

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (5): 1059-1074.doi: 10.16182/j.issn1004731x.joss.22-0069
• Papers • Previous Articles Next Articles
Huicheng Luo( ), Shujuan Wang()
), Shujuan Wang()
Received:2022-01-22
Revised:2022-03-21
Online:2023-05-30
Published:2023-05-22
Contact:
Shujuan Wang
E-mail:2873108580@qq.com;477963374@qq.com
CLC Number:
Huicheng Luo, Shujuan Wang. Multi-camera Vehicle Recognition Method Based on Feature Robustness Enhancement[J]. Journal of System Simulation, 2023, 35(5): 1059-1074.
Fig. 1
Overall framework
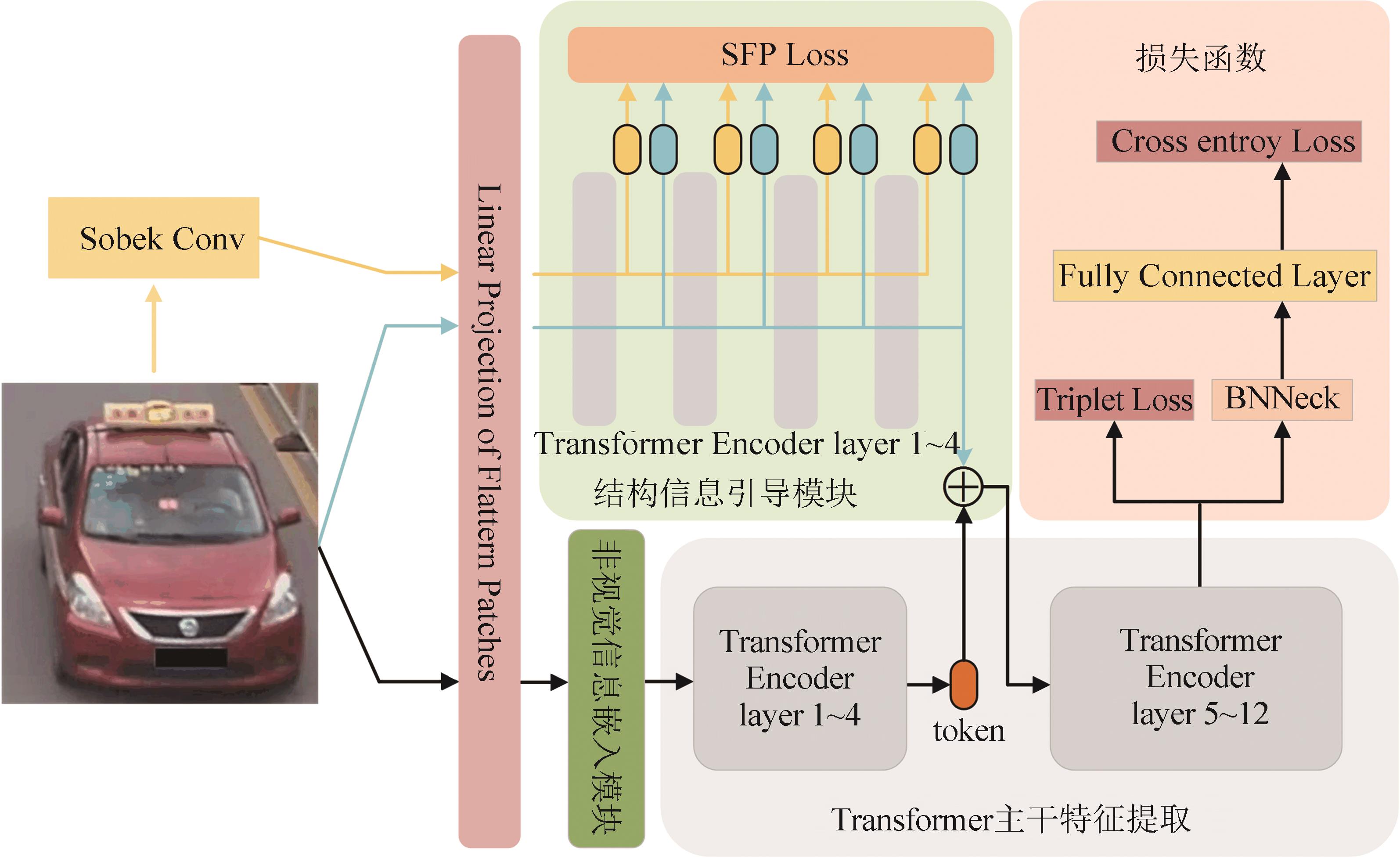
Fig. 2
Sobel convolution module
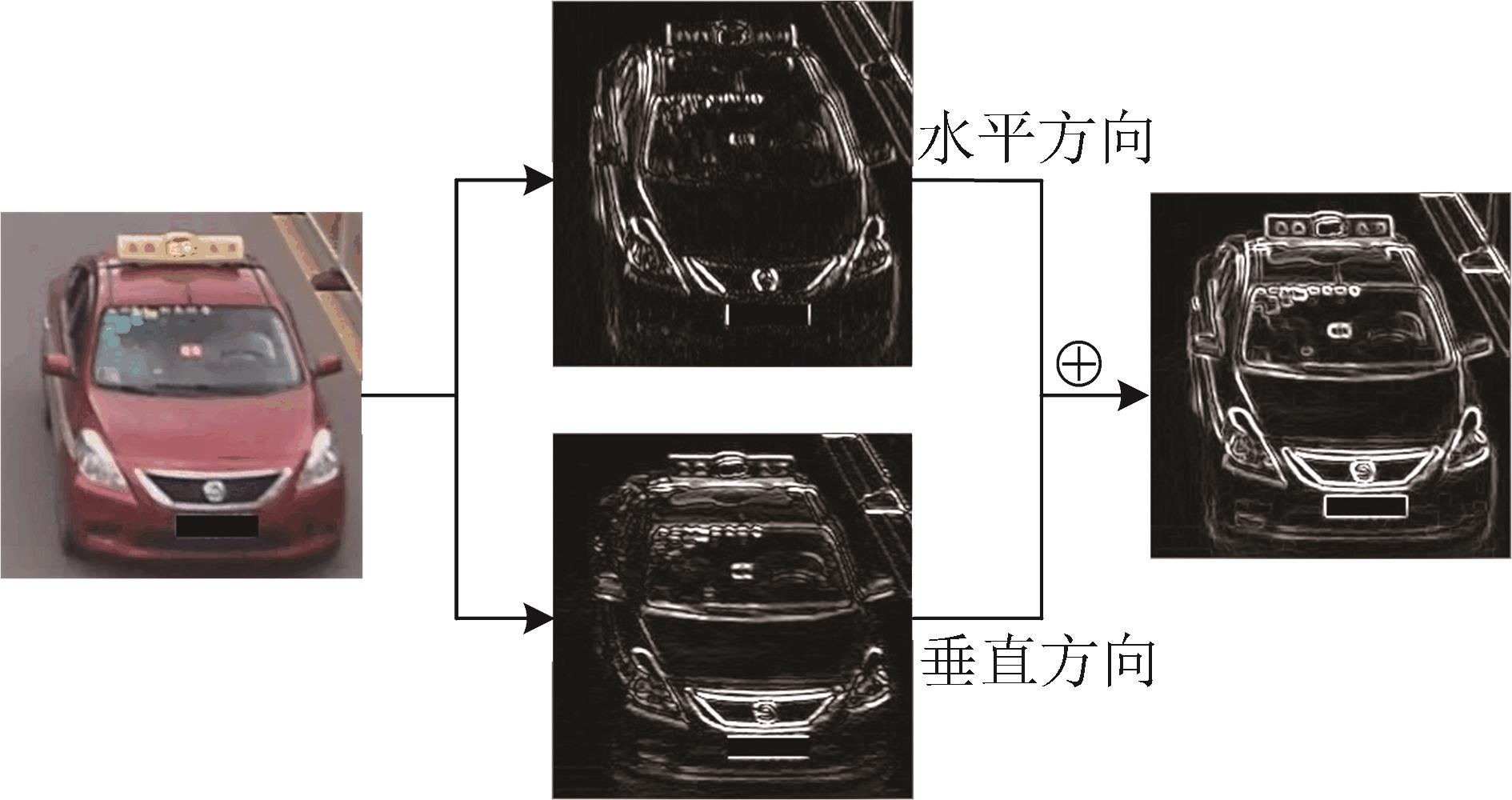
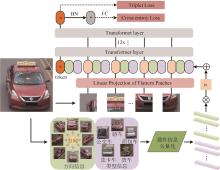
Fig. 3
Diagram of non-visual information embedded in backbone network
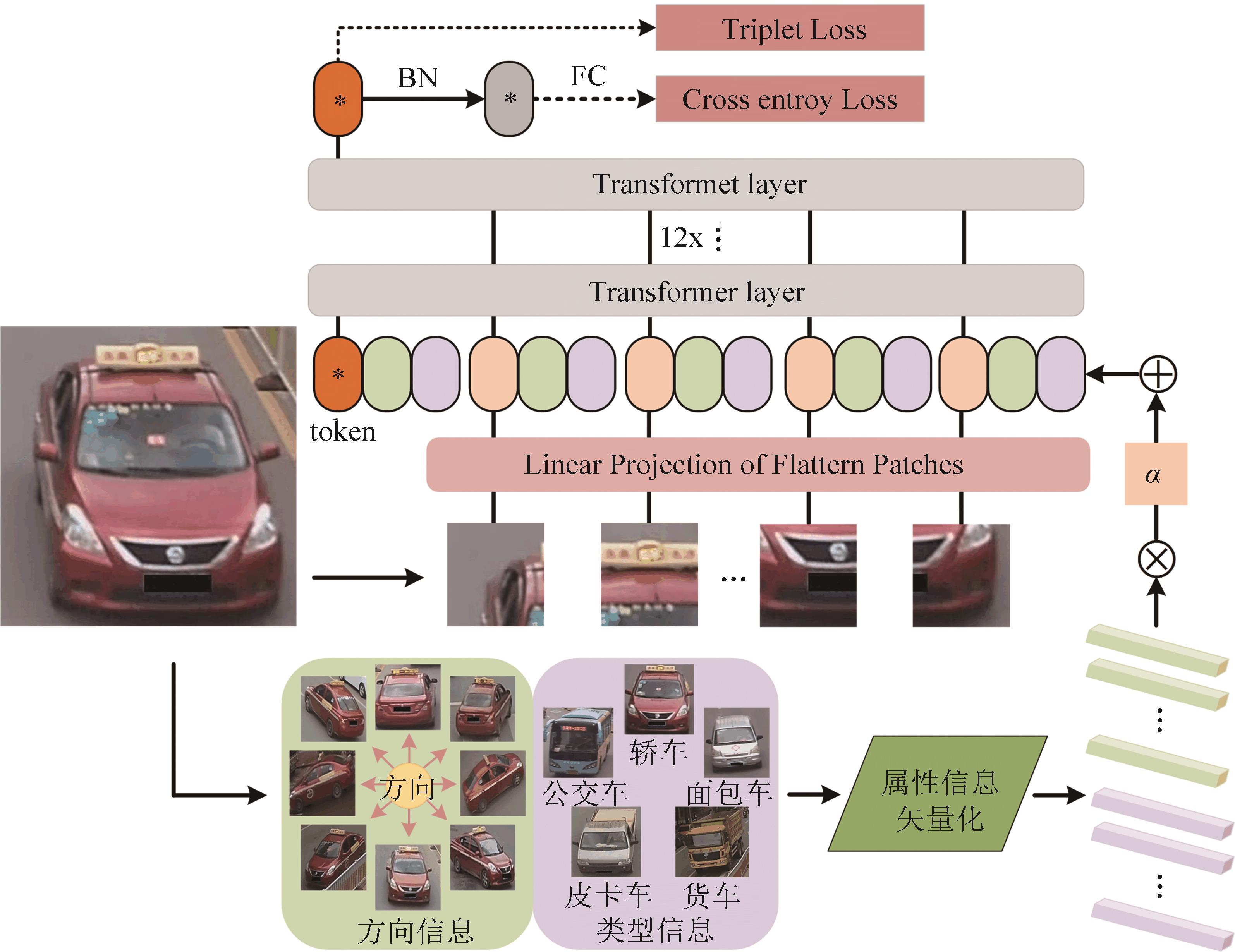
Table 1
Experimental comparison on VeRi-776 dataset
| 方法 | rank-1 | rank-5 | mAP |
|---|---|---|---|
| PROVID | 81.56 | 95.11 | 53.42 |
| SDC-CNN | 83.49 | 92.55 | 53.45 |
| VAMI+STR | 85.92 | 91.84 | 61.32 |
| DQAL | 88.50 | 94.41 | 60.01 |
| QD-LDF | 88.50 | 94.46 | 61.83 |
| AAVER | 88.97 | 94.70 | 61.18 |
| SGAT | 89.69 | - | 65.66 |
| VANet | 89.78 | 95.99 | 66.34 |
| DMML | 91.20 | 96.30 | 70.10 |
| MSV | 91.24 | - | 65.13 |
| MRM | 91.77 | 95.82 | 68.55 |
| PAMTRI | 92.86 | 96.97 | 71.88 |
| SAN | 93.30 | 97.10 | 72.50 |
| Part Regular | 94.30 | 98.70 | 74.30 |
| SFF+SAtt+TBR | 94.93 | 97.85 | 74.11 |
| CFVMNet | 95.30 | 98.40 | 77.06 |
| App+Lic | 95.41 | 97.38 | 78.08 |
| PVEN | 95.60 | 98.40 | 79.50 |
| VOC-ReID | 96.30 | - | 79.70 |
| SAVER | 96.40 | 98.60 | 79.60 |
| Ours | 96.78 | 98.39 | 80.56 |

Fig. 4
Some visualization results of vehicle recognition on VeRi-776 dataset
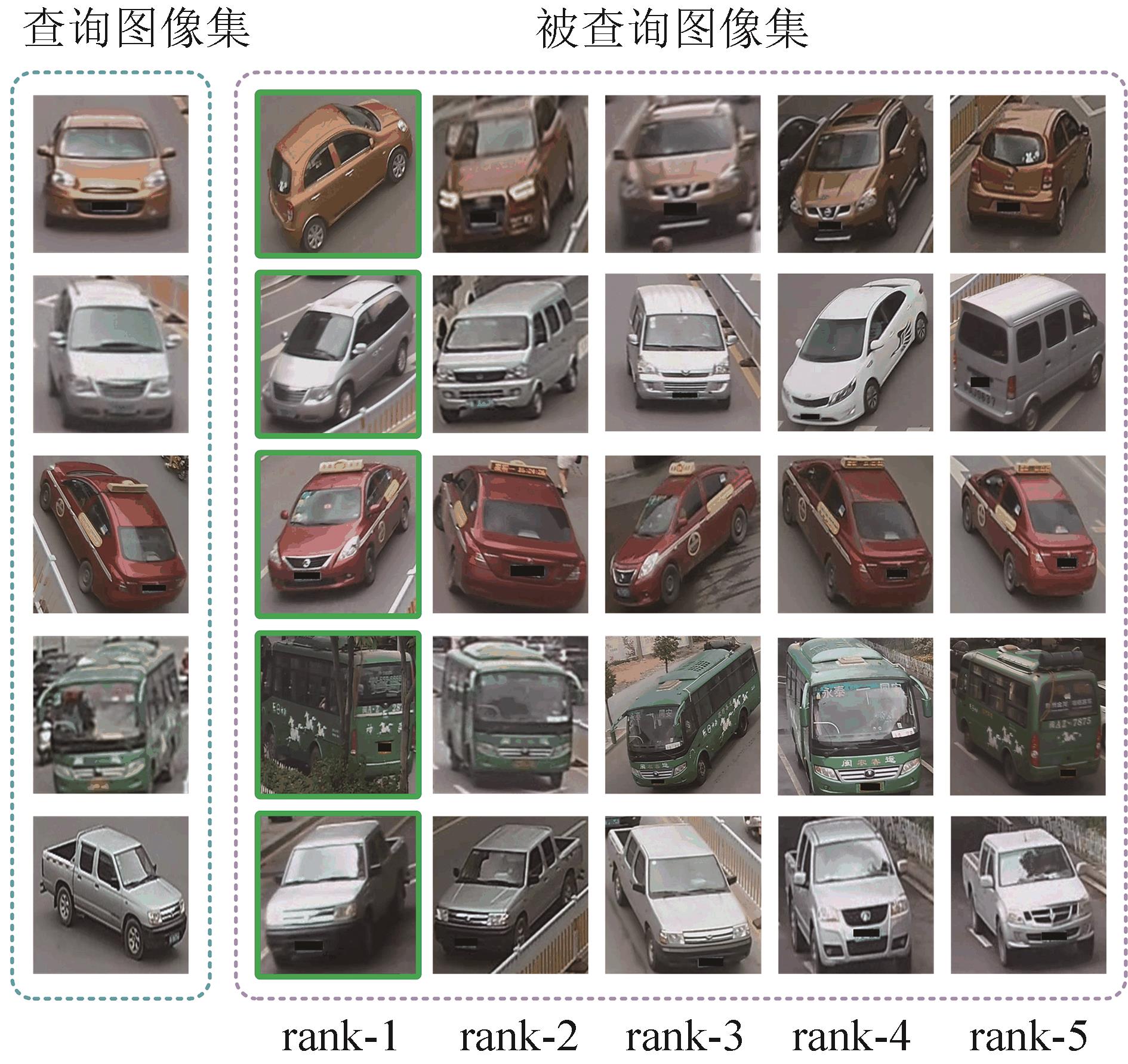
Table 2
Experimental comparison on VehicleID dataset %
| 方法 | Test-800 | Test-1600 | Test-2400 | |||
|---|---|---|---|---|---|---|
| rank-1 | mAP | rank-1 | mAP | rank-1 | mAP | |
| SDC-CNN | 56.98 | 63.52 | 50.57 | 80.05 | 42.92 | 49.68 |
| VAMI | 63.12 | - | 52.87 | 75.12 | 47.34 | - |
| SFF+SAtt | 64.50 | - | 59.12 | 79.85 | 54.41 | - |
| TAMR | 66.02 | 67.64 | 62.90 | - | 59.69 | 60.97 |
| QD-DLF | 72.32 | 76.54 | 70.66 | 88.90 | 64.14 | 68.41 |
| AAVER | 74.69 | - | 68.62 | 89.95 | 63.54 | - |
| DQAL | 74.74 | - | 71.01 | 86.56 | 68.23 | - |
| MSV | 75.10 | 79.30 | 71.80 | 86.1 | 68.70 | 73.30 |
| EALN | 75.11 | 77.50 | 71.78 | 74.20 | 69.30 | 71.00 |
| MRM | 76.64 | 80.02 | 74.20 | 77.32 | 70.86 | 74.02 |
| SGAT | 78.12 | 81.49 | 73.98 | 77.46 | 71.87 | 75.35 |
| SAN | 79.70 | - | 78.40 | - | 75.60 | - |
| SAVER | 79.90 | - | 77.60 | - | 75.30 | - |
| App+Lic | 79.50 | 82.70 | 76.90 | 79.90 | 74.80 | 77.70 |
| CFVMNet | 81.40 | - | 77.30 | - | 74.70 | - |
| Ours | 84.03 | 89.32 | 78.99 | 85.39 | 76.61 | 83.08 |
Table 3
Ablation experiment
| 消融方式 | rank-1 | rank-5 | mAP |
|---|---|---|---|
| Baseline | 92.73 | 97.08 | 69.86 |
| Baseline+SIGM | 95.95 | 98.09 | 78.57 |
| Baseline+NIEM(only type) | 95.11 | 97.85 | 75.73 |
| Baseline+NIEM(only direction) | 95.36 | 97.91 | 76.82 |
| Baseline+NIEM | 95.89 | 98.03 | 77.84 |
| Baseline+SIGM+NIEM | 96.78 | 98.39 | 80.56 |

Fig. 5
Some example results of extracting image contour information on VeRi-776 dataset
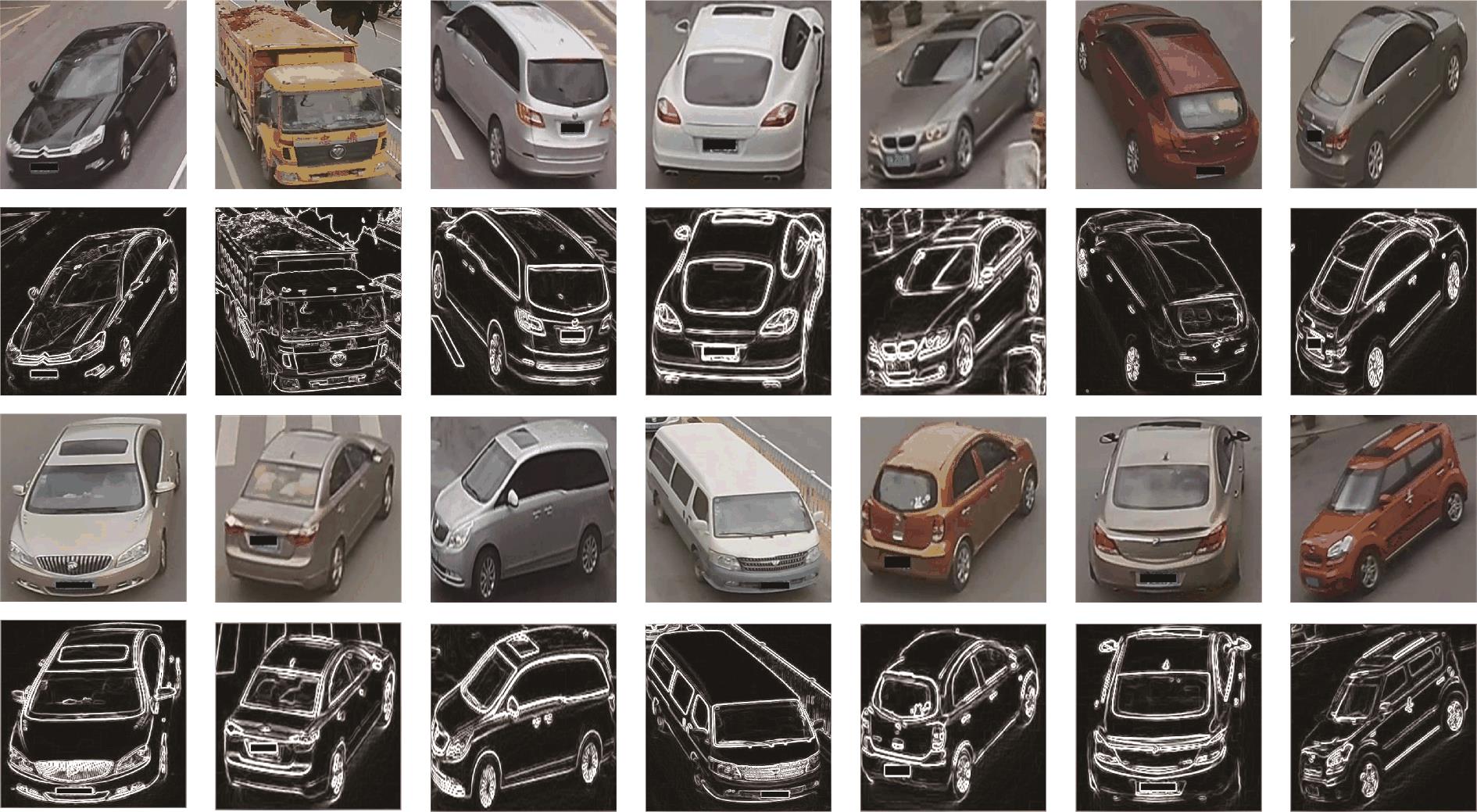
Fig. 6
Effect analysis of hyperparameterβ
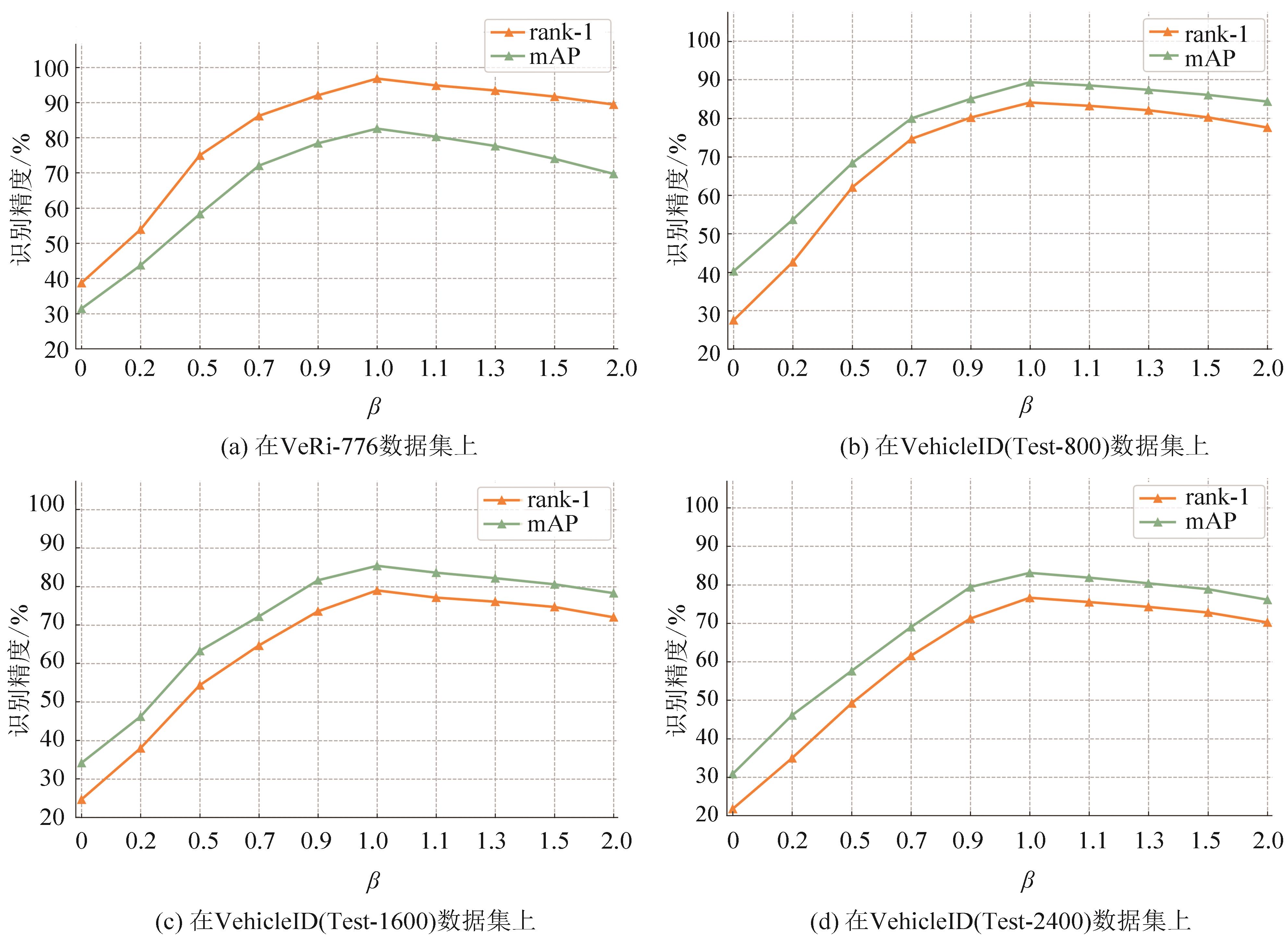
Fig. 7
Effect analysis of hyperparameterφ
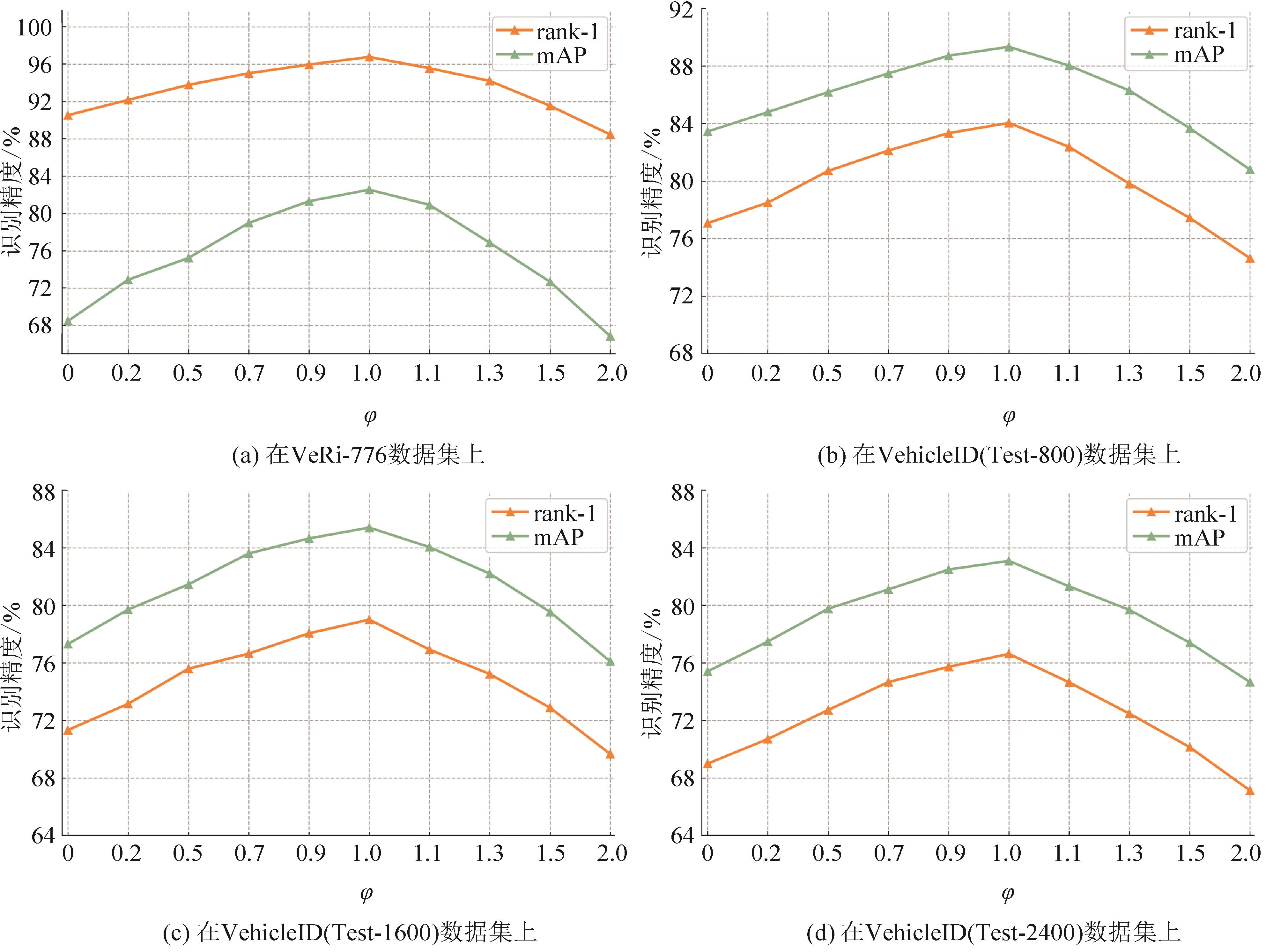
Fig. 8
Effect analysis of hyperparameterλ
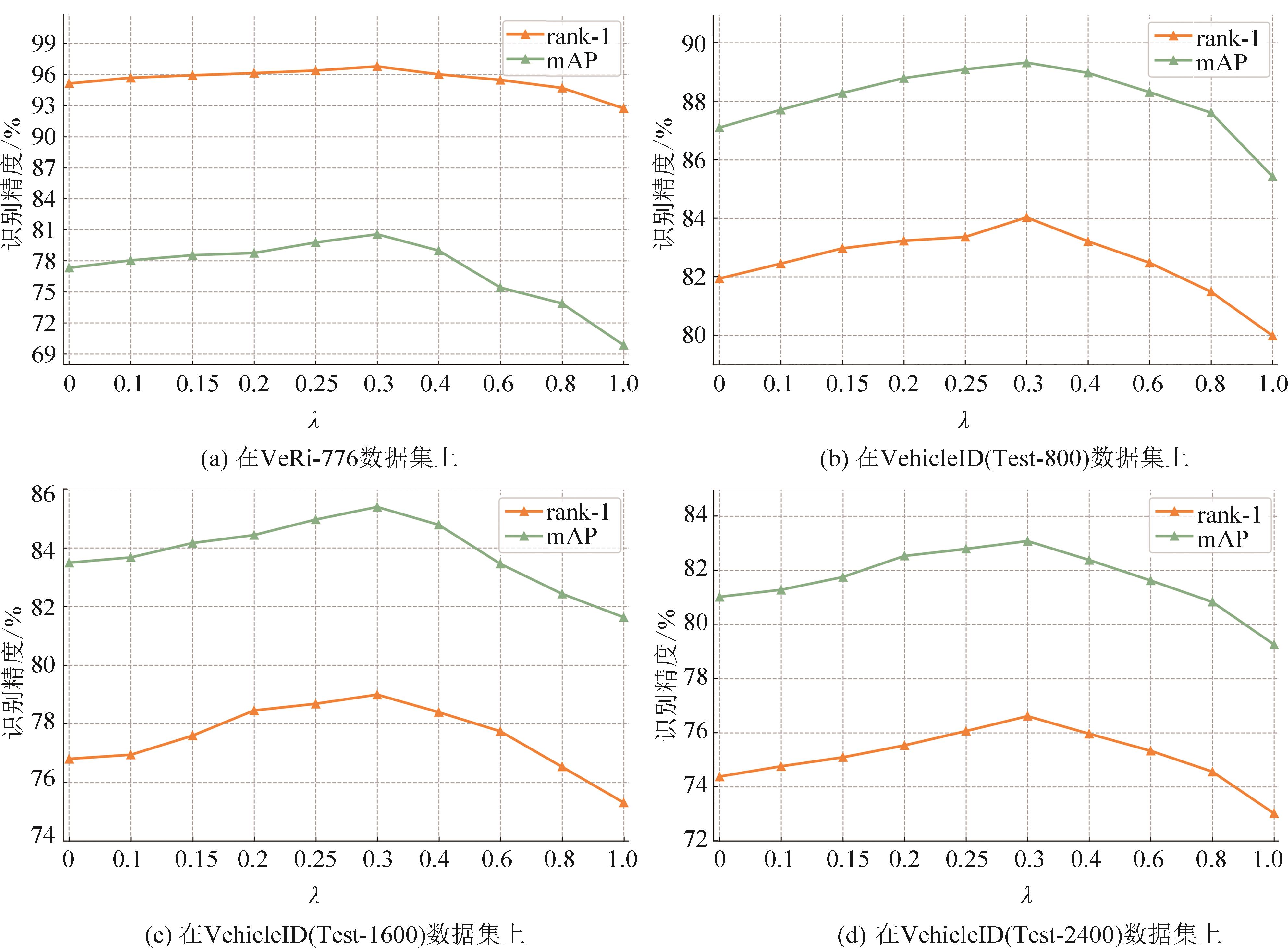
Fig. 9
Visual analysis of attention maps
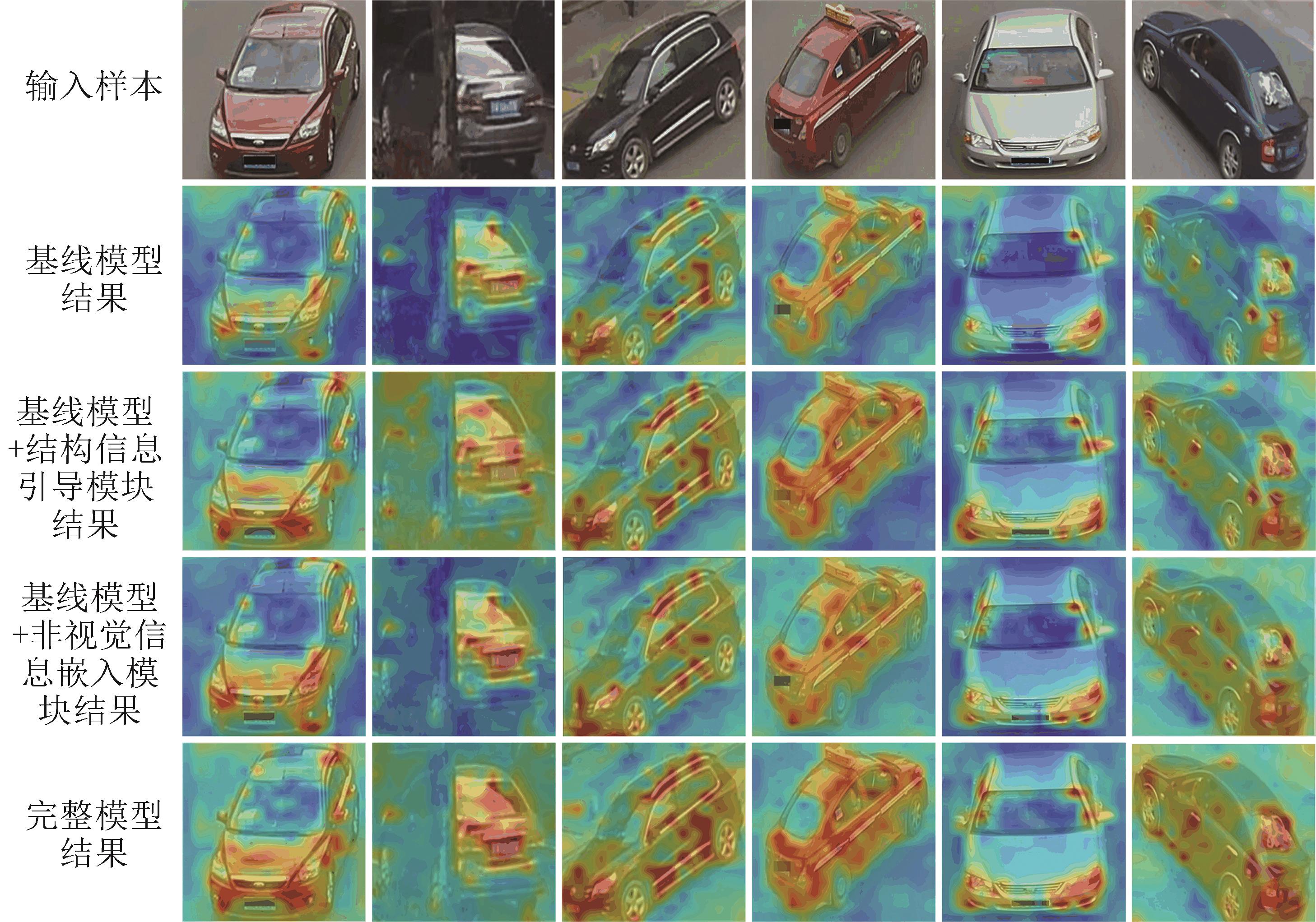
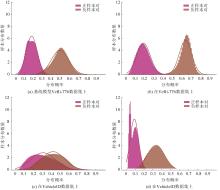
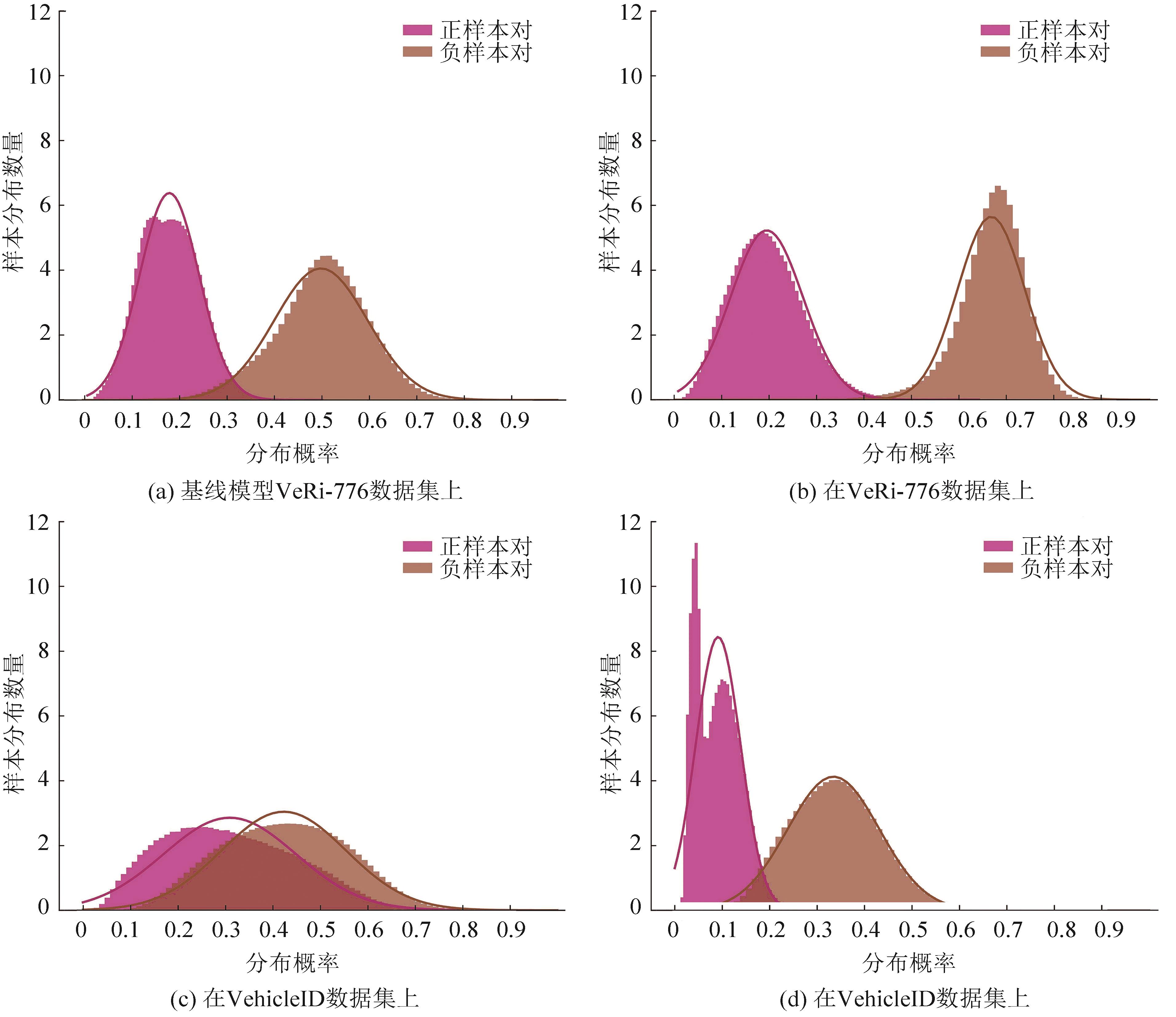
Fig. 10
Visual analysis of positive and negative sample pairs
| 1 | Quispe R, Lan Cuiling, Zeng Wenjun, et al. AttributeNet: Attribute Enhanced Vehicle Re-identification[J]. Neurocomputing (S0925-2312), 2021, 465: 84-92. |
| 2 | Tang Zheng, Naphade M, Birchfield S, et al. PAMTRI: Pose-Aware Multi-task Learning for Vehicle Re-identification Using Highly Randomized Synthetic Data[C]// 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway, NJ, USA: IEEE, 2019: 211-220. |
| 3 | Chen T S, Liu C T, Wu C W, et al. Orientation-Aware Vehicle Re-identification with Semantics-Guided Part Attention Network[C]// Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23-28, 2020, Proceedings, Part II. Heidelberg: Springer-Verlag, 2020: 330-346. |
| 4 | Dosovitskiy A, Beyer L, Kolesnikov A, et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale[C]// International Conference on Learning Representations. New York, USA: ICLR, 2021. |
| 5 | Chen Jieneng, Lu Yongyi, Yu Qihang, et al. TransUNet: Transformers Make Strong Encoders for Medical Image Segmentation[EB/OL]. (2021-02-08)[2021-10-21]. . |
| 6 | Liu Xinchen, Liu Wu, Mei Tao, et al. A Deep Learning-Based Approach to Progressive Vehicle Re-identification for Urban Surveillance[C]// Computer Vision-ECCV 2016. Cham: Springer International Publishing, 2016: 869-884. |
| 7 | Liu Hongye, Tian Yonghong, Wang Yaowei, et al. Deep Relative Distance Learning: Tell the Difference between Similar Vehicles[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2016: 2167-2175. |
| 8 | Sobel I, Feldman G. A 3x3 Isotropic Gradient Operator for Image Processing[J]. A Talk at the Stanford Artificial Project in. Piscataway, USA: IEEE, 1968: 271-272. |
| 9 | Hermans A, Beyer L, Leibe B. In Defense of the Triplet Loss for Person Re-Identification[EB/OL]. (2017-11-21) [2021-10-21]. . |
| 10 | Lou Yihang, Bai Yan, Liu Jun, et al. VERI-Wild: A Large Dataset and a New Method for Vehicle Re-identification in the Wild[C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2019: 3230-3238. |
| 11 | Liu Xinchen, Liu Wu, Mei Tao, et al. PROVID: Progressive and Multimodal Vehicle Reidentification for Large-Scale Urban Surveillance[J]. IEEE Transactions on Multimedia (S1520-9210), 2018, 20(3): 645-658. |
| 12 | Zhu Jianqing, Zeng Huanqiang, Lei Zhen, et al. A Shortly and Densely Connected Convolutional Neural Network for Vehicle Re-Identification[C]// 2018 24th International Conference on Pattern Recognition (ICPR). Piscataway, NJ, USA: IEEE, 2018: 3285-3290. |
| 13 | Zhou Yi, Shao Ling. Viewpoint-Aware Attentive Multi-View Inference for Vehicle Re-Identification[C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE, 2018: 6489-6498. |
| 14 | Hou Jinhui, Zeng Huanqiang, Zhu Jianqing, et al. Deep Quadruplet Appearance Learning for Vehicle Re-identification[J]. IEEE Transactions on Vehicular Technology (S0018-9545), 2019, 68(9): 8512-8522. |
| 15 | Zhu Yangchun, Zha Zhengjun, Zhang Tianzhu, et al. A Structured Graph Attention Network for Vehicle Re-Identification[C]// 28th ACM International Conference on Multimedia. New York, NY, USA: Association for Computing Machinery, 2020: 646-654. |
| 16 | Xu Yue, Jiang Na, Zhang Lei, et al. Multi-Scale Vehicle Re-identification Using Self-Adapting Label Smoothing Regularization[C]// ICASSP 2019-2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Piscataway, NJ, USA: IEEE, 2019: 2117-2121. |
| 17 | Liu Hongye, Tian Yonghong, Wang Yaowei, et al. Deep Relative Distance Learning: Tell the Difference Between Similar Vehicles[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2016: 2167-2175. |
| 18 | Liu Xinchen, Liu Wu, Mei Tao, et al. PROVID: Progressive and Multimodal Vehicle Reidentification for Large-Scale Urban Surveillance[J]. IEEE Transactions on Multimedia (S1520-9210), 2018, 20(3): 645-658. |
| 19 | Zhu Jianqing, Zeng Huanqiang, Huang Jingchang, et al. Vehicle Re-identification Using Quadruple Directional Deep Learning Features[J]. IEEE Transactions on Intelligent Transportation Systems (S1524-9050), 2020, 21(1): 410-420. |
| 20 | Khorramshahi P, Kumar A, Peri N, et al. A Dual-Path Model with Adaptive Attention for Vehicle Re-identification[C]// 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway, NJ, USA: IEEE, 2019: 6131-6140. |
| 21 | Chu Ruihang, Sun Yifan, Li Yadong, et al. Vehicle Re-identification With Viewpoint-Aware Metric Learning[C]// 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway, NJ, USA: IEEE, 2019: 8281-8290. |
| 22 | Chen Guangyi, Zhang Tianren, Lu Jiwen, et al. Deep Meta Metric Learning[C]// 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway, NJ, USA: IEEE, 2019: 9546-9555. |
| 23 | Peng Jinjia, Wang Huibing, Zhao Tongtong, et al. Learning Multi-region Features for Vehicle Re-identification with Context-Based Ranking Method[J]. Neurocomputing (S0925-2312), 2019, 359: 427-437. |
| 24 | Qian Jingjing, Jiang Wei, Luo Hao, et al. Stripe-Based and Attribute-Aware Network: a Two-Branch Deep Model for Vehicle Re-identification[J]. Measurement Science and Technology (S0957-0233), 2020, 31(9): 095401. |
| 25 | He Bing, Li Jia, Zhao Yifan, et al. Part-Regularized Near-Duplicate Vehicle Re-identification[C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2019: 3992-4000. |
| 26 | Liu Chenghuan, Huynh D Q, Reynolds M. Urban Area Vehicle Re-Identification with Self-Attention Stair Feature Fusion and Temporal Bayesian Re-Ranking[C]// 2019 International Joint Conference on Neural Networks (IJCNN). Piscataway, NJ, USA: IEEE, 2019: 1-8. |
| 27 | Sun Ziruo, Nie Xiushan, Xi Xiaoming, et al. CFVMNet: A Multi-Branch Network for Vehicle Re-identification Based on Common Field of View[C]// 28th ACM International Conference on Multimedia. New York, NY, USA: Association for Computing Machinery, 2020: 3523-3531. |
| 28 | He Yanguang, Dong Chenhe, Wei Ying. Combination of Appearance and License Plate Features for Vehicle Re-identification[C]// 2019 IEEE International Conference on Image Processing (ICIP). Piscataway, NJ, USA: IEEE, 2019: 3108-3112. |
| 29 | Meng Dechao, Li Liang, Liu Xuejing, et al. Parsing-Based View-Aware Embedding Network for Vehicle Re-identification[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2020: 7101-7110. |
| 30 | Zhu Xiangyu, Luo Zhenbo, Fu Pei, et al. VOC-RelD: Vehicle Re-identification based on Vehicle-Orientation-Camera[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway, NJ, USA: IEEE, 2020: 2566-2573. |
| 31 | Khorramshahi P, Peri N, Chen Juncheng, et al. The Devil is in the Details: Self-Supervised Attention for Vehicle Re-identification[C]// Computer Vision-ECCV 2020. Cham: Springer International Publishing, 2020: 369-386. |
| 32 | Guo Haiyun, Zhu Kuan, Tang Ming, et al. Two-Level Attention Network with Multi-grain Ranking Loss for Vehicle Re-identification[J]. IEEE Transactions on Image Processing (S1057-7149), 2019, 28(9): 4328-4338. |
| 33 | Lou Yihang, Bai Yan, Liu Jun, et al. Embedding Adversarial Learning for Vehicle Re-identification[J]. IEEE Transactions on Image Processing (S1057-7149), 2019, 28(8): 3794-3807. |
| 34 | Abnar S, Zuidema W. Quantifying Attention Flow in Transformers[C]// 58th Annual Meeting of the Association for Computational Linguistics. Stroudsburg, PA, USA: ACL, 2020: 4190-4197. |
| 35 | 李熙莹, 周智豪, 邱铭凯. 基于部件融合特征的车辆重识别算法[J]. 计算机工程, 2019, 45(6): 12-20. |
| Li Xiying, Zhou Zhihao, Qiu Mingkai. Vehicle Re-identification Algorithm Based on Component Fusion Feature[J]. Computer Engineering, 2019, 45(6): 12-20. |
| [1] | Dong Zhiming, Hu Zhongqi, Dai Haoran, Gao Jiancheng. An Automated Generation Method for Combat Simulation Scenarios Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1129-1145. |
| [2] | Li Xiaonan, Chao Tao, Ma Ping, Yang Ming, Wang Yuxuan. Robust Identification of Black-box Nonlinear SSM Using Expectation-maximization [J]. Journal of System Simulation, 2026, 38(5): 1146-1158. |
| [3] | Liu Yingang, Ma Ming, Zhang Ronghua. Dynamic Task Planning for Wargaming Based on Large Language Models [J]. Journal of System Simulation, 2026, 38(5): 1187-1204. |
| [4] | Su Hongjia, Zhang Cheng, Liu Fei. SoS Effectiveness Evaluation Method Based on Fuzzy Functional Dependency Network Analysis [J]. Journal of System Simulation, 2026, 38(5): 1224-1238. |
| [5] | Mei Huawei, Yang Penghui, Yu Yang. Ultra-short-term Photovoltaic Power Prediction Based on Improved PatchTST Considering Data Drift [J]. Journal of System Simulation, 2026, 38(5): 1239-1254. |
| [6] | Li Quan, Su Peng, Wan Haiying, Zhang Chengxi, He Zhijian, Ni Yiyang, Zhao Zhonggai, Liu Fei. Modeling of Penicillin Fermentation Process Based on a Multi-stage LHS-EPRCC Method [J]. Journal of System Simulation, 2026, 38(5): 1255-1276. |
| [7] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [8] | Shi Min, Guo Shisheng, Wang Suqin, Li Zhaoxin, Zhu Dengming. Annotation-free 6-DoF Grasp Detection Method Integrating Physical and Geometric Priors [J]. Journal of System Simulation, 2026, 38(5): 1290-1302. |
| [9] | Jiang Yanji, Xiao Xingyi, Dong Hao, Yu Miao, Huang Jinshan, Liu Daqian, Fei Bowen. Detection Method for 3D Lanes Based on Graph Relationship Optimization Integrating Point and Lane Features [J]. Journal of System Simulation, 2026, 38(5): 1303-1319. |
| [10] | Zhang Xin, Zhang Ping, Zhang Chen, Liu Wei, Han Boyang. Research on Calculation Model of Excavation Resistance Under Heterogeneous Soil Conditions [J]. Journal of System Simulation, 2026, 38(5): 1320-1332. |
| [11] | Wang Wei, Liu Dong, Cui Xinhao, Li Bo, Xiao Yiyong, Ren Yi. Multi-level Digital Model of Dynamic Earned Value Management for Complex Engineering Projects and Its Applications [J]. Journal of System Simulation, 2026, 38(5): 1350-1364. |
| [12] | Peng Lijun, Su Tingqi, Liu Peijin, He Lin, Zhou Xiewu, Zhang Minxin. Detection Method for Laboratory PPE Compliance Wearing Based on Human Key Points [J]. Journal of System Simulation, 2026, 38(5): 1365-1382. |
| [13] | Teng Jing, Tong Wencong, Zhang Zhongjie, Yao Xing, Li Junxian. Automatic Speed Guidance Method and Simulation Evaluation for Trams at Intersections [J]. Journal of System Simulation, 2026, 38(5): 1426-1439. |
| [14] | Jiang Shengchao, Pei Yunqing, Zhai Hongying, Wu Guojian, Gao Fang. Power Flow Calculation Based on Block-encoded Adiabatic Quantum Newton-Raphson Method [J]. Journal of System Simulation, 2026, 38(5): 1453-1465. |
| [15] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
