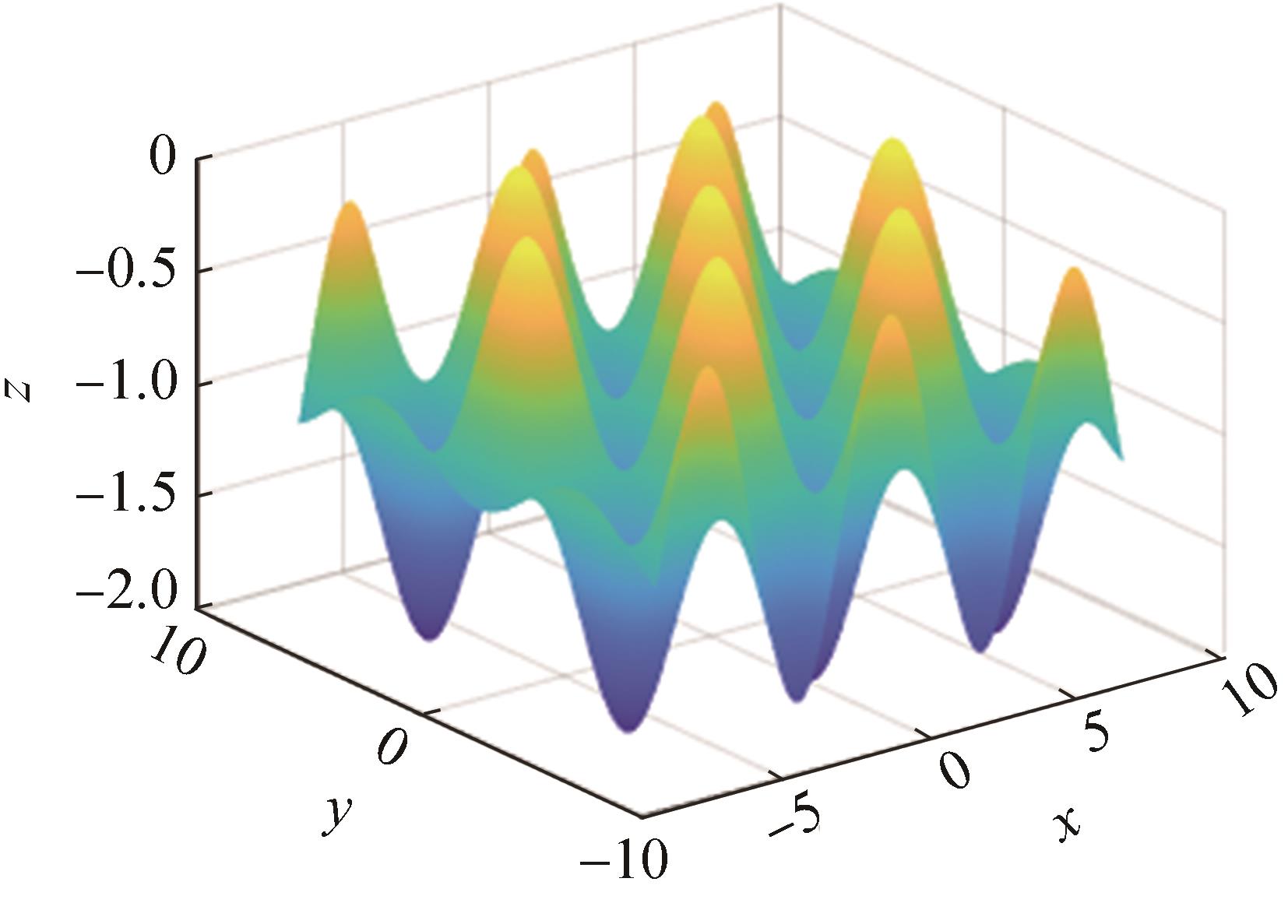
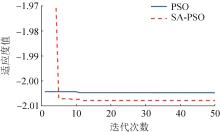
Fig. 7
Fitness curves of two optimization algorithms
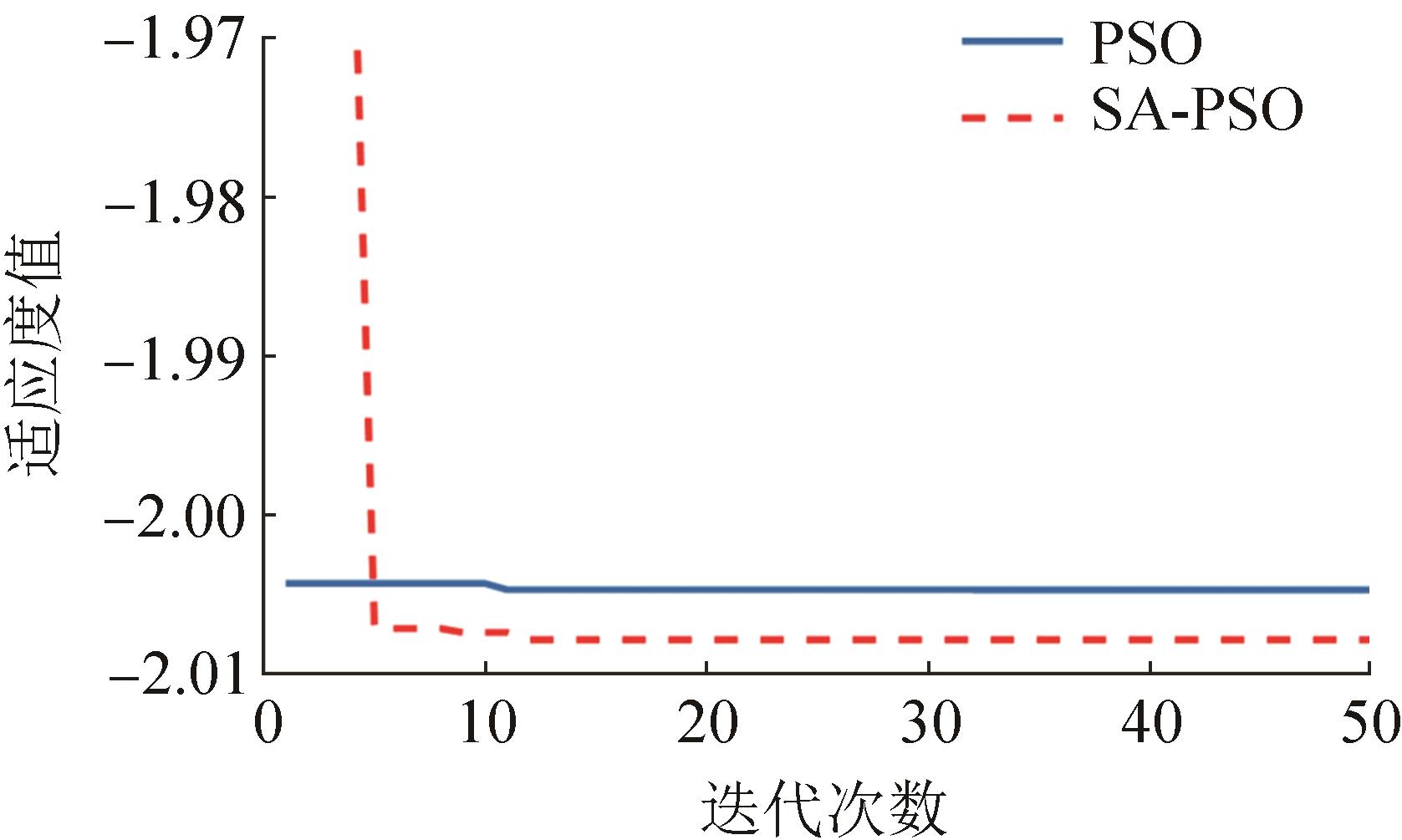
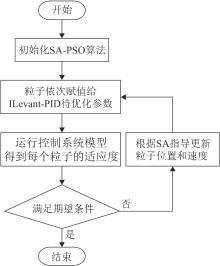
Fig. 8
Parameter optimization process of SA-PSO algorithm
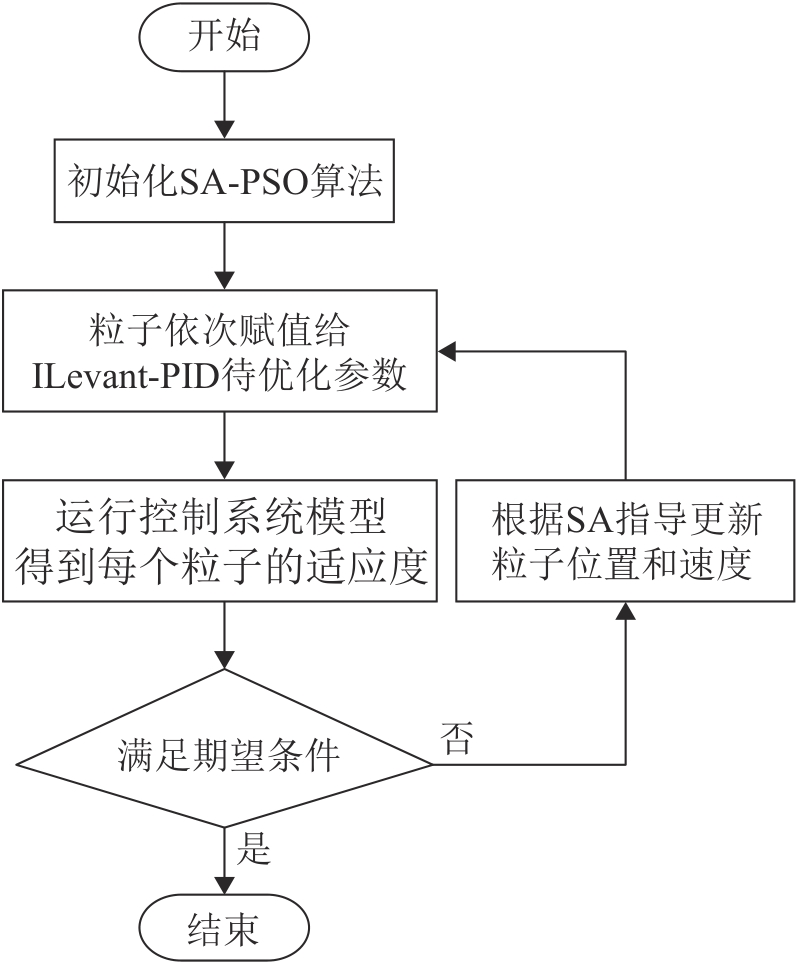
Table 2
Parameters of SA-PSO algorithm
| 序号 | 符号 | 含义 | 数值 |
|---|---|---|---|
| 1 | M | 最大迭代次数 | 90 |
| 2 | N | 种群个体数目 | 80 |
| 3 | c1 | 学习因子1 | 1.8 |
| 4 | c2 | 学习因子2 | 1.8 |
| 5 | T0 | 模拟退火初始温度 | 1 000 |
| 6 | 退火常数惯性权重 | 0.8 |
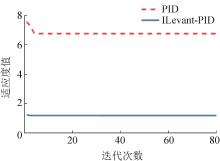
Fig. 9
Controller parameters set fitness curves
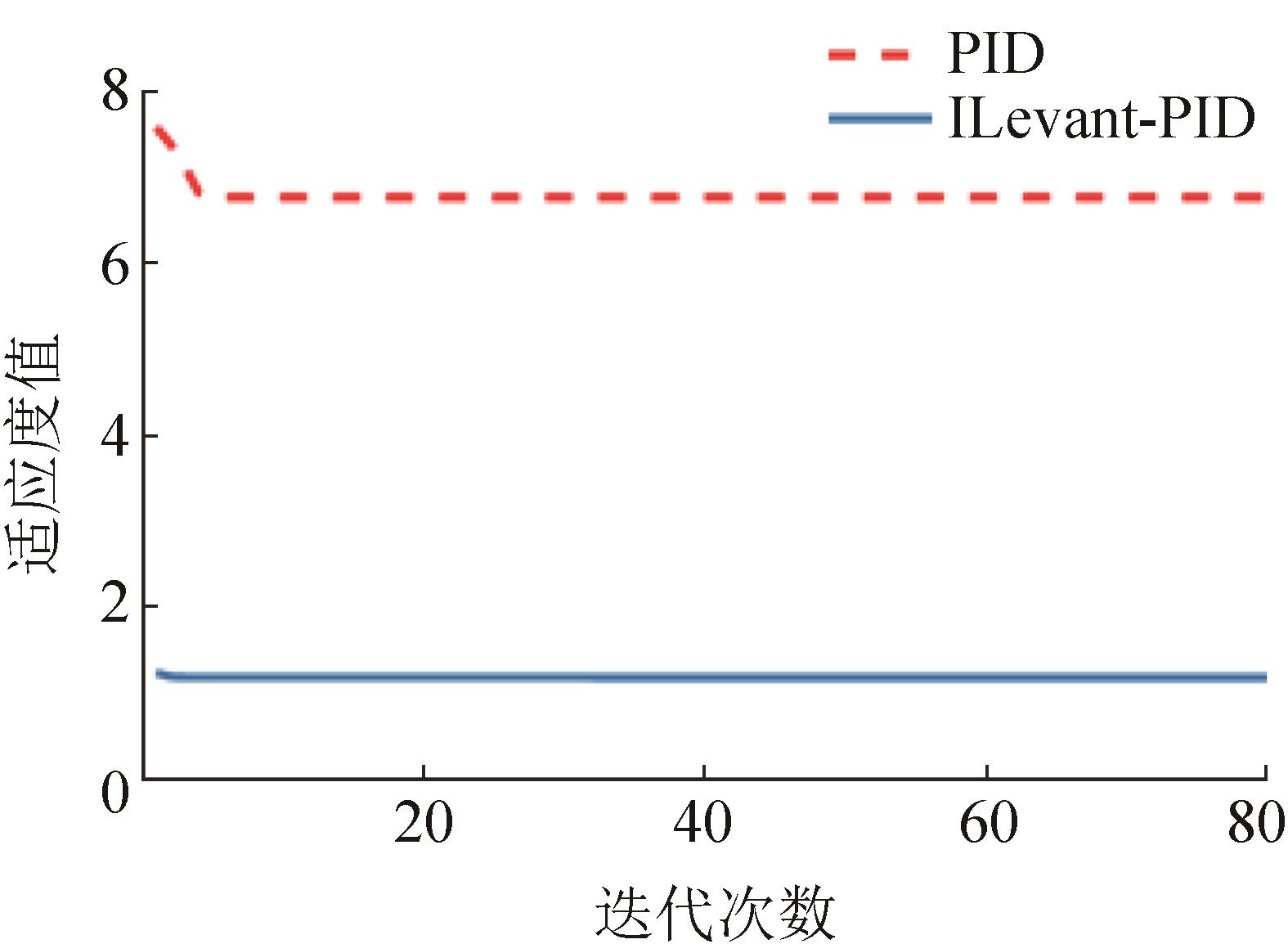
Table 3
Controller simulation parameters
| 控制器 | 参数 | 数值 |
|---|---|---|
| PID | 8 078.858 | |
| 352 338.134 | ||
| 200.114 | ||
| ILevant-PID | 8 078.858 | |
| 352 338.134 | ||
| 200.114 | ||
| 17.995 | ||
| 53.272 | ||
| 35.995 | ||
| 601.221 |
Fig. 10
Two controller response curves under step signal
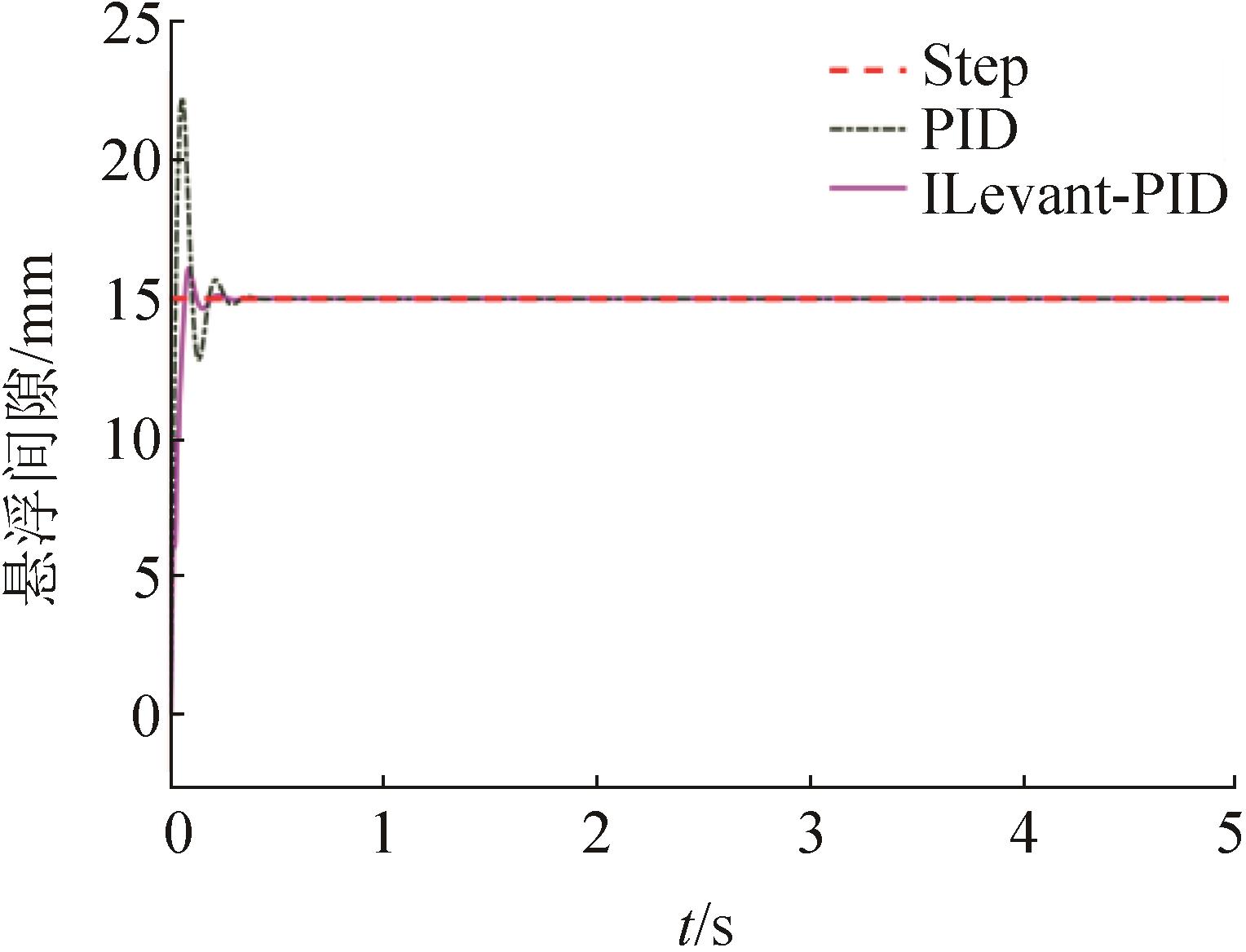
Fig. 11
Response curves of two controllers with noise interference
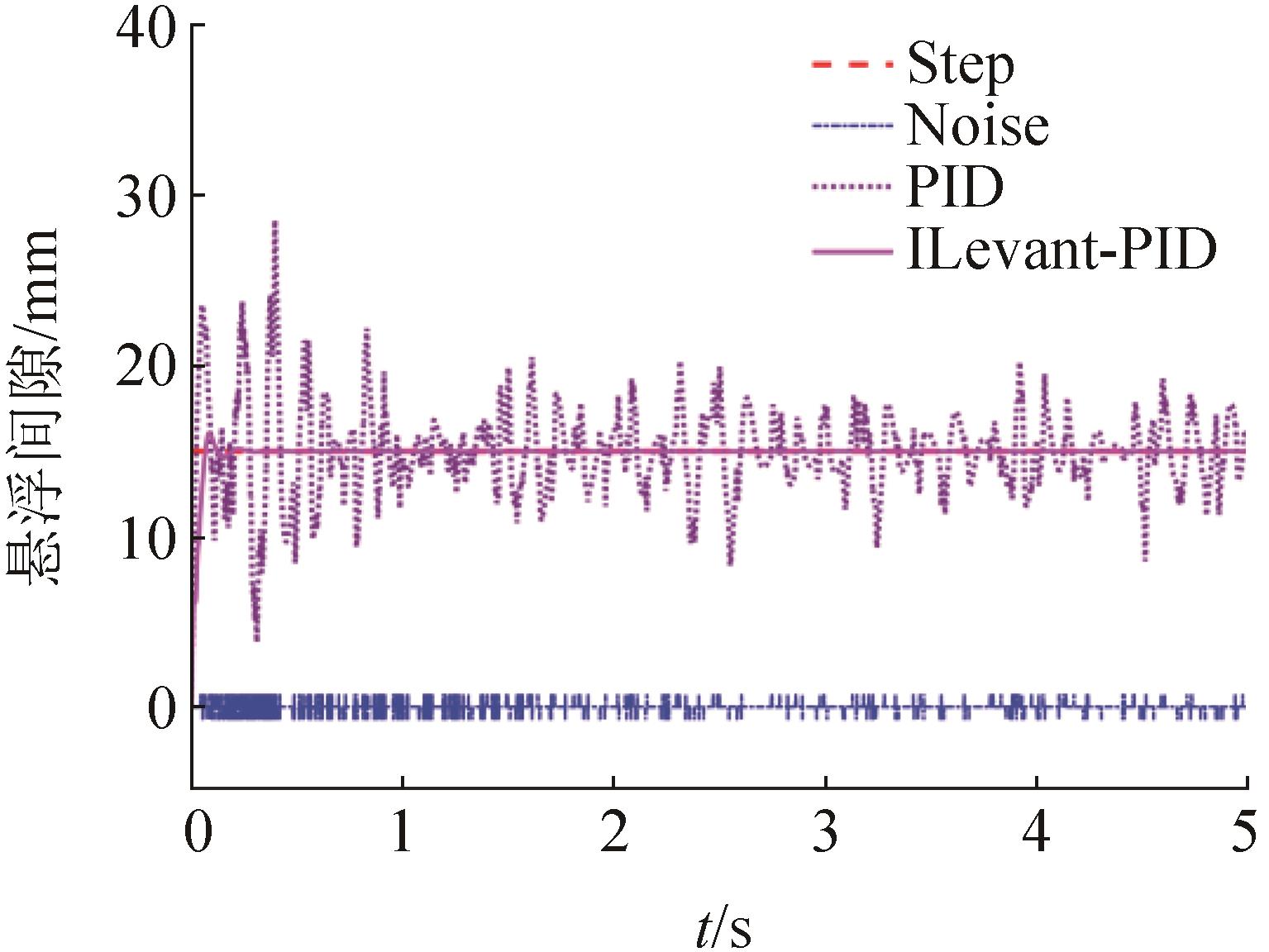
Table 4
Comparison of simulation results of two controllers
信号 类型 | 控制 方法 | 调节 时间/s | 超调 量/% | 稳态 误差/% |
|---|---|---|---|---|
| 阶跃 | PID | 0.335 | 47.935 | 0 |
| Levant-PID | 0.197 | 7.573 | 0 | |
| 噪声输入 | PID | ∞ | 58.773 | 24.571 |
| Levant-PID | 0.261 | 7.623 | 0.383 |

Fig. 12
Structure block of PEMS system semi-physical simulation platform
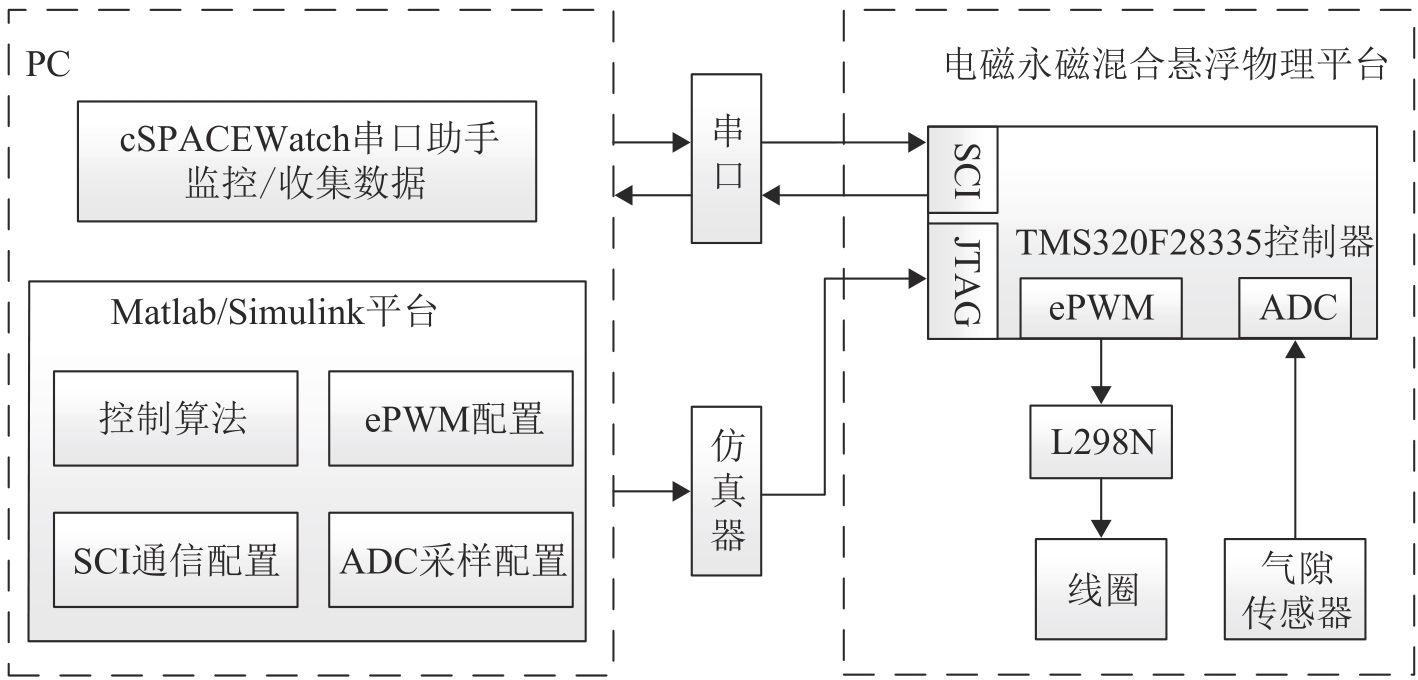
Fig. 13
Suspension gap measurement results
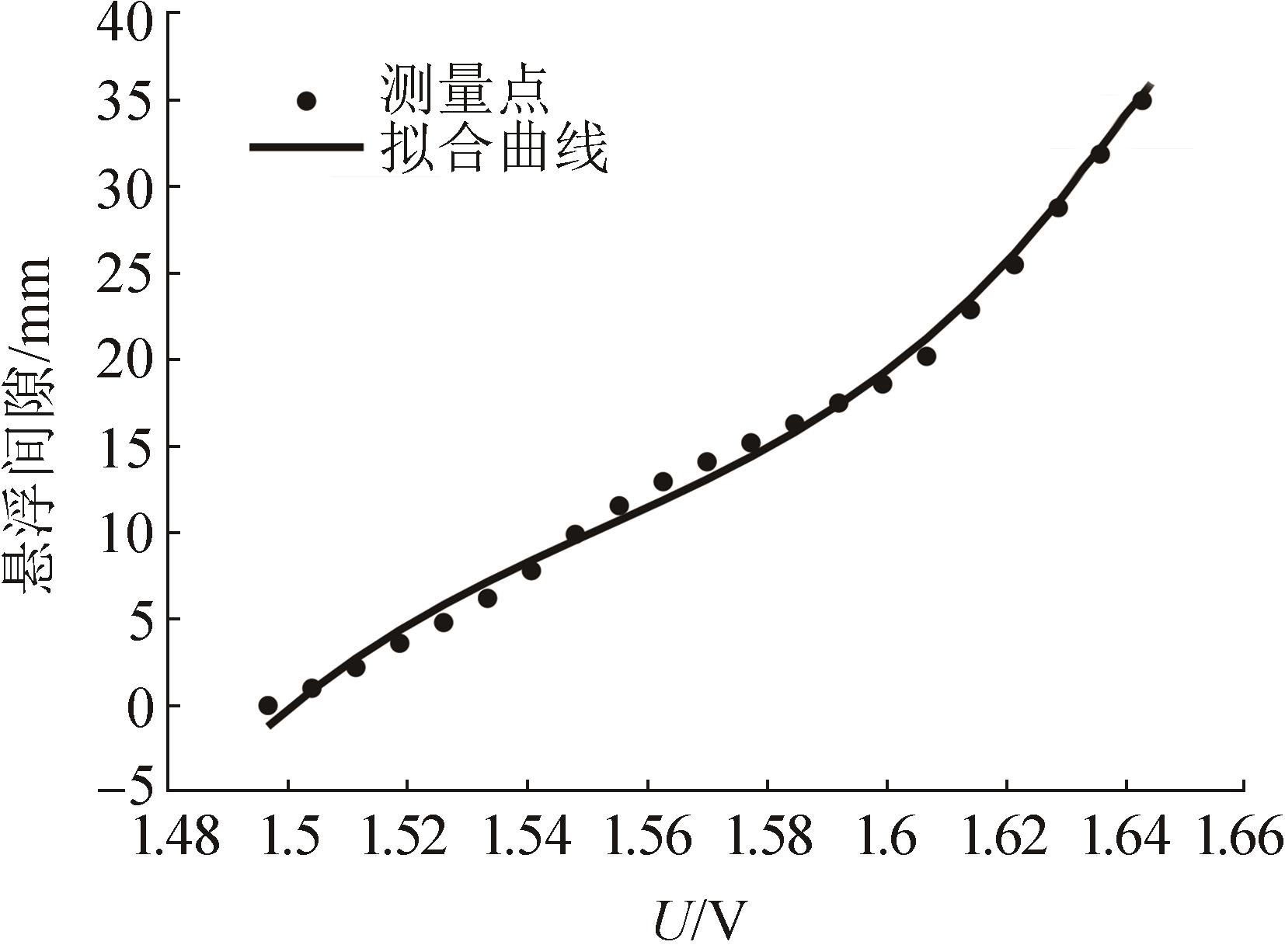
Table 5
Experiment parameters of controller
| 控制器 | 参数 | 数值 |
|---|---|---|
| PID | 3 000 | |
| 50 030 | ||
| 100 | ||
| ILevant-PID | 3 000 | |
| 5 000 | ||
| 50 | ||
| 17.995 | ||
| 100 | ||
| 35.995 | ||
| 500 |

Fig. 14
Levitation diagram of single point PEMS system
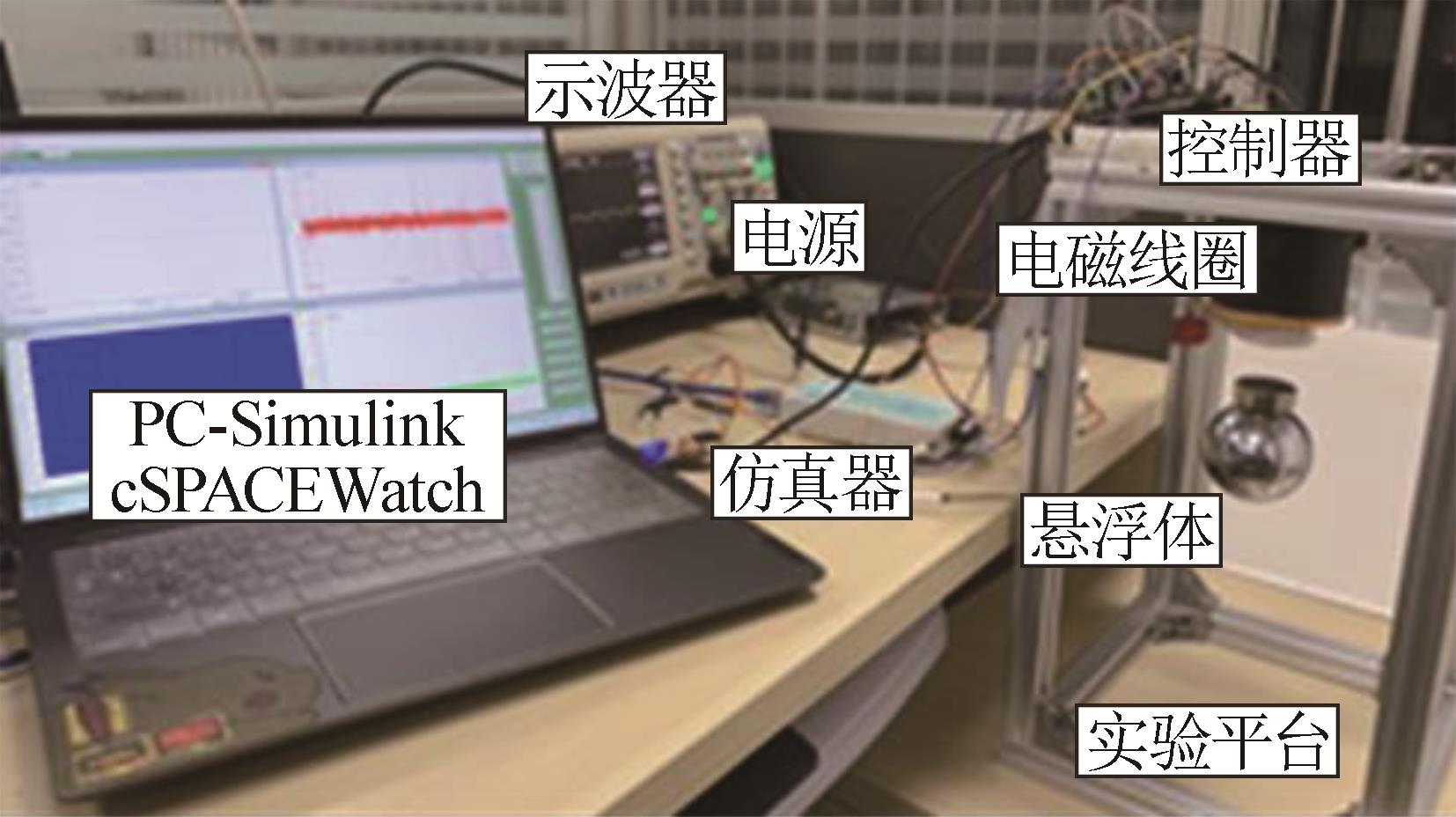

Fig. 15
Response trajectory of suspended body at constant gap without noise
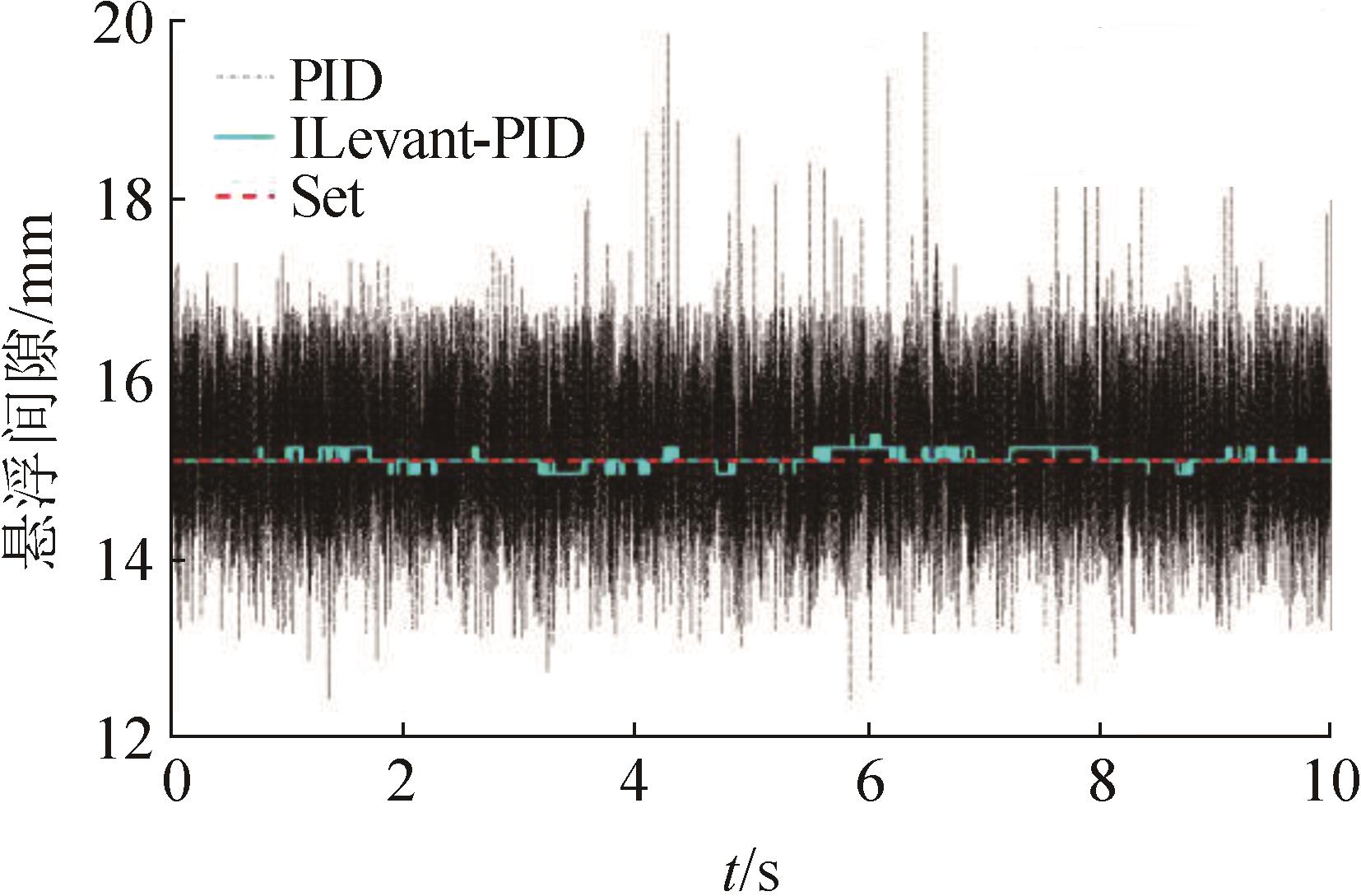
Fig. 16
Response trajectory of suspended body under noise interference
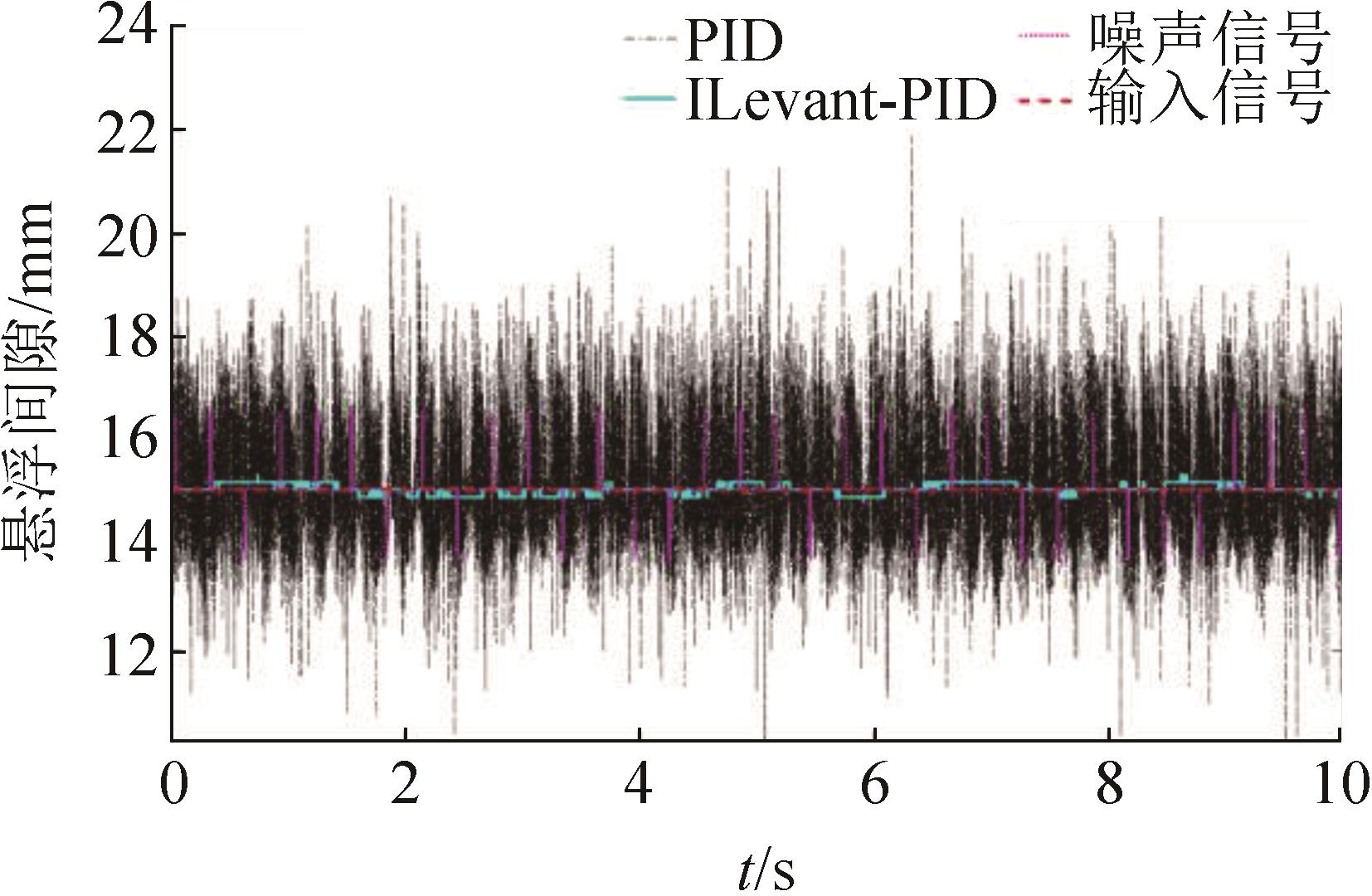
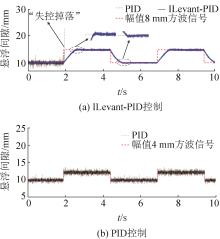
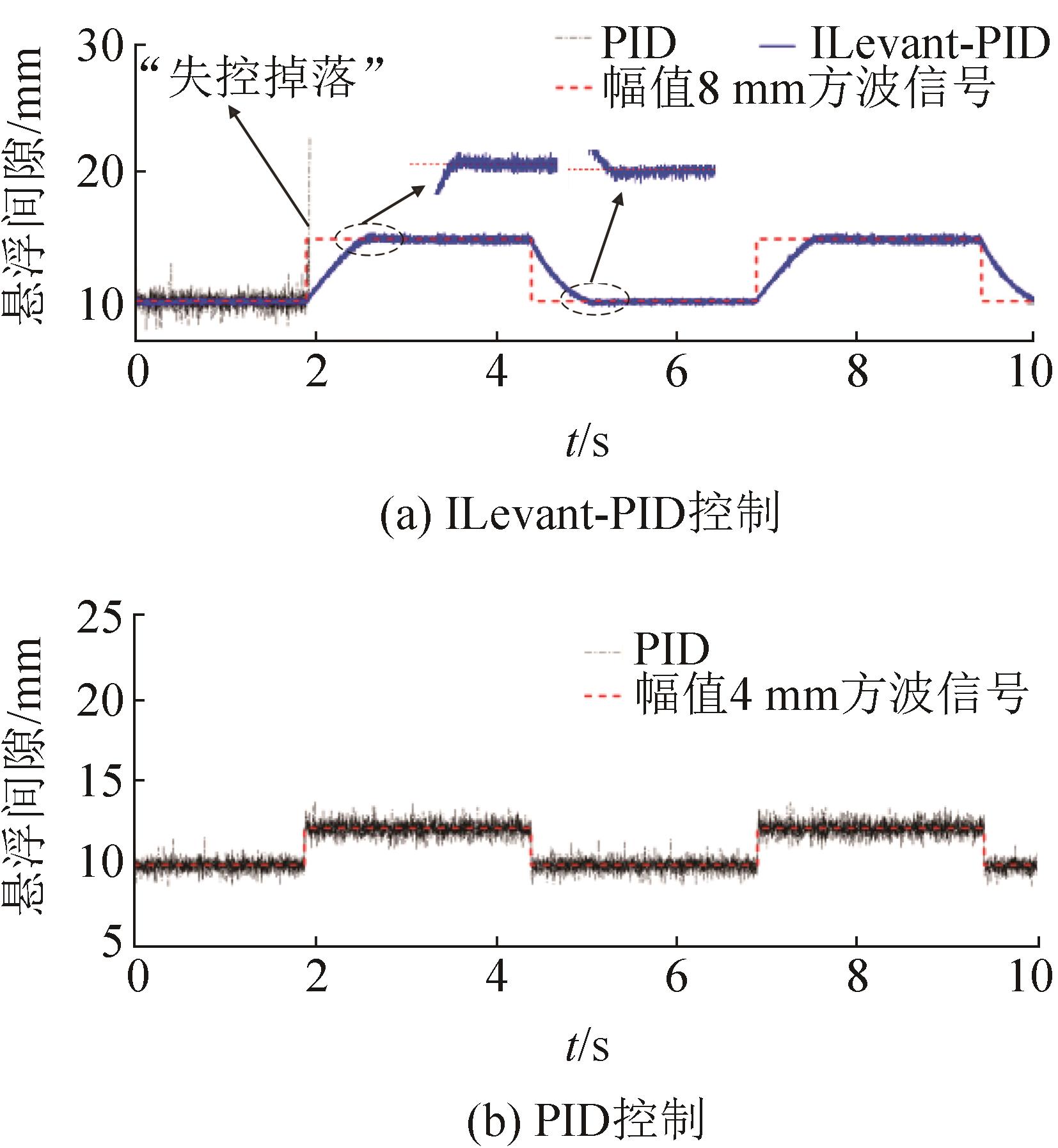
Fig. 17
Response trajectory of suspension tracking square wave signal
| 1 | 黎松奇, 张昆仑, 刘国清, 等. EMS型磁浮列车上下坡过程仿真研究[J]. 系统仿真学报, 2016, 28(1): 255-260. |
| Li Songqi, Zhang Kunlun, Liu Guoqing, et al. Simulation Research of Maglev Train During Uphill and Downhill Process[J]. Journal of System Simulation, 2016, 28(1): 255-260. | |
| 2 | 吕治国, 龙志强. 磁悬浮球系统的非线性自适应控制方法[J]. 控制工程, 2020, 27(1): 127-133. |
| Zhiguo Lü, Long Zhiqiang. Method on Nonlinear Adaptive Controller for Maglev Levitation Ball System[J]. Control Engineering of China, 2020, 27(1): 127-133. | |
| 3 | 钟志贤, 蔡忠侯, 祁雁英. 单自由度磁悬浮系统无模型自适应控制的研究[J]. 西南交通大学学报, 2022, 57(3): 549-557, 581. |
| Zhong Zhixian, Cai Zhonghou, Qi Yanying. Model-free Adaptive Control for Single-degree-of-freedom Magnetically Levitated System[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 549-557, 581. | |
| 4 | 王莉, 张昆仑. 基于零功率控制策略的混合磁悬浮系统[J]. 西南交通大学学报, 2005, 40(5): 667-672. |
| Wang Li, Zhang Kunlun. Hybrid Magnetic Suspension System Based on Zero Power Control Strategy[J]. Journal of Southwest Jiaotong University, 2005, 40(5): 667-672. | |
| 5 | 龙鑫林, 佘龙华, 常文森. 电磁永磁混合型EMS磁悬浮非线性控制算法研究[J]. 铁道学报, 2011, 33(9): 36-39. |
| Long Xinlin, She Longhua, Chang Wensen. Study on Nonlinear Control Method for Hybrid EMS Maglev Train[J]. Journal of the China Railway Society, 2011, 33(9): 36-39. | |
| 6 | Gao Tao, Yang Jie, Jia Limin, et al. Design of New Energy-efficient Permanent Magnetic Maglev Vehicle Suspension System[J]. IEEE Access, 2019, 7: 135917-135932. |
| 7 | 朱斌. 自抗扰控制入门[M]. 北京: 北京航空航天大学出版社, 2017. |
| 8 | 王莉, 熊剑, 张昆仑, 等. 永磁和电磁构成的混合式悬浮系统研究[J]. 铁道学报, 2005, 27(3): 50-54. |
| Wang Li, Xiong Jian, Zhang Kunlun, et al. Research of Hybrid Suspension System Made of Permanent-and Electromagnets[J]. Journal of the China Railway Society, 2005, 27(3): 50-54. | |
| 9 | 苏芷玄, 杨杰, 彭月, 等. 单点混合磁悬浮系统的自抗扰控制仿真研究[J]. 铁道科学与工程学报, 2022, 19(4): 864-873. |
| Su Zhixuan, Yang Jie, Peng Yue, et al. Simulating Active Disturbance-resistantcontrol of Single-point Hybrid Magnetic Suspension System[J]. Journal of Railway Science and Engineering, 2022, 19(4): 864-873. | |
| 10 | Levant Arie. Robust Exact Differentiation via Sliding Mode Technique[J]. Automatica, 1998, 34(3): 379-384. |
| 11 | 杨杰, 陈昱圻, 王盼盼. 基于改进粒子群算法的列车速度跟踪自抗扰控制器设计[J]. 铁道学报, 2021, 43(7): 40-46. |
| Yang Jie, Chen Yuqi, Wang Panpan. Design of Active Disturbance Rejection Controller for Train Speed Tracking Based on Improved Particle Swarm Optimization[J]. Journal of the China Railway Society, 2021, 43(7): 40-46. | |
| 12 | 耿亚, 吴访升. 基于粒子群-模拟退火算法的背包问题研究[J]. 控制工程, 2019, 26(5): 991-996. |
| Geng Ya, Wu Fangsheng. Research on Knapsack Problem Based on the Hybrid Algorithm of Particle Swarm Optimization and Simulated Annealing[J]. Control Engineering of China, 2019, 26(5): 991-996. | |
| 13 | 张文静, 曹博文, 李宽欣, 等. 中速磁悬浮列车的分数阶运行控制方法[J]. 铁道学报, 2022, 44(2): 42-48. |
| Zhang Wenjing, Cao Bowen, Li Kuanxin, et al. A Fractional Order Operation Control Method for Medium-speed Maglev Trains[J]. Journal of the China Railway Society, 2022, 44(2): 42-48. |
| [1] | Yu Xiangxing, Zhao Yandong, Zhang Baolin. Vibration Control of Offshore Wind Turbine Towers Based on Eddy Current Nonlinear Energy Sink [J]. Journal of System Simulation, 2025, 37(12): 3007-3017. |
| [2] | Fei Jiajie, Wu Dinghui, Fan Junyan, Wang Jing. Prediction of Converter Gas Generation Based on Intermission Production Improved Elman [J]. Journal of System Simulation, 2024, 36(5): 1179-1188. |
| [3] | Xu Yuanxing, Zhang Mengjian, Wang Deguang. Chaotic-encode Quantum PSO Algorithm for Flexible Job-shop Scheduling Problem [J]. Journal of System Simulation, 2024, 36(10): 2371-2382. |
| [4] | Zhang Hongli, Deng Jingshuang. Research on Artificial Population Generation and Application Based on Genetic Algorithm [J]. Journal of System Simulation, 2023, 35(9): 1965-1974. |
| [5] | Sun Yuzhen, Tang Yiwei, Li Shuai. Load System Modeling of Ultra-Supercritical Coal-Fired Power Unit Based on Improved Particle Swarm Optimization [J]. Journal of System Simulation, 2021, 33(4): 875-882. |
| [6] | Lu Jiabo, Cheng Peixing, Huang Yi, Yao Jinqiang, Yang Xuemeng, Ma Xinqiang, Liu Yong. An Intelligent Method for Rapid Construction of Time Sensitive Target Strike Chain [J]. Journal of System Simulation, 2021, 33(2): 346-357. |
| [7] | Li Changhua, Bi Chenggong, Li Zhijie. Crowd Evacuation Model Based on Improved PSO Algorithm [J]. Journal of System Simulation, 2020, 32(6): 1000-1008. |
| [8] | Qing Dongsheng, Zhang Xiaofang, Li Jianjun, Guo Rui, Deng Qiaoling. Spatial Structure Optimization of Natural Forest Based on Bee Colony-particle Swarm Algorithm [J]. Journal of System Simulation, 2020, 32(3): 371-381. |
| [9] | Shi Qinqin, Xu Qiang, Zhang Jianping. Improved DV-Hop Localization Scheme Based on the Best Path Matching Strategy [J]. Journal of System Simulation, 2019, 31(2): 316-324. |
| [10] | Liu Wei, Xu Jiaxuan, Wang Peipei, Liu Ruilong, Tang Jingkun. Train Energy Saving Operation Based on Simulated Annealing Algorithm [J]. Journal of System Simulation, 2018, 30(6): 2320-2327. |
| [11] | Wang Changtao, Sun Xiaotong, Han Zhonghua, Zhu Yi. A Study of Adaptive Simulated Annealing Particle Swarm Optimization (ASAPSO) Algorithm for Building Pipe Routing Design [J]. Journal of System Simulation, 2018, 30(5): 1941-1949. |
| [12] | Chen Chao, Wang Yan, Yan Dahu, Ji Zhicheng. Research on Dynamic Flexible Job Shop Scheduling Problem for Energy Consumption [J]. Journal of System Simulation, 2017, 29(9): 2168-2175. |
| [13] | Xu Shipeng, Wu Dinghui, Kong Fei, Ji Zhicheng. Solving Flexible Job-Shop Scheduling Problem by Improved Chicken Swarm Optimization Algorithm [J]. Journal of System Simulation, 2017, 29(7): 1497-1505. |
| [14] | Zhang Hongli, Li Ruiguo, Fan Wenhui. Bernstein Neural Network Chaotic Sequence Prediction Based on Phase Space Reconstruction [J]. Journal of System Simulation, 2016, 28(4): 880-889. |
| [15] | Yu Yunjun, Liu Tao, Wang Shisheng, Xin Jianbo, Nie Xiaohua. Global optimized Photovoltaic MPPT Algorithm Based on PSO and Incremental Conductance Method [J]. Journal of System Simulation, 2016, 28(12): 2994-3000. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
