

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (6): 1260-1277.doi: 10.16182/j.issn1004731x.joss.22-0132
• Papers • Previous Articles Next Articles
Tengfei Zhang1( ), Rong Hu1(), Bin Qian1,2, Lü Yang1
), Rong Hu1(), Bin Qian1,2, Lü Yang1
Received:2022-02-24
Revised:2022-05-23
Online:2023-06-29
Published:2023-06-20
Contact:
Rong Hu
E-mail:869959588@qq.com;ronghu@vip.163.com
CLC Number:
Tengfei Zhang, Rong Hu, Bin Qian, Lü Yang. Learning Variable Neighborhood Search Algorithm for Transportation-assembly Collaborative Optimization Problem[J]. Journal of System Simulation, 2023, 35(6): 1260-1277.
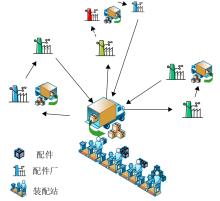
Fig. 1
TACOP model
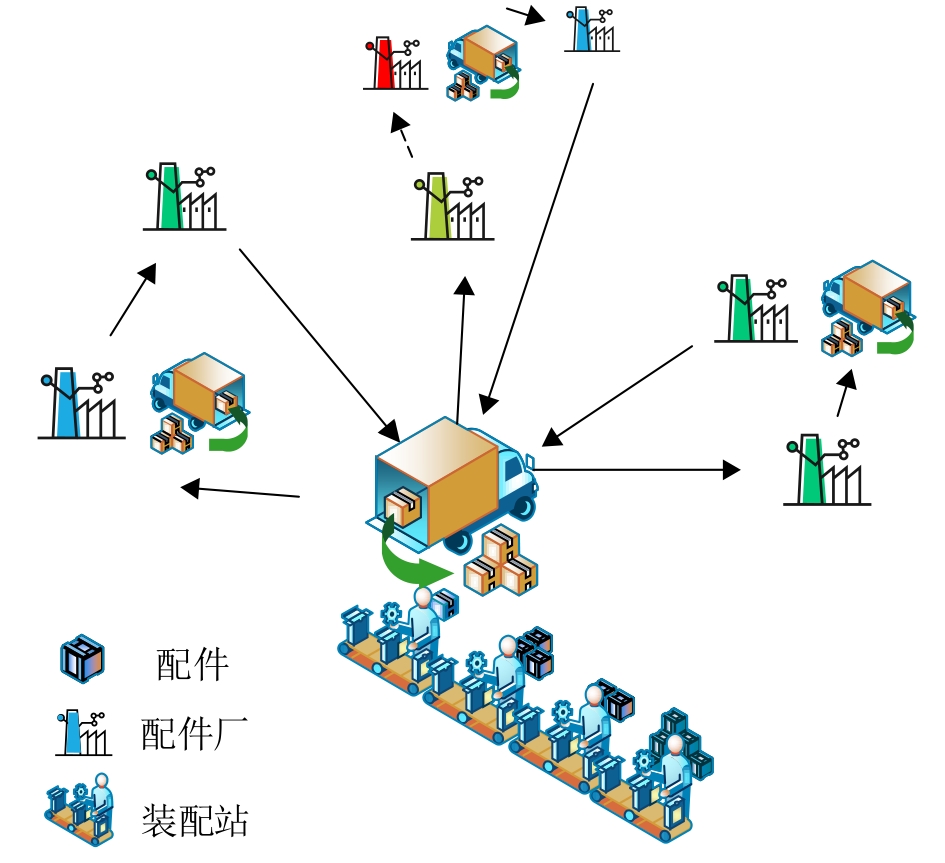

Fig. 2
Solution example for small scale TACOP
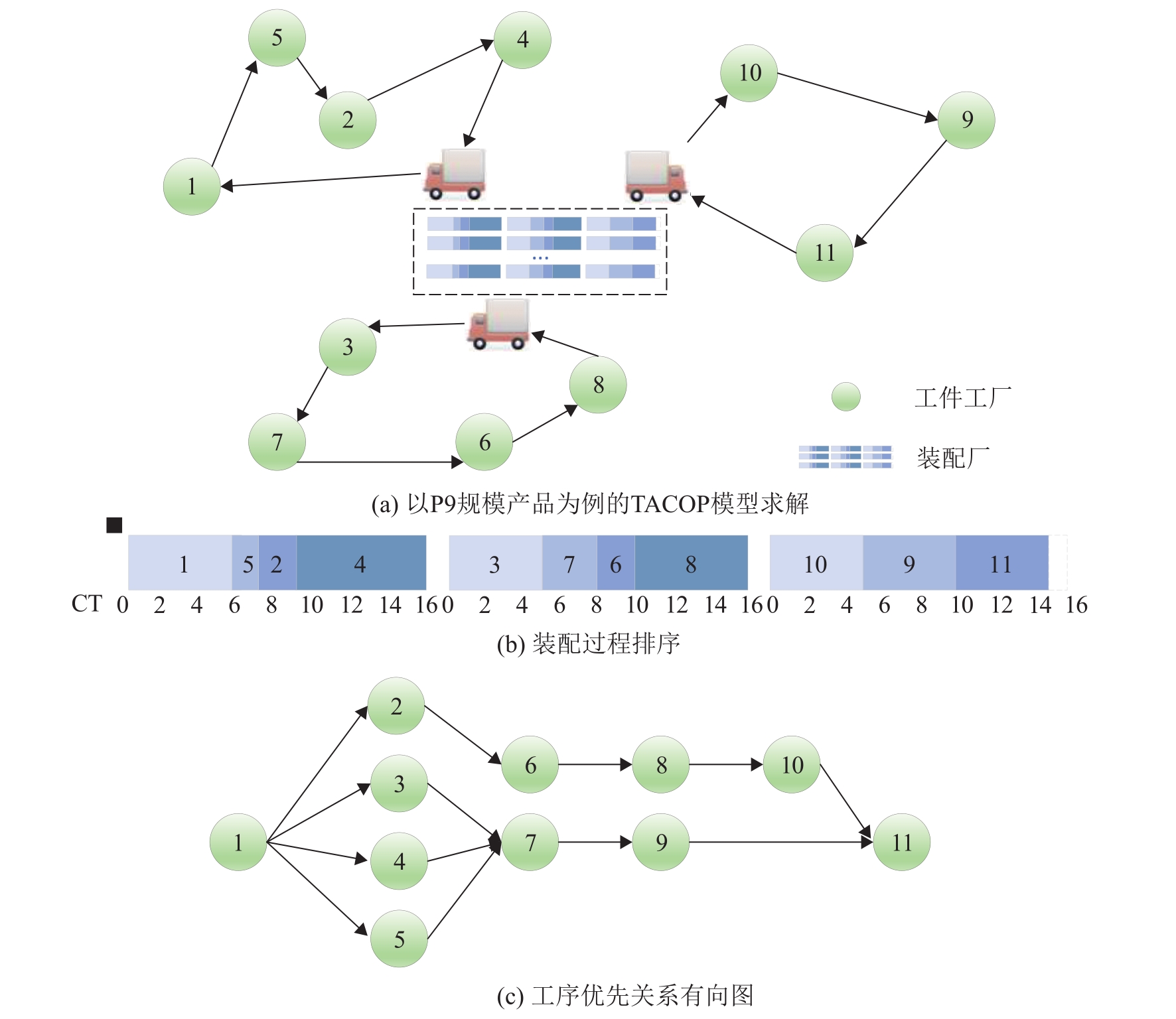

Fig. 3
TACOP solving process under ADS decomposition strategy
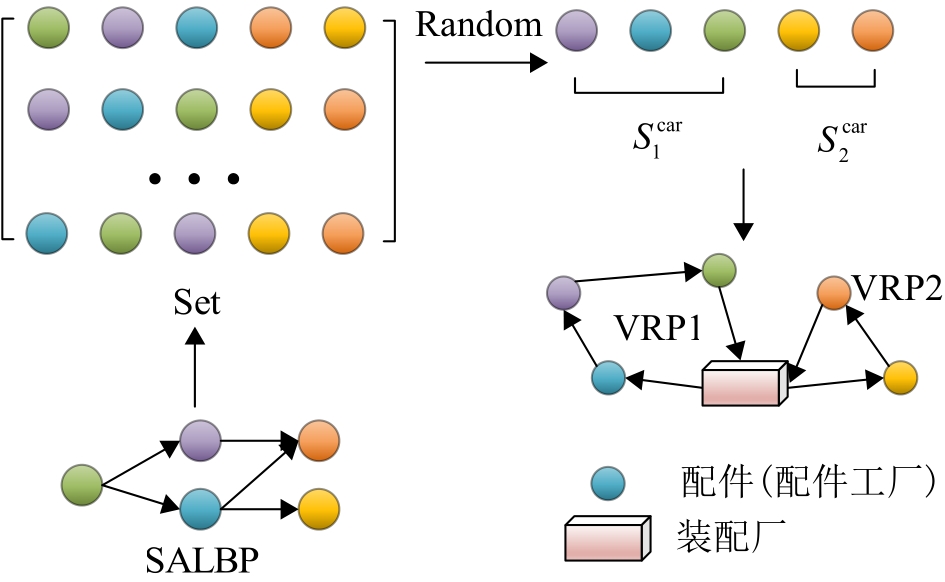
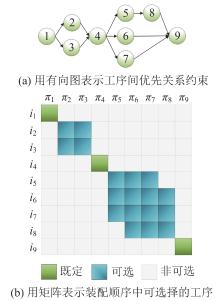
Fig. 4
Assembly constrained directed graph and process matrix(P9)
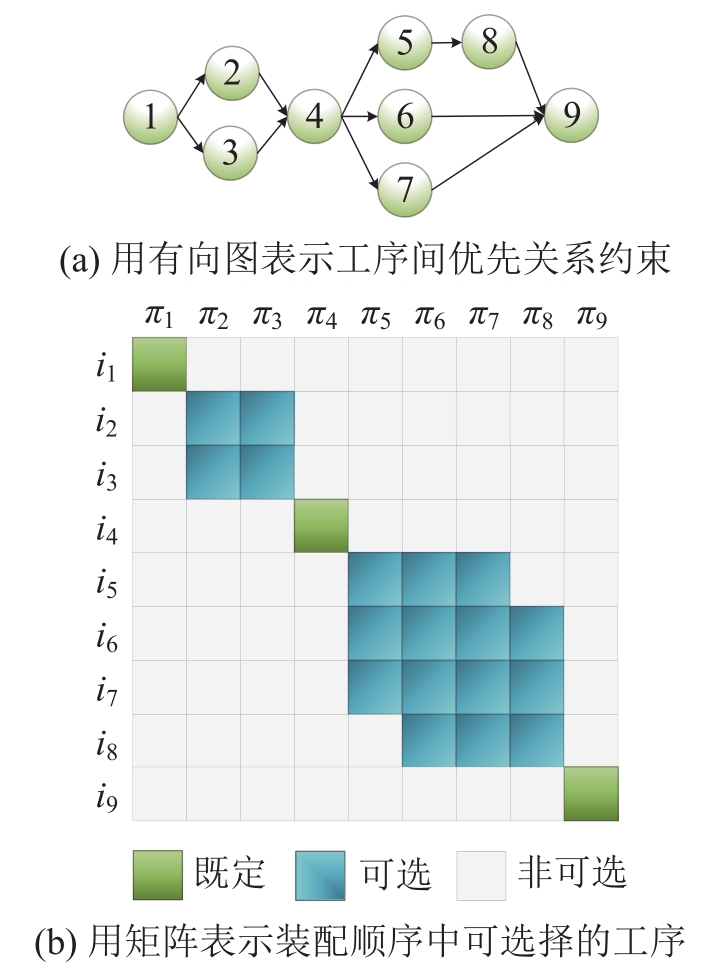
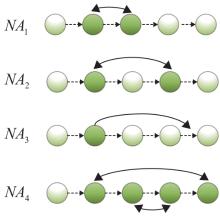
Fig. 5
Neighborhood action diagram
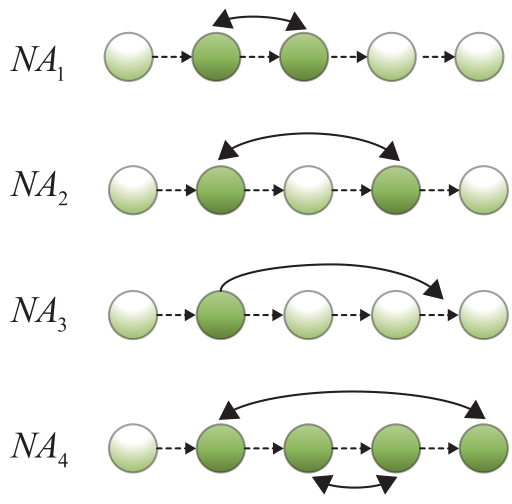
Table 1
Neighborhood actions and related symbols
| 参数 | 相邻逆序 | 交换 | 插入 | 局部逆序 |
|---|---|---|---|---|
| 编号 | ||||
| 概率值 |
Table 2
Number of workstations for different product assembly lines
| 装配算例 | 工作站数目 |
|---|---|
| JAESCHKE | 4 |
| JACKSON | 5 |
| BUXEY | 6 |
| KILBRID | 8 |
| LUTZ1 | 10 |
| LUTZ2 | 40 |
Table 3
Parameter level setting
| 参数 | 水平 | ||
|---|---|---|---|
| 0.1 | 0.3 | 0.5 | |
| 0.2 | 0.4 | 0.6 | |
Table 4
Parameter setting and response value
| 组别 | 响应值 | ||
|---|---|---|---|
| 1 | 1 | 1 | 0.013 |
| 2 | 1 | 2 | 0.015 |
| 3 | 1 | 3 | 0.026 |
| 4 | 2 | 1 | 0.023 |
| 5 | 2 | 2 | 0.014 |
| 6 | 2 | 3 | 0.014 |
| 7 | 3 | 1 | 0.030 |
| 8 | 3 | 2 | 0.020 |
| 9 | 3 | 3 | 0.019 |
Table 5
Parameter level and response value
| 水平 | ||
|---|---|---|
| 影响等级 | 1 | 2 |
| 1 | 0.018 | 0.022 |
| 2 | 0.017 | 0.016 |
| 3 | 0.023 | 0.020 |
| 极差 | 0.006 | 0.005 |
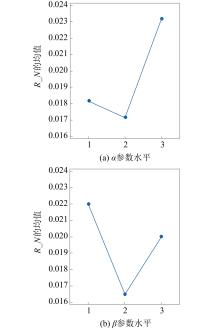
Fig. 6
Parameter setting response curve
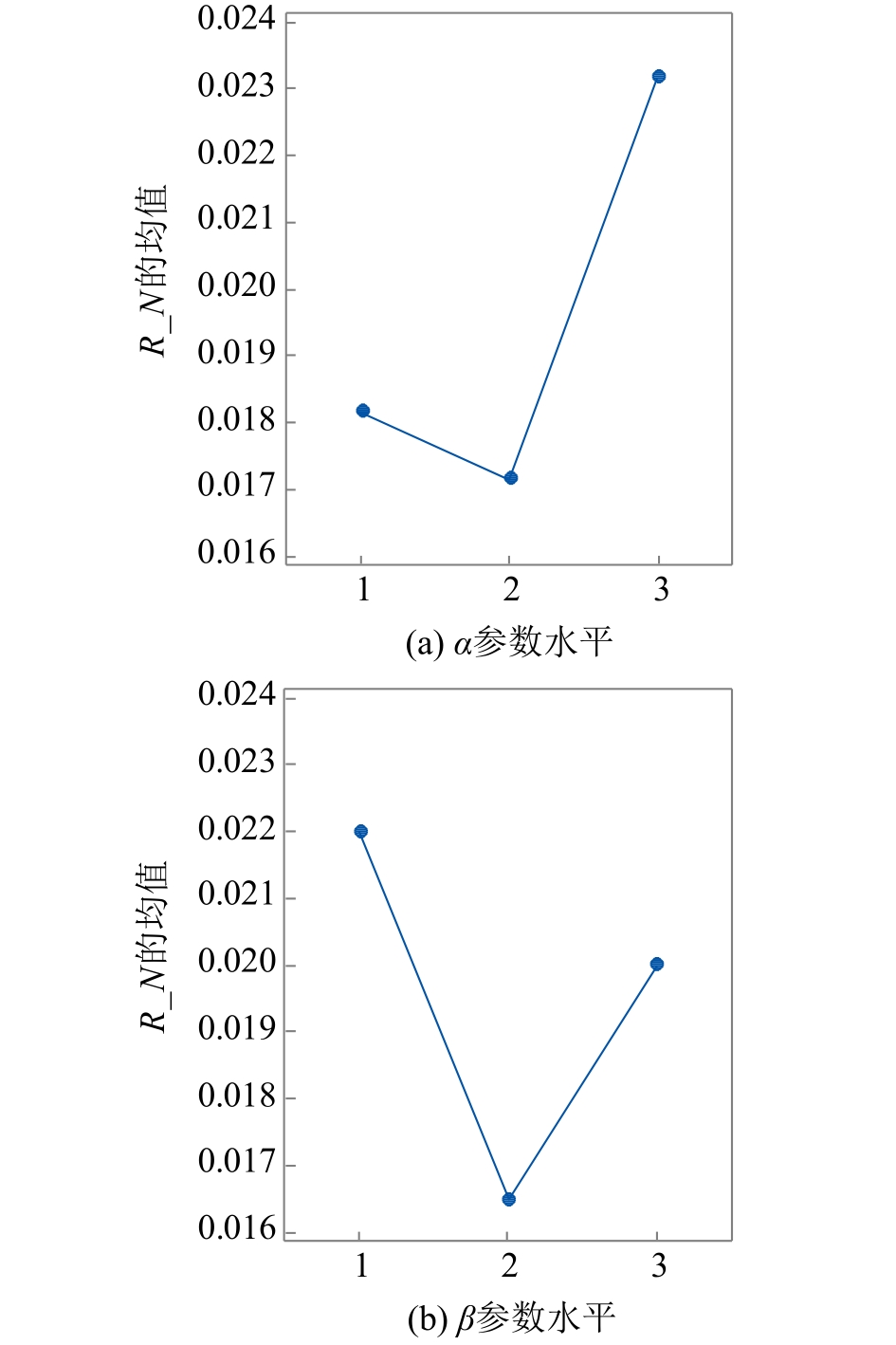
Table 6
Comparison results of LVNS_TO、LVNS _GS and LVNS_DS
| 算例 | LVNS_TO | LVNS_GS | LVNS_DS | |||
|---|---|---|---|---|---|---|
| NB | 0 | 0 | 1 | 1 | 5 | 5 |
| JACKSON | 2.36 | 0.13 | 0.36 | 0.02 | ||
| JAESCHKE | 0.00 | 0.00 | 1.36 | 0.04 | ||
| BUXEY | 1.00 | 0.06 | 1.00 | 0.04 | ||
| KILBRID | 0.00 | 0.00 | 10.00 | 0.25 | ||
| LUTZ 1 | 0.50 | 0.02 | 2.20 | 0.09 | ||
| LUTZ2 | 0.45 | 0.02 | 11.09 | 0.21 | ||
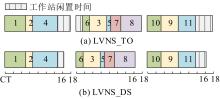
Fig. 7
Schematic diagram of calculation results of assembly solution under two decomposition strategies(P9)
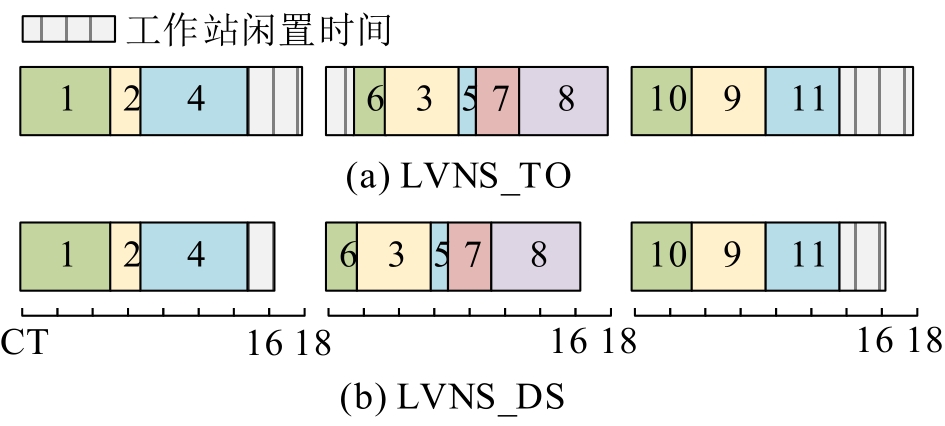
Table 7
Comparison results of LVNS_DS、VNS、NSGA-Ⅱ and MOEA/D
| 算例 | VNS | NSGA-Ⅱ | MOEA/D | LVNS_DS | ||||
|---|---|---|---|---|---|---|---|---|
| NB | 1 | 1 | 0 | 0 | 0 | 0 | ||
| BUXEY | 1.70 | 0.06 | 1.00 | 0.04 | 1.75 | 0.07 | ||
| JACKSON | 1.65 | 0.03 | 2.25 | 0.05 | 4.75 | 0.09 | ||
| JAESCHKE | 6.30 | 0.14 | 5.40 | 0.10 | 2.80 | 0.05 | ||
| KILBRID | 6.65 | 0.12 | 2.10 | 0.03 | 3.05 | 0.04 | ||
| LUTZ1 | 14.75 | 0.13 | 6.00 | 0.05 | 10.10 | 0.08 | ||
| LUTZ2 | 1.70 | 0.06 | 1.00 | 0.04 | 1.75 | 0.07 | ||
| 1 | 徐颖, 刘勤明, 周林森. 基于博弈论的闭环双渠道回收供应链决策研究[J]. 系统仿真学报, 2022, 34(2): 396-408. |
| Xu Ying, Liu Qinming, Zhou Linsen. Research on Decision-making of Closed-loop Supply Chain for Dual-channel Recovery Based on Game Theory[J]. Journal of System Simulation, 2022, 34(2): 396-408. | |
| 2 | 王玉. "物流+制造"共探新时代融合发展路径[J]. 物流技术与应用, 2021, 26(5): 100-103. |
| Wang Yu. The Integrated Development Path of Logistics Plus Manufacturing in the New Era[J]. Logistics & Material Handling, 2021, 26(5): 100-103. | |
| 3 | 张明超, 孙新波, 王永霞. 数据赋能驱动精益生产创新内在机理的案例研究[J]. 南开管理评论, 2021, 24(3): 102-114. |
| Zhang Mingchao, Sun Xinbo, Wang Yongxia. A Case Study on the Internal Mechanism of Data Enablement Driving Lean Production Innovation[J]. Nankai Business Review, 2021, 24(3): 102-114. | |
| 4 | Zhou Binghai, He Zhaoxu. A Static Semi-kitting Strategy System of JIT Material Distribution Scheduling for Mixed-flow Assembly Lines[J]. Expert Systems with Applications, 2021, 184: 115523. |
| 5 | Emde S, Boysen N. Optimally Routing and Scheduling Tow Trains for JIT-supply of Mixed-model Assembly Lines[J]. European Journal of Operational Research, 2012, 217(2): 287-299. |
| 6 | 胡蓉, 陈文博, 钱斌, 等. 学习型蚁群算法求解绿色多车场车辆路径问题[J]. 系统仿真学报, 2021, 33(9): 2095-2108. |
| Hu Rong, Chen Wenbo, Qian Bin, et al. Learning Ant Colony Algorithm for Green Multi-depot Vehicle Routing Problem[J]. Journal of System Simulation, 2021, 33(9): 2095-2108. | |
| 7 | Miranda D M, Conceição S V. The Vehicle Routing Problem with Hard Time Windows and Stochastic Travel and Service Time[J]. Expert Systems with Applications, 2016, 64: 104-116. |
| 8 | Zhang Defu, Cai Sifan, Ye Furong, et al. A Hybrid Algorithm for a Vehicle Routing Problem with Realistic Constraints[J]. Information Sciences, 2017, 394-395: 167-182. |
| 9 | Koulamas C, Kyparisis G J. The No-wait Flow Shop with Rejection[J]. International Journal of Production Research, 2021, 59(6): 1852-1859. |
| 10 | Driscoll J, Thilakawardana D. The Definition of Assembly Line Balancing Difficulty and Evaluation of Balance Solution Quality[J]. Robotics and Computer-Integrated Manufacturing, 2001, 17(1/2): 81-86. |
| 11 | Becker C, Scholl A. A Survey on Problems and Methods in Generalized Assembly Line Balancing[J]. European Journal of Operational Research, 2006, 168(3): 694-715. |
| 12 | 邓超, 钱斌, 胡蓉, 等. 融合规则的HEDA求解带工件批量运输的三阶段装配集成调度问题[J]. 控制与决策, 2020, 35(10): 2507-2513. |
| Deng Chao, Qian Bin, Hu Rong, et al. Rule-based Hybrid EDA for Three-stage Assembly Integrated Scheduling Problem with Job Batches Transportation[J]. Control and Decision, 2020, 35(10): 2507-2513. | |
| 13 | 周炳海, 彭涛. 混流装配生产线准时化物料补给调度方法[J]. 控制与决策, 2017, 32(6): 976-982. |
| Zhou Binghai, Peng Tao. Scheduling Methods of Just-in-time Material Replenishment in Mixed-model Assembly Lines[J]. Control and Decision, 2017, 32(6): 976-982. | |
| 14 | Fathi M, Rodríguez V, Fontes D B M M, et al. A Modified Particle Swarm Optimisation Algorithm to Solve the Part Feeding Problem at Assembly Lines[J]. International Journal of Production Research, 2016, 54(3): 878-893. |
| 15 | Golz J, Gujjula R, Günther H O, et al. Part Feeding at High-variant Mixed-model Assembly Lines[J]. Flexible Services and Manufacturing Journal, 2012, 24(2): 119-141. |
| 16 | Rahman H F, Janardhanan M N, Nielsen P. An Integrated Approach for Line Balancing and AGV Scheduling Towards Smart Assembly Systems[J]. Assembly Automation, 2020, 40(2): 219-234. |
| 17 | Mladenović N, Hansen P. Variable Neighborhood Search[J]. Computers & Operations Research, 1997, 24(11): 1097-1100. |
| 18 | 严洪森, 万晓琴, 熊福力. 基于VNS-EM混合算法的两阶段装配流水车间调度[J]. 东南大学学报(自然科学版), 2014, 44(6): 1285-1289. |
| Yan Hongsen, Wan Xiaoqin, Xiong Fuli. Two-stage Assembly Flow Shop Scheduling Based on Hybrid VNS-EM Algorithm[J]. Journal of Southeast University(Natural Science Edition), 2014, 44(6): 1285-1289. | |
| 19 | 南丽君, 陈彦如, 张宗成. 改进的自适应大规模邻域搜索算法求解动态需求的混合车辆路径问题[J]. 计算机应用研究, 2021, 38(10): 2926-2934. |
| Lijun Nan, Chen Yanru, Zhang Zongcheng. Improved Adaptive Large Neighborhood Search Algorithm for Mixed Fleet Routing Problem of Dynamic Demands[J]. Application Research of Computers, 2021, 38(10): 2926-2934. | |
| 20 | Hansen P, Mladenović N. Variable Neighborhood Search: Principles and Applications[J]. European Journal of Operational Research, 2001, 130(3): 449-467. |
| 21 | Prajapati A, Chhabra J K. Information-theoretic Remodularization of Object-oriented Software Systems[J]. Information Systems Frontiers, 2020, 22(4): 863-880. |
| 22 | Tang Qiuhua, Li Zixiang, Zhang Liping. An Effective Discrete Artificial Bee Colony Algorithm with Idle Time Reduction Techniques for Two-sided Assembly Line Balancing Problem of Type-II[J]. Computers & Industrial Engineering, 2016, 97: 146-156. |
| 23 | Ishibuchi H, Yoshida T, Murata T. Balance between Genetic Search and Local Search in Memetic Algorithms for Multiobjective Permutation Flowshop Scheduling[J]. IEEE Transactions on Evolutionary Computation, 2003, 7(2): 204-223. |
| 24 | 郑逸凡, 钱斌, 胡蓉, 等. CE-GA协同进化算法求解人机共同作业的U形装配线平衡问题[J]. 机械工程学报, 2020, 56(9): 199-214. |
| Zheng Yifan, Qian Bin, Hu Rong, et al. CE-GA Co-evolutionary Algorithm for Solving U-shaped Assembly Line Balancing Problem with Man-robot Cooperation[J]. Journal of Mechanical Engineering, 2020, 56(9): 199-214. | |
| 25 | Deb K, Pratap A, Agarwal S, et al. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. |
| 26 | Zhang Qingfu, Li Hui. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition[J]. IEEE Transactions on Evolutionary Computation, 2007, 11(6): 712-731. |
| [1] | Zhang Wei, Sheng Wei, Cao Yidan, Zhao Tingsheng. Research on 3D Visualization of Safety Monitoring and Early Warning for Steel Continuous Casting Scenarios [J]. Journal of System Simulation, 2025, 37(8): 1991-2003. |
| [2] | Zhang Shuzhen, Cheng Yukun, Liu Yangbo, Zha Fusheng. An Extended Image Features Based Uncalibrated Visual Servoing Method [J]. Journal of System Simulation, 2025, 37(5): 1210-1221. |
| [3] | Chen Xue, Cao Jianwen. CAE Simulation Optimization Method Based on Dynamic Coupling Model [J]. Journal of System Simulation, 2025, 37(3): 718-731. |
| [4] | Jiang Yuyan, Ma Ning, Li Yan, Gan Rumeijiang, Wang Fuyu. Collaborative Optimization Problem of Dynamic Pre-maintenance and Green Scheduling [J]. Journal of System Simulation, 2025, 37(2): 362-378. |
| [5] | Ren Liang, Zhou Zerong, Ma Yunfeng. Optimization of Order Picking and Sorting Coordintion in “Goods-to-person” System [J]. Journal of System Simulation, 2025, 37(12): 3128-3139. |
| [6] | Ji Peng, Zhao Jinpeng, Jiang Limin. Design and Function Analysis of New Steering System for Autonomous Vehicle [J]. Journal of System Simulation, 2025, 37(1): 211-219. |
| [7] | Xiao Peng, Xie Feng, Ni Haihong, Zhang Min, Tang Zhili, Li Ni. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning [J]. Journal of System Simulation, 2024, 36(5): 1141-1151. |
| [8] | Yu Yang, Xia Yuxing, Lu Wentao, Liu Mai, Gao Shixuan, Chen Dongyang. Two-level Optimal Dispatch of Power System Based on Load-storage Carbon Flow Model [J]. Journal of System Simulation, 2024, 36(10): 2288-2299. |
| [9] | Xu Yigang, Chen Yong, Wang Chen, Peng Yunxian. Improving NSGA-III Algorithm for Solving High-dimensional Many-objective Green Flexible Job Shop Scheduling Problem [J]. Journal of System Simulation, 2024, 36(10): 2314-2329. |
| [10] | Bao Zhe, Zhang Xiaofang, Li Wei, Xu Ye, Wang Xu. Research on Flexible Operational Optimization of CCHP System Based on Intelligent Fusion Algorithm [J]. Journal of System Simulation, 2024, 36(10): 2330-2344. |
| [11] | Yin Yanchao, Feng Jiasheng, Yi Bin, Li Wang, Yin Qingwen. Visual Monitoring System of Digital Twin Workshop for Process Manufacturing [J]. Journal of System Simulation, 2024, 36(1): 120-130. |
| [12] | Jiaying Yu, Hongli Zhang, Yingchao Dong. Research on No-Wait Flow Shop Scheduling Based on Discrete State Transition Algorithm [J]. Journal of System Simulation, 2023, 35(5): 1034-1045. |
| [13] | Dong Zhiming, Si Bingshan, Li Liang. Requirements of Parallel Combat System Based on GQFD-Coupling Coordination Degree [J]. Journal of System Simulation, 2023, 35(11): 2454-2463. |
| [14] | Zhijun Song, Zongyu Chen, Lü jing, Tianshu Wang. Rigid-liquid Coupling Simulation of Liquid-filled Spacecraft Based on OpenFOAM [J]. Journal of System Simulation, 2022, 34(8): 1789-1798. |
| [15] | Zheng Yang, Zhimin Xiang, Shiwen Ma. A Method of Loose Coupling Entity Modeling Based on Variable Rules [J]. Journal of System Simulation, 2022, 34(7): 1506-1511. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
